Embed Size (px)
Citation preview

SVEUČILIŠTE U RIJECI
TEHNIČKI FAKULTET
Diplomski sveučilišni studij brodogradnje
DIPLOMSKI RAD
PROCJENA ZNAČAJKI POLJA SUSTRUJANJA MODELA
BRODA PRIMJENOM NUMERIČKE SIMULACIJE
VISKOZNOG STRUJANJA
Rijeka, rujan 2017. Andro Bakica
002309270

SVEUČILIŠTE U RIJECI
TEHNIČKI FAKULTET
Diplomski sveučilišni studij brodogradnje
DIPLOMSKI RAD
PROCJENA ZNAČAJKI POLJA SUSTRUJANJA MODELA
BRODA PRIMJENOM NUMERIČKE SIMULACIJE
VISKOZNOG STRUJANJA
Mentor: Prof. dr. sc. Roko Dejhalla
Komentorica: Doc. dr. sc. Dunja Legović
Rijeka, rujan 2017. Andro Bakica
002309270
0
Izjavljujem da sam ovaj rad izradio samostalno koristeći navedenu literaturu i
znanja stečena tijekom studija.
Zahvaljujem se prije svega mentoru prof. dr. sc. Roku Dejhalli što mi je povratio
interes za hidrodinamiku broda tijekom mog diplomskog studija te na ukazanom
povjerenju pri zadavanju teme rada. TakoĎer, zahvaljujem se prof. dr. sc. Hrvoji
Jasaku koji mi je omogućio da budem dio CFD grupe na Fakultetu strojarstva i
brodogradnje u Zagrebu pri izradi rada. Zahvaljujem se i doc. dr. sc. Vuki
Vukčeviću na velikoj pomoći pri razjašnjavanju teorijskog dijela rada. Za kraj,
zahvaljujem se mag.ing. Innu Gatinu na neizmjernoj praktičnoj i teorijskoj potpori
te velikom broju savjeta koji su doveli ovaj rad do ţeljene forme.
I
SADRŽAJ
1. UVOD ....................................................................................................................................................... 1
2. MATEMATIČKI MODEL ....................................................................................................................... 2
2.1 Newtonovski fluid .......................................................................................................................... 2
2.2 Jednadţba očuvanja mase .............................................................................................................. 3
2.3 Navier – Stokesove jednadţbe ....................................................................................................... 3
2.4 Rubni uvjeti .................................................................................................................................... 4
2.5 „Volume of Fluid“ metoda ............................................................................................................. 5
2.5.1 Kinematički rubni uvjet ................................................................................................................ 6
2.5.2 Dinamički rubni uvjet................................................................................................................... 7
2.5 Turbulentno strujanje ................................................................................................................... 10
2.5.1 model turbulencije ................................................................................................... 12
2.5.2 Zidne funkcije (engl.„wall functions“) ....................................................................................... 14
2.6 Relaksacijske zone ....................................................................................................................... 16
3. DISKRETIZACIJA MATEMATIČKOG MODELA ............................................................................. 17
3.1 Diskretizacija prostora ................................................................................................................. 17
3.2 Diskretizacija standardne transportne jednadţbe ......................................................................... 18
3.2.1 Diskretizacija nestacionarnog člana ........................................................................................... 19
3.2.2 Diskretizacija gradijenta metodom najmanjih kvadrata ............................................................. 20
3.2.3 Diskretizacija konvekcijskog člana ............................................................................................ 20
3.2.4. Diskretizacija difuznog člana .................................................................................................... 22
3.2.5 Diskretizacija izvorskog člana ................................................................................................... 23
3.2.6 Diskretizirana standardna transportna jednadţba ....................................................................... 24
3.2.7 Numerički rubni uvjeti ............................................................................................................... 24
3.3 Diskretizacija matematičkog modela optjecanja plovnog objekta ............................................... 25
3.3.1 Navier – Stokes jednadţbe ......................................................................................................... 25
3.3.2 Jednadţba očuvanja mase ........................................................................................................... 26
3.3.3 Diskretizacija jednadţbe tlaka .................................................................................................... 27
3.3.4 Diskretizacija indikatorske funkcije ........................................................................................... 30
3.4 Rješavanje sustava diskretiziranih jednadţbi ............................................................................... 32
3.4.1 Linearni rješavači ....................................................................................................................... 32
3.4.2 Kombinacija SIMPLE i PISO algoritma rješavanja ................................................................... 36
4. PROVEDBA SIMULACIJE ................................................................................................................... 39
4.1 Struktura OpenFOAM-a .............................................................................................................. 39
4.2 Predprocesor ................................................................................................................................ 40
II
4.2.1 Priprema geometrije trupa .......................................................................................................... 40
4.2.2 Izrada mreţe konačnih volumena ............................................................................................... 43
4.3 Procesor ........................................................................................................................................ 53
4.4 Postprocesor ................................................................................................................................. 58
4.4.1 Sila otpora .................................................................................................................................. 58
4.4.2 Valne elevacije ........................................................................................................................... 61
4.4.3 Značajke polja sustrujanja .......................................................................................................... 64
5. Zaključak ................................................................................................................................................. 76
LITERATURA ............................................................................................................................................ 78
SAŢETAK .................................................................................................................................................. 80
SUMMARY ................................................................................................................................................ 81
POPIS SLIKA ............................................................................................................................................. 82
POPIS TABLICA........................................................................................................................................ 84
1
1. UVOD
Pri projektiranju plovnog objekta jedna od najvaţnijih značajki uz nosivost je ispunjavanje
ugovorne brzine broda na pokusnoj plovidbi. Postizanje prihvatljive brzine broda temelji se na
točnoj procjeni otpora i potrebne propulzije što je nemoguće bez odreĎivanja značajki strujanja
oko trupa broda.
Iako postoje razne empirijsko-statističke metode procjene otpora (Holtrop, Hollenbach,
Hughes...) [1] koje se temelje na eksperimentalnim rezultatima, njihov nedostatak je što se
odnose samo za odreĎene tipove formi brodova, a korištenje navedenih metoda je poprilično
ovisno o iskustvu samog projektanta. U brodograĎevnoj struci već se odavno koriste metode
potencijalnog strujanja, ali zbog jakog utjecaja viskoznih sila u odreĎenim slučajevima
jednostavno nisu dostatne. Procjena strujanja oko broda primjenom metode računalne dinamike
fluida jedina pruţa se mogućnost primjene na bilo kakvu formu te bez zanemarivanja učinka
viskoznih sila. Prednosti su očite: ušteda novca i vremena. Vaţno je napomenuti da se najveći
problem računarske dinamike fluida nalazi u samom korisniku. Dva korisnika sa istim alatom u
mogućnosti su dobiti potpuno različita rješenja čime se problem ponovno vraća na samog
projektanta i iskustvo.
U današnje vrijeme brodogradilišta se sve više okreću računalnoj dinamici fluida u svrhu
optimizacije forme ili pri izradi idejnog projekta u predprojektnoj fazi, ali još uvijek konačna
procjena valjanosti obavezno dolazi kroz eksperimente.
U ovom radu, najviše paţnje pridodaje se značajkama polja sustrujanja na mjestu gdje će
se ugraditi brodski vijak. Vrlo je vaţno znati oblik polja sustrujanja kako bi se moglo procjeniti u
kakvim će okolnostima vijak raditi kako bi se moglo predvidjeti silu poriva koju će proizvoditi.
Rad se sastoji od prvog dijela u kojem su opisane matematičke parcijalne diferencijalne
jednadţbe strujanja fluida iz kojih proizlazi numerički model. U drugom dijelu opisana je
diskretizacija sustava metodom konačnih volumena i numeričke sheme. Treći dio sastoji se od
opisa strukture programskog paketa OpenFOAM te detaljnog opisa provoĎenja simulacije, a
uključuje i prikaz dobivenih rezultata te usporedbu s eksperimentalnim podacima.

2
2. MATEMATIČKI MODEL
Optjecanje plovnog objekta se smatra nestlačivim (ρ=konst.) i izotermnim (T=konst.) procesom,
a fluid se smatra njutnovskim. Matematički model temelji se na jednadţbi očuvanja mase,
Navier-Stokesovim jednadţbama i jednaţbi indikatorske funkcije koritštene za VOF (engl.
„Volume of Fluid“) metodu. Navedene jednadţbe nemaju analitička rješenja, ali se ono moţe
aproksimirati iterativnom numeričkom metodom. Strujanje se smatra turbulentnim, a izabran je
k-ω SST (engl. “Shear Stress Transport“) model turbulencije.
2.1 Njutnovski fluid
Prema [2]: „Elastična tijela se pod djelovanjem vanjskog opterećenja deformiraju, a uslijed
deformacije u tijelu se pojavljuju unutrašnje sile (naprezanja) koja uravnoteţuju vanjska
opterećenja, pa se za elastična tijela kaţe da se opiru vanjskom opterećenju deformacijom.“
Fluid se vanjskim smičnim silama odupire viskoznim naprezanjima i neprekidno se deformira, a
kako je pri većem vanjskom opterećenju deformacija brţa smatra se da se fluid vanjskom
opterećenju odupire brzinom deformacije.
U njutnovskim fluidima su viskozna naprezanja linearno razmjerna brzini deformacije fluida. U
slučaju izotropnog (jednaka mehanička svojstva u svim smjerovima) i nestlačivog fluida
jednadţba glasi:
, ( 1 )
, ( 2 )
gdje je:
tenzor brzine deformacije (s-1
),
simetrični tenzor viskoznog naprezanja (N/m2),
koeficijent razmjernosti ili dinamička viskoznost (Ns/m2),
brzina u smjeru osi (m/s),
derivacija komponente brzine s obzirom na okomitu os (s
-1).
Valja napomenuti da jednadţba ima ovakav oblik isključivo zbog pretpostavljene nepromjenjive
gustoće tj. nema promjene volumena čestice fluida u strujanju iz čega proizlazi da su dijagonalni
elementi tenzora jednaki nuli:
div . ( 3 )

3
2.2 Jednadžba očuvanja mase
Prema zakonu o očuvanju mase ([2]) vrijedi:
( ) . ( 4 )
MeĎutim, ako se radi o nestlačivom strujanju i uz (2) jednadţba prelazi u oblik:
. ( 5 )
Riječima [2]: „Brzina promjene mase u materijalnom volumenu je jednaka nuli.“
2.3 Navier – Stokesove jednadžbe
Navier – Stokesove jednadţbe ili jednadţba očuvanja količine gibanja prema [2] glasi: „Brzina
promjene količine gibanja materijalnog volumena jednaka je sumi vanjskih masenih i
površinskih sila koje djeluju na materijalni volumen.“
Matematički zapis za slučaj nestlačivog strujanja uz = konst. glasi:
. ( 6 )
Ako se cijela jednadţba podijeli s gustoćom dobije se prepoznatljivi oblik:
, ( 7 )
gdje je:
nestacionarni član (m/s
2) – opisuje akceleraciju kao vremensku promjenu brzine,
konvektivni član (m/s
2) – opisuje utjecaj povezan s promjenom brzine u prostoru,
specifična masena sila (m/s2) – gravitacijsko ubrzanje za slučaj optjecanja broda,
gradijent tlaka (m/s
2),
koeficijent kinematičke viskoznosti (m2/s),
difuzijski član – proizlazi iz pretpostavke Newtonovskog fluida (m/s
2),
4
tlak podijeljen s gustoćom (m
2/s
2),
tlak (Pa).
S obzirom da postoje četiri nepoznanice (komponente vektora brzine i tlak), a postoje tri
jednadţbe za (7) te jednadţba zakona očuvanja mase (5) sustav je zatvoren. Prva nepogodna
okolnost je prisutnost tlaka samo u (6) te je neophodno povezati polje brzine i tlaka [3]. Druga
nepogodna okolnost je nelinearnost jednadţbe koja proizlazi iz konvektivnog člana te je iz tog
razloga nemoguće dobiti analitičko rješenje već se ono moţe izračunati samo iterativnim
numeričkim postupkom. Cilj numeričkih metoda je sustav parcijalnih jednadţbi „prevesti“ u
sustav algebarskih jednadţbi.
2.4 Rubni uvjeti
Kako bi sustav bio rješiv obavezno je uvoĎenje rubnih uvjeta koji se zadavaju na granici
domene. Razlikuju se dva glavna rubna uvjeta:
- Dirichletov rubni uvjet - propisuje vrijednost parcijalne diferencijalne jednadţbe na
granici domene,
- Neumannov rubni uvjet – propisuje vrijednost nultog gradijenta na granici domene, a u
slučaju generaliziranog Neumannovog uvjeta se propisuje proizvoljna vrijednost
gradijenta varijable u smjeru normale na površinu granice.
U računalnoj dinamici fluida pri optjecanju plovnog objekta granice domene tj. rubni uvjeti
najčešće su:
- simetralna ravnina - u slučaju simetrije plovnog objekta ili zadanog problema,
omogućava veliku uštedu u ukupnom trajanju proračuna,
- ulazna granica - Dirichletov uvjet – ulaz fluida tj. odreĎuje se brzina nastrujavanja
(Dirichlet) dok se za tlak koristi Neumannov uvjet,
- izlazna granica - Neumannov uvjet – izlaz fluida. Za brzinu se postavlja uvjet nultog
gradijenta (Neumann), a tlak se postavi kao nepromjenjiv,
- zid - nepropusna granica, u viskoznom strujanju fluid se „lijepi“ na stijenku te je brzina
uz zid jednaka brzini napredovanja zida.
Pojavljuje se još jedan specifičan rubni uvjet za plovne objekte, a to je rubni uvjet na slobodnoj
površini. Prema [2] slobodna površina je razdjelna površina dvaju fluida od kojih je jedan
izrazito manje gustoće i dinamičke viskoznosti od drugog (npr. zrak i voda).

5
2.5 „Volume of Fluid“ metoda
Najčešće korištena i najkonzervativnija metoda modeliranja slobodne površine je „Volume of
Fluid“ metoda. Navedena metoda uvodi novu jednadţbu indikatorske funkcije [4] u sustav
parcijalnih diferencijalnih jednadţbi. Indikatorska funkcija predstavlja skalarno polje koje ima
sljedeće vrijednosti:
( ) {
. ( 8 )
Moţe se definirati i na sljedeći način:
( )
. ( 9 )
Veličina V1 predstavlja volumen prvog fluida u ukupnom volumenu, a V ukupni volumen ćelije.
Vrijednost funkcije ovisi o poloţaju i vremenu, a njen ulaz u Navier – Stokesovu jednadţbu se
vrši na sljedeći:
, ( 10 )
. ( 11 )
Iz jednadţbe (8) je vidljivo da se radi o funkciji sa skokovitom promjenom koja nije derivabilna
u cijeloj domeni, a iz toga proizlazi da iz (10) i (11) gustoća i dinamička viskoznost prelaze u
funkcije koje nisu kontinuirane po cijeloj domeni. Kontinuiranost i derivabilnost funkcije , a
shodno tome i funkcija i , se dobija modifikacijom indikatorske funkcije u sljedeći oblik:
( ) {
. ( 12 )
U dvofaznom strujanju slobodnoj površini se moţe pristupiti na dva načina: Lagrangeovim
pristupom praćenja čestica koje polazi od jednadţbi gibanja ili Eulerovim pristupom koje polazi
od polja brzine. Prema [5] razmatra se Eulerov opis gibanja za „VOF“ metodu. Uvjet je da
materijalna derivacija slobodne površine bude jednaka nuli:

6
. ( 13 )
Mnoţenjem indikatorske funkcije s jednadţbom očuvanja mase (5) te zbrajanjem s (13) dobije
se:
. ( 14 )
Primjenom pravila za deriviranje umnoška dobije se transportna jednadţba indikatorske funkcije:
. ( 15 )
Indikatorska funkcija uvijek mora imati vrijednost izmeĎu 0 i 1 što je čini pogodnom samo za
diskretizaciju prvog reda (diskretizacije drugog reda točnosti su sklone oscilacijama). Kako bi
funkcija ostala ograničena i tanki sloj slobodne površine što manje debljine uvodi se dodatni
kompresijski član koji je opisan opširno u [6], a o njemu će biti više u poglavlju s numeričkim
metodama:
, ( 16 )
gdje je:
– odabrano polje brzine za kompresiju slobodne površine.
Kako bi u potpunosti opisala jednadţba indikatorske funkcije u slučaju zraka i vode potrebno je
uvesti dva nova uvjeta na slobodnoj površini ( [4], [7], [8] ) te modificirati Navier-Stokesove
jednadţbe.
2.5.1 Kinematički rubni uvjet
Kinematički rubni uvjet [8] kada nema prijenosa mase preko granične površine glasi:
, ( 17 )
gdje je:
vrijednost polja brzine beskonačno blizu slobodne površine sa strane gušćeg fluida,
vrijednost polja brzine beskonačno blizu slobodne površine sa strane fluida manje
gustoće.
Matematički zapis glasi:
, ( 18 )
, ( 19 )
gdje je:
slobodna površina izmeĎu dva fluida (1 i 2) .

7
2.5.2 Dinamički rubni uvjet
Dinamički rubni uvjet [8] proizlazi iz ravnoteţe tangencijalnih naprezanja tj. odnosa izmeĎu
normalnih derivacija tangencijalnog polja brzine sa jedne i druge strane slobodne površine [9]:
, ( 20 )
gdje je:
efektivna dinamička viskoznost fluida 1 ili 2 (Ns/m2),
(efektivna dinamička viskoznost je zbroj molekularne i turublentne viskoznosti),
jedinični vektor normale okomit na površinu ,
tangencijalne komponente polja brzine (m/s),
operator površinskog gradijenta. Matematički zapis: ,
(jednak je običnom gradijentu bez vektora u smjeru normale na površinu [10]),
normalna komponenta brzine (m/s),
koeficijent površinske napetosti (N/m).
Površinska napetost se očituje kao sila koja je tangencijalna na površinu koja dijeli dva fluida,
meĎutim ako je sila zakrivljena ona sadrţi i normalnu komponentu (Slika 1.).
Slika 1. Naprezanja uslijed sile površinske napetosti [3]
Koeficijent površinske napetosti se definira kao rad koji je potreban da se napravi jedinična
slobodna površina [3]. Posljedica površinske napetosti je skok tlaka koji se opisuje Young-
Laplace jednadţbom:
) = , ( 21 )

8
gdje je:
razlika tlaka ili Laplace-ov tlak (Pa),
glavni radijusi zakrivljenosti (m),
srednja zakrivljenost (m-1
).
Konačno, u općem zapisu skok tlaka za slobodnu površinu glasi:
, ( 22 )
gdje je:
srednja zakrivljenost, ako se poznaje normala jediničnog vektora.
Prvi član s desne strane označava skok tlaka zbog površinske napetosti, a drugi član skok tlaka
zbog viskoznih naprezanja preko slobodne površine.
Primjena na hidrodinamiku plovnih objekata:
Tangencijalni rubni uvjet nije od velike vaţnosti za hidrodinamiku plovnih objekata [8] te se
uzima njegova pojednostavljena forma gdje se pretpostavlja kontinuiranost efektivne dinamičke
viskoznosti preko slobodne površine tj. pretpostavlja se da funkcija nema skok na slobodnoj
površini koristeći indikatorsku funkciju. Izraz (11) podijeljen s gustoćom glasi:
. ( 23 )
Ako se uzme da je koeficijent površinske napetosti konstantan, a gradijent tangencijalne brzine
kontinuiran preko slobodne površine te se pretpostavi (23), tada iz jednadţbe (17) proizlazi da je
gradijent polja brzine kontinuiran preko slobodne površine.
Normalni rubni uvjet je izveden iz razlike tlakova na slobodnoj površini. Uzimajući u obzir
pretpostavke za tangencijalni rubni uvjet jednadţba (22) prelazi u, [8]:
, ( 24 )
gdje je:
ukupni tlak, + i – ovisi s koje strane slobodne površine se nalazi.
Ako se tlak rastavi na statički i dinamički, slijedi:
. ( 25 )
9
Za dinamički tlak vrijedi:
, ( 26 )
gdje je:
dinamički tlak (Pa),
gravitacijsko ubrzanje (m/s2),
vektor poloţaja (m).
Jednadţba (25) kaţe da je skok dinamičkog tlaka proporcionalan skoku gustoće. Ovom
jednadţbom je u obzir uzet skok gustoće na slobodnoj površini koji ima najveći učinak pri
modeliranju slobodne površine. Ova metoda se naziva „Ghost Fluid Method“-GFM i u
kombinaciji s VOF-metodom stvara vrlo tanki sloj slobodne površine od standardne VOF
metode te prema rješava problem nefizikalnih akceleracija fluida manje gustoće uz slobodnu
površinu pri linearnoj interpolaciji gustoće i dinamičkog tlaka u području slobodne površine,
opširno o navedenom u [8].
Konačni izgled jednadţbe količine gibanja je sljedeći:
, ( 27 )
gdje gustoća poprima vrijednost ovisno u kojoj se fazi nalazi (zrak ili voda). U području
slobodne površine jednadţba treba zadovoljiti još navedeni uvjet (26). Ako se isti pristup skoka
funkcije kao u (17), (23) i (24) primjeni na (27) tada će nestacionarni i konvektivni član isčeznuti
(pretpostavljeno kontinuirano polje brzine (17)), difuzni član zbog (23) takoĎer je jednak nuli, te
se dobiva novi uvjet koji treba zadovoljiti za područje slobodne površine:
(
)
(
)
. ( 28 )
Jednadţba zakona očuvanja mase ima isti izgled kao (5), a uz uvjet (17) je valjana za cijelu
domenu. Zaključno, korištene jednadţbe matematičkog modela koje će se diskretizirati u
sljedećem poglavlju su redom:
- jednadţba očuvanja mase (5), uz uvjet (17),
- jednadţba količine gibanja (27), uz uvjete (23), (26), (28) koje treba prikladno modelirati,
- transportna jednadţba indikatorske funkcije (16).
10
2.5 Turbulentno strujanje
Većina strujanja u inţenjerskoj praksi je turbulentna, a pojavljuje se pri visokim Reynoldsovim
brojevima. Reynoldsov broj definiran je sljedećom formulom:
. ( 29 )
gdje je:
u brzina fluida (m/s),
karakteristična duljina (m).
Definitivno najbolji primjer turbulencije je izdizanje dima iz cigarete na kojem se moţe
promatrati prijelaz iz laminarnog u tranzijentno te na kraju u turbulentno strujanje zbog
povećanja karakteristične duljine fluida (u ovom slučaju visine protezanja dima) što ima za
posljedicu povećanje Reynoldsovog broja. Vaţno je naglasiti da je kritična vrijednost
Reynoldsovog broja različita za različita strujanja. Tako naprimjer za strujanje oko cilindra
prijelazno razdoblje pojavljuje se već pri Reynoldsovim vrijednostima od oko 100, dok je za
strujanje u cijevima isti reţim strujanja postignut tek za Re=2300.
Prema [2], [3], [7] turbulenciju karakterizira:
- nestacionarnost, kaotičnost – česte fluktuacije brzine unutar fluida, koje mogu izgledati u
potpunosti nasumične,
- vrtloţnost – stvaranje vrtloga čestica različitih intenziteta,
- difuznost – miješanje slojeva fluida različite brzine, brţe čestice „uskaču“ meĎu sporije i
povećavaju im količinu energije i obratno,
- disipacija energije – zbog prethodno navedenog procesa difuzije dolazi do smanjenja
ukupne kinetičke energije, a izgubljena energija je nepovratno pretvorena u unutarnju
energiju fluida.
Iako je turbulencija u potpunosti opisana Navier-Stokesovim jednadţbama njeno direktno
rješavanje numeričkim metodama zahtjevalo bi vrlo male vremenske korake i veliku finoću
mreţe, zbog čega bi numeričke simulacije bile preskupe i vremenski bi trajale predugo. U
inţenjerskoj struci najčešće je od interesa sila ili opterećenje u nekom odreĎenom području te se
iz tog razloga turbulenciju odgovarajuće modelira. U principu modeliranje turbulencije štedi
11
vrijeme numeričkih simulacija i time čini cijeli proces isplativim i prihvatljivim. Svi modeli
turbulencije temelje se na osrednjavanju profila brzine ignorirajući njegovu pulsaciju i
aproksimiranju srednje vrijednosti, a nazivaju se Reynoldsove osrednjene Navier-Stokesove
jednadţbe (engl. „Reynolds Averaged Navier Stokes“), skraćeno RANS.
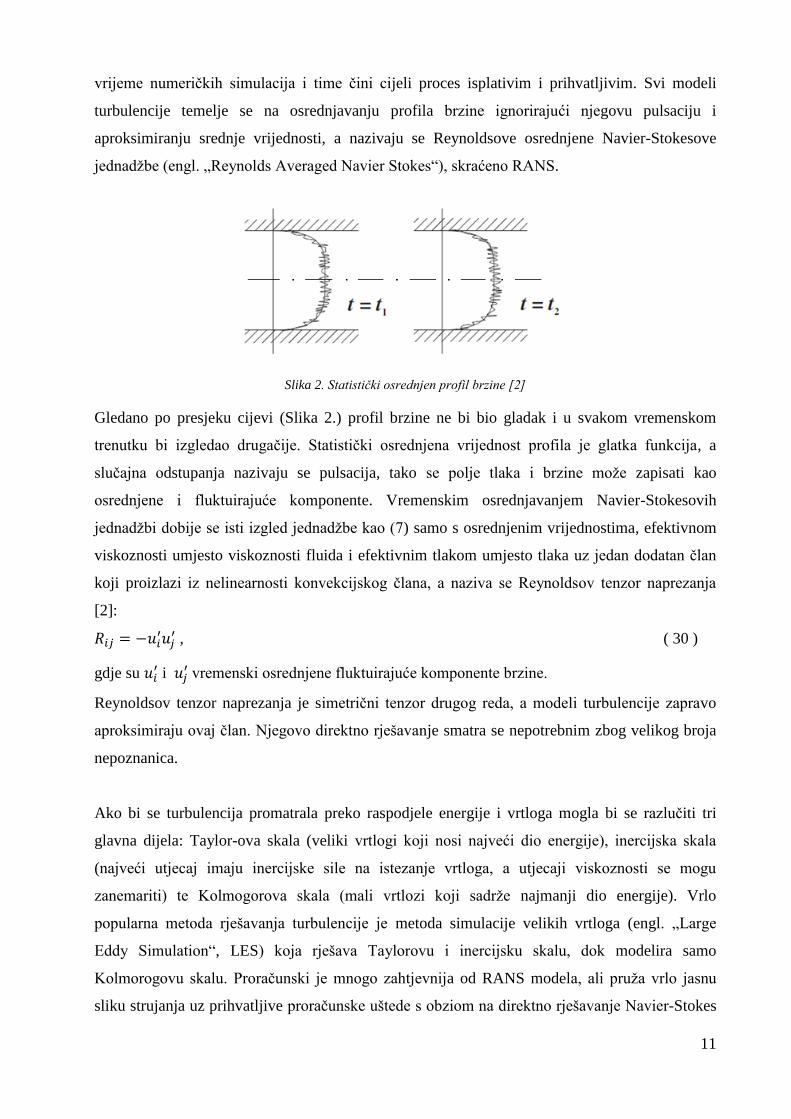
Slika 2. Statistički osrednjen profil brzine [2]
Gledano po presjeku cijevi (Slika 2.) profil brzine ne bi bio gladak i u svakom vremenskom
trenutku bi izgledao drugačije. Statistički osrednjena vrijednost profila je glatka funkcija, a
slučajna odstupanja nazivaju se pulsacija, tako se polje tlaka i brzine moţe zapisati kao
osrednjene i fluktuirajuće komponente. Vremenskim osrednjavanjem Navier-Stokesovih
jednadţbi dobije se isti izgled jednadţbe kao (7) samo s osrednjenim vrijednostima, efektivnom
viskoznosti umjesto viskoznosti fluida i efektivnim tlakom umjesto tlaka uz jedan dodatan član
koji proizlazi iz nelinearnosti konvekcijskog člana, a naziva se Reynoldsov tenzor naprezanja
[2]:
, ( 30 )
gdje su i
vremenski osrednjene fluktuirajuće komponente brzine.
Reynoldsov tenzor naprezanja je simetrični tenzor drugog reda, a modeli turbulencije zapravo
aproksimiraju ovaj član. Njegovo direktno rješavanje smatra se nepotrebnim zbog velikog broja
nepoznanica.
Ako bi se turbulencija promatrala preko raspodjele energije i vrtloga mogla bi se razlučiti tri
glavna dijela: Taylor-ova skala (veliki vrtlogi koji nosi najveći dio energije), inercijska skala
(najveći utjecaj imaju inercijske sile na istezanje vrtloga, a utjecaji viskoznosti se mogu
zanemariti) te Kolmogorova skala (mali vrtlozi koji sadrţe najmanji dio energije). Vrlo
popularna metoda rješavanja turbulencije je metoda simulacije velikih vrtloga (engl. „Large
Eddy Simulation“, LES) koja rješava Taylorovu i inercijsku skalu, dok modelira samo
Kolmorogovu skalu. Proračunski je mnogo zahtjevnija od RANS modela, ali pruţa vrlo jasnu
sliku strujanja uz prihvatljive proračunske uštede s obziom na direktno rješavanje Navier-Stokes
12
jednadţbi. Najraspostranjeniji RANS modeli su oni s dvije dodatne jednadţbe, a u ovom radu
koristit će se (eng. „Shear Stress Transport“) model gdje označava turbulentnu
kinetičku energiju, a specifičnu disipaciju energije (turbulentnu frekvenciju) [11].
2.5.1 model turbulencije
Općeniti model ima veliku osjetljivost o rubnim uvjetima daleko od stijenke, ali se puno
bolje ponašaju prilikom suprotnih gradijenata tlaka za razliku od koji u tim situacijama
često precijene intenzitet smičnog naprezanja. Model je odabran za rad iz razloga što
uzima u obzir prijenos turbulentnih smičnih naprezanja u graničnim slojevima sa suprotnim
gradijentima tlaka i prilikom pojave odvajanja strujanja, a pribliţavanjem zidu se prebacuje na
model čime se rješava najveći problem ove familije modela turbulencije, [11]. S obzirom
da je zadatak rada procjena značajki polja strujanja na krmi broda gdje se pojavljuje jaki suprotni
gradijent tlaka ovaj model je procijenjen kao najpovoljniji izbor.
Model se temelji na pretpostavci da je smično naprezanje u graničnom sloju proporcionalno
kinetičkoj energiji, [11]:
, ( 31 )
gdje je:
konstanta.
Uobičajeno je da se za modele s dvije jednadţbe smično naprezanje izračuna iz relacije, [11]:
, ( 32 )
gdje je:
derivacija brzine s obzirom na okomitu os (s
-1),
turbulentna viskoznost (N/m2),
Moţe se reći da je za turbulentnu difuziju odgovorna turbulentna viskoznost koja uzrokuje
turbulentna naprezanja. Turbulentna viskoznost nije svojstvo fluida kao molekularna viskoznost
već je posljedica reţima strujanja, a u laminarnom strujanju je jednaka nuli, [2].
Za konvencionalne modele s dvije jednadţbe (31) se moţe zapisati, [11]:
√
. ( 33 )

