Embed Size (px)
Citation preview

R7003E - Automatic ControlLesson 9
25 November 2015
1

Introduction of the reference inputMost generic strategy
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
{ x = Ax +Bu
y = Cxplant
˙x = (A −BK −LC) x +Ly +Mr observer
u = −Kx +Nr reference
2

Introduction of the reference input
Dynamics of the plant:
{ x = Ax +Bu
y = Cx
Transfer function:Y (s) = Gu→y(s)U(s)
3

Introduction of the reference inputDynamics of the controller:
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Ly +Mr
u = −Kx +Nr
inputs = y and r
outputs = u
Transfer function(s):
U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)4

Introduction of the reference inputDynamics of the controller:
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Ly +Mr
u = −Kx +Nr
inputs = y and r
outputs = u
Transfer function(s):
U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)4

Introduction of the reference inputDynamics of the controller:
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Ly +Mr
u = −Kx +Nr
inputs = y and r
outputs = u
Transfer function(s):
U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)4

Introduction of the reference input
Transfer functions for the whole system:
⎧⎪⎪⎨⎪⎪⎩Y (s) = Gu→y(s)U(s)U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)
poles = fixed by fixing K and L
zeros = ???
Y (s) = Gu→y(s)U(s)↓Y (s) = Gu→y(s)�Gy→u(s)Y (s) +Gr→u(s)R(s)�
↓�I −Gu→y(s)Gy→u(s)�Y (s) = Gu→y(s)Gr→u(s)R(s)
5

Introduction of the reference input
Transfer functions for the whole system:
⎧⎪⎪⎨⎪⎪⎩Y (s) = Gu→y(s)U(s)U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)
poles = fixed by fixing K and L
zeros = ???
Y (s) = Gu→y(s)U(s)↓Y (s) = Gu→y(s)�Gy→u(s)Y (s) +Gr→u(s)R(s)�
↓�I −Gu→y(s)Gy→u(s)�Y (s) = Gu→y(s)Gr→u(s)R(s)
5

Introduction of the reference input
Transfer functions for the whole system:
⎧⎪⎪⎨⎪⎪⎩Y (s) = Gu→y(s)U(s)U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)
poles = fixed by fixing K and L
zeros = ???
Y (s) = Gu→y(s)U(s)↓Y (s) = Gu→y(s)�Gy→u(s)Y (s) +Gr→u(s)R(s)�
↓�I −Gu→y(s)Gy→u(s)�Y (s) = Gu→y(s)Gr→u(s)R(s)
5

Introduction of the reference input
Transfer functions for the whole system:
⎧⎪⎪⎨⎪⎪⎩Y (s) = Gu→y(s)U(s)U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)
poles = fixed by fixing K and L
zeros = ???
Y (s) = Gu→y(s)U(s)↓Y (s) = Gu→y(s)�Gy→u(s)Y (s) +Gr→u(s)R(s)�
↓�I −Gu→y(s)Gy→u(s)�Y (s) = Gu→y(s)Gr→u(s)R(s)
5

Introduction of the reference input
Transfer functions for the whole system:
⎧⎪⎪⎨⎪⎪⎩Y (s) = Gu→y(s)U(s)U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)
poles = fixed by fixing K and L
zeros = ???
Y (s) = Gu→y(s)U(s)↓Y (s) = Gu→y(s)�Gy→u(s)Y (s) +Gr→u(s)R(s)�
↓�I −Gu→y(s)Gy→u(s)�Y (s) = Gu→y(s)Gr→u(s)R(s)
5

Introduction of the reference input
Transfer functions for the whole system:
⎧⎪⎪⎨⎪⎪⎩Y (s) = Gu→y(s)U(s)U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)
poles = fixed by fixing K and L
zeros = ???
Y (s) = Gu→y(s)U(s)↓Y (s) = Gu→y(s)�Gy→u(s)Y (s) +Gr→u(s)R(s)�
↓�I −Gu→y(s)Gy→u(s)�Y (s) = Gu→y(s)Gr→u(s)R(s)
5

