Embed Size (px)
Citation preview

Danilin Alexander. Stiffness Optimization of Airframe. Page 1
STIFFNESS OPTIMIZATION OF AIRFRAME
Book 1. Theory
ALEXANDER DANILIN
Professor for Structural Design, Samara State Aerospace University,
Russia

Danilin Alexander. Stiffness Optimization of Airframe. Page 2
© 2009 Danilin Alexander Stiffness Optimization of Airframe. On-line monograph in English.
CONTENT 1. Introduction
1.1. Minimax principles in a mechanics of structures. Historical excursion. 1.2. Optimization and computer support of designing. Methodological aspects.
2. Designing on strength conditions
2.1. Energy of deformations. Structure with uniform strength.
3. Designing with stiffness requirements 3.1. Stiffness requirement for air structures. Problem definitions. 3.2. Limitation on elastic displacement as inequalities.
3.2.1. Designing only on a stiffness condition. 3.2.2. Property of the founded material distribution. 3.2.3. Hyperstatic structures. 3.2.4. Designing algorithm to satisfy many strength and single stiffness requirement. 3.2.5. Designing algorithm to satisfy many strength and stiffness requirements. 3.2.6. Theory Applications.
3.2.6.1. Identification of aeroelastic characteristic (typical) sections. 3.2.6.2. Example - vertical tail design with strength and stiffness constraints.
3.3. Restrictions in the form of equalities on elastic deformations. 3.3.1. Conditions of providing of the given deformations. 3.3.2. Algorithm of designing.
3.4. Dynamic stiffness requirements. 3.4.1. Structure such as beams and frames.
3.4.1.1. Optimality Criterion. 3.4.1.2. Algorithm for designing beams and frames. 3.4.1.3. Test example. Swept wing optimization.
3.4.2. Structure such as plates. 3.4.2.1. Isotropic plates. 3.4.2.2. Designing algorithm for isotropic plates. 3.4.2.3. Orthotropic plates. 3.4.2.4. Optimization of an orientation angle of orthotropy axes. 3.4.2.5. Designing algorithm of orthotropic plates 3.4.2.6. Test example. Delta wing structure optimization
RESUME
REFERENCES

Danilin Alexander. Stiffness Optimization of Airframe. Page 3
Any intellection proceeds from concepts of a middle community and develops from them on two directions: on the one hand it aims to concepts of a more abstractness, embracing the increasing combination of things and by virtue of it enveloping wider and wider area of a reality; on the other hand, it is directed to point of interception of concepts, - to a particular single complex, to individuum, by what we in area of our thinking able to reach only by infinite number of limiting definitions, by association to general concept of "thing" or "something" of uncountable quantity specific, differentiating moment. Otto Weininger [1] As the building of the whole world is perfect and is raised completely by overwise Creator, in the world does not happen anything, in what the sense of any maximum or minimum would not be seen. Leonard Euler [ 2 ]
1. Introduction
1.1. Minimax principles in a mechanics of structures.
Historical excursion.
The history of a mechanics is a history of attempts to explain all phenomena in the world with the help of small number of the universal laws and general principles. The greatest successes which were reached on this way are connected to idea that the phenomena have some extreme properties, that is, in really happening processes some characteristics achieve the maximum or minimum value. This attractive idea has arisen for a long time, practically in first attempts of scientific understanding of the world. Still Aristotel wrote, that the nature in all events goes by an easiest way with the least costs, however in Euler opinion [ 3 ], Aristotel has obtained this idea from his predecessors.
The first clear formulation of a minimax principle with reference to a physical problem was given in a 1662 by French mathematician Pierre Fermat. Investigating the law of a refraction of light on the boundary of two mediums with various optical properties, he has agreed in the basis of the reasoning the postulate of Aristotel and has accepted, that light, being diffracted, will select such path, that the time of its passing was minimum. It is easy to show, that from here is received the correct law of a refraction of light.
The successful application of a minimax principle in optics has raised the question about searches of analogies in a mechanics. In various individual problems were engaged Johann and Jakob Bernoulli, Leibnitz, Newton and other giants of a science. However in the solutions, obtained by them, it was not possible to find common methods of statement and solution of minimax problems.
The first formulation of a variational principle in a mechanics is assigned Pierre-Louis Moreau de Maupertuis, which he has given in a 1774. According to a principle de Maupertuis, in true, really happening motion the product of physical body mass on it speed and the path is minimum. This value of product de Maupertuis, following the Leibnitz, has named as action and has declared a principle of minimal action as the general law of a nature. In that 1774 Euler has published book [ 2 ], in which has

Danilin Alexander. Stiffness Optimization of Airframe. Page 4
given the common solution of an isoperimetrical problem, has inducted the necessary minimum condition of a functional, has formulated the basic lemma of variational calculus and has applied the mathematical apparatus, developed by him, to solving of problems in the theory of elasticity. By the way, the mathematical and physical sense in a principle of minimal action was introduced just by Euler. He has understood, that the expression is suitable for operations offered de Maupertuis only for elementary segments of a path dS, and for whole path it is necessary to sum of all increments of action, so, that
∫ ∫==L
t
t
mvmvD1
0
;dt ds 2 (1.1)
That is, the action accurate within factor coincides with kinetic energy of physical body. Joseph Louis Lagrange (Giuseppe Lodovico Lagrangia) has completed development of a
principle of minimal action in the famous book "Analytical mechanics ". In it Lagrange, on the base of the principle of d'Alembert and idea of virtual displacement, has entered concepts of a generalized coordinate and generalized forces and has reduced the theory of a mechanics to some general equations, from which was possible to get all necessary formulas for the solution of individual problems. These general equations are obtained from a principle of minimal action. However principle was formulated not absolutely precisely, that has induced to further speculations and has resulted Jacobi, Poincare Hamilton, Ostrogradsky to some modifications of this principle. Now main using received modifications of a principle of minimal action the first in form of Hamilton - Ostrogradsky, in which the action represents a residual of kinetic and potential energies
∫ −=1
0
;dt )(t
t
UKD (1.2)
and also in form of Hamilton - Poincare, in which the action is determined on trajectories in a phase space - space of a generalized coordinate and impulses. The initial formulation of a principle of minimal action in form of de Maupertuis - Lagrange now practically does not meet.
There is a natural question: whether is it possible all physical laws to deduce from a condition of a stationarity of some selected action?
The history of a science gives the positive answer on this question. The idea of extremeness of properties of happening processes is confirmed excellent in all areas of a physical reality. All macro and micro-interaction, including interactions of elementary particles, all physical fields are those, that the controlling laws can be obtained from a condition of some actions stationarity. Moreover, the inclining in availability of extreme properties has taken roots so deeply, that in new situations, when the laws of an investigated appearance are unknown, some action is constructed, is wrote the condition it’s stationarity and the unknown equations are injected. Such way obtained many equations of a quantum mechanics, by this way Einstein improved equations of a general theory of a relativity; it is a basic method of problem solving in various disciplines including interdisciplinary problem.
At the same time basically minimal action principle has something, that plunged into amazement many most experienced scientists and gives the basis to see in it the main proof of God Existence. The Poincare, specifically writes [4]: "... In the formulation of minimal action principle there is something unacceptable for reason. To get from one point in other, the material molecule, free from effect of any force, but forced to move on any surface, will move on the geodesic line, that is on the shortest path. This molecule as though knows a point, where it want to result, predicts time, which will take it for reaching this point, following on that or other path, and then selects most approaching path. The formulation represents to us so to tell, it as an entity inanimate and free. It is clear, that it was necessary better to replace this formulation this one less boggled imagination, in which, as the philosophers speak, the final goals will not seem substituting the effecient causes."

Danilin Alexander. Stiffness Optimization of Airframe. Page 5
He is echoed with Hertz [5]: "... A principle of the Hamilton... Not only puts motion, happening in present moment, in dependence on consequences, which can come in future, assuming existence intentions of lifeless nature, but, that it is even worse, it assumes existence in nature of senseless intentions. For the integral, which minimum requires the principle of the Hamilton, has not simple physical value; besides the reduction of mathematical expression to a minimum or equality it’s variation to zero is represented as the unintelligible purpose of nature."
In a mechanics of buildings the minimax principles were applied long before their formulation.
Historically first variational equation was a gold rule of a mechanics - virtual work principle. It description was contained in "Physics" by Aristotel (IV centuries up to AD), the wide application for designing of various lifting mechanisms is given by the Archimedes (287-212 years up to AD). Generally, construction and mechanics of buildings have given a push to many researches of a nature of things, and, especially, development of minimax principles. The necessity of reliable assigning of the sizes of buildings required steep study of features of load-carrying designs and materials. Therefore practical engineers implemented researches and used in the activity the last theoretical results. In the analysis of load-carrying capacity of designs the idea of extremeness of properties takes a leading place.
Galilei (1564 - 1642 years) has developed the mathematical apparatus for problem solving of statics with use virtual work principle. He has done the first formulation and solution of optimum designing problem. He investigates a problem of searching of the shape of a console beam of equal resistance, which cross section is rectangle. Design parameter is high of a beam. The console is loaded by a point force and the own weight is not taken into account. Galilei finds, that the longitudinal outline of the console should have the parabolic shape [6]. Despite of an inaccuracy of the theory of a bending, merit of Galilei is that he at once has connected building mechanics to idea of extremeness of properties and has formulated problem of optimum designing.
During consequent two hundred years there was a development and perfecting of the
mathematical apparatus of variational calculus. In a mechanics all best forces of the scientists were directed on structural analysis of specific designs. By efforts of the Lagrange, Cauchy, Lame, Navier, Maxwell, Mohr is created the mathematical theory of elasticity, which, infortunately, a little that has given to computational practice. About this time clearly writes A.Liav [7]: "History of the mathematical theory of elasticity shows, that it development was not determined only by reasons about usefulness it conclusions for a technical mechanics. Majority of the people, due to which efforts was engendered and was formed the theory of elasticity, were interested more in natural philosophy, than material progress, were aimed more to learn the world, than to make it more convenient. As a result such mentality, the theory, can, in a smaller degree, than it could, promoted material progress. "
The problems of searching of designs with extreme properties in this period removal on the second plan, but oblivion are not subjected. The Lagrange puts a problem of searching of a longitudinal profile of a column of the greatest efficiency. As a measure of efficiency he accepts the relation of a critical load to guadrate of column volume. And though the Lagrange does not receive the satisfactory solution, but he gives a push to researches of the optimum shape of columns (Klausen, Nikolai, Blasius etc.).
Girard investigated beams of equal resistance and shows a capability different realization of theoretically optimum project. Young, continuing researches of Parana, gives the full solution of a problem on the optimal shape of beam of the rectangular cross-section which has been cut out from the specific circular cylinder.

Danilin Alexander. Stiffness Optimization of Airframe. Page 6
At the same time we should mark, that these researches have incidental character and seriously in theory of optimum designing nobody is worked. However extreme principles after activities of the Euler and Lagrange become the basic tool in theory of elasticity and building mechanics.
With using introduced by Robert Hooke (1669) concept of deformations energy the creation of a
general theory of elasticity is completed. By connecting deformations energy with job of forces on virtual displacements and by applying variational principles, Navier, Maxwell, Mohr, Castiliano have proofed series of the foundational theorems which have permitted to build reliable techniques of calculation of stresses in structures of various types: trusses, bars, beams, plates, shells.
The development of engineering and especially of aircraft has required the rational projects and precisiouly stress calculations in complex structures. However exact mathematical solutions in the theory were possible to receive for very few problems and for the elements have a quite certain type strain-stress distribution. Therefore main efforts in the applied elasticity theory were directed on development of approximate methods which in a combination with computers allow to do structural analysis any designs with any degree of a static indeterminacy. The basic tool of the engineer-analyst is now finite element method, which basic equations are deduced from minimizations of virtual energy of deformations. [8, 9].
In parallel with application of minimax principles for creation of methods of stress analysis, the scientists investigated properties of designs with specific extreme properties. The theory of optimum designing takes the beginning from the book Navier [10], which first issuing has published in a 1826 and in which he has formulated two primal problems of the theory of building: "The solid body resists to loading, which aims to bend it or to break. Searching the laws, at which it can take place, it is possible to select two basic problems: 1) having the specific scheme of structure and loading, which are affixed on it, to define, whether will structure be bent or be broken; 2) to find such scheme of structure, at which by minimal volume of structure the greatest resistance would be achieved". Under the proposal I.M.Rabinovitch [11] first from these problems is called primal problem, and second - inverse problem, if the scheme of structure is given and it is required to find distribution of a material among load-carrying elements. The problem, in which in addition it is required to define scheme of structure (sceleton), was called generalized inverse problem.
Systematic study of properties of optimum designs, the attempts to create methods of searching of the optimum projects begin after basic results from Navier. In the article of the Maxwell [12] and in consequent development which was executed by Michell [13], were incorporated by a fundamentals of the theory of optimum designing of trusses with minimum volume in single loading and with limitation on elastic displacements under loading. However in a Michell structures we usually have indefinitely large number of elements, therefore they in very seldom cases can be immediately used for designing of real structure. More than hundred years was required before creation practically suitable algorithms.
Though idea of equal strength in elements intuitively used since the Galilei (1564-1642гг)., only
in 20 century it was possible to receive the theoretical substantiation of methods for searching of equal in strength designs, which are optimal by single loading.
What is it - optimum project, optimum structure? How the optimality correlates with equality in strength, with other properties of a structure, if those are available?
The term "optimum" is hardly overloaded with semantic sense. In translation from Latin it means "best" and connects with goddess Opa – the goddess of fertility and crop from ancient italian tribe Sabin [14]. Afterwards goddess Opa has become the wife of god of time Saturn and mother of Jove. She is represented as keeping in one hand the horn of mythical boons abundance, and in other hand - weighter, symbolizing measurement and solution.

Danilin Alexander. Stiffness Optimization of Airframe. Page 7
When the word "optimum" is used, in it is always meant criterion, on which this engineering solution is best. This criterion can be a unique property of structure and can be the whole complex of properties. Besides in particular case of optimization on a final structure can be apply a lot of limitations, for example: stiffness of elements should be in specific range; the first natural frequency should be more given value; the deformations of certain points should not be more permissible values, etc. That is, when we speak about an optimality of a structure, it is necessary to indicate a criterion of an optimality, project limitations taking into account, and conditions of structure job.
The Navier at primary statement of inverse problem of a structural mechanics has indicated at once two criterions: the minimum of volume at a maximum of resistance, that from a point of view of the modern theory of optimum designing requires multicriteria optimization. The criterion of an optimality is usual single; if a problem multicriteria, the convolution of criterions is applied, or the "superfluous" criterions are transferred into limitations [15], or the project, optimum in sense from Pareto [16,17] is located.
In theory of building, in aircraft engineering, space-rocket building and some branches of engineering criterion of an optimality is weight, or specific consumption of materials of a design. Also in engineering methods of optimization, or, as them still name abroad, methods of optimality criterions, scientists investigate the properties of optimal projects satisfying to imposed limitations, and on their basis create the iterative procedures of searching of designs possessing these properties. That is, actually criterion of an optimality of the project as the minimum of weight of a design is substituted with other criterion connected to fulfilment of the certain requirement, for example: uniform strength, uniform stability, given level of deformations energy, etc.
In the present book a term " optimality criterion " we shall use in a broad sense, namely: not only as the minimum condition of weight of the project, but also for a label of properties of a design, which is necessary to achieve. We shall underline again, that achieving of these properties, that is the fulfilment of optimality criterions at certain or any real conditions provides for structure it minimum weight or value of weights close to minimum.
The basis of methods of optimum designing with use of properties of optimum designs have
pawned in our country by researches of I.M.Rabinovitch, Ju.A.Radzig, A.I.Lurye, A.A.Komarov and other scientist.
Not stopping explicitly on methods from these scientists we shall mark, that all their results have the deep study and use of properties of elastic systems and suggest very effective computational procedures.
In a series of methods of optimality criterions the special place is taken by methods based on minimizations of deformations energy. As a basic property of the optimum project in that methods is used the equality of specific potential energy of elastic deformation in all elements of structure made from preliminary given volume of a material. Such requirement is equivalent to the minimum condition of potential energy of deformations and results to systems of maximum stiffness, if stiffness to consider as value, inverse to energy of deformations.
Fundamentals of this group of methods were incorporated by the Polish scientists Z.Wasiutinsky [18] and in Russia by A.A.Komarov [19,20]. Developed algorithms of searching optimum of designs have iterative character and work very fast; it is enough 5...8 iterations for engineering accuracy. The idea of minimization of potential energy of deformations has appeared fruitful and widely is used till now.
Summarizing explained we resume, that the idea of properties extremeness in real processes was
excellent confirmed in various areas of physics and in mechanic-mathematical sciences such as the

Danilin Alexander. Stiffness Optimization of Airframe. Page 8
theory of optimum control, mathematical theory of elasticity, operator calculus, theory of stability, optimum designing, operations research, non-linear programming etc.
The present book is devoted to account of methods of designing of load-carrying structures, therefore our brief review has a narrow directivity and does not concern a fascinating and instructive material connected to use of minimax principles in thermodynamics, electrodynamics, mechanics of atmospheric and space flight and in other areas.
1.2. Optimization and computer support of designing. Methodological aspects. Despite of universal propagation of computers, the degree of a practical realization of optimum
designing of building, land transport also air-transport and space designs is not sufficient till now. For the analysis of a usual situation we shall consider ways of statements and solution of design problems.
The most formalized way of statement and solution of a design problem is it the formulation and solution with use of methods of non-linear programming. At such approach the following operations are executed. We must create the mathematical model of object permitting to define all it characteristic. We must select the independent design variables, which should supply to some selected characteristic of project quality called as criterion function, minimum value. We must define all imposed limitations including range of change of a design variable, restrictions of strength, deformations; technological limitations, etc. Formally it is wrote so:
, ,..., = min, )V( 21
TnxxxXX ⇒ (1.3)
by 1,2,...n; = i ,b x ii ≤≤ia 1,2,...m; = j 0, )(g j ≤X Where V(X) - criterion function;
X - vector of a design variable; ai, bi - geometric limitations for design variables; gj(X) - functional or algorithmic limitations on functionability or condition of object; n - quantity of a design variable; m - quantity of functional constraints.
After that we must use some method of searching of object function extremum, which determine parameters and characteristics of designed object.
The description of methods of searching of an extremum used in optimum designing, is possible to find in many books, monographies, articles and many other. Among them we recommend [21,22] as very clear.
The method of the solution of design problems with use of non-linear programming has the strong and weak legs. As virtues it is possible to show their universality for application to particular practical problems. Just this feature has resulted at the end of 60-th - beginning of 70-th years in a broad penetration of non-linear programming in optimum designing of structuress. The first application, probably, was realized by Kicher [23] for designing reinforced shells with minimum weight. In the beginning of 70-th years there were many programs of searching of extremum which were combined in library, so that to user for the solution of a particular problem was enough only write function programs and checks of imposed limitations. However common rejoicing has fast passed. To a middle of 70-th years it has become clear, that the being available capabilities of optimization of structures based on methods of non-linear programming, require extremely large costs of computational time and are suitable for problem solving of designing of structures with very limited

Danilin Alexander. Stiffness Optimization of Airframe. Page 9
sizes both of quantity of a design variable, and of number of limitations. Despite of successes in development of algorithmic base of methods of searching of an extremum and refined programming, minimum of criterion function is possible to achieve on average (n/2...2n2) calculations of criterion function and limitations [21, 24 ], where n - quantity of a design variable. The floor level concerns to case, when the criterion function and limitations can be wrote as quadric form. At designing of air structures, when they are simulated with the help of finite element method and as design variables the thicknesses and areas of cross sections of design elements are selected, for the description of object with an adequate accuracy it is necessary from several hundreds up to ten – twelve and more thousands of variables. It is clear, that the time of the computation disastrously grows, and with taking into account quadratic relation of time to number of design variable there is a problem accessibility of the optimum solution in established calendar terms. Besides for check of limitations it is necessary to determine the strain-stress distribution of a structure, that in itself is difficult computing problem. On simplifications of models the designers go reluctantly, preferring to have non-optimum project, but with authentic characteristics. Thus, despite of a generality and universality of methods of non-linear programming, the application them in practical activity limits by simple structures with small number of a design variable.
The enamourment by methods of non-linear programming has not passed without leaving a trace. From them has grown the new direction in methods of optimization of structures, namely: methods of the analysis of sensitivity [171]. The strategy of searching of an extremum, when for reaching a minimum it is necessary to move in space of a design variable on a direction of an antigradient of criterion function, has resulted in idea of an evaluation of gradients of the characteristics of a design (functional constraints) on design variables. It is so-called factors of sensitivity, which show as unit change some design variable influences on change of any global characteristic of design, for example: how changing of thickness of some panel of a wing influences to speed of a flutter. It was found out that many derivatives could be calculated analytically, without analysis of the whole structure [25]. Having factors of sensitivity, the designer can implement heuristic optimization in the dialog mode, or to reveal for each element active limitation, or to take advantage of any strategy of change design variable with the purpose of improving the characteristics of project, or to evaluate deviation of the current project from optimum, etc. By opinion of L.A.Schmit [26] analysis of sensitivity play the key role in a modern methodology of optimum designing, which should be combined finite element method, analysis of sensitivity and methods of optimality criterions. At the same time, in real designing this method penetrates very hardly. The reasons here, on our opinion are two. At first, the factors of sensitivity show sensitivity of the characteristics of project at current values of a design variable. If the project has varied, the factors of sensitivity vary also. For example, if as design variables are adopted thicknesses of elements, then for different distribution of a material we will have various values of factors of sensitivity. In case statically indeterminate structure there is relation of internal forces from distribution of a material. And here the designer, changing a thickness of elements, for example, in region mean spar of a wing, suddenly will find out, that the factors of sensitivity have varied not only in the zone of modified elements, but also on a whole wing, and have varied not in one direction. At such situation to conduct optimization manually, being based only on factors of sensitivity, it is rather inconvenient. And here factors of sensitivity discover the second negative property. They show to what changes of the watched characteristic of a design the single variation of a design variable will cause, but do not explain WHY this change will happen. The designer should blindly trust received values without a penetration in physical essence of that or other mechanical process, in which the designed structure should work. The qualification of the designer does not grow, and the obtained optimum project should be additionally analyzed to confirm required level of authenticity for decision making.

