Embed Size (px)
Citation preview
TRACKING HUMANS USING MULTIPLEPAIRS OF PTZF CAMERAS ANDWIDE-ANGLE CAMERAS
Author:
Abhilash Jindal, Y7009
Brajesh Kushwaha, Y7119
Supervisor:
Dr. K. S. Venkatesh
Dr. Krithika Venkataramani
AIM
Identifying and tracking a VIP using 3 pairs of PTZF and wide-angle cameras.
The final system's performance can be can be described as:- Detecting all the humans in the field of view of the wide-
angle cameras. Targeting people one by one by the wide-angle cameras. Passing the track to the PTZF camera from the corresponding
wide-angle camera. Simultaneous zooming of all the PTZF cameras onto each
person's face. Cross-checking the combined outputs of the PTZF cameras
against a human face-database to recognize our VIP. Tracking the identified VIP by the PTZF cameras
simultaneously.
OVERVIEW OF THE WORK
The work has been divided into 5 parts:
Control of the PTZF cameras. Human-Tracking using single camera. Transformation of the pixels in wide-angle camera to PTZF
camera. Fusion of data from 3 wide-angle camera for improved
tracking. Recognizing individual from the output of 3 PTZF
cameras.
The last part is being done as a part of a different B.Tech Project under the supervision of Dr. Krithika Venkataramani.
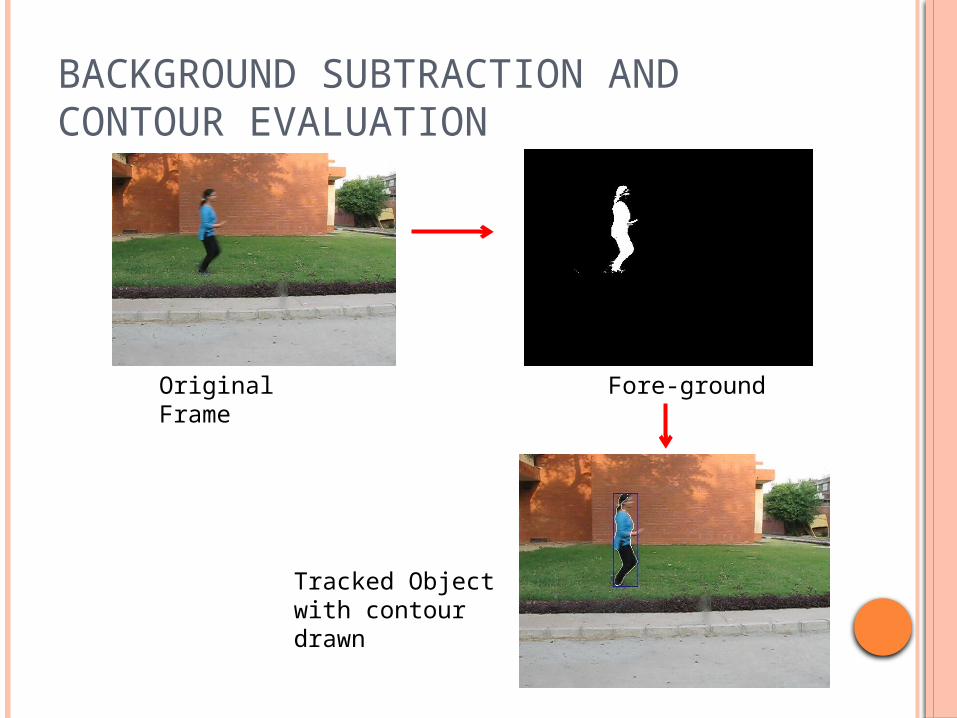
BACKGROUND SUBTRACTION AND CONTOUR EVALUATION
Original Frame Fore-ground
Tracked Object with contour drawn
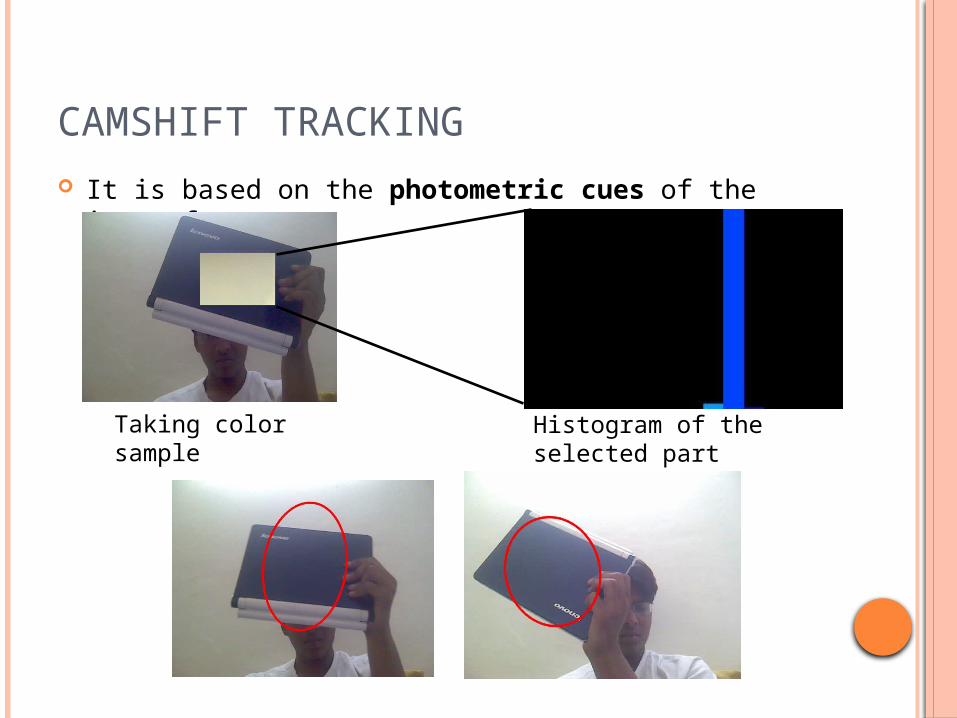
