Embed Size (px)
Citation preview
Switch-and-Navigate:Controlling Data Ferry Mobility for
Delay-Bounded Messages
Switch-and-Navigate:Controlling Data Ferry Mobility for
Delay-Bounded Messages
Liang Ma*, Ting He+, Ananthram Swami§, Kang-won Lee+ and Kin K. Leung*
*Imperial College London, UK+IBM T.J. Watson Research Center, USA
§Army Research Laboratory, USA

2
Introduction
Problem Formulation
Local Control: Navigate
Agenda
2
3
4
5
Global Control: Switch
1
Comparison and Simulation Results
6 Conclusion
3
IntroductionProblem DescriptionGoalMethodContributions
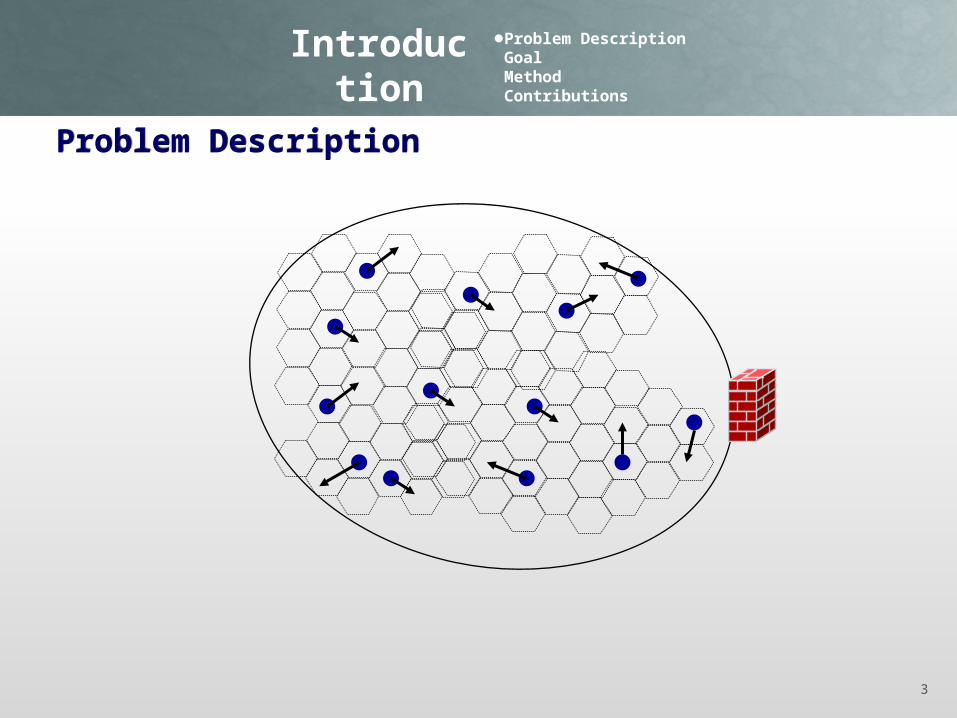
Problem DescriptionProblem Description

4
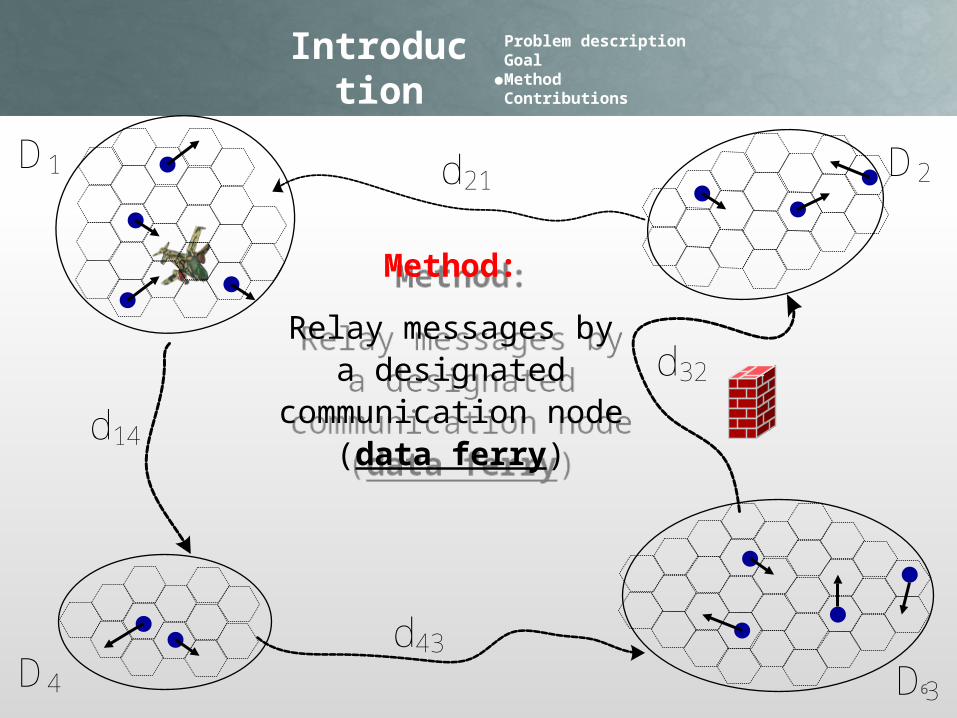
d21D1
D4 D3
D2
d14
d43
d32Permanently partitioned networks
Permanently partitioned networks
IntroductionProblem DescriptionGoalMethodContributions

5
d21D1
D4 D3
D2
d14
d43
d32Goal:
Deliver delay-constrained
messages among disconnected
domains
Goal:
Deliver delay-constrained
messages among disconnected
domains
IntroductionProblem descriptionGoalMethodContributions
6
d21D1
D4 D3
D2
d14
d43