Danilin Alexander. Stiffness Optimization of Airframe. Page 10
At the same time, there is a case, when the factors of sensitivity are simplly irreplaceable. Very frequently it is necessary to give designer the information on what characteristic of project determines stiffness of elements in this or that its part. For example, the thickness of an element number ”i” is determined by stress constraint; number ”j” – requirement of ailerons reverse absence; number “k” - requirement of a flutter absence, etc. In other words, it is necessary to determine active limitation for each design element of the total project. The calculation of factors of sensitivity decides this problem and incidentally allows to reveal reserves, being available in a design.
The indicated reasons do not allow mathematical methods of optimization widely to penetrate into practical designing even in such progressive and advanced areas of engineering as aircraft and space rocket creation. Despite on development of the broad nomenclature of program complexes realizing various methods of optimization, in practice are used the alternative designing with manual optimization with using high-precision models containing great number of design variable and requiring for single analysis a lot of computer resources. Methods of optimality criterions hardly find a use even with their high effectiveness on required quantity of evaluations of object function and limitations. Let's stay on them more in detail.
General problem of optimization of a design, when design variables are stiffness characteristic of
elements, and as criterion function we use a volume of load-carrying material, can be formulated as follows.
To find a minimum of a function
∑ ⇒n
1=iii min xS = V (1.4)
by limitations 1,2,...m. = j ,0≤−= jjj CCg (1.5)
For the solution of problem (1.4), (1.5) it is created the function of the Lagrange:
∑∑==
−+=m
jjjj
n
ii CCS
11i );( x),( λλXL (1.6)
where factors 0≥jλ - are factors of Lagrange. The minimum conditions of Lagrangian (1.6) are:
∑=
=+=m
j i
jji
i xC
Sx 1
1,2,...n; = i ,0∂∂
λ∂∂L (1.7)
1,2,...m. = j ,0=−= jjj
CC∂λ∂L (1.8)
Pursuant to the theory of non-linear programming ratio (1.7), (1.8) are the optimality conditions or Kun-Tucker conditions. The equation (1.7) can be wrote as
∑∑==
−==m
jj
m
j iVS 1
i
i
j
i
jj
11,2,...n; = i ;1
x
xC
xC
1
∂∂∂∂
λ∂∂
λ (1.9)
that installs identical for all design variable the ratio of weighted sum of limitation derivatives to criterion function derivatives on any one design variable. It is so-called optimality criterion. Depending on a kind of limitations g(X) can have a various physical sense. The equations (1.8) guaranteeig fulfilment of applied limitations and in a combination with (1.7) will complete system (n + m) equations for finding n unknown design variable xi and m unknown Lagrange factors jλ . These

Danilin Alexander. Stiffness Optimization of Airframe. Page 11
equations are non-linear and in general case system (1.7), (1.8) can be solved by an applied iterative method, that is usually never done. At the solving of practical optimization problems it is required to receive the project of structure, which had volume close to optimum, instead of project, which precisely satisfied to mathematical optimality criterions. It can be achieved by designing a structure with taking into account one or two most important limitations and by checking up, how the project satisfies to remaining limitations. Analyzing the working conditions of structure, the designer can accept the justified solution on what limitation is critical and in accordance of it to select an approaching optimality criterion.
Here we approach to a key point determining popularity or unpopularity of a method for engineers. In general case the most important criterions of applicability that or other method are it a transparency and efficiency. Just these qualities determine a practical reliability of any method and guarantee against incorrect use. For optimality criterions, the transparency means fullness of ratio (1.7) or (1.9) precise physical sense, which will determine properties of the project, obtained in the future. In practical designing the ideas equal strength in all elements of structure, equality in all elements specific energy of deformations are well recognized, however very difficultly wins confidence, for example, such optimality criterion [27]:
,W [M]
W [m] W W [K] x
1j
jiTj
2ji
i
1Tj
jTj
i WW
Sωλ −
⋅= (1.10)
received at optimization with limitation of dynamic stiffness of structure. Here: Wj - j-mode of natural vibration; jω - natural j-frequency; [K]i and [m]i - accordingly stiffness and mass matrix connected with i-element; [M] – mass matrix of the whole structure. It is difficult even to give a criterion (1.10) the verbal formulation. The rushing of the authors to decide problems in the general view, not superimposing on job of a structure limiting assumptions, frequently results to optimality criterions with inappreciable even for authors physical sense. Not belittling a significance and functionality of such criterions, mark, that by difficulties of their understanding, they call in the designers wary mistrust and are applied usually only then, when the capabilities of other criterions are exhausted. In that circumstances is the reason of undeserved weak penetration of methods of optimality criterions in designing of industrial structures.
Fourth and last direction in our analysis of the modern theory of optimum designing is connected to development of analytical methods of optimization. As a rule analytical methods will realize classical methods of optimality criterions, but not for discrete, and for continuous elastic systems, which properties are described with the help of ordinary differential equations or partial differential equations. The optimality conditions connected with behavior of structures, are derived with the help of methods of variational calculus, theory of optimum control and extreme principles of a mechanics. As to the solved problems, it, as a rule, are elementary problems, such as beams with variable cross-sectional area, elastic rods working for torsion, plates of a variable thickness with simple geometry and conditions of fastening etc. However analytical approach attracts in optimization problem solving many researches, as allows to discover general properties and typical singularities of optimum structures. Alongside with other, the analytical methods help deeper to understand a true nature of problems and to receive new knowledge. This is their most important value for a science.
The experience of development, implementation and maintenance of CAE-systems for designing
of structures allows us to formulate the requirements to computational methods for designing of a load-carrying structure of a flight vehicle.

Danilin Alexander. Stiffness Optimization of Airframe. Page 12
1. Universality in combination with an adequate accuracy in simulation of behavior of real structures. It assumes capability of designing and analysis of any 3D thin-walled structures on any spectrum of loadings with allowance for of broad nomenclature of limitations; the descriptions of load-carrying elements with a various details; taking into account any boundary conditions.
2. The methods should be oriented on their using by engineers. This requirement includes a theoretical transparency and efficiency of methods, capability of the visual physical interpretation of computing processes, and also fast evaluation of results proceeding from reasons of common sense and]or of physics of process. At a realization of methods it is necessary to supply the friendly interface including a simplicity of preparation and debugging of input data, insensitivity to error of the user, simplicity of software management, formulation the results in customary terms and concepts of engineers-designers.
3. The methods should have high perfomance both on machine, and on calendar time from moment of problem statement till completing of the solutions analysis. In this way is necessary not only development of fast algorithms, but also broad use of graphic representation of results.
4. The methods for the realization should not require the unique equipment (supercomputers). All these requirements should be taken into account at selection or development of methods of
optimum designing intended for a realization in the software for actual designing of load-carrying structures.
2. Designing on strength conditions
2.1. Energy of deformations. Structure with uniform strength. Let's consider a problem of search of the thin-walled structure created from the pre-given volume
of a material and having the minimum energy of deformation in a single loading. Energy of deformation represents job of internal forces in straining process and generally for
unitary volume of any design can be calculated as [28]
, 0
ijij
ij
ij
dU εσε
ε∫=
= (2.1)
Where σ ij and ε ij - stress and deformations tensor components, and U is called as specific potential energy of deformations. If straining process is reversible, then behaviour of a material is elastic. Job of internal forces does not depend on an integration way, therefore size U can be interpreted as elastic potential in a design point. Full energy of deformations results by integration on design volume of value U :
∫∫∫=V
dVUU (2.2)
From the resulted definitions follows, that the elastic potential of elementary volume of a structure can be calculated as
.dVdUU = (2.3)
At elastic deformation for an element k the designs, having a constant field of deformations (stress) and working in a plane stress condition in co-ordinates xoy, specific potential energy of deformations (elastic potential of an element) will write in a kind

Danilin Alexander. Stiffness Optimization of Airframe. Page 13
[ ] kyyxxkU 21 γτεσεσ ++= , (2.4)
And full energy of deformations will be equal to the sum of elastic potentials of all elements multiplied on volumes of corresponding elements:
. 1∑=
⋅=m
kkk VUU (2.5)
Here: εσ , - normal stress and deformations in k-th element; γτ , - shear stress and shift deformation; Vk - volume of a material of an element k; m - quantity of elements of a structure. The equation (2.5) by taking into account (2.4) will become:
[ ] ; 21 m
1kkkyyxx VU ⋅++= ∑
=
γτεσεσ (2.6)
From here the analogue of the equation (2.3) for discrete structure with a constant field of stress in each element follows:
[ ] . 21 m
1k∑=
++== kyyxxk
kdVdUU γτεσεσ (2.7)
Thus, for the thin-walled structures which elements work in plane stress condition, we have the following problem of optimum designing.
To find distribution of material Vk, k = 1,2, … m which in a single loading provides a minimum of energy of deformations of the structure created from the pre-given volume of a material:
1,2,...m; k min, 1
=→⋅=∑=
m
kkk VUU (2.8)
by V = V0. (2.9)
Here: Vk - volume of a material of k-th element; m - quantity of elements in a design;.V0 - the
distributed volume of a material. To solve the task we will apply a method of Lagrange undetermined multipliers. We will make
function:
, 1
01
−+⋅= ∑∑
==
m
kk
m
kkk VVVUL λ (2.10)
where λ - Lagrange multiplier. Conditions of a minimum of Lagrange function which provide the decision of a problem of
optimisation (2.8) - (2.9), with taking into account (2.7) will be write in a kind:
;...2,1 ,0 mkUVL
kk
==−=∂∂ λ (2.11)
.01
0 =−=∂∂ ∑
=
m
kkVVL
λ (2.12)
The equation (2.11) represents optimality criterion which establishes, that in the structure created from the pre-given volume of a material will have the minimum of potential energy of deformations if the elastic potential (specific energy of deformations) each element has identical value:
;...2,1 , mkconstU k === λ (2.13)

Danilin Alexander. Stiffness Optimization of Airframe. Page 14
For construction of procedure of search of material distribution Vk, k=1,2 … m, providing satisfaction of criterion (2.13), we will express elastic potential of an element (2.4) through the force factors in an element, namely: through internal force flow R = δσ ⋅ , where δ - a thickness of an element, and σ - stress of a corresponding direction. Taking into account Hooke's law for a plane stress condition the elastic potential (2.4) of elements will be expressed in a kind:
( )[ ]
( )[ ]
[ ] [ ]; 21
2
122 2
122 2
1
*22
2
22222
2
222
kk
kkk
k
kkyxkyxkkk
k
kkyxkyxk
k
RV
RVE
S
TRRRRSE
S
EU
==
=++−+=
=++−+=
µµδ
τµσσµσσ
(2.14)
where
[ ] [ ] ( )[ ] kkyxkyxk
kk
k
kk TRRRR
ESR
ESR 122 222
22* µµ ++−+== . (2.15)
In formulas (2.14) - (2.15): Sk - the area of k-th element in the plan; Ek, µ k - the module of elasticity and Poisson’s factor of a material of k-th element, T = δτ ⋅ - a shear force flow.
Substituting (2.14) in optimality criterion (2.13) we will receive:
2
*
2][
k
k
VR
=λ . (2.16)
Expressing from (2.16) Vk and substituting it in (2.12), we will receive value λ - which is provided elastic potential identical to all elements with the pre-given volume of material V0:
20
2
1
*
2
* 2][
2][
V
R
VRU
m
k
k
k
kk
===∑=
λ (2.17)
From the formula (2.17) it is possible to receive value of volume of a material of each element opt
kV in optimum by criterion (2.12) structure:
;2
][
2][
*
1
*0 k
m
k
k
optk
R
R
VV ⋅=
∑=
(2.18)
Taking into account expression (2.15), and also that for flat element Vk = δ k Sk, the formula (2.18) can be transformed into a kind:
.2
][
2][
1
0
k
km
k k
kk
optk E
R
ERS
V⋅
⋅
=
∑=
δ (2.19)
Let's notice, that here [Rk] are calculated for initial distribution of thickness of elements δ k, k=1,2, … m.
Let's consider a special case [19] when it is supposed, that all elements of a design are executed from one material, that is Ek = E = const for k = 1,2, … m. Thus the formula (2.19) becomes simpler

Danilin Alexander. Stiffness Optimization of Airframe. Page 15
.][][
1
0km
kkk
optk R
RS
V⋅
⋅=
∑=
δ (2.20)
Let's express [Rk] through stress and we will substitute in the equation (2.20). [ ] ( )[ ] ;] [ 122 222222 eq
kkkyxyxkkR σδτµσµσσσδ =++−+= (2.21)
.
1
0 eqkkm
k
eqkk
optk
V
V σδσ
δ ⋅⋅⋅
=
∑=
(2.22)
Let's enter concept average stress according to expression:
.0
1. V
Vm
k
eqkk
eqav
∑=
⋅=
σσ (2.23)
In accordance with the decision of optimization problem this average stress should be identical to all elements of a structure, therefore instead of the task of volume of distributed material V0 and the subsequent analysis of the reached level of stress, we can appoint at once allowable level of equivalent stress [σ ] and to receive the known formula [would see for example, 29] for algorithm of structure of uniform strength search:
.] [ k
eqkopt
k δσσ
δ ⋅= (2.24)
Structure of uniform strength we will call the structure at which an identical level of stress is
reached in each element (point). Level of stress is estimated by equivalent stresses which are connected with strength theories. By
minimization of energy of deformations equivalent stress should be counted up under the IV- strength theory.
Thus, by action of a single loading, the structure made from an identical material of finite volume
for which the requirement of a uniformity of elastic potential in each point is fulfilled, will be structure of uniform strength, and will have minimum necessary volume of a material.
This theoretical result is assumed by many researchers as a basis at construction of algorithms of
engineering optimization on durability conditions. Frequently the formula (2.24) is used and for the designs consisting of various materials, - consequences and the correct way of such application we will discuss in another book.
For completeness we will consider a little bit other in comparison with the formulation (2.8) - (2.9) statement of an optimizing problem.
To find distribution of material Vk, k = 1,2, … m which in a single loading by a preset value of energy of deformations U0, provides a minimum of material volume of a structure:
1,2,...m; k min, 1
=→=∑=
m
kkVV (2.25)
by
01
UVUUm
kkk =⋅=∑
=
. (2.26)
Lagrange function in this case looks like:

Danilin Alexander. Stiffness Optimization of Airframe. Page 16
. 1
011
⋅−+= ∑∑
==
m
kkk
m
kk VUUVL λ (2.27)
Writing down conditions of its minimum, we will receive the optimality criterion coinciding with criterion (2.13):
;...2,1 ,1
1mkconstU k ===
λ (2.28)
which at the account of a condition (2.26) will be transformed to a kind:
;...2,1 ,
1
0 mkconstV
UU m
kk
k ===
∑=
(2.29)
From here follows, that performance of a condition of elastic potential constancy in each point of a structure provides in a single loading or
1) a minimum of potential energy of deformations by pre-given volume of material of a structure, or
2) a minimum of volume of material of a structure at the set level of potential energy of deformations.
Very often received conclusions are called in question as by conclusion of optimality criterion and
formulas we did not consider dependence of stress distribution also elastic potentials in structural elements from material distribution. The matter is that definition of elastic potential (2.1) - (2.5) is entered at invariable distribution of material δ k, k = 1,2, … m.
Let's show, that all earlier resulted reasonings have necessary generality. An optimization problem we will consider in the form of (2.25) - (2.27), but at record of necessary conditions of a minimum Lagrange function we will assume, that the elastic potential depends on material distribution so derivative of energy of deformations will write in a kind:
( ) ( )=⋅∂∂
+⋅∂∂
=
⋅
∂∂ ∑∑
−
≠=
1
1
m
kiii
kkk
k
m
kkk
kVU
VVU
VVU
V
=
∂∂
+∂∂
+∂∂
+∂∂
= ∑−
≠
1m
ki k
iii
k
i
k
kkk
k
k
VVUV
VU
VVUV
VU
.1
1
∑∑=
−
≠
∂∂
+=
∂∂
++∂∂
=m
ii
k
ik
m
kii
k
ikk
k
k VVUUV
VUUV
VU (2.30)
Here we have temporarily taken out energy of k-th element from under a sign on summation and by differentiation have considered that fact, that volumes of elements vary independently.
Conditions of a minimum of Lagrange function (2.27) with taking into account (2.30) will become:
;...2,1 ,0 11
1 mkVVUU
VL m
ii
k
ik
k==
∂∂
+−=∂∂ ∑
=
λ (2.31)
∑=
=⋅−=∂∂ m
kkk VUUL
10
1.0
λ (2.32)
From the equations (2.31) we will express kU :

Danilin Alexander. Stiffness Optimization of Airframe. Page 17
;...2,1 ;1
1mkV
VUU
m
ii
k
ik =
∂∂
−= ∑=λ
(2.33)
Also we will substitute in the equation (2.32). We will receive:
∑∑ =
=
∂∂
+=m
ii
k
im
kk
VVU
V
U
1
1
01λ
. (2.34)
The criterion of an optimality (2.33) taking into account (2.34) will assume the definitive appearance:
;...2,1 ;
1
0 mkconstV
UU m
kk
k ===
∑=
(2.35)
what completely coincides with the criterion (2.29) received without the obvious account of dependence of elastic potential from material distribution. Certainly, such dependence exists, but indirectly - through stresses operating in structure elements.
From here follows, that the optimality criterion in the form of the requirement of identical value of
elastic potential in each point of a design has necessary generality and is applicable for optimization of any types of structures.
The natural algorithm of optimization looks as follows. 1. We will appoint some initial distribution of material δ k0 on structure elements and we will
calculate its volume V0. 2. We will carry out calculation of strain-stress distribution of a structure and we will calculate
equivalent stress eqk 0σ in each element of a structure k=1,2, … m.
3. On the basis of optimality criteria and taking into account specificity of structure configuration and working conditions we will calculate new thickness of elements. Also we will count up value of elastic potential in each element k=1,2, … m.
4. We will calculate the minimum and maximum values of optimality criterion: λ min and λ max. If the divergence is insignificant, the algorithm finishes the job. Otherwise we will accept the received distribution of material δ k as initial and we pass to point 2.
We intentionally do not result in a body of algorithm the derived formulas as practical realization
of this very simple sequence differs the big author's variety. The reasons for that in the following. 1. If the initial structure is statically determinate then the algorithm converges for one iteration
as specific energy of deformations (elastic potential) does not depend on material distribution (thickness of elements), and is defined only by external loadings. If an initial design is statically indeterminate then change of material distribution leads to redistribution of internal streams of forces. Therefore it is necessary to repeat iterative process until stop criterion performance. We did not meet in the accessible literature use of elastic potential as such criterion though it is most theoretically proved. Many authors take small change of material volume of a design as measures of achievement of an optimum (!?!).
2. How to be, if the structure is subject for application of loading spectrum? Some researchers [20] understand the balanced life as non-exceedance of stress from each loadings of allowable stress value in according to an element material. In this case say, that the thickness is appointed as « envelope on stress». In building, on the contrary, all loadings spectrum it is accepted to lead to

Danilin Alexander. Stiffness Optimization of Airframe. Page 18
the maximum loading (usually by vector summation) and thickness to appoint proceeding from such maximum loading. In aircraft such approach is inadmissible, as loading aboard the plane operates both upwards and downwards whereas the vertical force operating on a building is usually force of gravitation (if seismic loading is not considered). In this case the thickness is appointed starting with « envelope on loadings». Whether there will be a found structure optimum?
3. How to arrive, if it is initially known, what the structure should consist of various materials? In the resulted algorithm in this case we consider correct to use formulas (2.19), (2.21), however other approach is typical. The material is considered identical, optimization with use of the formula (2.24) is implemented, and then thickness of elements are recalculated so that to save the received value of element’s stiffness (E δ ), where Е - elasticity module, and δ - thickness of an element. Thus there can be an infringement of strength conditions that it is possible to correct by proportional increasing of all elements thickness. But optimality leak is thus inevitable.
4. What elements to model a structure? How to be, if within an element we have a variation stress field and the thickness of an element for technological or other reasons should be identical in all points? Stress in what point of an element to accept as factored stress?
The list of questions can be continued and the designer who is engaged in real designing, solves
arising problems taking into account specificity of structural job of a developed structure. For this reason algorithms of optimum designing taking into account strength are various, their construction leans against experience and intuition of the designer and is on the verge of art. In general, methods of structural optimization are an extensive and creatively fertile area of a science and engineering, in which else many unresolved problems. Thereupon we recommend the book [30] where the basic achievements of optimum designing by a boundary of 20-21 centuries are stated and which name in Russian is spoilt by the translator: English «Structural Design» it has translated into Russian as «Building Designing».

