-
7/28/2019 TangentiaL Interpolation
1/4
Modeling Multi-Port Systems from FrequencyResponse Data via
Tangential Interpolation
Sanda Lefteriu and Athanasios C. AntoulasDepartment of
Electrical and Computer Engineering
Rice University
Houston, TX, USA
[email protected], [email protected]
AbstractSystem identification from frequency domain dataarises
in many areas, e.g., in control, electronics, mechanical andcivil
engineering and many other fields. Currently available tech-niques
work well for the single input single output case. However,for the
case of large numbers of inputs and outputs, present
methods are expensive. This paper proposes a new approachwhich
is based on the concept of tangential interpolation. Ourapproach
allows the identification of the underlying system usingsmall CPU
times. The numerical results we present show thatour algorithms
yield more accurate models in less time, whencompared to the
column-wise implementation of vector fitting.
I. INTRODUCTION AND MOTIVATION
Measuring the frequency response of a system, be it electri-cal,
mechanical, structural, etc, over a desired frequency range
provides data which can be used to identify the
underlyingsystem. This work employs measured scattering
parameters
as frequency domain data, but the approach is general and
can be applied to any kind of system identification. The
problem of building a macromodel which approximates
givenmeasurements of the response at various frequencies is
known
as the rational interpolation problem and has been
studiedthoroughly (see [1] for a survey). Most approaches are
based
on least-squares approximations, for instance vector fitting
[2],[3], [4], which is widely used in the electronics
community.
Some other algorithms, like [5], [6], [7], enforce passivity
by
construction.Our approach is based on the concept of tangential
interpo-
lation, using, as a main tool, the Loewner matrix pencil. We
are able to construct models of low complexity using a small
CPU time and are mainly addressing the case of systems with
a large number of inputs and outputs.
II . THEORETICAL ASPECTS
We start with the simple case of rational approximation
from scalar data: (si, i), i = 1, . . . , P, si = sj , i = j,and
si, i C. We aim at finding H(s) = n(s)d(s) , n, d
coprimepolynomials, such thatH(si) = i, i = 1, . . . , P . This
alwayshas a solution, e.g., the Lagrange interpolating
polynomial.
Our main tool, however, is the Loewner matrix which is
constructed by partitioning the data in disjoint sets:
(i, wi), i = 1, . . . , k and (j , vj), j = 1, . . . , h ,
where h, k P2 such that k + h = P, using the formula:Li,j =
vi wji k
, L
Chk.
There are many reasons to use this tool. The degree ofthe
minimal interpolant is determined from the rank of the
Loewner matrices constructed using all possible partitions.
Moreover, the Loewner matrix has a system theoretic inter-
pretation in terms of observability and controllability
matrices.Finally, for data consisting of a single point and
derivatives at
that point, the Loewner matrix has Hankel structure. Thus,
the
Loewner matrix generalizes the Hankel matrix.
A. Tangential interpolation
Sampling matrix data directionally on the left and on the
right leads to the concept of tangential interpolation. The
right
interpolation data is given as
{(i, ri,wi) | i C, ri Cm1,wi Cp1, }, (1)for i = 1, . . . , k,
or, more compactly,
= diag [1, , k] Ckk, (2)R = [r1, , rk] Cmk, (3)W = [w1, , wk]
Cpk, (4)
while the left interpolation data is given as
{(j , j,vj) | j C, j C1p,vj C1m, }, (5)for j = 1, . . . , h, or,
more compactly,
M = diag [1, , h] Chh, (6)
L =
1...
h
Chp, V =
v1
...
vh
Chm. (7)
The rational interpolation problem consists of finding a
realization in descriptor form [E,A,B,C,D], such that
theassociated transfer function H(s) = C(sE A)1B + D,satisfies the
right and left constraints
H(i)ri = wi, jH(j) = vj . (8)
The key tools we use for addressing this are the Loewner and
the shifted Loewner matrices, associated with the data. We
refer to [8] for more details on these concepts.
B. The Loewner and the shifted Loewner matrices
Given a set Z = {z1, , zP} of points in the complexplane and the
rational matrix function H(s) at those points:{H(z1), ,H(zP)}, we
can partition Z as:
Z ={
1,
, k} {
1,
, h}
,
978-1-4244-4489-2/09/$25.00 2009 IEEE SPI 2009
-
7/28/2019 TangentiaL Interpolation
2/4
where h, k P2 and k + h = P. We build the right and leftdata by
selecting appropriate sampling directions ri and j.
