Embed Size (px)
DESCRIPTION
An important research activity has been devoted to synchronize two or more caotic systems. Aim of this project is to compare and explain various kind of strategies used for do that, from "Pecora and Carroll" to Impulsive method and so forth.
Citation preview

Università degli studi di Catania
Facoltà di Ingegneria
Tesina del corso
Sistemi Complessi e Adattativi
Applicare gli schemi di sincronizzazionenoti al circuito di Chua
Professore Studente
Prof. Luigi Fortuna Marano Barbaro
Anno Accademico 2007/2008


Indice
1 Introduzione 5
1.1 Sistemi Complessi . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Sistemi Caotici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Il circuito di Chua . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Metodi per quantificare il Caos 13
2.0.1 Gli esponenti di Lyapunov . . . . . . . . . . . . . . . . . . 13
2.0.2 Esponente di Lyapunov in una mappa discreta . . . . . . 14
2.0.3 Esponenti di Lyapunov per Sistemi dinamici Continui. . . 15
2.0.4 Algoritmo con ortonormalizzazione di Gram-Schmidt . . . 17
2.0.5 Divergenza tra due traiettorie . . . . . . . . . . . . . . . . 18
2.0.6 La dimensione frattale . . . . . . . . . . . . . . . . . . . . 19
3 Sincronizzazione di sistemi caotici 21
3.1 Concetto di sincronizzazione . . . . . . . . . . . . . . . . . . . . . 21
3.2 Sincronizzazione Pecora & Carroll. . . . . . . . . . . . . . . . . . 24
3.2.1 Decomposizione x-driver . . . . . . . . . . . . . . . . . . . 25
3.2.2 Decomposizione y-driver . . . . . . . . . . . . . . . . . . . 26
3.2.3 Decomposizione z-driver . . . . . . . . . . . . . . . . . . . 30
3.3 Sincronizzazione per accoppiamento . . . . . . . . . . . . . . . . 30
3.3.1 Accoppiamento mutuo tra due sistemi. . . . . . . . . . . . 30
3.3.2 Robustezza della sincronizzazione tra due circuiti mutua-mente accoppiati . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.3 Accoppiamento unidirezionale tra due sistemi. . . . . . . . 35
3.4 Sincronizzazione impulsiva . . . . . . . . . . . . . . . . . . . . . . 39
3.4.1 Sincronizzazione impulsiva al variare della frequenza . . . 42
3.4.2 Sincronizzazione impulsiva variando il Duty - Cycle . . . 42
3.5 Sincronizzazione da Controllo Lineare . . . . . . . . . . . . . . . 43
3.6 Sincronizzazione da Controllo Adattativo . . . . . . . . . . . . . . 46
3

3.7 Effetti benefici del rumore . . . . . . . . . . . . . . . . . . . . . . 49
Bibliografia 51
Elenco delle Figure 54
Elenco delle Tabelle 57
Capitolo 1
Introduzione
1.1 Sistemi Complessi
Il termine Sistema Complesso, si riferisce a parti di sistemi accoppiati in manie-ra non lineare, fino a formare una rete. Dalla cooperazione tra singoli elementidi questi sistemi, e grazie alla dinamica nonlineare, Emerge un comportamentocomplessivo che non è la semplice somma dei comportamenti individuali, mache presenta delle caratteristiche molto interessanti. Dal post-illuminismo finoa qualche anno fa, l’approccio utilizzato allo studio di un problema era caratte-rizzato dalla suddivisione dello stesso in piccole sottoparti e dalla comprensionedelle stesse. Questo metodo permetteva di risalire al comportamento del si-stema complessivo, dalla sovrapposizione delle dinamiche dei sottosistemi. Giàdall’avvento della Meccanica quantistica però, si capì che lo studio di un sistemareale naturale, non poteva essere sempre effettuato focalizzando gli aspetti mi-croscopici, per poi risalire agli effetti Macroscopici. Con l’avvento dello studiodei Sistemi Complessi, le dinamiche degli oggetti in esame furono per la pri-ma volta assimilate come Caratteristica Emergente del sistema, nella sua totaleintegrità.
1.2 Sistemi Caotici
Molte volte si indica con il termine Sistemi Complessi, quelli che sono i SistemiCaotici. Comunque questo non è corretto, infatti un sistema caotico, in con-trasto con i sistemi complessi, deve avere delle proprie caratteristiche che moltevolte è difficile verificare. La parola Caos, è stata introdotta per la prima voltada Yorke nel 1975 [3], molti anni dopo la prima pubblicazione di Lorenz [4].Sebbene il modello di Lorenz è considerato uno dei primi modelli caotici, questotipo di comportamento fu incontrato dal Poincarè nel 1887. In quel periodo il
5

6 CAPITOLO 1. INTRODUZIONE
re di Svezia organizzò una competizione matematica con lo scopo di verificarela stabilità del sistema solare, una variazione del problema a tre corpi. Poincarèdimostrò che l’evoluzione di questi sistemi è spesso caotica, nel senso che unapiccola perturbazione nelle posizioni iniziali dei corpi, portava ad una grandevariazione negli stati successivi. Comunque, fu Lorenz (1917-2008), che per laprima volta focalizza a fondo il problema della sensibilità alle condizioni iniziali,a tal punto che nel 1972, dopo una relazione accademica discute del fatto che unbattito di ali di una farfalla può condizionare, a seguito di dinamiche caotichema idealmente prevedibili (Flusso aperiodico deterministico [4]), un uragano amolti chilometri di distanza. E’ stato dimostrato da Poincarè e Bendixon [6],che per sistemi dinamici tempo continuo autonomi, affinchè si possa generare uncomportamento caotico, il modello deve essere di ordine superiore a tre. Men-tre per sistemi non autonomi continui, è possibile ottenere dinamiche caoticheanche con modelli del secondo ordine. Nei sistemi discreti invece, già con unmodello del primo ordine che presenta una nonlinearità si può ottenere il caose un esempio è la nota mappa logistica (R.May 1976).
1.3 Il circuito di Chua
Era l’autunno del 1983, quando Leon Chua, professore ordinario nel “Diparti-mento di Ingegneria Elettrica e delle Scienze Informatiche” nell’Università dellaCalifornia, diede vita al famoso circuito che porta il suo nome. Successivamente,il professore propose a T.Matsumoto, un suo assistente, di studiarne a fondo lecaratteristiche. Quest’ultimo dopo aver effettuato delle simulazioni al calcola-tore ne verificò l’esistenza di un comportamento caotico. Il problema pratico,a questo punto, era progettare la nonlinearità richiesta affinchè il circuito po-tesse essere realizzato. É proprio con un telefono dell’ospedale di Tokyo cheL.Chua suggerisce a K.Matsumoto di modificare il circuito di Rosenthal affin-chè presentasse le caratteristiche richieste. In questo modo si potè realizzare lanonlinearità a tratti richiesta mediante l’uso di due soli transistor. Solo nell’a-gosto 1985, dopo la pubblicazione di K.Matsumoto e L.Chua [14] la comunitàscientifica é al corrente dell’esistenza di un circuito che, data la sua semplicitàprogettuale e la sua robustezza, diventerà il paradigma del Caos.Un contributo sostanziale alla già tremenda diffusione del circuito, è stata datada M.P.Kennedy nel 1992 [13], il quale implementò il cosidetto Diodo di Chuamediante l’utilizzo di due amplificatori operazionali e sei resistori. In questomodo il circuito di Chua poteva essere realizzato in qualunque laboratorio conun costo inferiore ai 30 dollari.La pregevolezza del circuito però non risiede solo nella robustezza e nella facili-tà realizzativa, ma stà pure nel fatto che al variare dei parametri contenuti nel

1.3. IL CIRCUITO DI CHUA 7
modello, si osservano una molteplicità di comportamenti, passando dal compor-tamento caotico alla presenza di cicli limite fino ad arrivare ai punti di equilibriostabili. Il circuito di Chua è raffigurato in figura (1.1): il resistore alla destraè il componente che presenta la non linearita raffigurata in (1.2). Scrivendole equazioni di Kirchhoff ai nodi si ottengono tre equazioni differenziali che nedescrivono il comportamento nel tempo:
C1∂vC1
∂t=vC2 − vC1
R− g(vC1)
C2∂vC2
∂t=vC1 − vC2
R+ iL
L∂iL∂t
= −vC2 − iLRp
dove vC1 , vC2 e iL, rappresentano la tensione sul condensatore C1, la tensionesul condensatore C2 e la corrente sull’induttore L, rispettivamente, g(vC1) è lanonlinearità raffigurata in (1.2):
g(vC1) = GbvC1 +12
(Ga −Gb)[|vC1 + E| − |vC1 − E|]
Per una più comoda trattazione numerica, tramite un cambio di variabili èpossibile ottenere il modello adimensionale:
∂x
∂τ= kα(x− y + f(x))
∂y
∂τ= k(x− y + z)
∂z
∂τ= k(−βy − γz)
f(x) = bx+12
(a− b)|x+ 1| − |x− 1|
dove:x = v1
E α = C2C1
a = RGa
y = v2E β = R2C2
L b = RGb
z = i3RE γ = RRpC2
L τ = t|RC2|
k =
{1 if RC2 > 0;−1 if RC2 < 0.
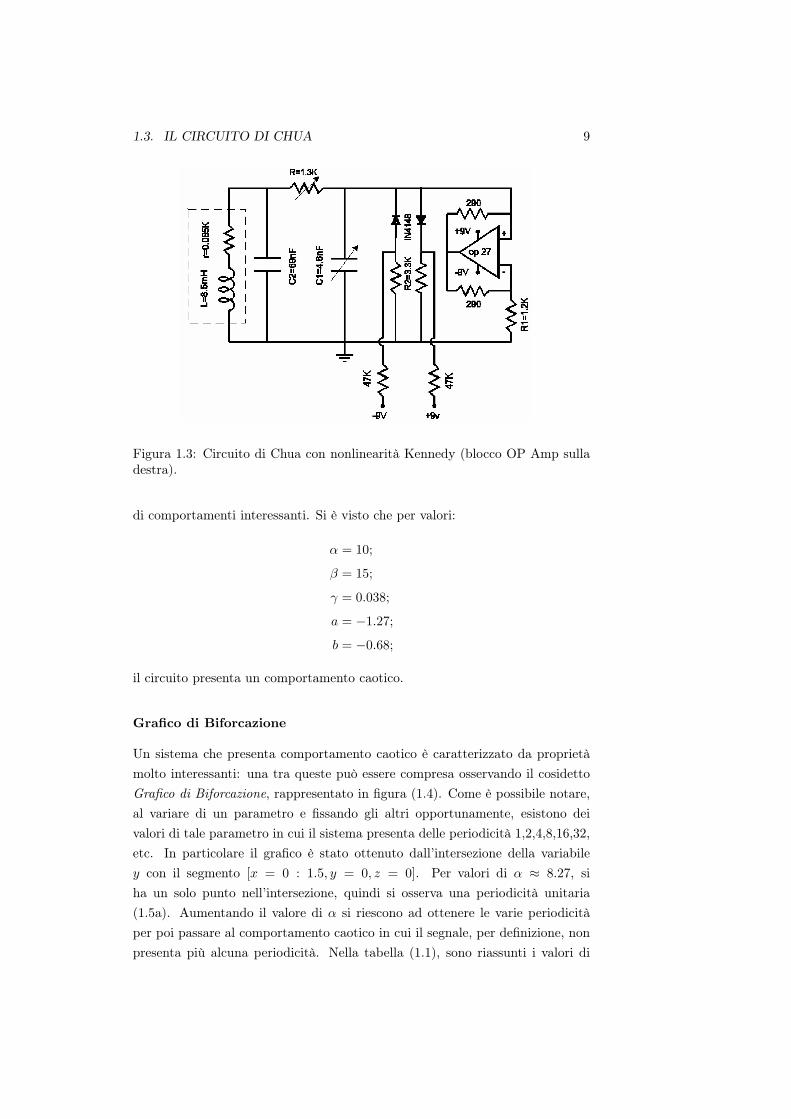
Nella pratica però vista la robustezza e la semplicità realizzativa, il dio-do di Chua, viene implementato con il circuito di Kennedy. La figura (1.3)rappresenta il circuito completo utilizzato sovente nei laboratori. Come dettoprecedentemente, al variare dei parametri α, β e γ, si ottengono una molteplicità

8 CAPITOLO 1. INTRODUZIONE
Figura 1.1: Circuito di Chua
Figura 1.2: Nonlinearità presente nel modello.
1.3. IL CIRCUITO DI CHUA 9
3
resistance of size –R1, and the diodes provide nonlinearity.4 The left side of the circuit acts as an
RLC circuit, which would simply produce damped oscillations without the right-hand side.
Figure 1: Cross’s Version of Chua’s Circuit5
To derive the three differential equations for the system, we choose three variables that
change over time: V1, the voltage across capacitor C1; V2, the voltage across capacitor C2; and
I, the current through the inductor. We apply Kirchhoff’s first law—which states that the current
entering a node equals the current leaving a node—to the nodes above C1 and C2 in the diagram.
Next we apply Kirchhoff’s second law—which states that the sum of the voltage around a loop
equals zero—to the loop containing the inductor and C2. Thus, Kirchhoff’s laws give the
following equations for the circuit:
C1(dV1/dt) = (V2-V1)/R – g(V1)
C2(dV2/dt) = -(V2-V1)/R + I
L(dI/dt) = -rI – V2
4 Cross. http://www.cmp.caltech.edu/~mcc/chaos_new/Chua_docs/works.html. 5 This diagram comes from Cross’s website. http://www.cmp.caltech.edu/~mcc/chaos_new/Chua.html.
Figura 1.3: Circuito di Chua con nonlinearità Kennedy (blocco OP Amp sulladestra).
di comportamenti interessanti. Si è visto che per valori:
α = 10;
β = 15;
γ = 0.038;
a = −1.27;
b = −0.68;
il circuito presenta un comportamento caotico.
Grafico di Biforcazione
Un sistema che presenta comportamento caotico è caratterizzato da proprietàmolto interessanti: una tra queste può essere compresa osservando il cosidettoGrafico di Biforcazione, rappresentato in figura (1.4). Come è possibile notare,al variare di un parametro e fissando gli altri opportunamente, esistono deivalori di tale parametro in cui il sistema presenta delle periodicità 1,2,4,8,16,32,etc. In particolare il grafico è stato ottenuto dall’intersezione della variabiley con il segmento [x = 0 : 1.5, y = 0, z = 0]. Per valori di α ≈ 8.27, siha un solo punto nell’intersezione, quindi si osserva una periodicità unitaria(1.5a). Aumentando il valore di α si riescono ad ottenere le varie periodicitàper poi passare al comportamento caotico in cui il segnale, per definizione, nonpresenta più alcuna periodicità. Nella tabella (1.1), sono riassunti i valori di

10 CAPITOLO 1. INTRODUZIONE
Figura 1.4: Grafico di biforcazione per il circuito di Chua, in cui alfa varia da8.8 a 9.25 e beta e fissato a 16.
Periodicità Alfa no. Feigenbaum1 8.279202 8.879204 9.105028 9.15900 4.183416 9.16990 4.9523
Tabella 1.1: Valori di α per cui si osserva periodicità.
α caratteristici per cui si osservano le suddette periodicità, mentre nelle figure(1.5a-e) sono rappresentati i vari cicli limite che si ottengono. Nella terza colonnaè rappresentato il cosidetto Numero di Feigenbaum. Questo numero è statoscoperto da Mitchell Feigenbaum nel 1975 e rappresenta una costante universaleritrovata in molti sistemi che presentano comportamenti caotici. In particolareesso è dato dal rapporto tra le differenze dei valori di α che determinano le varieperiodicità e viene espresso dalla seguente:
δi = (αi−1 − αi−2)/(αi − αi−1)
In particolare si trova che questi numeri trovati sono uguali e asintoticamentetendono a 4.66901.