13
Za slučajeve suprotnog gradijenta tlaka eksperimentima je dokazano da omjer proizvodnje i
disipacije kinetičke energije moţe biti mnogo veći od jedan čime dolazi do precjenjivanja
smičnog naprezanja. Kako bi se zadovoljilo (31) potrebno je redefinirati turbulentnu viskoznost,
[11]:
, ( 34 )
gdje je:
dinamička turbulentna viskoznost podijeljena s gustoćom (m2/s).
Ukratko, u konvencionalnim modelima prema (32) se smično naprezanje trenutno mijenja s
promjenom brzine deformacije
, a jednadţba (34) omogućava da se smično naprezanje ne
mjenja brţe od promjene . Očito je da jednadţba (34) stvara neizmjerno veliku viskoznost
kada brzina deformacije ide u nulu te je potrebna dodatna jednadţba, [11]:
. ( 35 )
Nejednakost
> vrijedi kada je proizvodnja
kintetičke energije veća od disipacije, tj. za slučaj suprotnog gradijenta tlaka će jednaţba
poprimiti oblik (34), a u suprotnom standardni oblik modela:
. ( 36 )
Kao što je ranije naglašeno, ovaj model koristi se u otprilike 50% graničnog sloja, a izvan tog
dijela prelazi u model. Problem prijelaza s na model rješava se prijelaznom
funkcijom . Slijede konačne jednadţbe SST modela, [11]:
[
] , ( 37 )
[
]
. ( 38 )
Ako se bilo koja konstanta u konvencionalnom modelu nazove , a u modelu
tada za svaku konstantu modificiranog SST modela vrijedi:
. ( 39 )
14
Za prvi set konstanti za unutrašnjost graničnog sloja SST dobiva se:
, , , ,
, , ⁄ √ ⁄ .
Za drugi set konstanti za standardni na model dobiva se:
, , , ,
, ⁄ √ ⁄ .
Potrebno je još napraviti prijelaz za dinamičku viskoznost takoĎer funkcijom prijelaza :
. ( 40 )
Prijelazna funkcija je jednaka jedinici u gotovo 50% graničnog sloja, a onda postepeno ide u
nulu, a ima vrijednost jedan u gotovo cijelom području graničnog sloja gdje pri samom kraju
sloja postepeno ide u nulu, [11].
Uz jednadţbe (37), (38), (39) i (40) i prijelaznim funkcijama potrebno je još definirati rubne
uvjete kinetičke energije i specifične disipacije. U simulaciji je korišten intenzitet turbulencije od
3% uz omjer turbulentne i dinamičke viskoznosti od 10.
2.5.2 Zidne funkcije (engl.„wall functions“)
U neposrednoj blizini stijenke, turbulentne pulsacije su onemogućene samom stijenkom, a
poznato je da su pulsacije brzine na samoj stijenci jednake nuli. Kada nema turbulentnih
puslacija nema ni turbulentne viskoznosti te se ona moţe zanemariti za područje uz stijenku.
Udaljavanjem od stijenke pulsacije se povećavaju, pa prema tome i turbulentna viskoznost.
Vaţno je napomenuti da se navedene vrijednosti razlikuju ovisno o tipu strujanja i literaturi.
Vrijedi, [2]:
, ( 41 )
gdje je:
- bezdimenzijska udaljenost od stijenke,
– brzina trenja na stijenci (m/s),
y – geometrijska udaljenost od stijenke (m),
– kinematska viskoznost fluida uz stijenku (m2/s).
Dovoljno daleko od stijenke strujanje postaje toliko razvijeno te se molekularna viskoznost moţe
zanemariti, a u tom području se moţe pretpostaviti da se put miješanja povećava razmjerno s
15
udaljenošću od stijenke, [2]. Stoga se područje graničnog sloja moţe podijeliti na tri različita
područja:
1) Linearni podsloj: ,
2) Prijelazni sloj: ,
3) Inercijalni podsloj: .
Definira se i bezdimenzijska brzina koja je jednaka:
, ( 42 )
gdje je:
– srednja brzina fluida u promatranoj točki (m/s).
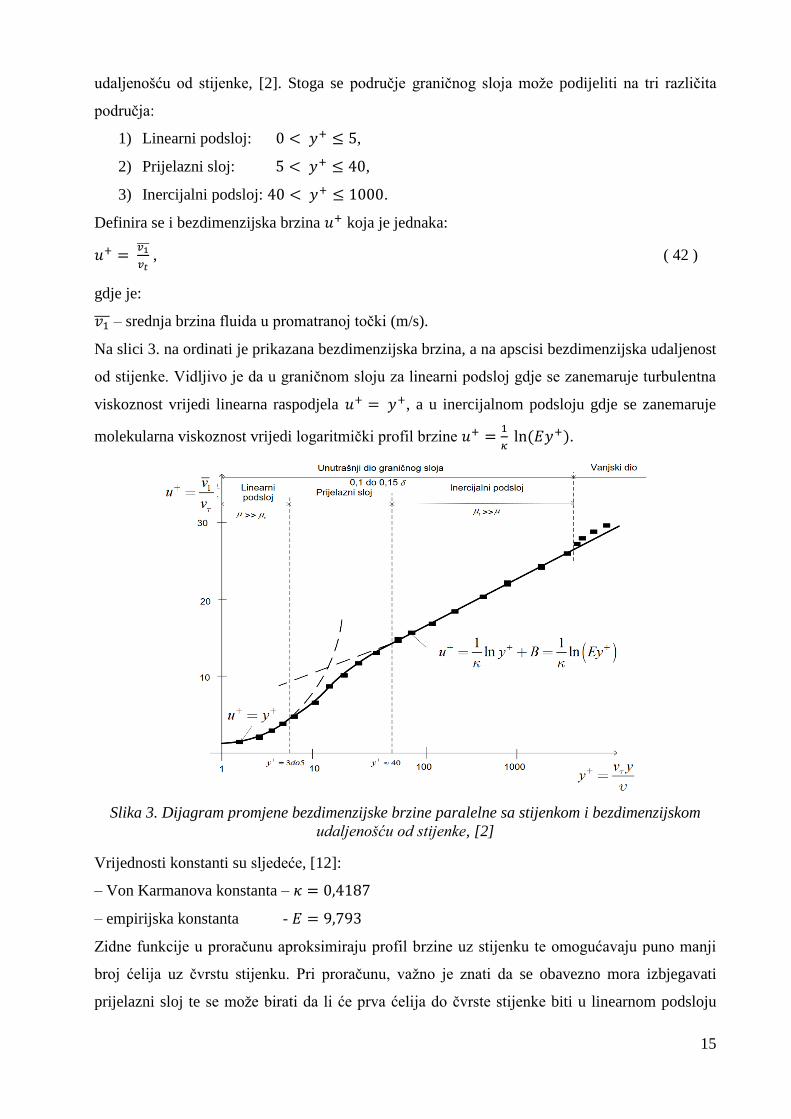
Na slici 3. na ordinati je prikazana bezdimenzijska brzina, a na apscisi bezdimenzijska udaljenost
od stijenke. Vidljivo je da u graničnom sloju za linearni podsloj gdje se zanemaruje turbulentna
viskoznost vrijedi linearna raspodjela , a u inercijalnom podsloju gdje se zanemaruje
molekularna viskoznost vrijedi logaritmički profil brzine
.
Slika 3. Dijagram promjene bezdimenzijske brzine paralelne sa stijenkom i bezdimenzijskom
udaljenošću od stijenke, [2]
Vrijednosti konstanti su sljedeće, [12]:
– Von Karmanova konstanta –
– empirijska konstanta -
Zidne funkcije u proračunu aproksimiraju profil brzine uz stijenku te omogućavaju puno manji
broj ćelija uz čvrstu stijenku. Pri proračunu, vaţno je znati da se obavezno mora izbjegavati
prijelazni sloj te se moţe birati da li će prva ćelija do čvrste stijenke biti u linearnom podsloju

16
gdje nije potrebna upotreba zidnih funkcija ili u inercijalnom podsloju gdje će se koristiti. U
ovom radu koristiti će se zidne funkcije u svrhu smanjenja broja ćelija te je cilj da se prva ćelija
do čvrste stijenke nalazi u inercijalnom podsloju.
2.6 Relaksacijske zone
Pri optjecanju broda na slobodnoj površini dolazi do pojave valova tj. do deformacije slobodne
površine. U domeni simulacije potrebno je spriječiti moguću refleksiju valova od granica
domene kako bi se onemogućio njihov utjecaj na konačni rezultat. Val se postepeno prigušuje
koristeći funkciju (slika 4.) koja glasi, [13]:
, ( 43 )
gdje je:
– duţina relaksacijske zone (m),
d – najkraća udaljenost od granice (m),
p – numerički parametar.
Slika 4. Funkcija prigušivanja valova w [13]
Ako se pretpostavi neko skalarno polje ϕ, a τ(ϕ) kao operator transporta skalarnog polja tada u
slučaju da se zna slijedi vrijednost na granicama, [13]:
, ( 44 )
gdje je:
– operator relaksacijske zone.
Konačno koristeći funkciju prigušivanja w slijedi, [13]:
= 0 ( 45 )
Logično, kada je w=1 na granicama slijedi prigušeno rješenje tj. gubi se mogućnost refleksije
valova, a kada je w=0 nema nikakvog utjecaja relaksacijske zone na rješenje.
17
3. DISKRETIZACIJA MATEMATIČKOG MODELA
Matematički model naveden u poglavlju 2. je analitički neriješiv te je svrha diskretizacije
prevesti parcijalne diferencijalne jednadţbe matematičkog modela u sustav algebarskih
jednadţbi. Numeričko rješavanje sastoji se iz tri koraka [14]:
1) Diskretizacija prostora - geometrijska mreţa,
2) Diskretizacija jednadţbi - numeričke sheme,
3) Rješavanje sustava diskretiziranih jednadţbi.
3.1 Diskretizacija prostora
Diskretizacija prostora u ovom radu napravljena je metodom konačnih volumena. Kontrolni
volumeni moraju zadovoljiti dva uvjeta, [15]:
- ne smiju se meĎusobno preklapati,
- moraju popunjavati cijelu domenu.
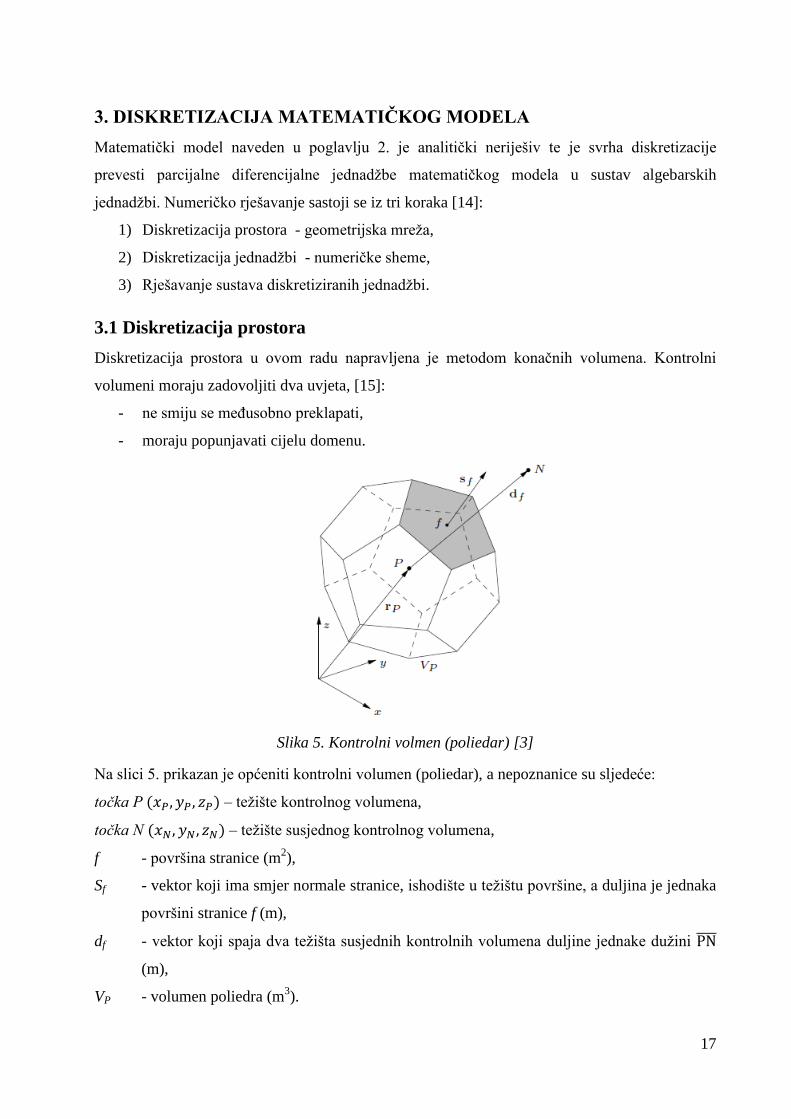
Slika 5. Kontrolni volmen (poliedar) [3]
Na slici 5. prikazan je općeniti kontrolni volumen (poliedar), a nepoznanice su sljedeće:
točka P – teţište kontrolnog volumena,
točka N – teţište susjednog kontrolnog volumena,
f - površina stranice (m2),
Sf - vektor koji ima smjer normale stranice, ishodište u teţištu površine, a duljina je jednaka
površini stranice f (m),
df - vektor koji spaja dva teţišta susjednih kontrolnih volumena duljine jednake duţini
(m),
VP - volumen poliedra (m3).
18
Teţište kontrolnog volumena definirano je formulom[15]:
∫
. ( 46 )
Sve stranice podijeljene su u dvije grupe [15]:
- unutrašnje stranice – ona koja se nalazi izmeĎu dva kontrolna volumena
- granične stranice – ona koja se nalaze na granici domene
Orijentacija površinskog vektora Sf odreĎena je s obzirom da li je kontrolni volumen spremljen
kao „vlasnik“ ili „susjed“. Kod „vlasnika“ površinski vektor gleda izvan poliedra, a kod
„susjeda“ unutar poliedra. U graničnoj stranici površinski vektor uvijek gleda prema van.
Teţište lica definirano je formulom, [3]:
∫ ( )
. ( 47 )
Površinski vektor odreĎen je na sljedeći način, [3]:
∫
, ( 48 )
gdje je:
– jedinični vektor normale na površinu.
Moguće je da teţište površine ne leţi na samoj površini (zakrivljena površina) stranice, ali teţište
kontrolnog volumena mora leţati u samom poliedru. U praksi se površine i volumeni ćelija
računaju razlaganjem ćelije na trokute i piramide, [3].
3.2 Diskretizacija standardne transportne jednadžbe
U ovom poglavlju biti će prikazan način diskretizacije pojedinih članova u standardnoj
transportnoj jednadţbi sklarnog polja. Radi se o parcijalnoj diferencijalnoj jednadţbi drugog
reda. Diferencijalne jednadţbe višeg reda svode se na sustav linearnih jednadţbi prvog reda
uvoĎenjem odgovarajućih početnih uvjeta te se rješavaju odgovarajućom metodom, [14].
Parcijalne diferencijalne jednadţbe dijele se na: hiperboličke, eliptične i paraboličke. U ovom
slučaju (nestlačvo strujanje) radi se o paraboličko-eliptičnoj jednadţbi iz razloga što informacija
putuje u svim smjerovima u prostoru, ali u samo jednom smjeru u vremenu [7]. U prijevodu, za
svaki vremenski korak rješava se eliptična jednadţba u kojoj, uz pretpostavljenu nestlačivost
fluida, informacija putuje beskonačno brzo meĎu svim ćelijama te promjena u jednoj ćeliji ima
utjecaja na sve ćelije.
Pri numeričkom rješavanju jednadţba se podijeli na konačan broj diskretnih intervala koji
mora biti dovoljno malen kako bi se osigurala dijagonalno dominantna matrica. U eksplicitnoj

19
metodi su sve vrijednosti osim traţene ćelije izraţene preko prošlog vremenskog koraka dok su u
implicitnoj metodi pokušava što više varijabli izraziti preko novog vremenskog kraka. S obzirom
da je u ovom radu korištena implicitna metoda, stabilnost simulacije nije ograničena malim
vremenskim korakom zbog Courantovog broja kao kod eksplicitnih metoda što je izrazito
povoljno u simulaciji optjecanja plovnog objekta. Courantov broj definiran je sljedećom
formulom:
, ( 49 )
gdje je:
– vremenski korak (s),
– duljina ćelije u smjeru vektora brzine (m).
Transportna jednadţba za neko polje ϕ glasi:
( ) , ( 50 )
gdje je:
– koeficijent difuzije
– polje brzine (m/s)
Jedina nepoznanica u jednadţbi je skalarno polje .
Imena članova u (47) su redom s lijeva na desno: nestacionarni, konvekcijski, difuzijski i izvorni
član. Integracijom jednadţbe (47) po promatranom kontrolnom volumenu slijedi:
∫
∫
∫ ( )
∫
. ( 51 )
3.2.1 Diskretizacija nestacionarnog člana
Diskretizacija nestacionarnog člana provedena je Euler-ovom implicitnom metodom koja je
prvog reda točnosti:
∫
. ( 52 )
Notacija „n“ i „o“ predstavlja vrijednost u teţištu P za vremenski korak n – novi (engl. „new“) i
o – stari (engl. „old“).

20
3.2.2 Diskretizacija gradijenta metodom najmanjih kvadrata
Najčešća numerička shema diskretizacije gradijenta je Gaussov teorem. MeĎutim, diskretizacija
gradijenta Gaussovim teoremom, iako je formalno drugog reda točnosti, na iskrivljenim
mreţama (posebno tetraedrima), gubi svoju točnost te je u ovom radu korištena metoda
najmanjih kvadrata diskretizacije gradijenta koja neovisno o zakrivljenju mreţe zadrţava drugi
red točnosti:
, ( 53 )
gdje je:
| | - teţinski koeficijent metode (m
-1),
= – simetrična 3x3 matrica.
3.2.3 Diskretizacija konvekcijskog člana
Za diskretizaciju konvekcijskog člana koristi se Gaussov teorem, [15]:
∫
∮
, ( 54 )
gdje je:
F – maseni protok kroz stranice volumena (kg/s)
Indeksni zapis f podrazumijeva vrijednost varijable u teţištu stranice poliedra, takoĎer vaţno je
napomenuti da podrazumijeva razliku protoka na stranicama izmeĎu „vlasnika“ i
„susjeda“, bolje rečeno:
. ( 55 )
Jednadţba (54) kaţe da je promjena unutar volumena jednaka sumi promjene protoka na svim
stranicama kontrolnog volumena. Potrebno je još interpolirati s teţišta kontrolnog volumena na
stranice, ali uz uvjet očuvanja ograničenosti varijable.
Interpolacijske sheme najčešće korištene za konvekciju su: uzvodna i linearno uzvodna shema.
Još će biti i navedena shema centralnih razlika koja se često koristi u proračunima.
21
Uzvodna shema
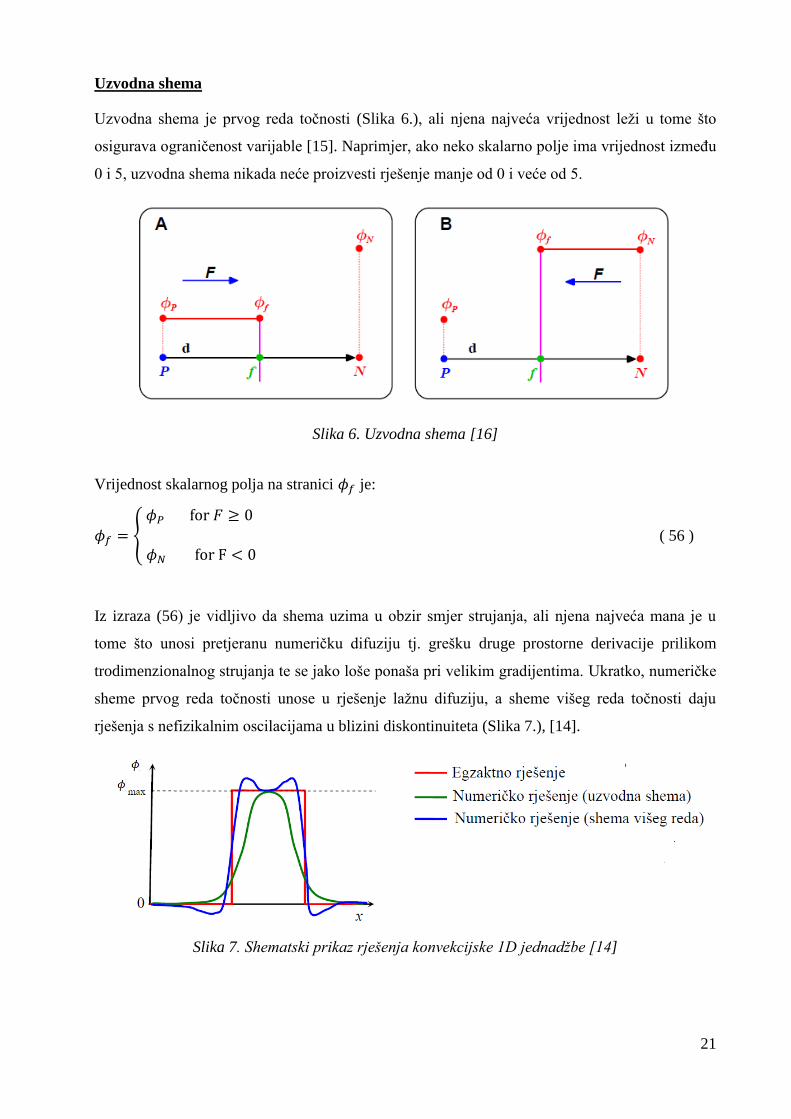
Uzvodna shema je prvog reda točnosti (Slika 6.), ali njena najveća vrijednost leţi u tome što
osigurava ograničenost varijable [15]. Naprimjer, ako neko skalarno polje ima vrijednost izmeĎu
0 i 5, uzvodna shema nikada neće proizvesti rješenje manje od 0 i veće od 5.
Slika 6. Uzvodna shema [16]
Vrijednost skalarnog polja na stranici je:
{
( 56 )
Iz izraza (56) je vidljivo da shema uzima u obzir smjer strujanja, ali njena najveća mana je u
tome što unosi pretjeranu numeričku difuziju tj. grešku druge prostorne derivacije prilikom
trodimenzionalnog strujanja te se jako loše ponaša pri velikim gradijentima. Ukratko, numeričke
sheme prvog reda točnosti unose u rješenje laţnu difuziju, a sheme višeg reda točnosti daju
rješenja s nefizikalnim oscilacijama u blizini diskontinuiteta (Slika 7.), [14].
Slika 7. Shematski prikaz rješenja konvekcijske 1D jednadžbe [14]
22
Linearno uzvodna shema
Ova shema kao i uzvodna shema uzima u obzir smjer strujanja, ali i vrijednost gradijenta izmeĎu
susjednih volumena. Dolazi do prvog reda točnosti implicitno (standardna uzvodna shema) te
vrši eksplicitnu korekciju ekstrapolacijom gradijenta iz jednog teţišta volumena u susjedni
ovisno o smjeru strujanja. Matematički rečeno:
{
, ( 57 )
gdje je:
- vektor udaljenosti od teţišta lica do teţišta susjednog uzvodnog volumena
Gradijent računa se metodom najmanjih kvadrata ili Gaussovim integralom.
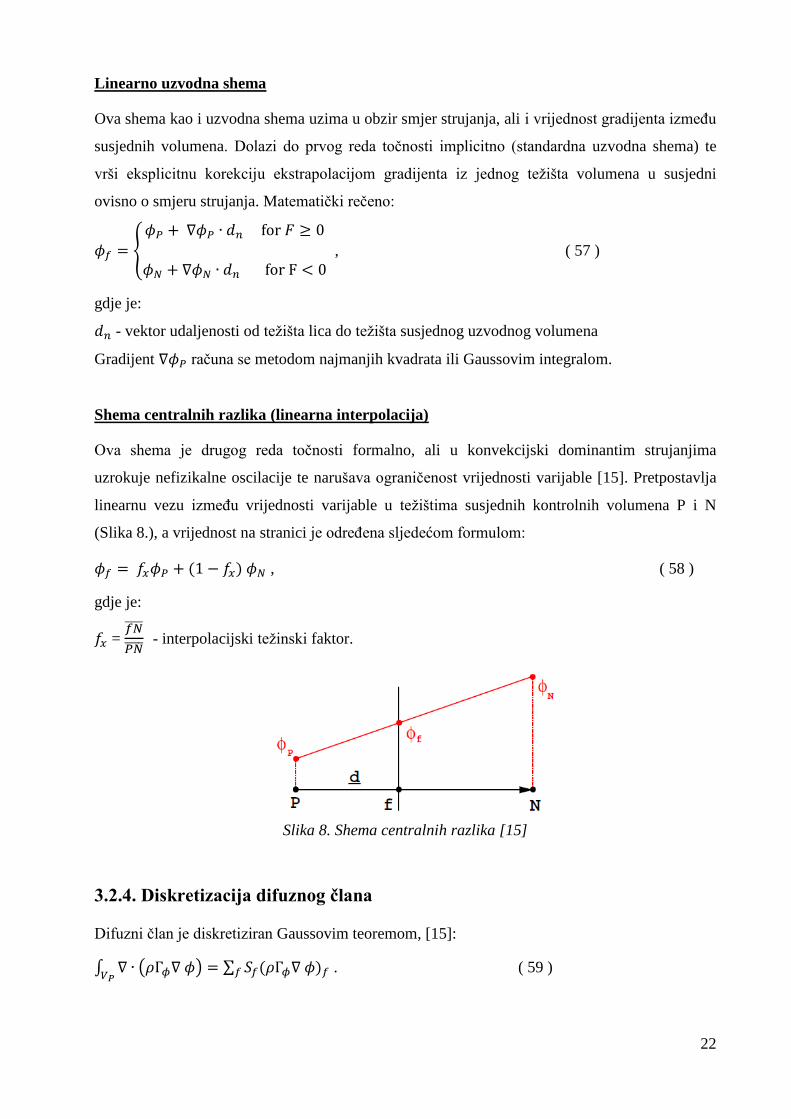
Shema centralnih razlika (linearna interpolacija)
Ova shema je drugog reda točnosti formalno, ali u konvekcijski dominantim strujanjima
uzrokuje nefizikalne oscilacije te narušava ograničenost vrijednosti varijable [15]. Pretpostavlja
linearnu vezu izmeĎu vrijednosti varijable u teţištima susjednih kontrolnih volumena P i N
(Slika 8.), a vrijednost na stranici je odreĎena sljedećom formulom:
, ( 58 )
gdje je:
=
- interpolacijski teţinski faktor.
Slika 8. Shema centralnih razlika [15]
3.2.4. Diskretizacija difuznog člana
Difuzni član je diskretiziran Gaussovim teoremom, [15]:
∫ ( )
. ( 59 )

