Embed Size (px)
Citation preview

Subsurface Inverse Modeling with Physics BasedMachine Learning
Kailai Xu and Dongzhuo LiJerry M. Harris, Eric Darve
Kailai Xu ([email protected]), et al. Physics Constrained Learning 1 / 35

Outline
1 Inverse Modeling
2 Automatic Differentiation
3 Physics Constrained Learning
4 Applications
5 ADCME: Scientific Machine Learning for Inverse Modeling
Kailai Xu ([email protected]), et al. Physics Constrained Learning 2 / 35

Inverse Modeling
Inverse modeling identifies a certain set of parameters or functionswith which the outputs of the forward analysis matches the desiredresult or measurement.
Many real life engineering problems can be formulated as inversemodeling problems: shape optimization for improving the performanceof structures, optimal control of fluid dynamic systems, etc.t
Physical Properties
Physical Laws
Predictions (Observations)
Inverse Modeling
……
Optimal Control
Predictive Modeling
Discover Physics
Reduced Order Modeling
Kailai Xu ([email protected]), et al. Physics Constrained Learning 3 / 35

Inverse Modeling
Forward Problem
Inverse Problem
Model Parameters
Observations
Physical Laws
Physical LawsEstimation
of Parameters
Prediction of
Observations
Kailai Xu ([email protected]), et al. Physics Constrained Learning 4 / 35
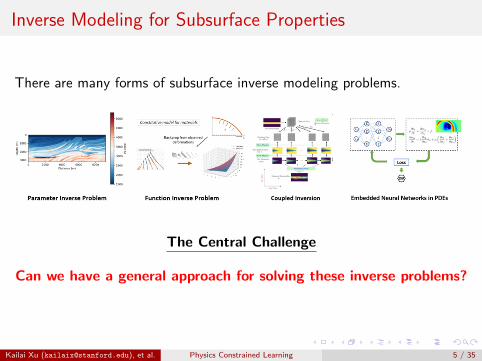
Inverse Modeling for Subsurface Properties
There are many forms of subsurface inverse modeling problems.
The Central Challenge
Can we have a general approach for solving these inverse problems?
Kailai Xu ([email protected]), et al. Physics Constrained Learning 5 / 35

Parameter Inverse Problem
We can formulate inverse modeling as a PDE-constrained optimizationproblem
minθ
Lh(uh) s.t. Fh(θ, uh) = 0
The loss function Lh measures the discrepancy between the predictionuh and the observation uobs, e.g., Lh(uh) = ‖uh − uobs‖2
2.
θ is the model parameter to be calibrated.
The physics constraints Fh(θ, uh) = 0 are described by a system ofpartial differential equations. Solving for uh may require solving linearsystems or applying an iterative algorithm such as theNewton-Raphson method.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 6 / 35

Function Inverse Problem
minf
Lh(uh) s.t. Fh(f , uh) = 0
What if the unknown is a function instead of a set of parameters?
Koopman operator in dynamical systems.Constitutive relations in solid mechanics.Turbulent closure relations in fluid mechanics.Neural-network-based physical properties....
The candidate solution space is infinite dimensional.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 7 / 35

Physics Based Machine Learning
minθ
Lh(uh) s.t. Fh(NNθ, uh) = 0
Deep neural networks exhibit capability of approximating highdimensional and complicated functions.Physics based machine learning: the unknown function isapproximated by a deep neural network, and the physical constraintsare enforced by numerical schemes.Satisfy the physics to the largest extent.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 8 / 35

Gradient Based Optimization
minθ
Lh(uh) s.t. Fh(θ, uh) = 0 (1)
We can now apply a gradient-based optimization method to (1).The key is to calculate the gradient descent direction gk
θk+1 ← θk − αgk
Predicted Data
Observed Data
Loss Function
Calculate Gradients
Update Model Parameters
PDE
Initial and Boundary Conditions
Optimizer
< tol?Calibrated Model
Kailai Xu ([email protected]), et al. Physics Constrained Learning 9 / 35

