Embed Size (px)
Citation preview

Stanford CS223B Computer Vision, Winter 2005
Lecture 13: Learning Large Environment Models
Sebastian Thrun, Stanford
Rick Szeliski, Microsoft
Hendrik Dahlkamp and Dan Morris, Stanford

Sebastian Thrun Stanford University CS223B Computer Vision
The SLAM Problem
Simultaneous Localization and Mapping Same as: Structure from Motion
– Large environments– Massive occlusion– Hard correspondence problems
Konolige et al, 2001 Teller et al, 2000
Sebastian Thrun Stanford University CS223B Computer Vision
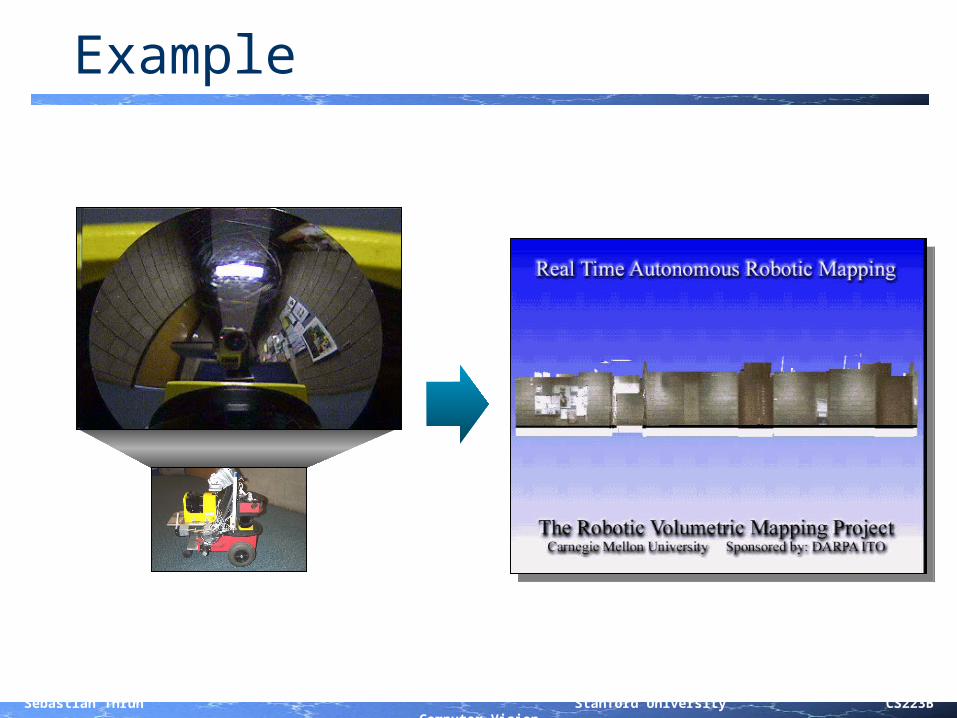
Example

Sebastian Thrun Stanford University CS223B Computer Vision
Mining Accidents…
Somerset County, Quecreek Mine, July, 2002

Sebastian Thrun Stanford University CS223B Computer Vision
Mining Accidents…
Somerset County, Quecreek Mine, July, 2002

Sebastian Thrun Stanford University CS223B Computer Vision
Mine Subsidence Problems
Source: Bureau of Abandoned Mine Reclamation

Sebastian Thrun Stanford University CS223B Computer Vision
Mine Subsidence Problems
Source: Bureau of Abandoned Mine Reclamation

Sebastian Thrun Stanford University CS223B Computer Vision
Course: CMU RI 16-894
with Red Whittaker, Scott Thayer, 10+ students

Sebastian Thrun Stanford University CS223B Computer Vision
The Groundhog Robot
with Red Whittaker, Scott Thayer, 10+ students