Danilin Alexander. Stiffness Optimization of Airframe. Page 19
It is better to bend, than to burst.
James Gordon [31, page 111]
If with the people sometimes it is possible to argue and in some cases them easily to deceive then to argue with physical phenomena is useless.
James Gordon [31, page 362]
3. Designing with stiffness requirements
3.1. Stiffness requirement for air structures. Problem definitions
The problems of stiffness in aviation have arisen from its most germing. The maiden designer,
who had damage from poor stiffness of wings, was, apparently, Professor Samuel Langley [32]. The emergency of a monoplane of his design on the river Potomac in October, 1903 has taken place because of wing divergence [33]. The successful flight of a biplane of the brothers Right on December 17, 1903 for a long time has determined the dominating scheme of airplanes. To necessity in general theory of aeroelasticity, to taking in account the stiffness requirements on a design stage, the scientists and designers came in the beginning 30 years, when the airplanes monoplanes have reached a velocity about 100 meter per second (350 km\hs) [34]. However approximately in the same time were designed the thick aerofoil profiles, which one have found broad application. The large structural depth of wings in combination to a smooth stressed skin by taking into account only strength conditions provided necessary stiffness for all range of operating speeds. Therefore in designing the stiffness of a structure was evaluated on a final stage by a series of check calculations of critical speeds of a reverse, flutter, divergence etc.
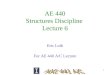
On nature of interplay with an environment it is possible to class the aeroelasticity problems, as it
has offered Collar [36], with the help of a triangle of forces, fig. 3.1. In tops of a triangle are placed three types of forces, introduced characters A, E and I,
accordingly Aerodynamic, Elastic and Inertial forces. Each phenomenon of aeroelasticity can be submitted according to the connections with these three tops. The dynamic phenomena lie inside a triangle and are connected to all three types of forces. The phenomena of static aeroelasticity have no connection with inertial forces and lie out of Collar triangle.
Without dependence from a considered phenomenon, in aeroelasticity, as well as in structural mechanics [35, 10], it is possible to allocate two classes of the tasks: direct and inverse. The direct tasks are formulated as following. The geometrical, inertial, aerodynamic, elastic characteristics of a flight vehicle are known. It is required to determine, on what flight phase, that is at what altitude, velocity, controls displacement, etc. there will be this or that aeroelastic phenomenon.
The inverse tasks of aeroelasticity are much more difficult. In them it is necessary to determine necessary inertial and/or elastic characteristics of flight vehicle and its aggregates, in order to the conditions of beginnings of undesirable aeroelastic phenomena were outside of operational flight conditions.

Danilin Alexander. Stiffness Optimization of Airframe. Page 20
Fig. 3.1. Aeroelastic phenomena: F - flutter; B - buffet; DR -
dynamic response; DS - dynamic stability; Rv - reverse of ailerons and air rudders; D - divergence; CE - control efficiency; LD - air loading distribution; SS - static stability; R - influencing of aeroelasticity on an aerodynamic drag.
For the first time inverse task of aeroelasticity was formulated by A.I.Makarevsky [37] and real
need for methods of the solution of such tasks the designers become to feel with appearance and development of a jet aviation. Growth of flight vehicle velocities, increase of accuracy of designing, increase of breaking points of the basic structural materials at minor increasing of their moduluses of elasticity have resulted that at operational loads become to appear large deformations and alongside with strength requirements, limitations on stiffness have begun to act as major. And there was a necessity to take into account stiffness on possible earlier design stages, as the requirements of aeroelasticity have begun actively to influence on an airplane form and its mass efficiency. In this connection it is interesting to note, that layout of engines on airplanes of the Boeing Corporation, since the Boeing - 707 is dictated by reasons of aeroelasticity. Besides by one of the relevant reasons of refusal of the Boeing Corporation from the project of a supersonic airliner with a variable-sweep wing was absence of reasonable means for solution of aeroelasticity problems [38].
Interesting and, on our view, the rather perspective approach to the tasks of aeroelasticity has
offered by R.I.Vinogradov [39]. He did not begin to exclude aeroelastic phenomena, and has offered to use positive effects, available in them. On the basis an accurate study of working of elastic structures at beginning of self-energizing oscillations in a flow of incompressible gas R.I.Vinogradov developed the theory of calculation of maximal amplitudes of these oscillations and on its fundamentals was concluded about admissibility and even usefulnesses of structure oscillations. Usage of self-oscillations allows receiving doubling lift as contrasted to not oscillating wing at preservation to invariable drag value. That is, the lift/drag ratio doubles. Confirming these outcomes by him are constructed and are tested dynamic wind turbine, hydroplane with self-oscillating hydrowing and wing with self-oscillating leading edge flap. However strong requirements on an air safety and safe life of air structures do not allow using self-oscillations of flight vehicles aggregates within the framework of modern materials application.

Danilin Alexander. Stiffness Optimization of Airframe. Page 21
Now at designing of air structures the aeroelastic phenomena are considered invalid. To avoid its the designer can vary by the inertial and elastic characteristics of a flight vehicle. However in practice the inertial characteristics usually hardly preset, or admit variation in very small range. Therefore it is usually as a result of the aeroelasticity inverse task solution designer determines the required elastic characteristics of a structure, which one are set as so-called stiffness requirements.
The stiffness requirements for different aeroelasticity phenomena are formulated variously. In the
tasks of static aeroelasticity stiffness requirements are preset as limitations on deformation under loading. And in case of a wing as the measure of stiffness all of its structure is considered the displacement of some selected cross-section called characteristic or reference. For the first time this term has entered Theodorsen [40] by the solution of the flutter problem. At definition of aerodynamic loadings he has exchanged the analysis of three-dimensional flow around the finite span wing by consideration of a two-dimensional flow around of a profile of reference cross-section, selecting its properties so that they met to inertial and elastic properties of that actual wing cross-section, which one is apart 70...75% of a semispan from axial cross-section. Despite of successes reached in the field of computing aerodynamics, permitting to calculate non-steady flow around an arbitrary shape wing, the method of usage of deformations of reference cross-section as criterion of stiffness has stayed rather fruitfull and brings quite good results.
For dynamic phenomena usually limit some maiden natural frequencies, but sometimes there are
limitations on combinations of frequencies [41]. Besides for complex combined systems it is important, that one part of a structure was not an oscillator for other, that is, that one part of a structure did not call self-oscillations of other part. As the example can be served a wing with the engine attached by a pylon, see Fig. 3.2. If a pylon to attach in an origin of any natural oscillations form of a wing, the minor lateral oscillations of a pylon will originate resonance oscillations of a wing.
Fig. 3.2
The main property of the stiffness requirements for the air structures is that for static
aeroelasticity they are connected to one kind of deformations, and for dynamic phenomena - with one critical frequency of natural oscillations.
In the requirements of static aeroelasticity such kind of deformations usually are the torsional
deformations of along-stream wing sections, because the twist values determine angles of attack and consequently aerodynamic forces. Thus, the bending deformations have no matter; this circumstance opens new capabilities for optimization of structures swept and delta wings, for which one the bending and torsional deformations are interdependent. So, for example, loosening a trailing edge of a delta wing in a direction of span and allowing thereby large vertical displacement, it is possible to reduce the

Danilin Alexander. Stiffness Optimization of Airframe. Page 22
twisting of along-stream sections. Naturally weakening is necessary to implement not to the detriment of strength.
The methods of optimum designing with taking into account the requirements of static stiffness
should have selectivity to kinds of deformations and reliably determine not only area of a structure, where it is necessary to add a material for reaching demanded stiffness, but also area where it is possible to weaken structure, for increasing of demanded deformations.
As far as we know from the literature, such approach till now was not applied.
The stiffness requirements for phenomena of dynamic aeroelasticity usually connect to threshold value of the lowest frequency of some form of natural oscillations; if the structure has an appropriate natural frequency below threshold, at operational conditions of flight there come self-oscillations.
Thus, we have following task formulations for optimum designing with taking into account
requirements of aeroelasticity. Static aeroelasticity. To find such stiffness values of the structure items, which one without a
breach of strength conditions provide given deformations in one or several flight phases and have a minimum volume of a load-bearing material.
Dynamic aeroelasticity. To find such stiffness values of structure items, which one without a
breach of strength conditions provide a set value of the lowest natural frequency of a given type, for example, lowest torsional or lowest bending, and have a minimum volume of a load-bearing material.
For wing’s thin-walled reinforced structures in concept stiffness values enter: skin thickness; wall
thickness of spars, ribs; the areas of spar booms and rib booms; volume and orientation of a stiffened structural arrangement. Let's hereinafter, for short, we shall name the stiffness requirements for static and dynamic aeroelasticity accordingly as static and dynamic stiffness requirements.
3.2. Limitation on elastic displacement as inequalities
3.2.1. Designing only on a stiffness condition
Let's consider the task about searching of a structure of a minimum volume, which one in an
alone loading has given generalized displacement (either a displacement or a rotation such as twist). Let's find the solution while disregarding of strength conditions.
In a direction of constrained displacement we shall apply element generalized force (unit load)
and with using the formula of Maxwell-Mohr1
1 This is also referred to as the unit load or dummy load method.
) we shall calculate displacement, guessing, that the structure is broken into m finite elements, each in a plane stress condition, so that:

Danilin Alexander. Stiffness Optimization of Airframe. Page 23
,dS ][i
1
*
∑ ∫=
=∆m
i S ii
i
iERδ
(3.1)
])1(2)()([][ *xyixyiixiiyiyiyiixixii RRRRRRRRR µµµ ++−+−=
Here iiiR δσ= represent internal forces in element i due to the unit loading; iiiR δσ= represents
internal forces in element i due to the applied loading; iδ is the thickness of the element; iS is the planar area of the element; iE and iµ are the modulus of elasticity and Poisson's ratio of the element material.
Let's note one relevant circumstance. Here Maxwell-Mohr formula will be used not as a classic
means of an evaluation of factors in a canonical equations set for redundancy elimination, but in its pure, initial sense with using to structures with any degree of a redundancy.
Unit generalized loading and real applied loading are vectors of second member of equation in a
finite element method and consequently the internal forces iR and iR in elements are determined by a usual procedure of a finite element method. If finite elements with a constant stress field are used, Eqn. (3.1) becomes:
∑=
=∆m
i i
iR
1 i
i*
. E
S ][δ
(3.2)
This formula we shall use hereinafter. Equation (3.2) can be interpreted for rod elements; iS is
the length of the rod; iδ is the cross-sectional area; and, ][ *iR is the product of internal forces of the
basic and unit loading cases. Thus, we consider thin-walled structures, the elements which one work in a plane stress
condition. The volume of a load-bearing material will be written as:
∑=
=m
iiSV
1i. δ (3.3)
We minimize this volume under condition that:
∆ = ∆0 (3.4)
Here ∆0 is given value of generalized displacement. Let's consider in detail formula (3.2), previously having discussed some properties of elastic
systems. In statically determinate systems by static loading a forces in elements do not depend on
distribution of a material. In hyperstatic structures this relation takes place, however at the analysis (3.2) and during the solution of the problem
∑=
⇒=m
iiiSV
1min δ (3.5)

Danilin Alexander. Stiffness Optimization of Airframe. Page 24
Under condition of (3.4), we shall consider, that the forces in elements, so and ][ *iR are
invariable. That is, the task of designing for ensuring given stiffness we shall solve strictly for statically determinated structures and for hyperstatic structures the dependence of forces in structure elements from distribution of a material we shall take into account further, by construction of an iterative procedure of searching of the rational project. Within the each iteration a forces are considered invariable and according it we calculate new thickness on the basis the solution of the task (3.5). Such approach is applied in all engineering optimization methods, founded on optimality criteria.
The values of items in (3.2) display the contribution of each element to creation of constrained
displacement. If value ][ *iR is large, the displacement in many respects is determined by deformations
of i-element and adding in it material or transition into higher modulus of elasticity it is possible essentially to reduce general displacement. But if the value ][ *
iR is negative? As the unit generalized loading is applied into direction of undesirable deformations, the negative value of Mohr integral, displays, that in this area it is necessary to permit structures to be deformed as much as possible, therefore it is necessary to reduce stiffness of a element.
For illustration let’s consider the cantilever beam loaded with two forces, as shown in fig. 3.3à.
Let's demand to limit a rotation Θ angle, see fig. 3.3b. Let's apply on the end of beam in a direction (+Θ) unit bending moment 1=M and discover
distribution of Mohrs integrals computed in this case as
∫=L
M dzEJ
MMI . (3.6)
Let's assume for a simplicity EJ = const and then by a multiplication of the moment diagrams from real and unit loading we shall receive distribution of Mohr integrals lengthwise beam, see fig. 3.4
Fig. 3.3 Cantilever beam loading and deformation

Danilin Alexander. Stiffness Optimization of Airframe. Page 25
Fig. 3.4 Moment and Mohr integral diagrams
From the analysis of diagrams fig. 3.4 you can see, that the reduction of bending stiffness in 2
and 3 segments will result to increase Θ angle, while the reduction of stiffness in segment 1 will cause to its decreasing. The given value of tip section rotation Θ angle can be achieved either strengthening zone 2-3, or weakening zone 1, or making these operations simultaneously.
It is moreover, if there are the zones with negative Mohr integrals then it is possible to reach zero
value of constrained displacement, see fig. 3.5. Negative values of the Mohr integrals always identify design zones that are can be weakened to
satisfy displacement constraints. From Eqn. (3.2) we see that in these regions it is advisable to choose the minimum thickness allowed for strength, construction or other technological reasons.
Fig. 3.5
Therefore in Eqn. (3.2) we collect all terms bearing a negative term so that the equation is
written as
∑ ∑= +=
−=∆n
i
m
ni i
iiERR
1 1 i
i*
ii
i*
.
S ][~ ES ][
δδ (3.7)

Danilin Alexander. Stiffness Optimization of Airframe. Page 26
Here: iδ is the minimum allowable thickness of elements with negative contributions to the Mohr integrals; iδ
~ is the thickness of elements for which the Mohr integrals are positive; n is the number of elements where the Mohr integrals are positive.
Let's define two terms
∑=
+ =∆n
i
iR
1 ii
i*
,~ ES ][δ
(3.8)
∑+=
− =∆m
ni
iR
1 ii
i*
. E
S ][δ
(3.9)
Then .−+ ∆−∆=∆ (3.10)
And the condition (3.4) will look like
.−+ ∆+∆=∆ o (3.11) If, in zones with negative Mohr integrals, the minimally allowable thicknesses are used, the
thickness of these elements are eliminated as design variable and we find optimum distribution of a material only in zones with positive Mohr integrals. Thus, we have a task of conditional optimization: to minimize volume of a material of a design
∑=
⇒=n
iiSV
1i min ~ ~ δ (3.12)
with taking into account the condition in Eqn. (3.11). We will use Lagrange multipliers to find the solution. Let's define a function
),(~ 11
−+
=
∆−∆−∆+=∑ o
n
iiiSL λδ (3.13)
where λ1 - is the Lagrange multiplier. The conditions of a minimum of the function are:
;,...2,1 ,0~ ][1~ 2
*
1 niE
RL
ii
i
i==−=
δλ
δ∂∂ (3.14)
.01
=∆−∆−∆= −+o
L∂λ∂ (3.15)
From equations (3.14) we have
.][~ *
1i
ii E
Rλδ = (3.16)
Substituting Eqn. (3.16) into Eqn. (3.15) we find the Lagrange multiplier
( ).
][
2
2
1
*
1 −
=
∆+∆
=
∑
o
n
i i
ii E
RS
λ (3.17)

Danilin Alexander. Stiffness Optimization of Airframe. Page 27
Equation (3.16), accounting for Eqn. (3.17), can be written as
( ) 1,2,...n.=i ,][
][
~ *1
*
i
i
o
n
i i
ii
i ERE
RS
⋅∆+∆
= −
=∑
δ (3.18)
The expression in Eqn. (3.18) defines the “law of distribution” of a material for elements of the
design ensuring the constraint on the generalized displacement with internal forces iR and iR . Let's calculate the required volume of the design from Eqn. (3.12) by substitution of iδ
~ from Eqn. (3.18) and the minimally permissible thickness iδ .
( ) .
][
1i
2
1
*
∑∑
+=−
=+
∆+∆
=m
nii
o
n
i i
ii
SERS
V δ (3.19)
Let's examine Eqns. 23 and 24. In the presence of zones with negative Mohr integrals, that is at
0≠∆− , we have an opportunity to develop a design with a constrained zero generalized displacement: 0=∆o . In other words, we can create the structure, which one will be absolutely rigid concerning
constrained displacement. Moreover, the meeting the requirement ∆0 < 0 is possible, but provided that |∆0| < ∆–, that is it is possible to achieve, that the structure was deformed in the direction opposite to the actual deformations by initial distribution of a material. If the sites with negative Mohr integrals are absent, we cannot reduce the existing generalized displacement.
3.2.2. Property of the founded material distribution Expression (3.14), determining minimum condition of a material volume of a structure by
limitation ∆ = ∆0 we represent as follows:
,1~
][
12
*
λδ=
ii
i
ER (3.20)
or
1,2,...n.=i ,1V~ ~ ES ][
1iii
i*
constRi ==λδ
(3.21)
Substituting values ][ *iR from Eqn. (3.1) into Eqn. (3.21) and taking into account, that iiiR σδ~= ,
we receive
[ ] 1,2,...n.=i ,
)1( 2V~
S ~
xi
i
i
constEEE
xyixyiyiyixi
i
xyiixyi
i
xiiyiyi
i
yiixixi
i
=++=
=
++
−+
−
εσεσεσ
σµσ
σµσσ
σµσσ
δ (3.22)