Outline
1 Inverse Modeling
2 Automatic Differentiation
3 Physics Constrained Learning
4 Applications
5 ADCME: Scientific Machine Learning for Inverse Modeling
Kailai Xu ([email protected]), et al. Physics Constrained Learning 10 / 35
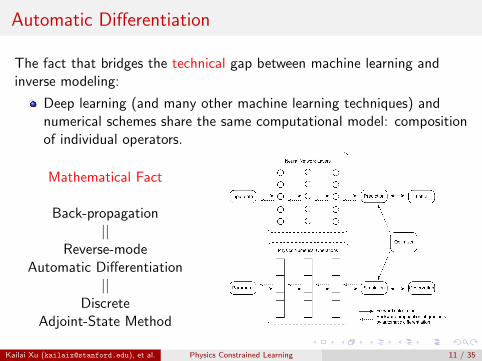
Automatic Differentiation
The fact that bridges the technical gap between machine learning andinverse modeling:
Deep learning (and many other machine learning techniques) andnumerical schemes share the same computational model: compositionof individual operators.
Mathematical Fact
Back-propagation||
Reverse-modeAutomatic Differentiation
||Discrete
Adjoint-State Method
Kailai Xu ([email protected]), et al. Physics Constrained Learning 11 / 35

Forward Mode vs. Reverse Mode
Reverse mode automatic differentiation evaluates gradients in thereverse order of forward computation.Reverse mode automatic differentiation is a more efficient way tocompute gradients of a many-to-one mapping J(α1, α2, α3, α4) ⇒suitable for minimizing a loss (misfit) function.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 12 / 35

Computational Graph for Numerical Schemes
To leverage automatic differentiation for inverse modeling, we need toexpress the numerical schemes in the “AD language”: computationalgraph.
No matter how complicated a numerical scheme is, it can bedecomposed into a collection of operators that are interlinked viastate variable dependencies.
S2
u ϕ
mtΨ2
ϕ(Sn+12 − Sn2) − ∇ ⋅ (m2(Sn+1
2 )K ∇Ψn2) Δt = (qn2 + qn1m2(Sn+12 )m1(Sn+12 ) ) Δt
S2
u ϕ
mtΨ2
S2
u ϕ
mtΨ2
tn tn+1 tn+2
Kailai Xu ([email protected]), et al. Physics Constrained Learning 13 / 35
Outline
1 Inverse Modeling
2 Automatic Differentiation
3 Physics Constrained Learning
4 Applications
5 ADCME: Scientific Machine Learning for Inverse Modeling
Kailai Xu ([email protected]), et al. Physics Constrained Learning 14 / 35
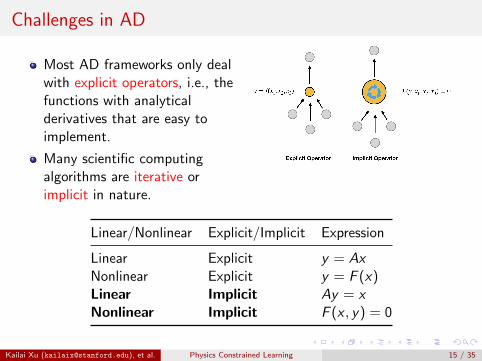
Challenges in AD
Most AD frameworks only dealwith explicit operators, i.e., thefunctions with analyticalderivatives that are easy toimplement.
Many scientific computingalgorithms are iterative orimplicit in nature.
Linear/Nonlinear Explicit/Implicit Expression
Linear Explicit y = AxNonlinear Explicit y = F (x)Linear Implicit Ay = xNonlinear Implicit F (x , y) = 0
Kailai Xu ([email protected]), et al. Physics Constrained Learning 15 / 35