23
U slučaju da je mreţa ortogonalna tj. u slučaju da su vektori i paralelni konačna
diskretizacija glasi:
| |
| | . ( 60 )
S obzirom da je to vrlo rijedak slučaj u praksi, potrebno je uvesti neortogonalnu korekciju
pomoću vektora i kao što je vidljivo na slici 9.
Slika 9. Neortogonalna korekcija [16]
Tada je:
, ( 61 )
gdje je prvi član s desne strane ortogonalan doprinos koji se rješava implicitno, a drugi član s
desne strane predstavlja eksplicitnu korekciju zbog neortogonalnosti mreţe. Slijedi izmjenjena
diskretizacija difuznog člana koja glasi:
| |
| | , ( 62 )
gdje se vektor odreĎuje na sljedeći način:
| | | | . ( 63 )
Korekcija zbog neortogonalnosti računa se metodom najmanjih kvadrata ili Gaussovim
teoremom te interpolacijom na stranicu.
3.2.5 Diskretizacija izvorskog člana
Svi članovi u jednadţbi koji nisu konvekcijski, difuzijski ili vremenski se tretiraju kao izvorski
članovi. Prvi korak je linearizacija izvorskog člana, [15]:
. ( 64 )
Zatim slijedi izračunavanje volumnog integrala:
∫
. ( 65 )
24
3.2.6 Diskretizirana standardna transportna jednadžba
Konačni oblik diskretizirane jednadţbe glasi, [15]:
( )
( 66 )
Ovako dobivena jednadţba rješava se iterativnim metodama. Iterativne metode započinju
rješavanje sustava jednadţbi s početnim rješenjem koje sustavno „popravljaju“ dok se ne dobije
dovoljna točnost rješenja.
3.2.7 Numerički rubni uvjeti
Za rješavanje jednadţbe (66) potrebni su početni uvjeti kako bi sustav bio rješiv. Implementacija
rubnih uvjeta vrši se na sljedeći način, [15]:
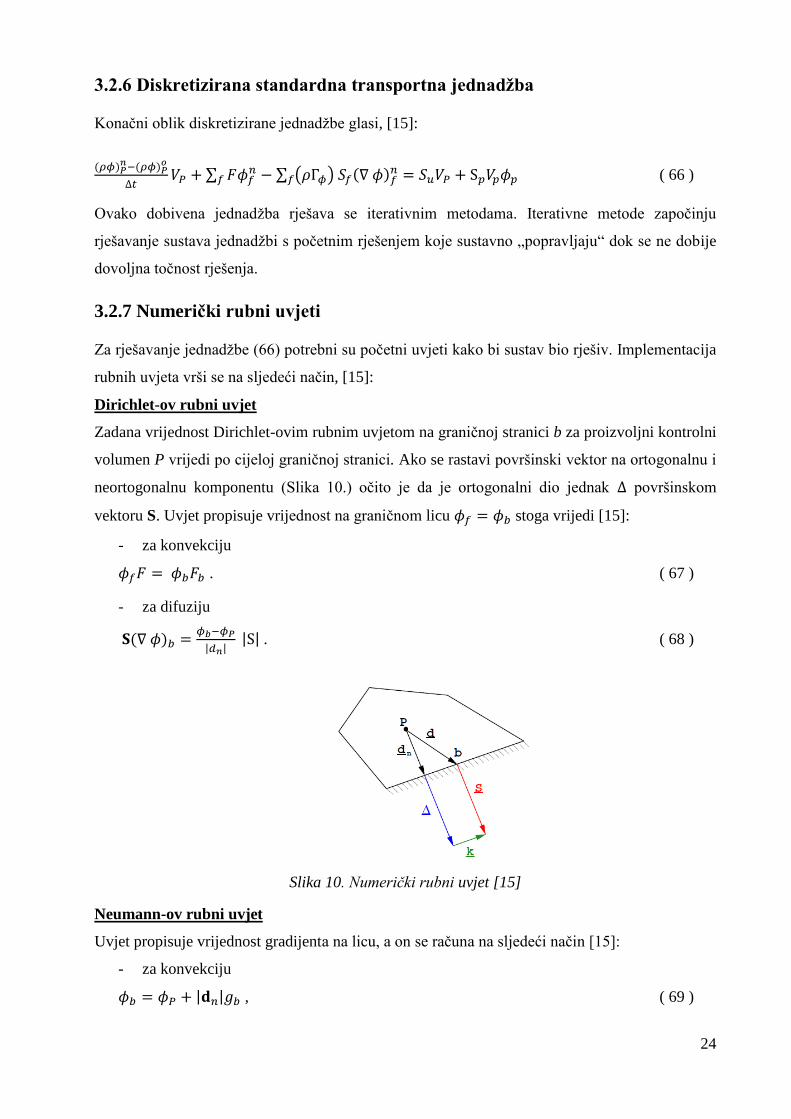
Dirichlet-ov rubni uvjet
Zadana vrijednost Dirichlet-ovim rubnim uvjetom na graničnoj stranici b za proizvoljni kontrolni
volumen P vrijedi po cijeloj graničnoj stranici. Ako se rastavi površinski vektor na ortogonalnu i
neortogonalnu komponentu (Slika 10.) očito je da je ortogonalni dio jednak površinskom
vektoru S. Uvjet propisuje vrijednost na graničnom licu stoga vrijedi [15]:
- za konvekciju
. ( 67 )
- za difuziju
| | | | . ( 68 )
Slika 10. Numerički rubni uvjet [15]
Neumann-ov rubni uvjet
Uvjet propisuje vrijednost gradijenta na licu, a on se računa na sljedeći način [15]:
- za konvekciju
| | , ( 69 )

25
gdje je:
=
| | - vrijednost gradijenta na granici,
- za difuziju
( ) | | .
Navedena diskretizacija vrijedi u slučaju ako je rubni uvjet konstantan preko cijele stranice
kontrolnog volumena. TakoĎer, u svrhu povećavanja reda točnosti moguće je uzeti u obzir i
neortogonalnu korekciju kao što je ranije prikazano.
3.3 Diskretizacija matematičkog modela optjecanja plovnog objekta
Nakon što je objašnjena diskretizacija standardne transportne jednadţbe vrijeme je za
diskretizaciju sustava jednadţbi matematičkog modela za optjecanje plovnog objekta.
Diskretizacija ima jednaki princip kao u prošlom poglavlju uz odreĎene razlike s obzirom na
GFM te problem slobodne površine.
3.3.1 Navier – Stokes jednadžbe
U slučaju optjecanja plovnog objekta nepoznanica u jednadţbi količine gibanja je vektorsko
polje umjesto skalarnog polja zbog čega se javlja nelinearnost u konvekcijskom članu.
, ( 70 )
gdje je:
- notacija preuzeta iz, [8].
Kako bi se rješio problem njegove nelinearnosti jednostavno se preuzme jedna brzina iz prošlog
vremenskog koraka, a drugu se rješava iterativno. Jedina razlika diskretizacije (70) usporedbi sa
standardnom transportnom jednadţbom je u konvekcijskom članu.
U polu-diskretiziranom obliku jednadţba (70) glasi:
[| |
| |
] , ( 71 )
gdje je:
– volumni protok kroz stranice kontrolnog volumena (m
3/s).
Gradijent tlaka je u ovoj fazi ostavljen nediskretiziran zbog lakšeg manipuliranja varijablama pri
izmjeni formulacije jednadţbe kontinuiteta o čemu će biti riječi u sljedećem poglavlju. Iz
jednadţbe (71) je očito da se ponovno pojavljuje vrijednost na stranicama volumena u
26
konvekcijskom članu te u neortogonalnoj korekciji difuzije. Odabirom odgovarajuće metode
interpolacije dobija se sljedeći izgled konvekcijskog člana:
, ( 72 )
gdje je:
w – teţinski faktor odabrane interpolacije.
Moguće je da se uz jednadţbu (72) još pojavi i odreĎena korekcija (npr. uzvodno linearna
shema) koja je eksplicitno rješena. Ako se grupiraju članovi uz i dobijamo sljedeći izgled
jednadţbe, [15]:
, ( 73 )
gdje je:
– dijagonalni koeficijenti matrice,
– koeficijenti matrice uz dijagonalu,
–izvorski član koji uključuje vremensku derivaciju prošlog vremenskog koraka, neortogonalnu
korekciju difuznog člana, korekciju interpolacijske sheme konvekcijskog člana i gradijent tlaka.
Ako se uvede operator koji uključuje sve koeficijente uz dijagonalu te njihove pripadne
brzine i izvorski član isključujući gradijent tlaka, dobija se jednadţba:
, ( 74 )
ili
. ( 75 )
3.3.2 Jednadžba očuvanja mase
Diskretizacija jednadbe kontinuiteta vrši se pomoću Gauss-ovog teorema:
∫ . ( 76 )
Ako se iz jednadţbe (74) izdvoji dobija se sljedeći oblik:
( 77 )
Kako bi se jednadţba (77) uvrstila u jednadţbu očuvanja mase (76) potrebno je interpolirati na
stranice volumena, [8]:
, ( 78 )
gdje je:
– operater interpolacije sa središta na stranice odabranom shemom,
27
– operater interpolacije sa središta na stranice odabranom shemom s korekcijom na
slobodnoj površini zbog prekinutosti funkcije gustoće i dinamičkog tlaka, [8].
Konačno jednadţba tlaka glasi:
. ( 79 )
Pomoću jednadţbe (78) je moguće izračunati volumenske protoke na stranicama:
(
) . ( 80 )
3.3.3 Diskretizacija jednadžbe tlaka
Tlak se u jednadţbama pojavljuje uvijek zajedno s inverznom vrijednosti gustoće . Skupa se
kao umnoţak pojavljuju na dva mjesta, [8]:
- izvorski član u jednadţbi količine gibanja ( ),
- divergencija gradijenta tlaka (Laplace-ov operator) u jednadţbi tlaka.
Gradijent tlaka se rješava odabranom metodom diskretizacije (Gaussov teorem ili metoda
najmanjih kvadrata), dok se Laplace-ov operator rješava slično kao difuzija s implicitnim
doprinosom i eksplicitnom neortogonalnom korekcijom.
Primjena „Ghost fluid“ metode
Prije same diskretizacije tlaka vaţno je opisati princip rada „Ghost fluid“ metode u kombinaciji s
„Volume of fluid“ metodom. Primjer je napravljen na 2-D mreţi, [17], a uzete su sljedeće
pretpostavke:
- ćelija P je ili potopljena ( ili suha ( ),
- ako je potopljena ćelija u potpunosti okruţena potopljenim ćelijama, diskretizacija tlaka
provodi se uobičajenim metodama jer se u blizini te ćelije ne nalazi slobodna površina.
Stranice ćelije koje zahtjevaju posebnu paţnju se nalaze negdje izmeĎu teţišta P i N, a
primijenjen je sljedeći kriterij za pronalaţenje takvih stranica:
. ( 81 )
Na slici 11. vidi se grafički prikaz označavanja slobodne površine gdje plava isprekidana linija
označava poloţaj slobodne površine, a crvena linija označava stranice slobodne površine. Nakon
označenih stranica potrebno je pronaći točan poloţaj slobodne površine koji je odreĎen
bezdimenzionalnim koeficijentom udaljenosti[17]:
. ( 82 )

28
Slika 11. Kriterij pronalaženja stranica slobodne površine [17]
Bezdimenzionalna udaljenost se koristi za pronalaţenje pozicije slobodne površine kao što je
prikazano na slici 12:
. ( 83 )
Slika 12. Lokacija slobodne površine između dvije ćelije P i N [17]
Dinamički tlak iz jednadţbe (26) u diskretizaciji ima sljedeći oblik, [17]:
= 𝜿 , ( 84 )
gdje je:
𝜿 - izračunata razlika dinamičkog tlaka koja se sprema za sve stranice slobodne površine u
danom vremenskom koraku.
Diskretizacija jednadţbe (28) vrši se na sljedeći način uz pretpostavku da je ćelija P potopljena
tj. ( :

29
=0. ( 85 )
Uvrštavanjem iz jednadţbe (84) nakon sreĎivanja dobiva se:
, ( 86 )
gdje je:
, ( 87 )
-teţinski koeficijent inverzne vrijednosti gustoće dobiven algebarskim sreĎivanjem jednadţbe.
Jednadţba (86) daje vrijednost tlaka infinitezimalno blizu slobodne površine sa strane vode, a s
tom vrijednosti moţe se ekstrapolirati vrijednost u teţištu susjedne ćelije:
. ( 88 )
Nakon uvrštavanja (86) u (88) i sreĎivanja slijedi [17]:
(
)
. ( 89 )
Ekstrapolirana vrijednost tlaka u jednadţbi (89) koristi se isključivo kod stranica ćelija koje su
označene prema (81) kao stranice slobodne površine.
U slučaju kada je ćelija P suha ( tada jednadţba (89) poprima drugačiji izgled:
(
)
, ( 90 )
gdje je u ovom slučaju:
. ( 91 )
Uz jednadţbu (89) dolazi pripadna jednadţba u slučaju ekstrapolacije iz ćelije N :
(
)
. ( 92 )
Uz jednadţbu (90) dolazi pripadna jednadţba u slučaju ekstrapolacije iz ćelije N :
(
)
. ( 93 )
Kada su definirani tlakovi u blizini slobodne površine potrebno je još definirati gustoću, [17]:
- gledajući iz potopljene ćelije,
, ( 94 )
- gledajući iz suhe ćelije,
. ( 95 )

30
Diskretizacija gradijenta tlaka s korekcijom zbog slobodne površine
S definiranom diskretizacijom skoka funkcije gustoće i funkcije tlaka moţe se prijeći na
definiciju diskretizacije gradijenta tlaka s obzirom na korekciju zbog slobodne površine koja u
slučaju potopljene ćelije P za metodu najmanjih kvadrata glasi, [17]:
(
) , ( 96 )
gdje prvi član s desne strane predstavlja standardnu diskretizaciju gradijenta tlaka, a drugi član
korekciju s obzirom na slobodnu površinu. Uvrštavanjem (89) u sumu drugog člana:
(
)
, ( 97 )
gdje je zbog ekstrapolacije iz potopljene ćelije P prema (94).
Diskretizacija Laplace operatora s korekcijom zbog slobodne površine
Implicitni dio jednadţbe tlaka (opet za slučaj potopljene ćelije P) glasi [17]:
(
) | |
| |
(
) | |
| | (
) | |
| | ( 98 )
Ako opet se uvrsti (89) u drugu sumu s desne strane dobiva se:
(
) | |
| | (
)
| |
| |
( 99 )
Izrazi (98) i (96) vrijede za doprinos ćelije „susjeda“ N prema ćeliji „vlasnika“ P. Izrazi bi
izgledali slično tj. obratno za doprinos ćelije P prema ćeliji N jedino što bi korištena vrijednost
pri korekciji tlaka bila
te bi se koristila obratna vrijednost za gustoću jer ona ovisi iz koje
ćelije se gleda. Više detalja o diskretizaciji tlaka moţe se pronaći u [8] i [17].
3.3.4 Diskretizacija indikatorske funkcije
Jednadţba indikatorske funkcije (16) sastoji se od 3 člana [18]:
. ( 100 )
Kompresijska brzina uvijek ima smjer normale na slobodnu površinu, a iz izraza je očito da
kada je ili kompresijska brzina nema utjecaja jer je cijeli član u tom slučaju jednak
nuli. Kontinuiranost kinematske viskoznosti dobija se jednadţbom (23), a gustoća se uzima bez
aproksimacija prema izrazima (94) i (95).

31
Diskretizacija vremenskog člana vrši se Euler-ovom metodom prvog reda točnosti, na isti način
kao u jednadţbi (52). Konvekcijski član diskretizira se Gaussovim teoremom, a interpolacije na
stranice volumena vrši se Van Leer metodom s eksplicitnom korekcijom. Van Leer metoda je u
suštini jednaka kao uzvodno linearna shema (implicitno prvi red točnosti, eksplicitna korekcija
za drugi red točnosti) samo s strogom ograničenošću varijable izmeĎu 0 i 1 odreĎenim
limitirajućim funkcijama. Detaljno o Van Leer numeričkoj shemi koja pripada TVD („Total
Variation Diminished“) shemama moţe se pronaći u [19], a o različitim numeričkim shemama
opširno se moţe naći u [7], [14] i [15].
Posljednji član u jednadţbi naziva se kompresijski član, a on se diskretizira na sljedeći način
koristeći Gauss-ov teorem, [18]:
∫ ( )
¸ ( 101 )
gdje je:
– (m3/s) volumni protok koji ne postoji u prirodi već sluţi isključivo za kompresiju
indikatorske funkcije na što oštriji prijelazni sloj kako bi došlo do što manjeg razmazivanja
slobodne površine.
Kompresijska brzina prema [6] definirana je ovisno o fizikalnom protoku na slobodnoj
površini, ali u ovom radu formulirana je isključivo kao numerički parametar kojim se dobiva
ţeljena debljina prijelaznog sloja. Slijedi izraz, [18]:
| |
, ( 102 )
gdje je:
– kompresijska konstanta kojoj je uobičajena vrijednost jednaka 1,
– jedinični vektor normale na slobodnu površinu,
– kompresijski Courant- Friedrichs – Lewy broj, uobičajena vrijednost 0,5 ,
| | – udaljenost izmeĎu dva teţišta susjednih volumena (m),
– vremenski korak (s).
Interpolacija s teţišta na lice volumena vrši se na sljedeći način, [18]:
, ( 103 )
gdje je:
, ( 104 )
limitirajuća funkcija, gdje je:
– doprinos linearne interpolacije,
32
– doprinos uzvodne interpolacije,
– teţinska funkcija.
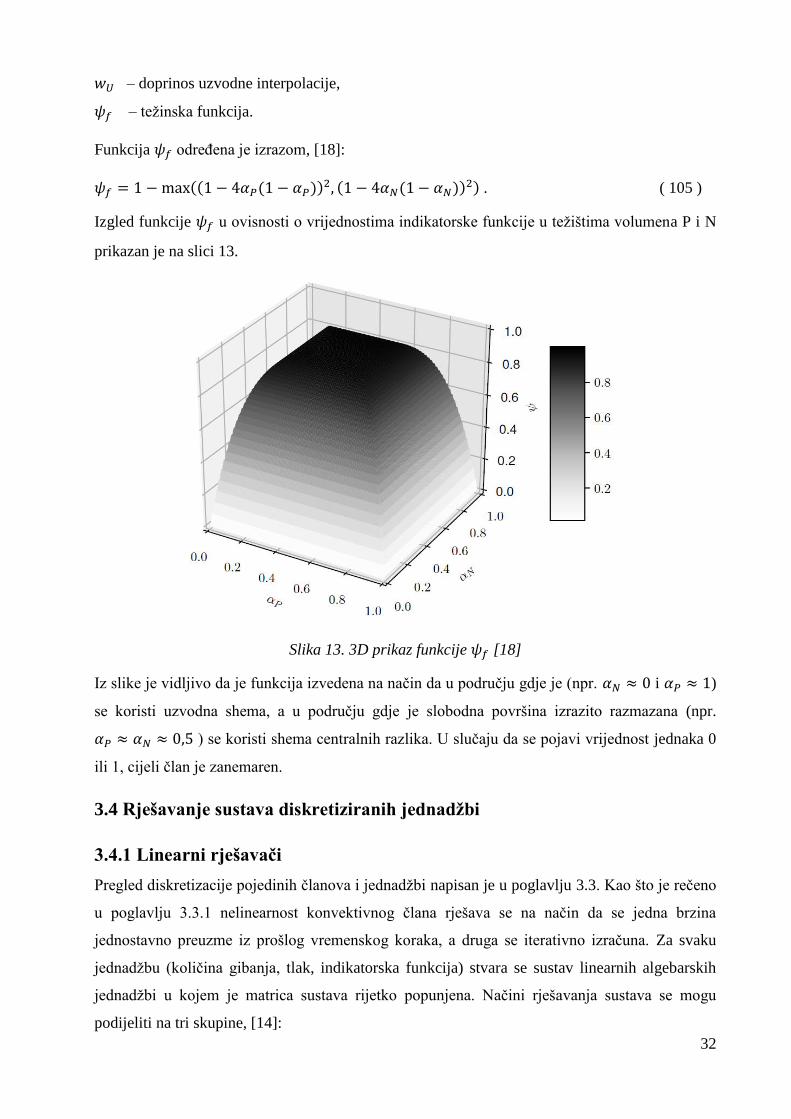
Funkcija odreĎena je izrazom, [18]:
. ( 105 )
Izgled funkcije u ovisnosti o vrijednostima indikatorske funkcije u teţištima volumena P i N
prikazan je na slici 13.
Slika 13. 3D prikaz funkcije [18]
Iz slike je vidljivo da je funkcija izvedena na način da u području gdje je (npr. i )
se koristi uzvodna shema, a u području gdje je slobodna površina izrazito razmazana (npr.
) se koristi shema centralnih razlika. U slučaju da se pojavi vrijednost jednaka 0
ili 1, cijeli član je zanemaren.
3.4 Rješavanje sustava diskretiziranih jednadžbi
3.4.1 Linearni rješavači
Pregled diskretizacije pojedinih članova i jednadţbi napisan je u poglavlju 3.3. Kao što je rečeno
u poglavlju 3.3.1 nelinearnost konvektivnog člana rješava se na način da se jedna brzina
jednostavno preuzme iz prošlog vremenskog koraka, a druga se iterativno izračuna. Za svaku
jednadţbu (količina gibanja, tlak, indikatorska funkcija) stvara se sustav linearnih algebarskih
jednadţbi u kojem je matrica sustava rijetko popunjena. Načini rješavanja sustava se mogu
podijeliti na tri skupine, [14]:
33
- direktne metode,
- iterativne metode,
- višemreţne metode.
Računalno vrijeme rješavanja sustava jednadţbi direktnim metodama je razmjerno kvadratu
broja jednadţbi dok je za iterativne metode pri rješavanju rijetkih matrica vrijeme rješavanja
razmjerno s . S obzirom da se radi o izrazito rijetkoj matrici, najpogodnije su za rješavanje
iterativne metode koje ne rješavaju direktno sustav jednadţbi već se temelje na inkrementalnom
poboljšavanju rješenja sustava u obliku, [14]:
, ( 106 )
gdje je:
k – broj iteracije,
– vektor korekcije rješenja.
Ako se izraz (105) uvrsti u izraz tada vrijedi:
, ( 107 )
gdje je:
– vektor ostatka (kada je jednak 0 tada je i korekcija jednaka 0 što znači da rješenje
zadovoljava sustav jednadţbi).
Naprednije iterativne metode rješavaju sustav oblika [14]:
, ( 108 )
gdje je:
– parametar kojim se postiţe minimizacija neke norme koja pokazuje koliko smo blizu
rješenju npr. kvadrat ostatka,
– vektor smjera u kojem se traţi poboljšanje rješenja.
U skupinu naprednih metoda spada metoda konjugiranih integrala [20] koja je korištena u sklopu
programskog paketa OpenFOAM pri rješavanju jednadţbe tlaka. Metoda se temelji na metodi
postupnog opadanja gradijenta, meĎutim za opisivanje metode potrebno je prvo matrični sustav
prikazati u kvadratnom obliku:
( 109 )
Ako je simetrična i pozitivno definitna ( za vektor x različit od nule) tada
je derivacija funkcije rješenje sustava. Svojstvo pozitivno definitne matrice osigurava
jedinstvenost rješenja, dok se svojstvom simetričnosti dolazi do jednadţbe:
34
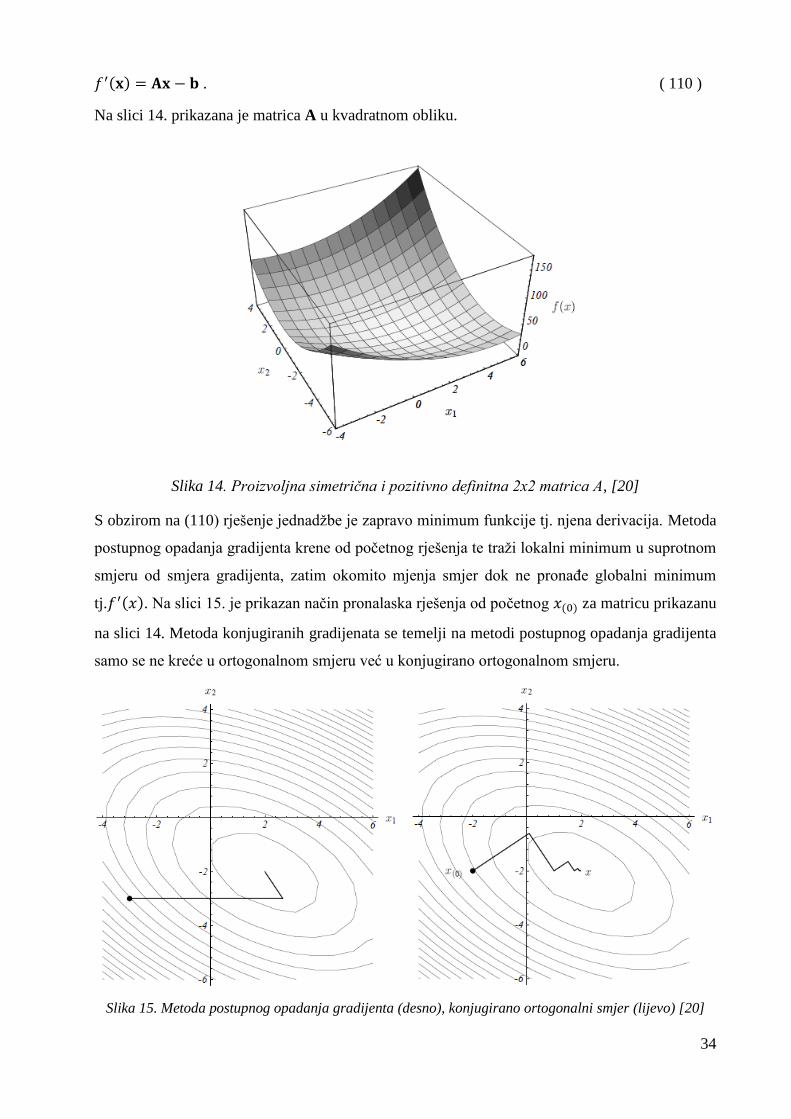
. ( 110 )
Na slici 14. prikazana je matrica A u kvadratnom obliku.
Slika 14. Proizvoljna simetrična i pozitivno definitna 2x2 matrica A, [20]
S obzirom na (110) rješenje jednadţbe je zapravo minimum funkcije tj. njena derivacija. Metoda
postupnog opadanja gradijenta krene od početnog rješenja te traţi lokalni minimum u suprotnom
smjeru od smjera gradijenta, zatim okomito mjenja smjer dok ne pronaĎe globalni minimum
tj. . Na slici 15. je prikazan način pronalaska rješenja od početnog za matricu prikazanu
na slici 14. Metoda konjugiranih gradijenata se temelji na metodi postupnog opadanja gradijenta
samo se ne kreće u ortogonalnom smjeru već u konjugirano ortogonalnom smjeru.
Slika 15. Metoda postupnog opadanja gradijenta (desno), konjugirano ortogonalni smjer (lijevo) [20]

35
Konjugirano ortogonalni smjer puno je lakše shvatiti pogledom na sliku 16. Ako se elipsoidni
oblik kontura „stisne“ tako da konture postanu kruţnice (desna strana slike), vektori će biti
meĎusobno ortogonalni što znači da su konjugirano ortogonalni vektori meĎusobno okomiti u
prostoru kojeg odreĎuje matrica A.
Slika 16. Konjugirano ortgonalni vektori [20]
Iz slike 15. vidiljivo je da je potreban manji broj iteracija u slučaju konjugirano ortogonalnog
smjera pronalaska rješenja zbog čega se koriste za velike i rijetke matrice A. Detaljan izvod i
opis cijele metode konjugiranih gradijenata za n – dimenzija opisan je u [20].
Uz napredne metode je vezan pojam preduvjetovanja (engl. „preconditioning“) gdje se stvara
nova matrica M koja treba biti dobra aproksimacija matrice A, a osnovni zahtjev za izbor
matrice M je da se sustav lako rješava. Za metodu konjugiranih gradijenata se gotovo
uvijek koristi preduvjetovanje kao što je naprimjer Cholesky faktorizacija koja matricu A
pretvara u formu LLT gdje je L donje trokutasta matrica.
Vaţno je napomenuti da u slučaju iterativnog rješavanja matrica sustava mora biti dijagonalno
dominantna. Dijagonalna dominantnost matrice odreĎena je sljedećim uvjetima, [15]:
- iznos dijagonalnih koeficijenata mora biti barem jednak ili veći od sume koeficijenata uz
dijagonalu,
- | | | | mora vrijediti za barem jedan red matrice.
Kada je izvorski član negativan, kako bi se povećala dijagonalna dominantnost matrice, on se
pridodaje dijagonalnom koeficijentu.