1.3. IL CIRCUITO DI CHUA 11
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4Periodicità = 1, α = 8.2792, (1/5)
(a) Periodicità 1, α = 8.27920
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4Periodicità = 2, α = 8.8792, (2/5)
(b) Periodicità 2, α = 8.87920
0 0.5 1 1.5 2 2.5-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4Periodicità = 4, α = 9.105, (3/5)
(c) Periodicità 4, α = 9.10502
0 0.5 1 1.5 2 2.5-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4Periodicità = 8, α = 9.159, (4/5)
(d) Periodicità 8, α = 9.15900
-0.5 0 0.5 1 1.5 2 2.5-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4Periodicità = 16, α = 9.1699, (5/5)
(e) Periodicità 16, α = 9.16990
Figura 1.5: Traiettorie nello spazio delle fasi di x e y per vari valori di α.

12 CAPITOLO 1. INTRODUZIONE

Capitolo 2
Metodi per quantificare ilCaos
2.0.1 Gli esponenti di Lyapunov
Negli anni passati, approcci differenti sono stati applicati allo studio dei siste-mi dinamici. Guckenheimer e Holmes nel 1983, svilupparono una teoria che sibasava su concetti geometrici mentre, Eckmann e Ruelle nel 1985 hanno ca-ratterizzato il comportamento dei sistemi dinamici con un approccio statistico.Quest’ultimo approccio, basato sulla teoria ergodica, cerca di caratterizzare ilcomportamento di un sistema dinamico mediante concetti come la dimensione,l’entropia, e gli esponenti di Lyapunov caratteristici. La dimensione indica ilnumero di gradi di libertà eccitati dal sistema e il grado di complessità dell’at-trattore, mentre l’entropia di Kolmogorov-Sinai indica il grado di produzione di
Figura 2.1: Propagazione di una perturbazione iniziale e esponenti di Lyapunov.
13

14 CAPITOLO 2. METODI PER QUANTIFICARE IL CAOS
informazione nel sistema nell’unità di tempo ed è definita come:∑λi>0
λi (2.1)
Dove i λi sono gli esponenti di Lyapunov positivi trattati nel proseguio.Gli esponenti di Lyapunov giocano un ruolo essenziale nella descrizione del com-portamento di un sistema dinamico, infatti, essi misurano il tasso medio diver-genza o di convergenza di traiettorie a partire da condizioni iniziali molto vicinetra loro. La trattazione analitica che permette di ricavare le espressioni degliesponenti di Lyapunov per un sistema, verrà esposta con due approcci differenti.Il primo metodo, molto intuitivo, verrà applicato a una mappa discreta unidi-mensionale, e servirà a comprendere meglio i risultati ottenuti nel secondo caso.Il secondo approccio è più rigoroso e verrà esposto nel caso di sistemi continui.
2.0.2 Esponente di Lyapunov in una mappa discreta
Consideriamo la seguente mappa discreta:
xn+1 = f(xn) (2.2)
Chiamiamo x(0) una condizione iniziale perturbata rispetto alla condizione ini-ziale x(0), e definiamo ε(n) = x(n)−x(n), l’errore tra le due traiettorie generatedalle due diverse condizioni iniziali, all’istante n. Assumendo che ε(0) sia piccolo,si ha:
ε(0) = x(0)− x(0)
ε(1) = x(1)− x(1) = f(x0)− f(x0) =∂f
∂x
∣∣∣∣n=0
· ε(0) + o(ε0)
ε(2) = x(2)− x(2) = f(x1)− f(x1) =∂f
∂x
∣∣∣∣n=1
· ε(1) =∂f
∂x
∣∣∣∣n=1
· ∂f∂x
∣∣∣∣n=0
· ε0
· · ·
ε(k) = x(k)− x(k) = f(xk−1)− f(xk−1) = f ′(xk−1) · f ′(xk−2) · · · f ′(x0) · ε0(2.3)
Dove nella seconda equazione sono stati trascurati i termini o(ε0), ovvero itermini di ordini superiori. Facendo il rapporto |εk/ε0|, se questo è maggiore,uguale o minore dell’unità, possiamo sapere se l’errore tra le due traiettorie èaumentato, rimasto invariato o diminuito, rispetto all’istante iniziale. Possiamo

15
esprimere questo rapporto come:∣∣∣∣εkε0∣∣∣∣ =
∣∣∣∣ εkεk−1
∣∣∣∣ · ∣∣∣∣εk−1
εk−2
∣∣∣∣ · · · ∣∣∣∣ε1ε0∣∣∣∣ = |f ′(xk−1)| · |f ′(xk−2)| · · · |f ′(x0)| (2.4)
Passando ai logaritmi si ha:
ln∣∣∣∣εkε0∣∣∣∣ = ln
∣∣∣∣ εkεk−1
∣∣∣∣+ ln∣∣∣∣εk−1
εk−2
∣∣∣∣+ ln∣∣∣∣ε1ε0∣∣∣∣ (2.5)
Poichè siamo interessati a stimare il tasso medio di divergenza delle traiettorie,dividiamo per k, ottenendo:
1k
ln∣∣∣∣εkε0∣∣∣∣ =
1k
k∑i=1
ln
∣∣∣∣ εiεi−1
∣∣∣∣ (2.6)
Passando al limite per k che tende ad infinito, otteniamo l’esponente di Lyapu-nov cercato:
λ(ε0) = limk→∞
1k
ln∣∣∣∣εkε0∣∣∣∣ = lim
k→∞
1k
k∑i=1
ln
∣∣∣∣ εiεi−1
∣∣∣∣ = limk→∞
1k
k∑i=1
ln|f ′(xk−1)| (2.7)
Questo limite esiste per quasi tutte le condizioni iniziali x0 (ovvero per tutto lospazio di stato, tranne per insiemi di misura nulla), come dimostrato nel Teo-rema Moltiplicativo Ergodico di Oseledec [5]. Ed inoltre λ non dipendedalle condizioni iniziali se il sistema è ergodico. Dal secondo membro della (2.7),è possibile notare che, l’errore all’istante k e dato dalla seguente espressione:
|εk| = eλ(x0)k|ε0| (2.8)
2.0.3 Esponenti di Lyapunov per Sistemi dinamici Conti-nui.
Cosideriamo il seguente sistema dinamico continuo n-dimensionale:
∂x
∂t= f(x(t)) (2.9)
facendo riferimento alla notazione precedente, una perturbazione ε(0) sulle con-dizioni iniziali, evolverà nel tempo seguendo la dinamica descritta dalla seguente:
∂ε
∂t= K(x) · ε(t) (2.10)
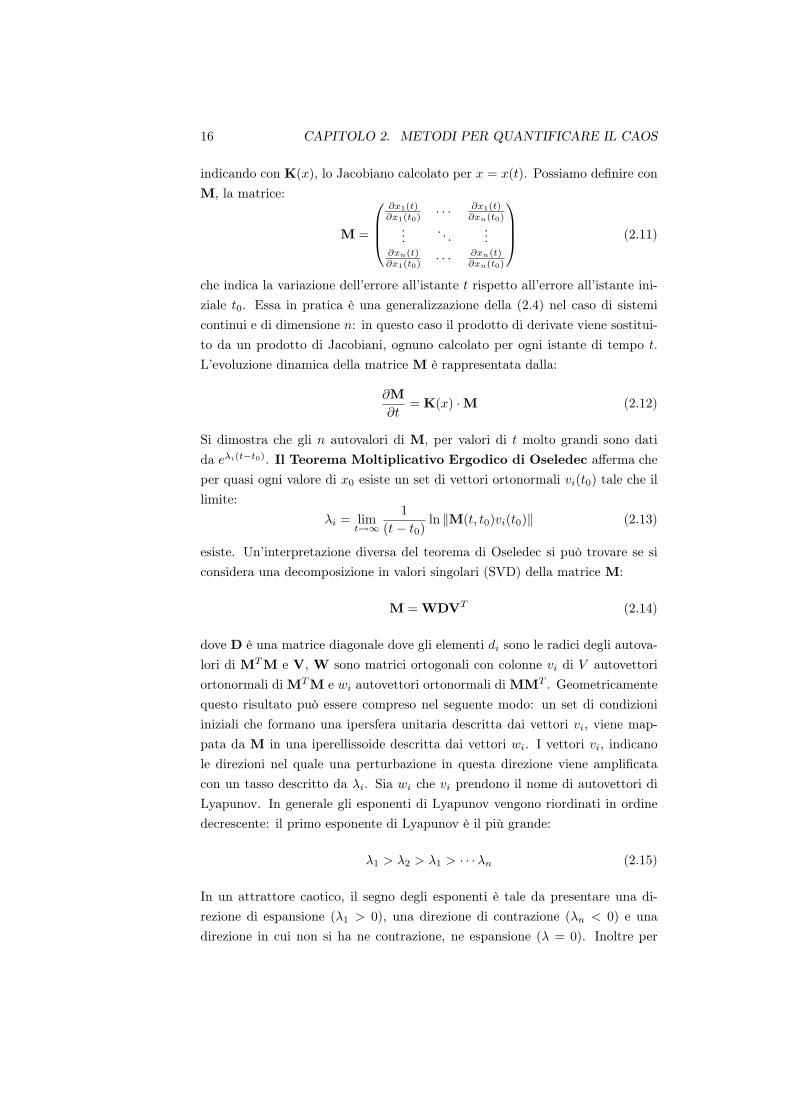
16 CAPITOLO 2. METODI PER QUANTIFICARE IL CAOS
indicando con K(x), lo Jacobiano calcolato per x = x(t). Possiamo definire conM, la matrice:
M =
∂x1(t)∂x1(t0)
· · · ∂x1(t)∂xn(t0)
.... . .
...∂xn(t)∂x1(t0)
· · · ∂xn(t)∂xn(t0)
(2.11)
che indica la variazione dell’errore all’istante t rispetto all’errore all’istante ini-ziale t0. Essa in pratica è una generalizzazione della (2.4) nel caso di sistemicontinui e di dimensione n: in questo caso il prodotto di derivate viene sostitui-to da un prodotto di Jacobiani, ognuno calcolato per ogni istante di tempo t.L’evoluzione dinamica della matrice M è rappresentata dalla:
∂M∂t
= K(x) ·M (2.12)
Si dimostra che gli n autovalori di M, per valori di t molto grandi sono datida eλi(t−t0). Il Teorema Moltiplicativo Ergodico di Oseledec afferma cheper quasi ogni valore di x0 esiste un set di vettori ortonormali vi(t0) tale che illimite:
λi = limt→∞
1(t− t0)
ln ‖M(t, t0)vi(t0)‖ (2.13)
esiste. Un’interpretazione diversa del teorema di Oseledec si può trovare se siconsidera una decomposizione in valori singolari (SVD) della matrice M:
M = WDVT (2.14)
dove D è una matrice diagonale dove gli elementi di sono le radici degli autova-lori di MTM e V, W sono matrici ortogonali con colonne vi di V autovettoriortonormali di MTM e wi autovettori ortonormali di MMT . Geometricamentequesto risultato può essere compreso nel seguente modo: un set di condizioniiniziali che formano una ipersfera unitaria descritta dai vettori vi, viene map-pata da M in una iperellissoide descritta dai vettori wi. I vettori vi, indicanole direzioni nel quale una perturbazione in questa direzione viene amplificatacon un tasso descritto da λi. Sia wi che vi prendono il nome di autovettori diLyapunov. In generale gli esponenti di Lyapunov vengono riordinati in ordinedecrescente: il primo esponente di Lyapunov è il più grande:
λ1 > λ2 > λ1 > · · ·λn (2.15)
In un attrattore caotico, il segno degli esponenti è tale da presentare una di-rezione di espansione (λ1 > 0), una direzione di contrazione (λn < 0) e unadirezione in cui non si ha ne contrazione, ne espansione (λ = 0). Inoltre per

17
sistemi dissipativi la somma di tutti gli esponenti di Lyapunov deve essere ne-gativa. L’applicazione diretta della formula (2.13), è numericamente instabile.Infatti, se il sistema ha una direzione di espansione e una di contrazione, allorail massimo esponente di Lyapunov λ1(x0), può essere molto più grande dell’ul-timo λn(x0). La precisione finita del calcolatore induce a un errore trascurabileper il calcolo del primo esponente ma non lo è per gli altri. Per evitare questoproblema una tecnica molto utilizzata e l’utilizzo di una reortonormalizzazioneperiodica dei vettori che indicano le direzioni di espansione/contrazione. Di se-guito viene spiegato questo algoritmo che è stato utilizzato anche per il calcolodegli esponenti di Lyapunov per tutte le simulazioni effettuate.
2.0.4 Algoritmo con ortonormalizzazione di Gram-Schmidt
Figura 2.2: (In alto) Data una sfera unitaria di condizioni iniziali, dopo uncerto periodo di tempo viene mappata dalla matrice M in un ellissoide comedal teorema di Oseledec. (In basso) Procedura di ortonormalizzazione di Gram-Schmidt. Si nota che le aree prima e dopo l’ortonormalizzazione sono uguali.
Consideriamo un sistema continuo n-dimensionale. L’algoritmo utilizzatonella pratica per il calcolo degli esponenti di Lyapunov è il seguente.
1. Si assegnano n vettori ortonormali, e si pone k=0:
ek1 = (1, 0, . . . , 0)
ek2 = (0, 1, . . . , 0)
ekn = (0, 0, . . . , 0)
(2.16)
Questi vettori indicano n diverse perturbazioni delle condizioni inizialinelle n direzioni.

18 CAPITOLO 2. METODI PER QUANTIFICARE IL CAOS
2. Per ogni vettore eki , si integra la traiettoria della equazione variazionale(2.10) per un tempo T arbitrariamente piccolo da non indurre troppi er-rori numerici nella divergenza della massima direzione di espansione. Siottengono così n vettori di errore vki = εi(T ) con (i=1,. . . n).
3. Si re-ortonormalizzano tali vettori ottenuti mediante il metodo di Gram-Schmidt, ottenendo una nuova base ortonormale εk+1
i [20]:
ek+11 =
vk1∥∥vk1∥∥ek+12 =
vk2 − (vk2 · ek+11 )ek+1
1∥∥vk2 − (vk2 · ek+11 )ek+1
1
∥∥ek+1n =
vkn − (vkn · ek+11 )ek+1
1 − · · · − (vkn · ek+1n−1)ek+1
n−1∥∥vkn − (vkn · ek+11 )ek+1
1 − · · · − (vkn · ek+1n−1)ek+1
n−1
∥∥(2.17)
I denominatori degli n vettori indicano i tassi di espansione/contrazionenelle n direzioni ortogonali della nuova base e vengono indicati con Nk
i .
4. Si ritorna al passo k e si ripete il processo per r volte. Gli esponenti diLyapunov saranno dati da:
λi = limr→∞
∑rk lnNk
i
rT(2.18)
2.0.5 Divergenza tra due traiettorie
Consideriamo un sistema n-dimensionale continuo. Chiamiamo x(0) una condi-zione iniziale perturbata rispetto a x(0). Si trova che in un attrattore caotico,le due traiettorie generate divergono molto rapidamente nel tempo. Essendoperò l’attrattore limitato si ha un continuo alternarsi di due moti differenti: cisaranno delle direzioni caratterizzate da uno stretching delle traiettorie e delledirezioni caratterizzate dal folding che tende a mantenere bounded l’attrattore.Se definiamo ||δ(t)|| = ||x(t) − x(t)||, si trova che l’andamento nel tempo delladivergenza è approssimativamente uguale a:
||δ(t)|| = ||δ(0)||eλ1t (2.19)
Questo risultato è di utilità pratica notevole perchè permette, mediante ungrafico della distanza euclidea, di avere informazioni riguardo al primo esponentedi Lyapunov, essendo:
λ1 ≈1t
ln||δ(t)||||δ(0)||
t (2.20)

19
Quindi dalla pendenza di questo grafico si ottiene il valore approssimato dell’e-sponente cercato.
0 10 20 30 40 50 60 70 80 90 1000
2
4
6
8
10
12lo
g(δ
(t)
)
tempo
λ1
Figura 2.3: Metodo pratico per il calcolo del primo esponente di Lyapunov.
2.0.6 La dimensione frattalePerchè la geometria viene spesso indicata come arida e fredda?Una ragione è l’inabilità di descrivere la forma di una nuvola odi una montagna, una linea costiera o un albero. Le nuvole nonsono delle sfere, le montagne non sono dei coni, le linee costierenon sono dei cerchi, il sughero non è liscio e i fulmini non simuovono lungo linee dritte.
Benoît B. Mandelbrot
Così Mandelbrot nel suo libro “The Fractal Geometry of Nature”, descrive l’ina-deguatezza della geometria euclidea, nella descrizione della Natura. Mandelbrot
Figura 2.4: Insieme di Mandelbrot (1979)

20 CAPITOLO 2. METODI PER QUANTIFICARE IL CAOS
è il padre fondatore della teoria dei frattali e l’inventore del famoso insieme cheporta il suo nome Figura (2.4). Poichè gli strange attractors hanno delle carat-teristiche frattali, ad esse è associata una dimensione legata agli esponenti diLyapunov e che assieme ad essi permette di distinguere una traiettoria caoticarispetto ad un ciclo limite o a un punto di equilibrio stabile. In particolare sidimostra che:
• in un attrattore caotico suddetta dimensione è compresa tra 2 e 3;
• in un ciclo limite è circa unitaria;
• un punto di equilibrio stabile è nulla.
Il metodo per calcolare suddetta dimensione frattale, è dovuto alla congetturasviluppata da Kaplan-Yorke:
d = j +
∑λj>0 λj
|λj+1|(2.21)
dove, j indica l’interno più grande tale che la somma dei primi esponenti diLyapunov sia positiva .