d32
Method:
Relay messages by a designated
communication node (data ferry)
Method:
Relay messages by a designated
communication node (data ferry)
IntroductionProblem descriptionGoalMethodContributions
7
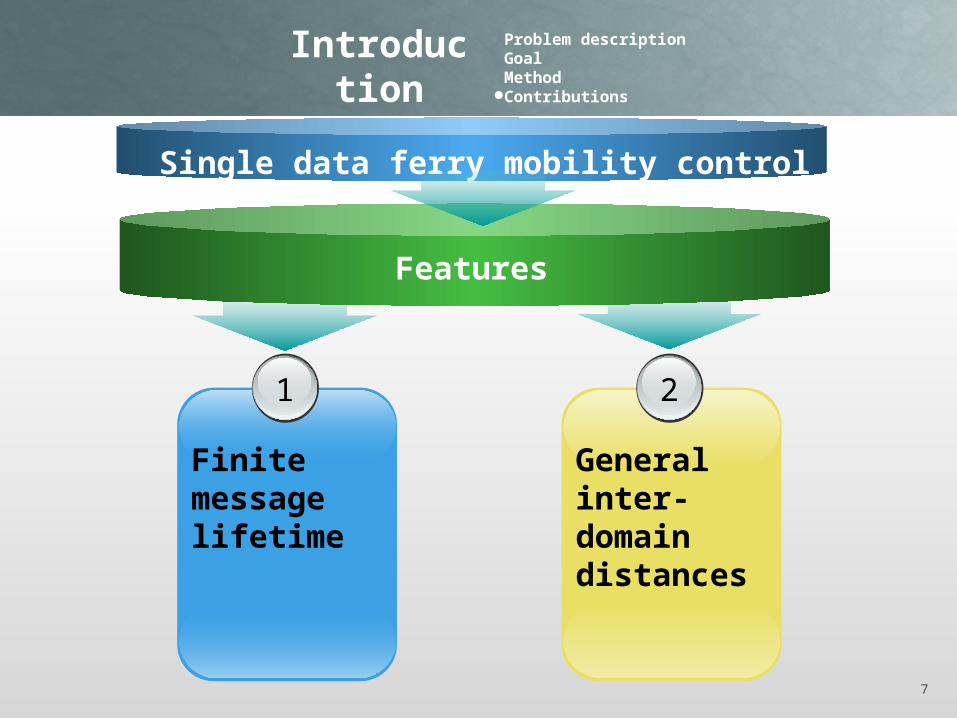
2
General inter-domain distances
Single data ferry mobility control
Features
IntroductionProblem descriptionGoalMethodContributions
1
Finite message lifetime
8
Introduction
Problem Formulation
Local Control: Navigate
Agenda
3
4
5
Global Control: Switch
Comparison and Simulation Results
6 Conclusion
22
1
9
d21D1
D4 D3
D2
d14
d43
d32
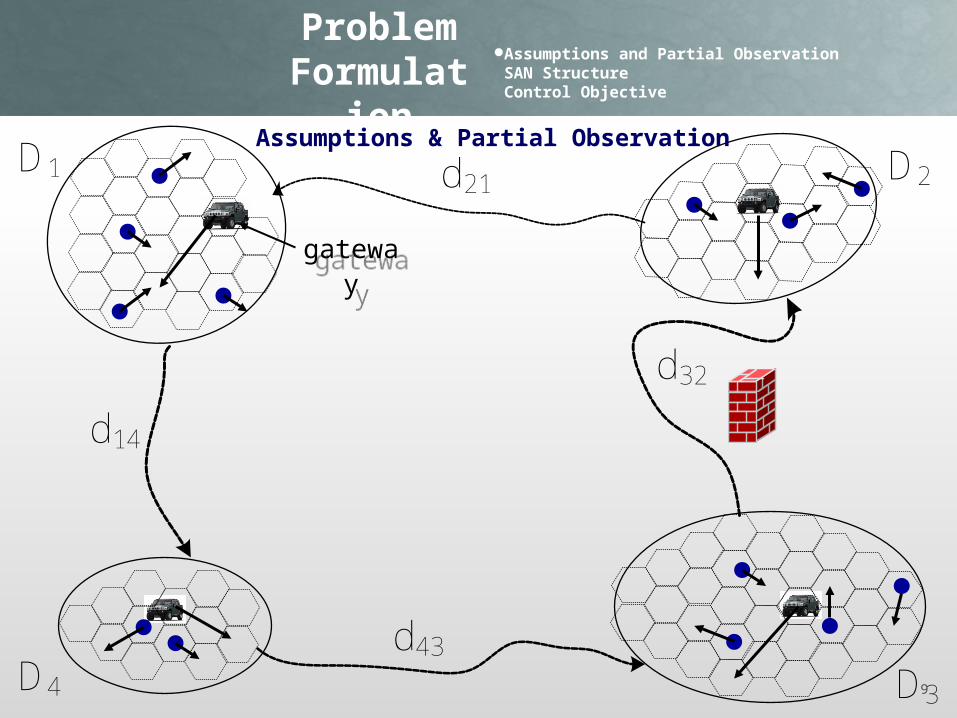
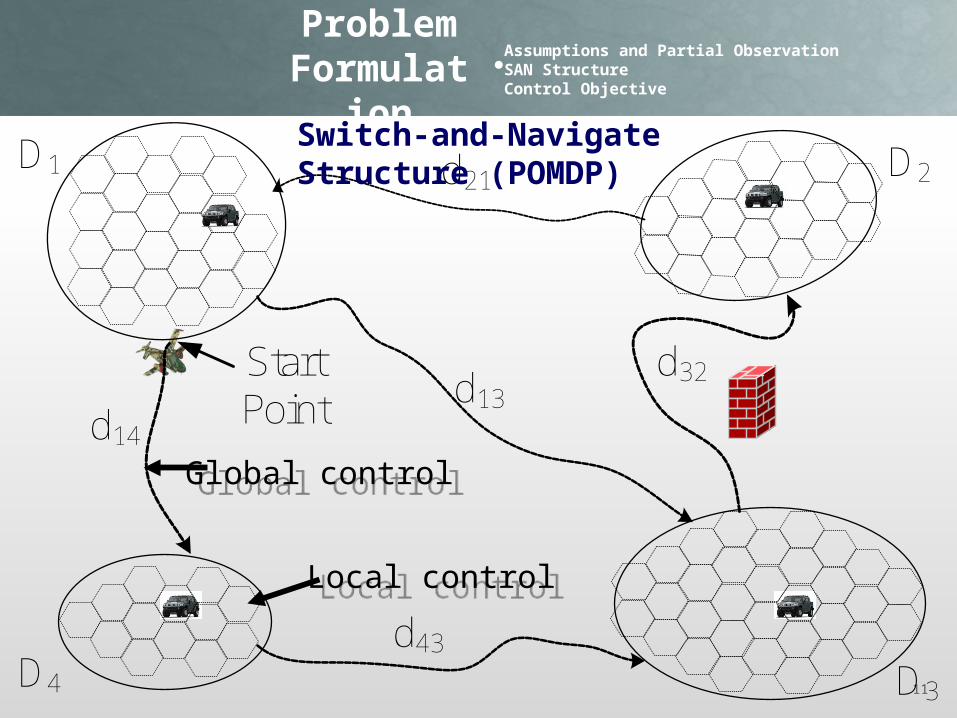
Problem Formulation
Assumptions and Partial ObservationSAN StructureControl Objective
gateway
gateway
Assumptions & Partial Observation
10
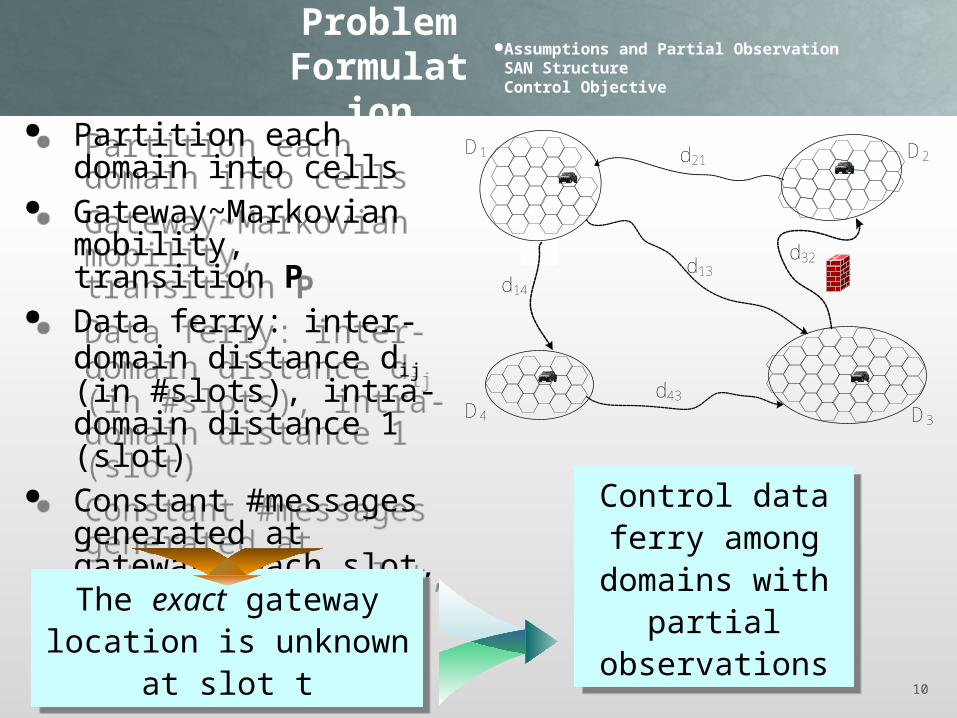
Problem Formulation
Assumptions and Partial ObservationSAN StructureControl Objective
Partition each domain into cells
Gateway~Markovian mobility, transition P
Data ferry: inter-domain distance dij (in #slots), intra-domain distance 1 (slot)