36
3.4.2 Kombinacija SIMPLE i PISO algoritma rješavanja
SIMPLE i PISO algoritmi rješavanja se zasebno mogu pronaći u gotovo svakom priručniku
komercijalnih kodova računalne dinamike fluida te su navedeni u brojnoj literaturi. Iz tog
razloga u ovom radu biti će navedena kombinacija ova dva algoritma koja je korištena u
računalnom paketu OpenFOAM. Popularni naziv je PIMPLE algoritam, a zbog jednostavnosti
biti će ponovno napisane sve jednadţbe algoritma, a s obzirom da se rješava turbulentno
strujanje podrazumijeva se da su brzine osrednjene u jednadţbama:
- Navier – Stokes jednadţba,
, ( 111 )
- jednadţba očuvanja mase (jednadţba tlaka),
, ( 112 )
- jednadţba indikatorske funkcije,
| |
, ( 113 )
- volumni protoci,
(
) , ( 114 )
- eksplicitni izraz za brzinu,
, ( 115 )
- kinematička viskoznost,
, ( 116 )
- kriterij označavanja lica slobodne površine,
. ( 117 )
Algoritam započinje s rješenjima iz prošlog vremenskog koraka ili iz početnih uvjeta. Vanjska
(SIMPLE) petlja vrši spregu indikatorske funkcije, vektorskog polja brzine i polja dinamičkog
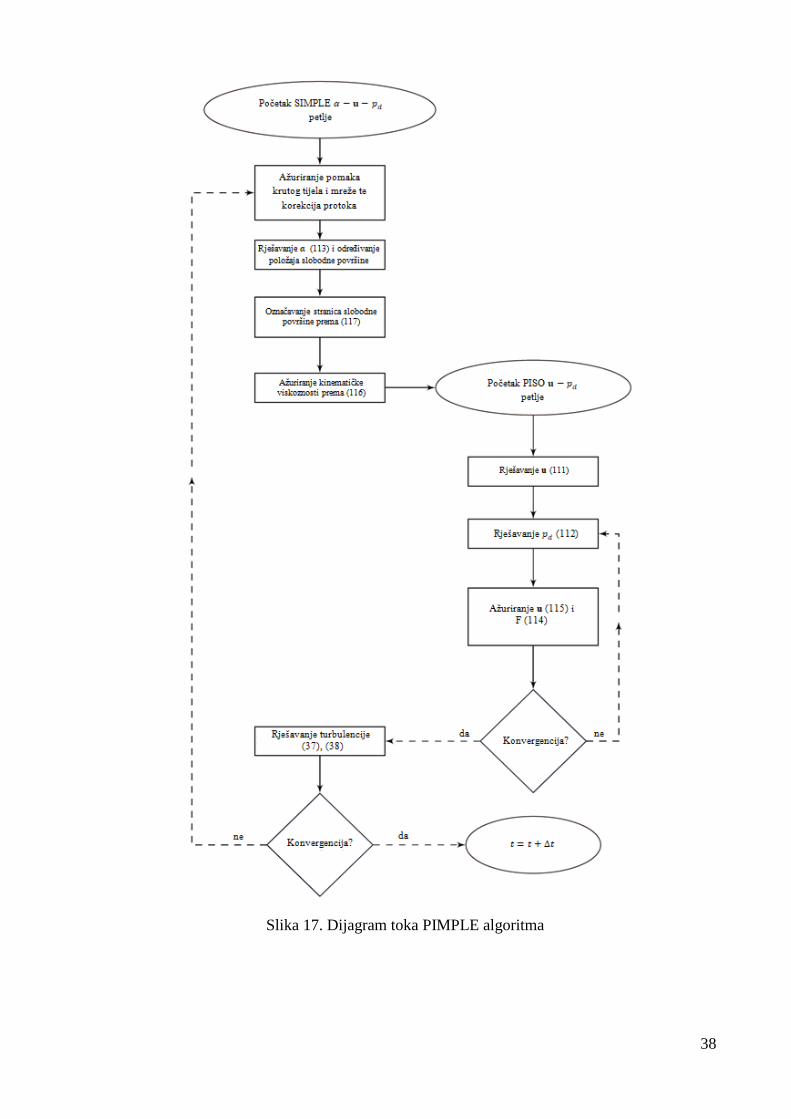
tlaka. Tijek PIMPLE algoritma:
1. aţuriranje pomaka krutog tijela s obzirom na djelovanje sile fluida na tijelo, pomak
mreţe te korekcija protoka zbog pomaka i promjene oblika mreţe
2. rješavanje jednadţbe indikatorske funkcije (113) te odreĎivanje poloţaja slobodne
površine s obzirom na rješenje polja strujanja iz prošlog vremenskog koraka
3. označavanje graničnih stranica nove pozicije slobodne površine prema (117) zbog
korekcije dinamičkog tlaka koja mora uslijediti na tim licima
37
4. aţuriranje kinematičke viskoznosti (116) na volumenima u prijelaznom sloju blizu
slobodne površine
5. PISO petlja – sprega brzine i tlaka
a. Rješavanje Navier – Stokes jednadţbe (111) s vrijednostima tlaka iz prošlog
vremenskog koraka. Time se dobiju se protoci koji ne zadovoljavaju jednadţbu
očuvanja mase
b. Rješavanje jednadţbe tlaka (112) preko proračunatih brzina iz prethodnog koraka
uz korekcije na slobodnoj površini (GFM). Izračunavaju se novi protoci s
dobivenim poljem tlaka (114). Iz protoka (vrijednosti na licima) se rekonstruira
polje brzine (vrijednost u teţištu kontrolnog volumena) pomoću kojeg se korigira
operator .
c. U jednadţbi (115) utjecaj na promjenu brzine ima gradijent tlaka (koristi se novi
tlak iz prethodnog koraka) i operator koji je ispravljen takoĎer u prošlom
koraku. Ekslicitno se korigira polje brzine (115) te se izračunaju novi volumni
protoci interpolacijom s teţišta na lice dok nije postignuta konvergencija. Koraci
b) i c) se uzastopno ponavljaju do konvergencije.
6. Rješavanje turublencije (37), (38)
U rješavaču se mogu koristiti i podrelaksacijski faktori preko kojih se samo dio rješenja uzima
npr. eksplicitna podrelaksacija tlaka glasi:
, ( 118 )
gdje je:
– izračunati novi tlak ,
– relaksacijski faktor.
MeĎutim s obzirom da se radi o nestracionarnom strujanju te su uvedene odreĎene korekcije na
slobodnoj površini relaksacijski faktori za brzinu i tlak će biti jednak jedinici tj. neće se koristiti
rješenje iz prošlog vremenskog koraka već će se uvijek uzimati novo rješenje u cjelini. Na slici
17. prikazan je dijagram toka navedenog algoritma.
38
Slika 17. Dijagram toka PIMPLE algoritma
39
4. PROVEDBA SIMULACIJE
4.1 Struktura OpenFOAM-a
Programski paket OpenFOAM poprilično se razlikuje od standardnih komercijalnih CFD paketa.
Prva i osnovna razlika je otvoren kod u C++ programskom jeziku koji pruţa korisniku uvid u
rješavanje sustava jednadţbi. Program nema nikakvo grafičko sučelje za korisnika te je njegovo
korištenje optimizirano na Linux operativnom sustavu čime nije korisnički usmjeren. Prednost je
velik broj optimiziranih alata koji se nalaze unutar bliblioteke OpenFOAM-a kao naprimjer
metoda konjugiranih gradijenata, metoda najmanjih kvadrata itd. Sve je upravljano iz
„Terminala“ te je za njegovo korištenje prvi korak naučiti barem osnovnu sintaksu Linux-a.
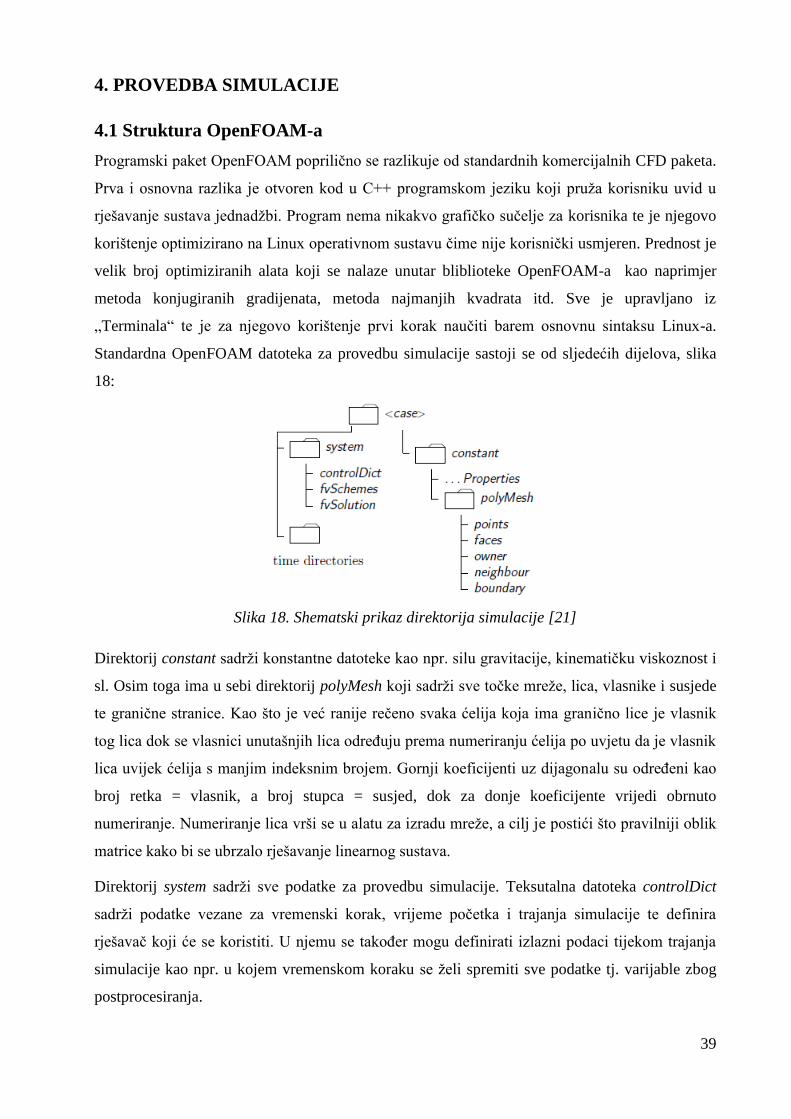
Standardna OpenFOAM datoteka za provedbu simulacije sastoji se od sljedećih dijelova, slika
18:
Slika 18. Shematski prikaz direktorija simulacije [21]
Direktorij constant sadrţi konstantne datoteke kao npr. silu gravitacije, kinematičku viskoznost i
sl. Osim toga ima u sebi direktorij polyMesh koji sadrţi sve točke mreţe, lica, vlasnike i susjede
te granične stranice. Kao što je već ranije rečeno svaka ćelija koja ima granično lice je vlasnik
tog lica dok se vlasnici unutašnjih lica odreĎuju prema numeriranju ćelija po uvjetu da je vlasnik
lica uvijek ćelija s manjim indeksnim brojem. Gornji koeficijenti uz dijagonalu su odreĎeni kao
broj retka = vlasnik, a broj stupca = susjed, dok za donje koeficijente vrijedi obrnuto
numeriranje. Numeriranje lica vrši se u alatu za izradu mreţe, a cilj je postići što pravilniji oblik
matrice kako bi se ubrzalo rješavanje linearnog sustava.
Direktorij system sadrţi sve podatke za provedbu simulacije. Teksutalna datoteka controlDict
sadrţi podatke vezane za vremenski korak, vrijeme početka i trajanja simulacije te definira
rješavač koji će se koristiti. U njemu se takoĎer mogu definirati izlazni podaci tijekom trajanja
simulacije kao npr. u kojem vremenskom koraku se ţeli spremiti sve podatke tj. varijable zbog
postprocesiranja.
40
Direktorij time sadrţi podatke o varijablama. Simulacije započinje najčešće samo s jednim
folderom 0 koji označava početno vrijeme. U tom folderu se zapisuju rubni uvjeti za brzinu, tlak
itd. U slučaju kada se ţeli zapisati u nekom vremenskom koraku sve varijable (definirano u
controlDict-u ) stvara se novi folder npr. 5 (označava petu sekundu simulacije) u kojem se
spremaju vrijednosti svih varijabli u datom trenutku.
4.2 Predprocesor
Faza predprocesora odnosi se na izradu geometrijske mreţe kontrolnih volumena koja bi trebala
dovoljno kvalitetno opisivati zadani problem optjecanja plovnog objekta. Proces se moţe
podijeliti na dva glavna koraka:
- priprema geometrije trupa broda
- izrada mreţe konačnih volumena
4.2.1 Priprema geometrije trupa
Geometrija trupa preuzeta je s [22], a ime broda je „KRISO Container Ship“ - KCS. Riječ je o
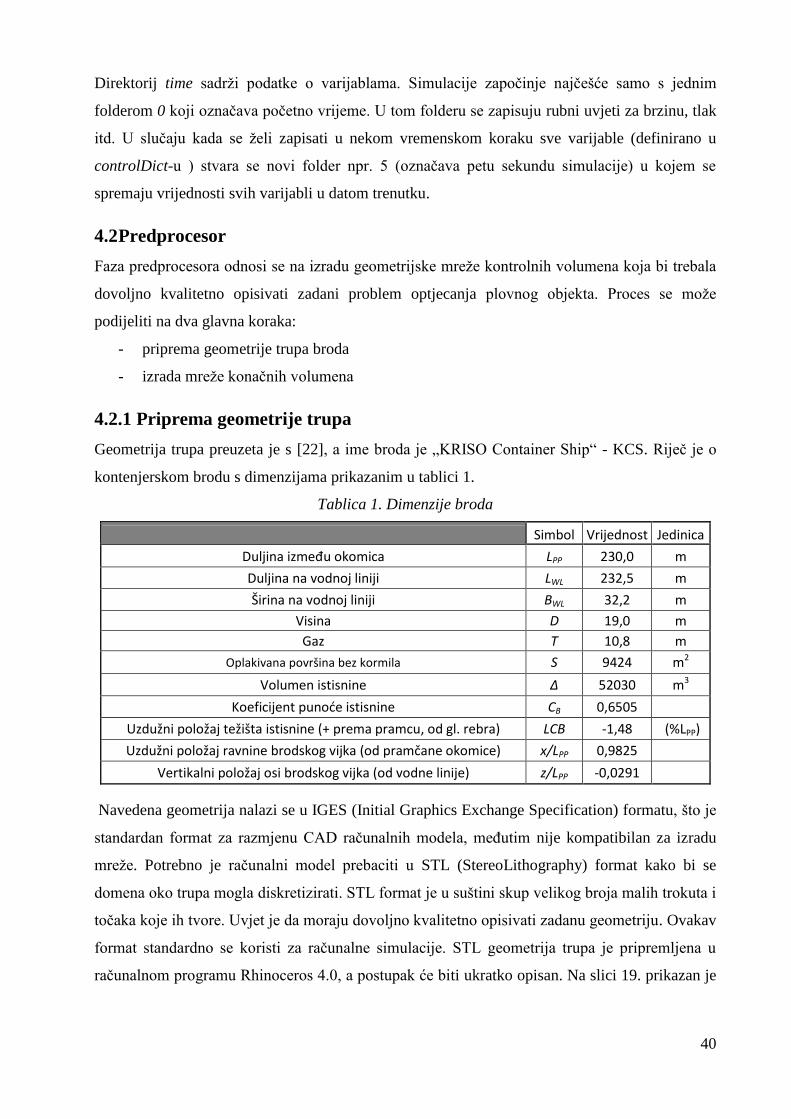
kontenjerskom brodu s dimenzijama prikazanim u tablici 1.
Tablica 1. Dimenzije broda
Simbol Vrijednost Jedinica
Duljina između okomica LPP 230,0 m
Duljina na vodnoj liniji LWL 232,5 m
Širina na vodnoj liniji BWL 32,2 m
Visina D 19,0 m
Gaz T 10,8 m
Oplakivana površina bez kormila S 9424 m2
Volumen istisnine Δ 52030 m3
Koeficijent punode istisnine CB 0,6505
Uzdužni položaj težišta istisnine (+ prema pramcu, od gl. rebra) LCB -1,48 (%LPP)
Uzdužni položaj ravnine brodskog vijka (od pramčane okomice) x/LPP 0,9825
Vertikalni položaj osi brodskog vijka (od vodne linije) z/LPP -0,0291
Navedena geometrija nalazi se u IGES (Initial Graphics Exchange Specification) formatu, što je
standardan format za razmjenu CAD računalnih modela, meĎutim nije kompatibilan za izradu
mreţe. Potrebno je računalni model prebaciti u STL (StereoLithography) format kako bi se
domena oko trupa mogla diskretizirati. STL format je u suštini skup velikog broja malih trokuta i
točaka koje ih tvore. Uvjet je da moraju dovoljno kvalitetno opisivati zadanu geometriju. Ovakav
format standardno se koristi za računalne simulacije. STL geometrija trupa je pripremljena u
računalnom programu Rhinoceros 4.0, a postupak će biti ukratko opisan. Na slici 19. prikazan je
41
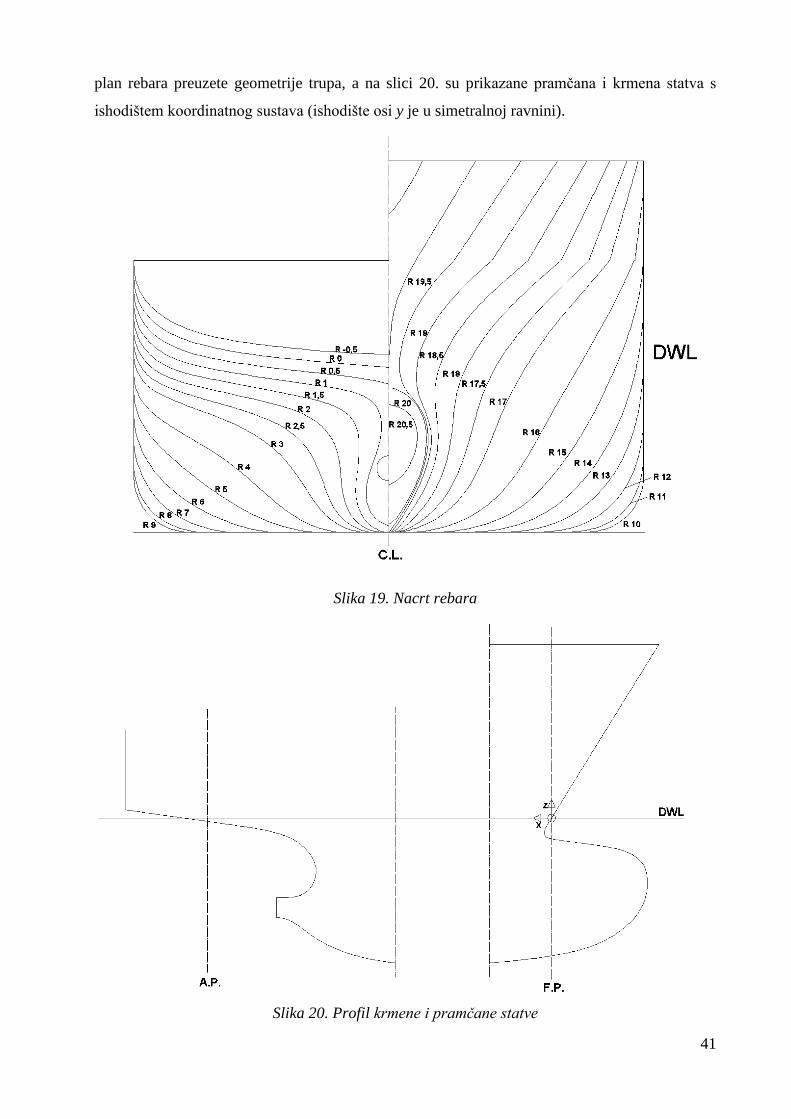
plan rebara preuzete geometrije trupa, a na slici 20. su prikazane pramčana i krmena statva s
ishodištem koordinatnog sustava (ishodište osi y je u simetralnoj ravnini).
Slika 19. Nacrt rebara
Slika 20. Profil krmene i pramčane statve
42
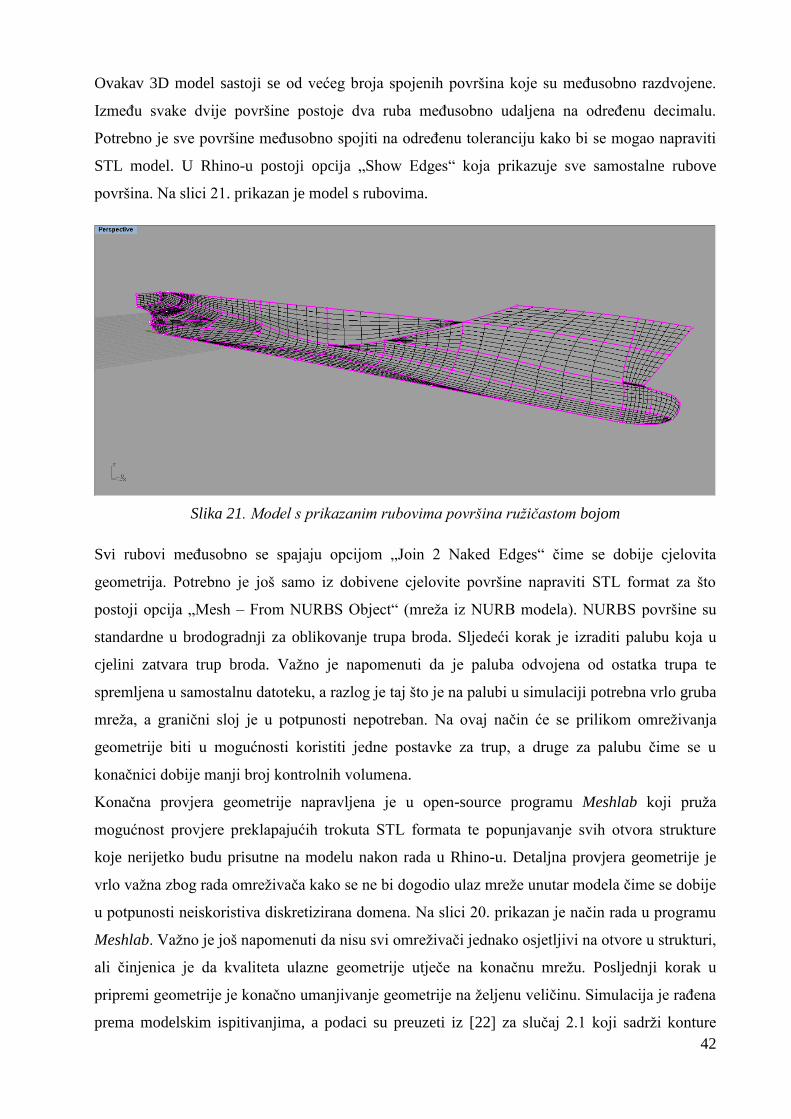
Ovakav 3D model sastoji se od većeg broja spojenih površina koje su meĎusobno razdvojene.
IzmeĎu svake dvije površine postoje dva ruba meĎusobno udaljena na odreĎenu decimalu.
Potrebno je sve površine meĎusobno spojiti na odreĎenu toleranciju kako bi se mogao napraviti
STL model. U Rhino-u postoji opcija „Show Edges“ koja prikazuje sve samostalne rubove
površina. Na slici 21. prikazan je model s rubovima.
Slika 21. Model s prikazanim rubovima površina ružičastom bojom
Svi rubovi meĎusobno se spajaju opcijom „Join 2 Naked Edges“ čime se dobije cjelovita
geometrija. Potrebno je još samo iz dobivene cjelovite površine napraviti STL format za što
postoji opcija „Mesh – From NURBS Object“ (mreţa iz NURB modela). NURBS površine su
standardne u brodogradnji za oblikovanje trupa broda. Sljedeći korak je izraditi palubu koja u
cjelini zatvara trup broda. Vaţno je napomenuti da je paluba odvojena od ostatka trupa te
spremljena u samostalnu datoteku, a razlog je taj što je na palubi u simulaciji potrebna vrlo gruba
mreţa, a granični sloj je u potpunosti nepotreban. Na ovaj način će se prilikom omreţivanja
geometrije biti u mogućnosti koristiti jedne postavke za trup, a druge za palubu čime se u
konačnici dobije manji broj kontrolnih volumena.
Konačna provjera geometrije napravljena je u open-source programu Meshlab koji pruţa
mogućnost provjere preklapajućih trokuta STL formata te popunjavanje svih otvora strukture
koje nerijetko budu prisutne na modelu nakon rada u Rhino-u. Detaljna provjera geometrije je
vrlo vaţna zbog rada omreţivača kako se ne bi dogodio ulaz mreţe unutar modela čime se dobije
u potpunosti neiskoristiva diskretizirana domena. Na slici 20. prikazan je način rada u programu
Meshlab. Vaţno je još napomenuti da nisu svi omreţivači jednako osjetljivi na otvore u strukturi,
ali činjenica je da kvaliteta ulazne geometrije utječe na konačnu mreţu. Posljednji korak u
pripremi geometrije je konačno umanjivanje geometrije na ţeljenu veličinu. Simulacija je raĎena
prema modelskim ispitivanjima, a podaci su preuzeti iz [22] za slučaj 2.1 koji sadrţi konture
43
valova na različitim presjecima, sliku polja sustrujanja i sl. Za umanjivanje STL modela
korištena je funkcija koja je dio OpenFOAM biblioteke, a glasi:
surfaceTransformPoints –scale „(1/31,6 1/31,6 1/31,6)“
hull.stl hullScaled.stl
Prva riječ (surfaceTransformPoints) označava korištenu aplikaciju, a „scale“ korištenu funkciju.
Brojevi u navodnim znakovima označavaju osi redom X, Y i Z po kojima je umanjena geometrija
za 31,6 (mjerilo modela) kako bi se dobila duţina, širina i visina modela po svim osima. Zadana
duljina modela izmeĎu okomica je 7,2786 m. Jednak postupak napravljen je za geometriju
palube.
4.2.2 Izrada mreže konačnih volumena
Diskretizacija domene metodom konačnih volumena napravljena je u programskom alatu
SnappyHexMesh uz pomoć TopoSet i RefineMesh alata. Sva tri alata su standardni dio
OpenFOAM 4.1 programskog paketa koji je korišten, a o njima će biti detaljnije u narednom
tekstu. Svaka naredba pokreće se iz terminala koji čita tekstualnu datoteku korištenog alata.
Potrebno je još definirati SurfaceFeatureExtract (definira rubove geometrije), MeshQuality
(odreĎuje ţeljene parametre kvalitete mreţe npr. maksimalna zakrivljenost ćelije) i BlockMesh
(izrada okolne mreţe) naredbe u pripadajuće tekstualnu datoteke. Geometrija se smješta u mapu
constant/trisurface iz kojega svi navedeni alati čitaju podatke.
Izrada mreţe moţe se podijeliti u pet dijelova:
1. okolna mreţa,
2. nazubljena faza – castellated,
3. anizotropno profinjavanje mreţe u području slobodne površine,
4. prianjajuća faza – snap,
5. izrada graničnog sloja – addLayers,
Prva faza je dio BlockMesh-a, druga, četvrta i peta faza dio su SnappyHexMesh-a, a treća faza
vrši se preko TopoSet-a i RefineMesh-a. Prvi i najvaţniji korak je definirati controlDict datoteku
kako bi se pravilno spremala svaka meĎufaza (namjesti se application – snappyHexMesh).
Okolna mreža
Okolna mreţa napravljena je u alatu BlockMesh koji pravi strukturiranu mreţu od pravilnih
heksaedara. Ako je moguće, najbolje je da okolna mreţa bude napravljena od kocaka. TakoĎer, u
ovom trenutku imenuju se granice domene. Na slici 22. prikazan je primjer okolne mreţe
(Napomena: za sve vizualizacije korišten je OpenSource program ParaView).
44
Slika 22. Okolna mreža
Nazubljena faza („castellated“)
Na početku SnappyHexMesh datoteke (moţe se preuzeti datoteka iz tutoriala incompressible/
simpleFoam/motorBike) postavi se castellated true, a druge dvije faze snap i addlayers na false.
U slučaju da SnappyHexMesh nije definiran u controlDict-u ne bi bilo moguće pravilno nastaviti
druge dvije faze nakon prve što je neophodno. U castellated fazi definiraju se geometrije koje se
ţele omreţiti te zone koje se ţele dodatno profiniti. SnappyHexMesh nudi samo volumetrijsko
profinjavanje u sva tri smjera (izotropno) te na tri različita načina [23]:
- „inside“ – profinjavanje mreţe unutar zadane geometrije,
- „outside“ – profinjavanje mreţe izvan zadane geometrije,
- „distance― – profinjavanje mreţe s obzirom na udaljenost od zadane geometrije.
Mogu se koristiti jednostavni oblici kao npr. kocka ili kugla u sklopu Snappy-a, ali u slučaju ako
je potreban drugačiji oblik (npr. Kelvinov kut) potrebno je napraviti odvojen STL file koji se
imenuje u Snappy-u te se označi ţeljen način profinjavanja od tri moguća. Za model broda
korišteno je profinjavanje s obzirom na udaljenost u nekoliko različitih razina, dok se nije dobila
zadovoljavajuća finoća mreţe uz trup modela. Za sva ostala područja (bulb, krmena statva,
Kelvinov kut) korišteno je profinjavanje unutar zadane geometrije. Na slici 23. je prikazan
princip profinjavanja mreţe.
Slika 23. Princip profinjavanja mreže [22]
Vrlo vaţan korak u ovoj fazi je u samom kraju Snappy-a upisati sljedeću naredbu:
45
write flags
{ scalarLevels layerSets layerFields}
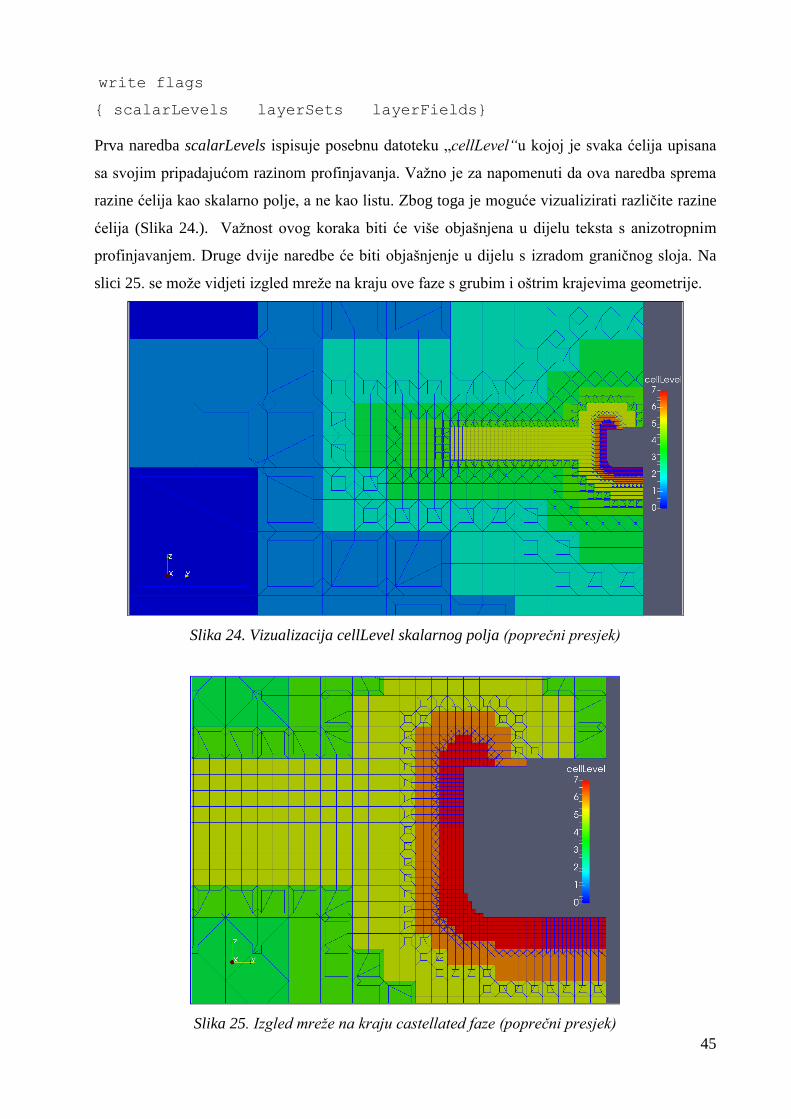
Prva naredba scalarLevels ispisuje posebnu datoteku „cellLevel―u kojoj je svaka ćelija upisana
sa svojim pripadajućom razinom profinjavanja. Vaţno je za napomenuti da ova naredba sprema
razine ćelija kao skalarno polje, a ne kao listu. Zbog toga je moguće vizualizirati različite razine
ćelija (Slika 24.). Vaţnost ovog koraka biti će više objašnjena u dijelu teksta s anizotropnim
profinjavanjem. Druge dvije naredbe će biti objašnjenje u dijelu s izradom graničnog sloja. Na
slici 25. se moţe vidjeti izgled mreţe na kraju ove faze s grubim i oštrim krajevima geometrije.
Slika 24. Vizualizacija cellLevel skalarnog polja (poprečni presjek)
Slika 25. Izgled mreže na kraju castellated faze (poprečni presjek)
46
Anizotropno profinjavanje mreže u području slobodne površine
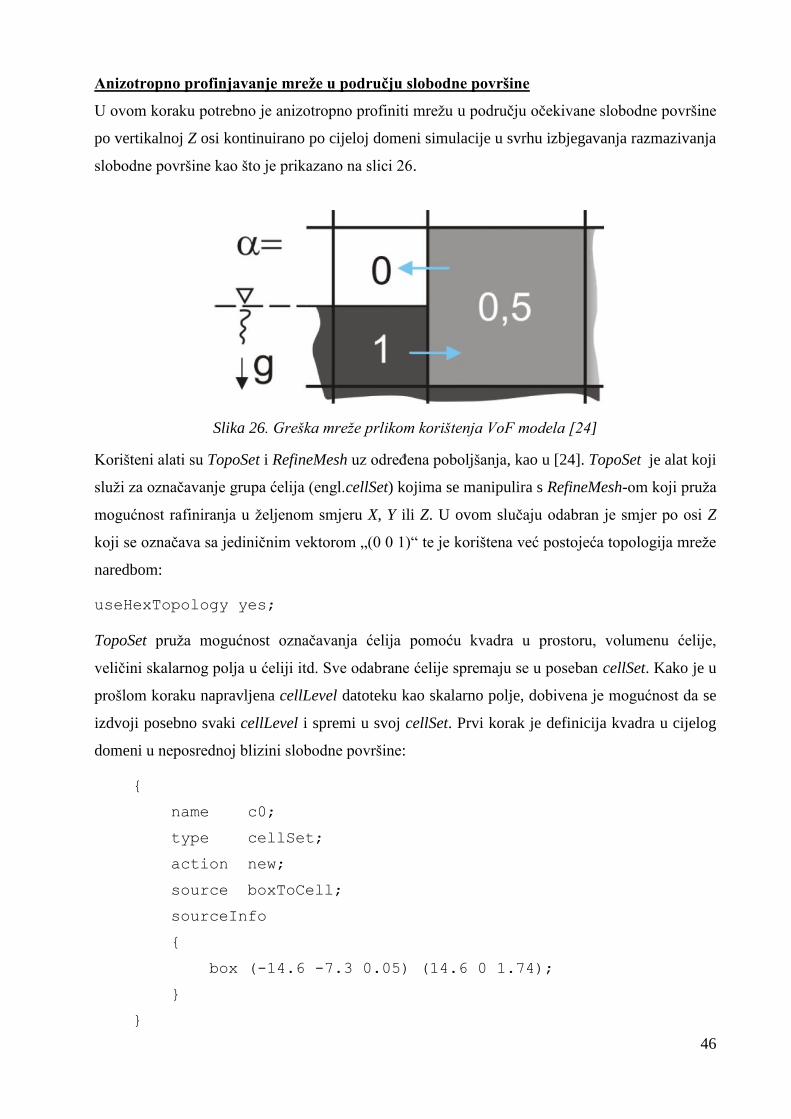
U ovom koraku potrebno je anizotropno profiniti mreţu u području očekivane slobodne površine
po vertikalnoj Z osi kontinuirano po cijeloj domeni simulacije u svrhu izbjegavanja razmazivanja
slobodne površine kao što je prikazano na slici 26.
Slika 26. Greška mreže prlikom korištenja VoF modela [24]
Korišteni alati su TopoSet i RefineMesh uz odreĎena poboljšanja, kao u [24]. TopoSet je alat koji
sluţi za označavanje grupa ćelija (engl.cellSet) kojima se manipulira s RefineMesh-om koji pruţa
mogućnost rafiniranja u ţeljenom smjeru X, Y ili Z. U ovom slučaju odabran je smjer po osi Z
koji se označava sa jediničnim vektorom „(0 0 1)“ te je korištena već postojeća topologija mreţe
naredbom:
useHexTopology yes;
TopoSet pruţa mogućnost označavanja ćelija pomoću kvadra u prostoru, volumenu ćelije,
veličini skalarnog polja u ćeliji itd. Sve odabrane ćelije spremaju se u poseban cellSet. Kako je u
prošlom koraku napravljena cellLevel datoteku kao skalarno polje, dobivena je mogućnost da se
izdvoji posebno svaki cellLevel i spremi u svoj cellSet. Prvi korak je definicija kvadra u cijelog
domeni u neposrednoj blizini slobodne površine:
{
name c0;
type cellSet;
action new;
source boxToCell;
sourceInfo
{
box (-14.6 -7.3 0.05) (14.6 0 1.74);
}
}
47
Sljedeći je korak koristiti funkciju fieldToCell koja daje mogućnost biranja ćelija s obzirom na
veličininu skalarnog polja u ćeliji:
{
name c0;
type cellSet;
action delete;
source fieldToCell;
sourceInfo
{
field cellLevel;
min 1;
max 8;
}
Ovim načinom postupak označavanja postaje puno jednostavniji, posebno u slučaju zakrivljenih
geometrija, čime se stvara velika ušteda vremena u označavanju ţeljenih kontrolnih volumena u
odnosu na [24] gdje su korišteni isključivo kvadri u prostoru za označavanje uz ručne i
dugotrajne provjere. Proces profinjavanja slobodne površine počinje od najvećih prema
najmanjim ćelijama dok se ne dobije ţeljena geometrija. Cijeli postupak je iterativan, što znači
da nakon svakog TopoSet označavanja ćelija slijedi RefineMesh. Problem je što se cellLevel
datoteka izbriše nakon rada RefineMesh-a te je potrebno svaki cellSet spremiti kao cellZone u
prvom TopoSet-u kako bi se moglo zadrţati označene ćelije tijekom iterativnog rada. Stoga je
sljedeći korak prebaciti cellSet u cellZone:
{
name zone0;
type cellZoneSet;
action new;
source setToCellZone;
sourceInfo
{
set c0;
}
}
Sada su označene sve ćelije s razinom usitnjenosti 0 pod nazivom zone0, a na isti način se
definiraju i ostale razine usitnjenosti (npr. za razinu usitnjenosti 2 će biti naziv zone2).
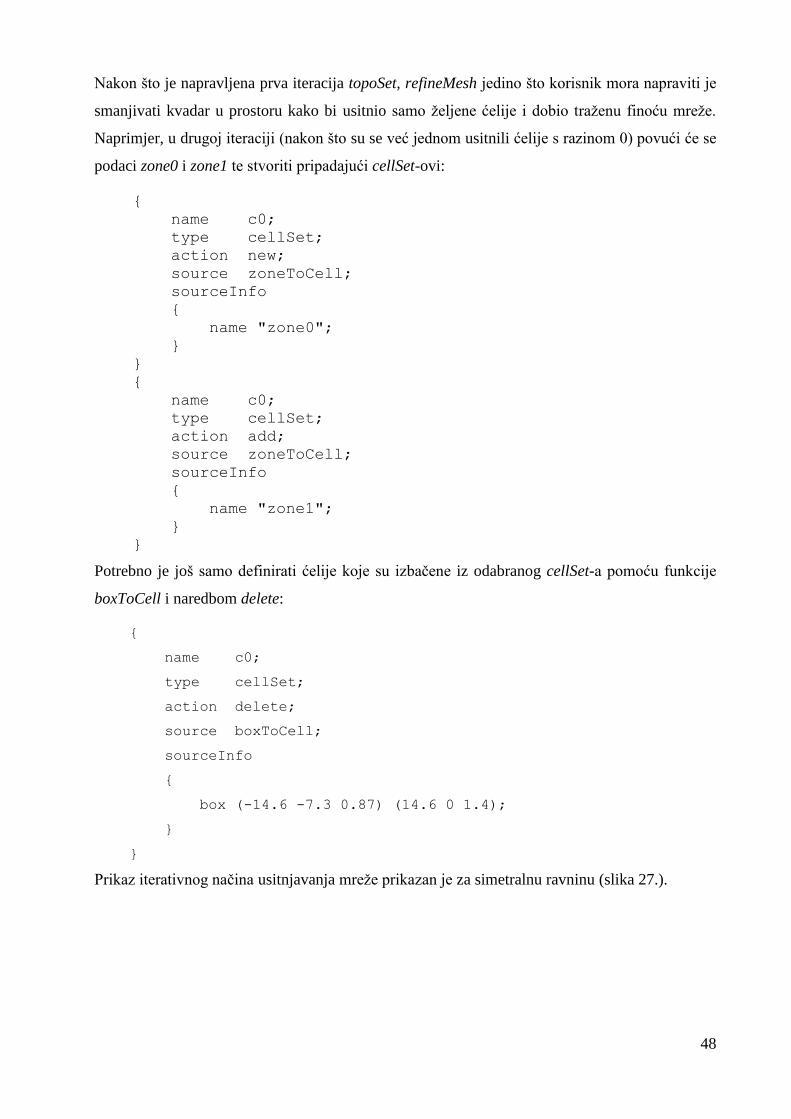
48
Nakon što je napravljena prva iteracija topoSet, refineMesh jedino što korisnik mora napraviti je
smanjivati kvadar u prostoru kako bi usitnio samo ţeljene ćelije i dobio traţenu finoću mreţe.
Naprimjer, u drugoj iteraciji (nakon što su se već jednom usitnili ćelije s razinom 0) povući će se
podaci zone0 i zone1 te stvoriti pripadajući cellSet-ovi:
{
name c0;
type cellSet;
action new;
source zoneToCell;
sourceInfo
{
name "zone0";
}
}
{
name c0;
type cellSet;
action add;
source zoneToCell;
sourceInfo
{
name "zone1";
}
}
Potrebno je još samo definirati ćelije koje su izbačene iz odabranog cellSet-a pomoću funkcije
boxToCell i naredbom delete:
{
name c0;
type cellSet;
action delete;
source boxToCell;
sourceInfo
{
box (-14.6 -7.3 0.87) (14.6 0 1.4);
}
}
Prikaz iterativnog načina usitnjavanja mreţe prikazan je za simetralnu ravninu (slika 27.).