Danilin Alexander. Stiffness Optimization of Airframe. Page 28
From here it is visible, that the Eqn. (3.14) determines the relevant property of the created in according with the Eqn. (3.18) project, namely: the specific energy of internal forces from unit loading, on deformations from real loading should be constant in all structure elements.
The condition (3.22) can also be considered as some generalization of the known Z.Wasiutynski theorem [18] about equality of a specific potential energy of deformation in all elements most of rigid structures made from a given volume of a material.
Really, let’s consider a little bit diverse formulation (3.11) - (3.12). Such distribution of a material let is required to find, which one at its given volume would supply minimum value of generalized displacement, that is
min,⇒∆+ (3.23)
by .~ ~
1i o
n
ii VSV ==∑
=
δ (3.24)
In this case the Lagrangian will be the following:
−+= ∑∑
==o
n
ii
n
i
i VSRL1
i21 ii
i* ~ ~ E
S ][ δλδ
(3.25)
And the conditions of its minimum will look like:
1,2,...n;=i ,0~ ][
~ 2
*
2 =−=ii
i
i ERLδ
λδ∂∂ (3.26)
.0~ 1
i2
=−=∑=
o
n
ii VSL δ
∂λ∂ (3.27)
Noting equation (3.26) by analogy with equation (3.21), we receive
1,2,...n.=i ,V~ ~ ES ][
2iii
i*
constRi == λδ
(3.28)
Let's remark, that the conditions (3.28) and (3.21) are identical. Further, receiving as the unit
loading the real loading, from any equation: (3.28) or (3.21); we receive the optimality criterion, which one is a direct writing of the third Z.Wasiutynski theorem [18]:
[ ] 1,2,...n.=i ,constxyixyiyiyixixi =++ εσεσεσ (3.29)
Incidentally we shall mark, that the expression, similar (3.18) for finding of material distribution
ensuring fulfilment the condition (3.29) will looks like:
,
ER
~ *
1 i
*i i
im
ii
oi E
R
S
V⋅=
∑=
δ (3.30)
.R )+(1 22 2xyii
22* µµ +−+= yixiiyixii RRRRR (3.31)
If as unit loading to accept a real loading, the calculation under the formula of a Maxwell - Mohr (3.2) with usage *
iR from (3.31) will give value of deformation energy of a structure. Then the task (3.23) - (3.24) actually represents the task of searching of a structure with minimum energy of deformations made from a given volume of a material. The task (3.11) - (3.12) is adjointed to it: to find

Danilin Alexander. Stiffness Optimization of Airframe. Page 29
a structure with a minimum volume by a given level of deformations energy. In the last case the formula looks like:
,U
ER
*
o
1 i
*i
i
i
m
ii
i ER
S
⋅
=
∑=
δ (3.32)
here U0 - given value of deformations energy. In the formulas (3.30) - (3.32) all structure elements are included, because Mohr integrals here –
are specific energy of deformation of elements – and can’t have negative values. By Ei = const we shall receive from (3.32) formulas identical this one deduced in article wrote
Komarov V.A. [29] and there values *iR is called as an equivalent force flow.
The expression (3.21) actually represents a record of property of an optimum statically
determinate structure by taking into account only stiffness requirement. In an optimum statically determinate structure with given value of generalized displacement,
in zones with positive Mohr integrals the specific energy of internal forces from init loading on deformations from a real loading should be constant in all elements of structure.
This statement can be considered as the theorem for statically determinate optimum structures. In zones with negative Mohr integrals it is necessary to permit structures to be deformed as much
as possible, for what to use in these places materials with low elasticity modulus and large allowable deformations.
3.2.3. Hyperstatic structures
For such structures it is impossible to receive the solution for iδ
~ in the closed form, because the
values ][ *iR depend on distribution of a material. However we can offer an iterative procedure, the
convergence by which one confirms by repeated miscellaneous computing experiments. 1. We divide a structure on small elements, the change of forces within which one can be
neglected. Let's assign arbitrary some distribution of a material ilδ among structure elements. Number of iteration l - at the beginning of process equal zero.
2. In according with the stiffness requirement we apply unit loading in a direction of constrained
displacements, then calculate internal forces in elements ][ *iR , ∆+ and ∆–, but ∆– we shall calculate for
minimum allowable thicknesses iδ . 3. We form limitation (3.11) and in zones with positive Mohr integrals we find with usage Eqn.
(3.18) new thicknesses 1,~
+liδ .

Danilin Alexander. Stiffness Optimization of Airframe. Page 30
4. We calculate initial Vl and obtained Vl+1 volume of material distribution. If
,1 ε≤− +
l
ll
VVV
(3.33)
where ε - small, prescribed value, then the process completes. The otherwise retrieved material distribution is received as initial and we go to point 2.
The computing experiments show, that the given algorithm converges and results into structures,
in which one in zones with positive Mohr integrals is satisfied condition (3.22), which one we shall call as the equal deformation requirement
.
Open there is a problem on assigning minimum permissible thicknesses in zones with negative Mohr integrals. If their values are determined beforehand, for example on design or technological limitations, and do not vary during iterations, the algorithm converges asymptotically and very fast, it is enough for engineering accuracy 5 - 8 iterations.
If the values of minimum permissible thicknesses vary during iterations, for example depending
on the real forces Ri, the algorithm has vibratory and more sluggish convergence, - it is required 8-15 iterations. However in both cases quantity of required iterations practically does not depend on quantity of design variables.
3.2.4. Designing algorithm to satisfy many strength and single stiffness requirement Let structure carry load in several loading cases and in one of them it is required to limit
generalized displacement. Thus in each element in any of loading cases the strength conditions should be fulfilled, which one for thin-walled aviation structures usually represent conditions not exceeding of equivalent stresses over some permissible values:
[ ] 1,2,...d;=j 1,2,...m;=i ;.
ieqij σσ ≤ (3.34)
here j – is number of a loading case.
Huge quantity of articles and second section of the present book is dedicated to optimum designing only on strength conditions however for our algorithm the technique of assigning of thicknesses on strength does not play a principled role and consequently here explicitly is not considered. It is possible to fill up thicknesses definition on strength conditions with any reasonable contents.
In section 3.1.1 for statically determinate structures the task of optimum material distribution
ensuring fulfilment of the stiffness requirement is strictly resolved. This solution is used and in considered further algorithm.
During algorithm working we shall consider as invariable external loadings which are operational
on a structure. For air structures aerodynamic and the inertial forces depend on their elastic and mass characteristics. In the given research we not consider the problems of correlation of external loadings and characteristics of a structure, - we note only, that if necessary to take into account this relation then

Danilin Alexander. Stiffness Optimization of Airframe. Page 31
we can offer a method of recount of loads not on each iteration of searching the rational project, as it is made, for example, for building structures, but after its termination. Then the algorithm for optimization of a structure needs to be started again with the material distribution, obtained in the previous searching, and updated external loadings. For the benefit of convergence of such process speaks existing experience of "manual" designing.
Now we consider algorithm more detail. 1. We divide a structure on small elements, the change of forces within which one can be
neglected. 2. Let's assign arbitrary some distribution of a material ilδ among structure elements. Number of
iteration l - at the beginning of process equal zero. 3. We calculate mode of deformation of a structure in all loading cases. Besides we set to zero
thicknesses iδ~ , required in a stiffness condition.
4. We define elements thickness iδ , required only in strength conditions. 5. In a direction of constrained deformations we apply unit generalized force and calculate ∆+ and
∆– for material distribution iδ . 6. We compare the sum of positive Mohr integrals with (∆0+∆–). If ∆+ ≤ (∆0+∆–), then thickness
ilδ satisfy the stiffness requirement and consequently we go to point 14 with thicknesses iδ , assigned only for strength conditions.
7. If the stiffness requirement is not satisfied, that is: ∆+ > (∆0+∆–), then in zones with positive
Mohr integrals we calculate on Eqn. (3.18) material distribution iδ~ , for fulfilment of a condition ∆+ =
(∆0+∆–), for forces ][ *iR , appropriate ilδ .
8. We compare distribution iδ on strength conditions to distribution iδ
~ on stiffness requirement.
If all ,~ii δδ ≥ i = 1,2... n; then we go to point 14 with thicknesses iδ
~ .
9. If inequalities ,~ii δδ ≥ i = 1,2... n; are executed not everything, we select greatest iδ max
between iδ~ and iδ .
10. We calculate the sum of positive Mohr integrals ∆+
r for such structure by fixed internal forces appropriate to material distribution iδ . Let's note, that this sum will be less (∆0+∆–), as under condition
of ][ *iR = (const)i from (3.8) it is visible, that with increasing of thicknesses the sum of integrals
decreases. Here r - counter of cycle 10 - 13. 11. We compare ∆+
r with (∆0+∆–). If

Danilin Alexander. Stiffness Optimization of Airframe. Page 32
, η≤∆+∆∆−∆+∆
−
+−
o
ro (3.35)
Where η - small prescribed value, the distribution iδ max goes into point 14 for following iteration.
12. If the condition (3.35) is defaulted, then thickness assigned for stiffness, we decrease for
stiffness requirement fulfilment as equality:
.~~,1, ri
o
rri δδ ⋅
∆+∆∆
= −
+
+ (3.36)
13. We select greatest max,1,
~+riδ between 1,
~+riδ and iδ and its is transferred to point 10 by r = r+1.
The sum of positive Mohr integrals ∆+r+1 will be more, than ∆+
r, but less than (∆0+∆–). Repeating evaluations in points 10 - 13 we shall receive a series of structures with the monotonically increasing sum of positive Mohr integrals. Process is convergent, because this sequence is limited above by value (∆0+∆–). By fulfilment the condition (3.35) calculations in cycle 10 - 13 finish. The material distribution max
~irδ now satisfy all acted limitations for forces appropriate to distribution ilδ from the
previous iteration. 14. We take input (into this point) thickness as result: 1, +liδ . Let's calculate a volume of an initial
structure Vl = V( ilδ ) and obtained Vl+1 = V( 1, +liδ ). If
,1 ε≤− +
l
ll
VVV
(3.37)
where ε - small prescribed value, then we go to point 15. Otherwise obtained material distribution 1, +liδ is received as initial and we go to point 3.
15. Exit from algorithm. For statically determinate systems this algorithm results into structures with minimum volume in
one iteration 3 – 14. Really, in each point of a structure either the limiting state by strength conditions (point of the first type) is reached, or the optimality criterion (3.22) for stiffness requirement (point of the second type) is valid. The carrying a material from any point of the first type in any other will cause to a breach of strength conditions, and the carrying from any point of the second type in any other will diminish structure stiffness. Therefore, the structure, retrieved from this algorithm, will have a minimum volume.
In case of hyperstatic structures, when the forces in load-bearing elements depend on material
distribution obtained projects can be non-optimum. The reason for that concludes in assigning technique of thicknesses for strength conditions. The algorithm will realize, for a meeting stiffness requirements, adding material over required on strength conditions in zones with large specific energy of internal forces from unit loading on real constrained deformations. Therefore optimality of a resulted structure depends on a technique of meeting strength requirements. For example, if for their satisfaction to choose searching uniform-strength structure by several loading cases [20], then the examples are known, when the structure with quasi-equal strength is not optimal [26, 42]. At the same

Danilin Alexander. Stiffness Optimization of Airframe. Page 33
time we note, that the additional material for increasing the stiffness is introduced most effectively - in zones with maximum specific energy of internal forces from unit loading on constrained deformations from real loading.
3.2.5 Designing algorithm to satisfy many strength and stiffness requirements The ideas of the reviewed algorithm can be used for more kind of the problems, in particularly,
for the task of structures designing for some loading cases and some stiffness requirements. Let on a structure act d loadings. From them in h loadings cases it is required to limit generalized
displacement, and in each of h cases this displacement can be unique. Besides in each structure element in any of d of loading cases should be fulfilled strength conditions. Thus the structure should have a minimum volume of a load-bearing material.
This task can be solved by mathematical programming methods. In this case designing task will
look like the following. Let's accept as independent design variables the thicknesses of structure elements iδ , i=1,2...m.
Criterion function - volume of a load-bearing material. It is required to find such values iδ , i=1,2...m, which one provide a minimum of criterion function:
;,...,= min, )( 211
iT
m
m
iiSV δδδδδδ ⇒=∑
=
(3.38)
fulfilment geometrical limitations on design variables:
1,2,...m;=i ,0≥iδ (3.39)
limitations on strength in several loading conditions: [ ] 1,2,...d;=j 1,2,...m;=i ;.
ieqij σσ ≤ (3.40)
and also stiffness requirements:
1,2,...h.= t;ott ∆≤∆ (3.41)
It is visible, that the criterion function (3.38) is linear concerning thicknesses of elements and disregarding of conditions (3.40) and (3.41) optimum point is trivial: V(δ) = 0 at δ = 0. However, by striving δ for zero will be break the limitations and, apparently, optimum solution ensuring functionability of a structure will lie on boundary of permissible area of design variables.
The tendered empirical algorithm search the structure that has thicknesses of elements located on
boundaries of permissible area, defined conditions (3.40) or (3.41). Attempt to locate the project satisfying only to the stiffness requirements as right equalities with
the help of reasoning, similar described in section 3.1.1 results to the optimality criterion:
; 1~1
~ ES ][
1 ii
i*
=⋅∑=
h
t i
tit V
Rδ
λ (3.42)

Danilin Alexander. Stiffness Optimization of Airframe. Page 34
and impossibility to receive real expression for thicknesses distribution iδ~ , satisfying to all
stiffness requirements. Therefore we will search for the material distribution, which one without a breach of strength
conditions in all loading cases would ensure, when the stiffness of uniform-strength structure is unsufficient, fulfilment of one of the stiffness requirements as right equality, and remaining as inequalities. That is, at stiffness requirements:
1,2,...h;= t;ott ∆≤∆ (3.43)
it is necessary to find the project, for which one
h;k1 , ≤≤∆=∆ okk (3.44) and
1,2,...h.= tk; t; ≠∆≤∆ ott (3.45) Let's remark, that such formulation very much resembles definition of uniform-strength structure
for several loading cases [19, 20]. We shall work by analogy with the earlier reviewed algorithm. At first we shall describe
necessary computing and logical operations, and then we shall give the explanation for each block. 1. We divide the structure on small elements, the change of forces within which one can be
neglected. 2. Let's assign arbitrary some distribution of a material ilδ among structure elements. Number of
iteration l - at the beginning of process equal zero. 3. We calculate mode of deformation of the structure in all loading cases. 4. We define elements thickness iδ , required only in strength conditions. 5. In according with stiffness requirements in a direction of constrained deformations we apply h
unit generalized force and calculate ∆+t and ∆–
t, t = 1,2...h; with usage Mohr integrals. 6. We compare the sum of positive Mohr integrals with (∆ot+∆–
t). If ∆+t ≤ (∆ot+∆–
t), t=1,2... h; then thickness ilδ satisfy the stiffness requirement and consequently we go to point 15 with thicknesses iδ , assigned only for strength conditions.
7. If inequalities ∆+
t ≤ (∆ot+∆–t), t=1,2... h; are valid not everything, we calculate by Eqn. (3.18)
material distributions itδ~ for the broken stiffness requirements. Thickness distribution itδ~ , where
t=1,2...q; and q ≤ h; we represent as matrix [ ] ~ δ with the size m x q, elements by which one are: in a zone with positive Mohr integrals thickness from (3.18); in a position of a matrixes appropriate to elements, for which one at limitation t (t=1,2... q) an integral of the Mohr is negative, we shall record zero values.

Danilin Alexander. Stiffness Optimization of Airframe. Page 35
From here follows, that the zero line in a matrix [ ]δ~ means, that for this element for all stiffness requirements it is necessary to assign the minimal permissible thickness.
8. We create a scalar matrix [E*], elements by which one are: “ane”, if in i-line [ ]δ~ there is NOT
zero value; “zero” otherwise. Here i=1,2...m. 9. If all E*
ii = 0, i=1,2...m; then emergency exit from algorithm occur, because to satisfy all stiffness requirements in an auto mode is impossible 2
[ ]δ~ ).
10. Conditionally we expand a matrix by adding to it the column of thicknesses calculated
from strength conditions: iδ , i=1,2... m. From each line in such expanded matrix we select maximum thickness:
).,~(max,...2,1
*max iitqti δδδ
== (3.46)
11. In each broken stiffness limitation we calculate the sum positive ∆+
t and negative ∆–t Mohr
integrals for distribution of a material *maxiδ and forces appropriate to distribution δil from the previous
iteration. Let's form two scalar matrices [∆+] and [∆o]:
∆
∆∆
=∆
+
+
+
+
q
.0.
0][
2
1
(3.47)
and
..0
.0
][
1
22
11
∆+∆
∆+∆∆+∆
=∆
−
−
−
oq
o
o
o (3.48)
12. We compare line by line [∆+] with [∆o]. If even for one line the inequality is valid,
∆+t > (∆ot+∆–
t), (3.49)
that is the stiffness requirement number t is broken, then we go to point 14. 13. We check up one more condition. If even for one line of matrices [∆+] and [∆o] the inequality
is valid
, η≤∆+∆∆−∆+∆
−
+−
tot
ttot (3.50)
2) We give more explanation further.

Danilin Alexander. Stiffness Optimization of Airframe. Page 36
where η - small prescribed value, then the current material distribution we transfer in point 15 for following iteration.
14. Thicknesses [ ]δ~ , assigned for stiffness requirements satisfaction, we change as follows:
[ ] [ ] [ ] [ ] [ ][ ] [ ] , ~ ~~ 1*1 EE o
TTrrr −∆∆⋅⋅+= −+
+ δδδ (3.51)
where [E] - unit scalar matrix with size q x q. Then we go to point 10 at r = r+1, where r – the counter of cycle 10 – 14.
15. We take input (into this point) thickness as result: 1, +liδ . Let's calculate a volume of an initial
structure Vl = V( ilδ ) and obtained Vl+1 = V( 1, +liδ ). If
, 1 ε≤−+
l
ll
VVV
(3.52)
where ε - small prescribed value, then we go to point 16. Otherwise obtained material distribution 1, +liδ is received as initial and we go to point 3.
16. Normal exit from algorithm. Let's analyze job of blocks. Maiden four blocks coincide appropriate blocks of algorithm from
section 3.1.4 and have the objective to determine material distribution for strength conditions. Blocks 5 and 6 check the capability of stiffness requirements satisfaction at initial material distribution. Further, we consider more detail possible constitution of a matrix [ ]δ~ . In the common case it looks like:
[ ] ,
~...~~~~..................
~...~~~~0...00000...0~00
~...~0~~~...~~~~
~
4321
554535251
33
2242221
114131211
=
mqmmmm
q
q
q
δδδδδ
δδδδδ
δδδδδδδδδδ
δ (3.53)
Where itδ~ means nonzero value of thickness i-element at stiffness limitation number t. That is, in
a matrix [ ]δ~ there can be line of three types: 1) not containing of zero values; 2) completely consisting from zero values; 3) having zero and nonzero values.
At first we suspect, what the matrix [ ]δ~ consists only of lines of the first type, that is at any limitation ∆t ≤ ∆ot, t=1,2... h; all structure elements are in a zone with positive Mohr integrals. In this case matrix [E*] is the unit scalar matrix. Then selection maximum from value itδ~ in each line of a
matrix [ ]δ~ and acceptance the obtained material distribution as thickness assigned only from stiffness requirements, provide in each element – at forces appropriate δil, - the fulfilment of the equal