Implicit Operators in Subsurface Modeling
For reasons such as nonlinearity and stability, implicit operators(schemes) are almost everywhere in subsurface modeling...
The ultimate solution: design “differentiable” implicit operators.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 16 / 35
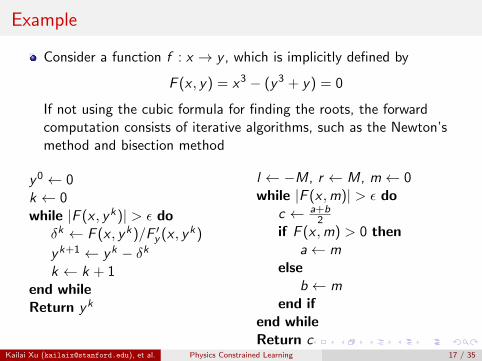
Example
Consider a function f : x → y , which is implicitly defined by
F (x , y) = x3 − (y3 + y) = 0
If not using the cubic formula for finding the roots, the forwardcomputation consists of iterative algorithms, such as the Newton’smethod and bisection method
y0 ← 0k ← 0while |F (x , yk)| > ε do
δk ← F (x , yk)/F ′y (x , yk)
yk+1 ← yk − δkk ← k + 1
end whileReturn yk
l ← −M, r ← M, m← 0while |F (x ,m)| > ε do
c ← a+b2
if F (x ,m) > 0 thena← m
elseb ← m
end ifend whileReturn c
Kailai Xu ([email protected]), et al. Physics Constrained Learning 17 / 35
Example
An efficient way is to apply the implicit function theorem. For ourexample, F (x , y) = x3 − (y3 + y) = 0, treat y as a function of x andtake the derivative on both sides
3x2 − 3y(x)2y ′(x)− 1 = 0⇒ y ′(x) =3x2 − 1
3y(x)2
The above gradient is exact.
Can we apply the same idea to inverse modeling?
Kailai Xu ([email protected]), et al. Physics Constrained Learning 18 / 35
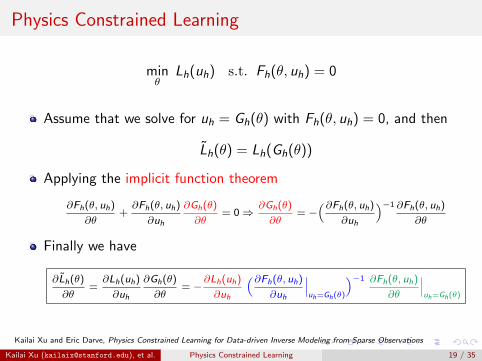
Physics Constrained Learning
minθ
Lh(uh) s.t. Fh(θ, uh) = 0
Assume that we solve for uh = Gh(θ) with Fh(θ, uh) = 0, and then
L̃h(θ) = Lh(Gh(θ))
Applying the implicit function theorem
∂Fh(θ, uh)
∂θ+∂Fh(θ, uh)
∂uh
∂Gh(θ)
∂θ= 0⇒
∂Gh(θ)
∂θ= −
(∂Fh(θ, uh)
∂uh
)−1 ∂Fh(θ, uh)
∂θ
Finally we have
∂L̃h(θ)
∂θ=∂Lh(uh)
∂uh
∂Gh(θ)
∂θ= −
∂Lh(uh)
∂uh
(∂Fh(θ, uh)
∂uh
∣∣∣uh=Gh(θ)
)−1 ∂Fh(θ, uh)
∂θ
∣∣∣uh=Gh(θ)
Kailai Xu and Eric Darve, Physics Constrained Learning for Data-driven Inverse Modeling from Sparse Observations
Kailai Xu ([email protected]), et al. Physics Constrained Learning 19 / 35

Outline
1 Inverse Modeling
2 Automatic Differentiation
3 Physics Constrained Learning
4 Applications
5 ADCME: Scientific Machine Learning for Inverse Modeling
Kailai Xu ([email protected]), et al. Physics Constrained Learning 20 / 35
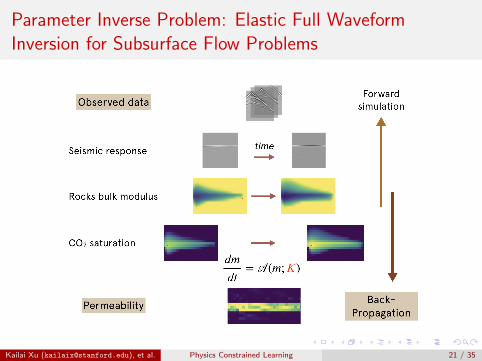
Parameter Inverse Problem: Elastic Full WaveformInversion for Subsurface Flow Problems
Kailai Xu ([email protected]), et al. Physics Constrained Learning 21 / 35