Constant #messages generated at gateways each slot, with finite lifetime lmax
Partition each domain into cells
Gateway~Markovian mobility, transition P
Data ferry: inter-domain distance dij (in #slots), intra-domain distance 1 (slot)
Constant #messages generated at gateways each slot, with finite lifetime lmax
The exact gateway location is unknown at
slot t
The exact gateway location is unknown at
slot t
Control data ferry among domains with
partial observations
Control data ferry among domains with
partial observations
d21D1
D4 D3
D2
d14
d43
d32d13
11
d21D1
D4 D3
D2
d14
d43
d32Start Point d13
Global controlGlobal control
Local controlLocal control
Problem Formulation
Assumptions and Partial ObservationSAN StructureControl Objective
Switch-and-Navigate Structure (POMDP)
12
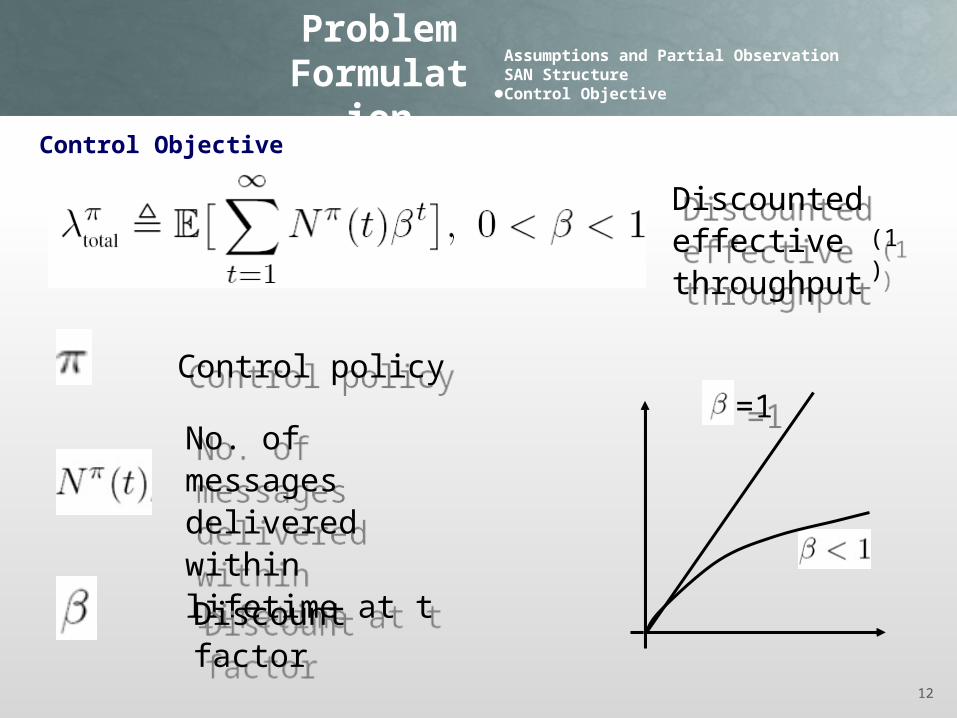
=1=1Control policyControl policy
No. of messages delivered within lifetime at t
No. of messages delivered within lifetime at t
Discount factorDiscount factor
Discounted effective throughput
Discounted effective throughput
Problem Formulation