The Loewner and the shifted Loewner matrices are defined
in terms of the data (1) and (5) as
L=
v1r11w1
11 v1rk1wk
1k...
. . ....
vhr1hw1h1
vhrkhwkhk
Chk, (9)
L=
1v1r111w111
1v1rkk1wk1k
.... . .
...hvhr11hw1
h1 hvhrkkhwk
hk
Chk.(10)
Each entry above is scalar, as it is obtained by taking
inner
products of the left and right data. The following lemma [8]
provides the solution to the tangential interpolation problemin
a simplfied case.
Lemma II.1. Assume that k = h, that the matrix pencil
(L,L) is regular, and thatj , i / (L,L). Then E = L,A = L, B =
V, C = W and D = 0 is a minimalrealization of an interpolant of the
data. Thus, the associated
transfer function H(s) = W(L sL)1V satisfies both leftand right
interpolation conditions.
III . MODELING SCATTERING PAR AM ET ER S
Modeling multi-port systems from frequency-domain data
(for instance, scattering parameters) is formulated as a
rational
approximation problem as follows. An LTI system approxi-
mately models the data set containing k measurements of
theS-parameters of a device with p input and output ports
fi,S(i) := S(i)11 . . . S
(i)1p
... ... ...
S(i)p1 . . . S
(i)pp
, i = 1, , k,if the value of the associated transfer function
evaluated at
j 2fi = ji, H(ji), is close to the measured S(i), i.To obtain a
real system, the S-parameters at the complex
conjugate values of the sample points ji are set equal
thecomplex conjugates of the measurements S(i), namely S(i).
A. The Loewner matrix pencil in the complex implementation
We use columns and rows of the identity matrix of dimen-sion p
as sampling directions ri and i, respectively.Remark. The fact that
the p2 entries of the matrix can becollapsed into one vector of
dimension
pmakes this method
suitable for devices with a large number of ports.
The right interpolation data can be chosen asi = ji, ri,wi =
S
(i)ri
. (11)
for i = 1, , k2 . As right directions, we use ri = em Rp1, with
m = p for i = p c1 and m = 1, , p 1 for
i = p c1 + m, for some c1 Z, where em denotes the m-thcolumn of
the indentity matrix Ip. Hence, the right data wiare columns
ofS(i). More compactly,
= diag [j1, , jk] Ckk, (12)R = [r1, , rk] Cpk, (13)W = [w1,
, wk]
Cpk, (14)
while the left interpolation data are constructed asi = ji, i,vi
= iS(i)
, (15)
with i = rTi and the left data vi are rows ofS(i).
Compactly,
M = diag [
j1,
,
jk]
Ckk, (16)
L =
1 k
, L Ckp, (17)
V =
v1 vk
, V Ckp. (18)
After the tangential data have been identified, the Loewnerand
shifted Loewner matrices are built as in (9)-(10).
B. The Loewner matrix pencil in the real implementation
To guarantee that the resulting system is real, the right
interpolation data can be chosen asji, ji; ri, ri;wi = S(i)ri,wi
= S(i)ri
, (19)
for i = 1, , k2 , with ri as in Sect. III-A. More compactly, =
diag j1, j1, , j k2 , j k2 , (20)R =
r1, r1, , rk
2
, r k2
Cpk, (21)
W =w1, w1, , wk
2
, w k2
Cpk, (22)
while the left interpolation data is constructed asji+ k
2
, ji+ k2
; i, i;vi = iS(i+ k
2),vi = iS
(i+ k2)
.
(23)for i = 1, , k2 , with i as in Sect. III-A. More
compactly,
M = diagj1+ k
2
, j1+ k2
, , jk, jk
, (24)
L =
1
1 k
2
k2
, L Ckp, (25)
V =
v1 v
1 vk
2
vk2
, V Ckp. (26)
Without loss of generality, we assumed an even number of
samples. Next, the Loewner and shifted Loewner matrices are
built using Eq. (9)-(10). As a last step, a change of basis
is
to be performed to ensure real matrix entries: = ,M = M, L = L,
V = V, R = R, W = WL = L, L = L, where
= diag [, . . . , ] Ckk, = 12
1 j1 j
.