Introduction of the reference input
Y (s) = �I −Gu→y(s)Gy→u(s)�−1Gu→y(s)Gr→u(s)R(s)
= Gy→y(s)Gr→u(s)R(s)Thus
Gr→u(s) = 0 ⇒ Gy→y(s)Gr→u(s) = 0
zeros from r to u are also zeros from r to y
zeros for the closed loop are the zerosfrom r to y and the zeros of the plant
6

Introduction of the reference input
Y (s) = �I −Gu→y(s)Gy→u(s)�−1Gu→y(s)Gr→u(s)R(s)
= Gy→y(s)Gr→u(s)R(s)Thus
Gr→u(s) = 0 ⇒ Gy→y(s)Gr→u(s) = 0
zeros from r to u are also zeros from r to y
zeros for the closed loop are the zerosfrom r to y and the zeros of the plant
6

Introduction of the reference input
Y (s) = �I −Gu→y(s)Gy→u(s)�−1Gu→y(s)Gr→u(s)R(s)
= Gy→y(s)Gr→u(s)R(s)Thus
Gr→u(s) = 0 ⇒ Gy→y(s)Gr→u(s) = 0
zeros from r to u are also zeros from r to y
zeros for the closed loop are the zerosfrom r to y and the zeros of the plant
6

Introduction of the reference input
Y (s) = �I −Gu→y(s)Gy→u(s)�−1Gu→y(s)Gr→u(s)R(s)
= Gy→y(s)Gr→u(s)R(s)Thus
Gr→u(s) = 0 ⇒ Gy→y(s)Gr→u(s) = 0
zeros from r to u are also zeros from r to y
zeros for the closed loop are the zerosfrom r to y and the zeros of the plant
6

Introduction of the reference input
Y (s) = �I −Gu→y(s)Gy→u(s)�−1Gu→y(s)Gr→u(s)R(s)
= Gy→y(s)Gr→u(s)R(s)Thus
Gr→u(s) = 0 ⇒ Gy→y(s)Gr→u(s) = 0
zeros from r to u are also zeros from r to y
zeros for the closed loop are the zerosfrom r to y and the zeros of the plant
6

Introduction of the reference input
zeros from r to u are also zeros from r to y
I.e., we are interested only in r → u!!
7

Introduction of the reference inputWe are interested only in r → u!!
U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)↧
U(s) = Gr→u(s)R(s)Dynamics of the controller:
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Ly +Mr
u = −Kx +Nr
↧⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Mr
u = −Kx +Nr
8

Introduction of the reference inputWe are interested only in r → u!!
U(s) = Gy→u(s)Y (s) +Gr→u(s)R(s)↧
U(s) = Gr→u(s)R(s)Dynamics of the controller:
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Ly +Mr
u = −Kx +Nr
↧⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Mr
u = −Kx +Nr
8

Introduction of the reference inputWhat are the zeros of the controller?
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Mr
u = −Kx +Nr
Transfer function:
Gr→u(s) =det �sI − (A −BK −LC) −M−K N
�det �sI − (A −BK −LC)�
9

Introduction of the reference inputWhat are the zeros of the controller?
det �sI − (A −BK −LC) −M−K N� = 0
⇓det⎡⎢⎢⎢⎢⎣sI − (A −BK −LC) −M
N−K 1
⎤⎥⎥⎥⎥⎦ = 0
⇓det⎡⎢⎢⎢⎢⎣sI − (A −BK −LC) − M
NK −M
N0 1
⎤⎥⎥⎥⎥⎦ = 0
⇓det �sI − (A −BK −LC) − M
NK� = 0
10

Introduction of the reference inputWhat are the zeros of the controller?
det �sI − (A −BK −LC) −M−K N� = 0
⇓det⎡⎢⎢⎢⎢⎣sI − (A −BK −LC) −M
N−K 1
⎤⎥⎥⎥⎥⎦ = 0
⇓det⎡⎢⎢⎢⎢⎣sI − (A −BK −LC) − M
NK −M
N0 1
⎤⎥⎥⎥⎥⎦ = 0
⇓det �sI − (A −BK −LC) − M
NK� = 0
10