49
Slika 27. Anizotropno profinjavanje mreže po vertikalnom presjeku
Prianjajuća faza („snap“)
Na početku SnappyHexMesh—a postavi se snap na true, a castellated i addlayers na false.
Najvaţnija izmjena s obzirom na uobičajene postavke je promjena implicitFeatureSnap na true,
a explicitFeatureSnap na false prema [25]. Pri korištenju implicitFeatureSnap-a se točke lijepe
na izvornu STL geometriju čime se bolje odrţavaju zakrivljenosti stvarne geometrije, dok se u
explicitFeatureSnap-u geometrija čita iz castellated faze te je sklonost pojavi greške u mreţi
veća u kompliciranim geometrijama. Ostale postavke snappyHexMeshDict-a neće biti dodatno
objašnjavane iz ove faze, a opširni opisi mogu se pronaći u [23] i [25]. Tijekom rada snap faze,
alat čita podatke iz meshQualityDict-a gdje se postavljaju uvjeti maksimalne neortogonalnosti
mreţe, maksimalne zakrivljenosti, konkavnosti itd. Objašnjenja za sve uvjete mogu se pronaći u
[23]. Zbog dugotrajnosti rada snappyHexMesh-a svi procesi vršeni su paralelno koristeći alat
decomposePar koji podijeli mreţu na poddomene te dodijeli svakoj jezgri procesora jednu pod-
domenu. Metoda dekompozicije domene je scotch koja dodijeli svakoj jezgri otprilike jednak
broj kontrolnih volumena u svrhu što uravnoteţenijeg rada. Kako bi se mogli vizualizirati podaci
deokompozirane simulacije potrebno je koristiti paraFoam –builtin čitač umjesto uobičajenog i
pri učitavanju simulacije koristiti Case Type: Decomposed. Na slici 28. moţe se vidjeti poprečni
presjek na finoj i gruboj mreţi na kraju snap faze.
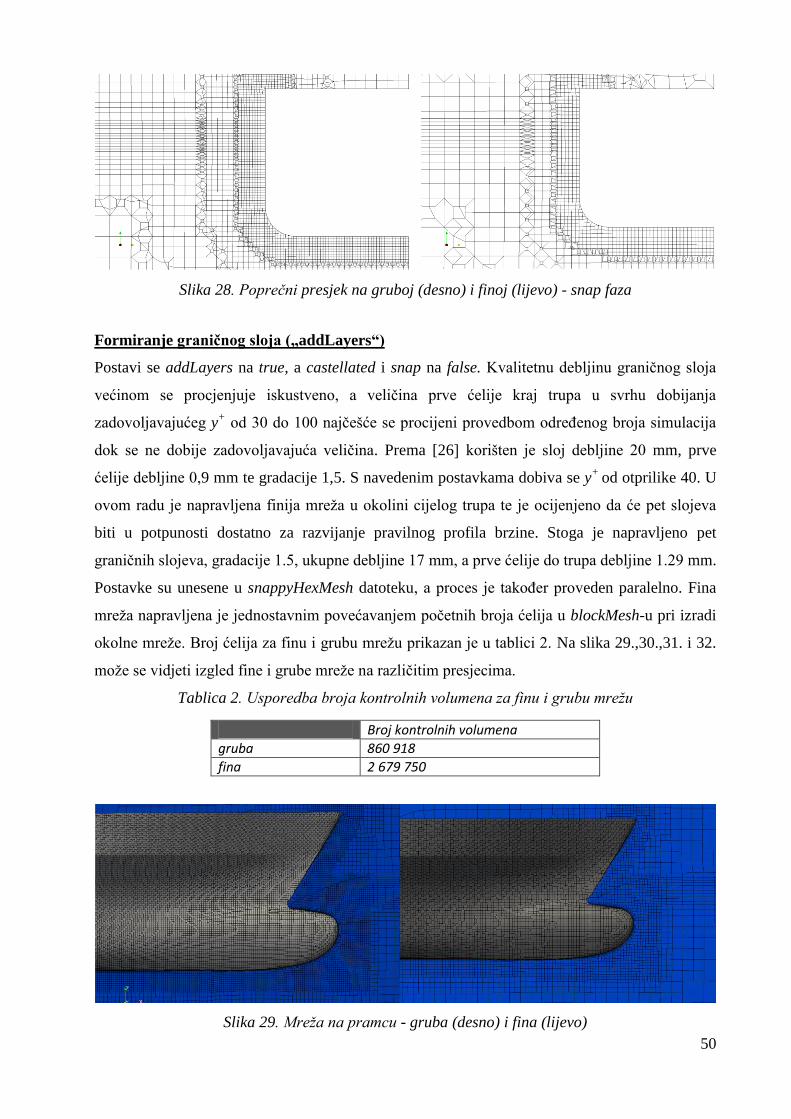
50
Slika 28. Poprečni presjek na gruboj (desno) i finoj (lijevo) - snap faza
Formiranje graničnog sloja („addLayers“)
Postavi se addLayers na true, a castellated i snap na false. Kvalitetnu debljinu graničnog sloja
većinom se procjenjuje iskustveno, a veličina prve ćelije kraj trupa u svrhu dobijanja
zadovoljavajućeg y+ od 30 do 100 najčešće se procijeni provedbom odreĎenog broja simulacija
dok se ne dobije zadovoljavajuća veličina. Prema [26] korišten je sloj debljine 20 mm, prve
ćelije debljine 0,9 mm te gradacije 1,5. S navedenim postavkama dobiva se y+
od otprilike 40. U
ovom radu je napravljena finija mreţa u okolini cijelog trupa te je ocijenjeno da će pet slojeva
biti u potpunosti dostatno za razvijanje pravilnog profila brzine. Stoga je napravljeno pet
graničnih slojeva, gradacije 1.5, ukupne debljine 17 mm, a prve ćelije do trupa debljine 1.29 mm.
Postavke su unesene u snappyHexMesh datoteku, a proces je takoĎer proveden paralelno. Fina
mreţa napravljena je jednostavnim povećavanjem početnih broja ćelija u blockMesh-u pri izradi
okolne mreţe. Broj ćelija za finu i grubu mreţu prikazan je u tablici 2. Na slika 29.,30.,31. i 32.
moţe se vidjeti izgled fine i grube mreţe na različitim presjecima.
Tablica 2. Usporedba broja kontrolnih volumena za finu i grubu mrežu
Broj kontrolnih volumena
gruba 860 918
fina 2 679 750
Slika 29. Mreža na pramcu - gruba (desno) i fina (lijevo)
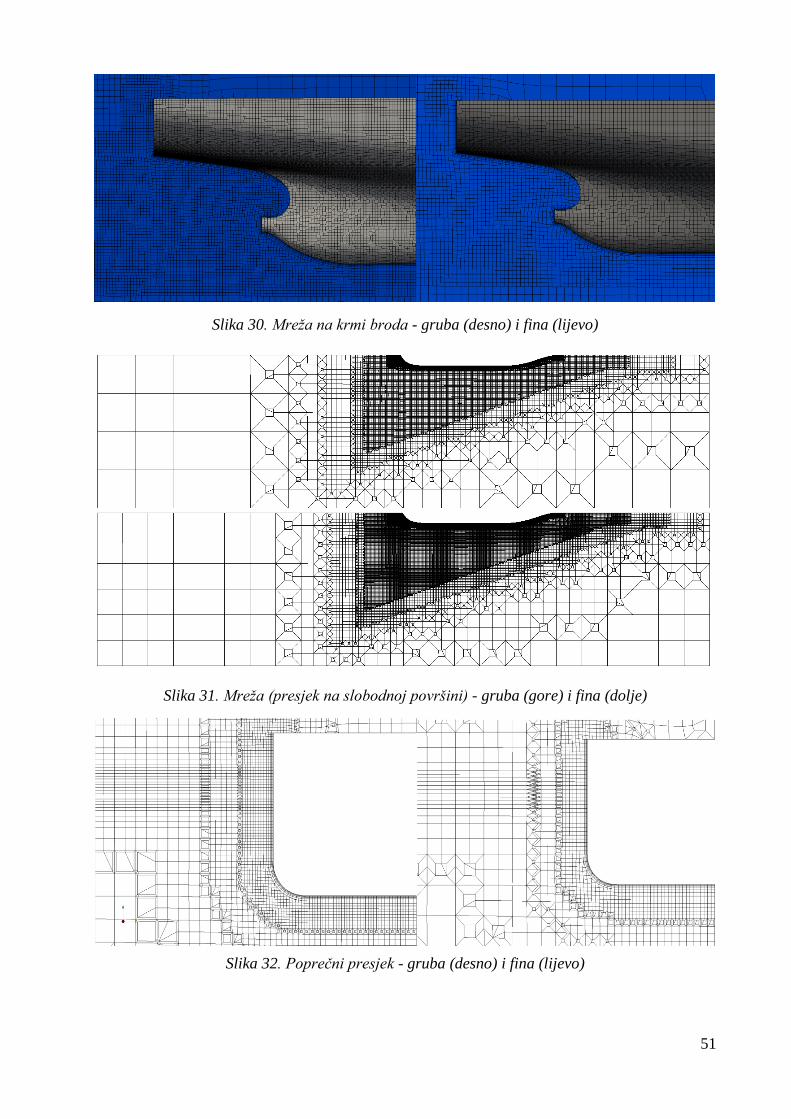
51
Slika 30. Mreža na krmi broda - gruba (desno) i fina (lijevo)
Slika 31. Mreža (presjek na slobodnoj površini) - gruba (gore) i fina (dolje)
Slika 32. Poprečni presjek - gruba (desno) i fina (lijevo)
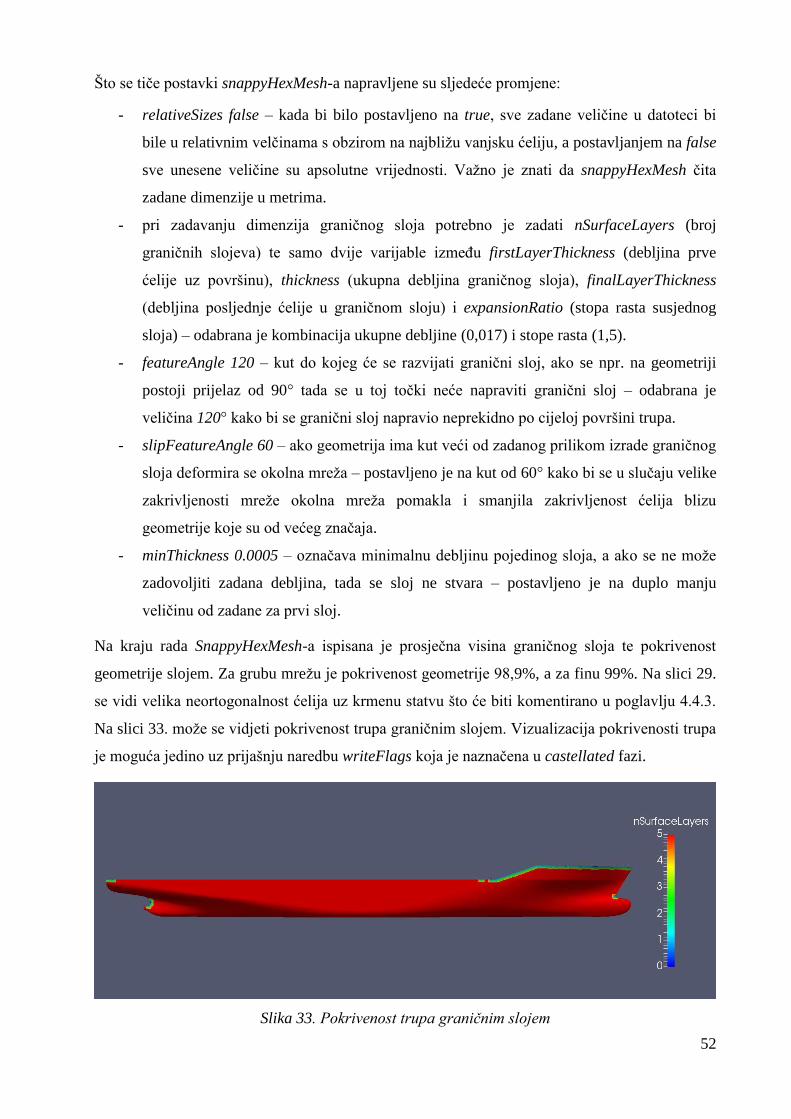
52
Što se tiče postavki snappyHexMesh-a napravljene su sljedeće promjene:
- relativeSizes false – kada bi bilo postavljeno na true, sve zadane veličine u datoteci bi
bile u relativnim velčinama s obzirom na najbliţu vanjsku ćeliju, a postavljanjem na false
sve unesene veličine su apsolutne vrijednosti. Vaţno je znati da snappyHexMesh čita
zadane dimenzije u metrima.
- pri zadavanju dimenzija graničnog sloja potrebno je zadati nSurfaceLayers (broj
graničnih slojeva) te samo dvije varijable izmeĎu firstLayerThickness (debljina prve
ćelije uz površinu), thickness (ukupna debljina graničnog sloja), finalLayerThickness
(debljina posljednje ćelije u graničnom sloju) i expansionRatio (stopa rasta susjednog
sloja) – odabrana je kombinacija ukupne debljine (0,017) i stope rasta (1,5).
- featureAngle 120 – kut do kojeg će se razvijati granični sloj, ako se npr. na geometriji
postoji prijelaz od 90° tada se u toj točki neće napraviti granični sloj – odabrana je
veličina 120° kako bi se granični sloj napravio neprekidno po cijeloj površini trupa.
- slipFeatureAngle 60 – ako geometrija ima kut veći od zadanog prilikom izrade graničnog
sloja deformira se okolna mreţa – postavljeno je na kut od 60° kako bi se u slučaju velike
zakrivljenosti mreţe okolna mreţa pomakla i smanjila zakrivljenost ćelija blizu
geometrije koje su od većeg značaja.
- minThickness 0.0005 – označava minimalnu debljinu pojedinog sloja, a ako se ne moţe
zadovoljiti zadana debljina, tada se sloj ne stvara – postavljeno je na duplo manju
veličinu od zadane za prvi sloj.
Na kraju rada SnappyHexMesh-a ispisana je prosječna visina graničnog sloja te pokrivenost
geometrije slojem. Za grubu mreţu je pokrivenost geometrije 98,9%, a za finu 99%. Na slici 29.
se vidi velika neortogonalnost ćelija uz krmenu statvu što će biti komentirano u poglavlju 4.4.3.
Na slici 33. moţe se vidjeti pokrivenost trupa graničnim slojem. Vizualizacija pokrivenosti trupa
je moguća jedino uz prijašnju naredbu writeFlags koja je naznačena u castellated fazi.
Slika 33. Pokrivenost trupa graničnim slojem
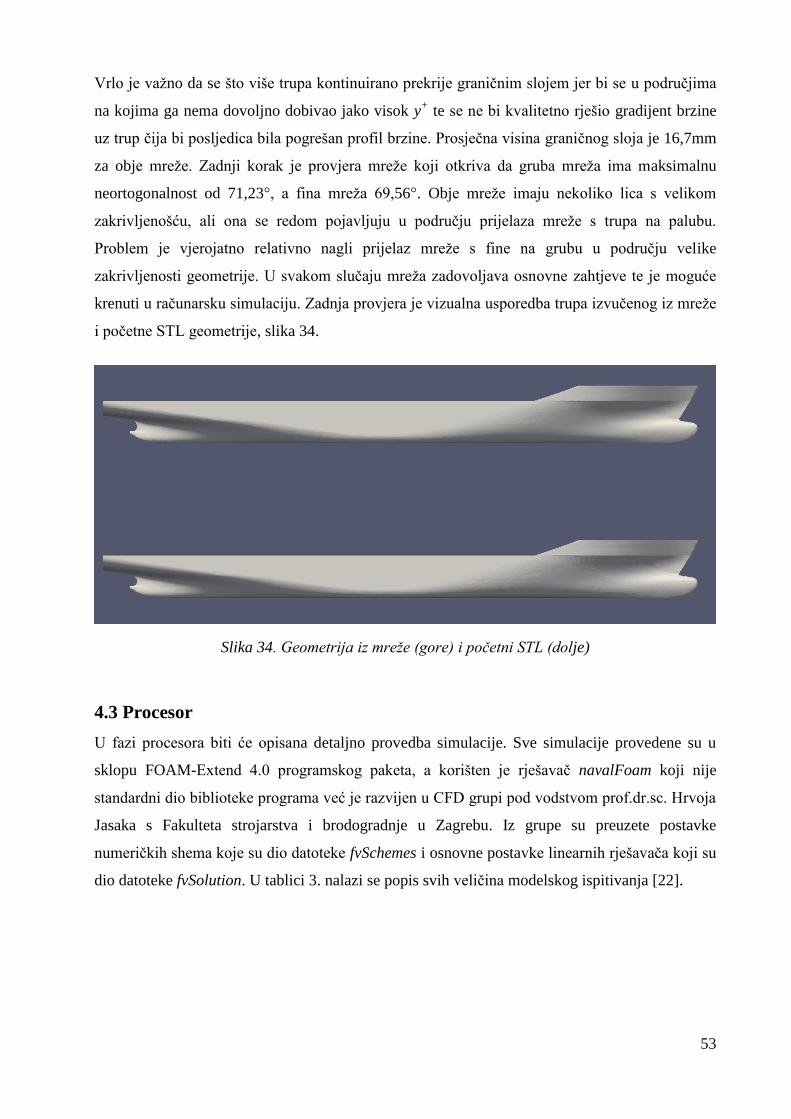
53
Vrlo je vaţno da se što više trupa kontinuirano prekrije graničnim slojem jer bi se u područjima
na kojima ga nema dovoljno dobivao jako visok y+ te se ne bi kvalitetno rješio gradijent brzine
uz trup čija bi posljedica bila pogrešan profil brzine. Prosječna visina graničnog sloja je 16,7mm
za obje mreţe. Zadnji korak je provjera mreţe koji otkriva da gruba mreţa ima maksimalnu
neortogonalnost od 71,23°, a fina mreţa 69,56°. Obje mreţe imaju nekoliko lica s velikom
zakrivljenošću, ali ona se redom pojavljuju u području prijelaza mreţe s trupa na palubu.
Problem je vjerojatno relativno nagli prijelaz mreţe s fine na grubu u području velike
zakrivljenosti geometrije. U svakom slučaju mreţa zadovoljava osnovne zahtjeve te je moguće
krenuti u računarsku simulaciju. Zadnja provjera je vizualna usporedba trupa izvučenog iz mreţe
i početne STL geometrije, slika 34.
Slika 34. Geometrija iz mreže (gore) i početni STL (dolje)
4.3 Procesor
U fazi procesora biti će opisana detaljno provedba simulacije. Sve simulacije provedene su u
sklopu FOAM-Extend 4.0 programskog paketa, a korišten je rješavač navalFoam koji nije
standardni dio biblioteke programa već je razvijen u CFD grupi pod vodstvom prof.dr.sc. Hrvoja
Jasaka s Fakulteta strojarstva i brodogradnje u Zagrebu. Iz grupe su preuzete postavke
numeričkih shema koje su dio datoteke fvSchemes i osnovne postavke linearnih rješavača koji su
dio datoteke fvSolution. U tablici 3. nalazi se popis svih veličina modelskog ispitivanja [22].
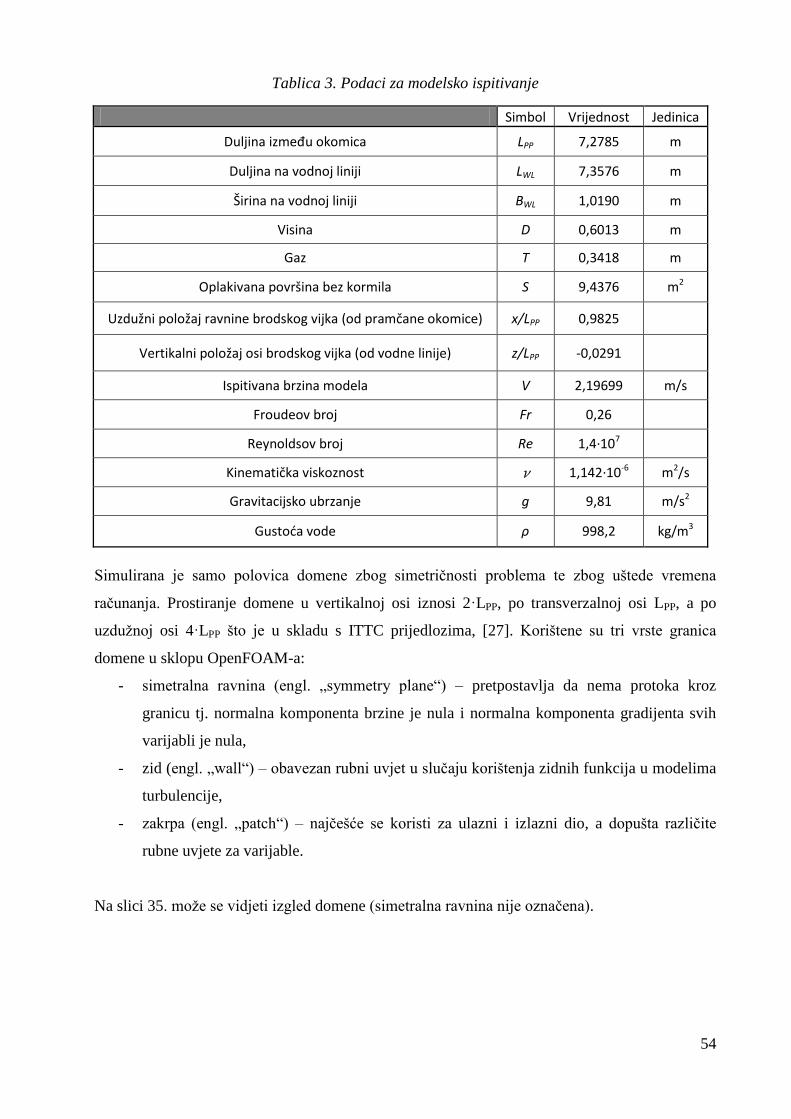
54
Tablica 3. Podaci za modelsko ispitivanje
Simbol Vrijednost Jedinica
Duljina između okomica LPP 7,2785 m
Duljina na vodnoj liniji LWL 7,3576 m
Širina na vodnoj liniji BWL 1,0190 m
Visina D 0,6013 m
Gaz T 0,3418 m
Oplakivana površina bez kormila S 9,4376 m2
Uzdužni položaj ravnine brodskog vijka (od pramčane okomice) x/LPP 0,9825
Vertikalni položaj osi brodskog vijka (od vodne linije) z/LPP -0,0291
Ispitivana brzina modela V 2,19699 m/s
Froudeov broj Fr 0,26
Reynoldsov broj Re 1,4·107
Kinematička viskoznost 1,142·10-6 m2/s
Gravitacijsko ubrzanje g 9,81 m/s2
Gustoda vode ρ 998,2 kg/m3
Simulirana je samo polovica domene zbog simetričnosti problema te zbog uštede vremena
računanja. Prostiranje domene u vertikalnoj osi iznosi 2·LPP, po transverzalnoj osi LPP, a po
uzduţnoj osi 4·LPP što je u skladu s ITTC prijedlozima, [27]. Korištene su tri vrste granica
domene u sklopu OpenFOAM-a:
- simetralna ravnina (engl. „symmetry plane“) – pretpostavlja da nema protoka kroz
granicu tj. normalna komponenta brzine je nula i normalna komponenta gradijenta svih
varijabli je nula,
- zid (engl. „wall“) – obavezan rubni uvjet u slučaju korištenja zidnih funkcija u modelima
turbulencije,
- zakrpa (engl. „patch“) – najčešće se koristi za ulazni i izlazni dio, a dopušta različite
rubne uvjete za varijable.
Na slici 35. moţe se vidjeti izgled domene (simetralna ravnina nije označena).