CAMSHIFT TRACKING It is based on the photometric cues of the image
frame.
Taking color sample
Histogram of the selected part
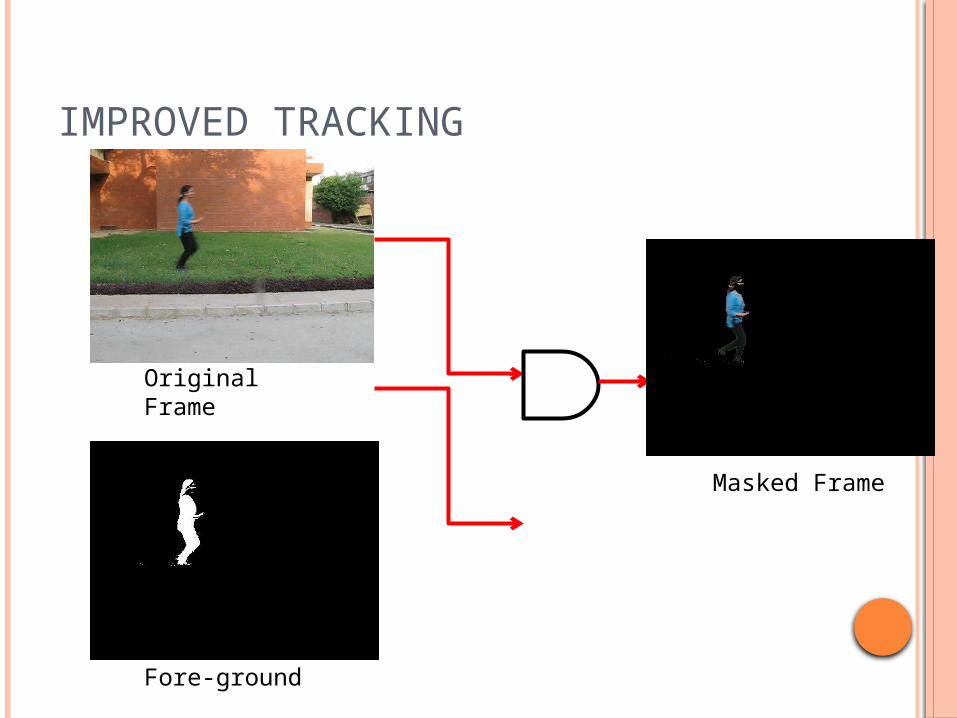
IMPROVED TRACKING
Original Frame
Fore-ground
Masked Frame
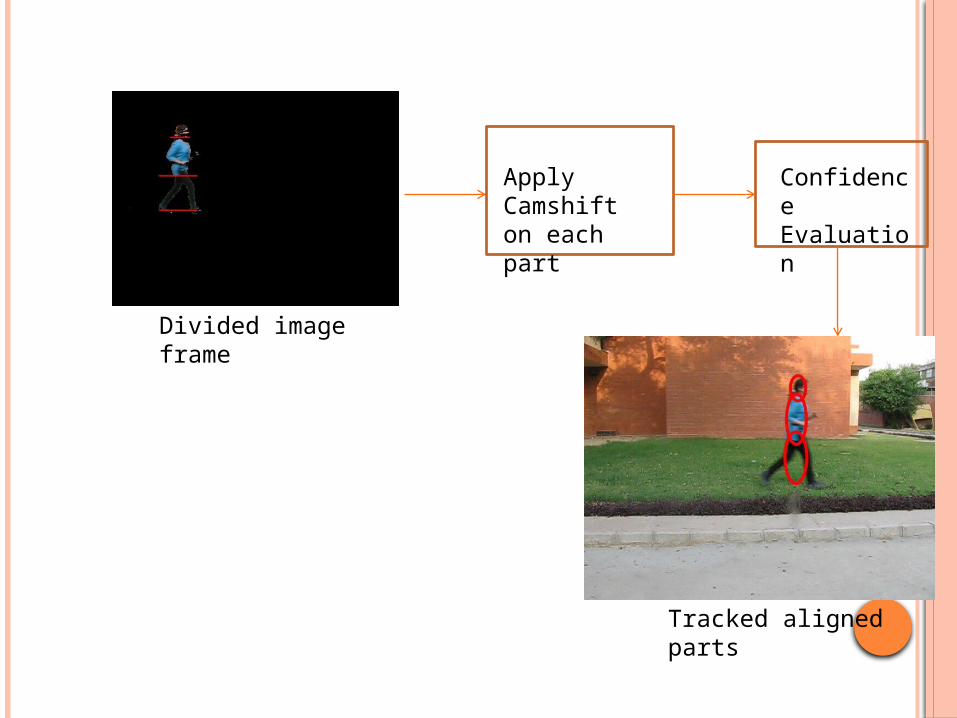
Apply Camshift on each part
Confidence Evaluation
Divided image frame
Tracked aligned parts
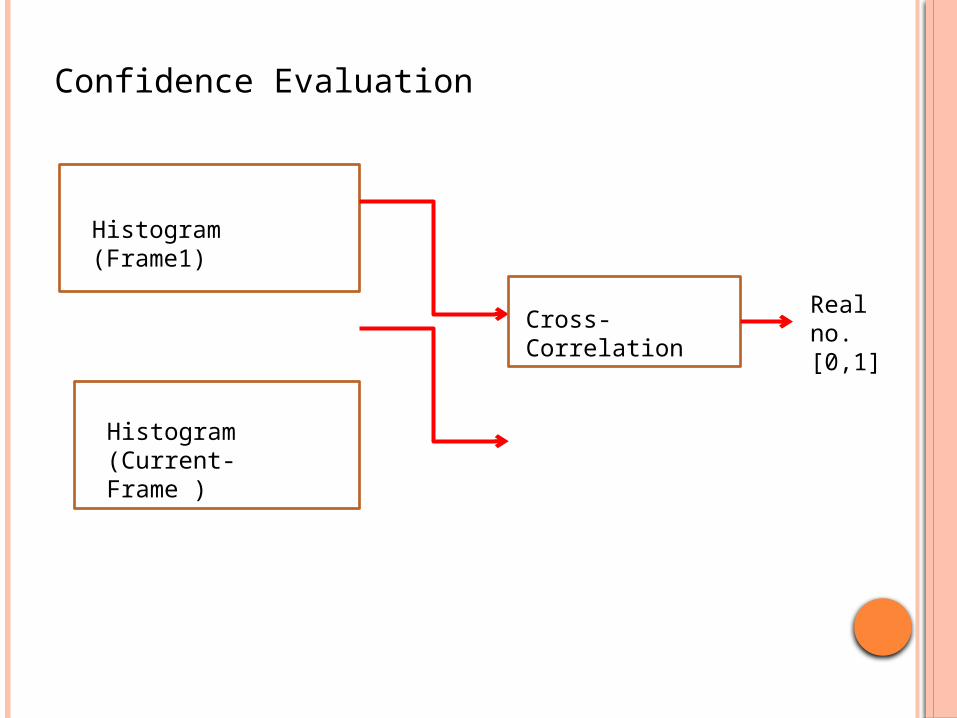
Confidence Evaluation
Histogram (Frame1)
Histogram (Current-Frame )
Cross- Correlation
Real no. [0,1]
ALIGNING TRACKERS If confidence(tracker Legs) < threshold,
flag(Legs)=0; If(flag(Legs)==0),
if(flag(torso)!=0)
align(Legs, torso);
else
align(Legs, Head);
Similarly for the other two trackers.