Introduction of the reference inputWhat are the zeros of the controller?
det �sI − (A −BK −LC) −M−K N� = 0
⇓det⎡⎢⎢⎢⎢⎣sI − (A −BK −LC) −M
N−K 1
⎤⎥⎥⎥⎥⎦ = 0
⇓det⎡⎢⎢⎢⎢⎣sI − (A −BK −LC) − M
NK −M
N0 1
⎤⎥⎥⎥⎥⎦ = 0
⇓det �sI − (A −BK −LC) − M
NK� = 0
10

Introduction of the reference inputWhat are the zeros of the controller?
det �sI − (A −BK −LC) −M−K N� = 0
⇓det⎡⎢⎢⎢⎢⎣sI − (A −BK −LC) −M
N−K 1
⎤⎥⎥⎥⎥⎦ = 0
⇓det⎡⎢⎢⎢⎢⎣sI − (A −BK −LC) − M
NK −M
N0 1
⎤⎥⎥⎥⎥⎦ = 0
⇓det �sI − (A −BK −LC) − M
NK� = 0
10

Introduction of the reference inputHow do we design the zeros of the controller?
det �sI − (A −BK −LC) − M
NK� = 0
designing M
N= same problem as
choosing L for designing an observer
⇒ use acker!
How do we select αzeros(s)? → Chapters 3 and 4
11

Introduction of the reference inputHow do we design the zeros of the controller?
det �sI − (A −BK −LC) − M
NK� = 0
designing M
N= same problem as
choosing L for designing an observer
⇒ use acker!
How do we select αzeros(s)? → Chapters 3 and 4
11

Introduction of the reference inputHow do we design the zeros of the controller?
det �sI − (A −BK −LC) − M
NK� = 0
designing M
N= same problem as
choosing L for designing an observer
⇒ use acker!
How do we select αzeros(s)? → Chapters 3 and 4
11

Introduction of the reference inputHow do we design the zeros of the controller?
designing M
Nplaces the closed loop zeros in
det �sI − (A −BK −LC) − M
NK� b(s) = 0,
but what about the gain of the closed loop system?12

Introduction of the reference inputHow do we design the zeros of the controller?
controller zeros: det �sI − (A −BK −LC) − M
NK� = 0
How do we select N , when M
Nhas already been selected? → must
ensure the closed loop gain to be 1
System equations:
⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
�x˙x� = �A −BK BK
0 A −LC� �x
x� + � B
B −M�Nr
y = �C 0� �xx�
13

Introduction of the reference inputHow do we design the zeros of the controller?
controller zeros: det �sI − (A −BK −LC) − M
NK� = 0
How do we select N , when M
Nhas already been selected? → must
ensure the closed loop gain to be 1
System equations:
⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
�x˙x� = �A −BK BK
0 A −LC� �x
x� + � B
B −M�Nr
y = �C 0� �xx�
13

Introduction of the reference inputHow do we design the zeros of the controller?
System equations:⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
�x˙x� = �A −BK BK
0 A −LC� �x
x� + � B
B −M�Nr
y = �C 0� �xx�
DC gain = closed loop TF (s = 0)
Algorithm:
��C 0���0 ⋅ I − �A −BK BK
0 A −LC��−1 �� B
B −M�N� = 1
14

Introduction of the reference inputHow do we design the zeros of the controller?
System equations:⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
�x˙x� = �A −BK BK
0 A −LC� �x
x� + � B
B −M�Nr
y = �C 0� �xx�
DC gain = closed loop TF (s = 0)
Algorithm:
��C 0���0 ⋅ I − �A −BK BK
0 A −LC��−1 �� B
B −M�N� = 1
14

Introduction of the reference inputHow do we design the zeros of the controller?
System equations:⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
�x˙x� = �A −BK BK
0 A −LC� �x
x� + � B
B −M�Nr
y = �C 0� �xx�
DC gain = closed loop TF (s = 0)
Algorithm:
��C 0���0 ⋅ I − �A −BK BK
0 A −LC��−1 �� B
B −M�N� = 1
14

?
15

Introduction of the reference input
are we finished?
yes no
need to talk about some practical cases
16

Introduction of the reference input
are we finished?
yes no
need to talk about some practical cases
16

Introduction of the reference input
what are the dynamics of x = x − x?
{ x = Ax +Bu
y = Cxplant
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Ly +Mr
u = −Kx +Nrcontroller
⇒ ˙x = x − ˙x
= Ax −BKx +BNr−Ax +BKx +LCx −LCx −Mr
= (A −LC) x + (BN −M) r17