55
Slika 35. Granice domene
U tablici 4. prikazani su rubni uvjeti varijabli korištenih u simulaciji uz napomenu da se u slučaju
simetralne ravnine kao granice u OpenFOAM-u za sve varijable zadaje rubni uvjet istog naziva.
Rubni uvjeti predstavljeni u tablici 4. se uvelike razlikuju od standardnih uvjeta za slične
simulacije iz razloga što je brzina fluida generirana iz constant/waveProperties datoteke koja
ima svoju biblioteku valova (korišten model je noWaves koji učitava samo vektor brzine za zrak
i vodu). U istoj datoteci su upisane duljine relaksacijskih zona te područje gaza broda tj. prijelaz
s vode na zrak. Dodatna objašnjenja nalaze se na sljedećoj stranici.
Tablica 4. Rubni uvjeti
Brzina (u) Dinamički Tlak (p d )Indikatorska
funkcija (α )
Turbulentna kinetička
energija (k )Specifična disipacija (ω )
UlazBrzina
(waveProperties)Nulti gradijent α (waveProperties) Ulazna vrijednost 6,51·10
-3 Ulazna vrijednost
570,225
IzlazBrzina
(waveProperties)Nulti gradijent α (waveProperties) Nulti gradijent Nulti gradijent
DnoBrzina
(waveProperties)Nulti gradijent
Ulaz/Izlaz (ulazna
vrijednost 1, izlazna 1)Nulti gradijent Nulti gradijent
AtmosferaUlazna/Izlazna brzina
s obzirom na tlakKonstantan tlak
Ulaz/Izlaz (ulazna
vrijednost 0, izlazna 0)
Ulaz/Izlaz (ulazna vrijednost
6,51·10-3, izlazna
vrijednost6,51·10-3)
Ulaz/Izlaz (ulazna vrijednost
570,225, izlazna vrijednost
570,225)
Udaljeno poljeBrzina
(waveProperties)Nulti gradijent Nulti gradijent Nulti gradijent Nulti gradijent
Simetralna
ravninaSimetralna ravnina Simetralna ravnina Simetralna ravnina Simetralna ravnina Simetralna ravnina
Trup / Paluba (0 0 0) Nulti gradijent Nulti gradijent Zidne funkcije Zidne funkcije
56
Brzina
Rubni uvjet za brzinu za ulaz, izlaz, dno i udaljeno polje su preuzeti iz waveProperties datoteke.
U datoteci je definiran vektor brzine „(2,19699 0 0)“ odvojeno za zrak i vodu, a pomoću
relaksacijskih zona čije su duljine definirane za svaku granicu domene osigurava se
nemogućnost refleksije površinskih valova od granica. Rubni uvjet na trupu „(0 0 0)“ označava
da je brzina na stranicama trupa jednaka nuli u svim smjerovima. Specifičan rubni uvjet za
ovakvu vrstu simulacije je „Ulazna/Izlazna“ vrijednost brzina s obzirom na tlak. U suštini je
jednaka stvar kao rubni uvjet „Ulazna/Izlazna“ vrijednost brzine (nulti gradijent ako brzina gleda
prema izlazu domene, a stalna vrijednost ako gleda prema unutra) samo što korisnik ne odreĎuje
stalnu vrijednosti već se ona postavlja na brzinu jednaku normalnoj komponenti brzine u prvoj
ćeliji do granice. Ovakav rubni uvjet omogućava ulaz i izlaz zraka te očuvanje volumena u
cjelokupnoj domeni, a posebno je koristan pri simulaciji broda na valovima.
Dinamički tlak
Dinamički tlak u svim granicama je definiran kao nulti gradijent, osim na atmosferi gdje je
definiran konstantan statički tlak. Ovaj rubni uvjet propisuje konstantnu vrijednost tlaka ukoliko
fluid izlazi kroz granicu, a ako ulazi tada se računa tlak po formuli:
. ( 119 )
S time da je zadan kao nula te se koristi kao referentni tlak u cijeloj domeni. Ovaj rubni uvjet
uvijek ide zajedno s pripadajućim rubnim uvjetom za brzinu.
Indikatorska funkcija
Indikatorska funkcija je takoĎer propisana u waveProperties datoteci s zadanim gazom na način
da u kontrolnim volumenima ispod slobodne površine na ulazu i izlazu poprima vrijednost 1, a
poviše slobodne površine vrijednost 0, dok u jednoj ćeliji u vertikalnom smjeru poprimi
vrijednost izmeĎu 0 i 1. Iz tog razloga je vrlo vaţno kvalitetno usitniti mreţu po Z osi.
Varijable za turublenciju
Varijable za turbulenciju uz trup koriste zidne funkcije i pripadajuće konstante za
model koje su definirane u poglavlju 2.5.1. Na ulazu se standarno definira konstantna ulazna
vrijednost za turbulentnu kinetičku energiju i specifičnu disipaciju dok se na atmosferi propisuje
„Ulazna/Izlazna“ vrijednost zbog usklaĎivanja s rubnim uvjetima za tlak i brzinu.
57
Definiranjem svih veličina (tablica 3.) i rubnih uvjeta (tablica 4.), prije pokretanja simulacije,
potrebno je još provjeriti datoteku system. Kao što je već ranije rečeno, datoteka se sastoji od
četiri tekstualne datoteke: fvSchemes, fvSolution, decomposePar, controlDict. Korištene
numeričke sheme već su ranije opisane u poglavlju 3., ali zbog jednostavnosti biti će ovdje
ponovno ispisane redom kako idu u datoteci:
- diskretizacija vremena – Euler – prvi red točnosti,
- diskretizacija gradijenata – metoda najmanjih kvadrata s ograničenjima na gradijentima
(cellLimited) – ograničenja na gradijentima ne dopuštaju da eksptrapolirano rješenje bude
lokalni ekstrem što je vrlo korisno prilikom problema slobodne površine, ali gubi drugi
red točnosti metode najmanjih kvadrata te unosi odreĎenu količinu numeričke difuzije u
rješenje,
- diskretizacija konvektivne brzine – Gaussov teorem s linearnom uzvodnom shemom
interpolacije (implicitno uzvodna shema, a eksplicitna korekcija s gradijentom brzine),
- diskretizacija konvektivnog i kompresijskog člana indikatorske funkcije – opisano u
poglavlju 3.3.4,
- diskretizacija varijabli za turbulenciju – Gaussov teorem s uzvodnom shemom,
- diskretizacija difuznih članova – Gaussov teorem s linearnom interpolacijom gdje je
ograničen omjer eksplicitne neortogonalne korekcije u odnosu na implicitan dio
jednadţbe.
Što se tiče postavki linearnih rješavača i tolerancija ostataka oni su sljedeći:
- jednaţba količine gibanja (111) – korištena je metoda BiCGStab, a radi se o linearnom
rješavaču za nesimetrične matrice (matrica momente jednadţbe je nesimetrična zbog
konvektivnog člana). Korištena je relativna tolerancija ostatka (omjer početnog i krajnjeg
ostatka) od 10-3
, dok je za posljednje rješenje u iteraciji cijelog vremenskog koraka
(Ufinal) namješten apsolutni ostatak od 10-8
.
- dinamički tlak (112) – korištena je metoda konjugiranih gradijenta (čije osnove su
ukratko opisane u poglavlju 3.4.1) kojom se rješavaju simetrične matrice. Ostaci su isti
onima za brzinu.
- indikatorska funkcija (113) – rješava se takoĎer metodom BiCGStab jer se takoĎer radi o
nesimetričnoj matrici, a korištena je relativna tolerancija ostatka (omjer početnog i
krajnjeg ostatka) od 10-3
.
- varijable za turbulenciju (37), (38) – metoda BiCGStab, a korištena je relativna
tolerancija ostatka (omjer početnog i krajnjeg ostatka) od 10-4
.
Vaţno je još samo spomenuti da su relaksacijski faktori korišteni samo za turbulenciju jer u
slučaju nestacionarne simulacije nije fizikalno miješati rezultate različitih vremenskih koraka.
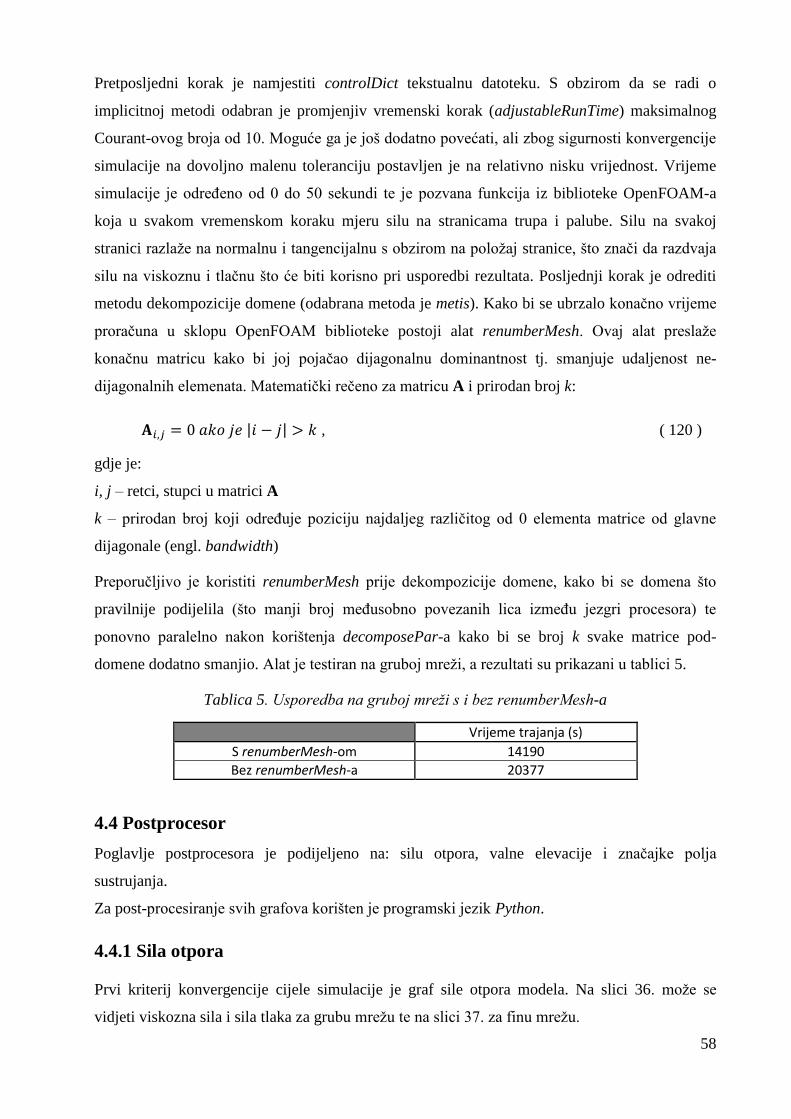
58
Pretposljedni korak je namjestiti controlDict tekstualnu datoteku. S obzirom da se radi o
implicitnoj metodi odabran je promjenjiv vremenski korak (adjustableRunTime) maksimalnog
Courant-ovog broja od 10. Moguće ga je još dodatno povećati, ali zbog sigurnosti konvergencije
simulacije na dovoljno malenu toleranciju postavljen je na relativno nisku vrijednost. Vrijeme
simulacije je odreĎeno od 0 do 50 sekundi te je pozvana funkcija iz biblioteke OpenFOAM-a
koja u svakom vremenskom koraku mjeru silu na stranicama trupa i palube. Silu na svakoj
stranici razlaţe na normalnu i tangencijalnu s obzirom na poloţaj stranice, što znači da razdvaja
silu na viskoznu i tlačnu što će biti korisno pri usporedbi rezultata. Posljednji korak je odrediti
metodu dekompozicije domene (odabrana metoda je metis). Kako bi se ubrzalo konačno vrijeme
proračuna u sklopu OpenFOAM biblioteke postoji alat renumberMesh. Ovaj alat preslaţe
konačnu matricu kako bi joj pojačao dijagonalnu dominantnost tj. smanjuje udaljenost ne-
dijagonalnih elemenata. Matematički rečeno za matricu A i prirodan broj k:
| | , ( 120 )
gdje je:
i, j – retci, stupci u matrici A
k – prirodan broj koji odreĎuje poziciju najdaljeg različitog od 0 elementa matrice od glavne
dijagonale (engl. bandwidth)
Preporučljivo je koristiti renumberMesh prije dekompozicije domene, kako bi se domena što
pravilnije podijelila (što manji broj meĎusobno povezanih lica izmeĎu jezgri procesora) te
ponovno paralelno nakon korištenja decomposePar-a kako bi se broj k svake matrice pod-
domene dodatno smanjio. Alat je testiran na gruboj mreţi, a rezultati su prikazani u tablici 5.
Tablica 5. Usporedba na gruboj mreži s i bez renumberMesh-a
Vrijeme trajanja (s)
S renumberMesh-om 14190
Bez renumberMesh-a 20377
4.4 Postprocesor
Poglavlje postprocesora je podijeljeno na: silu otpora, valne elevacije i značajke polja
sustrujanja.
Za post-procesiranje svih grafova korišten je programski jezik Python.
4.4.1 Sila otpora
Prvi kriterij konvergencije cijele simulacije je graf sile otpora modela. Na slici 36. moţe se
vidjeti viskozna sila i sila tlaka za grubu mreţu te na slici 37. za finu mreţu.
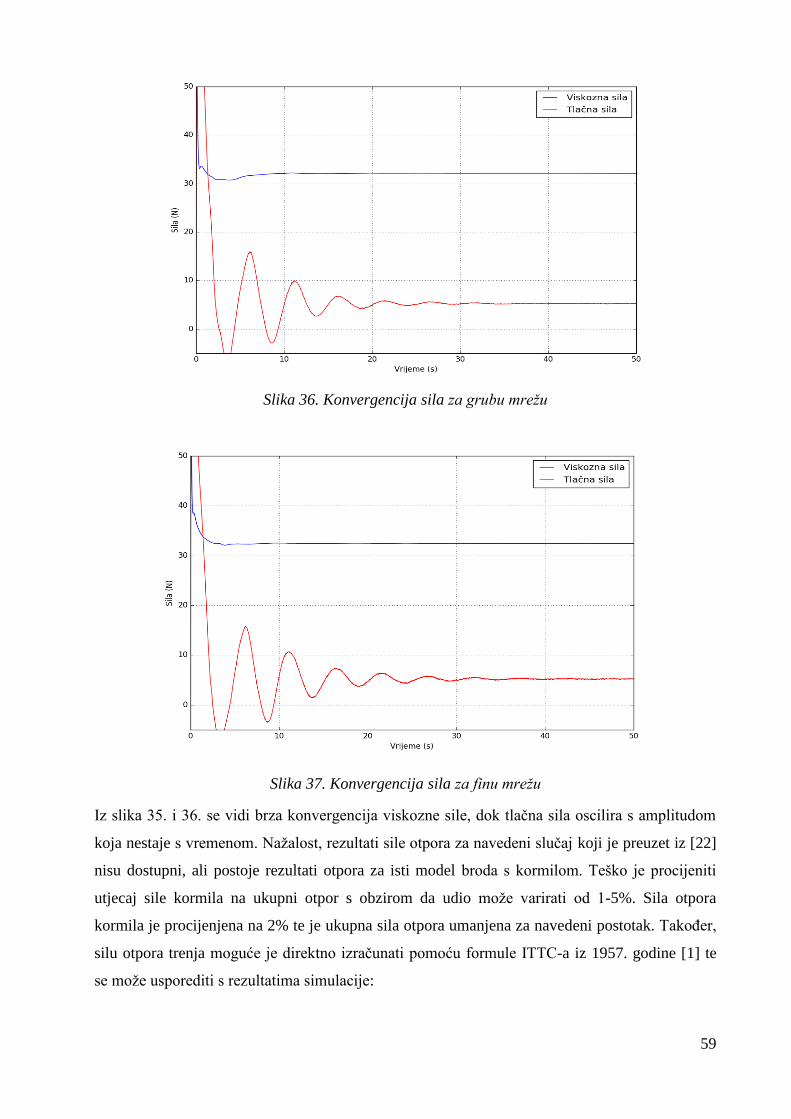
59
Slika 36. Konvergencija sila za grubu mrežu
Slika 37. Konvergencija sila za finu mrežu
Iz slika 35. i 36. se vidi brza konvergencija viskozne sile, dok tlačna sila oscilira s amplitudom
koja nestaje s vremenom. Naţalost, rezultati sile otpora za navedeni slučaj koji je preuzet iz [22]
nisu dostupni, ali postoje rezultati otpora za isti model broda s kormilom. Teško je procijeniti
utjecaj sile kormila na ukupni otpor s obzirom da udio moţe varirati od 1-5%. Sila otpora
kormila je procijenjena na 2% te je ukupna sila otpora umanjena za navedeni postotak. TakoĎer,
silu otpora trenja moguće je direktno izračunati pomoću formule ITTC-a iz 1957. godine [1] te
se moţe usporediti s rezultatima simulacije:
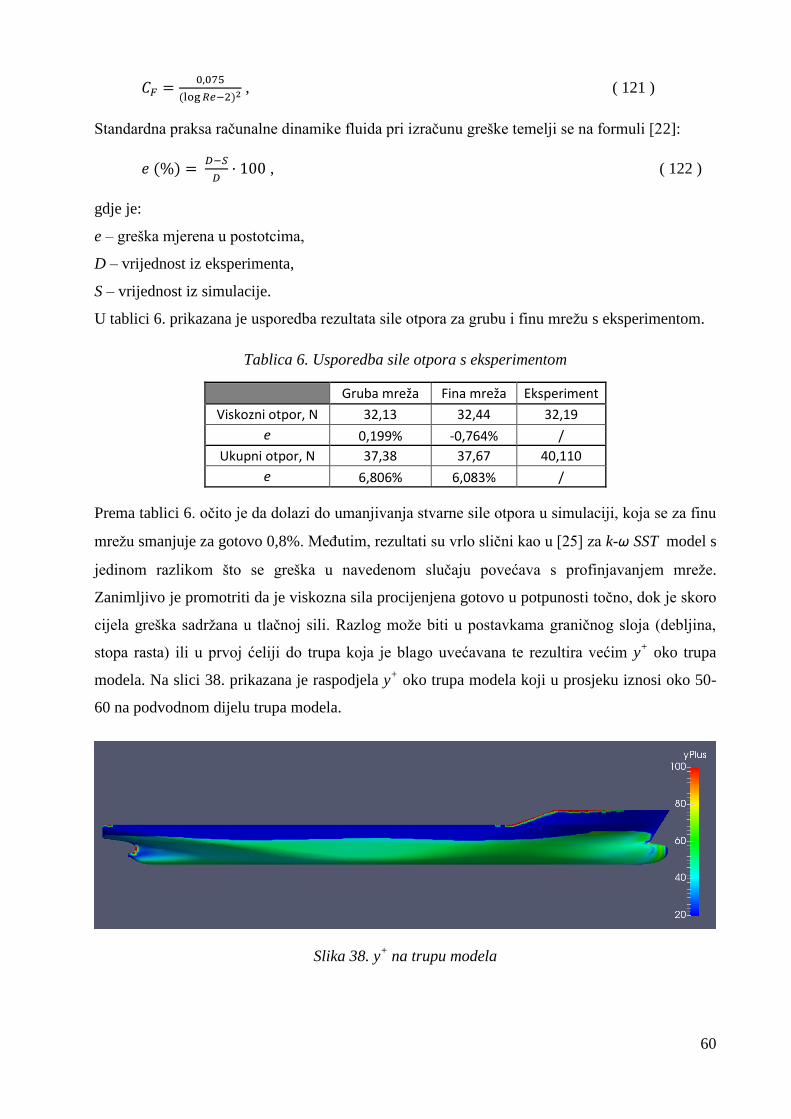
60
, ( 121 )
Standardna praksa računalne dinamike fluida pri izračunu greške temelji se na formuli [22]:
, ( 122 )
gdje je:
e – greška mjerena u postotcima,
D – vrijednost iz eksperimenta,
S – vrijednost iz simulacije.
U tablici 6. prikazana je usporedba rezultata sile otpora za grubu i finu mreţu s eksperimentom.
Tablica 6. Usporedba sile otpora s eksperimentom
Gruba mreža Fina mreža Eksperiment
Viskozni otpor, N 32,13 32,44 32,19
e 0,199% -0,764% /
Ukupni otpor, N 37,38 37,67 40,110
e 6,806% 6,083% /
Prema tablici 6. očito je da dolazi do umanjivanja stvarne sile otpora u simulaciji, koja se za finu
mreţu smanjuje za gotovo 0,8%. MeĎutim, rezultati su vrlo slični kao u [25] za k-ω SST model s
jedinom razlikom što se greška u navedenom slučaju povećava s profinjavanjem mreţe.
Zanimljivo je promotriti da je viskozna sila procijenjena gotovo u potpunosti točno, dok je skoro
cijela greška sadrţana u tlačnoj sili. Razlog moţe biti u postavkama graničnog sloja (debljina,
stopa rasta) ili u prvoj ćeliji do trupa koja je blago uvećavana te rezultira većim y+ oko trupa
modela. Na slici 38. prikazana je raspodjela y+ oko trupa modela koji u prosjeku iznosi oko 50-
60 na podvodnom dijelu trupa modela.
Slika 38. y+ na trupu modela
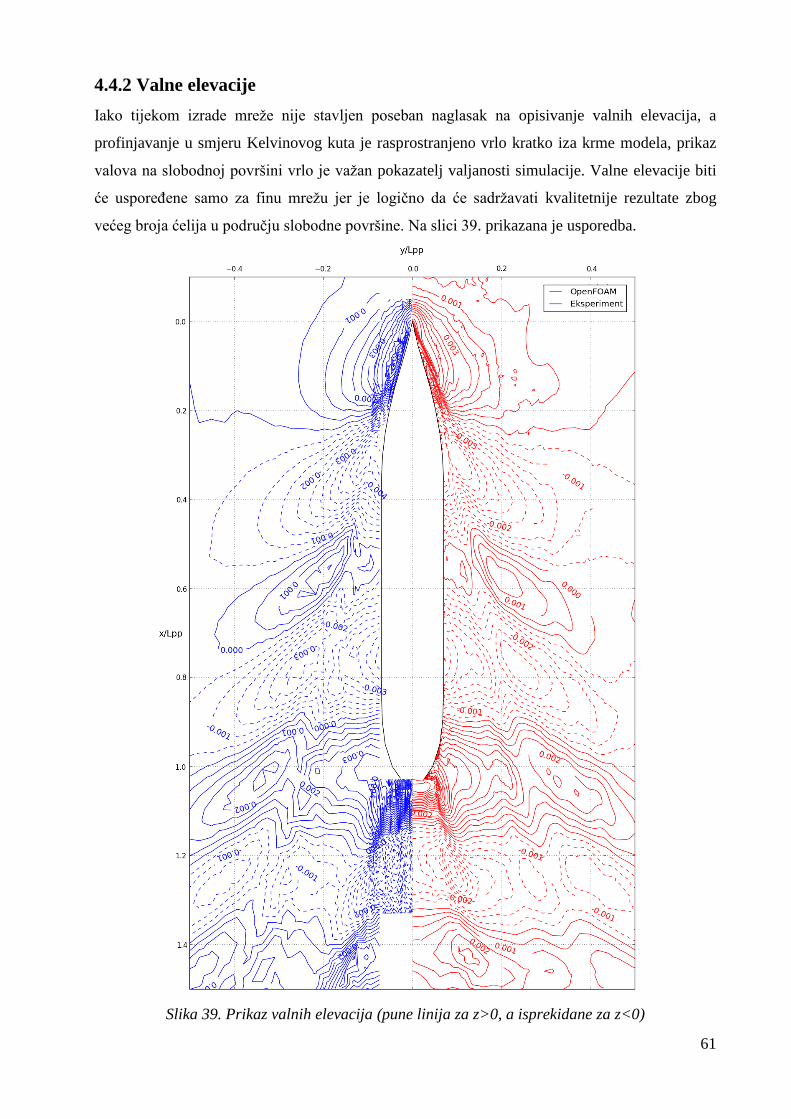
61
4.4.2 Valne elevacije
Iako tijekom izrade mreţe nije stavljen poseban naglasak na opisivanje valnih elevacija, a
profinjavanje u smjeru Kelvinovog kuta je rasprostranjeno vrlo kratko iza krme modela, prikaz
valova na slobodnoj površini vrlo je vaţan pokazatelj valjanosti simulacije. Valne elevacije biti
će usporeĎene samo za finu mreţu jer je logično da će sadrţavati kvalitetnije rezultate zbog
većeg broja ćelija u području slobodne površine. Na slici 39. prikazana je usporedba.
Slika 39. Prikaz valnih elevacija (pune linija za z>0, a isprekidane za z<0)
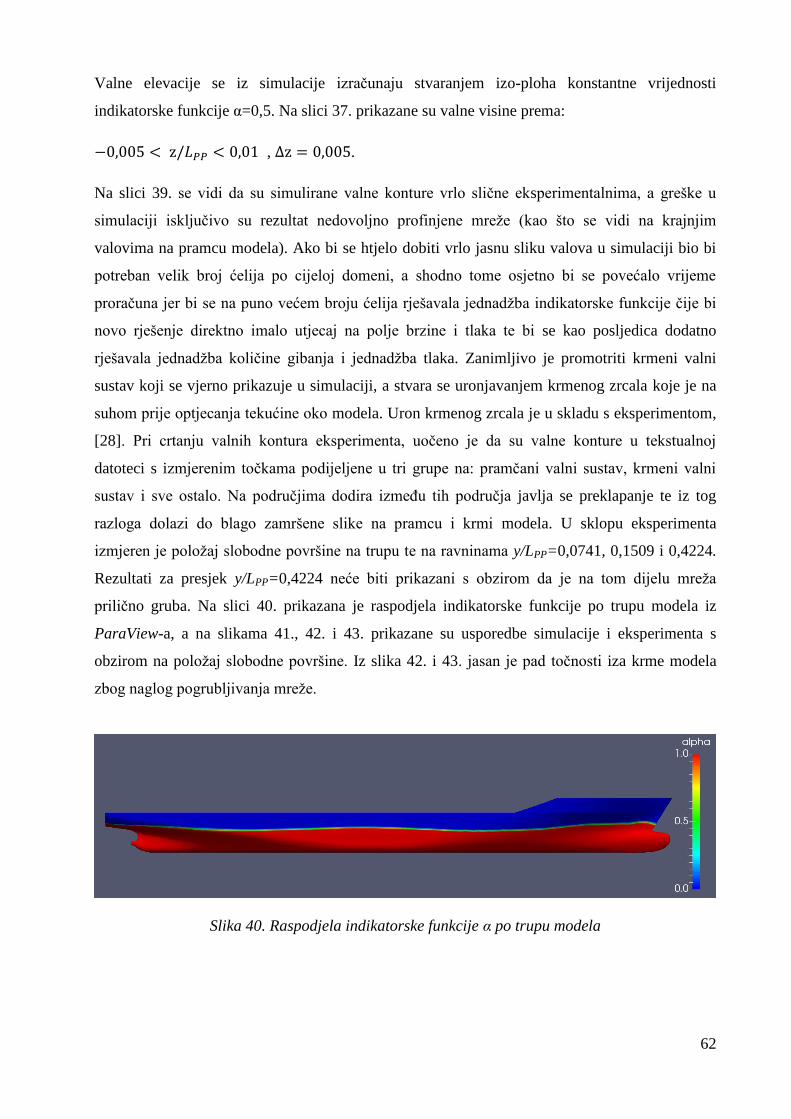
62
Valne elevacije se iz simulacije izračunaju stvaranjem izo-ploha konstantne vrijednosti
indikatorske funkcije α=0,5. Na slici 37. prikazane su valne visine prema:
, .
Na slici 39. se vidi da su simulirane valne konture vrlo slične eksperimentalnima, a greške u
simulaciji isključivo su rezultat nedovoljno profinjene mreţe (kao što se vidi na krajnjim
valovima na pramcu modela). Ako bi se htjelo dobiti vrlo jasnu sliku valova u simulaciji bio bi
potreban velik broj ćelija po cijeloj domeni, a shodno tome osjetno bi se povećalo vrijeme
proračuna jer bi se na puno većem broju ćelija rješavala jednadţba indikatorske funkcije čije bi
novo rješenje direktno imalo utjecaj na polje brzine i tlaka te bi se kao posljedica dodatno
rješavala jednadţba količine gibanja i jednadţba tlaka. Zanimljivo je promotriti krmeni valni
sustav koji se vjerno prikazuje u simulaciji, a stvara se uronjavanjem krmenog zrcala koje je na
suhom prije optjecanja tekućine oko modela. Uron krmenog zrcala je u skladu s eksperimentom,
[28]. Pri crtanju valnih kontura eksperimenta, uočeno je da su valne konture u tekstualnoj
datoteci s izmjerenim točkama podijeljene u tri grupe na: pramčani valni sustav, krmeni valni
sustav i sve ostalo. Na područjima dodira izmeĎu tih područja javlja se preklapanje te iz tog
razloga dolazi do blago zamršene slike na pramcu i krmi modela. U sklopu eksperimenta
izmjeren je poloţaj slobodne površine na trupu te na ravninama y/LPP=0,0741, 0,1509 i 0,4224.
Rezultati za presjek y/LPP=0,4224 neće biti prikazani s obzirom da je na tom dijelu mreţa
prilično gruba. Na slici 40. prikazana je raspodjela indikatorske funkcije po trupu modela iz
ParaView-a, a na slikama 41., 42. i 43. prikazane su usporedbe simulacije i eksperimenta s
obzirom na poloţaj slobodne površine. Iz slika 42. i 43. jasan je pad točnosti iza krme modela
zbog naglog pogrubljivanja mreţe.
Slika 40. Raspodjela indikatorske funkcije α po trupu modela
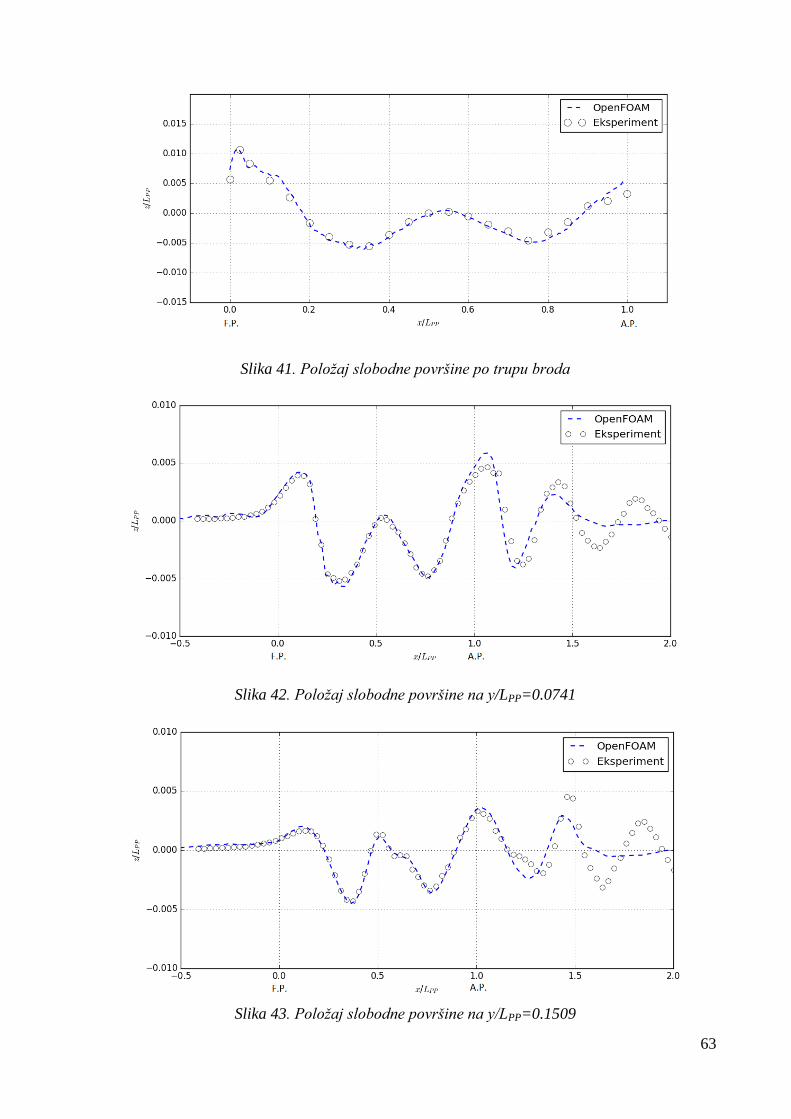
63
Slika 41. Položaj slobodne površine po trupu broda
Slika 42. Položaj slobodne površine na y/LPP=0.0741
Slika 43. Položaj slobodne površine na y/LPP=0.1509
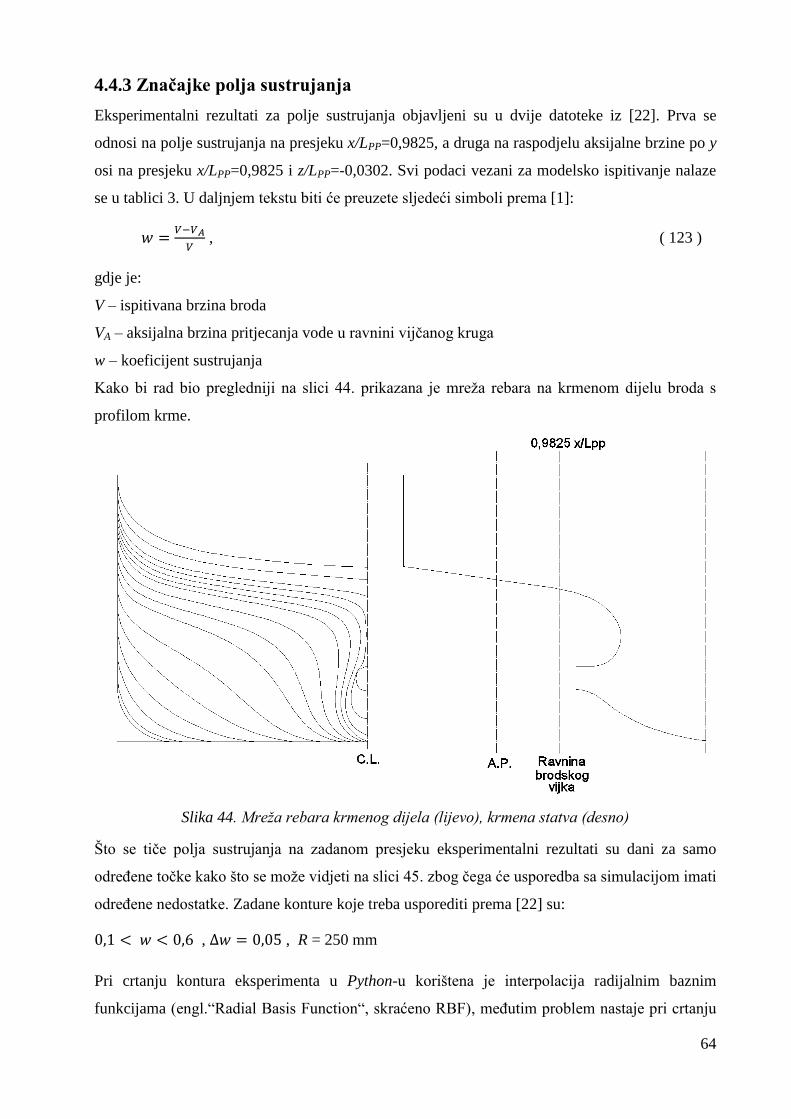
64
4.4.3 Značajke polja sustrujanja
Eksperimentalni rezultati za polje sustrujanja objavljeni su u dvije datoteke iz [22]. Prva se
odnosi na polje sustrujanja na presjeku x/LPP=0,9825, a druga na raspodjelu aksijalne brzine po y
osi na presjeku x/LPP=0,9825 i z/LPP=-0,0302. Svi podaci vezani za modelsko ispitivanje nalaze
se u tablici 3. U daljnjem tekstu biti će preuzete sljedeći simboli prema [1]:
, ( 123 )
gdje je:
V – ispitivana brzina broda
VA – aksijalna brzina pritjecanja vode u ravnini vijčanog kruga
w – koeficijent sustrujanja
Kako bi rad bio pregledniji na slici 44. prikazana je mreţa rebara na krmenom dijelu broda s
profilom krme.
Slika 44. Mreža rebara krmenog dijela (lijevo), krmena statva (desno)
Što se tiče polja sustrujanja na zadanom presjeku eksperimentalni rezultati su dani za samo
odreĎene točke kako što se moţe vidjeti na slici 45. zbog čega će usporedba sa simulacijom imati
odreĎene nedostatke. Zadane konture koje treba usporediti prema [22] su:
, , R = 250 mm
Pri crtanju kontura eksperimenta u Python-u korištena je interpolacija radijalnim baznim
funkcijama (engl.“Radial Basis Function“, skraćeno RBF), meĎutim problem nastaje pri crtanju
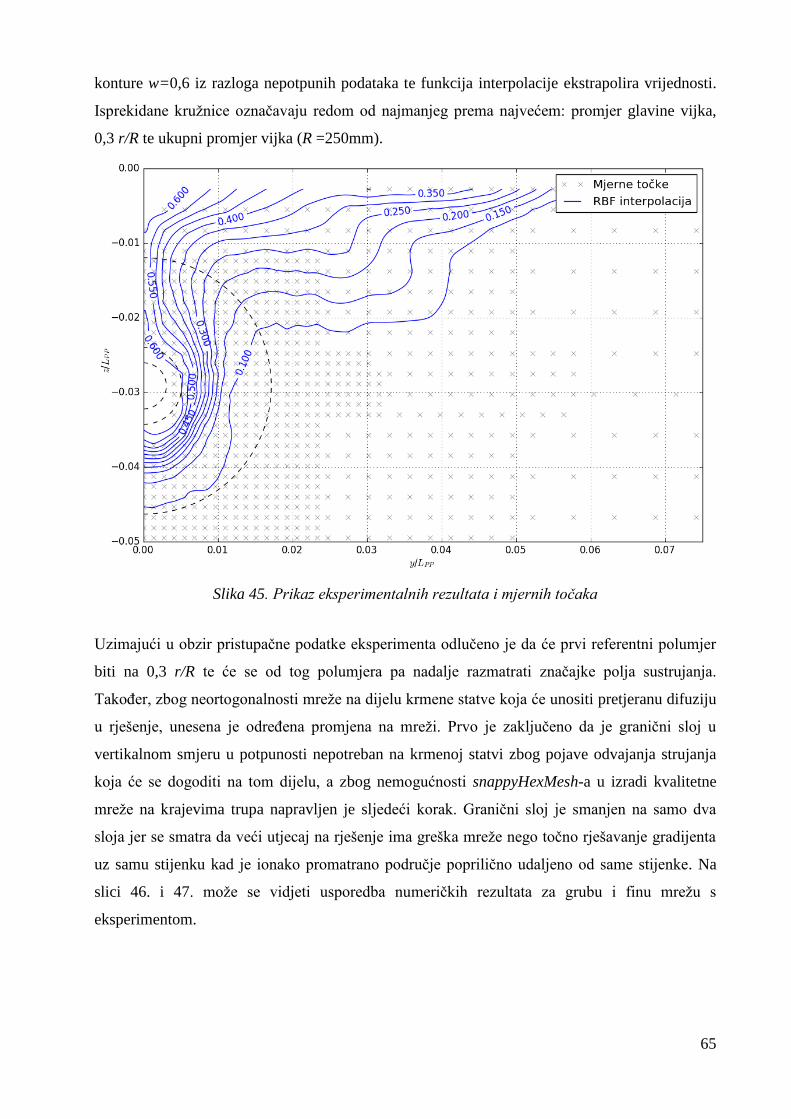
65
konture w=0,6 iz razloga nepotpunih podataka te funkcija interpolacije ekstrapolira vrijednosti.
Isprekidane kruţnice označavaju redom od najmanjeg prema najvećem: promjer glavine vijka,
0,3 r/R te ukupni promjer vijka (R =250mm).
Slika 45. Prikaz eksperimentalnih rezultata i mjernih točaka
Uzimajući u obzir pristupačne podatke eksperimenta odlučeno je da će prvi referentni polumjer
biti na 0,3 r/R te će se od tog polumjera pa nadalje razmatrati značajke polja sustrujanja.
TakoĎer, zbog neortogonalnosti mreţe na dijelu krmene statve koja će unositi pretjeranu difuziju
u rješenje, unesena je odreĎena promjena na mreţi. Prvo je zaključeno da je granični sloj u
vertikalnom smjeru u potpunosti nepotreban na krmenoj statvi zbog pojave odvajanja strujanja
koja će se dogoditi na tom dijelu, a zbog nemogućnosti snappyHexMesh-a u izradi kvalitetne
mreţe na krajevima trupa napravljen je sljedeći korak. Granični sloj je smanjen na samo dva
sloja jer se smatra da veći utjecaj na rješenje ima greška mreţe nego točno rješavanje gradijenta
uz samu stijenku kad je ionako promatrano područje poprilično udaljeno od same stijenke. Na
slici 46. i 47. moţe se vidjeti usporedba numeričkih rezultata za grubu i finu mreţu s
eksperimentom.
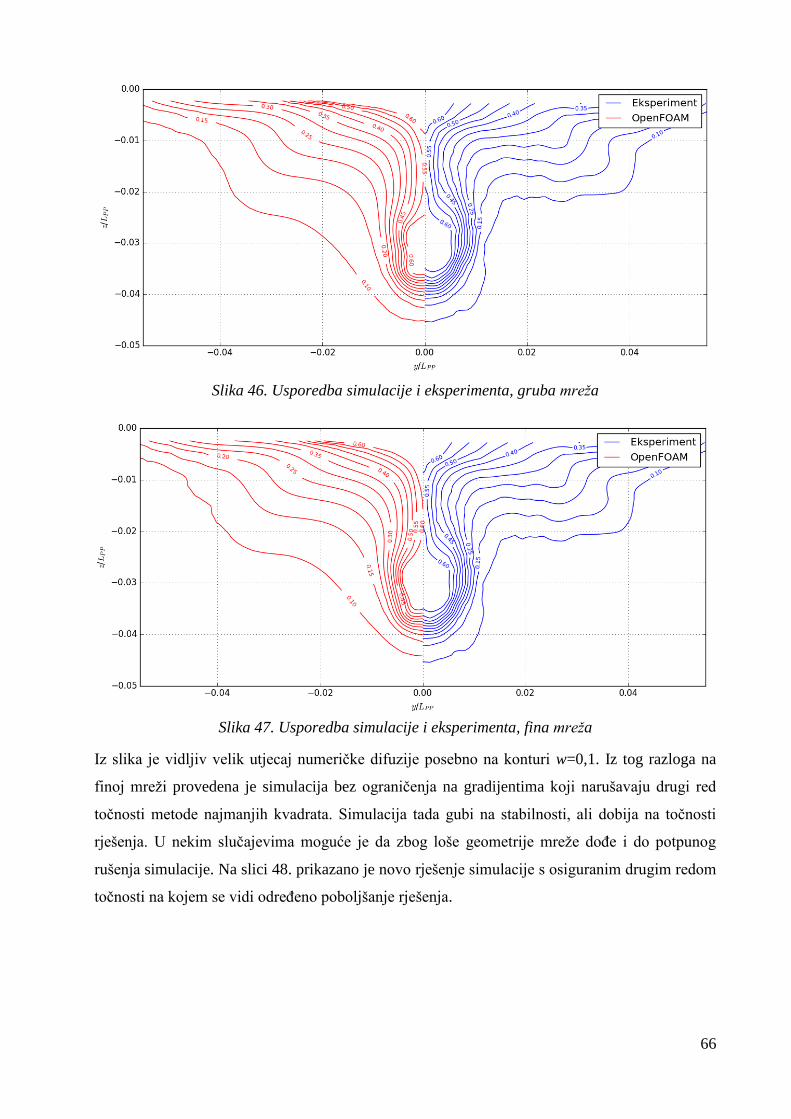
66
Slika 46. Usporedba simulacije i eksperimenta, gruba mreža
Slika 47. Usporedba simulacije i eksperimenta, fina mreža
Iz slika je vidljiv velik utjecaj numeričke difuzije posebno na konturi w=0,1. Iz tog razloga na
finoj mreţi provedena je simulacija bez ograničenja na gradijentima koji narušavaju drugi red
točnosti metode najmanjih kvadrata. Simulacija tada gubi na stabilnosti, ali dobija na točnosti
rješenja. U nekim slučajevima moguće je da zbog loše geometrije mreţe doĎe i do potpunog
rušenja simulacije. Na slici 48. prikazano je novo rješenje simulacije s osiguranim drugim redom
točnosti na kojem se vidi odreĎeno poboljšanje rješenja.
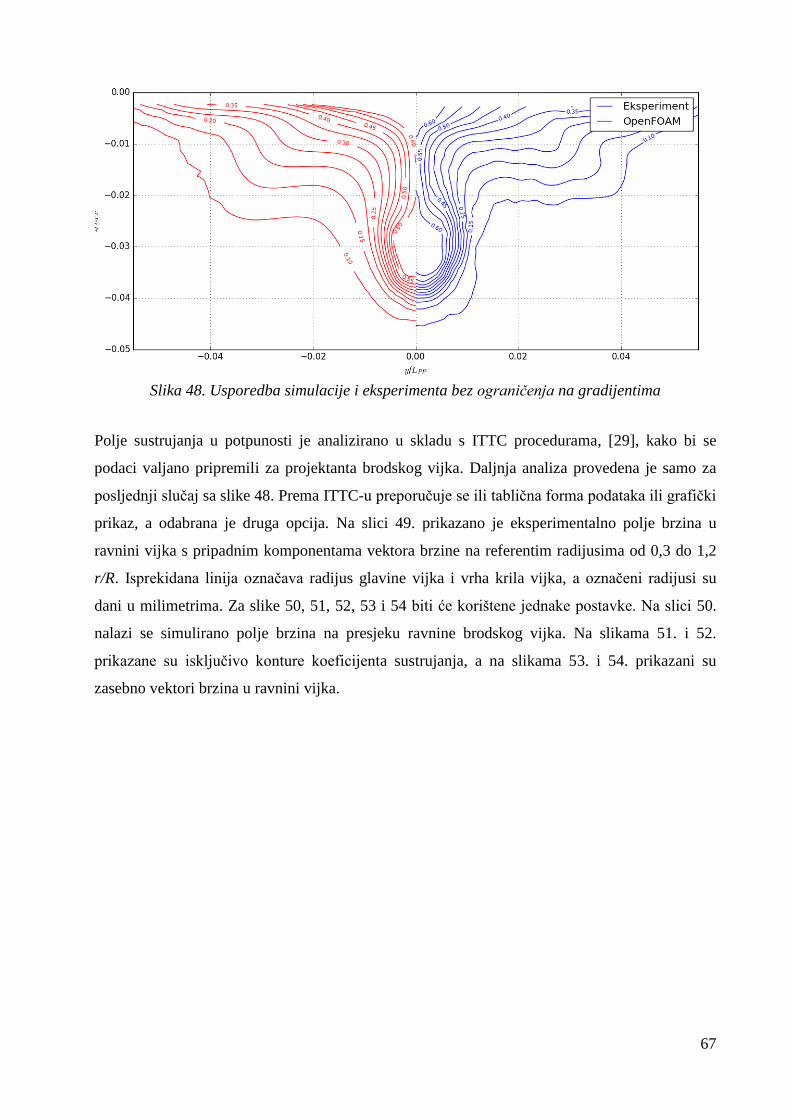
67
Slika 48. Usporedba simulacije i eksperimenta bez ograničenja na gradijentima
Polje sustrujanja u potpunosti je analizirano u skladu s ITTC procedurama, [29], kako bi se
podaci valjano pripremili za projektanta brodskog vijka. Daljnja analiza provedena je samo za
posljednji slučaj sa slike 48. Prema ITTC-u preporučuje se ili tablična forma podataka ili grafički
prikaz, a odabrana je druga opcija. Na slici 49. prikazano je eksperimentalno polje brzina u
ravnini vijka s pripadnim komponentama vektora brzine na referentim radijusima od 0,3 do 1,2
r/R. Isprekidana linija označava radijus glavine vijka i vrha krila vijka, a označeni radijusi su
dani u milimetrima. Za slike 50, 51, 52, 53 i 54 biti će korištene jednake postavke. Na slici 50.
nalazi se simulirano polje brzina na presjeku ravnine brodskog vijka. Na slikama 51. i 52.
prikazane su isključivo konture koeficijenta sustrujanja, a na slikama 53. i 54. prikazani su
zasebno vektori brzina u ravnini vijka.
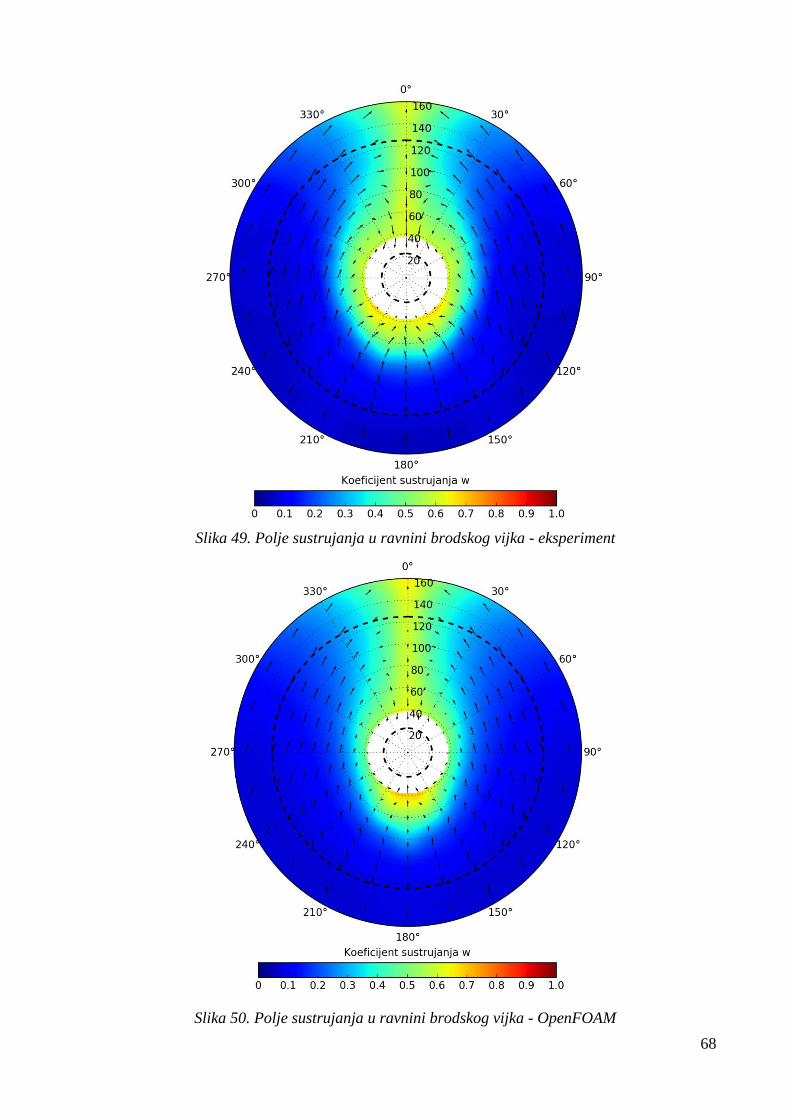
68
Slika 49. Polje sustrujanja u ravnini brodskog vijka - eksperiment
Slika 50. Polje sustrujanja u ravnini brodskog vijka - OpenFOAM
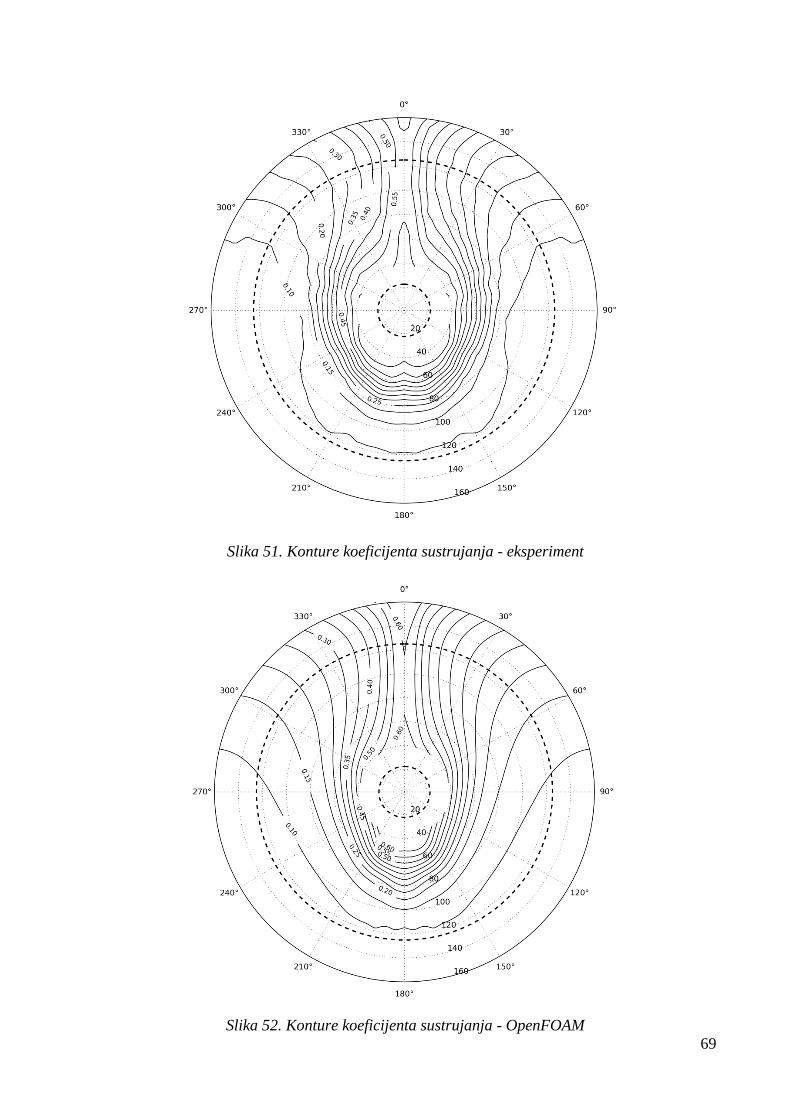
69
Slika 51. Konture koeficijenta sustrujanja - eksperiment
Slika 52. Konture koeficijenta sustrujanja - OpenFOAM

