Embed Size (px)
Citation preview

SVN-49 Signal Anomaly
Presented by Tom Stansell
GPSW POC: Lt. Col. James Lake, Ph.D.

2
DraftIntroduction
• GPS IIR-20, SVN-49 (PRN 01), carries an L5 Demonstration Payload – The L5 signal was not for operational use– The intent was to “bring L5 into use” for ITU purposes
• The demonstration payload made use of an Auxiliary Payload port on the spacecraft
• No impact on the L1 and L2 signals was intended or expected
• However, 2SOPS and Aerospace reported unusually high and elevation angle dependent Pseudo Range Residuals (PRR) from the monitor stations

3
DraftPseudorange Residuals
• Ionospheric refraction corrected pseudoranges• Relative to a “best fit” orbit determined early in the test program• Roughly a 4+ meter spread from 10 to 80 degrees

4
DraftGPS IIR Antenna Farm
L-Band Antenna Array with 12
Helical Antennas

5
DraftL-Band Antenna Element Locations
Outer Ring
Inner Ring

6
Draft
Outer Ring Inner Ring
L5 Filter162 In. Cable
Antenna Coupler Network

7
DraftJ1 and J2 Antenna Patterns at L1
0
2
4
6
8
10
12
14
16
18
20
22
24
0 10 20 30 40 50 60 70 80 90
Elevation Angle (deg)
L1
Ga
inl (
dB
)
J1 Signal Gain
J2 Signal Gain
Range Measurement Data

8
DraftReflected Relative to Direct L1 Signal Power
-40
-38
-36
-34
-32
-30
-28
-26
-24
-22
-20
-18
-16
-14
-12
0 10 20 30 40 50 60 70 80 90
Elevation Angle (deg)
L1
De
lay
ed
to
Dir
ec
t S
ign
al D
iffe
ren
ce
(d
B)
Reflected to Direct Signal Power Ratio
Range Measurement Data

9
DraftModel of L1 Signal Difference
-40
-38
-36
-34
-32
-30
-28
-26
-24
-22
-20
-18
-16
-14
-12
0 10 20 30 40 50 60 70 80 90
Elevation Angle (deg)
L1
De
lay
ed
to
Dir
ec
t S
ign
al D
iffe
ren
ce
(d
B)
Interpreted Power Difference
Delayed Signal Polarity Reversal

10
DraftEarly Minus Late Tracking
Effect of Half Voltage Amplitude Multipath Signal - C/A Code Scale
-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0.25
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5
Multipath Delay (C/A Code Chips)
Pseu
do
ran
ge E
rro
r (C
/A C
od
e C
hip
s)
C/A Code, Wide Correlator
C/A Code, 0.1 Narrow Correlator
293 MP Code Correlator
Max Code Error w/Opposite Polarity
Max Code Error w/Same Polarity

11
DraftIonospheric Refraction Calculation
2
2
2 2
2 2 2 21 2
1 2
2 2
1/ 2 1575.42 /1227.6 77 / 60
77 5929
60 3600
77 60 2329
( 77 60 ) /(77 60 )
2.55 1.55
2.55 1.55 2.984.... 3
L L
L L
L L
PR PR PR
PR PR PR
Ionospheric correction amplifies code noise

12
DraftMax Impact on L1 P(Y) Autocorrelation
0.0
0.2
0.4
0.6
0.8
1.0
1.2
-30 -25 -20 -15 -10 -5 0 5 10 15 20 25 30 35 40
Pseudorange (meters)
L1
P(Y
) A
uto
co
rre
lati
on
Sum of the Two
P(Y) Autocorrelation
30 nsec Delay

13
DraftEarly Minus Late L1 P(Y) Code Track Error
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
-14 -12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12 14
Pseudorange (meters)
Ea
rly
Min
us
La
te E
rro
r F
un
cti
on
Wide Dif
Narrow Dif
Narrow Sum
Wide Sum
1.62 m offset x 2.55 = 4.14 m error
Same Phase
Opposite Phase
Iono Correction Factor