Capitolo 3
Sincronizzazione di sistemicaotici
3.1 Concetto di sincronizzazione
La sincronizzazione di oscillazioni tra due diversi sistemi è un fenomeno non li-neare che spesso si incontra in natura. La capacità di molti oscillatori non linearidi sincronizzarsi l’un con l’altro è alla base del funzionamento di molti proces-si naturali, quindi la sincronizzazione ha un ruolo fondamentale nelle scienze.Numerose applicazioni di sincronizzazione in meccanica, elettronica, comunica-zioni, misure e in altri campi hanno dimostrato che la profonda conoscenza delfenomeno della sincronizzazione è di estrema importanza in ingegneria.Uno dei primi esperimenti in cui venne studiata la sincronizzazione naturale tradue sistemi fu effettuato da Huygens nel 1665. Durante una banale gita in maresi accorse che, collegando due orologi a pendolo su uno stesso supporto e ac-coppiandoli in maniera tale da presentarsi una debole interazione tra di loro, leoscillazioni diventavano identiche a differenza di quando erano ubicati in postidiversi (fig. 3.1). In generale, comunque, la sincronizzazione è intesa come lacapacità da parte di oscillatori autonomi accoppiati e con frequenze diverse, dicambiare il loro comportamento, da un regime di oscillazione indipendente a unregime di oscillazione periodica stabile, man mano che il coefficiente di accop-piamento diventa più grande. Come facilmente intuibile, si riesce ad ottenereuna sincronizzazione solo quando la differenza tra le diverse frequenze è bassa.A dimostrazione di questo fatto, se indichiamo ∆f = f1− f2 come la differenzatra le frequenze degli oscillatori interagenti, ∆F = F1 − F2 la differenza dellefrequenze negli oscillatori non interagenti ed ε come il grado di interazione, siottiene un grafico tipico che prende il nome di Lingua di Arnold. In generale
21

22 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
2 Introduction
bottom of the case was added a lead weight of over one hundred pounds so thatthe instrument would better maintain a perpendicular orientation whensuspended in the ship.
Although the motion of the clock was found to be very equal and constant inthese experiments, nevertheless we made an effort to perfect it still further inanother way as follows. . . . the result is still greater equality of clocks thanbefore.
Furthermore, Huygens shortly, but extremely precisely, described his observationof synchronization as follows.
. . . It is quite worth noting that when we suspended two clocks so constructedfrom two hooks imbedded in the same wooden beam, the motions of each
Figure 1.1. Christiaan Huygens (1629–1695), the famous Dutch mathematician,astronomer and physicist. Among his main achievements are the discovery of the firstmoon and the true shape of the rings of Saturn; the first printed work on the calculusof probabilities; the investigation of properties of curves; the formulation of a wavetheory of light including what is well-known nowadays as the Huygens principle. In1656 Christiaan Huygens patented the first pendulum clock, which greatly increasedthe accuracy of time measurement and helped him to tackle the longitude problem.During a sea trial, he observed synchronization of two such clocks (see also theintroduction to the English translation of his book [Huygens 1673] for a historicalsurvey). Photo credit: Rijksmuseum voor de Geschidenis der Natuuringtenschappen,courtesy American Institute of Physics Emilio Segre Visual Archives.
(a) ChristiaanHuygens
1.1 Synchronization in historical perspective 3
pendulum in opposite swings were so much in agreement that they neverreceded the least bit from each other and the sound of each was always heardsimultaneously. Further, if this agreement was disturbed by some interference, itreestablished itself in a short time. For a long time I was amazed at thisunexpected result, but after a careful examination finally found that the cause ofthis is due to the motion of the beam, even though this is hardly perceptible. Thecause is that the oscillations of the pendula, in proportion to their weight,communicate some motion to the clocks. This motion, impressed onto the beam,necessarily has the effect of making the pendula come to a state of exactlycontrary swings if it happened that they moved otherwise at first, and from thisfinally the motion of the beam completely ceases. But this cause is notsufficiently powerful unless the opposite motions of the clocks are exactly equaland uniform.
The first mention of this discovery can be found in Huygens’ letter to his fatherof 26 February 1665, reprinted in a collection of papers [Huygens 1967a] and repro-duced in Appendix A1. According to this letter, the observation of synchronizationwas made while Huygens was sick and stayed in bed for a couple of days watchingtwo clocks hanging on a wall (Fig. 1.2). Interestingly, in describing the discoveredphenomenon, Huygens wrote about “sympathy of two clocks” (le phenomene de lasympathie, sympathie des horloges).
Thus, Huygens had given not only an exact description, but also a brilliant quali-tative explanation of this effect ofmutual synchronization; he correctly understoodthat the conformity of the rhythms of two clocks had been caused by an impercep-tible motion of the beam. In modern terminology this would mean that the clockswere synchronized in anti-phase due to coupling through the beam.
In the middle of the nineteenth century, in his famous treatise The Theory ofSound, William Strutt (Fig. 1.3) [Lord Rayleigh 1945] described the interestingphenomenon of synchronization in acoustical systems as follows.
When two organ-pipes of the same pitch stand side by side, complications ensuewhich not unfrequently give trouble in practice. In extreme cases the pipes may
Figure 1.2. Originaldrawing of ChristiaanHuygens illustrating hisexperiments with twopendulum clocks placed ona common support.
(b) Schizzo originale fatto da Huygens perrappresentare lo schema dei due pendoli chesi sincronizzano.
Figura 3.1: C.Huygens e l’esperimento dei pendoli.
Figura 3.2: Lingua di Arnold
però, gli oscillatori cambiano le loro frequenze in modo tale da:
• Renderle uguali tra di loro. In questo caso si parla di “Identical Synchro-nization” (IS);
• Essere in un rapporto fisso tra le due: Phase Synchronization (PS);
• Essere legate da una determinata funzione: Generalized Synchronization(GS).
Quanto detto fino ad ora è di facile comprensione se si considerano oscillatoriperiodici in cui è semplice la definizione di periodo, fase e frequenza. Se con-sideriamo invece il caso di oscillazione caotica, la definizione di fase può esseredifficile da applicare. Per ovviare a questa ambiguità che nasce nell’applicarela definizione di “fase” in questo tipo di circuiti (poichè le forme d’onda di un

3.1. CONCETTO DI SINCRONIZZAZIONE 23
segnale caotico è aperiodico), e considerando il fatto che la tipologia di sin-cronizzazione trattata in questo documento è la IS, si utilizza un altro tipo diapproccio nel determinare se due sistemi sono sincronizzati. Questo metodomolto semplice consiste nel graficare gli andamenti di due variabili di stato neltempo, nei due assi cartesiani: le figure che ne vengono fuori prendono il nome diFigure di Lissajous. Quando i due sistemi presentano una perfetta sincronizza-zione delle variabili di stato il grafico che ottenuto è una bisettrice. Il vantaggiodi questo metodo è che graficamente, ci si può rendere conto del grado di sin-cronizzazione tra due sistemi, tanto più la figura tende ad assomigliare ad unabisettrice. Analiticamente questo si esprime nel modo seguente. ConsideriamoN sistemi n-dimensionali diversi (N ≥ 2):
xi = fi(xi) i = 1, . . . N, xi ∈ R (3.1)
diremo che le traiettorie si sincronizzeranno asintoticamente se accade:
limt→∞
(xi − xj) = 0 i 6= j (3.2)
La sincronizzazione di due o più circuiti in regime caotico, può essere perseguitamediante tre diversi approcci.
• Il primo metodo, sviluppato da Pecora e Carroll nel 1990, permette diottenere una sincronizzazione tra due sistemi, in cui il secondo sistema(Slave), è una copia replicata esatta di una porzione del sistema Master.
• Il secondo, include dei sistemi accoppiati, in cui se il coefficiente di accop-piamento è nullo presentano entrambi un comportamento caotico. Manoa mano che il grado di accoppiamento cresce, i due circuiti tendono a sin-cronizzarsi. Il grado di accoppiamento può trovarsi su tutte le variabili distato, ma può anche essere tra una sola delle variabili di stato per produrresincronizzazione.
• Il terzo metodo, si basa principalmente sulle strategie classiche di controlloretroazionato.

24 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
3.2 Sincronizzazione Pecora & Carroll.
Synchronizing Chaotic Circuits
Thomas L.Carroll and Louis M.Pecora
Abstract - Although the motion of indipendent chaotic systemare uncorrelated with each other, it is possible under someconditions to synchronize a subsystem of one chaotic systemto the subsystem. We describe here the conditions necessaryfor synchronization and demonstrate synchronization with achaotic circuits.
Era il 19 febbraio 1990, quando Louis Pecora e Thomas Carroll aprivano, perla prima volta, le strade alla possibilità di sincronizzare due circuiti caotici. [1].Da quel momento in poi, studiosi di tutto il mondo hanno sviluppato tecnichedi sincronizzazione basandosi su questo metodo. In questo paragrafo vengonotrattati i concetti teorici più importanti che svilupparono i due autori per ri-cavare le condizioni necessarie affinchè si possa realizzare la sincronizzazione didue sistemi. Inoltre vengono affrontate delle simulazioni a dimostrazione dellavalidità della tecnica sviluppata.Si considera un sistema dinamico, autonomo n-dimensionale:
u = f(u) (3.3)
Dividiamo il sistema, arbitrariamente, in due sottosistemi [u=(v, w)]:
v = f(v) w = f(w) (3.4)
dove (v=u1,. . .,um), w=(um+1,. . .,un). Si avrà quindi:
g = (f1(u), . . . , fm(u)) (3.5)
h = (fm+1(u), . . . , fn(u)) (3.6)
Adesso creiamo un sottosistema w′ identico al sistema w, sostituendo alle va-riabili v′, le corrispondenti v nella funzione h. Con questo nuovo sottosistema,otteniamo:
Driver
v = g(v, w)
w = h(v, w)
3.2. SINCRONIZZAZIONE PECORA & CARROLL. 25
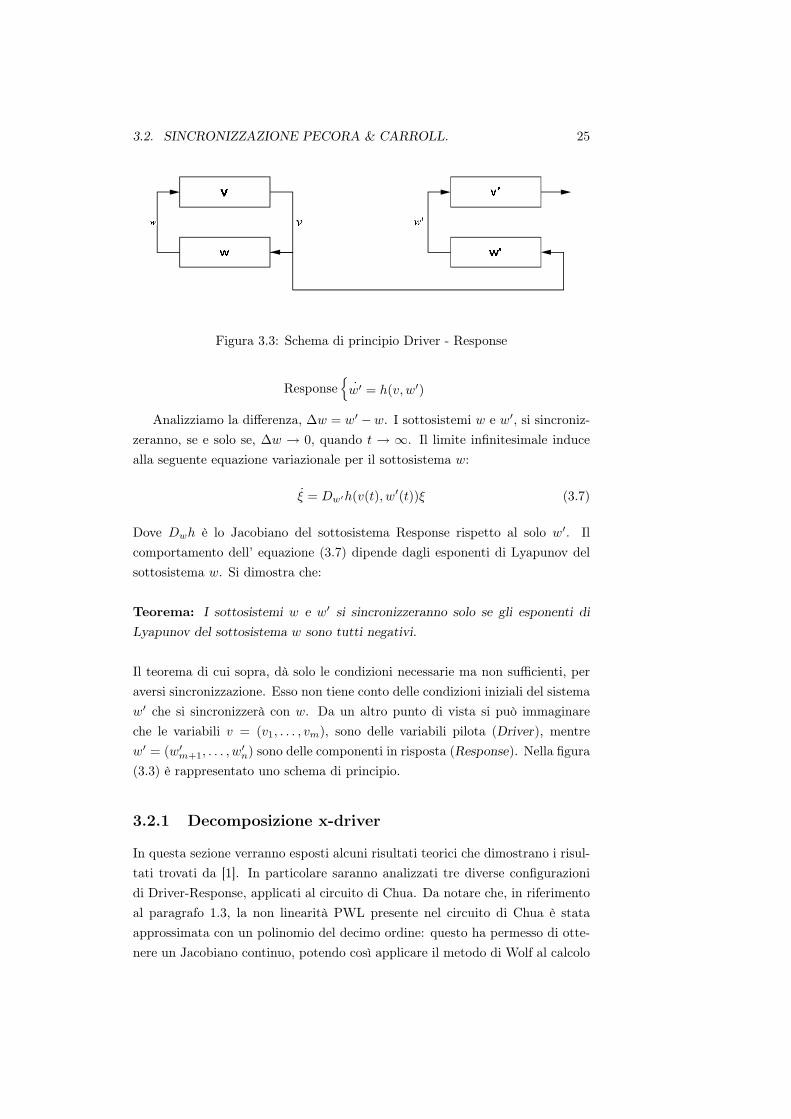
Figura 3.3: Schema di principio Driver - Response
Response{w′ = h(v, w′)
Analizziamo la differenza, ∆w = w′ −w. I sottosistemi w e w′, si sincroniz-zeranno, se e solo se, ∆w → 0, quando t → ∞. Il limite infinitesimale inducealla seguente equazione variazionale per il sottosistema w:
ξ = Dw′h(v(t), w′(t))ξ (3.7)
Dove Dwh è lo Jacobiano del sottosistema Response rispetto al solo w′. Ilcomportamento dell’ equazione (3.7) dipende dagli esponenti di Lyapunov delsottosistema w. Si dimostra che:
Teorema: I sottosistemi w e w′ si sincronizzeranno solo se gli esponenti diLyapunov del sottosistema w sono tutti negativi.
Il teorema di cui sopra, dà solo le condizioni necessarie ma non sufficienti, peraversi sincronizzazione. Esso non tiene conto delle condizioni iniziali del sistemaw′ che si sincronizzerà con w. Da un altro punto di vista si può immaginareche le variabili v = (v1, . . . , vm), sono delle variabili pilota (Driver), mentrew′ = (w′m+1, . . . , w
′n) sono delle componenti in risposta (Response). Nella figura
(3.3) è rappresentato uno schema di principio.
3.2.1 Decomposizione x-driver
In questa sezione verranno esposti alcuni risultati teorici che dimostrano i risul-tati trovati da [1]. In particolare saranno analizzati tre diverse configurazionidi Driver-Response, applicati al circuito di Chua. Da notare che, in riferimentoal paragrafo 1.3, la non linearità PWL presente nel circuito di Chua è stataapprossimata con un polinomio del decimo ordine: questo ha permesso di otte-nere un Jacobiano continuo, potendo così applicare il metodo di Wolf al calcolo