IV. IMPLEMENTATION
We use all measurements to construct the Loewner matrix
pencil, in the complex (Sect. III-A) or real
implementation(Sect. III-B). Lemma II.1 assumes that the resulting
Loewner
matrix pencil is regular. However, when too many measure-
ments are available, the pencil is singular, so one needs to
project out the singular part. Assuming that x {i}{i},rank(xL L)
=: n, one can perform the singular valuedecomposition:
xL L = Y1X1, (27)where Y1 Ckn, X1 Cnk and n is the dimension
ofthe regular part of xL L. Furthermore, it is precisely theorder
of the underlying system. Using the singular vectors asprojectors,
the realization is given as E = Y1LX1, A =
Y
1
LX1, B = Y
1
V, C = WX1 with D = 0 [8].
-
7/28/2019 TangentiaL Interpolation
3/4
This approach is computationally expensive for data sets
with a large number of samples k, as the cost of the SVDof the
matrix xL L scales with k3. This is overcome byadaptive approaches
presented in [9], [10], [11].
A. Remarks on the D-term, stability and passivity
Our realizations have a zero D-term. Nonetheless, systems
may have D = 0. Suppose the order of the underlying systemwith p
ports is n and D = 0. This representation is equivalentto a system
of order n +p with E singular, A invertible andD = 0. The poles of
the new system are the n poles ofthe original system together with
p infinite ones. Given such arealization, it can be written in the
original form by recovering
the D-term. This is illustrated by the examples in Sect. V.
Our algorithms are able to identify the underlying system,
therefore, for data sets obtained from real-world systems,
theresulting models are stable (after extracting the necessary
D-
term). Passivity is not enfored by construction, thus out ofband
passivity violations may occur. Like in the VF approach,
these can be corrected by an a posteriori passivation
enforce-
ment based on first-order perturbations, for example [12],
[13].
Passivity can also be enforced by contruction in the
currentframework, as in [14].
V. NUMERICAL RESULTS
We compare our approach to vector fitting on an a-priorigiven
system and on one where only measurements are avail-
able, in terms of accuracy and CPU time required to produce
a macromodel. The accuracy was assessed using:
the normalized
H-norm of the error system, defined as:
H error = maxi=1...k 1H(ji) S(i)
maxi=1...k 1S(i)
,where 1() denotes the largest singular value of ().
the normalized H2-norm of the error system:
H2 error =k
i=1
H(ji) S(i)2Fki=1
S(i)2F
,
where 2F stands for the Frobenius-norm, namely thesum of the
magnitude squared of all p2 entries.
We used the column-wise implementation of fast, relaxedvector
fitting [2], [15], [16] with the following options:
the starting poles are complex conjugate pairs with weak
attenuation, distributed over the frequency band each column was
fitted using 5 iterations.
The experiments were performed on a Pentium Dual-Core
at 2.2GHz with 3GB RAM.
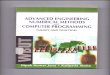
A. A-priori given system with 2 ports, 14 poles andD = 0We
consider a system of order 14 with p = 2 ports and
D = 0 [9], [10]. We take k = 608 samples of the transferfunction
between 101 and 101 rad/sec (Fig. 1(a)).
Fig. 1(b) shows the first 30 normalized singular values ofthe
Loewner and shifted Loewner matrices (the rest are zero).The
Loewner matrix has rank 14, while the shifted Loewnermatrix has
rank 16, so, based on the drop of singular values
(Eq. (27)), we generate models of order 16 with D = 0. Toyield a
realization of order 14, VF was given 7 starting poles.
101
100
101
80
70
60
50
40
30
20
10
0
Frequency (rad/sec)
Magnitude(dB)
Singular Value Plot
(a) Original system
0 5 10 15 20 25 30
1015
1010
105
100
index
logarithmic
Normalized Singular Values
LLsLL
(b) Singular value drop
Fig. 1. Original system and singular value drop of the Loewner
matrix pencil
Table I presents the CPU time and the errors for the
resultingmodels. All proposed algorithms identified the original
system,
while VF did not. If VF is given N = 14 starting poles,
theresulting errors are similar to ours. Each column is fit by
the
same poles, so the realization has order n = 28 and each polehas
multiplicity 2. Recovering the original system requires
anadditional compacting step [3].
Algorithm CPU (s) H error H2 error
VF 0.93 1.1324 5.8327e-002SVD Complex 0.88 1.3937e-010
5.8900e-022
SVD Real 1.82 1.3146e-012 9.4168e-026
TABLE IRESULTS FOR k = 608 NOISE-FREE MEASUREMENTS OF AN ORDER
14
SYSTEM WITH p = 2 PORTS
B. Example involving measurements
Measurements were provided by CST AG. For examples
with a larger number of ports, see [9]. This set contains k
=
200 frequency samples between 5MHz and 1GHz of a systemwith p =
16 ports. Fig. 2(a) shows the normalized singularvalues of the
Loewner and shifted Loewner matrices.