Assumptions and Partial ObservationSAN StructureControl Objective
Control Objective
(1)(1)

13
Introduction
Problem Formulation
Local Control: Navigate
Agenda
2
4
5
Global Control: Switch
Comparison and Simulation Results
6 Conclusion
3
1
14
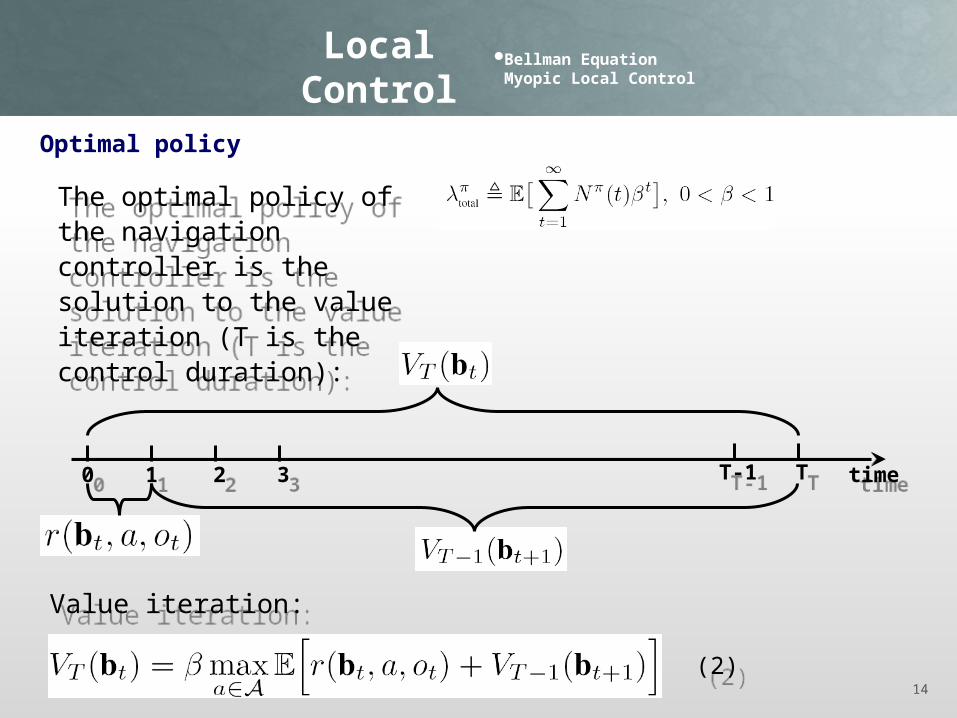
Local Control Bellman EquationMyopic Local Control
The optimal policy of the navigation controller is the solution to the value iteration (T is the control duration):
The optimal policy of the navigation controller is the solution to the value iteration (T is the control duration):
00 11 22 33 T-1T-1 TTtime
time
Value iteration:Value iteration:
(2)(2)
Optimal policy

15
Local Control Bellman EquationMyopic Local Control
Distribution of gateway location (belief b) is updated every slot
Distribution of gateway location (belief b) is updated every slot
Until the gateway is finally foundUntil the gateway is finally found
Suppose the data ferry knows the transition matrix Pq in each domain
Suppose the data ferry knows the transition matrix Pq in each domain
(3)(3)
Myopic Local Policy (T=1)
16
Introduction