Fully Nonlinear Implicit Schemes
The governing equation is a nonlinear PDE
∂
∂t(φSiρi ) +∇ · (ρivi ) = ρiqi , i = 1, 2
S1 + S2 = 1
vi = −Kkri
µ̃i(∇Pi − gρi∇Z), i = 1, 2
kr1(S1) =kor1S
L11
SL11 + E1S
T12
kr2(S1) =SL2
2
SL22 + E2S
T21
ρ∂vz
∂t=∂σzz
∂z+∂σxz
∂x
ρ∂vx
∂t=∂σxx
∂x+∂σxz
∂z∂σzz
∂t= (λ+ 2µ)
∂vz
∂z+ λ
∂vx
∂x∂σxx
∂t= (λ+ 2µ)
∂vx
∂x+ λ
∂vz
∂z∂σxz
∂t= µ(
∂vz
∂x+∂vx
∂z),
For stability and efficiency, implicit methods are the industrialstandards.
φ(Sn+12 − Sn
2 )−∇ ·(m2(Sn+1
2 )K∇Ψn2
)∆t =
(qn2 + qn1
m2(Sn+12 )
m1(Sn+12 )
)∆t mi (s) =
kri (s)
µ̃i
Kailai Xu ([email protected]), et al. Physics Constrained Learning 22 / 35
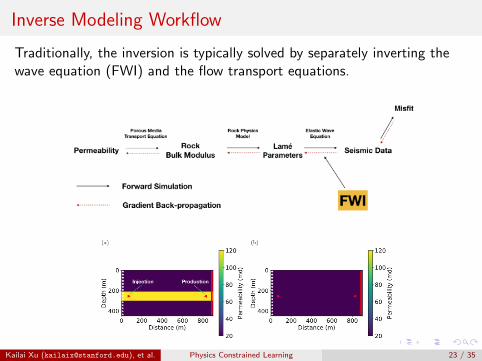
Inverse Modeling Workflow
Traditionally, the inversion is typically solved by separately inverting thewave equation (FWI) and the flow transport equations.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 23 / 35

Coupled Inversion vs. Decoupled Inversion
We found that coupled inversion reduces the artifacts from FWIsignificantly and yields a substantially better results.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 24 / 35

Travel Time vs. Full Waveforms
We also compared using only travel time (left, Eikonal equation) versususing full waveforms (right, FWI) for inversion. We found that fullwaveforms do contain more information for making a better estimation ofthe permeability property.
The Eikonal equation solver was also implemented with physics constrained
learning!
Kailai Xu ([email protected]), et al. Physics Constrained Learning 25 / 35

Check out our package FwiFlow.jl for wave and flow inversion and ourrecently published paper for this work.
High Performance
Solves inverse modelingproblems faster with ourGPU-accelerated FWImodule.
Designed forSubsurface Modeling
Provides many operatorsthat can be reused fordifferent subsurfacemodeling problems.
Easy to Extend
Allows users toimplement and inserttheir own customoperators and solve newproblems.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 26 / 35

Function Inverse Problem: Modeling Viscoelasticity
Multi-physics Interaction of Coupled Geomechanics and Multi-PhaseFlow Equations
divσ(u)− b∇p = 0
1
M
∂p
∂t+ b
∂εv (u)
∂t−∇ ·
(k
Bf µ∇p)
= f (x , t)
σ = σ(ε, ε̇)
Approximate the constitutive relation by a neural network
σn+1 = NN θ(σn, εn) + Hεn+1
Traction-free∂u∂n
= 0
No-flow∂p∂n
= 0
Fixed Pressurep = 0
No-flow∂p∂n
= 0No-flow∂p∂n
= 0 Injection Production
x
y
Finite Element Finite Volume Cell
He1 He2
He3 He4
e
Sensors
Kailai Xu ([email protected]), et al. Physics Constrained Learning 27 / 35