0 50 100 150 20010
16
1014
1012
1010
108
106
104
102
100
X: 27Y: 0.03802
index
logarithmic
Normalized Singular Values
X: 28Y: 0.0008019
X: 43Y: 0.0009489
X: 44Y: 7.034e005
LL
sLL
(a) SVD drop
0 50 100 150 200 250 300 350 40010
5
104
103
102
101
100
X: 27Y: 0.3705
Hankel SVs of the VF model
(b) HSVs of the VF model
Fig. 2. Drop of the singular values of the Loewner matrix pencil
and drop
of the Hankel singular values of the VF model of size n =
352
We notice the same behaviour as in the previous example.
The singular values of the Loewner matrix decay 2 ordersof
magnitude between the 27th and 28th, while those of the
shifted Loewner matrix decay 1 order of magnitude betweenthe
43rd and 44th. This plot allows to identify the order of the
system and suggests that there is an underlying D-term. We
build models of order n = 43 with D = 0, so after recoveringthe
D-term, we have an order n = 43 16 = 27 model.Table II summarizes
the results. Vector fitting was required to
produce an asymptotic D matrix, but the closest order modelto n
= 27 was n = 32. To obtain comparable errors, VFneeds to built an
order n = 352 model. Fig. 2(b) shows that
-
7/28/2019 TangentiaL Interpolation
4/4
the Hankel singular values of the VF n = 352 model exhibitno
decay around the 27th singular value. Thus, reducing to
order n = 27 using balanced truncation (BT), as also donein
[17], leads to unsatisfacorty results. One could also try a
compacting step, as presented in [3].
Algorithm CPU time (s) H error H2 errorVF (n=32, D = 0) 0.54
1.4315e+000 1.2178e-001
Complex (n=43, D = 0) 0.21 3.4795e-002 2.0945e-005Real (n=43, D
= 0) 0.14 8.3858e-002 3.5407e-005VF (n=352, D = 0) 3.63 7.9734e-002
7.4647e-005
VF & BT (n=27, D = 0) 5.46 6.5170e-001 5.8586e-002
TABLE IIRESULTS FOR CONSTRUCTING A M ODEL FROM A DATA SET
OBTAINED
FROM A DEVICE WITH p = 16 PORTS
Our model constructed with the complex approach and the
VF model of order n = 32 are shown in Fig. 3. We alsopresent
plots of the magnitude and angle of two entries of the
S-parameters in Fig. 4. We compare the measured S3,2 andS7,15
entries to the model obtained with our complex approachand to the
order n = 32 model obtained with VF. The reasonbehind the poor
performance of vector fitting shown in Fig.
3 and 4 is the fact that each one of the 16 columns of
theS-parameters are fit by 32/16 = 2 poles. Thus, each columnshares
only two common poles, which is clearly too restrictive.
107
108
109
1010
4
3.5
3
2.5
2
1.5
1
0.5
0
0.5
Frequency (rad/sec)
Magnitude(dB)
Singular Value Plot
Data
Model
(a) Our Approach (n = 43, D = 0)
107
108
109
1010
35
30
25
20
15
10
5
0
5
Frequency (rad/sec)
Magnitude(dB)
Interpolating system obtained with VF
Data
Model
(b) VF (n = 32, D = 0)
Fig. 3. Models for a device with p = 16 ports
107
108
109
1010
50
45
40
35
30
25
20
15
10
Frequency (rad/sec)
Magnitude(dB)
Magnitude of S3,2
data
our model
VF model
(a) Magnitude ofS3,2
107
108
109
1010
200
150
100
50
0
50
100
150
200
Frequency (rad/sec)
Angle(degrees)
Angle of S3,2
data
our model
VF model
(b) Angle ofS3,2
107
108
109
1010
40
35
30
25
20
15
10
Frequency (rad/sec)
Magnitude(dB)
Magnitude of S7,15
data
our model
VF model
(c) Magnitude ofS7,15
107
108
109
1010
200
150
100
50
0
50
100
150
200
Frequency (rad/sec)
Angle(degrees)
Angle of S7,15
data
our model
VF model
(d) Angle ofS7,15
Fig. 4. Comparison of the performance in modeling different
entries of themeasured S-parameters obtained from a device with p =
16 ports
VI. CONCLUSION
This paper summarizes some of the features of a new
approach to modeling multi-port systems from frequency
domain data. For details, see [9]. It is based on the
concept
of tangential interpolation and empoys as a main tool theLoewner
matrix pencil, which is motivated by a systemtheoretic
consideration [8]. Tangential interpolation was also
adopted for model order reduction [18]. In this note, we
are adressing the issue of large number of ports. Our main
application used the scattering parameters but, due to the
generality of our approach, other kinds of frequency-domain
data can be considered. We compared the performance ofour method
to state-of-the-art vector fitting on two numerical
examples and concluded that our approach is faster and,moreover,
identifies the order of the underlying system.