Problem Formulation
Local Control: Navigate
Agenda
2
3
5
Global Control: Switch
Comparison and Simulation Results
6 Conclusion
4
1

17
D1D2
D3
D4
d14d13
d21
d43
d32obstacle
t t+1action...
switch...
one round
Global Control
Buffer States UpdateMyopic Global PolicyTwo-step Global PolicyApproximations
Gateway buffer state G
Gateway buffer state G Ferry buffer state
F
Ferry buffer state F
G11 G12 G13 … G1(L-1) G1L
G21 G22 G23 … G2(L-1) G2L
G31 G32 G33 … G3(L-1) G3L
G41 G42 G43 … G4(L-1) G4L
F11 F12 F13 … F1(L-1) F1L
F21 F22 F23 … F2(L-1) F2L
F31 F32 F33 … F3(L-1) G3L
F41 F42 F43 … F4(L-1) G4L
0
0
0
0
0
0
0
0
duration between 2 consecutive contacts is a round
duration between 2 consecutive contacts is a round
Before observationBefore observation
Global Control: Selecting the next domain to serve
18
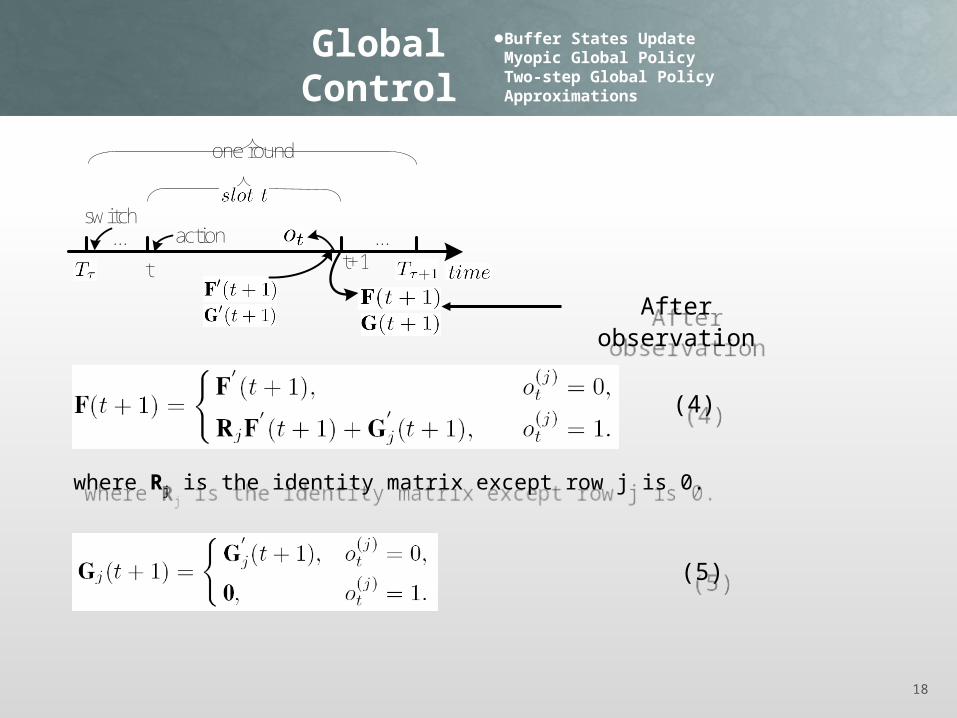
Global Control
Buffer States UpdateMyopic Global PolicyTwo-step Global PolicyApproximations
t t+1action...
switch...
one round
where Rj is the identity matrix except row j is 0.where Rj is the identity matrix except row j is 0.