14
DraftUseful Observation
• Receivers with early minus late correlators having similar spacing will have essentially the same tracking error for all signals at one frequency – e.g., L1 P(Y) and L1 C/A exhibit the same error
• However, different types of correlators and different correlator spacings very likely will produce different tracking errors– See next slide with figures from 13 July ’09 GPS World Article

15
DraftTracking Error with Different Correlators
L1 Typical Semi-Codeless Correlator
L2 Typical Semi-Codeless Correlator
L1 Using Multipath Mitigation w/ 20 nanosecond correlator spacing
L2 Using Multipath Mitigation w/ 20 nanosecond correlator spacing
Figures courtesy of GPS World, receivers are JAVAD GNSS Triumph receivers

16
DraftJ1 and J2 Antenna Patterns at L2
0
2
4
6
8
10
12
14
16
18
20
22
24
0 10 20 30 40 50 60 70 80 90
Elevation Angle (deg)
Ga
inl (
dB
)
L2 J1 Signal Gain
L2 J2 Signal Gain
Range Measurement Data

17
DraftModel of L2 Signal Difference
-50
-48
-46
-44
-42
-40
-38
-36
-34
-32
-30
-28
-26
-24
-22
-20
-18
-16
0 10 20 30 40 50 60 70 80 90
Elevation Angle (deg)
L2
De
lay
ed
to
Dir
ec
t S
ign
al D
iffe
ren
ce
(d
B)
Interpreted Power Difference
Delayed Signal Polarity Reversal

18
DraftEarly Minus Late L2 P(Y) Code Track Error
Same Phase
Opposite Phase
Iono Correction Factor
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
-14 -12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12 14
Pseudorange (meters)
Ea
rly
Min
us
La
te E
rro
r F
un
cti
on
Wide Dif
Narrow Dif
Narrow Sum
Wide Sum
~.95 m offset x 1.55 = 1.48 m error~1.1 m offset x 1.55 = 1.69 m error

19
DraftRefraction Corrected Error Possibilities
• Assume the direct and reflected L1 signals are in phase so at zenith the L1 pseudorange is 1.62 m too long
• If the direct and reflected L2 signals are in quadrature, the L2 pseudorange error is negligible
• Therefore, the refraction corrected pseudorange error is (2.55 x 1.62 – 1.55 x 0) = 4.14 m
• If the direct and reflected L2 signals are in the same phase, the L2 pseudorange error is ~0.95 m
• Therefore, the refraction corrected pseudorange error is (2.55 x 1.62 – 1.55 x 0.95) = 2.66 m
• If the direct and reflected L2 signals are in opposite phase, the L2 pseudorange error is ~ -1.1 m
• Therefore, the refraction corrected pseudorange error is (2.55 x 1.62 – 1.55 x –1.1) = 5.84 m

20
DraftPseudorange Error Model
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
6.0
0 10 20 30 40 50 60 70 80 90
Elevation Angle (deg)
Ma
x P
se
ud
ora
ng
e E
rro
r (m
)
Iono w/ L2 direct and delayed opposed
L2
L1Iono w/ L2 direct and delayed aligned
Iono w/ L2 direct and delayed in quadrature

21
DraftCurves and Residuals Overlay

22
DraftA Partial Fix
• In order to reduce the elevation-dependent tracking residuals, 2SOPS has experimented with placing the antenna phase center about 152 meters above the satellite rather than slightly below as normal– (How can you fix a 4-5 meter problem with a 152 meter solution?)
• The Kalman filter then provides orbit and clock parameters which best fit the tracking data– The key parameter is clock offset
• Over the next few weeks, different values will be tried and transmitted in the NAV messages