REFERENCES
[1] A. C. Antoulas, Approximation of Large-Scale Dynamical
Systems.Philadelphia: SIAM, 2005.
[2] B. Gustavsen and A. Semlyen, Rational approximation of
frequencydomain responses by vector fitting, IEEE Trans. Power
Del., vol. 14,pp. 10521061, Jul. 1999.
[3] , A robust approach for system identification in the
frequencydomain, IEEE Trans. Power Del., vol. 19, pp. 11671173,
Jul. 2004.
[4] D. Deschrijver, Broadband macromodeling of linear systems by
vectorfitting, Ph.D. dissertation, Universiteit Antwerpen, Oct.
2007.
[5] S.-H. Min and M. Swaminathan, Construction of broadband
passivemacromodels from frequency data for simulation of
distributed inter-connect networks, IEEE Trans. Electromagn.
Compat., vol. 46, no. 4,pp. 544558, Nov. 2004.
[6] R. Gao, Y. Mekonnen, W. Beyene, and J. Schutt-Aine,
Black-boxmodeling of passive systems by rational function
approximation, IEEETrans. Adv. Packag., vol. 28, no. 2, pp. 209215,
May 2005.
[7] A. Woo and A. Cangellaris, Real-part sufficiency and its
application tothe rational function fitting of passive
electromagnetic responses, IEEE
International Microwave Symposium, pp. 99102, June 2007.[8] A.
J. Mayo and A. C. Antoulas, A framework for the solution of the
generalized realization problem, Linear Algebra and Its
Applications,vol. 405, pp. 634662, 2007.
[9] S. Lefteriu and A. C. Antoulas, A new approach to model
multi-portsystems from frequency response data, IEEE Trans.
Comput.-Aided
Design Integr. Circuits Syst., submitted for publication.[10] S.
Lefteriu and A. Antoulas, A new adaptive approach to modeling
measured multi-port scattering parameters, in Scientific
Computing inElectrical Engineering. Springer, 2008, accepted for
publication.
[11] S. Lefteriu, New approaches to modeling multi-port
scattering param-eters, Masters thesis, Rice University, Houston,
TX, 2008.
[12] S. Grivet-Talocia, Passivity enforcement via perturbation
of Hamilto-nian matrices, IEEE Trans. Circuits Syst. I, vol. 51,
pp. 17551769,Sep. 2004.
[13] D. Saraswat, R. Achar, and M. Nakhla, Fast passivity
verification andenforcement via reciprocal systems for
interconnects with large ordermacromodels, IEEE Trans. VLSI Syst.,
vol. 15, pp. 4859, Jan. 2007.
[14] A. C. Antoulas, On the construction of passive models from
frequencyresponse data, Automatisierungstechnik, vol. 56, pp.
447452, Aug.2008.
[15] B. Gustavsen, Improving the pole relocation properties of
vectorfitting, IEEE Trans. Power Del., vol. 21, no. 3, pp.
15871592, Jul.2006.
[16] D. Deschrijver, M. Mrozowski, T. Dhaene, and D. De Zutter,
Macro-modeling of multiport systems using a fast implementation of
the vectorfitting method, IEEE Microw. Wireless Compon. Lett., vol.
18, no. 6,pp. 383385, June 2008.
[17] F. Ebert and T. Stykel, Rational interpolation, minimal
realization andmodel reduction, DFG Research Center MATHEON, Tech.
Rep. 371-2007, 2007.
[18] P. Li and W. Shi, Model order reduction of linear networks
with massiveports via frequency-dependent port packing, in DAC 06:
Proceedingsof the 43rd annual conference on Design automation, pp.
267272.









![New Iterative Methods for Interpolation, Numerical ... · and Aitken’s iterated interpolation formulas[11,12] are the most popular interpolation formulas for polynomial interpolation](https://img.dokumen.tips/doc/110x75/5ebfad147f604608c01bd287/new-iterative-methods-for-interpolation-numerical-and-aitkenas-iterated-interpolation.jpg)

