(4)(4)
(5)(5)
After observationAfter observation

19
Global Control
Buffer States UpdateMyopic Global PolicyTwo-step Global PolicyApproximations
Value Iteration for Global ControlValue Iteration for Global Control
where denotes the no. of delivered messages when a contact occurs, is the First Contact Time in domain j, is the total no. of rounds in the global control,
where denotes the no. of delivered messages when a contact occurs, is the First Contact Time in domain j, is the total no. of rounds in the global control,
t t+1action...
switch...
current round Future roundsFuture rounds
(8)(8)
Myopic Global Policy
(7)(7)
=1=1
20
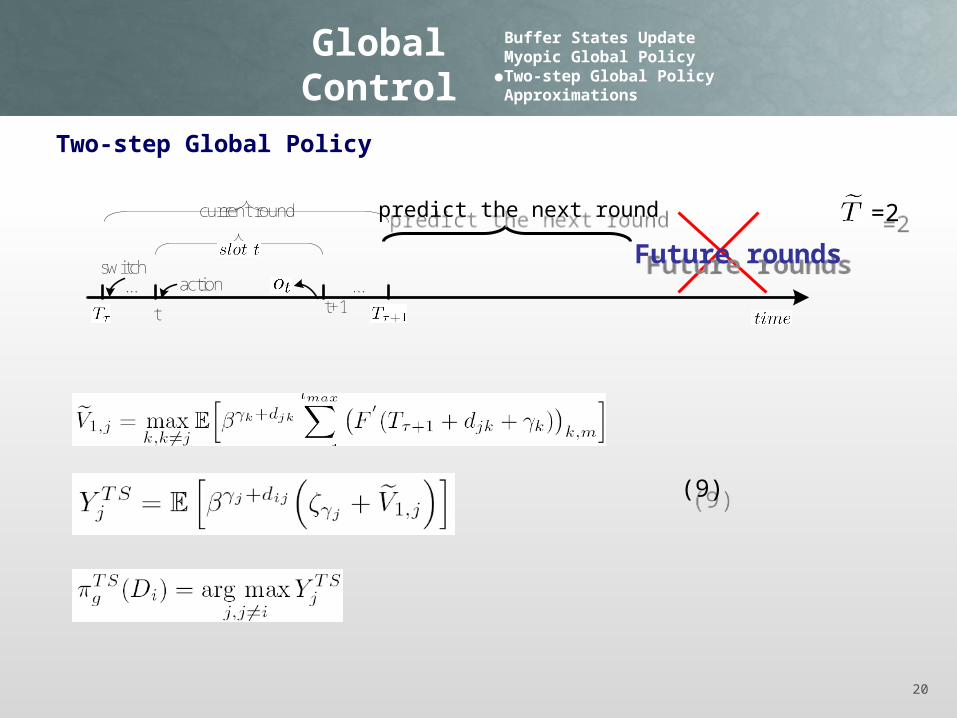
Global Control
Buffer States UpdateMyopic Global PolicyTwo-step Global PolicyApproximations
Future roundsFuture rounds
t t+1action...
switch...