Danilin Alexander. Stiffness Optimization of Airframe. Page 37
deformation requirement in any alone stiffness requirement. Let's call it by active for such element. However thus each separate limitation ∆t ≤ ∆ot, t=1,2... h; will be fullfilled as an inequality, except for that improbable situation, when for all elements only one requirement is active and all thicknesses for stiffness exceed thicknesses for strength. In this special case the condition (3.50) is executed at once, at the first pass of cycle 10 – 14, which one, by absence of zero values in matrix [ ]δ~ serves for reduction thicknesses for stiffness with the purpose to achieve fulfilment of one of limitations as equality. The convergence of cycle 10 - 14 is proved in the same way, as well as convergence of cycle 10 – 13 algorithms in section 3.1.4. Let's note still, that in this case condition (3.49) never satisfies. During process in cycle 10 - 14 active limitations for each element either remain invariable, or fades at all due of interference of thicknesses for strength δi, in distribution of a material δ*
i max. In the upshot, the algorithm results to structures, in which one the additional material over strength requirements is included at each stiffness requirement most effectively – in zones with maximum specific energy of internal forces from unit loading on constrained real deformations.
Now we consider the situation, when in a matrix [ ]δ~ are also zero lines. It means, that this
elements are in a zone with negative Mohr integrals at all broken stiffness requirements. Let's call such elements passive. In the block 10 passive elements are assigned minimal permissible thickness for strength and in cycle 10 – 14 these thickness do not vary because appropriate diagonal coefficients in matrix [E*] are set to zero. Generally, matrix [E*] determines what elements it is authorized to change the thickness in cycle 10 - 14. At an evaluation of a matrix [∆o] can occur (if δi > δil), that some stiffness limitations will be upset, as [R*
i]t we consider invariable, but it corresponds to thickness δil, but not δ*
i max. In this case, by actuation of a condition (3.49) in 12 block, transition to thicknesses change - block 14 - for fulfilment of broken limitations at once implements. The matrix equation (3.51) assigns allowed to change thickness as follows:
;~1~~~1, −
+
−
+
+ ∆+∆∆
=
−
∆+∆∆
+=tot
titr
tot
titritrrit δδδδ (3.54)
Where i receives values of numbers of elements, for which one E*ii = 1. The form (3.51) is
necessary for not damage matrix [ ]δ~ during evaluations of thicknesses change in cycle 10 - 14. The expression (3.51) provides:
• Reduction allowed to change elements thicknesses, if ∆+t < (∆ot+∆–
t); • Increase of thicknesses, if ∆+
t > (∆ot+∆–t);
• Invariance of thicknesses at ∆+t = (∆ot+∆–
t).
The condition (3.49) in cycle 10 - 14 can be executed only once, and hereinafter there is reduction thicknesses those elements, which one are in a zone with positive Mohr integrals at all stiffness requirements for fulfilment of one from limitations as equality. The algorithm results in structures, in which one for passive elements the distribution of a material only from strength conditions receives, and in a zone with positive Mohr integrals the additional material, if it is necessary, is included most effectively.
At last, we suppose, that matrix [ ]δ~ contains line of all three types. Let's consider more detail
second line in (3.53). For the second element the Mohr integral is positive in all stiffness limitations except for third. At the third limitation this element should have minimum thickness, whereas at other in this element probably it is required to add a material over necessary for strength. As all stiffness

Danilin Alexander. Stiffness Optimization of Airframe. Page 38
requirements are equivalent, that is no more and less relevant, we need in the second line to select the maximum value for fulfilment active limitation for this element.
In the following analysis we suppose, that thickness for stiffness δ*
i max surpass appropriate thickness for strength δi, that is: .~
max*max ii δδ = This assumption simplifies a phenomenon, not changing
thus of its essence a little. If max2~δ exceeds thickness δ2l, in the block 11 by an evaluation matrix [∆o] the sum ∆–
3 for the third limitation will be less, than that, which one corresponds to thickness δ2l. It cause to disturbance of the third stiffness requirement and actuation of a condition (3.49) in 12 block, as in the formula (3.18) ∆–
2 is evaluated with δ2l, but not with max2~δ . Apparently, that for fulfilment of the third limitation it is
necessary to increase thickness of those elements, in which one at this limitation the Mohr integrals are positive. That is to increase nonzero coefficients in the third column in matrix [ ]δ~ from (3.53). However by the close analysis (3.53) we can see, that the increase 33
~δ entails growth max3~δ . It results
to disturbance everything limitations, except the third limitation, so to necessity increasing thicknesses for appropriate columns and, in particular thicknesses q2242221
~...~~~ δδδδ . The called foregone increase
max2~δ again requires increase 33
~δ . The process is divergent and we can’t achieve fulfilment broken limitations.
Therefore it is necessary to increase thickness only those elements, for which one the Mohr integrals are positive at ALL stiffness limitations. Such elements are determined by a matrix [E*]. For them the appropriate value on a diagonal is set to “one”. If in a structure there are no such elements, the attempt to find material distribution which one fulfill stiffness requirement will fail. From here – we analyse (in the block 9) contents of diagonal of matrix [E*] and capability of algorithm abort. By the way, the diagonal will be zero in that case, when all structure elements are passive, but then will work conditions in the block 6 and the block 9 will be bypassed. As well as in the previous case, the condition (3.49) in cycle 10 – 14 can be executed only once and the further activity is similar described earlier. The algorithm results in structures, in which one the attempt is made at each stiffness requirement to arrange a material most effectively, but the stiffness requirements will be badly agreeed with actual loads and are opposed one to another.
The offered algorithm, except for the described task, can be easily utilised for problem solving of
designing with simultaneous taking into account strength requirements and stiffness requirements of following kinds.
1. Several limitations on displacements in one loading case. Here for an evaluation itδ~ it is
necessary to set some unit loadings in according with constrained displacements and one real loading case.
2. Several limitations on displacements in each of several loading cases. For both kinds of the tasks h from (3.41) equals to quantity of generalized unit loadings.
3.2.6. Theory Applications
Our procedure, implemented by a PC software package known as DRACO developed by
Professor Alexander I. Danilin, provides the ability to perform high-level trades early in the design

Danilin Alexander. Stiffness Optimization of Airframe. Page 39
Fig. 3.6 - Chordwise curvature and twist for example low aspect ratio wing; subsonic and supersonic flight
process. This approach also places structural topology with aeroelastic considerations on an equal, multi-disciplinary level with the usual aerodynamic and performance considerations that drive conceptual design. The results of this process can then be given to high fidelity analysis packages such as NASTRAN or ASTROS for further refinement at the detailed design level should the design actually progress that far. The result will be a higher fidelity, higher quality effort capable of identifying structural and weight problems early, while providing reliable design information.
3.2.6.1. Identification of aeroelastic characteristic (typical) sections
An aeroelastic stiffness requirement such as lift effectiveness can be posed, approximately, as a
limitation on deformation. To use optimality criteria, these constraints enter as inequalities and, in the case of wings, the measure of design stiffness is taken as an elastic displacement at a finite number of selected, “characteristic” or “typical” cross-sections. The deformations of these so-called cross-sections and their aerodynamic properties are representative of the elastic twist angle )(zθ and the chordwise change of curvature (camber) of the structure )(zf∆ along the wing (the coordinate z is the nondimensional distance from the lifting surface root and the typical section). From design experience it is known that θ and f∆ contribute approximately the same effects when
θ≅∆f 2 (3.55) For large aspect ratio wings with sections having thickness-to-chord ratios between 10% and
12%, the change in camber curvature is insignificant compared to the elastic twist, and the condition given in Eqn. 3.55 is not found at any spanwise cross-section.
For low aspect ratio wings with thickness-to-chord ratios between 3% and 5%, relatively large chordwise deformation occurs so that is possible to have a ratio like that shown in Eqn. 3.55 on some section. In Fig. 3.6 the curves
)(zθ and )(zf∆ for a supersonic passenger airplane wing with an ogival planform with thickness ratio 5% are shown. It is seen that elastic twist dominates the airloads at z > 0.5.
Theodorsen intuitively described
these circumstances; he considered only torsional deformations of a characteristic section at the 1/2 spanwise position. However, he does not substantiate this conclusion or give the guidelines used to select his typical section. Other researchers recommend a characteristic cross-section located at a different z location. Most recommend selecting a characteristic cross-section in the range z =0.7 to 0.9.
References, which substantiate the principles used to select a characteristic cross-section, are not known to us. Therefore we conducted a study to identify how to select such a section.
First we consider a high-aspect wing. In Fig. 3.7 the computational model of a wing with aspect ratio λ= 7.5 is shown; only the load-carrying part of a design is included. Structural distribution and

Danilin Alexander. Stiffness Optimization of Airframe. Page 40
the geometrical characteristics of model correspond to the wing of the Tupolev 154 aircraft. Let's determine the torsional deformations of cross-sections for three loading conditions:
1 - loading by tip section ailerons 2 - loading by an inboard flap 3 - a case with a forward center of pressure Because the relative twist, not the absolute value of the twist, is important, we will examine two
normalized relationships:
( ) ( )( )1 z
1 θθθ =z (3.56)
( ) ( )
( )∫= 1
0
2
zd z
z
θ
θθ z (3.57)
Consider Fig. 3.8 in which we have plotted these two relationships. It is difficult to draw practical conclusions from a plot of )(1 zθ , but the curves )(2 zθ show an interesting feature. The three curves intersect very close to each other at z = 0.75.
Fig. 3.7. Tu-154 structural finite element model
Fig. 3.8. Twist deflection results for: o – flap loading; ∆- forward center of pressure; -
aileron loading.
We notice that for all loading conditions we have
( ) .zd )z(
(0.75) 0.75 1
0
2 const≅=
∫θθθ (3.58)
From this it follows that the twist at z =0.75 is

Danilin Alexander. Stiffness Optimization of Airframe. Page 41
Fig 3.11. Vertical tail example
.zd )z( const (0.75) 1
0∫≅ θθ (3.59)
This cross-section location is in the range z first mentioned by Theodorsen as his selection for the characteristic section.
Let's try this approach for a low aspect ratio wing whose finite element structural model is shown in Fig. 3.9. The results are shown in Fig. 3.10 and demonstrate, that here too it is possible to find a characteristic section, in this case at z = 0.83.
As a result of this study, we offer the following simple technique to find the typical section to be used for optimization studies. A “typical” wing is analyzed for several loading conditions. The curves
)(2 zθ , as defined in Eqn. 3.57, are constructed and the approximate point of their intersection determines the position of the characteristic section.
Fig. 3.9. Structural finite element model
Fig. 3.10. Normalized twist for several loading conditions applied to a low aspect ratio wing.
3.2.6.2. Example - vertical tail design with strength and stiffness constraints Consider the task of designing of a vertical tail
structure with yaw loading, but with the constraint that it be lift effective. The assumed distribution of this aerodynamic loading is assumed to be uniform with an its intensity that depends on flight speed and yaw angle. The tail is sweptback so that bending deformation causes negative streamwise angle of attack reduces the effectiveness of the vertical tail to produce a restoring moment when the tail is displaced sideways (see Fig.3.11). Our optimization problem includes a requirement for strength and a constraint on stiffness so that the tail remains effective. This latter constraint is an aeroelastic constraint.

Danilin Alexander. Stiffness Optimization of Airframe. Page 42
Our aeroelastic constraint, rather than
directly addressing aeroelastic effects all along the entire tail surface, will instead require that there be a non-negative angle of twist of a characteristic section located at distance 87.5% of the distance from the root to the tail tip. Thus, the stiffness constraint requires that twist of vertical tail under its aerodynamic loading should be opposite to its “natural” deformation.
Our example is a 3-spar vertical tail
structure whose geometrical finite element grid is shown in a Fig. 3.12. Ribs are located along the streamwise direction with uniform spacing; the thickness to chord ratio of the structure is 16 %. Using the software package DRACO we optimized the vertical tail structure.
Our initial structural arrangement has
uniform distributions of material in elements within each of five structural element groups. The initial skin element thickness is 1 mm; spar web thicknesses are 2 mm; rib webs and leading edge webs are 1 mm; cross sectional areas of rib caps are 100 mm2; spar caps are 1000 mm2. The lower limits for the element cross-section areas and thicknesses are equal to 0.1 % of the initial values.
Fig. 3.12. Vertical tail finite element model.
Spars are indicated as A, B, C.
The load is a uniform pressure pz = 1200 N/m2. The allowable stress is identical for all elements
and equal to 100 N/mm2; the modulus of elasticity of the structural material is 7.2 x104 N/mm2. The generalized displacement constraint is 0=∆o . The streamwise twist at the position =z 0.875 from the root of the vertical tail.
If we take into account take only strength and minimum gage constraints then, after three design
iterations, the distribution of a material shown in Fig. 3.13 is found. The characteristic section has a streamwise twist angle, o∆ = -41.15x10-4 radians; the volume of structural material is V = 0.868421x106 mm3.
When we include both the strength condition and the stiffness requirement, after four iterations
the distribution of material shown in Fig. 3.14 is found. The streamwise twist angle of the characteristic section is o∆ = +4.44x10-4 radians. This angle is not quite zero, but it is slightly positive and helps, rather than decreases, effectiveness. The distribution satisfies all imposed strength constraints and has

Danilin Alexander. Stiffness Optimization of Airframe. Page 43
volume VS = 0.876285x106 mm3. This is only 0.9 % heavier than the design with only a strength constraint.
Fig. 3.13. Final values found from
optimization with only a strength constraint – unspecified parameter values mean that the parameter value has gone to the minimum value.
Figure 3.14. Final parameter values found
from optimization with strength and stiffness constraints; parameter values with minimum gage are not shown on the figure.
Conclusion This example will illustrate how optimality criteria, couple with effective finite element analysis
can bring valuable information to the initial structural design effort. This information allows the design team the opportunity to review and debate design decisions made by configuration specialists early so that good decisions are made. Using this technique, it is no longer necessary to wait to consider requirements such as aeroelasticity or other stiffness related performance constraints.
3.3. Restrictions in the form of equalities on elastic deformations
3.3.1. Conditions of providing of the given deformations
Let's discuss the following formulation of a design problem. To find such distribution of a
material on a structure δ(x, y, z) which without infringement of strength conditions provides the given elastic displacement ∆k = ∆ok, k=1,2... t; in several points of a design by applied loading.
Here restrictions on stiffness are set in the form of strict equalities, and the given displacement for each k-th point of a design have own value. Obviously, the algorithm of the previous section for the decision of the given problem is inapplicable. Moreover, we do not put here an optimizing problem, as not in all cases the given problem essentially has the solution within the limits of traditional job of aviation structures. For example, it is impossible to satisfy directly to the requirement of stiffness shown on Fig. 3.15.

Danilin Alexander. Stiffness Optimization of Airframe. Page 44
Fig. 3.15
Let's assume, that the structure works within elasticity. We will construct it finite element
model with n freedom degrees, and such, that points in which preset values of displacements, coincide with grid nodes. Then the set displacements ∆k = ∆ok, k=1,2... t; it is possible to present in the form of a vector-column ∆o in the size N, where N<t. If displacements ∆ok are givet in co-ordinates system of model then N = t, otherwise recalculation is necessary and N> t, Fig. 3.16 see.
By applied loadings P from the balance equations of finite element model
[K] U = P (3.60)
we define a vector of node displacements U. This vector should to meet stiffness requirements, in turn,
[C] U = ∆o, (3.61)
where [C] - a matrix consisting of zero and ane, the size N x n, and providing separation ∆ok from a column U. In other hand, it is possible to "put" to a design the given displacements ∆o and to find a vector of displacements which should satisfy to the equations of balance (3.59).
Fig. 3.16.
Lemma. Let U, εi, σi, F i - accordingly node displacements of model, deformation of
i-th elements i=1,2... m, stresses and forces in them satisfying only to the equations of elastic balance of type (3.60). Let U*, ε*i, σ*i, F*i - node displacements, element deformations, stresses and forces meeting only requirements of stiffness of type (3.60) in elastic area. Then performance at least

Danilin Alexander. Stiffness Optimization of Airframe. Page 45
one of conditions:
U = U*, (3.62) or εi = ε*i, i=1,2... m; (3.63) or σi = σ*i, i=1,2... m; (3.64) or Fi = F*i, i=1,2... m; (3.65)
involves performance of all of the others, that is, if at least one of conditions (3.61) - (3.64) is satisfied, then the stress and strain state, satisfying to the balance equations, simultaneously satisfies also to stiffness requirements.
The proof:
In linearly-elastic area at the given geometry and stiffness characteristics of elements of a structure there is a biunique communication between displacements, deformations of elements, stresses and force inside them so equalities (3.62) - (3.65) are interdeducible. Then it is easy to show, that at equality, for example, node displacements (3.62) cannot exist two various stress and strain states of the same elements, no less than on the contrary. That under the loading P stiffness requirements ∆k = ∆ok, k=1,2... t; were satisfied the vector of displacements U in (3.60) and (3.61) should be the same. Then taking into account a lemma for each element of a structure conditions (3.63) - (3.65) should be satisfied. Equality (3.63) generates one more condition, namely:
ei = σTi εi = σT
i ε* i = e*i; (3.66)
That is, in a required design specific energy of deformations of any i-th element should be
equaled to specific job of stresses in this element on the deformations meeting requirements of stiffness.
The parity (3.66) together with (3.65) gives the recurrent formula for recalculation of stiffness elements on purpose to provide performance of conditions (3.67):
; e i*
i1+, l
l
ll δδ i
ie
= (3.67)
where l - number of iteration of recalculation. Node displacements U, necessary for calculation ei are defined directly from the equations of elastic balance (3.60). To calculate e*
i it is necessary to "load" a structure with the given displacements, that in a method of finite elements it is carried out simply enough [43, 44]. Really, multiplying a diagonal of a matrix of stiffness [K], increased, for example in 108 times, on expanded to n unknown persons a column of the given displacements ∆o, we will calculate a column of fictitious loadings P* and from the system decision
[K] U* = P * (3.68) we receive a demanded vector of displacements U* on which we will define e*
i, i=1,2... m. Strictly speaking, performance of a condition (3.66) is not a guarantee of simultaneous
performance of the equations of balance and stiffness requirements, however if they are carried out, parities (3.66) are competent. Therefore in heuristic algorithm of search of distribution of the material providing performance of restrictions on displacements as strict equalities considered further, we will use the formula (3.67) following from (3.66).
3.3.2. Algorithm of designing
The offered algorithm urged to solve the following problem of designing. To find material

Danilin Alexander. Stiffness Optimization of Airframe. Page 46
distribution δi, i=1,2... m; on elements of a structure, which by the given stationary loadings Pj, j=1,2... d; provides:
- Structural strength of a structure in d loadings; - Performance of stiffness requirements in the form of the given displacements in t points in one
of settlement loadings Pj, j=1,2... d:
∆jk = ∆j
ok, k=1,2... t; 1<j <d; (3.69)
- Performance of is constructive-technological restrictions on thickness of elements 1,2,...m.=i ,maxmin
iii δδδ ≤≤ (3.70)
The decision of the given problem we will execute under the following plan. 1. We will separate a structure into small enough elements, change of force flow in which can
be neglected. 2. We will define thickness of elements δi, i=1,2... m; providing performance of conditions of
structural strength in d loadings. 3. For material distribution δi, i=1,2... m; from previous point we will calculate U, σi εi, ,
i=1,2... m; in that loadings in which requirements of stiffness (3.68) are set. 4. We will check up performance of requirements of stiffness (3.68). If they are carried out, that
is 1,2,...t;=k ,
kη≤∆−∆∀ okk (3.71)
Where η - small, beforehand set size we pass to point 8. 5. Requirements of stiffness (3.69) are not carried out, therefore we "will load" a design with
the given displacements ∆ok, k=1,2... t; also we will calculate a vector U* on which we will calculate ε*i, i=1,2... m.
6. We will define on (3.67) new values of thickness of elements δi, r+1, where r - number of iteration in cycle 3-7.
7. We will check up geometrical restrictions (3.70). If for some elements they are not carried out, we will appoint for them a thickness from admissible area. Further we pass to point 3 with the received distribution of a material δi, r+1, i=1,2... m.
8. The exit on the given point means, that the distribution of a material providing performance of requirements of stiffness (3.69) as equalities with accuracy η is found. Now we will check up structural strength conditions in j=1,2... d loadings and by their performance the algorithm finishes his job. Otherwise we go to point 2.
The offered algorithm is empirical and does not guarantee convergence as by the given loadings
and constructive scheme not always it is possible to meet stiffness requirements. Therefore by program realization of algorithm intervention of the designer for operative change of the constructive scheme of a structure or conditions of its job should be provided at bad convergence of process which reliably enough can be estimated already after 3-4 iterations. But if the algorithm converges, speed of convergence practically does not depend on dimension of a problem and degree of static indefinability.
Very interesting application this method, allowed to solve optimization task “without
optimization” we will discuss in the next book.
3.4. Dynamic stiffness requirements.