70
Slika 53. Vektori brzina u ravnini brodskog vijka na referentnim radijusima - eksperiment
Slika 54. Vektori brzina u ravnini brodskog vijka na referentnim radijusima - OpenFOAM
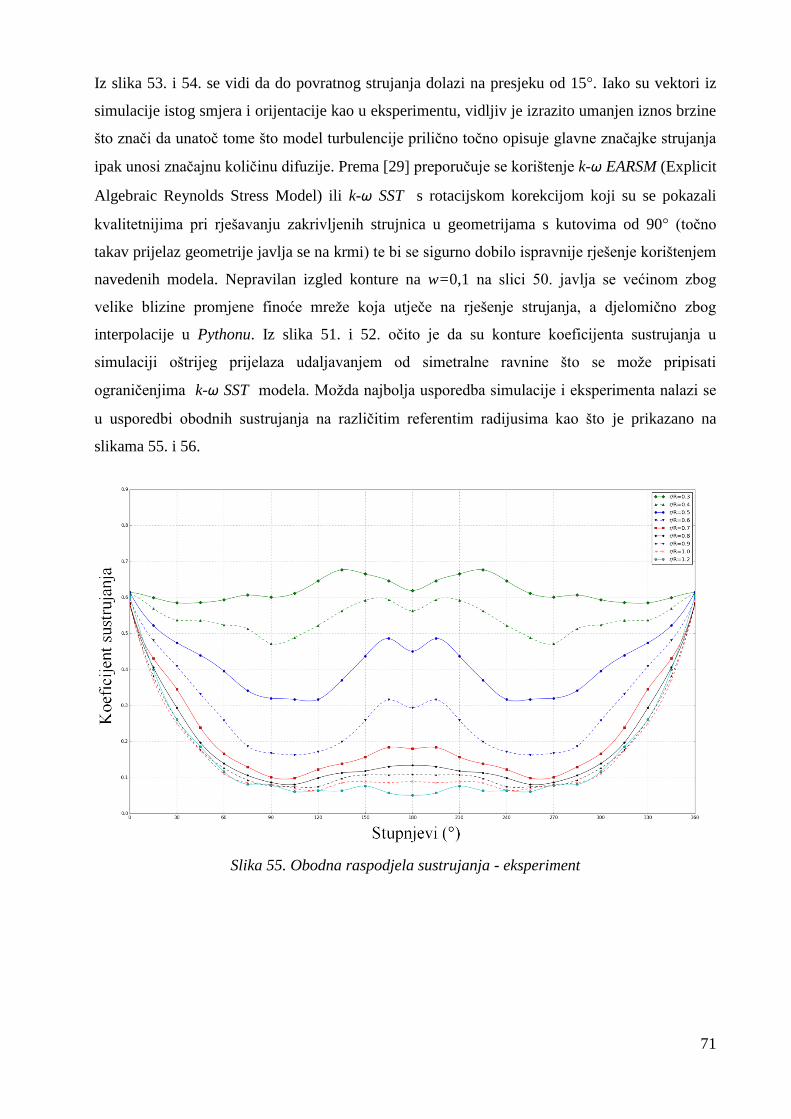
71
Iz slika 53. i 54. se vidi da do povratnog strujanja dolazi na presjeku od 15°. Iako su vektori iz
simulacije istog smjera i orijentacije kao u eksperimentu, vidljiv je izrazito umanjen iznos brzine
što znači da unatoč tome što model turbulencije prilično točno opisuje glavne značajke strujanja
ipak unosi značajnu količinu difuzije. Prema [29] preporučuje se korištenje k-ω EARSM (Explicit
Algebraic Reynolds Stress Model) ili k-ω SST s rotacijskom korekcijom koji su se pokazali
kvalitetnijima pri rješavanju zakrivljenih strujnica u geometrijama s kutovima od 90° (točno
takav prijelaz geometrije javlja se na krmi) te bi se sigurno dobilo ispravnije rješenje korištenjem
navedenih modela. Nepravilan izgled konture na w=0,1 na slici 50. javlja se većinom zbog
velike blizine promjene finoće mreţe koja utječe na rješenje strujanja, a djelomično zbog
interpolacije u Pythonu. Iz slika 51. i 52. očito je da su konture koeficijenta sustrujanja u
simulaciji oštrijeg prijelaza udaljavanjem od simetralne ravnine što se moţe pripisati
ograničenjima k-ω SST modela. Moţda najbolja usporedba simulacije i eksperimenta nalazi se
u usporedbi obodnih sustrujanja na različitim referentim radijusima kao što je prikazano na
slikama 55. i 56.
Slika 55. Obodna raspodjela sustrujanja - eksperiment
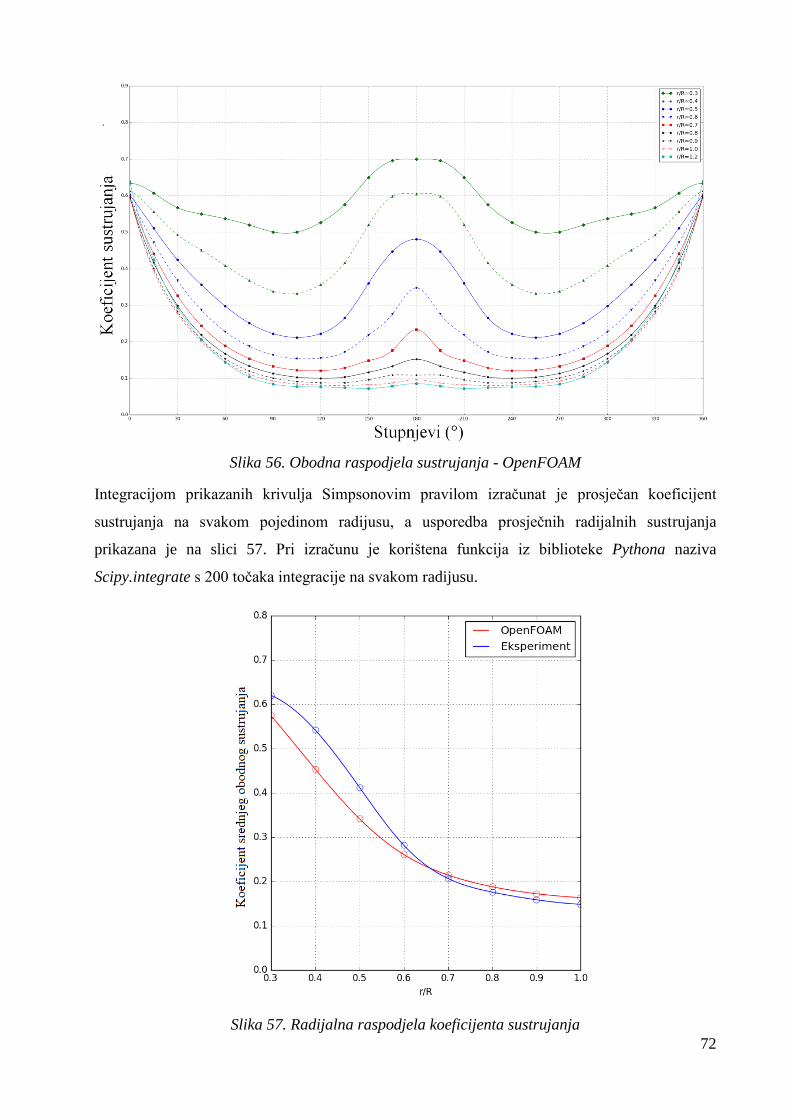
72
Slika 56. Obodna raspodjela sustrujanja - OpenFOAM
Integracijom prikazanih krivulja Simpsonovim pravilom izračunat je prosječan koeficijent
sustrujanja na svakom pojedinom radijusu, a usporedba prosječnih radijalnih sustrujanja
prikazana je na slici 57. Pri izračunu je korištena funkcija iz biblioteke Pythona naziva
Scipy.integrate s 200 točaka integracije na svakom radijusu.
Slika 57. Radijalna raspodjela koeficijenta sustrujanja
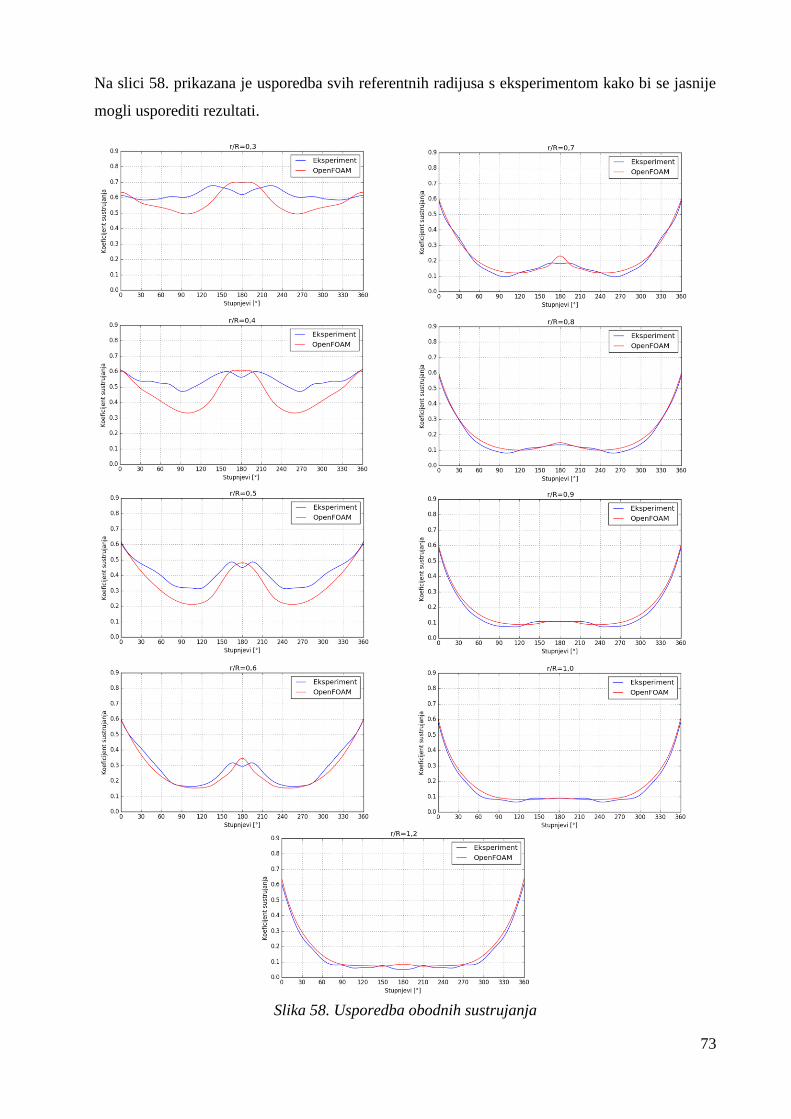
73
Na slici 58. prikazana je usporedba svih referentnih radijusa s eksperimentom kako bi se jasnije
mogli usporediti rezultati.
Slika 58. Usporedba obodnih sustrujanja
74
U ovom trenutku moguće je usporediti vrijednosti srednjeg obodnog sustrujanja simulacije i
eksperimenta te izraziti grešku u postotku na svakom referentnom radijusu.
MeĎutim, nameće se prilično razumljiv problem. Ako se na primjer na radijusu 1 dobije
prosječna vrijednost w=0,60, a na radijusu 2 se dobije w=0,15 očito je da će bilo kakvo
odstupanje u radijusu 2 nositi četiri puta veću grešku pri usporedbi s eksperimentom naspram
usporedbe radijusa 1 s eksperimentom. Iz tog razloga napravljena je sljedeća formula koja uzima
u obzir srednje nominalno sustrujanje na disku mjereno u eksperimentu te na taj način
izračunava teţinsku grešku:
, ( 124 )
gdje je:
– koeficijent srednjeg obodnog sustrujanja u eksperimentu,
– koeficijent srednjeg obodnog sustrujanja u simulaciji,
– srednje nominalno sustrujanje u eksperimentu,
– teţinska greška.
Srednje nominalno sustrujanje na disku izračunato je integracijom aksijalnih brzina po cijeloj
površini vijčanog kruga, a dobivene su vrijednosti prikazani su u tablici 7. Greška je izračunata
prema standardnom postupku (122):
Tablica 7. Usporedba srednjih sustrujanja
wn,eksperiment wn, OpenFOAM et
0,2165 0,1995 -7,85%
Stoga, slijedi tablica 8. u kojoj su prikazane vrijednosti za svaki referentni radijus. Kao što je i
ranije bilo vidljivo na slikama 55., 56., 57. i 58. greška je najveća na radijusima blizu glavine
vijka zbog velikog vrtloţenja fluida i stvaranja izrazito zakrivljenih strujnica koje korišteni
model ne moţe dovoljno kvalitetno obuhvatiti. Greška se umanjuje udaljavanjem od osovine, ali
još uvijek postoji odreĎeno odstupanje u usporedbi s eksperimentom.
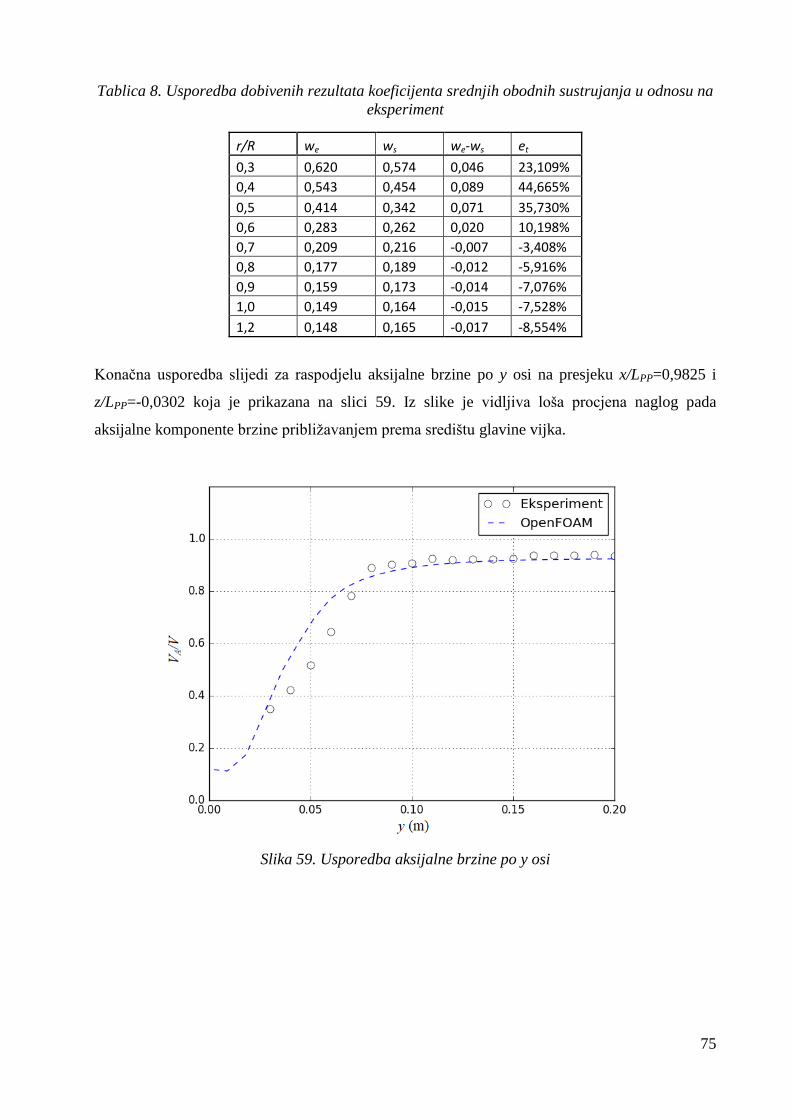
75
Tablica 8. Usporedba dobivenih rezultata koeficijenta srednjih obodnih sustrujanja u odnosu na
eksperiment
r/R we ws we-ws et
0,3 0,620 0,574 0,046 23,109%
0,4 0,543 0,454 0,089 44,665%
0,5 0,414 0,342 0,071 35,730%
0,6 0,283 0,262 0,020 10,198%
0,7 0,209 0,216 -0,007 -3,408%
0,8 0,177 0,189 -0,012 -5,916%
0,9 0,159 0,173 -0,014 -7,076%
1,0 0,149 0,164 -0,015 -7,528%
1,2 0,148 0,165 -0,017 -8,554%
Konačna usporedba slijedi za raspodjelu aksijalne brzine po y osi na presjeku x/LPP=0,9825 i
z/LPP=-0,0302 koja je prikazana na slici 59. Iz slike je vidljiva loša procjena naglog pada
aksijalne komponente brzine pribliţavanjem prema središtu glavine vijka.
Slika 59. Usporedba aksijalne brzine po y osi
76
5. Zaključak
Računalna dinamika fluida (RDF) kroz ovaj rad pokazala se kao jako kvalitetan alat. U suštini,
ona pruţa korisniku vlastiti numerički bazen na običnom PC računalu što je sve zajedno gotovo
neusporedivo s cijenom eksperimenta. S razvijanjem tehnologije računala logično je za očekivati
paralelno razvijanje RDF-a te postizanje kvalitetnih rezultata u puno manje vremena iako je već
sada RDF gotovo nezaobilazan pri projektiranju plovnog objekta.
U radu je u potpunosti analiziran matematički i numerički model u poglavljima 2. i 3. na kojem
se temelji cijela simulacija. Kombinacija VOF metode uz GFM i kompresiju slobodne površine
stvara poprilično pravilnu reprodukciju eksperimentalnih valnih elevacija što se moţe vidjeti u
poglavlju 4.4.2. Unatoč vrlo rijetkoj i gotovo nepostojećoj literaturi razvijen je i predstavljen
novi, gotovo u potpunosti automatski, sustav izrade mreţe s prikladnim usitnjavanjem ćelija u
vertikalnom smjeru u području slobodne površine. Opisane su korištene numeričke sheme i
linearni rješavači s kratkom teorijskom podlogom u poglavlju 3.
Što se tiče samih rezultata, dobiveni su prilično kvalitetni rezultati u vrlo kratkom vremenskom
roku. Simulacija za grubu mreţu trajala je svega nekoliko sati dok je proračun za finu mreţu
trajao skoro 2 dana, što znači da bi vjerojatno, u slučaju optimizacije, bilo isplativije optimirati
formu kroz grublju mreţu te vršiti provjeru na finijoj mreţi, ali valja napomenuti da su proračuni
provedeni na relativno uobičajenom računalu s četiri i7 procesorske jezgre. Ukupna greška
srednjeg sustrujanja na cijelog površini ravnine propelera od 7,85% te procjena otpora s greškom
od 6,01% i prilično točno procjenjene valne visine su pokazale da je OpenFOAM u potpunosti
na razini s komercijalnim RDF kodovima. Jedina mana OpenFOAM-a je vrlo spor i dugotrajan
proces učenja, ali mogućnosti su daleko veće za korisnika kada savlada početne korake.
Što se tiče ocjene valjanosti polja sustrujanja, postoje tri osnovna tipa grešaka koja se mogu
pojaviti, a to su greška mreţe, numeričkih shema i modela turbulencije. Moţda najveća mana
OpenSource RDF-a je omreţivač geometrije ako se usporedi s komercijalnim alatima koji nude
vrlo brzu i efikasnu izradu mreţe bez ikakve posebne pripreme geometrije i sa vrlo malo
uplitanja korisnika u sami proces. Što se tiče druga dva tipa grešaka, ona numeričkih shema se
moţe smatrati definitivno najmanjom u ovom radu (moţda bi drugi red točnosti u vremenu
proizveo drugačije rezultate), dok je greška modela turbulencije već opisana u poglavlju 4.4.3.