26 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
0 5 10 15 20 25-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4Variabile di stato y1 (Driver) e y2 (Response)
Tempo
y1,y
2
Figura 3.4: Andamento delle variabili di stato x1 e x2, nel tempo.
degli esponenti di Lyapunov. Nel corso di questo set di simulazioni il valore deiparametri erano α = 8, β = 12.2 e γ = 0.016. Come affermato dal Teorema dicui sopra, si prova che una condizione necessaria affinchè il sistema in rispostasi sincronizzi con circuito Driver, è che gli esponenti del sottosistema (Respon-se) siano tutti negativi (gli autori chiamano questi esponenti sub-esponenti).Durante questo set di simulazioni per il calcolo degli esponenti di Lyapunovsi è fatto uso del Metodo sviluppato da Wolf et. al. nel 1984 [2]. Prenden-do in considerazione le equazioni che descrivono il circuito di Chua, sono statianalizzati gli andamenti delle variabili di stato dei due sistemi, per le seguentidecomposizioni:
x1 = α(y1 − x1 − g1(x))
y1 = x1 − y1 + z1 y2 = x1 − y2 + z2
z1 = −βy1 − γz1 z2 = −βy2 − γz2
Da notare che in questo caso la variabile Driver proveniente dal sistema Masterè la x1. Facendo riferimento alla (3.2), si ha che v = (x1), w = (y1, z1) ew′ = (y2, z2). In questo caso, si nota che gli esponenti di Lyapunov del sottosistema sono entrambi negativi (Fig. 3.6), e le variabili di stato x1 e x2, sisincronizzano in tempo breve (Fig (3.4)).
3.2.2 Decomposizione y-driver
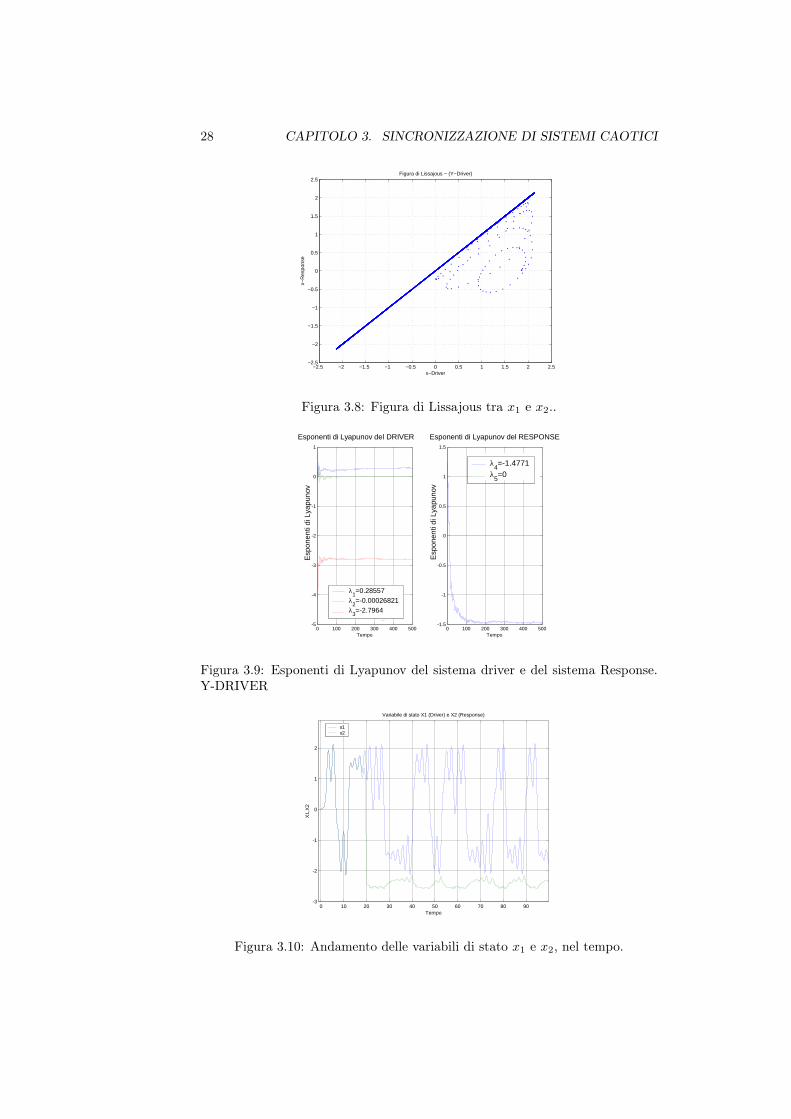
Successivamente sono state effettuate delle simulazioni in cui il segnale pro-veniente dal driver era la variabile y1. Anche in questo caso, essendo i sub-esponenti negativi (Figura 3.9), si ottiene una completa sincronizzazione tra i

3.2. SINCRONIZZAZIONE PECORA & CARROLL. 27
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4Figura di Lissajous − (X−Driver)
Y−Driver
Y−
Res
pons
e
Figura 3.5: Figura di Lissajous tra x1 e x2..
0 50 100 150 200-5
-4
-3
-2
-1
0
1
Tempo
Esp
on
en
ti d
i Lya
pu
no
v
Esponenti di Lyapunov del DRIVER
λ1=0.26663
λ2=0.0047713
λ3=-2.7965
0 50 100 150 200-4
-3
-2
-1
0
1
2
3
Tempo
Esp
onen
ti di L
yapun
ov
Esponenti di Lyapunov del RESPONSE: X-Driver
λ4=-0.49981
λ5=-0.50117
Figura 3.6: Esponenti di Lyapunov del sistema driver e del sistema Response.X-DRIVER
0 5 10 15 20 25-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Variabile di stato x1 (Driver) e x2 (Response)
Tempo
x1,x
2
Figura 3.7: Andamento delle variabili di stato x1 e x2, nel tempo.
28 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5Figura di Lissajous − (Y−Driver)
x−Driver
x−R
espo
nse
Figura 3.8: Figura di Lissajous tra x1 e x2..
0 100 200 300 400 500-5
-4
-3
-2
-1
0
1
Tempo
Esp
on
en
ti d
i Lya
pu
no
v
Esponenti di Lyapunov del DRIVER
λ1=0.28557
λ2=-0.00026821
λ3=-2.7964
0 100 200 300 400 500-1.5
-1
-0.5
0
0.5
1
1.5
Tempo
Esp
on
en
ti d
i Lya
pu
no
vEsponenti di Lyapunov del RESPONSE
λ4=-1.4771
λ5=0
Figura 3.9: Esponenti di Lyapunov del sistema driver e del sistema Response.Y-DRIVER
0 10 20 30 40 50 60 70 80 90-3
-2
-1
0
1
2
Variabile di stato X1 (Driver) e X2 (Response)
Tempo
X1,X
2
x1x2
Figura 3.10: Andamento delle variabili di stato x1 e x2, nel tempo.

3.2. SINCRONIZZAZIONE PECORA & CARROLL. 29
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4−5
−4
−3
−2
−1
0
1Figura di Lissajous − (Z−Driver)
x−Driver
x−R
espo
nse
Figura 3.11: Figura di Lissajous tra x1 e x2..
0 50 100 150 200-5
-4
-3
-2
-1
0
1
Tempo
Esp
on
en
ti d
i L
ya
pu
no
v
Esponenti di Lyapunov del DRIVER
λ1=0.31588
λ2=-0.0053173
λ3=-3.6031
0 50 100 150 200-6
-5
-4
-3
-2
-1
0
1
2
Tempo
Esp
on
en
ti d
i L
ya
pu
no
v
Esponenti di Lyapunov del RESPONSE: Z-Drive
λ4=1.5814
λ5=-4.8743
Figura 3.12: Esponenti di Lyapunov del sistema driver e del sistema Response.Z-DRIVER
30 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
due sistemi (Figure 3.7 e 3.8).
x1 = α(y1 − x1 − g1(x))
y1 = x1 − y1 + z1 x2 = α(y1 − x2 − g2(x2))
z1 = −βy1 − γz1 z2 = −βy1 − γz2
3.2.3 Decomposizione z-driver
L’ultimo set di simulazioni riguardanti il metodo di sincronizzazione di Peco-ra&Carroll, prevedeva che il segnale proveniente dal Driver fosse la variabile distato z1. In quest’ultimo caso si nota che gli esponenti di Lyapunov del sotto-sistema sono positivi, e come il Teorema sopra esposto prevedeva, non si riescead ottenere nessuna sincronizzazione tra i due sistemi. 3.8.
x1 = α(y1 − x1 − g1(x))
y1 = x1 − y1 + z1 x2 = α(y1 − x2 − g2(x))
z1 = −βy1 − γz1 y2 = x2 − y2 + z1
3.3 Sincronizzazione per accoppiamento
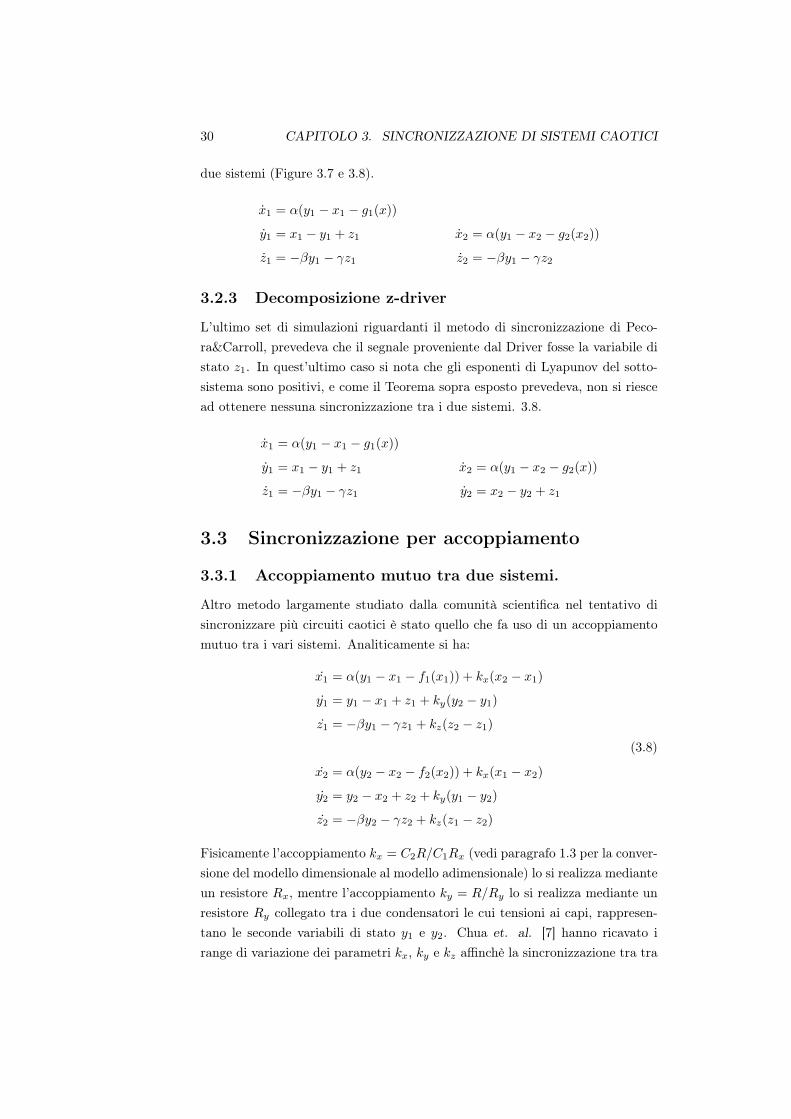
3.3.1 Accoppiamento mutuo tra due sistemi.
Altro metodo largamente studiato dalla comunità scientifica nel tentativo disincronizzare più circuiti caotici è stato quello che fa uso di un accoppiamentomutuo tra i vari sistemi. Analiticamente si ha:
x1 = α(y1 − x1 − f1(x1)) + kx(x2 − x1)
y1 = y1 − x1 + z1 + ky(y2 − y1)
z1 = −βy1 − γz1 + kz(z2 − z1)
x2 = α(y2 − x2 − f2(x2)) + kx(x1 − x2)
y2 = y2 − x2 + z2 + ky(y1 − y2)
z2 = −βy2 − γz2 + kz(z1 − z2)
(3.8)
Fisicamente l’accoppiamento kx = C2R/C1Rx (vedi paragrafo 1.3 per la conver-sione del modello dimensionale al modello adimensionale) lo si realizza medianteun resistore Rx, mentre l’accoppiamento ky = R/Ry lo si realizza mediante unresistore Ry collegato tra i due condensatori le cui tensioni ai capi, rappresen-tano le seconde variabili di stato y1 e y2. Chua et. al. [7] hanno ricavato irange di variazione dei parametri kx, ky e kz affinchè la sincronizzazione tra tra

3.3. SINCRONIZZAZIONE PER ACCOPPIAMENTO 31
kx Livello Sincronizzazione Figura2 NO sincronizzazione 3.13a3 Debole sincr. 3.13c4 Sincronizzazione 3.13e
ky Livello Sincronizzazione Figura0.5 NO sincronizzazione 3.14a0.65 Debole sincr. 3.14c3 Sincronizzazione 3.14e
kz Livello Sincronizzazione Figura0.5 Sincronizzazione instabile 3.15a
0.909:1.85 Sincronizzazione nel range 0.909:1.85 3.15c1.6 Massima Sincronizzazione 3.15e1.86 Perdita di Sincronizzazione 3.15g
Tabella 3.1: Livelli di sincronizzazione ottenuti per vari valori kz, kx e ky.ACCOPPIAMENTO MUTUO.
i due stistemi fosse ottenuta. Limitandoci al caso in cui, di volta in volta, solouno dei tre parametri di accoppiamento era diverso da zero, sono stati ottenutii diversi range. Nelle tabelle che seguono sono stati riassunti i risultati ottenuti.Come è possibile vedere dalla terza parte della tabella (3.1) mentre, sia nel casodi kx 6= 0, e ky 6= 0, esiste una soglia minima dei parametri sopra il quale siottiene sincronizzazione, nel caso kz 6= 0, esiste un range che va da kz = 0.909a kz = 1.85 in cui le variabili si sincronizzano. Per valori di kz ≥ 1.86 si perdenuovamente la sincronizzazione.
3.3.2 Robustezza della sincronizzazione tra due circuitimutuamente accoppiati
In questo paragrafo sono state analizzate le sincronizzazioni ottenibili tra duecircuiti mutuamente accoppiati in cui sono stati aggiunti degli errori percen-tuali nei parametri del sistema Slave. Uno studio più accurato è stato fattoda G.Q.Zhong et. al. nel 1998 [19]. Lo schema base analizzato è il classicoMaster-Slave, dove l’unica differenza sta nel fatto che il valori di α, β e γ delsecondo sistema presentano delle variazioni: questo studio serve a giustificare ilfatto che si riesce comunque a sincronizzare due circuiti reali, in cui i parametri,a causa della non idealità, non sono mai identici tra il Master e lo Slave.Nell’articolo di G.Q.Zhong et. al., sono stati ricavati i valori massimi degli sco-stamenti nei parametri, per cui si riesce ad ottenere una debole sincronizzazione(gli autori suddividono in quattro classi le varie sincronizzazioni ottenibili, in

32 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
0 5 10 15 20 25 30 35 40 45 50-100
-50
0
50
100
x1
-x2
0 5 10 15 20 25 30 35 40 45 50-100
-50
0
50
100
y1-y
2
0 5 10 15 20 25 30 35 40 45 50-300
-200
-100
0
100
200
300
t
z1-z
2
(a) Errore Variabili kx=2
-6 -4 -2 0 2 4 6 8
x 104
-3
-2
-1
0
1
2
3x 10
4 Strange Attractors
(b) Attrattore instabile kx=2
0 10 20 30 40 50 60 70 80 90 100-0.4
-0.2
0
0.2
0.4
x1
-x2
0 10 20 30 40 50 60 70 80 90 100-0.2
-0.1
0
0.1
0.2
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
t
z1-z
2
(c) Errore Variabili kx=3
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Figure di Lissajous
x1
x2
(d) Figura di Lissajous kx=3
0 10 20 30 40 50 60 70 80 90 100-0.015
-0.01
-0.005
0
0.005
0.01
0.015
x1
-x2
0 10 20 30 40 50 60 70 80 90 100-0.015
-0.01
-0.005
0
0.005
0.01
0.015
y1
-y2
0 10 20 30 40 50 60 70 80 90 100-0.06
-0.04
-0.02
0
0.02
0.04
0.06
t
z1-z
2
(e) Errore Variabilikx=4
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Figure di Lissajous
x1
x2
(f) Figura di Lissajous kx=4
Figura 3.13: Vari livelli di sincronizzazione per valori di kx=2, kx=3, e kx=4.ACCOPPIAMENTO MUTUO.
3.3. SINCRONIZZAZIONE PER ACCOPPIAMENTO 33
0 50 100 150 200 250 300 350 400 450 500-5
0
5
x1
-x2
0 50 100 150 200 250 300 350 400 450 500-1
-0.5
0
0.5
1
y1-y
2
0 50 100 150 200 250 300 350 400 450 500-6
-4
-2
0
2
4
6
t
z1-z
2
(a) Errore Variabili ky=0.5
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Figure di Lissajous
x1
x2
(b) Figura di Lissajous ky=0.5
0 50 100 150 200 250 300 350 400-5
0
5
x1
-x2
0 50 100 150 200 250 300 350 400-0.5
0
0.5
y1-y
2
0 50 100 150 200 250 300 350 400-6
-4
-2
0
2
4
6
t
z1-z
2
(c) Errore Variabili ky=0.65
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Figure di Lissajous
x1
x2
(d) Figura di Lissajous ky=0.65
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
x1
-x2
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
t
z1
-z2
(e) Errore Variabiliky=3
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Figure di Lissajous
x1
x2
(f) Figura di Lissajous ky=3
Figura 3.14: Vari livelli di sincronizzazione per valori di ky=0.5, ky=0.65, eky=3. ACCOPPIAMENTO MUTUO.