Danilin Alexander. Stiffness Optimization of Airframe. Page 47
3.4.1. Structure such as beams and frames. 3.4.1.1. Optimality Criterion.
Let's consider the task of searching of a structure with minimum volume having given value of
any natural frequency. A deduction of the optimality criterion we provide at following assumptions. 1. The mode of structures deformation is defined enough exactly by the beam theory. This
assumption is valid for wings structures with large and middle aspect ratio, and also for lengthy thin fuselages.
2. The structure bears on itself big, as contrasted to own, passive weights (freights, fuel, not
load-carrying structural elements etc.), therefore change of material distribution in a load-carrying part of a structure influences on common weight distribution a little.
The authority of the given assumption confirms by gravimetric analysis of modern structures, - weight of a structural torsion box of wings, accountable for stiffness creation, constitute about 10 - 15 % from total wing weight. For fuselages this part is a little bit above and reaches up to 18 - 22 %.
3. On a deduction phase of optimality criterion we suppose, that the form functions of natural
oscillations do not depend on elastic distribution. This relation we shall take into account later, at creation of iterative designing algorithm.
Let's consider at first bending vibration modes. With allowance for of made assumptions a
natural frequency ω, expressed through a ratio of the Lord J. Rayleigh,
∫
∫
= L
L
zzm
dzzfdzB
0
2
2
02
2
2
dz )(f )(
dz )( )(ω (3.74)
will be a function of bending stiffness B(z) for a equivalent beam and form of its natural oscillations f(z), and f(z) and B(z) do not depend from each other. Here m(z) - fixed per unit length weight distribution, L - length of a beam.
As criterion function we accept the functional
∫=L
zBF0
dz. )( (3.75)
In the class of rational cross sections of thin-wall structures, in which one the bending moment is carried by a material as much as possible placed from a neutral axis and which one have invariable during optimization structural depth, the criterion function (3.75) accurate within a constant determines a volume of a structure. Thus we have the variational task:
To minimize a functional
min, dz )(0
⇒= ∫L
zBF (3.76)
by isoperimetric condition
ω2 = ω20, (3.77)

Danilin Alexander. Stiffness Optimization of Airframe. Page 48
where ω0 - given frequency of any bending form of natural oscillations.
The extended functional with taking into account conditions (3.77) looks like
( ), dz )( 20
21
0
ωωλ −+=Φ ∫L
zB (3.78)
Where λ1 - Lagrangian multiplicity. A necessary condition of functional (3.78) stationarity is the equality to zero of its total variation, that is δФ = 0, that gives:
[ ].0dz f(z) f(z) )(2
dz )(f )(
(z)f )(
dz )(f )(
dz (z)f )(
+dz )(
02
0
2
0
2
0
2
0
2
1
0
=
⋅
′′
−
′′
+
=Φ
∫∫
∫
∫
∫
∫
L
L
L
L
L
L
zm
zzm
dzzB
zzm
zB
zB
δδ
λ
δδ
(3.79)
Hereinafter accent indicates derivative with respect to z. With usage of an integration by parts and taking into accountl, that δ(y') = (δy)', we calculate a variation
[ ] [ ]∫ ∫∫ =′′′′+′′′′L L
zBzB0 0
L
0
22 dz (z)f (z)f )(2dz B(z) (z)f=dz (z)f )( δδδ
[ ] [ ] =′′′′−′′′+′′= ∫∫LL
zfzBzBzf00
2 dz )((z)f )(20
L (z)f (z)f )(2dz B(z) )( δδδ
+′′′−′′′+′′= ∫0
Lf(z) ](z)f )([2
0
L(z)f (z)f )(2dz B(z) )(
0
2 δδδ zBzBzfL
.dz f(z) ](z)f [B(z)2 L
0∫ ′′′+ δ (3.80)
Substituting (3.80) in (3.79) and with taking into account Rayleigh ratio (3.74) we receive
∫∫∫
×
′′+=Φ
L
L
zzzm
zf
0L
0
2
1
0
2
2
Б1
dz )(f m(z)
2+dz B(z) dz )(f )(
)(1 λδλδ
−′′′−
−″′′× ∫
0
L(z)f (z)f )(f(z) f(z) m(z) (z)f )(
0
2 δδω zBzBL

Danilin Alexander. Stiffness Optimization of Airframe. Page 49
[ ] .0 0
Lf(z) (z)f )( =
′′′− δzB (3.81)
As the variations δB(z) and δf(z) are mutually independent, following the basic lemma of a calculus of variations [45] we receive optimality criterion
;1
dz )(f )(
)(
1
0
2
2
λ−=
′′
∫L
zzm
zf (3.82)
and differential equation of bending natural oscillations
[ ] 0 = f(z) m(z) (z)f )( 2ω−″′′zB (3.83) with boundary conditions
0; = 0
L (z)f (z)f )( ′′′ δzB (3.84)
0. = 0
L f(z) ](z)f )([ δ′′′zB (3.85)
It is impossible to get the solution of a system (3.81)... (3.85) in the closed form, therefore we select some properties, which allow create designing algorithm for beam systems.
From a boundary problem (3.83)...(3.85) forms f(z) are determined within a constant
coefficient, therefore by an appropriate normalization it is possible to achieve, that
∫L
zzm0
2 1 = dz )(f )( (3.86)
at all variations B (z). Then the optimality criterion (3.82) will accept a view:
.1)(1
2 constzf =−=′′λ
(3.87)
Following [22] on the basis of criterion (3.87) it is possible to receive a recursion formula for assignment of new bending stiffness B(z), ensuring fulfilment of the given requirement. Let's multiply
left and right member (3.87) on )z(Bs and after elementary conversions we receive
, (z)f )( )( 211l
slzBkzB ′′=+ (3.88)
where k1 - some constant coefficient, l – iteration number, and s determines the size of a step.
The second derivative of beam sagging is a curvature of a bending neutral axis. From here it is visible, that the new bending stiffnesses need to be assigned proportionally to curvature of the form of bending oscillations, and by made assumptions the structure with stiffness distribution ensuring constant curvature will be optimum.
Let's consider now torsional forms of natural oscillations. The extended functional for the
taking into account the isoperimetric condition (3.77) will be written as

Danilin Alexander. Stiffness Optimization of Airframe. Page 50
,dz (z) )(
dz (z) )(dz )( 2
0
0
2
0
2
20
−
′
+=Φ
∫
∫∫ ω
ϕ
ϕλ L
L
L
zi
zCzC (3.89)
where C(z) - torsional stiffness, ϕ(z) - form of natural torsional vibrations, i(z) - per unit length polar moment of inertia of structural weights concerning centers of torsion. For thin-wall beams which are carrying torsional stresses on Bredt [7, 46, 47] criterion functions (3.89) to within a constant are determined by a volume of a structure material. Evaluating a variation δФ, we receive a condition of a functional (3.89) stationarity:
×
′+=Φ
∫∫
∫L
L
L
zizi0
2
2
0
0
2
22
dz (z) )(
2+ dz C(z) dz (z) )(
(z) 1ϕ
λδϕ
ϕλδ
;0dz (z) )()()()(0
L(z) (z) )(
0
2 =
+′′−′× ∫
L
zzizzCzC δϕϕωϕδϕϕ (3.90)
from which due independence of variations δÑ(z) and δϕ(z) and in according with the basic lemma of calculus of variations the optimality criterion is
;1
dz (z) )(
)(
2
0
2
2const
zi
zL =−=
′
∫λ
ϕ
ϕ (3.91)
and differential equation of torsional natural oscillations
[ ] 0,=(z) i(z) (z) )( 2 ϕωϕ +″′zC (3.92) with a boundary condition
.00
L (z) (z) )( =′ δϕϕzC (3.93)
The analysis of properties of a system (3.91)...(3.93), similar earlier conducted, allows to receive a final kind of optimality criterion (3.18)
,1)(2
2 constz =−=′λ
ϕ (3.94)
And formula for assignment of torsional stiffness , (z) )(C )( 2
21ls
lzkzC ϕ′=+ (3.95) Where k2 - some constant coefficient, and s, as well as in (3.88), determines the size of a step.
The equations (3.88) and (3.95) can be extended. Really, according to the technical theory of a beam [46, 47] bending and torsion moments are accordingly

Danilin Alexander. Stiffness Optimization of Airframe. Page 51
; )( 2
2
dzydzBMЏbend = (3.96)
;dzd )( θzCMtors = (3.97)
where y(z) - sag, and θ - angle of elastic twisting.
Comparing (3.88), (3.95) with (3.96), (3.97) we can see, that new stiffness, bending or torsional, it is necessary to assign proportionally to moment bending or torsion, scaled on strained state appropriate to this or that form of natural oscillations.
. M(z) )( 2
l1s
l kzA =+ (3.98) here A(z) - bending or torsional stiffness of a structure, M(z) - moment from deformation under any form of natural oscillations.
3.4.1.2. Algorithm for designing beams and frames.
It is impossible to create definite algorithm of designing on the basis of deduced optimality criteria, because there is a problem of definition of values k1 and k2, connected with Lagrangian multiplicities in the formulas (3.88) and (3.95), and also a method of stiffness assignment at several natural frequencies limitations is unknown. The tendered further algorithm is empirical, is based on experience and intuition of the author and does not claim for uniqueness.
The basic ideas of algorithm are those. At first, if there is several natural frequencies
limitations, then the total stiffness distribution on each iteration is assigned as an envelope of required stiffness for each limitation. Secondly, the coefficients in the formulas (3.88) and (3.95) are assigned so, that each frequency limitation was executed as right equality, that is
1,2,...q;=j ,12
2
=tj
toj
ωω
(3.99)
where t – is number of a natural frequency, and j – is number of frequency limitation. This idea was offered in [48, 49] for definition of Lagrangian multiplicities at the solution of the task with limitations on elastic displacements. We use it here on other assignment. In according with [48] we multiply the
left and right parts (3.99) on b1k or b
2k , extract the degree b radical and write as:
;2
,2,1
,12,1
b
tj
tojljl kk
=+
ωω (3.100)
Here b - determines a step of coefficients change.
The following order of designing is offered. 1. We divide a structure on small elements, the change of forces within which one can be
neglected. Let's assign arbitrary some distribution of a material ail among structure elements. Number of iteration l - at the beginning of process equal zero. Let's calculate a volume of such structure Vl.

Danilin Alexander. Stiffness Optimization of Airframe. Page 52
2. We calculate mode of deformation of a structure in all loading cases and define elements stiffness ai, i=1,2... n, required only in strength conditions.
3. We calculate natural frequencies and forms of oscillations for such structure with material
distribution ai, i=1,2... n. 4. With usage (3.100) we calculate coefficient k1 or k2 for (3.88) or (3.95) for assignment of
new stiffnesses for natural frequencies limitations. At l = 0 it is necessary to accept ,1,
2,1 =jlk j=1,2... d.
5. For all frequencies limitations by (3.88) or (3.95) we calculate stiffnesses distribution ija~ ,
i=1,2...n; j=1,2...d; provided fulfilment of each natural frequency limitation as right equality. 6. We define the total material distribution for following iteration as
),~,(max,...2,1
1, ijidj
li aaa=
+ = (3.101)
where ai - stiffness assigned on strength conditions.
7. We shall calculate a volume Vl+1 of the retrieved material distribution. If Vl+1 > Vl, then step parameter s from (3.88) and (3.95) is too big and it decreases twice for following iteration: s = s/2. Otherwise s remains invariable.
8. We shall check up two conditions. If
;1l
1ll ε≤− +
VVV (3.102)
or ;2ε≤s (3.103) where ε1, ε2 - small prescribed values, then the algorithm is over. Otherwise material distribution ai,l+1 goes into block 2 for following iteration at Vl = Vl+1 and l = l + 1.
Let's note still, that parameter b for step change at coefficients evaluation k1,2 in (3.100) should be picked up by practical consideration for each task. At b = 2 we receive intuitively suspected step value.
3.4.1.3. Test example. Swept wing optimization Let's consider designing algorithm behavior in an example of a swept three-spar wing with
aspect ratio λ = 4.2. Evaluations of the natural forms and frequencies we shall do by the finite element method with the help of a package DRACO (see. The appendix). The finite element model of its torsion box structure is displayed in a fig. 3.27. Let's simulate a skin by shift finite elements, spars and ribs - by elements as "flange beam" [50 ], and the ribs boom area are 15 mm2, and the spars boom - 500 mm2. Walls thickness for spars is 3 mm, walls thickness for ribs - 0.6 mm, skin thickness - 0.6 mm. Let's simulate stringers by rod elements with cross-sectional area, equal 100 mm2. The wing semispan is 5 m, root and tip chord of a torsion box are accordingly 2m and 1m. The sweep angle along center

Danilin Alexander. Stiffness Optimization of Airframe. Page 53
spar is 250. The thickness ratio of a profile is constant and concerning chords of a torsion box equal 22.5%, that there corresponds to thickness ratio 15% for a full airfoil profile.
Weight of a load-carrying material of a torsion box structure by its such geometrical and
stiffness characteristics is equal 139 kg at material density 2780 kg[m3. Besides on a torsion box we arrange proportionally to chords passive weights so that total wing weight was equal 1059 kg, that is relative weight of a force torsion box is 13%.
Fig. 3.27
At such input datas the structure has natural frequencies, introduced in the table 3.4. The
vibration modes appropriate to the first, second and third natural frequency, are displayed in a fig. 3.28.
Table 3.4. Natural frequencies of an initial structure [rad/sec].
1 2 3 4 5 6 3.90 10.10 16.80 25.99 35.64 38.08
With the help of algorithm from section 3.4.1.2 we shall reallocate a material of an initial
structure to increase frequency of the first form of natural oscillations, which one is bending, see fig. 3.28. And coefficient k in the formula (3.98) we shall select for each iteration so that the load-carrying material volume on current iteration was equal material volume of initial structure. To we shall vary only spar boom areas, because this elements are responsible for creation of bending stiffness. The lower limit for the areas of cross-sections we shall accept equal 1mm2. A condition of strength we shall not impose.
The algorithm has converged with accuracy 0.03 for two iterations. The retrieved material distribution is displayed in a fig. 3.29. It provides increase of the first natural frequency on 12.6% without increase of a structural weight, only by reallocation of a material.

Danilin Alexander. Stiffness Optimization of Airframe. Page 54
Fig. 3.28

Danilin Alexander. Stiffness Optimization of Airframe. Page 55
Fig. 3.29
Fig. 3.30
The diagram of change of the maiden six natural frequencies at different quantities of additional
material arranged proportionally distribution displayed in fig. 3.29, is shown in fig. 3.30.

Danilin Alexander. Stiffness Optimization of Airframe. Page 56
Fig. 3.31

Danilin Alexander. Stiffness Optimization of Airframe. Page 57
The vibration modes for a torsion box with increased on 39.2 % first natural frequiency are shown in a fig. 3.31(point "A" in a fig. 3.30). It must be note also, that the scale in fig. 3.28 and fig. 3.31 is identical.
Analyzing obtained results, it is possible to make the conclusion about functionability of
tendered algorithm and accordingly deduced optimality criterion.
3.4.2 Structure such as plates For the description of bending systems, such as wing panels with small curvature, wings with
small aspect ratio, aggregates and the parts of cars bodies etc. the models on the basis of a plate theory are most common [46, 51]. Therefore we deduce optimality criterion for isotropic and orthotropic plates with the same assumptions, as in section 3.4.1 except for the first. As the maiden assumption we shall accept, that the deformation mode of a structure can be defined by the theory of thin plates.
3.4.2.1 Isotropic plates
As a criterion function we shall accept the functional ∫∫
Ω
= dy.dx ),( yxDG (3.104)
Hereinafter: D(x, y) - bending stiffness; Ω - plane area of a plate. The minimization of such criterion function in general does not provide a minimum of a
structure material volume, however for sandwich plates with variable, but not varied during optimization structural depth, and with filler absolutely rigid for shift deformation, the structural weight is determined by thickness of carrying layers, so both the minimum of a function (3.104) and volume of a material coincide.
At made assumptions the free-running frequency w, expressed through a ratio of the Rayleigh,
will be written as [157]:
( ).
dydx
dy y
12
2
22
2
2
2
22
2
2
2
2
2
∫∫
∫∫
Ω
Ω
−⋅−−
+
=w
dxx
wyw
xw
yw
xwD
ρ
∂∂∂
∂∂
∂∂µ
∂∂
∂∂
ω (3.105)
The frequency ω depends on stiffness distribution D(x,y) and on a vibration mode w(x,y). Here ρ(x,y) - fixed weight distribution.
In the total we have the following task of optimum designing. To find such stiffness distribution
D(x,y), which one delivers a minimum to a functional ∫∫
Ω
⇒= mindydx ),( yxDG (3.106)
by isoperimetric limitation ,022
0 =−ωω (3.107)

Danilin Alexander. Stiffness Optimization of Airframe. Page 58
where ω0 – is given natural frequency.
Let's solve the task by a method of Lagrangian multiplicities. Let's record the extended functional as
( ),dydx ),( 22
0 ωωλ −+= ∫∫Ω
yxDL (3.108)
where λ - is Lagrangian multiplicity.
Necessary condition of a stationarity of the functional (3.108) is the equality to zero its total variation, that is
dL = 0, (3.109)
that gives (∫∫
Ω
−= 20+dydx ),( δωλδδ yxDL
( ).0
dydx
dy y
12
2
22
2
2
2
22
2
2
2
2
=
−⋅−−
+
−∫∫
∫∫
Ω
Ω
w
dxx
wyw
xw
yw
xwD
ρ
∂∂∂
∂∂
∂∂µ
∂∂
∂∂δ
(3.110)
With using the Green formula, we calculate a variation
∫∫∫∫∫ΓΩΩ
−+
=
dsxN
xw
xwDdxdyD
xwdxdy
xwD ),cos(2 2
22
2
22
2
2
∂∂δ
∂∂δ
∂∂
∂∂δ
∫ ∫∫Γ Ω
−
− , ),cos(2 2
2
2
2
2
2dydxw
xwD
xdsxNw
xwD
xδ
∂∂
∂∂δ
∂∂
∂∂ (3.111)
Where Γ - contour of a plate, (N,x) - angle between a normal to a contour and axis x. The remaining variations are determined similarly:
∫∫∫∫∫ΓΩΩ
−+
=
dsyN
yw
ywDdxdyD
ywdxdy
ywD ),cos(2 2
22
2
22
2
2
∂∂δ
∂∂δ
∂∂
∂∂δ
∫ ∫∫Γ Ω
−
− ; ),cos(2 2
2
2
2
2
2dydxw
ywD
ydsyNw
ywD
yδ
∂∂
∂∂δ
∂∂
∂∂ (3.112)
∫∫∫∫∫ΓΩΩ
−+
⋅=⋅ dsyN
yw
xwDdxdyD
yw
xwdxdy
yw
xwD ),cos(2 2
2
2
2
2
2
2
2
2
2
∂∂δ
∂∂δ
∂∂
∂∂
∂∂
∂∂δ
∫ ∫∫Γ Ω
=
−
− , ),cos(2 2
2
2
2
2
2dydxw
xwD
ydsyNw
xwD
yδ
∂∂
∂∂δ
∂∂
∂∂

