Embed Size (px)
DESCRIPTION
SYSTÉMY POČÍTAČOVÉHO VIDĚNÍ ROBOTŮ. Co je POČÍTAČOVÉ VIDĚNÍ ?. Počítačové vidění jsou technické prostředky, které se snaží napodobit schopnosti lidského vidění. Jaké úlohy řeší POČÍTAČOVÉ VIDĚNÍ ?. Navigace v prostoru Rozpoznání tvaruporozumění scéně Kontrola rozměrů. - PowerPoint PPT Presentation
Citation preview

SYSTÉMYPOČÍTAČOVÉHO
VIDĚNÍ ROBOTŮ

Co je POČÍTAČOVÉ VIDĚNÍ ?
Počítačové vidění jsou technické prostředky, které se snaží napodobit schopnosti lidského vidění.
Jaké úlohy řeší POČÍTAČOVÉ VIDĚNÍ ?
1)Navigace v prostoru2)Rozpoznání tvaru porozumění scéně3) Kontrola rozměrů
Je POČÍTAČOVÉ VIDĚNÍ složité?
1)Ztráta informace o perspektivě2)Jas v obraze závisí na mnoha parametrech
(odrazivost, orientaci povrchu,..)3)Velké množství dat4)Šum5)Obtížné globální zpracování - detail

SYSTÉMY POČÍTAČOVÉHO VIDĚNÍ Modulární
Kamera PC PLC
Kompaktní Inteligentní kamery
Kamera IMG.P/PLC Kamera
Dle strategie výrobců Obecné systémy
Dedikované systémy
Osv
ětlo
vač
Osv
ětlo
vač
Osv
ětlo
vač

ČIDLA PRO SNÍMÁNÍ OBRAZOVÉ INFORMACE CCD (Charge Coupled Device)
Princip činnosti
Provedení
[Obrázky převzaty z literatury č.4]

UKÁZKY USPOŘÁDNÍ SYSTÉMŮ PRO PV Modulární systém s analogovou kamerou
AK – analogová snímací kamera, SO – snímač obrazu, US – úprava signálu, U – napájecí napětí kamery, PO – převodník obrazu (framegrabber), P – mikroprocesor, ADC – převodník A/D, RAM – paměť, FPGA – programovatelné hradlové pole, V/V– digitální vstupy/výstupy, trig – spouštění kamery, FLASH – vybavení záblesku
[Obrázek převzat z literatury č.3]

Modulární systém s digitální kamerou
DK – digitální snímací kamera, SO – snímač obrazu, P – mikroprocesor, ADC – převodník A/D, RAM – paměť, FPGA – programovatelné hradlové pole, V/V – digitální vstupy/výstupy, TRIG – spouštění kamery, FLASH – vybavení záblesku, ADAPT – adaptační deska, U – napájecí napětí kamery
[Obrázek převzat z literatury č.3]

OSVĚTLOVAČE SYSTÉMŮ PV
Dle funkce: odrazivé protisvětlo
Dle provedení: LED VýbojkaŽárovkyZářivky
Parametry: Barva světla PolarizaceTvar světlaStálost
[Obrázek převzat z literatury č.3]

Koaxiální osvětlení
[Obrázky převzaty z literatury č.5]

[Obrázky převzaty z literatury č.5]

Vliv barvy světla na zpracování obrazu[Obrázky převzaty z literatury č.5]

FESTO








IFM

LEGEND je firma DVT z USA (Inteligentní kamery)
Integrace – kamery, jednotky pro zprac., řídící jednotkyProcesor Texas Instruments DSP24V DC, 8 konfigurovatelných I/O
[Obrázek převzat z literatury č.3]