Neural Networks: Inverse Modeling of Viscoelasticity
We propose the following form for modeling viscosity (assume thetime step size is fixed):
σn+1 − σn = NN θ(σn, εn) + H(εn+1 − εn)
H is a free optimizable symmetric positive definite matrix (SPD).Hence the numerical stiffness matrix is SPD.
Implicit linear equation
σn+1 − Hεn+1 = −Hεn +NN θ(σn, εn) + σn := NN ∗θ(σn, εn)
Linear system to solve in each time step ⇒ good balance betweennumerical stability and computational cost.
Good performance in our numerical examples.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 28 / 35

Training Strategy and Numerical Stability
Physics constrained learning = improved numerical stability inpredictive modeling.
For simplicity, consider two strategies to train an NN-basedconstitutive relation using direct data {(εno , σno)}n
∆σn = H∆εn +NN θ(σn, εn), H � 0
Training with input-output pairs
minθ
∑n
(σn+1o −
(Hεn+1
o +NN ∗θ(σno , εno)))2
Better stability using training on trajectory = physics constrainedlearning
minθ
∑n
(σn(θ)− σno)2
s.t. I.C. σ1 = σ1o and time integrator ∆σn = H∆εn +NN θ(σn, εn)
Kailai Xu ([email protected]), et al. Physics Constrained Learning 29 / 35
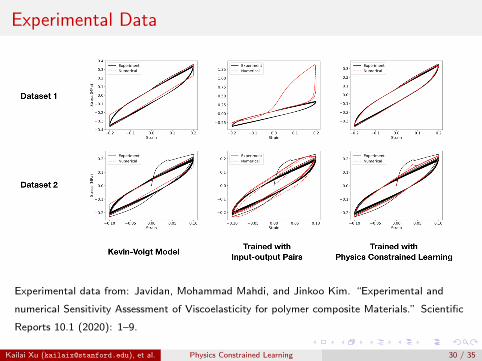
Experimental Data
Experimental data from: Javidan, Mohammad Mahdi, and Jinkoo Kim. “Experimental and
numerical Sensitivity Assessment of Viscoelasticity for polymer composite Materials.” Scientific
Reports 10.1 (2020): 1–9.
Kailai Xu ([email protected]), et al. Physics Constrained Learning 30 / 35

Inverse Modeling of Viscoelasticity
Comparison with space varying linear elasticity approximation
σ = H(x , y)ε
Kailai Xu ([email protected]), et al. Physics Constrained Learning 31 / 35
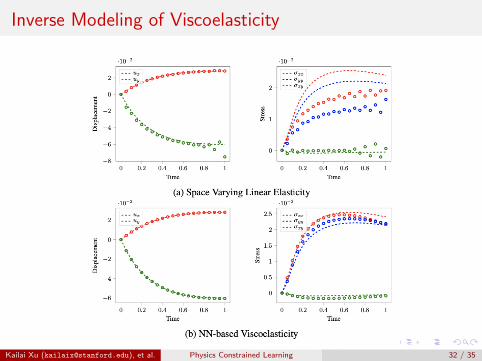
Inverse Modeling of Viscoelasticity
Kailai Xu ([email protected]), et al. Physics Constrained Learning 32 / 35

Outline
1 Inverse Modeling
2 Automatic Differentiation
3 Physics Constrained Learning
4 Applications
5 ADCME: Scientific Machine Learning for Inverse Modeling
Kailai Xu ([email protected]), et al. Physics Constrained Learning 33 / 35

Physical Simulation as a Computational Graph
Kailai Xu ([email protected]), et al. Physics Constrained Learning 34 / 35

A General Approach to Inverse Modeling
Kailai Xu ([email protected]), et al. Physics Constrained Learning 35 / 35





