Danilin Alexander. Stiffness Optimization of Airframe. Page 59
∫∫∫ΓΩ
−+
⋅= dsxN
xw
ywDdxdyD
yw
xw ),cos(2 2
2
2
2
2
2
∂∂δ
∂∂δ
∂∂
∂∂
∫ ∫∫Γ Ω
−
− ; ),cos(2 2
2
2
2
2
2dydxw
ywD
xdsxNw
ywD
xδ
∂∂
∂∂δ
∂∂
∂∂ (3.113)
∫∫∫∫∫ΓΩΩ
−+
=
dsxN
yw
xwDdxdyD
yxwdxdy
yxwD ),cos(
y 2
22222
∂∂δ
∂∂∂δ
∂∂∂
∂∂∂δ
∫ ∫∫Γ Ω
=
−
− ,
),cos(
y 2
222dydxw
yxwD
yxdsyNw
xwD
xδ
∂∂∂
∂∂∂δ
∂∂∂
∂∂
∫∫∫ΓΩ
−+
= dsyN
xw
yxwDdxdyD
xw ),cos(
2
y
222
∂∂δ
∂∂∂δ
∂∂∂
∫ ∫∫Γ Ω
−
− ; ),cos(
2
222dydxw
yxwD
yxdsxNw
yxwD
yδ
∂∂∂
∂∂∂δ
∂∂∂
∂∂ (3.114)
Substituting these expressions in the formula (3.110), we receive
( )
∫∫ ∫∫ΩΩ
−⋅−−
+
−= +dy dydx w
y 12
1 2
22
2
2
2
22
2
2
2
2
dxDx
wyw
xw
yw
xw
L δρ
∂∂∂
∂∂
∂∂µ
∂∂
∂∂
λδ
−
−+
+−+ ∫∫∫ Γ
Ω
dsxwyN
yxwDxN
yw
xwD
w ∂∂δ
∂∂∂µ
∂∂µ
∂∂
ρλ ),cos()1(),cos(
dydx 2 2
2
2
2
2
2
+
−+
+− ∫
Γ
dsywxN
yxwDyN
xw
ywD
∂∂δ
∂∂∂µ
∂∂µ
∂∂ ),cos()1(),cos(
2
2
2
2
2
∫Γ
+
−+
++ ),cos()1(
2
2
2
2
2xN
yxwD
yyw
xwD
x ∂∂∂
∂∂µ
∂∂µ
∂∂
∂∂
−
−+
++ ds),cos()1(
2
2
2
2
2wyN
yxwD
xxw
ywD
yδ
∂∂∂
∂∂µ
∂∂µ
∂∂
∂∂
+
++
+− ∫∫
Ω2
2
2
2
2
2
2
2
2
2
2
2
xw
ywD
yyw
xwD
x ∂∂µ
∂∂
∂∂
∂∂µ
∂∂
∂∂
.0dy dx )1(2 222
=
−
−+ ww
yxwD
yxδρω
∂∂∂µ
∂∂∂ (3.115)

Danilin Alexander. Stiffness Optimization of Airframe. Page 60
Let's remark, that in expression (3.115) there are two groups of items. In the first enter that, which one contain an integration on area Ω, and in second enter such, which one contain an integration on a closed loop Γ. The first group includes integrals containing independent from each other variations δD and δw. As the variations δD and δw are arbitrary in area Ω, in according to the basic lemma of a calculus of variations, we receive:
- Differential equation of vibration for a plate
+
++
+ 2
2
2
2
2
2
2
2
2
2
2
2
xw
ywD
yyw
xwD
x ∂∂µ
∂∂
∂∂
∂∂µ
∂∂
∂∂
; 0)1(2 222
=−
−+ w
yxwD
yxρω
∂∂∂µ
∂∂∂ (3.116)
- and optimality condition
( ).0
dydx w
y 12
1 2
22
2
2
2
22
2
2
2
2
=
−⋅−−
+
−∫∫Ω
ρ
∂∂∂
∂∂
∂∂µ
∂∂
∂∂
λx
wyw
xw
yw
xw
(3.117)
Let’s convert the stayed items. Bending moments Mx and My and torsion moment Mxy will be written as:
; 2
2
2
2
+−=
yw
xwDM x ∂
∂µ∂∂
; 2
2
2
2
+−=
xw
ywDM y ∂
∂µ∂∂ (3.118)
; )1(2
yxwDM xy ∂∂
∂µ−−=
and shear force are equal
. ;y
Mx
MQ
yM
xMQ yxy
yxyx
x ∂∂
∂∂
∂∂
∂∂
+=+= (3.119)
Substituting the formulas (3.118) ... (3.119) in stayed items, we receive
[ ]
++= ∫∫∫ ΓΩ
ds ),cos(),cos(dydx
22 x
wyNMxNMw
J xyx ∂∂δ
ρλδ
[ ] −++ ∫Γ
ds ),cos(),cos(ywyNMxNM yxy ∂∂δ
[ ] .0 ds ),cos(),cos( =
+− ∫Γ
wyNQxNQ yx δ (3.120)
The variations of a vibration mode derivative on coordinates can be written as:

Danilin Alexander. Stiffness Optimization of Airframe. Page 61
++=
+−=
.w ),cos(sw ),cos(
;w ),cos(sw ),cos(
NyNxN
yw
NxNyN
xw
∂∂δ
∂∂δ
∂∂δ
∂∂δ
∂∂δ
∂∂δ
(3.121)
Having substituted these expressions in the formula (3.120), we receive
[ ]
+−+= ∫∫∫ Γ
Ω
swyNMxNM
wJ xyx ∂
∂δρ
λδ y)cos(N, ),cos(),cos(dydx
22
[ ]∫Γ
⋅++ ),cos(),cos(+ ds
Nw ),cos( yNMxNMxN xyx∂∂δ
[ ] =
+−
+⋅ ∫
Γ
ds w ),cos(),cos(ds Nw ),cos(
sw ),cos( δ
∂∂δ
∂∂δ yNQxNQyNxN yx
[
−−−−= ∫∫∫ ΓΩ
),(cos),cos(),cos()(dydx
2 22 xNMyNxNMM
w xyyxρλ
] [∫Γ
⋅+++− ),cos(2),(cos),(cossw ),(cos 222 xNMyNMxNMdsxN xyyx∂∂δ
] [ ] .0ds w ),cos(),cos(w ),cos( =
+−⋅ ∫Γ
δ∂∂δ yNQxNQdsN
yN yx (3.122)
Shear force, bending and torsion moments on a plate contour will be written as:
++=−−−=
+=
).,cos(),cos(2),(cos),(cos)];,(cos),([cos),cos(),cos()(
);,cos(),cos(
22
22
yNxNMyNMxNMMynxNMyNxNMMM
yNQxNQQ
xyyxNs
xyyxN
yxN
(3.123)
With taking into accout (3.123) equation (3.122) will be converted to the form:
=
−+−= ∫∫∫∫∫ ΓΓΓ
Ω
ds dydx
22 wQds
NwMds
swM
wJ NNNs δ
∂∂δ
∂∂δ
ρλδ
(3.124)
.ds ds dydx
22
−++−= ∫∫∫∫∫ ΓΓΓ
Γ
Ω
wQdsNwMw
sMwM
w NNNs
Ns δ∂∂δδ
∂∂δ
ρλ
At obtaining this expression we have integrated by parts the first item. Taking into account, that the variation δw increment by going around the contour is equal to zero value, we receive a condition
.0ds w =
−− ∫∫
ΓΓ
δ∂
∂∂∂δ
sMQds
NwM Ns
NN (3.125)

Danilin Alexander. Stiffness Optimization of Airframe. Page 62
The equality (3.125) in reality is boundary condition that is valid at all possible ways of
fastening. Really, for a fully-fixed contour the equality ,0==Nww∂∂ is valid and the condition (3.125)
will be valid too. For simply supported edge w = 0, and Nw∂∂ - arbitrary function, therefore it is ground
equalities (3.125) we have
.0 =∫Γ
dsNwM N ∂∂δ (3.126)
Having applied the basic lemma of a calculus of variations, we receive a condition MN = 0. For
mobile solid support Nw∂∂ = 0, a the sags function is arbitrary. Therefore here is valid equality
0,=ds w δ∂
∂∫Γ
−
sMQ Ns
N (3.127)
wherefore we receive s
MQ NsN ∂
∂− = 0. If the boundary contour is free, w and
Nw∂∂ - are arbitrary and
are independent. On it the expressions (3.126) and (3.127) should be valid. Therefore, on a free contour
MN = 0 and s
MQ NsN ∂
∂− = 0.
All these reasoning are valid when any way of supporting is carried out not on all length of
contour Γ, but only on its part. In this case fulfilment of appropriate conditions needs to be demanded for a part of a contour.
To get the solution of a system (3.116) - (3.117) in the closed form is not obviously possible;
therefore we consider this system more detail. From a boundary problem (3.116) ... (3.125) forms f(z) are determined within a constant
coefficient, therefore by an appropriate normalization it is possible to achieve, that
∫∫
Ω
=1dydx 2wρ (3.128)
by all variations D(x, y). With taking into account (3.128) conditions (3.44) will takes the kind:
.1)1( 222
2
2
2
22
2
2
2
2const
yxw
yw
xw
yw
xw
==
−⋅−−
+
λ∂∂∂
∂∂
∂∂µ
∂∂
∂∂ (3.129)
In a differential geometry there is the concept of main surface curvatures defined as eigenvalues
of a matrix of curvatures in the cartesian coordinate system [45]

Danilin Alexander. Stiffness Optimization of Airframe. Page 63
.
2
22
2
2
2
=
yw
yxw
yxw
xw
K
∂∂
∂∂∂
∂∂∂
∂∂
(3.130)
It is known, that the sum of main curvatures is equal the spur of matrix, and their product is
equal matrix determinant (3.130). Having substituted these ratios in the optimality condition (3.129), we receive
,12 2122
21 constKKKK ==++
λµ (3.131)
where K1 and K2 - greatest and least (main) curvatures of plate surface deformed in according with the form w(x,y). The bending moments M1 and M2 on a direction of main curvatures are determined as
).(K M );(K 122211 KDKDM µµ +−=+−= (3.132)
With taking into account (3.132) optimality criterion (3.131) will be accepted in a final form:
.12211 constD
KMKM=−=
+λ
(3.133)
Thus, with according to made assumptions, in a structure having a minimum of bending
stiffness and having a given value of any natural frequency, the sum of products of main curvatures of the appropriate form and moments on a direction of these curvatures devide on bending stiffness, should be constant in any point (x, y) of structure.
Following [22] on the basis of criterion (3.133) it is possible to receive a recursion formula for
assignment of new stiffness D(x, y), ensuring fulfilment of the given requirement. Let's multiply left and right member (3.87) on (3.133) on D2(x, y) and after elementary conversions we receive
; 22111 KMKMDrD +=+ νν (3.134) where r - some constant coefficient, and ν - iteration number.
3.4.2.2. Designing algorithm for isotropic plates
With usage of obtained results it is possible to construct simple algorithm for searching of
material distribution ensuring given natural frequencies of a sandwich plate of variable thickness with isotropic layers.
1. Let there is an initial stiffness distribution D0 on structure elements. 2. We calculate frequencies and forms of natural oscillations of structure.

Danilin Alexander. Stiffness Optimization of Airframe. Page 64
3. For constrained frequencies on expressions (3.134) we calculate new values jD 1+ν (ν - number of iteration, j - number of frequency).
4. We shall select maximum max1+νD from all stiffnesses assigned in the previous block:
. )( max 1max
1j
jDD ++ = νν (3.135)
5. If there is the strength limitation such as [ ]σν DD ≥+1 , then we select D1 as maximum from max
1+νD and [ ]σD : [ ]). , ( max max
11 σν DDD += (3.136) 6. If there is the structurally-technological limitation such as [ ]hDD ≥+1ν , then we select Dν+1 as
maximum from D1 and [Dh]: [ ]). ,D ( max 11 hDD =+ν (3.137) 7. We go to block 2 with elastic distribution Dν+1. Calculations in cycle 2 - 7 are gone on till fulfilment of limitations on frequencies, or before
stabilization of material distribution among elements. The second case shows that within the framework of optimality criterion (3.133) it is impossible to find elastic distribution ensuring given frequencies and it is required to change a distribution law of passive weights, or proportionally to increase stiffness for all load-bearing elements.
At the same time, for actual wings structures the formula (3.134) does not give a capability to
construct iterative designing algorithm, because the actual wings represent structurally orthotropic plates having different stiffness in a direction of spars and ribs, but in (3.134) we control only alone stiffness parameter. Therefore criterion (3.133) has practical value only for isotropic plates of variable thickness and allows optimizing structures such as blades of turbines, sandwiching shells etc.
3.4.2.3. Orthotropic plates
The orthotropic plate is featured both stiffness parameters and angle of orientation of orthotropy axes. We separate the task of optimization for orthotropic plate onto two independent tasks: 1) task of optimization stiffness parameters at constant orientation angle of orthotropy axes; 2) task of optimization of orthotropy axes orientation angle at constant distribution of a load-carrying material.
At first we receive the optimality conditions for the first of these tasks. For simplification of a criterion making let’s direct the coordinates axis Ox and Oy along orthotropy axes. As design variables we shall accept bending D11(x,y), D22(x,y) and torsional D66(x,y) stiffneses of an orthotropic plate [2, 101, 157]. For such plate the square of a natural frequency is determined by Rayleigh ratio:
.dydx
42
2
22
662
2
2
2
12
2
2
2
22
2
2
2
11
2
∫∫
∫∫
Ω
Ω
++
+
=w
dxdyyxwD
yw
xwD
ywD
xwD
ρ
∂∂∂
∂∂
∂∂
∂∂
∂∂
ω (3.138)

Danilin Alexander. Stiffness Optimization of Airframe. Page 65
The Poisson's constants along orthotropy axes express as
. ;22
121
11
121 D
DDD
== µµ (3.139)
With taking it into account it is possible to eliminate stiffness D12 from (3.138). Then
+
++
+= ∫∫
Ω2
2
2
2
2
2
222
2
2
2
2
2
112
yw
xw
ywD
xw
yw
xwD
∂∂
∂∂µ
∂∂
∂∂
∂∂µ
∂∂ω
.dydx wdydx y
4 222
66 ∫∫Ω
+ ρ
∂∂∂x
wD (3.140)
The criterion function should depend on a structural weight and to be invariant concerning a direction of orthotropy axes. Let's use therefore such linear combination of plate stiffnesses, which one will be invariant concerning a rotation of orthotropy axes. In this case it is only possible separately to optimize stiffness distribution and turn angle of orthotropy axes.
There are known [52] two invariants of stiffnesses of orthotropic plates: I1 = D11 + D22 + 2D12; I2 = D12 - D66. (3.141) Let's make from these invariants a function, having eliminated stiffness D12. In the total we
receive I = I1 - 2I2 = D11 + D22 + 2D66. (3.142) The invariant I depends only on design variables D11, D22, D66 and does not change by rotation
of orthotropy axes. Let's formulate now following task of optimization. Among functions D11(x,y), D22(x,y),
D66(x,y) to find such, which one provides minimum for a functional
( )∫∫Ω
⇒++= min,dydx 2 662211 DDDJ (3.143)
by isoperimetric limitation ; 022
0 =−ωω (3.144) Where ω is determined by Rayleigh ratio (3.140) for an orthotropic plate at made earlier assumptions.
The extended functional after grouping terms containing like stiffness, will be written in the form:

Danilin Alexander. Stiffness Optimization of Airframe. Page 66
∫∫ ∫∫∫∫ ∫∫ ΩΩ
ΩΩ
+
−+
+
−= dxdydxdy
1dxdydxdy
1 2
22
662
2
2
2
2
12
2
11 wyxw
Dw
xw
yw
xw
DLρ
∂∂∂
λρ
∂∂
∂∂µ
∂∂
λ
. dxdydxdy
1 02
2
2
2
2
22
2
22 ωλρ
∂∂
∂∂µ
∂∂
λ∫∫ ∫∫ΩΩ
+
+
−+w
yw
xw
yw
D (3.145)
The total variation of a functional (3.145) calculates by analogy with the calculations
(3.110)...(3.115), and in the total we receive:
∫∫ ∫∫∫∫ ∫∫ ΩΩ
ΩΩ
+
−+
+
−= dxdydxdy
1dxdydxdy
1 662
22
112
2
2
2
2
12
2
Dw
yxw
Dw
xw
yw
xw
L δρ
∂∂∂
λδρ
∂∂
∂∂µ
∂∂
λδ
∫∫ ∫∫ΩΩ
+
+
−+ dxdydxdy
1 222
2
2
2
2
22
2
Dw
yw
xw
yw
δρ
∂∂
∂∂µ
∂∂
λ
−
+
+−+ ∫∫∫ Γ
Ω
dsxwyN
yxwDxN
yw
xwD
dxdyw ∂∂δ
∂∂∂
∂∂µ
∂∂
ρλ ),cos(2),cos(2 2
662
2
12
2
112
+
+
+− ∫
Γ
dsywxN
yxwDyN
xw
ywD
∂∂δ
∂∂∂
∂∂µ
∂∂ ),cos(2),cos(
2
662
2
22
2
22
+
+
+
+ ∫Γ
),cos(22
662
2
12
2
11 xNyxwD
yyw
xwD
x ∂∂∂
∂∂
∂∂µ
∂∂
∂∂
−
+
++ wdsyN
yxwD
xxw
ywD
yδ
∂∂∂
∂∂
∂∂µ
∂∂
∂∂ ),cos(2
2
662
2
22
2
22
∫∫Ω
+
+
+
+− 2
2
22
2
222
2
2
2
12
2
112
2
xw
ywD
yyw
xwD
x ∂∂µ
∂∂
∂∂
∂∂µ
∂∂
∂∂
.0 4 22
66
2=
−
+ wdxdyw
yxwD
yxδρω
∂∂∂
∂∂∂ (3.146)
We will operate the same, as for isotropic plates, and taking into accout condition (3.128), we
receive:

Danilin Alexander. Stiffness Optimization of Airframe. Page 67
- optimality criterion
;1 222
2
2
2
2
22
2
2
2
2
2
12
2
λ∂∂∂
∂∂
∂∂µ
∂∂
∂∂
∂∂µ
∂∂
=
=
+=
+
yxw
yw
xw
yw
xw
yw
xw (3.147)
- and differential equation of plate oscillations
++
+ 2
2
22
2
222
2
2
2
12
2
112
2
xw
ywD
yyw
xwD
x ∂∂µ
∂∂
∂∂
∂∂µ
∂∂
∂∂ ; 04 2
2
66
2=−
+ w
yxwD
yxρω
∂∂∂
∂∂∂ (3.148)
with boundary conditions (3.126) and (3.127).
With usage equations
−=
+−=
+−=
; 2
;
;
2
66
2
2
22
2
22
2
2
12
2
11
yxwDM
xw
ywDM
yw
xwDM
xy
y
x
∂∂∂
∂∂µ
∂∂
∂∂µ
∂∂
(3.149)
we record the optimality criterion as:
. 1
66
2
22
2
2
11
2
2
constD
yxwM
DywM
DxwM xyyx
=−===λ
∂∂∂
∂∂
∂∂
(3.150)
Thus, with taking into account the made assumptions, in optimum by criterion (3.143)
structures having a set value of any natural frequency, the product of the appropriate form curvature on a direction orthotropy axes and moment on the same direction devided on appropriate stiffness, should be constant in any point (x, y) of structure.
On the basis of optimality criterion (3.150) it is possible to receive recursion formulas for assignment of new stiffnesses:
=
=
=
+
+
+
; M D
; M D
; M D
2
xy661
66
2
2
y221
22
2
2
x111
11
yxwrD
ywrD
xwrD
∂∂∂
∂∂
∂∂
νν
νν
νν
(3.151)

Danilin Alexander. Stiffness Optimization of Airframe. Page 68
where r - some constant coifficient, and n - number of iteration.
3.4.2.4. Optimization of an orientation angle of orthotropy axes Let's formulate the optimization task as follows. We minimize a functional
min,dydx w
dydx ),(
22 ⇒−=−=
∫∫
∫∫
Ω
Ω
ρω
wDfJ (3.152)
Where the specific potential energy of natural oscillations f(D,w) is determined by expression [52,53]
∫∫Ω
+′+′+
′+
′=
yxw
xwD
yw
xwD
ywD
xwDwDf
∂∂∂
∂∂
∂∂
∂∂
∂∂
∂∂ 2
2
2
162
2
2
2
12
2
2
2
22
2
2
2
11 22),(
.dy dx 4222
66
2
2
2
26
′+′+
yxwD
yxw
ywD
∂∂∂
∂∂∂
∂∂ (3.153)
Stiffnesses D'ij in fixed coordinate system xoy are connected to given stiffnesses Dij in a system
ξPη, created by axes orthotropy, known conversion formulas [52, 53]: D'11 = D11cos4α + 2 (D12+D66) sin2α cos2α + D22sin4α; D'22 = D11sin4α + 2 (D12+D66) sin2α cos2α + D22cos4α; D'12 = D12 + [D11+D22 - 2 (D12+D66)] sin2α cos2α; (3.154) D'66 = D66 + [D11+D22 - 2 (D12+D66)] sin2α cos2α; D'16 = [D22sin2α - D11cos2α - 2 (D12+D66) cos2α] sinα cosα; D'26 = [D22cos2α - D11sin2α - 2 (D12+D66) cos2α] sinα cosα; Where α - is angle between an axis Ox and Pξ, see fig. 3.32. The formulas (3.154) can be
overwriting as follows: D'11 = C1cos4α + C2sin4α + C3; D'22 = C1sin4α + C2cos4α + C3; D'12 = D12 + [C1+C2] sin2α cos2α; (3.155) D'66 = D66 + [C1+C2] sin2α cos2α; D'16 = [C2sin2α - C1cos2α] sinα cosα; D'26 = [C2cos2α - C1sin2α] sinα cosα;
where C1 = D11 - D12 - 2D66; C2 = D22 - D12 - 2D66; (3.156) C3 = D12 + 2D66.