34 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
0 10 20 30 40 50 60 70 80 90 100-6
-4
-2
0
2
4
6
x1
-x2
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-10
-5
0
5
10
t
z1-z
2
(a) Errore Variabili kz=0.5
-4 -2 0 2 4 6
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Strange Attractors
(b) Attrattore instabile kz=0.5
0 10 20 30 40 50 60 70 80 90 100-1
0
1
2
3
x1
-x2
0 10 20 30 40 50 60 70 80 90 100-0.4
-0.2
0
0.2
0.4
0.6
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-3
-2
-1
0
1
t
z1-z
2
(c) Errore Variabili kz=0.909
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Figure di Lissajous
x1
x2
(d) Figura di Lissajous kz=0.909
0 10 20 30 40 50 60 70 80 90 100-0.8
-0.6
-0.4
-0.2
0
0.2
x1
-x2
0 10 20 30 40 50 60 70 80 90 100-0.2
-0.15
-0.1
-0.05
0
0.05
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-0.2
0
0.2
0.4
0.6
t
z1-z
2
(e) Errore Variabili kz=1.6
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Figure di Lissajous
x1
x2
(f) Figura di Lissajous kz=1.6
0 10 20 30 40 50 60 70 80 90 100-10
-8
-6
-4
-2
0
2
x1
-x2
0 10 20 30 40 50 60 70 80 90 100-2
-1.5
-1
-0.5
0
0.5
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-2
0
2
4
6
8
t
z1-z
2
(g) Errore Variabili kz=1.86
-8 -6 -4 -2 0 2 4 6 8 10
x 107
-4
-3
-2
-1
0
1
2
3
4
5x 10
7 Strange Attractors
(h) Attrattore instabile kz=1.86
Figura 3.15: Vari livelli di sincronizzazione per valori di kz=0.5, kz=0.909,kz=1.6 e kz=1.86. ACCOPPIAMENTO MUTUO.

3.3. SINCRONIZZAZIONE PER ACCOPPIAMENTO 35
relazione al grado somiglianza delle figure di Lissajous ottenute, rispetto allabisettrice ideale).In questo documento ci limitiamo a ottenere dei range di variazioni di un pa-rametro, quando gli altri sono posti nulli. Essendo un circuito non lineare, lavariazione percentuale di un solo parametro, mantenendo gli altri nulli, non èmolto affidabile come misura dello scostamento reale di tutti i parametri presen-ti in un setup sperimentale. Nonostante ciò le simulazioni che seguono, dannol’idea del fatto che la sincronizzazione può comunque essere ottenuta anche conparametri di poco diversi, avendo un opportuno coefficiente di accoppiamentotra i sistemi. In questo set di simulazioni si è fissato il valore kx = 16.1, mentredi volta in volta venivano variati i parametri α, β e γ, da un minimo del 20%a un massimo pari al 200%. Si è riscontrato che la variazione massima ammis-sibile si ottiene per ∆β = 200% e ∆γ = 200%. In questo caso infatti, anche seil valore dei parametri β, e γ del secondo sistema sono il d del corrispondentevalore nel sistema Master, la sincronizzazione è comunque ottenuta. Nel caso diα invece, già con uno scostamento del 100% la sincronizzazione non si ottiene.
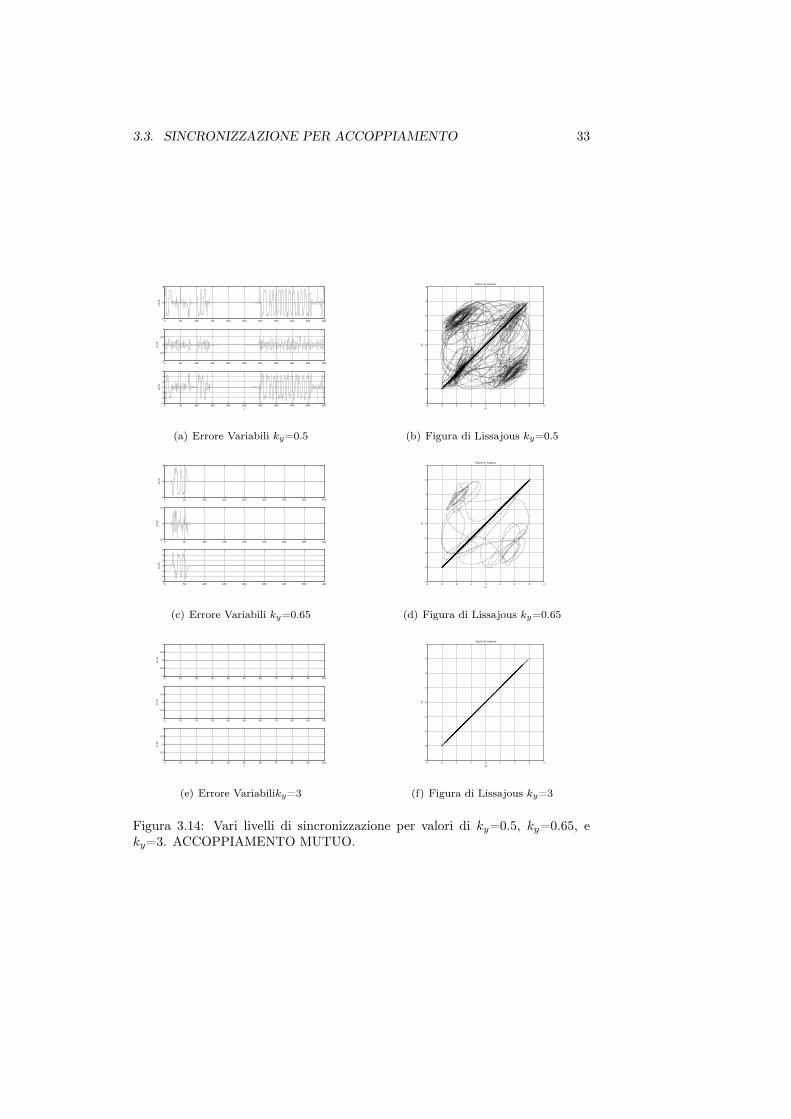
3.3.3 Accoppiamento unidirezionale tra due sistemi.
Questo tipo di sincronizzazione è un caso particolare del metodo precedente-mente discusso. In questo caso infatti, si ha un accoppiamento unidirezionaletra i due sistemi. Questo è possibile realizzarlo fisicamente collegando un buf-fer a valle dei resistori Rx, Ry e Rz precedentemente trattati. Analiticamentestavolta si ha:
x1 = α(y1 − x1 − f1(x1))
y1 = y1 − x1 + z1
z1 = −βy1 − γz1
x2 = α(y2 − x2 − f2(x2)) + kx(x1 − x2)
y2 = y2 − x2 + z2 + ky(y1 − y2)
z2 = −βy2 − γz2 + kz(z1 − z2)
(3.9)
anche in questo caso i parametri utilizzati sono stati α = 10, β = 14.87 eγ = 0. Anche in questo caso le tabelle riassumono i risultati riguardanti lasincronizzazione unidirezionale.
36 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
0 5 10 15 20 25 30 35 40 45 50-4
-2
0
2
4
6
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=5, k
y=0, k
z=0
0 5 10 15 20 25 30 35 40 45 50-3
-2
-1
0
1
2
3
y1-y
2
0 5 10 15 20 25 30 35 40 45 50-15
-10
-5
0
5
10
15
t
z1-z
2
(a) Errore Variabili kx=5
-6 -4 -2 0 2 4 6-4
-3
-2
-1
0
1
2
3
4
Strange Attractors Coefficienti: kx=5, k
y=0, k
z=0
(b) Attrattore instabile kx=5
0 10 20 30 40 50 60 70 80 90 100-0.4
-0.2
0
0.2
0.4
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=6, k
y=0, k
z=0
0 10 20 30 40 50 60 70 80 90 100-0.4
-0.2
0
0.2
0.4
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
t
z1-z
2
(c) Errore Variabili kx=6
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4
Figure di Lissajous Coefficienti: kx=6, k
y=0, k
z=0
x1
x2
(d) Figura di Lissajous kx=6
0 10 20 30 40 50 60 70 80 90 100-0.2
-0.1
0
0.1
0.2
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=8, k
y=0, k
z=0
0 10 20 30 40 50 60 70 80 90 100-0.1
-0.05
0
0.05
0.1
y1
-y2
0 10 20 30 40 50 60 70 80 90 100-0.4
-0.2
0
0.2
0.4
t
z1-z
2
(e) Errore Variabilikx=8
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4
Figure di Lissajous Coefficienti: kx=8, k
y=0, k
z=0
x1
x2
(f) Figura di Lissajous kx=8
Figura 3.16: Vari livelli di sincronizzazione per valori di kx=5, kx=6, e kx=8.ACCOPPIAMENTO UNIDIREZIONALE.

3.3. SINCRONIZZAZIONE PER ACCOPPIAMENTO 37
0 10 20 30 40 50 60 70 80 90 100-5
0
5
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=0, k
y=0.5, k
z=0
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-5
0
5
10
t
z1-z
2
(a) Errore Variabili ky=0.5
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4
Figure di Lissajous Coefficienti: kx=0, k
y=0.5, k
z=0
x1
x2
(b) Figura di Lissajous ky=0.5
0 10 20 30 40 50 60 70 80 90 100-5
0
5
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=0, k
y=2, k
z=0
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-6
-4
-2
0
2
4
6
t
z1-z
2
(c) Errore Variabili ky=2
-4 -3 -2 -1 0 1 2 3 4-3
-2
-1
0
1
2
3
4
Figure di Lissajous Coefficienti: kx=0, k
y=2, k
z=0
x1
x2
(d) Figura di Lissajous ky=2
0 10 20 30 40 50 60 70 80 90 100-0.2
0
0.2
0.4
0.6
0.8
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=0, k
y=5, k
z=0
0 10 20 30 40 50 60 70 80 90 100-0.05
0
0.05
0.1
0.15
y1
-y2
0 10 20 30 40 50 60 70 80 90 100-0.6
-0.4
-0.2
0
0.2
t
z1-z
2
(e) Errore Variabili ky=5
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4
Figure di Lissajous Coefficienti: kx=0, k
y=5, k
z=0
x1
x2
(f) Figura di Lissajous ky=5
Figura 3.17: Vari livelli di sincronizzazione per valori di ky=0.5, ky=2, e ky=5.ACCOPPIAMENTO UNIDIREZIONALE.
38 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
0 10 20 30 40 50 60 70 80 90 100-6
-4
-2
0
2
4
6
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=0, k
y=0, k
z=0.5
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-10
-5
0
5
10
t
z1-z
2
(a) Errore Variabili kz=0.5
-4 -3 -2 -1 0 1 2 3 4-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Strange Attractors Coefficienti: kx=0, k
y=0, k
z=0.5
(b) Attrattore instabile kz=0.5
0 10 20 30 40 50 60 70 80 90 100-6
-4
-2
0
2
4
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=0, k
y=0, k
z=1.8
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-4
-2
0
2
4
6
t
z1-z
2
(c) Errore Variabili kz=1.8
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4
5
6
Figure di Lissajous Coefficienti: kx=0, k
y=0, k
z=1.8
x1
x2
(d) Figura di Lissajous kz=1.8
0 10 20 30 40 50 60 70 80 90 100-2
0
2
4
6
8
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=0, k
y=0, k
z=3
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
1
1.5
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-8
-6
-4
-2
0
2
t
z1-z
2
(e) Errore Variabili kz=3
-4 -3 -2 -1 0 1 2 3 4-8
-6
-4
-2
0
2
4
Figure di Lissajous Coefficienti: kx=0, k
y=0, k
z=3
x1
x2
(f) Figura di Lissajous kz=3
0 20 40 60 80 100 120 140 160 180 2000
10
20
30
40
x1
-x2
Errore tra le variabili di stato.Coefficienti: kx=0, k
y=0, k
z=6
0 20 40 60 80 100 120 140 160 180 2000
2
4
6
8
10
12
y1-y
2
0 20 40 60 80 100 120 140 160 180 200-30
-20
-10
0
10
t
z1-z
2
(g) Errore Variabili kz=6
-40 -35 -30 -25 -20 -15 -10 -5 0 5-12
-10
-8
-6
-4
-2
0
2
Strange Attractors Coefficienti: kx=0, k
y=0, k
z=6
(h) Attrattore instabile kz=6
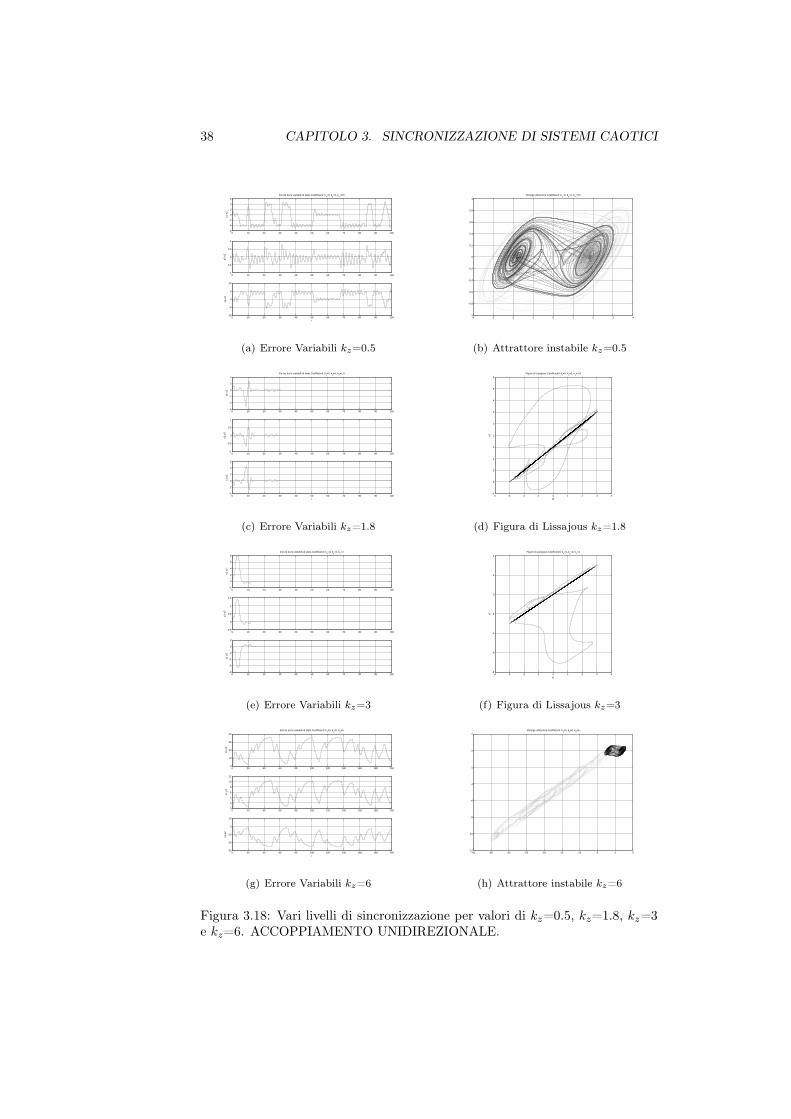
Figura 3.18: Vari livelli di sincronizzazione per valori di kz=0.5, kz=1.8, kz=3e kz=6. ACCOPPIAMENTO UNIDIREZIONALE.