current round predict the next roundpredict the next round
(9)(9)
Two-step Global Policy
=2=2
21
Global Control
Buffer States UpdateMyopic Global PolicyTwo-step Global PolicyApproximations
For computational efficiency, Approximate the belief by the steady-state distribution Approximate the First Contact Time (FCT) by the average FCT
Original policies:
MY: Myopic policy
TS: Two-step policy
Steady-state-based approximations:
S-MY: Steady-state based myopic
S-TS: Steady-state based two-step policy
Further approximations:
S-TSA2: Average FCT is used in the 2nd step
S-TSA1,2: Average FCT is used in both steps
Approximations of Global Policies
22
Introduction
Problem Formulation
Local Control: Navigate
Agenda
2
3
4 Global Control: Switch
Comparison and Simulation Results
6 Conclusion
55
1
23
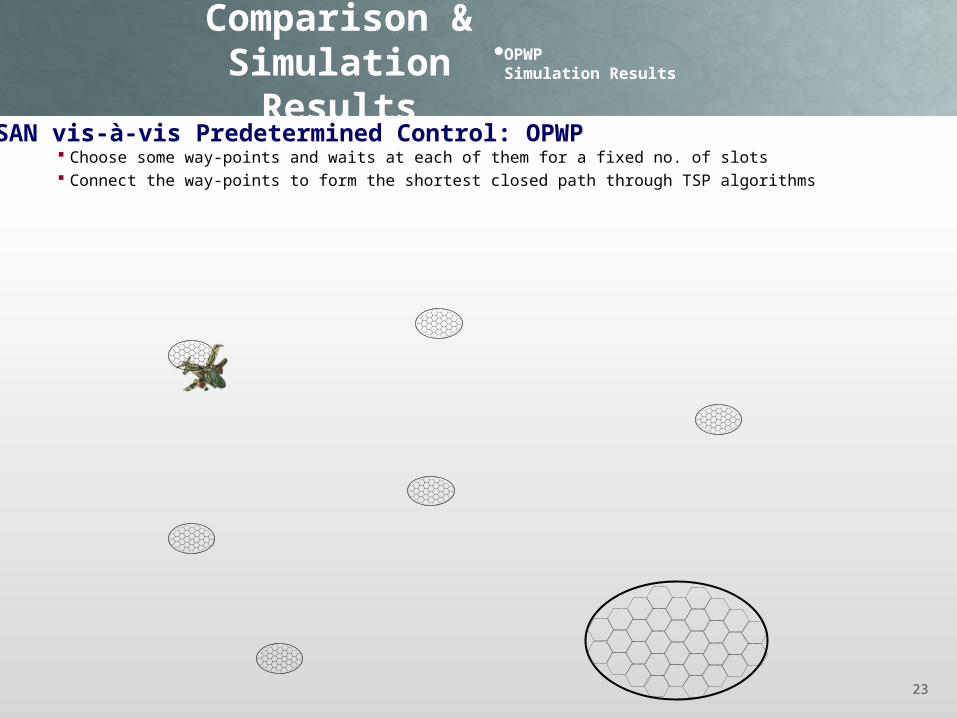
Choose some way-points and waits at each of them for a fixed no. of slots Connect the way-points to form the shortest closed path through TSP algorithms
Comparison & Simulation Results
OPWPSimulation Results
SAN vis-à-vis Predetermined Control: OPWP
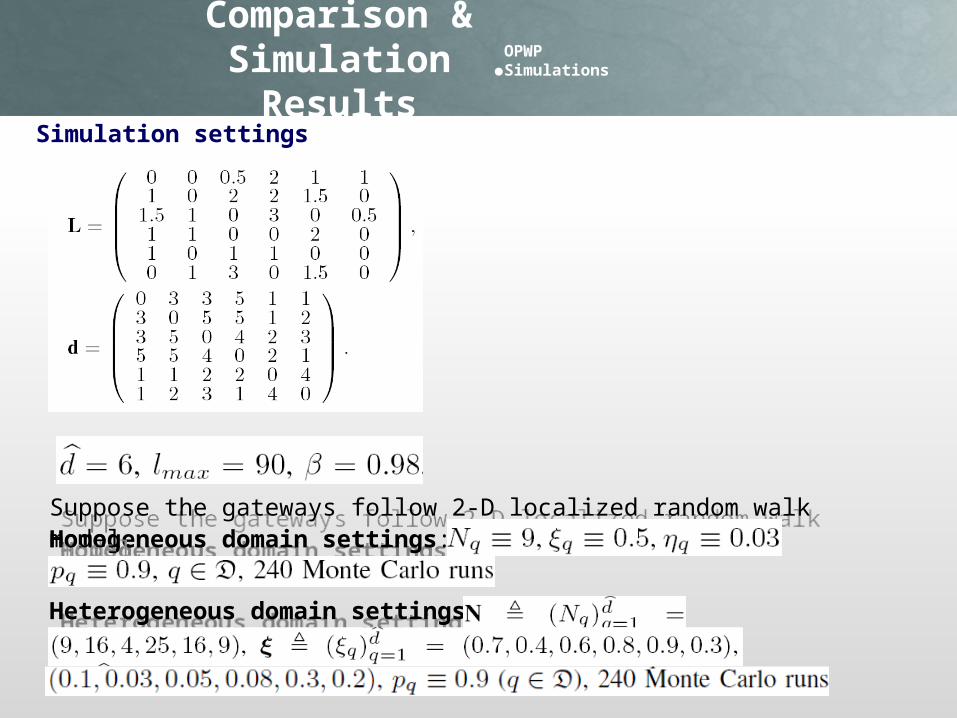
Homogeneous domain settings:Homogeneous domain settings:
Heterogeneous domain settings:Heterogeneous domain settings:
Comparison & Simulation Results
OPWPSimulations
Suppose the gateways follow 2-D localized random walk model.Suppose the gateways follow 2-D localized random walk model.