77
Za kraj, cijeli proces od početka (izrada mreţe) do kraja (prikaz svih rezultata) vrlo je dugotrajan
i nimalo jednostavan, ali sve stečene vještine i napisane linije koda ostaju korisniku. U današnje
vrijeme neophodno je što veću količinu rada automatizirati, a sa svakom novom provedenom i
analiziranom simulacijom smanjuje se potrebno ukupno vrijeme rada za sljedeću.

78
LITERATURA
[1] Dejhalla, R.: Hidrodinamika plovnih objekata I (Otpor i propulzija), Radna skripta, Rijeka
2011.
[2] Virag, Z., Šavar, M., Dţijan I.: Mehanika fluida II, Predavanja, Zagreb 2015.
[3] Jasak, H.: CFD Course, Lecture Slides, FSB, Zagreb, 2015
[4] Ubbink, O.: Numerical prediction of two fluid systems with sharp interfaces, London 1997.
[5] Hirt, C.W., Nichols, B.D.: Volume of Fluid (VOF) Method for the Dynamics of Free
Boundaries, Journal of Computational Physics, 1981.
[6] Rusche, H.: Computational Fluid Dynamics of Dispersed Two-Phase Flows at High Phase
Fraction, Doctoral Thesis, London 2002.
[7] Perić, M., Ferziger, J.H.: Computational Methods for Fluid Dynamics, 3rd Edition 2002.
[8] Vukčević, V.: Numerical Modelling of Coupled Potential and Viscous Flow for Marine
Applications, FAMENA Doctoral Thesis, Zagreb 2016.
[9] Tuković, Z., Jasak, H.: A moving mesh finite volume interface tracking method for surface
tension dominated interfacial fluid flow, Computational Fluids 55, 2012
[10] Shankar Submaranian, R.: Boundary Conditions in Fluid Mechanics, Clarkson University,
2014
[11] Mente, F.R.: Zonal Two Equation Turbulence Models for Aerodynamic Flows, 24th
Fluid Dynamics Conference, Orlando - Florida, 1993.
[12] Launder, B. E., Spalding, D.B.: The Numerical Computation of Turbulent Flows, Computer
Methods in Applied Mechanics and Engineering, 1974.
[13] Vukčević, V., Jasak, H., Gatin, I.:Numerical Simulation of Wave Loading on Static
Offshore Structures, CFD for Wind and Tidal Offshore Turbines, 2015, 95-105
[14] Virag, Z., Dţijan, I. : Računalna dinamika fluida, Predavanja, Zagreb 2014.
[15] Jasak, H.: Error Analysis and Estimation for the Finite Volume Method with Applications to
Fluid Flows, Imperial College of Science, Technology and Medicine, London, 1996.
[16] Wolf Dynamics, OpenFOAM Workshop, Module 6, 2017
[17] Vukčević, V., Jasak, H., Gatin, I.:Implementation of the Ghost Fluid Method for free
surface flows in polyhedral Finite Volume framework, Computers and Fluids 153 2017. 1-19
79
[18] Jasak, H., Vukčević, V., Gatin, I., Lalović, I.: CFD Validation and Verification of Full
Scale Ship Self Propulsion, International Journal of Naval Architecture and Marine Engineering,
2017
[19] Van Leer, B.: Towards the Ultimate Conservative Difference Scheme, 1977.
[20] Shewchuk, J.R.: An Introduction to the Conjugate Gradient Method Without the Agonizing
Pain, School of Computer Science, Carnegie Mellon University, Pittsburgh, 1994.
[21] OpenFOAM User Guide 4.0, OpenFOAM Foundation, 2016
[22] A Workshop on CFD in Ship Hydrodynamics, Gothenburg 2010, link:
http://www.insean.cnr.it/sites/default/files/gothenburg2010/kcs.html
[23] Jackson, A.: A Comprehensive Tour of snappyHexMesh, 7th OpenFOAM Workshop, 2011
[24] Gisen, D.:Generation of a 3D Mesh Using snappyHexMesh Featuring Anisotropic
Refinement and Near-wall Layers, Karlsruhe, 2014
[25] Jackson, A., Combest D.P.: snappyHexMesh, Theory and Application, 11th OpenFOAM
Workshop, 2015
[26] Enger, S., Perić, M., Perić, R.: Simulation of Flow Around KCS-Hull, Gothenburg, 2010
[27] ITTC: Practical Guidelines for Ship CFD Applications, 2011
[28] Kim, W.J., Van, S.H., Kim, D.H.: Measurement of Flows Around Modern Commercial Ship
Models, Experiments in Fluids 31, 2001, 567-578
[29] ITTC: Practical Guidelines for RANS Calculation of Nominal Wakes, 2014

80
SAŽETAK
Andro Bakica
PROCJENA ZNAČAJKI SUSTRUJANJA MODELA BRODA PRIMJENOM
NUMERIČKE SIMULACIJE VISKOZNOG STRUJANJA
U radu je obraĎena numerička simulacija viskoznog strujanja fluida primjenom računalne
dinamike fluida. Osnovno je objašnjen temeljni matematički model na kojem se temelji
opstrujavanje plovnog objekta uz primjenu k-ω SST modela turbulencije. Objašnjena je metoda
diskretizacije domene konačnim volumenima uz opise osnovnih interpolacijskih shema i rubnih
uvjeta. Ukratko se spominju linearni rješavači dijagonalno dominatnih rijetkih i velikih matrica
te je iznesen opis spregnute SIMPLE i PISO petlje pogodne za velike vremenske korake. Mreţa
konačnih volumena napravljena je u programskom paketu OpenFOAM 4.1 koristeći alat
snappyHexMesh te je ukratko iznesen poboljšan način kontinuiranog anizotropnog profinjavanja
u blizini slobodne površine. Simulacije su izvedene u sklopu programskog paketa FOAM-Extend
4.0 koristeći rješavač navalFoam koji se temelji na Volume of Fluid metodi uz korekcije
GhostFluid metode pri modeliranju diskontinuiteta na slobodnoj površini. Rezultati su
analizirani za otpor broda, valne visine i polje sustrujanja u ravnini brodskog vijka. Analiza
rezultata napravljena je detaljno koristeći OpenSource programski jezik Python. Rezultati su se
pokazali zadovoljavajućima i u skladu s eksperimentima uz odreĎene nedostatke koji se mogu
pripisati korištenom modelu turbulencije ili nedovoljnoj kvaliteti mreţe.

81
SUMMARY
Andro Bakica
EVALUATON OF THE CHARACTERISTICS OF A SHIP MODEL WAKE FIELD
APPLYING A NUMERICAL SIMULATION OF THE VISCOUS FLOW
In this thesis numerical simulation of a viscous fluid was evaluated through
computational fluid dynamics. Basics of the mathematical model, on which flow past around the
ship is based, is presented with use of the k-ω SST turbulence model. Domain discretization with
finite volume method is explained together with basic interpolation schemes and boundary
conditions. Linear solvers of diagonal dominant large and sparse matrices are briefly introduced
with SIMPLE and PISO loop coupling suitable for large time steps. Finite volume mesh was
made in software OpenFOAM 4.1 using snappyHexMesh utility with brief explanation of
improved continous anisotropic mesh refining procedure around the vicinity of the free surface.
Simulatons are performed using FOAM-Extend 4.0 software using Volume of Fluid based solver
navalFoam with Ghost fluid method corrections when modelling the free surface. Results are
analyzed for ship resistance, wave elevations and for the wake field on the ships propeller plane.
Results visualization was performed in detail using OpenSource programming language Python.
Results have shown to be satisfying and in correlation with the experiment with certain
drawbacks that can be adressed to the used turbulence model or mesh inequality.
82
POPIS SLIKA
Slika 1. Naprezanja uslijed sile površinske napetosti [3] ......................................................... 7 Slika 2. Statistički osrednjen profil brzine [2] .............................................................................. 11 Slika 3. Dijagram promjene bezdimenzijske brzine paralelne sa stijenkom i bezdimenzijskom
udaljenošću od stijenke, [2] .......................................................................................................... 15
Slika 4. Funkcija prigušivanja valova w [13] ............................................................................... 16 Slika 5. Kontrolni volmen (poliedar) [3] ...................................................................................... 17 Slika 6. Uzvodna shema [16] ........................................................................................................ 21 Slika 7. Shematski prikaz rješenja konvekcijske 1D jednadžbe [14] ............................................ 21 Slika 8. Shema centralnih razlika [15].......................................................................................... 22
Slika 9. Neortogonalna korekcija [16] .......................................................................................... 23
Slika 10. Numerički rubni uvjet [15] ............................................................................................. 24 Slika 11. Kriterij pronalaženja stranica slobodne površine [17] ................................................. 28
Slika 12. Lokacija slobodne površine između dvije ćelije P i N [17] ............................................ 28
Slika 13. 3D prikaz funkcije [18] ............................................................................................ 32 Slika 14. Proizvoljna simetrična i pozitivno definitna 2x2 matrica A, [20] .................................. 34
Slika 15. Metoda postupnog opadanja gradijenta (desno), konjugirano ortogonalni smjer (lijevo)
[20] ................................................................................................................................................ 34
Slika 16. Konjugirano ortgonalni vektori [20] ............................................................................. 35 Slika 17. Dijagram toka PIMPLE algoritma ................................................................................. 38 Slika 18. Shematski prikaz direktorija simulacije [21] ................................................................. 39
Slika 19. Nacrt rebara ................................................................................................................... 41 Slika 20. Profil krmene i pramčane statve .................................................................................... 41
Slika 21. Model s prikazanim rubovima površina ružičastom bojom ........................................... 42
Slika 22. Okolna mreža ................................................................................................................. 44
Slika 23. Princip profinjavanja mreže [22] .................................................................................. 44 Slika 24. Vizualizacija cellLevel skalarnog polja (poprečni presjek) ........................................... 45
Slika 25. Izgled mreže na kraju castellated faze (poprečni presjek) ............................................. 45 Slika 26. Greška mreže prlikom korištenja VoF modela [24] ....................................................... 46 Slika 27. Anizotropno profinjavanje mreže po vertikalnom presjeku ........................................... 49
Slika 28. Poprečni presjek na gruboj (desno) i finoj (lijevo) - snap faza ..................................... 50 Slika 29. Mreža na pramcu - gruba (desno) i fina (lijevo) ............................................................ 50 Slika 30. Mreža na krmi broda - gruba (desno) i fina (lijevo) ...................................................... 51
Slika 31. Mreža (presjek na slobodnoj površini) - gruba (gore) i fina (dolje) .............................. 51 Slika 32. Poprečni presjek - gruba (desno) i fina (lijevo) ............................................................. 51 Slika 33. Pokrivenost trupa graničnim slojem .............................................................................. 52 Slika 34. Geometrija iz mreže (gore) i početni STL (dolje) .......................................................... 53
Slika 35. Granice domene ............................................................................................................. 55 Slika 36. Konvergencija sila za grubu mrežu ................................................................................ 59 Slika 37. Konvergencija sila za finu mrežu ................................................................................... 59
Slika 38. y+ na trupu modela ......................................................................................................... 60
Slika 39. Prikaz valnih elevacija (pune linija za z>0, a isprekidane za z<0) ............................... 61
Slika 40. Raspodjela indikatorske funkcije α po trupu modela ..................................................... 62 Slika 41. Položaj slobodne površine po trupu broda .................................................................... 63 Slika 42. Položaj slobodne površine na y/LPP=0.0741 ................................................................. 63 Slika 43. Položaj slobodne površine na y/LPP=0.1509 ................................................................. 63 Slika 44. Mreža rebara krmenog dijela (lijevo), krmena statva (desno) ....................................... 64 Slika 45. Prikaz eksperimentalnih rezultata i mjernih točaka ...................................................... 65
83
Slika 46. Usporedba simulacije i eksperimenta, gruba mreža ...................................................... 66 Slika 47. Usporedba simulacije i eksperimenta, fina mreža ......................................................... 66
Slika 48. Usporedba simulacije i eksperimenta bez ograničenja na gradijentima ....................... 67 Slika 49. Polje sustrujanja u ravnini brodskog vijka - eksperiment .............................................. 68 Slika 50. Polje sustrujanja u ravnini brodskog vijka - OpenFOAM ............................................. 68 Slika 51. Konture koeficijenta sustrujanja - eksperiment ............................................................. 69
Slika 52. Konture koeficijenta sustrujanja - OpenFOAM ............................................................. 69 Slika 53. Vektori brzina u ravnini brodskog vijka na referentnim radijusima - eksperiment ....... 70 Slika 54. Vektori brzina u ravnini brodskog vijka na referentnim radijusima - OpenFOAM ....... 70 Slika 55. Obodna raspodjela sustrujanja - eksperiment ............................................................... 71 Slika 56. Obodna raspodjela sustrujanja - OpenFOAM ............................................................... 72
Slika 57. Radijalna raspodjela koeficijenta sustrujanja ............................................................... 72 Slika 58. Usporedba obodnih sustrujanja ..................................................................................... 73 Slika 59. Usporedba aksijalne brzine po y osi .............................................................................. 75
84
POPIS TABLICA
Tablica 1. Dimenzije broda ........................................................................................................... 40
Tablica 2. Usporedba broja kontrolnih volumena za finu i grubu mrežu ..................................... 50 Tablica 3. Podaci za modelsko ispitivanje .................................................................................... 54 Tablica 4. Rubni uvjeti .................................................................................................................. 55 Tablica 5. Usporedba na gruboj mreži s i bez renumberMesh-a .................................................. 58 Tablica 6. Usporedba sile otpora s eksperimentom ...................................................................... 60
Tablica 7. Usporedba srednjih sustrujanja ................................................................................... 74 Tablica 8. Usporedba dobivenih rezultata koeficijenta srednjih obodnih sustrujanja u odnosu na
eksperiment .................................................................................................................................... 75





