3.4. SINCRONIZZAZIONE IMPULSIVA 39
kx Livello Sincronizzazione Figura5 NO sincr., secondo diventa instabile. 3.16a6 Debole sincr. 3.16c8 Sincronizzazione 3.16e
ky Livello Sincronizzazione Figura0.5 NO sincronizzazione 3.17a2 Sincr. dopo lungo transitorio 3.17c5 Sincronizzazione 3.17e
kz Livello Sincronizzazione Figura0.5:1.7 NO Sincr.Secondo Sist. instabile 3.18a1.8 Sincronizzazione nel range 0.909:1.85 3.18c3 Massima Sincronizzazione 3.18e6 Instabile in una direzione 3.18g
Tabella 3.2: Livelli di sincronizzazione ottenuti per vari valori kz, kx e ky.ACCOPPIAMENTO UNIDIREZIONALE.
3.4 Sincronizzazione impulsiva
Come è stato largamente discusso in precedenza, la sincronizzazione riveste unaimportanza notevole perchè permette, mediante opportuni metodi, la trasmis-sione di segnali criptati, da un sistema sorgente a un sistema destinatario. Ilmetodo di sincronizzazione sperimentato da Pecora & Carroll nel 1990, permet-te la sincronizzazione del sistema destinatario (Slave), mediante un persistentesegnale di controllo da parte del sistema sorgente (Master). Ovviamente, ilsegnale di sincronizzazione, che rappresenta l’analogo del segnale portante nelcaso di classiche trasmissioni modulate in frequenza, non trasporta in se infor-mazione utile. Questo porta inevitabilemente ad uno spreco della banda delcanale disponibile. Il concetto introdotto per la prima volta da Yang & Chuanel 1997, è quello di ottenere la sincronizzazione completa, dei due sistemi, me-diante un controllo da parte del segnale proveniente dal Driver (Master), chenon sia continuo ma impulsivo. Questo permette di ottenere una sincronizza-zione completa tra i due sistemi, mediante l’applicazione del segnale pilota inslot temporali di breve durata. In questo modo, il contributo di occupazione dibanda del canale, da parte del segnale di sincronizzazione, è notevolmente ridot-to e quindi permette una trasmissione del segnale con una efficienza maggiore.In un sistema di comunicazione sicura, basata sul metodo della sincronizzazio-ne impulsiva, il segnale trasmesso consiste in una sequenza di slot temporali.Ogni slot di lunghezza T secondi, contiene una parte di segnale di lunghezzaT1 utilizzato per ottenere una sincronizzazione impulsiva, mentre nel restante

40 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
slot T2=T -T1, è contenuto il segnale criptato da trasmettere. Sperimentalmenteperó la sincronizzazione impulsiva é difficile da ottenere a causa dei seguentimotivi:
• I mismatches dei parametri tra i due circuiti da sincronizzare sono inevi-tabili;
• Il rumore dovuto alle non idealitá;
• Il periodo dell’impulso non puó essere troppo stretto perché il rumore e ledifferenze nei parametri tendono a far desincronizzare i due sistemi.
Nonostante ció, il primo esperimento di sincronizzazione impulsiva é stato rea-lizzato da Panas et al., [17] nel 1998. In questo paragrafo saranno studiatidiversi casi di sincronizzazione impulsiva, mediante l’uso del simulatore PSpice.Lo schema di sincronizzazione base é un caso particolare della sincronizzazioneunidirezionale, in cui stavolta il segnale da parte del Driver giunge al Drivensolo negli intevalli di tempo di lunghezza T1. Si è trovato [15] che esistono deivalori di soglia di frequenza e duty-cycle del segnale si sincronizzazione, sotto ilquale la sincronizzazione non si raggiunge. In figura (3.19) é rappresentato loschema utilizzato.
Come é possibile vedere in figura (3.19), sono stati presi in considerazioneuna coppia di circuiti di Chua, in cui i vari valori dei parametri tra loro ri-sultavano uguali. Il primo circuito, che chiameremo Master, é collegato con ilsecondo (Slave), attraverso un amplificatore operazionale in configurazione abuffer. Questo permette di realizzare un accoppiamento unidirezionale, tra laseconda variabile di stato dei due sistemi, ovvero la tensione al condensatore C1
e la tensione ai capi di C8. Il blocco in cascata al buffer, é uno switch CD4066B,pilotato da un segnale impulsivo. Come ampiamente disquisito nel paragrafo1.3, la non linearitá PWL é realizzata dalla coppia di amplificatori operazionali.La non linearitá ottenuta é raffigurata in figura (3.20) a pagina 42. Le condut-tanze hanno valori G1=−0.5832 mS, G2=−0.2877 mS e G3=4.9275 mS, mentreE, il valore di tensione per cui si ha il cambio di pendenza della conduttanzavale 1.28 V. Si noti che la non linearitá reale, presenta dei tratti a pendenzaG3 che non sono considerati nella trattazione teorica del circuito di Chua, essisono introdotti dagli effetti di saturazione introdotti dai due amplificatori, cherealizzano la PWL. Nonostante ció il comportamento rimane invariato rispettoalla trattazione teorica. I due circuiti considerati stand-alone, hanno dei valoridei componenti tali da presentare in entrambi un comportamento caotico, in-fatti nel diagramma delle fasi é presente il noto comportamento Double-Scroll(Figura 3.21).

3.4. SINCRONIZZAZIONE IMPULSIVA 41
Vm
en
o
Vp
iu
Vp
iuV
piu
Y2
Vm
eno
Y1
Vm
en
o
Vm
en
o
Vp
iu
Vp
iu
Vm
en
o
Vm
en
o
X1
X2
pu
lse
Vp
iu
Vm
en
o
Vp
iu
y1
o
ho
0
00
0
Per f=100 Hz non si sincronizza (PER=10m; PW=5m)
Per f=1000 Hz si sincronizza poco (PER=1m; PW=0.5m)
Per f=10 kHz si sincronizza (PER=0.1m; PW=0.05m)
Sincronizzazione impulsiva tra due circuiti di Chua Per f=1000 Hz non sincronizzano per (PER=1m; PW=0.2m)
Per f=1000 Hz si sincronizza poco (PER=1m; PW=0.6m)
Per f=1000 Hz si sincronizza abbastanza (PER=1m; PW=0.8m)
+3
-2
V+8
V-4
OU
T1
U1
A
TL
08
2
U1
A
TL
08
2
R3
40
00
R3
40
00
+5
-6
V+8
V-4
OU
T7
U2
B
TL
08
2
U2
B
TL
08
2
R9
40
00
R9
40
00
R4
22
0
R4
22
0
C9
58
n
IC =
0.0
1
C9
58
n
IC =
0.0
1
C8
6.8
n
IC =
0.0
1
C8
6.8
n
IC =
0.0
1
V1
9V
dc
V1
9V
dc
R5
22
0
R5
22
0
R1
6
22
0
R1
6
22
0
12
L1
18
.5m
IC =
1u
L1
18
.5m
IC =
1u
R2
0
12
R2
0
12
R7
22
k
R7
22
k
R1
9
12
R1
9
12
12
L2
18
.5m
H
IC =
1u
L2
18
.5m
H
IC =
1u
R6
30
00
R6
30
00
+3
-2
V+8
V-4
OU
T1 U
6A
TL
08
2
U6
A
TL
08
2
In1
Ou
t2
Vc
3
Vd
d4
Vss 5
U7
CD
4066B
U7
CD
4066B
R1
7
22
0
R1
7
22
0
C1
6.8
n
IC =
0.0
1
C1
6.8
n
IC =
0.0
1
R1
22
k
R1
22
k
C2
58
n
IC =
0.0
1
C2
58
n
IC =
0.0
1R
8
22
k
R8
22
k
R1
5
18
95
R1
5
18
95
V3
TD
= 1
nT
F =
1n
PW
= 8
80
0n
PE
R =
55
u
V1
= -
9
TR
= 1
n
V2
= 9
V3
TD
= 1
nT
F =
1n
PW
= 8
80
0n
PE
R =
55
u
V1
= -
9
TR
= 1
n
V2
= 9
+3
-2
V+8
V-4
OU
T1
U5A
TL
08
2
U5A
TL
08
2
+5
-6
V+8
V-4
OU
T7
U5
B
TL
08
2
U5
B
TL
08
2
R2
22
k
R2
22
k
V2
9V
dc
V2
9V
dc
R18
30
00
R18
30
00
R1
0
18
95
R1
0
18
95
Figura 3.19: Schema utilizzato per ottenere la sincronizzazione impulsiva deidue circuiti di Chua

42 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
Date/Time run: 04/08/08 11:12:55** Profile: "SCHEMATIC1-PWL_SWEEP" [ D:\Chua_pulsed\pwl-pspicefiles\schematic1\pwl_sweep.sim ]
Date: April 08, 2008 Page 1 Time: 12:19:41 V_V3
-10V -5V 0V 5V 10V-4.0mA
-2.0mA
0A
2.0mA
4.0mA
I(V3:+)
EE
EE
G1
G2
G3
Figura 3.20: PWL utilizzato per modellizzare il diodo di Chua
3.4.1 Sincronizzazione impulsiva al variare della frequenza
Il primo set di simulazioni sono state effettuate, facendo variare la frequenzadel treno di impulsi che pilotano lo switch, da un minimo di 100 Hz a unmassimo di 10 kHz. Il duty-cicle lo si é fissato ad un valore pari al 50% pertutto il primo set di simulazioni. Si é riscontrato che, per bassi valori frequenzei due circuiti non presentavano alcuna sincronizzazione. Come é possibile notaredalla Figura 3.22(a), solo negli istanti temporali in cui l’impulso é alto, si ha lasincronizzazione. Successivamente é stato analizzato il caso in cui la frequenzadi switching era pari a 1 kHz. In questo caso, osservando il diagramma diChua, si nota una leggera sincronizzazione del secondo rispetto al primo sistema.Passando ad una frequenza di 10 kHz, si nota che l’andamento della variabile distato del secondo Oscillatore di Chua segue, perfettamente il segnale del Driver.
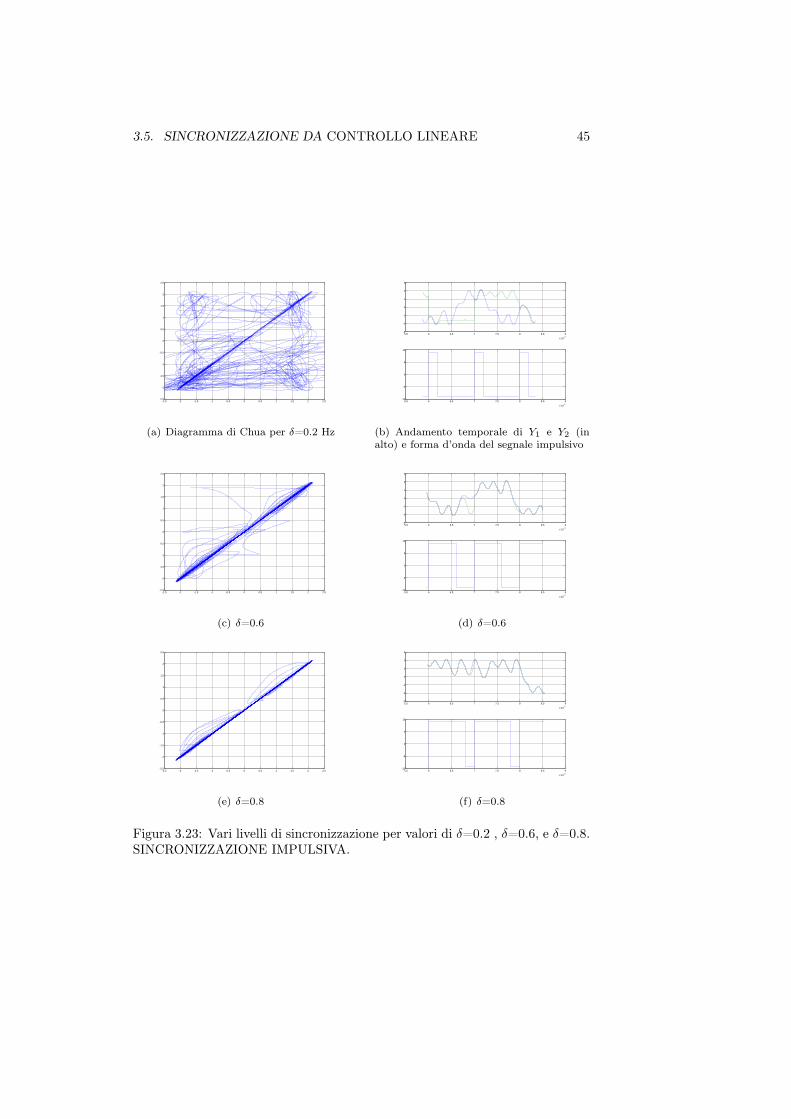
3.4.2 Sincronizzazione impulsiva variando il Duty - Cycle
In questo secondo caso, tenendo sempre presente lo schema di Figura (3.19), sonostati analizzati gli andamenti della variabile di stato Y2 dello Slave, al variare delDuty-Cycle δ, mantenendo fissata la frequenza a 1 kHz. La prima simulazione,assumendo un δ pari al 20%, ha rivelato la completa assenza di sincronizzazionetra i due, Figura 3.23(a). Nel caso in cui il valore di δ era superiore al 60%,si otteneva una sincronizazione perfetta. Una facile interpretazione scaturisce

3.5. SINCRONIZZAZIONE DA CONTROLLO LINEARE 43Date/Time run: 04/08/08 09:58:22** Profile: "SCHEMATIC1-Scroll_01" [ C:\Documents and Settings\Rino\Desktop\Nuova cartella\pulsed_freq-pspicefile...
Temperature: 27.0
Date: April 08, 2008 Page 1 Time: 10:25:14 V(Y1)
-3.0V -2.0V -1.0V -0.0V 1.0V 2.0V 3.0VV(X1)
-400mV
-200mV
0V
200mV
400mV
Figura 3.21: Double Scroll che presentano i due circuiti di Chua prima dellasincronizzazione.
dal fatto che un Duty-Cycle troppo basso comporta uno slot temporale troppopiccolo affinchè il sistema Slave possa sincronizzarsi con il sistema Master.
3.5 Sincronizzazione da Controllo Lineare
Molti schemi di sincronizzazione Master-Slave trattati in letteratura, utilizza-no come segnale di controllo, una variabile del sistema master. Il segnale dicontrollo serve a sincronizzare il sistema Slave nel senso che, come spiegato pre-cedentemente, le traiettorie dei due sistemi, asintoticamente tendono ad essereuguali. La stabilità della sincronizzazione è dimostrata numericamente tramiteil calcolo degli esponenti di Lyapunov condizionali del sottosistema [1] o tramitela ricerca di una funzione di Lyapunov [11]. Nei paragrafi precedenti è statodimostrato che si può ottenere sincronizzazione prelevando una delle variabilidi stato del driver, e collegandola nella rispettiva variabile del sistema Slavemediante un opportuno accoppiamento. Superato un certo livello di soglia delcoefficiente di accoppiamento, si osserva che le traiettorie asintotivamente ten-dono ad essere uguali.Schweizer et. al, nel 1995 hanno dimostrato che prelevando la seconda variabiledi stato e la rispettiva derivata dal Master, e collegandola al sistema Slave, èstato dimostrato che è possibile ottenere la sincronizzazione tra i due. Effettua-re l’operazione di derivazione numerica della variabile produce però significativierrori nella simulazione.