KALMAN FILTERING
where,
zk: Measurementxk: stateuk: control inputwk: process noisevk: measurement noiseF: transfer matrix
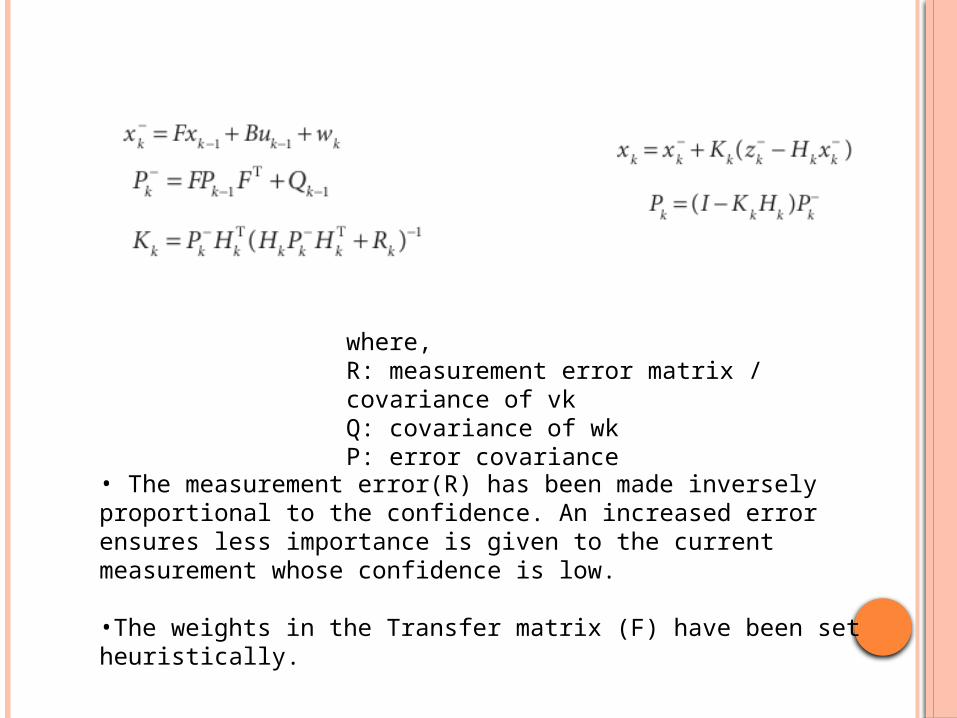
where,R: measurement error matrix / covariance of vkQ: covariance of wkP: error covariance
• The measurement error(R) has been made inversely proportional to the confidence. An increased error ensures less importance is given to the current measurement whose confidence is low.
•The weights in the Transfer matrix (F) have been set heuristically.



xk = State of the model(after kth
update)
zk = kth measurement of parameters

CURRENT PROGRESS ON FULL OCCLUSION

WORK TO BE DONE
Designing a controller for the PTZF camera for a better time-response during tracking.
Transforming wide-angle camera co-ordinates to the corresponding PTZF camera.
Extending the single camera tracking to multi-camera tracking.

REFERENCES A. Ariel, G. Mikhail, et al. Robust Real-Time background
subtraction based on Local Neighborhood patterns. EURASIP Journal on Advances in Signal Processing, 2010, 2010.
M.D. Dixit, Combining edge and color features to track partially occluded humans, M.Tech thesis, Department of Electrical Engineering, May 2009





