Simulation settings
25
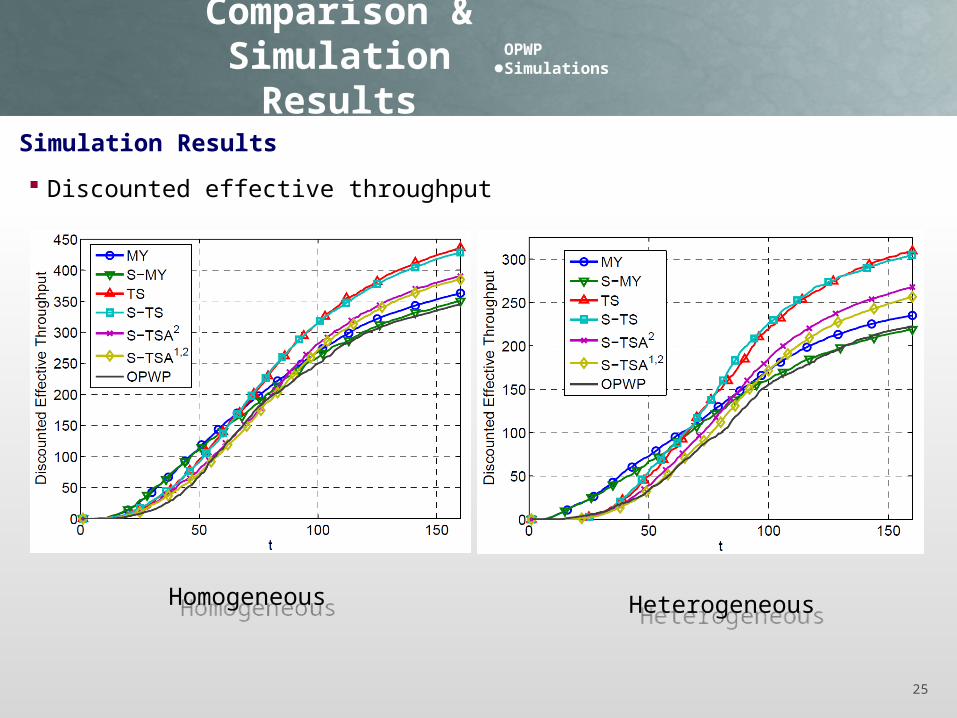
Discounted effective throughput
Comparison & Simulation Results
OPWPSimulations
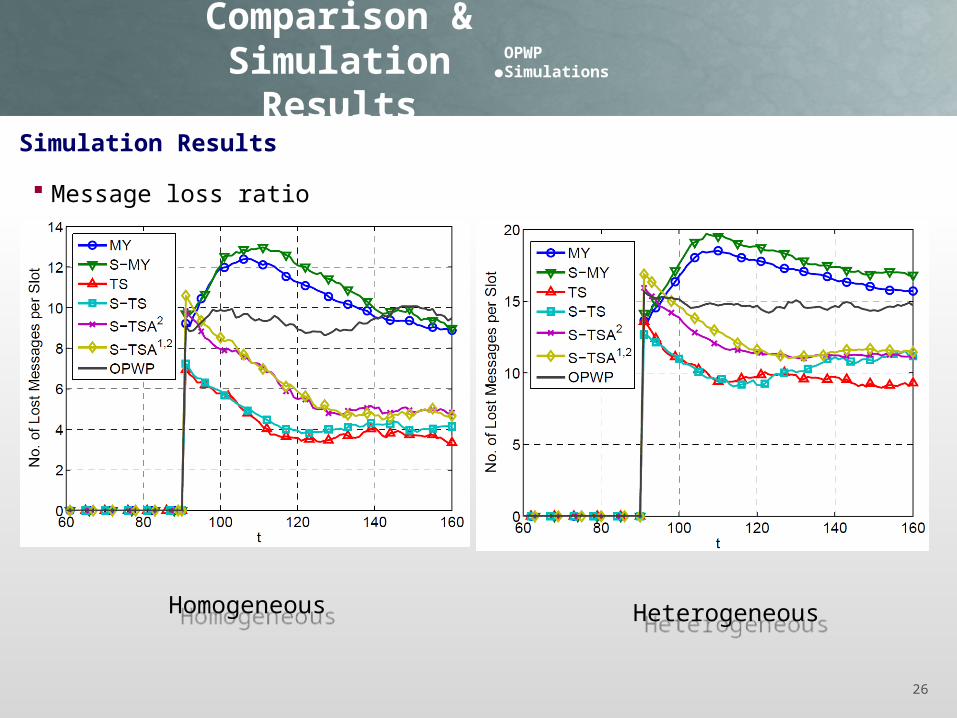
HomogeneousHomogeneousHeterogeneousHeterogeneous
Simulation Results
26
Message loss ratio
Comparison & Simulation Results
OPWPSimulations
HomogeneousHomogeneousHeterogeneousHeterogeneous
Simulation Results
27
Introduction
Problem Formulation
Local Control: Navigate
Agenda
2
3
4
5
Global Control: Switch
Comparison and Simulation Results
Conclusion66
1

28
Consider more practical constraints (constrained message delays, general inter-domain distances)
Consider more practical constraints (constrained message delays, general inter-domain distances)
Propose a hierarchical framework for controlling data ferry in highly partitioned networks
Propose a hierarchical framework for controlling data ferry in highly partitioned networks
The two-step policies and the approximations outperform the state of the art (optimized predetermined policy)
The two-step policies and the approximations outperform the state of the art (optimized predetermined policy)
Conclusions

29
Thank you!
Q & A

30
Choose some way-points and waits at each of them for a fixed no. of slots Connect the way-points to form the shortest closed path through TSP algorithms
Comparison & Simulation Results
OPWPSimulation Results
SAN vis-à-vis Predetermined Control: OPWP