44 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
(a) Diagramma di Chua per impulsi confrequenza f=100 Hz
0.015 0.02 0.025 0.03 0.035 0.04-3
-2
-1
0
1
2
3
0.015 0.02 0.025 0.03 0.035 0.04-10
-5
0
5
10
(b) Andamento temporale di Y1 e Y2 (inalto) e forma d’onda del segnale impulsivo
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
(c) f=1 kHz
0.0555 0.056 0.0565 0.057 0.0575 0.058 0.0585 0.059 0.0595-3
-2
-1
0
1
2
3
0.0555 0.056 0.0565 0.057 0.0575 0.058 0.0585 0.059 0.0595-10
-5
0
5
10
(d) f=1 kHz
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
(e) f=10 kHz
0.014 0.0145 0.015 0.0155 0.016 0.0165 0.017-3
-2
-1
0
1
2
3
0.014 0.0145 0.015 0.0155 0.016 0.0165 0.017-10
-5
0
5
10
(f) f=10 kHz
Figura 3.22: Vari livelli di sincronizzazione per valori di f=100 Hz, f=1 kHz,e f=10 kHz. SINCRONIZZAZIONE IMPULSIVA.
3.5. SINCRONIZZAZIONE DA CONTROLLO LINEARE 45
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
(a) Diagramma di Chua per δ=0.2 Hz
5.5 6 6.5 7 7.5 8 8.5 9
x 10-3
-3
-2
-1
0
1
2
3
5.5 6 6.5 7 7.5 8 8.5 9
x 10-3
-10
-5
0
5
10
(b) Andamento temporale di Y1 e Y2 (inalto) e forma d’onda del segnale impulsivo
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
(c) δ=0.6
5.5 6 6.5 7 7.5 8 8.5 9
x 10-3
-3
-2
-1
0
1
2
3
5.5 6 6.5 7 7.5 8 8.5 9
x 10-3
-10
-5
0
5
10
(d) δ=0.6
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
(e) δ=0.8
5.5 6 6.5 7 7.5 8 8.5 9
x 10-3
-3
-2
-1
0
1
2
3
5.5 6 6.5 7 7.5 8 8.5 9
x 10-3
-10
-5
0
5
10
(f) δ=0.8
Figura 3.23: Vari livelli di sincronizzazione per valori di δ=0.2 , δ=0.6, e δ=0.8.SINCRONIZZAZIONE IMPULSIVA.

46 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
Questo paragrafo, invece, si riferisce a un lavoro di Wang et. al del 1998 [12],in cui il segnale di controllo lineare retroazionato è prelevato dalla terza varia-bile di stato, e mediante dei coefficienti k è collegato a tutte tre le variabili delsistema Slave. Nello spazio delle fasi questo significa:
Master
x1 = α(y1 − x1 − f(x1))
y1 = x1 − y1 + z1
z1 = −βy1
(3.10)
Slave
x2 = α(y2 − x2 − f(x2)) + k1(z1 − z2)
y2 = x2 − y2 + z2 + +k2(z1 − z2)
z2 = −βy2 + +k3(z1 − z2)
(3.11)
Si dimostra il seguente teorema.
Teorema: In riferimento ai sistemi (3.10) e (3.11), supponiamo che il vettoredi retroazione k=[k1, k2, k3]T è scelto come segue:
k =
k1
k2
k3
=
−1− γβ − 1+γ
β − 1β
− γβ − 1β 0
1 0 0
3θ
3θ2
θ3
(3.12)
Allora, se θ è grande abbastanza, allora il sistema Slave si sincronizzarà glo-balmente con il sistema Master per qualunque valore di condizioni iniziali delsecondo sistema.
La dimostrazione del suddetto teorema è stata omessa. Nella pratica si ottienesincronizzazione asintotica per valori di θ ≥ 1 anche se per valori di θ ≈ 0.5 siottiene un errore asintotico costante piccolo. Per valori grandi di θ, il tempo disincronizzazione è molto piccolo (dell’ordine di 10−4 secondi)
3.6 Sincronizzazione da Controllo Adattativo
Come precedentemente discusso nel paragrafo 3.1, un altro approccio utilizzatoper ottenere sincronizzazione tra due sistemi operanti in regime caotico è quel-lo che fa uso del controllo retroazionato. Ovviamente molti approcci tra cuiquelli basati sul controllo lineare convenzionale oppure sul controllo nonlineareavanzato, sono stati ampiamente studiati da [8] e [9]. In molti di questi lavoriesistenti, è essenziale la conoscenza dei parametri presenti nel modello. Nellapratica però questo non avviene mai a causa della incertezza dovuta alle non
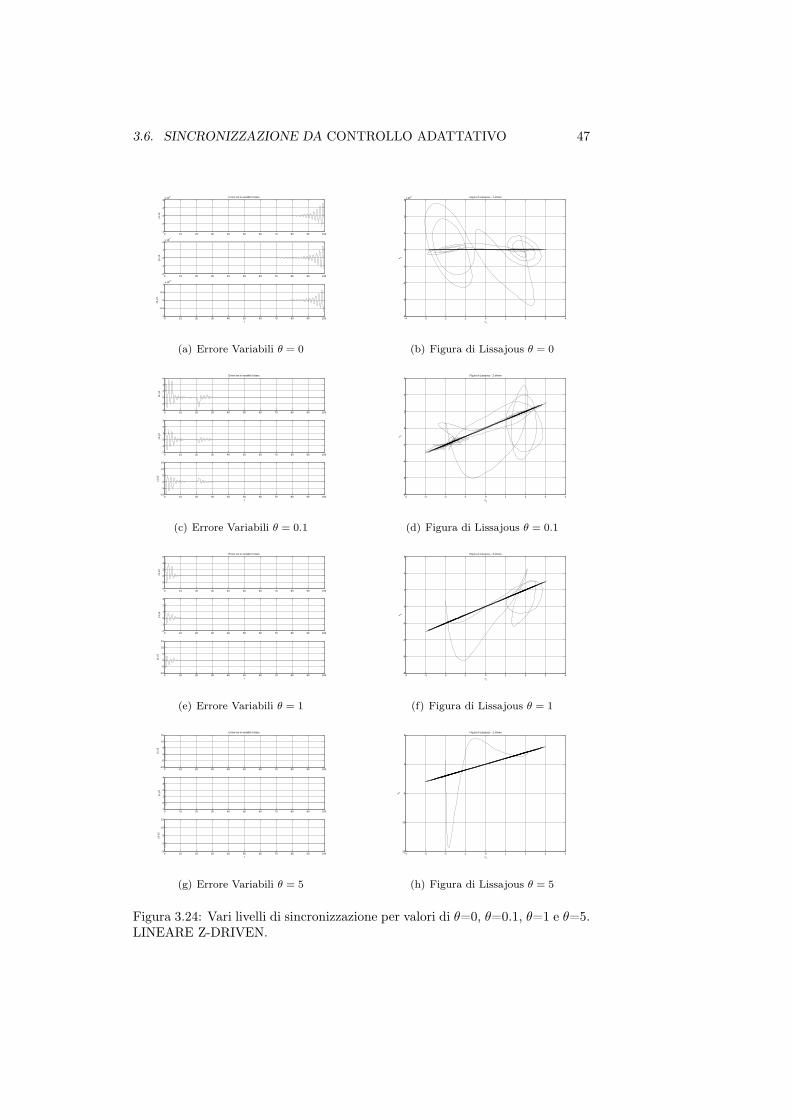
3.6. SINCRONIZZAZIONE DA CONTROLLO ADATTATIVO 47
0 10 20 30 40 50 60 70 80 90 100-4
-2
0
2
4x 10
9
x1
-x2
Errore tra le variabili di stato.
0 10 20 30 40 50 60 70 80 90 100-2
-1
0
1
2x 10
9
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1x 10
10
t
z1-z
2
(a) Errore Variabili θ = 0
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3x 10
9
x1
x 2
Figura di Lissajous - Z-driven
(b) Figura di Lissajous θ = 0
0 10 20 30 40 50 60 70 80 90 100-4
-2
0
2
4
6
x1
-x2
Errore tra le variabili di stato.
0 10 20 30 40 50 60 70 80 90 100-2
-1
0
1
2
3
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-10
-5
0
5
10
15
t
z1-z
2
(c) Errore Variabili θ = 0.1
-4 -3 -2 -1 0 1 2 3 4-8
-6
-4
-2
0
2
4
6
x1
x 2
Figura di Lissajous - Z-driven
(d) Figura di Lissajous θ = 0.1
0 10 20 30 40 50 60 70 80 90 100-4
-2
0
2
4
6
x1
-x2
Errore tra le variabili di stato.
0 10 20 30 40 50 60 70 80 90 100-2
-1
0
1
2
3
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-10
-5
0
5
10
15
t
z1-z
2
(e) Errore Variabili θ = 1
-4 -3 -2 -1 0 1 2 3 4-8
-6
-4
-2
0
2
4
6
x1
x 2
Figura di Lissajous - Z-driven
(f) Figura di Lissajous θ = 1
0 10 20 30 40 50 60 70 80 90 100-10
-5
0
5
10
15
x1
-x2
Errore tra le variabili di stato.
0 10 20 30 40 50 60 70 80 90 100-1
0
1
2
3
4
y1-y
2
0 10 20 30 40 50 60 70 80 90 100-5
0
5
10
15
t
z1-z
2
(g) Errore Variabili θ = 5
-4 -3 -2 -1 0 1 2 3 4-15
-10
-5
0
5
x1
x 2
Figura di Lissajous - Z-driven
(h) Figura di Lissajous θ = 5
Figura 3.24: Vari livelli di sincronizzazione per valori di θ=0, θ=0.1, θ=1 e θ=5.LINEARE Z-DRIVEN.

48 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
idealità presenti, quindi la progettazione di un controllore adattativo per il con-trollo e la sincronizzazione dei sistemi caotici è molto importante. L’approcciodescritto per progettare questo controllore è stato sviluppato da Naseh e Hae-ry nel 2005 [10]. Esso viene applicato per ottenere la sincronizzazione tra duecircuiti di Chua, descritti nello spazio di stato dalle seguenti:
x = α(y − x− f(x))
y = x− y + z
z = −βy
dove,f(x) = bx+ 0.5(a− b)(|x+ 1| − |x− 1|) (3.13)
In quest’ultima espressione, a = −0.72 e b = −1.13 rappresentano le pendenzedella non linerità trattate nel primo capitolo. I valori di α = 9.35, β = 14.79e γ = 0, sono tali che il sistema presenta un comportamento caotico. Conside-riamo adesso due sistemi tipo (3.6) in cui uno viene chiamato Master e l’altroSlave. Il sistema Slave, è uguale al Master, ma presenta degli ingressi u1, u2 eu3 ovvero i controllori adattativi da determinare.
Master
x1 = α(y1 − x1 − f(x1))
y1 = x1 − y1 + z1
z1 = −βy1
(3.14)
Slave
x2 = α(y2 − x2 − f(x2)) + u1
y2 = x2 − y2 + z2 + u2
z2 = −βy2 + u3
(3.15)
Definiamo i segnali errori come:ex = x1 − x2
ey = y1 − y2ez = z1 − z2
(3.16)
Quindi il sistema dinamico errore sarà dato da:ex = αey − αex − α[f(x1)− f(x2)]− u1
ey = ex − ey + ez − u2
ez = −βey − u3

3.7. EFFETTI BENEFICI DEL RUMORE 49
Considerando i sistemi dinamici Master, Slave e il sistema Errore si dimostra ilseguente teorema:
Teorema: Il sistema Slave (3.15) può essere sincronizzato con il sistema Ma-ster (3.14) usando la seguente legge di controllo u2 = u3 = 0 e u1 = kex, dovek = Ae2x, A > 0.
La dimostrazione del suddetto teorema e stata omessa ma può essere trova-ta in [10]. Sostanzialmente si trova che per questi valori di A e della legge dicontrollo utilizzata, la funzione di Lyapunov candidata:
V (e) = βe2x + αβe2y + βe2z − neyez +D(k − k)2
è definita positiva, mentre la dV/dt < 0 nello spazio descritto dalle variabilierrore (con D > 0, k e n opportuni parametri). Sfruttando quindi i concetti distabilità asintotica del sistema errore, descritti nella teoria di Lyapunov si ottienela sincronizzazione richiesta. Nelle simulazioni effettuate sono stati analizzati icasi in cui A assumeva i valori 0, 0.1, 5 e 1000. Come affermato dal teorema dicui sopra, per A = 0, non si ha sincronizzazione mentre per valori di A > 0, letraiettorie del sistema Slave inseguono quelle del sistema Master. Incrementandoil valore di A si ottiene una sincronizzazione in un tempo minore.
3.7 Effetti benefici del rumore
Si è osservato che due circuiti di Chua operanti in regime caotico, se sottopostiad un medesimo segnale di rumore, presentano delle peculiarità interessanti. Inparticolare si è visto che in questo caso il rumore svolge una funzione sincroniz-zante tra i due sistemi. Poichè questo effetto è pur sempre piccolo, stavolta nonverrà analizzato mediante l’uso figure di Lissajous, ma tramite la distribuzio-ne dell’errore tra le due variabili da sincronizzare. Con riferimento alla figura(3.26) si è osservato tramite il simulatore PSpice che, quando i due sistemi so-no completamente disaccoppiati le variabili sono visibilmente incorrelate (3.27).Diversamente accade quando entrambi i sistemi sono connessi ad una medesimasorgente di rumore. In questo caso infatti, analizzando l’andamento della distri-buzione di errore, si osserva una maggiore probabilità di errore attorno allo zerorispetto al caso in cui il segnale errore non è presente. In questo caso infatti siosservano dei picchi molto più sostenuti nelle zone di +3 volts e −3 volts. Daun altro punto di vista questo si può esprimere dicendo che, nel caso in cui èpresente una sorgente di errore in entrambi i circuiti, la permanenza in uno deidue lobi dell’attrattore caotico è più lunga l’andamento delle variabili di stato

50 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
0 20 40 60 80 100 120 140 160 180 200-5
0
5Dinamica degli Errori e di k. A = 0 (1/4)
ex
0 20 40 60 80 100 120 140 160 180 200-1
-0.5
0
0.5
1
ey
0 20 40 60 80 100 120 140 160 180 200-10
-5
0
5
10
ez
tempo
0 20 40 60 80 100 120 140 160 180 200-1
-0.5
0
0.5
1
k
tempo
(a) Errore Variabili A = 0
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Figura di Lissajous. x1 vs x
2 A = 0 (1/4)
x 2
x1
(b) Figura di Lissajous A = 0
0 20 40 60 80 100 120 140 160 180 200-5
0
5Dinamica degli Errori e di k. A = 0.1 (2/4)
ex
0 20 40 60 80 100 120 140 160 180 200-4
-2
0
2
4
ey
0 20 40 60 80 100 120 140 160 180 200-20
-10
0
10
20
ez
tempo
0 20 40 60 80 100 120 140 160 180 2000
5
10
15
k
tempo
(c) Errore Variabili A = 0.1
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-5
-4
-3
-2
-1
0
1
2
3
4
Figura di Lissajous. x1 vs x
2 A = 0.1 (2/4)
x 2
x1
(d) Figura di Lissajous A = 0.1
0 20 40 60 80 100 120 140 160 180 200-1
0
1
2Dinamica degli Errori e di k. A = 5 (3/4)
ex
0 20 40 60 80 100 120 140 160 180 200-1
-0.5
0
0.5
1
ey
0 20 40 60 80 100 120 140 160 180 200-4
-2
0
2
4
ez
tempo
0 20 40 60 80 100 120 140 160 180 2000
5
10
15
k
tempo
(e) Errore Variabili A = 5
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Figura di Lissajous. x1 vs x
2 A = 5 (3/4)
x 2
x1
(f) Figura di Lissajous A = 5
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
0.4
0.6Dinamica degli Errori e di k. A = 1000 (4/4)
ex
0 20 40 60 80 100 120 140 160 180 200-0.4
-0.2
0
0.2
0.4
ey
0 20 40 60 80 100 120 140 160 180 200-2
-1
0
1
2
ez
tempo
0 20 40 60 80 100 120 140 160 180 2000
10
20
30
40
k
tempo
(g) Errore Variabili A = 1000
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Figura di Lissajous. x1 vs x
2 A = 1000 (4/4)
x 2
x1
(h) Figura di Lissajous A = 1000
Figura 3.25: Vari livelli di sincronizzazione per valori di A=0, A=0.1, A=5 eA=1000. ACCOPPIAMENTO ADATTATIVO.