Danilin Alexander. Stiffness Optimization of Airframe. Page 69
Physically constants C1 and C2 are only the stringer sets stiffnesses of structurally orthotropic plate, and C3 – is only skin stiffness without regarding of supporting sets [54].
Thus, the square of a natural frequency (3.152) depends on an orientation angle of orthotropy
axes. For convenience obtainings necessary conditions for stationarity ω2 in depending on α we enter
into consideration a axes system along the direction of main curvatures XPY and we designate main curvatures in some point (x,y) plate through K1, K2 and K3 (K3 = 0). Let ϕ - is the angle between axes PX and Pξ, and χ - is the angle between axes ox and PX. Then in according with fig. 3.32 we have
ϕ = α - χ. (3.157)
Coordinate systems
Fig. 3.32.
The values yxw
yw
xw
∂∂∂
∂∂
∂∂ 2
2
2
2
2 , , and K1, K2, K3 are connected among themselves by conversion
formulas:
−=
−+=
++=
. 2cos+cos sin K
; 2coscossin
; 2cossincos
2
2
2
2
2
3
22
2
22
2
2
2
22
2
22
2
2
1
χ∂∂
∂χχ∂∂
∂∂
χ∂∂
∂χ∂∂χ
∂∂
χ∂∂
∂χ∂∂χ
∂∂
yxw
yw
xw
yxw
yw
xwK
yxw
yw
xwK
(3.158)

Danilin Alexander. Stiffness Optimization of Airframe. Page 70
It is possible to convert a function f(D,w). Let's take into account, that if a angle α = ϕ, then
0 , , 3
2
22
2
12
2==== K
yxwK
ywK
xw
∂∂∂
∂∂
∂∂ , and the specific potential energy will be the following:
f(D,w) = D'11(ϕ) K21 + 2 D'12(ϕ) K1K2 + D'22(ϕ) K22 = = (C1cos4ϕ+C2sin4ϕ+C3) K21 + 2 [D12 + (C1+C2) sin2ϕ cos2ϕ] K1K2 + + (C1sin4ϕ+C2cos4ϕ+C3) K22 = = (C1+C2) (K1-K2) 2 cos4ϕ + 2 (C1K2-C2K1) (K1-K2) cos2ϕ + + D11K22+2D12K1K2+D22K21. (3.159) Let's designate
a = (C1+C2) (K1-K2)2; b = (C1K2-C2K1) (K1-K2); (3.160) c = D11K22+2D12K1K2+D22K21.
Then f(D,w) = a cos4ϕ + 2b cos2ϕ +c. (3.161) For obtaining necessary conditions of a stationarity we demand equality to zero value of the
first variation of functional (3.152). Let's remark, that it is possible to consider not dependent from α the angle χ, which one depends only on curvature components:
.2
=2
2
2
2
2
2
yw
xw
yxw
tg
∂∂
∂∂
∂∂∂
χ−
(3.162)
As α = ϕ + χ, it is possible to put δα = δϕ and ∂ϕ∂
∂α∂ ff
= and then the condition of a stationarity
will look like:
( )
=
+
−=∫∫
∫∫
Ω
Ω
dydx
dydx c+ cos 2cos
2
24
w
baJ
ρ
ϕϕδδ
( )
. 0dydx
dydx cos a 2sin2
2
2
=
+
=∫∫
∫∫
Ω
Ω
w
b
ρ
δαϕϕ (3.163)
The condition (3.163) contains three different ways of orthotropy axes orientation: 1) sin ϕ = 0; 2) cos ϕ = 0; (3.164)
3) . 1ab0 ;cos2 ≤≤−=
abϕ

Danilin Alexander. Stiffness Optimization of Airframe. Page 71
To these ways of orientation there correspond following values of a specific potential energy: f1 = D11 K21 + 2D12 K1 K2 + D22 K22; f2 = D11 K22 + 2D12 K1 K2 + D22 K21; (3.165)
f3 = ( )[ ]( )( ) . 4
2 2 2
216666122211
212
66122211 KKDDDDD
KKDDDD+
+−+++−
Let's suspect, that (D11 - D22) (K1 - K2) > 0, that is either D11 > D22 and K1 > K2, or D11 < D22
and K1 < K2. Having compounded differences (f1 - f2), (f1 - f3) and (f2 - f3), and taking into account, that (C1 - C2) = (D11 - D22), we receive:
f1 - f2 = (C1 - C2) (K21 - K22) > 0;
f1 - f3 = 21
22211 )(
CCKCKC
+− > 0; (3.166)
f2 - f3 = 21
21221 )(
CCKCKC
+− > 0.
From here, with taking into account, that (C1 - C2) = (D11 - D22), we have f1 > f2 > f3. (3.167) Therefore, to criterion function minimization or to increase of a natural frequency results the
first direction orthotropy axes, that is the angle between a direction of maximum stiffness and line of maximum curvature should be equal zero.
The similar deduction can be received, considering a case when (D11 - D22) (K1 - K2) < 0, that is D11 < D22 and K1 > K2 or D11 > D22 and K1 < K2. Then it is possible to receive an inequality
f2 > f1 > f3; (3.168)
So the angle between a direction of maximum stiffness and line of minimum curvature should be equal π /2.
Thus, in an optimum orthotropic structure a direction of maximum stiffness and direction of
maximum curvature should coincide in any point.
3.4.2.5. Designing algorithm of orthotropic plates With usage of obtained outcomes it is possible to construct simple algorithm of searching of
distribution of a material ensuring given free-running frequencies. 1. Let there is an initial stiffness distribution 0
iiD on structure elements (ii = 11, 22, 66). 2. We calculate frequencies and forms of natural oscillations of structure. 3. We shall route axes of stringer sets along lines of main curvatures of the surface, deformed
on a vibration mode of a design or in a direction, defined by the technological requirements, if those are available.

Danilin Alexander. Stiffness Optimization of Airframe. Page 72
4. For constrained frequencies on expressions (3.152) we calculate new values 1
,+νjiiD (ν -
number of iteration, j - number of frequency). 5. We shall select maximum 1
max,+ν
iiD from all stiffnesses assigned in the previous block:
)(D max 1+jii,
1max,
νν
jiiD =+ . (3.169)
6. If there is the strength limitation such as [ ]σν
,1
, iijii DD ≥+ then we select 11,+ν
iiD , maximum from 1
max,+ν
iiD and [ ]σ,iiD :
[ ]( ) ,D max ,1+maxii,
11, σ
ννiiii DD =+ . (3.170)
7. If there is the technological limitation such as [ ]hiijii DD ,1
, ≥+ν then we select 1+νiiD , maximum
from 11,+ν
iiD and [ ]hiiD , :
[ ]( ) ,D max ,1+
ii,11
hiiii DD νν =+ . (3.171)
8. We go to block 2 with stiffness distribution 1+νiiD .
We are continuing evaluations in cycle 2 - 8 either until fulfilment of the frequencies
limitations, or until stabilization material distribution among elements. The second case show that within the framework of optimality criterion (3.150) it is impossible to find material distribution ensuring given frequencies and it is required to change a distribution law of passive weights, or proportionally increase stiffness for all load-bearing elements.
3.4.2.6. Test example. Delta wing structure optimization Let's consider algorithm behavior on the test hypothetical delta wing. In a Fig. 3.33 the
computational model of its torsion box structure is shown. Evaluation of the natural forms and frequencies we shall conduct on the basis of a finite element
method with usage of a complex of the programs DRACO. Let's describe a skin by shift finite elements, spars and ribs - units such as "flange beam" [55], and for ribs its boom area equal 500 mm2, for spars - 1000 mm2. Walls thickness for spars and ribs - 1 mm, skin thickness - 1 mm. The semispan of a wing makes 3 m, rooted and tip chord - 3,6 m and 1,2 m accordingly.
Fig. 3.33.

Danilin Alexander. Stiffness Optimization of Airframe. Page 73
Weight of load-carrying material of torsion box structure by such geometrical and stiffness
characteristics is equal 164 kgs at material density 2620kg/m3. Besides, on torsion box we shall arrange proportionally to chords passive weights so that general weight of a wing has is equal 1640 kg.
At such input datas the structure has the lowest forms and natural frequencies, displayed in fig. 3.34. For the purposes of our research we shall consider only six vibration modes.
With the help of designed algorithm we shall reallocate a material of an initial design for increase of frequency of the first form natural oscillations. And a coefficient r in (3.151) we shall select so that the material volume of a force torsion box was equal material volume for an initial structure. We will vary the boom areas of spars and ribs. Walls thickness for ribs, spars and skin we shall not vary.
The algorithm converged with accuracy 0,02 for two iterations. The boom area for ribs become equal to lower limitation (20 mm2), boom areas distribution for spars ensuring maximum frequency of the first vibration mode, is displayed in a fig. 3.35.
By adding of a material in a load-carrying part of the structure by its distribution proportionally to the boom areas can be changed natural frequencies, as shown in a fig. 3.36. Only reallocations of an initial load-carrying material we could increase the first natural frequency on 16%, and at reasonable volume of an added material - on 57%. From here it is possible to make a conclusion about functionability of tendered algorithm.
Fig. 3.34

Danilin Alexander. Stiffness Optimization of Airframe. Page 74
Fig. 3.35.
Fig. 3.36.
RESUME On it we finish consideration the theoretical aspects of optimality criteria. Many base ideas and
methods in the considered examples are not deprived grace, however these ideas do not settle possibilities of structural optimization methods. It is only the beginning, and the following big theme for discussion will be the technology of application of optimality criteria which is fundamental to all design activity on creation aviation and space vehicles. We will get acquainted with traps and paradoxes of application of optimality criteria, with ways of their overcoming, with methods of designing of structure sceleton, indemnification of the cuts, new approaches to designing of facilities for carrying out of structural tests and many other things.

Danilin Alexander. Stiffness Optimization of Airframe. Page 75
REFERENCES
1. Вейнингер О. Пол и характер. Принципиальное исследование. /Полный пер. с 10-го нем. изд. С.Пресса под ред. б.приват-доцента Киевского ун-та А.Грена. -М: Изд-во Сфинкс, 1909. -420с.
2. Метод нахождения кривых линий, обладающих свойствами максимума или минимума, или решение изопериметрической задачи, взятой в самом широком смысле, Леонарда Эйлера, королевского профессора и члена Императорской Петербургской Академии наук. //Классики естествознания /Под ред. Н.С.Кошлякова. -М-Л: ГТТИ, 1934. Приложение 1. Об упругих кривых, с. 447-572.
3. Эйлер Л. Диссертация о принципе наименьшего действия с разбором возражений славнейшего проф. Кенига, выдвинутых против этого принципа. //Вариационные принципы механики /Под ред. Л.С.Полака. -М: Физматгиз, 1959, [932с] с. 96-108.
4. Пуанкаре А. Идеи Герца в механике. //Герц Г. Принципы механики, изложенные в новой связи. -М: АН СССР, 1959, с. 310-333.
5. Герц Г. Принципы механики, изложенные в новой связи. -М: АН СССР, 1959. -386с. 6. Галилео Галилей. Беседы и математические доказательства, касающиеся двух новых
отраслей науки, относящихся к механике и местному движению. //Сочинения, т.1. Серия "Классики естествознания". -М-Л: Гос. тех.-теор. изд., 1934, с. 274-278.
7. Ляв А. Математическая теория упругости. -Л-М: ГТТИ, с. 42. 8. Przemieniecki J. Theory of Matrics Structural Analysis. -New York: McGraw Hill, 1968. -
468p. 9. Robinson J. Integrated Theory of Finite Element Methods. -London, Sydney, Toronto: Willey
& Sons, 1973. -428p. 10. Navier L.M. Resume des lecons donnees a l'ecode des ponts et chaussees. -Paris, 3-me ed.,
1864. 11. Рабинович И.М. К теории статически неопределимых ферм. -М: Трансжелдориздат,
1933. -127с. 12. Maxwell J.C. Scientific Papers 11.: Cambridge University Press, 1869, pp. 175-177. 13. Michell A.G.M. The Limits of Economy of Materials in Frame Structures. //Phil. Magazine,
1904, V. 8, No 47, pp. 589-595. 14. Уайлд Д. Оптимальное проектирование. -М: Мир, 1981. -272с. 15. Растригин Л.А. Статистические методы поиска экстремума. -М: Наука, 1968. -376с. 16. Гилл Ф., Мюррей У., Райт М. Практическая оптимизация. -М: Мир, 1985. -510с. 17. Соболь И.М., Статников Р.Б. Выбор оптимальных параметров в задачах со многими
критериями. -М: Наука, 1981. -110с. 18. Wasiutynski Z. On the Congruency of the Forming According to the Minimum Potetial
Energy with that According to the Equal Strenght. //Bull. Acad. Pol. Sci., vol. VII, No 6, 1960, pp. 259-268.
19. Комаров А.А. Силовое конструирование. //Труды Куйбыш. авиац. ин-та, вып. 1. -Куйбышев, 1952, с. 36-48.
20. Комаров А.А. Основы проектирования силовых конструкций. -Куйбышев: Куйбыш. книжн. изд-во, 1965. -88с.
21. Химмельблау Д. Прикладное нелинейное программирование. /Под ред. М.Л. Быховского. -М: Мир, 1975. -534с.
22. Хог Э., Арора Я. Прикладное оптимальное проектирование. -М: Мир, 1983. -478с. 23. Kicher T.P. Structural synthesis of integrally stiffened cylinders. //J. Spacecraft and Rockets,
1968, v. 5, pp. 62-67.

Danilin Alexander. Stiffness Optimization of Airframe. Page 76
24. Численные методы условной оптимизации. //Редакторы Ф.Гилл, У.Мюррей. -М: Мир, 1977. -290с.
25. Хог Э.,Чой К., Комков В. Анализ чувствительности при проектировании конструкций. -М: Мир, 1988. -482с.
26. Шмит Л.А. Оптимизация конструкций. Некоторые основополагающие идеи и понятия. //Новые направления оптимизации в строительном проектировании /Под ред. Э.Атрека, Р.Г.Галлагера, К.М.Рэгзделла, О.К.Зенкевича. -М: Стройиздат, 1989, с. 8-55.
27. Venkayya V.B., Khot N.S. Design of optimum structures to impulse type loading. //AIAA J., 1975, V. 13, No 8, pp. 989-994.
28. Хан Х. Теория упругости: Основы линейной теории и ее применения: Пер. с нем./ X. Хан –М.: Мир, 1988. -344с., ил. (Han H. Theory of elasticity: Bases of the linear theory and its application: The translation from Germany./X. Han - Moscow: Mir, 1988.-344pp., ill.)
29. Комаров В.А. О рациональном распределении материала в конструкциях. // В.А. Комаров -Изв. АН СССР. Механика, 5, 1965, с. 85-88 (V.A.Komarov About rational distribution of a material in designs.//V.A.Komarov- Proceedings of the USSR Academy of Sciences, Mechanics, 5, 1965, pp.85-88).
30. Новые направления оптимизации в строительном проектировании / М.С. Андерсон, Ж.-Л. Арман, Дж. Арора и др.; Под ред. Э. Атрека и др.; Пер. с англ. К.Г.Бомштейна. –М.: Стройиздат, 1989. -592с.: ил. – (New Directions in Optimum Structural Design / Ed. By E. Atrek, R.H. Gallagher, K.M. Ragsdell, O.C. Zienkiewicz. John Wiley and Sons, Chichester, New York, Brisbane, Toronto, Singapore, 1984. ISBN 5-274-00334-6).
31. Гордон Дж. Конструкции, или почему не ломаются вещи. /Пер. с англ. В.Д.Эфроса /Под ред. С.Т.Милейко. -М: Мир, 1980. -390с.
32. Вейгелин К.Е. Очерки по истории летного дела. -М: Оборонгиз, 1940. -458с. 33. Бисплингхофф Р.Л., Эшли Х., Халфмэн Р.Л. Аэроупругость. -М: ИЛ, 1958. -799с. 34. Шавров В.Б. История конструкций самолетов в СССР до 1938 года. Изд. 2-е перераб. и
доп. -М: Машиностроение, 1978. -576с. 35. Рабинович И.М. К теории статически неопределимых ферм. -М: Трансжелдориздат,
1933. -127с. 36. Гроссман Е.П. Упрощенный метод определения критической скорости изгибно-
рулевого флаттера. -М: Изд-во БНТ, 1941. -10с. 37. Макаревский А.И. О требованиях к жесткости конструкции скоростного самолета. -М:
Изд-во БНТ ЦАГИ, 1946. -9с. 38. Вопросы аэроупругости при проектировании летательных аппаратов. //Техническая
информация 16. -М: ЦАГИ, 1977, с. 7-27. 39. Виноградов Р.И. О допущении и использовании самовозбуждающихся колебаний
конструкции. //Труды РВККИУ N 18. -Рига, 1962. -310с. 40. Theodorsen T. General Theory of Aerodynamick Instability and the Mechanism of Flutter.
//NASA Report, 496, 1935. 41. Пановко Я.Г., Губанова И.И. Устойчивость и колебания упругих систем. Современные
концепции, парадоксы и ошибки. Изд. 2-е, испр. -М: Наука. -420с. 42. Schmit L.A. Structural Design by Systematic Synthesis. //Proceeding of the second ASCE
Conference on Electronic Computation, 1960, Pittsburg, Pennsylvania, pp. 105-122. 43. Образцов И.Ф., Савельев Л.М., Хазанов Х.С. Метод конечных элементов в задачах
строительной механики летательных аппаратов: Учебное пособие для студ. авиац. спец. вузов. -М: Высшая школа, 1985, -392с.

Danilin Alexander. Stiffness Optimization of Airframe. Page 77
44. Расчеты машиностроительных конструкций методом конечных элементов: Справочник. /В.И. Мяченков, В.П. Мальцев, В.П. Майборода и др.; Под общ. ред. В.И. Мяченкова. -М: Машиностроение, 1989. -520с.
45. Корн Г., Корн Т. Справочник по математике: Для научных работников и инженеров. Определения, теоремы, формулы. /Под общ. ред. И.Г. Арамановича. -М: Наука, 1974. -831с.
46. Строительная механика летательных аппаратов: Учебник для вузов. /И.Ф.Образцов, Л.А.Булычев, В.В.Васильев и др.; Под ред. И.Ф.Образцова. -М: Машиностроение, 1986. -536с.
47. Усюкин В.И. Строительная механика конструкций космической техники: Учебник для студентов втузов. -М: Машиностроение, 1988. -392с.
48. Berke L., Khot N.S. Use of optimality criteria method for large scale systems. AGARD Lecture Series, No 70 //Structural Optimization, 1974, pp. 1-29.
49. Nagtegal J.C. A New Approach to Optimal Design of Elastic Structures. //Comp. & Meth. Appl. Mech. Engrg. 1973, v. 2, p. 255-264.
50. Heviland J.K. Aeroelasticity. //Structural Mechanics Computer Programs, 1976, pp. 439-472. 51. Фершинг Г. Основы аэроупругости. /Пер. с нем. К.Ф.Плитта /Под ред. Г.М.Фомина. -
М: Машиностроение, 1984. -600с. 52. Амбарцумян С.А. Теория анизотропных пластин: прочность, устойчивость, колебания.
-М: Наука, 1987. -360с. 53. Лехницкий С.Г. Анизотропные пластинки. -М-Л: Гостехиздат, 1946. -354с. 54. Тимошенко С.П., Войновский-Кригер С. Пластины и оболочки. /Под ред. Шапиро Г.С.
-М: Наука, 1966. -635с. 55. Макеев Е.Г., Пересыпкин В.П. Конечный элемент для моделирования конструкций
типа шпангоутов и лонжеронов./Куйбыш. авиац. ин-т. -Куйбышев, 1978. -39с. -Деп. в ВИНИТИ 21.09.78, 3581-78Деп.