Sebastian Thrun Stanford University CS223B Computer Vision
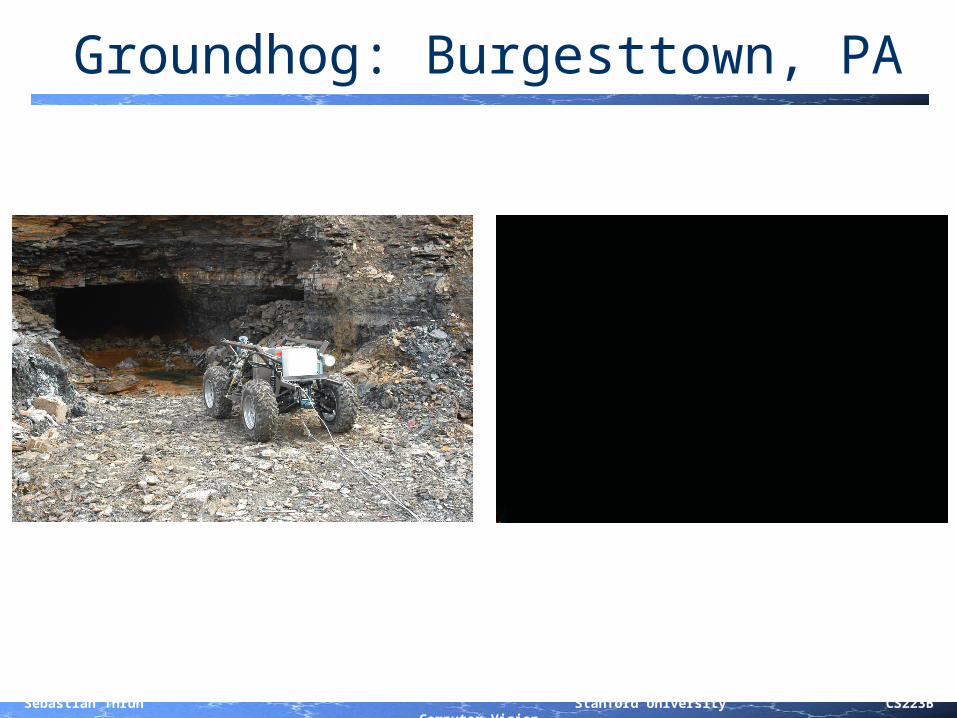
Groundhog: Burgesttown, PA

Sebastian Thrun Stanford University CS223B Computer Vision
Groundhog: Burgesttown, PA
Sebastian Thrun Stanford University CS223B Computer Vision
Groundhog: Burgesttown, PA

Sebastian Thrun Stanford University CS223B Computer Vision
100 Feet In!

Sebastian Thrun Stanford University CS223B Computer Vision
Operator Control Unit

Sebastian Thrun Stanford University CS223B Computer Vision
October 27 is Groundhog Day!

Sebastian Thrun Stanford University CS223B Computer Vision
The Only Mine Map

Sebastian Thrun Stanford University CS223B Computer Vision
The Basic Problem
Mapping Mines– Very large environments,
many cycles
– Volumes, centimeter accuracy
– Real-time
– Autonomous (no communication)
Is instance of: SLAM Problem (Simultaneous Localization and Mapping)
– Hundreds of millions of features
– Massive data association

Sebastian Thrun Stanford University CS223B Computer Vision
The Problem: SLAM
Mapping Mines– Very large environments,
many cycles
– Volumes, centimeter accuracy
– Real-time
– Autonomous (no communication)
Is instance of: SLAM Problem (Simultaneous Localization and Mapping)
– Hundreds of millions of features
– Massive data association
SLAM with Known Map (Localization)
Restriction: Known data association (for now)
Sebastian Thrun Stanford University CS223B Computer Vision
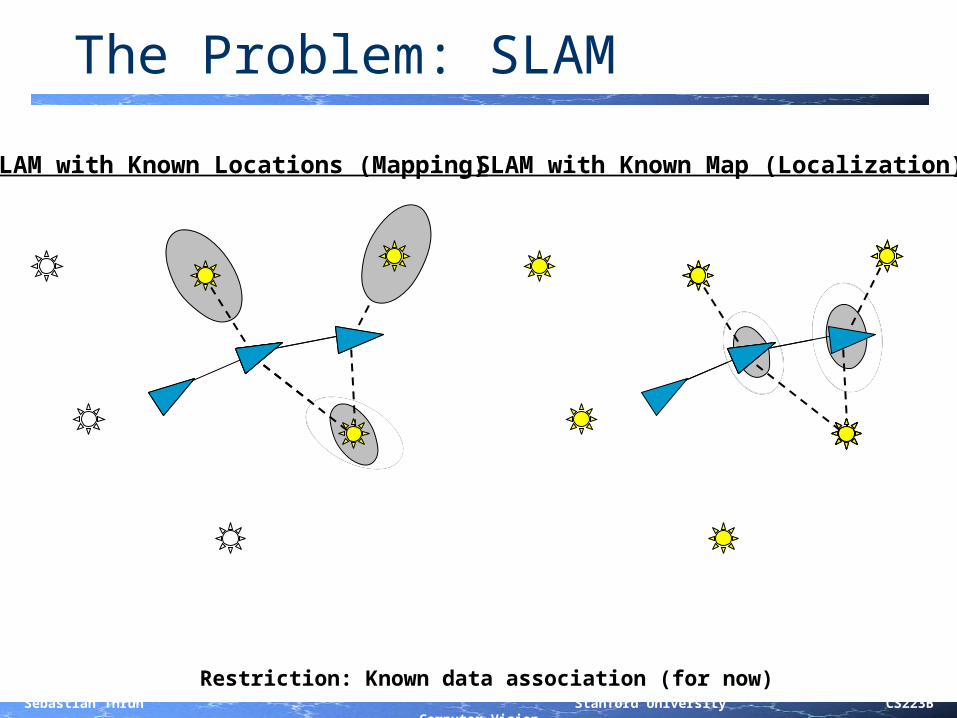
The Problem: SLAM
SLAM with Known Locations (Mapping) SLAM with Known Map (Localization)
Restriction: Known data association (for now)