3.7. EFFETTI BENEFICI DEL RUMORE 51
sono più correlate, mentre nel caso in cui il rumore non è presente la perma-nenza nei due lobi dell’attrattore è molto più breve e le due dinamiche risultanoessere incorrelate.

52 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI
Vm
en
o
Vp
iu
Vp
iuV
piu
Vm
en
o
Y1
Vm
en
o
Vm
en
o
X1
X2
Y2
Vp
iu
Vm
en
o
Vp
iu
no
ise
Vp
iuV
piu
Vm
en
oV
me
no
0
00
0
Due circuiti di Chua sottoposti a rumore
+3
-2
V+8
V-4
OU
T1
U1
A
TL
08
2
U1
A
TL
08
2
R3
40
00
R3
40
00
+5
-6
V+8
V-4
OU
T7
U2
B
TL
08
2
U2
B
TL
08
2
R9
40
00
R9
40
00
R4
22
0
R4
22
0
C9
58
n
IC =
0.0
1
C9
58
n
IC =
0.0
1
C8
6.8
n
IC =
0.0
1
C8
6.8
n
IC =
0.0
1
V1
9V
dc
V1
9V
dc
V3 c:\
pw
lFile
.in
V3 c:\
pw
lFile
.in
R2
3
10
00
00
R2
3
10
00
00
+5
-6
V+8
V-4
OU
T7
U7
B
TL
08
2
U7
B
TL
08
2
R5
22
0
R5
22
0
R2
2
10
00
00
R2
2
10
00
00
R1
6
22
0
R1
6
22
0
12
L1
18
.5m
IC =
1u
L1
18
.5m
IC =
1u
R2
0
12
R2
0
12
R7
22
k
R7
22
k
R1
9
12
R1
9
12
12
L2
18
.5m
H
IC =
1u
L2
18
.5m
H
IC =
1u
R6
30
00
R6
30
00
R1
7
22
0
R1
7
22
0
C1
6.8
n
IC =
0.0
1
C1
6.8
n
IC =
0.0
1
R1
22
k
R1
22
k
C2
58
n
IC =
0.0
1
C2
58
n
IC =
0.0
1R
8
22
k
R8
22
k
R1
5
18
95
R1
5
18
95
R2
1
18
95
R2
1
18
95
+3
-2
V+8
V-4
OU
T1
U5
A
TL
08
2
U5
A
TL
08
2
+5
-6
V+8
V-4
OU
T7
U5
B
TL
08
2
U5
B
TL
08
2
R2
22
k
R2
22
k
V2
9V
dc
V2
9V
dc
R1
8
30
00
R1
8
30
00
+5
-6
V+8
V-4
OU
T7
U6
B
TL
08
2
U6
B
TL
08
2
R1
0
18
95
R1
0
18
95
Figura 3.26: Due circuiti di Chua sottoposti a rumore.

3.7. EFFETTI BENEFICI DEL RUMORE 53
50 55 60 65 70 75 80 85 90 95 100-3
-2
-1
0
1
2
3
ms
vo
ltsDinamica Y1 e Y2 senza rumore
Y1Y2
-5 -4 -3 -2 -1 0 1 2 3 4 50
10
20
30
40
50
60
70
80
volts
sa
mp
led
po
ints
Distribuzione errore tra Y1 e Y2
(a) Variabili e Distribuzione errore senza rumore
50 55 60 65 70 75 80 85 90 95 100-3
-2
-1
0
1
2
3
ms
volts
Dinamica Y1 e Y2 con rumore
Y1Y2
-5 -4 -3 -2 -1 0 1 2 3 4 50
10
20
30
40
50
60
70
80
volts
sa
mp
led
po
ints
Distribuzione errore tra Y1 e Y2
(b) Variabili e Distribuzione errore in presenza di rumore
Figura 3.27: Confronto distribuzione errore e andamenti variabili di stato.

54 CAPITOLO 3. SINCRONIZZAZIONE DI SISTEMI CAOTICI

Elenco delle figure
1.1 Circuito di Chua . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2 Nonlinearità presente nel modello. . . . . . . . . . . . . . . . . . 81.3 Circuito di Chua con nonlinearità Kennedy (blocco OP Amp sulla
destra). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4 Grafico di biforcazione per il circuito di Chua, in cui alfa varia
da 8.8 a 9.25 e beta e fissato a 16. . . . . . . . . . . . . . . . . . 101.5 Traiettorie nello spazio delle fasi di x e y per vari valori di α. . . 11
2.1 Propagazione di una perturbazione iniziale e esponenti di Lyapunov. 132.2 (In alto) Data una sfera unitaria di condizioni iniziali, dopo un
certo periodo di tempo viene mappata dalla matrice M in unellissoide come dal teorema di Oseledec. (In basso) Procedura diortonormalizzazione di Gram-Schmidt. Si nota che le aree primae dopo l’ortonormalizzazione sono uguali. . . . . . . . . . . . . . 17
2.3 Metodo pratico per il calcolo del primo esponente di Lyapunov. . 192.4 Insieme di Mandelbrot (1979) . . . . . . . . . . . . . . . . . . . . 19
3.1 C.Huygens e l’esperimento dei pendoli. . . . . . . . . . . . . . . . 223.2 Lingua di Arnold . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.3 Schema di principio Driver - Response . . . . . . . . . . . . . . . 253.4 Andamento delle variabili di stato x1 e x2, nel tempo. . . . . . . 263.5 Figura di Lissajous tra x1 e x2.. . . . . . . . . . . . . . . . . . . . 273.6 Esponenti di Lyapunov del sistema driver e del sistema Response.
X-DRIVER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.7 Andamento delle variabili di stato x1 e x2, nel tempo. . . . . . . 273.8 Figura di Lissajous tra x1 e x2.. . . . . . . . . . . . . . . . . . . . 283.9 Esponenti di Lyapunov del sistema driver e del sistema Response.
Y-DRIVER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.10 Andamento delle variabili di stato x1 e x2, nel tempo. . . . . . . 283.11 Figura di Lissajous tra x1 e x2.. . . . . . . . . . . . . . . . . . . . 29
55

56 ELENCO DELLE FIGURE
3.12 Esponenti di Lyapunov del sistema driver e del sistema Response.Z-DRIVER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.13 Vari livelli di sincronizzazione per valori di kx=2, kx=3, e kx=4.ACCOPPIAMENTO MUTUO. . . . . . . . . . . . . . . . . . . . 32
3.14 Vari livelli di sincronizzazione per valori di ky=0.5, ky=0.65, eky=3. ACCOPPIAMENTO MUTUO. . . . . . . . . . . . . . . . 33
3.15 Vari livelli di sincronizzazione per valori di kz=0.5, kz=0.909,kz=1.6 e kz=1.86. ACCOPPIAMENTO MUTUO. . . . . . . . . 34
3.16 Vari livelli di sincronizzazione per valori di kx=5, kx=6, e kx=8.ACCOPPIAMENTO UNIDIREZIONALE. . . . . . . . . . . . . 36
3.17 Vari livelli di sincronizzazione per valori di ky=0.5, ky=2, e ky=5.ACCOPPIAMENTO UNIDIREZIONALE. . . . . . . . . . . . . 37
3.18 Vari livelli di sincronizzazione per valori di kz=0.5, kz=1.8, kz=3e kz=6. ACCOPPIAMENTO UNIDIREZIONALE. . . . . . . . . 38
3.19 Schema utilizzato per ottenere la sincronizzazione impulsiva deidue circuiti di Chua . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.20 PWL utilizzato per modellizzare il diodo di Chua . . . . . . . . . 423.21 Double Scroll che presentano i due circuiti di Chua prima della
sincronizzazione. . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.22 Vari livelli di sincronizzazione per valori di f=100 Hz, f=1 kHz,
e f=10 kHz. SINCRONIZZAZIONE IMPULSIVA. . . . . . . . . 443.23 Vari livelli di sincronizzazione per valori di δ=0.2 , δ=0.6, e δ=0.8.
SINCRONIZZAZIONE IMPULSIVA. . . . . . . . . . . . . . . . . 453.24 Vari livelli di sincronizzazione per valori di θ=0, θ=0.1, θ=1 e
θ=5. LINEARE Z-DRIVEN. . . . . . . . . . . . . . . . . . . . . 473.25 Vari livelli di sincronizzazione per valori di A=0, A=0.1, A=5 e
A=1000. ACCOPPIAMENTO ADATTATIVO. . . . . . . . . . . 503.26 Due circuiti di Chua sottoposti a rumore. . . . . . . . . . . . . . 523.27 Confronto distribuzione errore e andamenti variabili di stato. . . 53
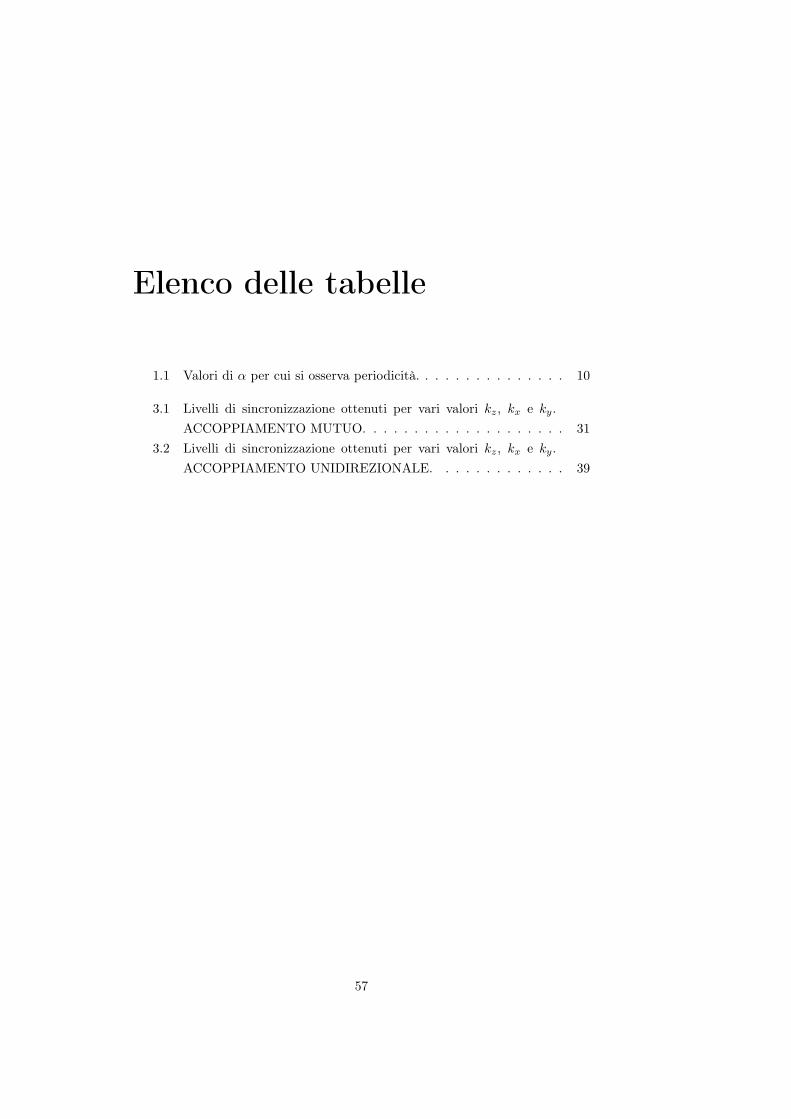
Elenco delle tabelle
1.1 Valori di α per cui si osserva periodicità. . . . . . . . . . . . . . . 10
3.1 Livelli di sincronizzazione ottenuti per vari valori kz, kx e ky.ACCOPPIAMENTO MUTUO. . . . . . . . . . . . . . . . . . . . 31
3.2 Livelli di sincronizzazione ottenuti per vari valori kz, kx e ky.ACCOPPIAMENTO UNIDIREZIONALE. . . . . . . . . . . . . 39
57

58 ELENCO DELLE TABELLE

Bibliografia
[1] Pecora L.M., Carroll T.L. Synchronisation in chaotic systems Phys. Rev.Lett. 1990;64(8):821-4
[2] Wolf A., Swift J., Vastano A., Swinney L. Determining Lyapunov exponentsfrom a Time Series Physica 16D. 1985;16:285-317
[3] T. Y. Li and J. A. Yorke, Period three implies chaos, Amer. Math. Monthly82, 985-992, 1975.
[4] Edward Norton Lorenz. Deterministic nonperiodic flow. Journal ofAtmospheric Sciences. Vol.20 : 130-141
[5] V. I. Oseledec, A multiplicative ergodic theorem. Lyapunov characteristicnumbers for dynamical systems, Trans. Moscow Math. Soc. 19 (1968) 197.
[6] A. Nayfeh and Balanchandra, “Applied Nonlinear Dynamics”, John Wiley,New York, (1994).
[7] L. O. Chua, L. Kocarev, K. Eckert, M.Itoh “Experimental Chaos Synchro-nization in Chua’s Circuits”, Int. J.Bifurcation Chaos, vol.2, pp 705-708,(1992).
[8] B.R .Andrievskii, A.L. Fradkov, “Control of chaos: methods and ap-plications”. Automation and Remote Control, vol. 65, no. 4, 2004, pp.505-533.
[9] S. Boccaletti, C. Grebogi, Y.-C. Lai, H. Mancini, and D. Maza, “The Con-trol of Chaos: Theory and Application”, Physics Reports, vol. 329, 2000,pp. 103-197.
[10] M. R. Naseh, M. Haery “An Adaptative Approach to Synchronization ofTwo Chua’s Circuit’s”, PWaset, vol. 6, 2005, pp. 134-137.
[11] C.W. Wu, L.O. Chua,“A unified framework for synchronization and controlof dynamical system.” Int. J. Bifurcation and Chaos 4(4),979-998, 1994.
59
60 BIBLIOGRAFIA
[12] X.F. Wang, Z.Q Wang,“Synchronization of Chua’s oscillators with the thirdstate as the driving signal” Int. J. Bifurcation and Chaos 8(7) ,1599-1603,1998.
[13] M.P. Kennedy, “Robust OP Amp realization of Chua’s circuit”, Frequenz,vol 46, no. 3-4, pp. 66-80, 1992.
[14] T.Matsumoto, L.O. Chua, “The Double Scroll”, IEEE Transaction oncircuits and systems. vol 32, no.8, 1985.
[15] L.Fortuna, M.Frasca, A.Rizzo, “Experimental pulse synchronisation of twochaotic circuits”, Chaos, Solitons and Fractals, Vol.17, pp.355-361, 2003.
[16] M.Itoh, T.Yang, L.O.Chua, “Experimental study of impulsive synchro-nisation of chaotic and Hyperchaotic Circuits”, International Journal ofBifurcation and Chaos, Vol 9, no.7, pp.1393-1424, 1999.
[17] A.I.Panas, T.Yang, L.O.Chua, “Experimental result of impulsive synchro-nisation between two Chua’s Circuits”, International Journal of Bifurcationand Chaos, Vol 8, no.3, pp.639-644, 1998.
[18] L.O.Chua, L.Pivka, C.W. Wu “A Universal Circuit For Studyng Chao-tic Phenomena”, Philosophical Transactions: Physical Sciences andEngineering, Vol 353,no.1701, pp.65-85, 1995.
[19] G.Q.Zhong, K.T.Ko, K.F.Man “Robustness of synchronization in coupledChua’s Circuits”, IEEE, pp.436-440, 1998.
[20] L.O.Chua, T.S.Parker “Practical Numerical Algorithms for ChaoticSystems”, Springer-Verlag, New York, 1989.
[21] A. Pikovsky, M.Rosenblum, J.Kurths “Synchronization - A UniversalConcept in Nonlinear Science”, Cambridge, 2001.
[22] H.O.Peitgen, H.Jürgens, D.Saupe, “Chaos and Fractals - New Frontiers ofScience”, Springer - 2nd. Ed. - 2004.
[23] S.Wiggins, “Introduction to Applied Nonlinear Dynamical Systems andChaos”, Springer-Verlag - 1990.
[24] S.H.Strogatz, “Nonlinear dynamics and chaos”, Perseus Books - 1994.





