23
DraftRaise the Orbit, Offset the Clock
• If Rs effective = Rs +
• The impact on pseudorange is cos(b)
• The following plot shows the effect of = 152.586 m with a clock offset of 496.2 nsec (148.754 m)
Rs =26578
Re =6378
Xr = Re Sin(a)Yr = Re cos(a)
a
bb = atan(Xr/(Rs - Yr))
El
Sin(90+El)/Rs = Sin(b)/Re
Cos(El)/Rs = Sin(b)/Re
El = acos(Rs Sin(b)/Re)
Rs ~ 26,560,601 meters
Re ~ 6,378,137 meters at equator

24
DraftNet Compensation
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
0 10 20 30 40 50 60 70 80 90
Elevation Angle (deg)
Ps
eu
do
ran
ge
Co
rre
cti
on
(m
)
- Antenna Phase Center 152.586 m above SV- Clock offset 496.2 nsec or 148.754 m
25
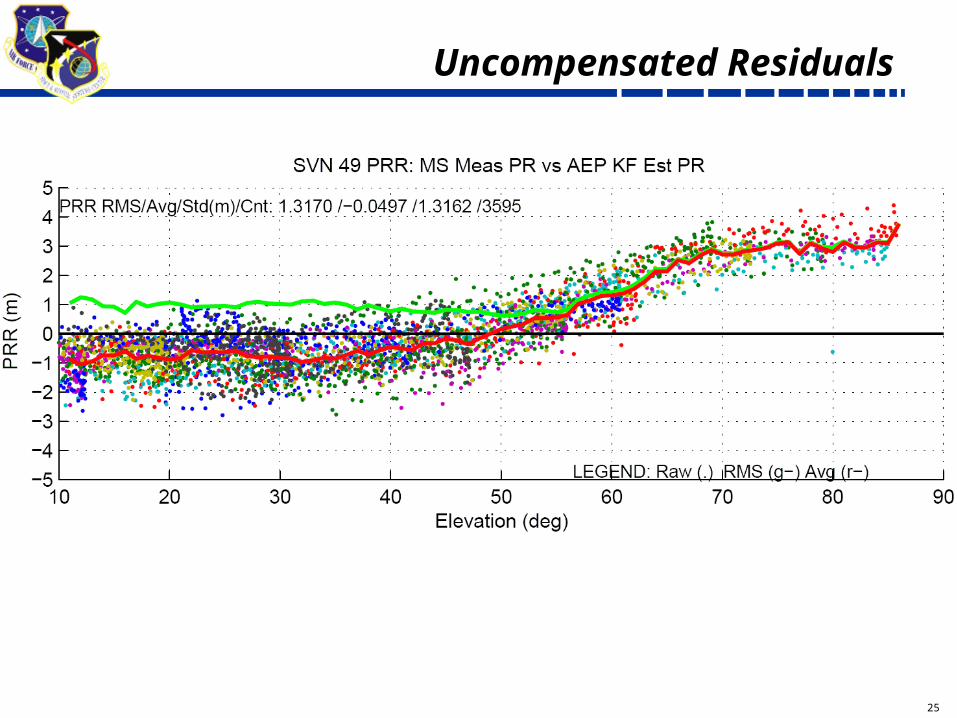
DraftUncompensated Residuals

26
DraftCompensated Residuals

27
DraftCompare Compensation with Error Models
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
6.0
0 10 20 30 40 50 60 70 80 90
Elevation Angle (deg)
Ma
x P
se
ud
ora
ng
e E
rro
r (m
)
Iono w/ L2 direct and delayed opposed
L2
L1Iono w/ L2 direct and delayed aligned
Iono w/ L2 direct and delayed in quadrature
Orbit and Clock Compensation

28
DraftSpirent Simulation
• Note for organizations with a Spirent simulator– Spirent is preparing a scenario, based on these models, to simulate
the SVN-49 problem and enable laboratory testing– The scenario provides normal L1 and L2 signals plus a delayed
signal with the proper relative amplitude and phase relationships as a function of elevation angle in accordance with these models
– Several parameters can be modified by the operator– The scenario will available directly from Spirent by request





