IMAGECHECKER P400 od firmy MATSUSHITA(modulární systém)
připojení 12 kamerIntel Pentium Otevřená architektura512MB 20GB HDDLAN Port 10/100 MbitMultikamerové zpracování
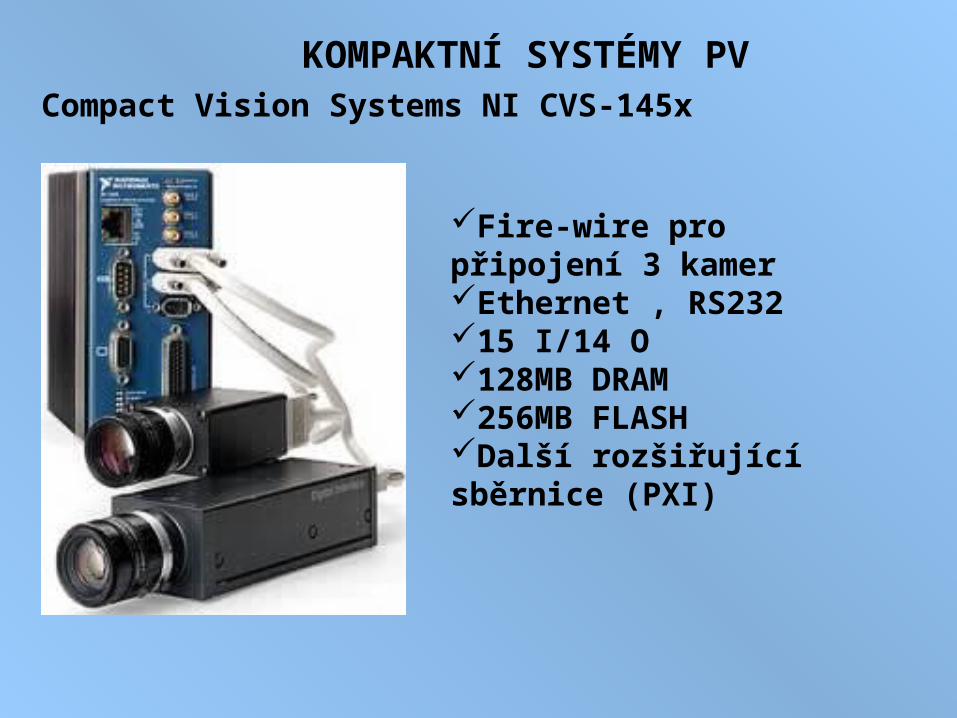
KOMPAKTNÍ SYSTÉMY PV Compact Vision Systems NI CVS-145x
Fire-wire pro připojení 3 kamerEthernet , RS23215 I/14 O128MB DRAM256MB FLASHDalší rozšiřující sběrnice (PXI)


Základní parametry
Oblasti použití:Měření vzdálenosti, navádění při
pohybu,

FUNKCE OBECNÝCH SYSTÉMŮ 2D - měření Třídění Detekce pozice Segmentace
Kontrola chybějících částíOCR
Čtení kódů
Měření natočení
Kontrola montáže
[Obrázky převzaty z literatury č.5]

ZÁKLADNÍ PŘÍSTUPY PŘI ZPRACOVÁNÍ OBRAZŮ Půběh zpracování obrazu
Snímání PředzpracováníHledánípříznaků
Porozuměníobjektům
Filtrace Transformace měřítka
Detekce hran Segmentace
RozpoznáváníSrovnání se vzorem Relační modely

ZÁKLADNÍ ÚLOHY PV
Rozpoznání vzoru v obraze
Rozpoznání vzoru v obraze podle barev
[Obrázky převzaty z literatury č.5]

Detekce hran
[Obrázky převzaty z literatury č.5]

Využití detekce hran při měření rozměrů
Segmentace objektů
[Obrázky převzaty z literatury č.5]

Detekce defektů na povrchu
[Obrázky převzaty z literatury č.5]

Detekce tvaru skenováním
[Obrázky převzaty z literatury č.5]

Měření intenzity
[Obrázky převzaty z literatury č.5]

PŘÍLKAD NASAZENÍ PV V ROBOTICE
Na jeden z dílů je při měření promítnuta sada proužků měřícího laseru a poté vyhodnocena jeho poloha i jeho náklon vůči robotu. Výsledkem oměření je stanovení korekcí pro svařovací program robota.
[Obrázek:Centrum Strojového viděníČVUT]

KONCEPCE KOGNITIVNÍCH ROBOTŮ
[Obrázek převzat z literatury č.3]

UKÁZKY KOGNITIVNÍCH ROBOTŮ

Plánování chůze

Literatura :
[1] Schmid D. a kol.: Řízení a regulace pro strojírenství a mechatroniku. Europa Sobotáles.Praha, 2005.
[2] Talácko J., Matička R.: Konstrukce průmyslových robotů a manipulátorů. ČVUT. 1995.
[3] Trinkl A.: Robotizované třídění strojních součástí s využitím kamerového systému na školním robotizovaném pracovišti Turbo Scara SR60. Dipl. práce. ČZU TF. Praha, 2005.
[4] Ďaďo S., Kreidl M.: Senzory a měřicí obvody. ČVUT, 1999.
[5] WWW.KEYENCE.COM