Sebastian Thrun Stanford University CS223B Computer Vision
The Problem: SLAM
SLAM with Known Locations (Mapping) S L A M
Restriction: Known data association (for now)
Limit

Sebastian Thrun Stanford University CS223B Computer Vision
EKF Solution [Smith/Cheeseman 1986]
S L A M
tttT
ttt mmmp 1
2
1exp)(
t covariance
mt robot pose and features
t expectation
Extended Kalman Filter
Restriction: Known data association (for now)
Limit

Sebastian Thrun Stanford University CS223B Computer Vision
EKF Solution [Smith/Cheeseman 1986]
tttT
ttt mmmp 1
2
1exp)(
t covariance
mt robot pose and features
t expectation
Extended Kalman Filter
Restriction: Known data association (for now)
2
2
2
2
2
2
2
1
11
21
21
21
21
2222221
1111211
,),|(
yxlll
yyxyylylyl
xxyxxlxlxl
lylxllllll
lylxllllll
lylxllllll
Nttt
N
N
N
NNNNNN
N
N
y
x
l
l
l
uzmp

Sebastian Thrun Stanford University CS223B Computer Vision
Classical Solution [Smith/Cheeseman 1986]
Extended Kalman Filter
tttT
ttt mmmp 1
2
1exp)(

Sebastian Thrun Stanford University CS223B Computer Vision
Evolution Robotics

Sebastian Thrun Stanford University CS223B Computer Vision
Maps Acquired by Groundhog25
0 m
eter
s
Sebastian Thrun Stanford University CS223B Computer Vision
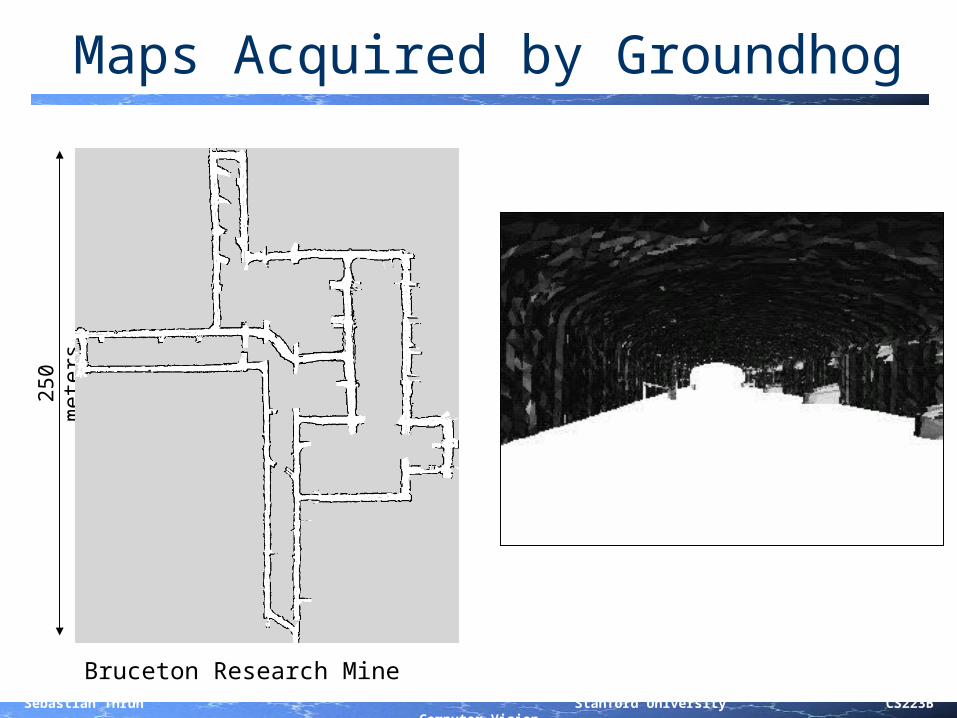
Maps Acquired by Groundhog
Bruceton Research Mine
250
met
ers

Sebastian Thrun Stanford University CS223B Computer Vision
Summary SLAM
Is a Hybrid Tracking Problem– Camera pose (robot)– Large number of environmental features– Large number of data association variables
Solution Kalman Filter (very high dimensional)




