Introduction of the reference input
what are the dynamics of x = x − x?
{ x = Ax +Bu
y = Cxplant
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Ly +Mr
u = −Kx +Nrcontroller
⇒ ˙x = x − ˙x
= Ax −BKx +BNr−Ax +BKx +LCx −LCx −Mr
= (A −LC) x + (BN −M) r17

Introduction of the reference input
what are the dynamics of x = x − x?
{ x = Ax +Bu
y = Cxplant
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Ly +Mr
u = −Kx +Nrcontroller
⇒ ˙x = x − ˙x
= Ax −BKx +BNr−Ax +BKx +LCx −LCx −Mr
= (A −LC) x + (BN −M) r17

Introduction of the reference input
what are the dynamics of x = x − x?
{ x = Ax +Bu
y = Cxplant
⎧⎪⎪⎨⎪⎪⎩˙x = (A −BK −LC) x +Ly +Mr
u = −Kx +Nrcontroller
⇒ ˙x = x − ˙x
= Ax −BKx +BNr−Ax +BKx +LCx −LCx −Mr
= (A −LC) x + (BN −M) r17

Introduction of the reference inputPractical case 1
˙x = (A −LC) x + (BN −M) r
we may want the dynamics of the error to be independent of r
(intuition: x should be free from external excitations)
18

Introduction of the reference inputPractical case 1
˙x = (A −LC) x + (BN −M) r
we may want the dynamics of the error to be independent of r
(intuition: x should be free from external excitations)
18

Introduction of the reference inputPractical case 1
Dynamics of the error independent of r implies˙x = (A −LC) x + (BN −M) r
⇓M = BN
19

Introduction of the reference inputPractical case 1
What happens to the controller zeros when M = BN?
det �sI − (A −BK −LC) − M
NK� = 0
↧det �sI − (A −LC)� = 0
20

Introduction of the reference inputPractical case 1
What happens to the controller zeros when M = BN?
det �sI − (A −BK −LC) − M
NK� = 0
↧det �sI − (A −LC)� = 0
20

Introduction of the reference inputPractical case 1
Closed loop zeros:
det �sI − (A −LC)� b(s) = 0
Closed loop poles (principle of separation):
det �sI − (A −LC)�det �sI − (A −BK)� = 0
⇒ cancellations!21

Introduction of the reference inputPractical case 2
˙x = (A −LC) x + (BN −M) r
sometimes we do not have y and r but only y − r
(examples: radars, thermostats, . . . )
22

Introduction of the reference inputPractical case 2
˙x = (A −LC) x + (BN −M) r
sometimes we do not have y and r but only y − r
(examples: radars, thermostats, . . . )
22

Introduction of the reference inputPractical case 2
˙x = (A −BK −LC) x +L(y − r)⇓
M = −L N = 0
23

Introduction of the reference inputPractical case 2
What happens to the controller zeros when M = −L, N = 0?
det �sI − (A −BK −LC) −M−K N� = 0 ↦ det �sI − (A −BK −LC) L−K 0� = 0
↦ det �sI −A L−K 0� = 0
24

Introduction of the reference inputPractical case 2
open loop zeros: det �sI −A −B
C D� = b(s) = 0
closed loop zeros: det �sI −A L−K 0� b(s) = 0
25

Introduction of the reference inputSummary
Closed loop transfer function:
G(s) = Y (s)R(s) =K
γ(s)b(s)αc(s)αe(s)
αc(s) = det [sI −A +BK] = controller polesαe(s) = det [sI −A +LC] = estimator poles
γ(s) = det �sI − (A −BK −LC) − M
NK� = reference zeros
b(s) = plant zerosK = overall gain (usually = 1)
26

?
27

summary of what has been done up to now
28

Integral control and robust tracking
To be controlled system:
{ x = Ax +Bu
y = Cx
Control design workflow:1 design the controller K
2 design the estimator L
3 design the reference M, N
4 ensure that the gain from r to y is 1
is this robust?
29

Integral control and robust tracking
To be controlled system:
{ x = Ax +Bu
y = Cx
Control design workflow:1 design the controller K
2 design the estimator L
3 design the reference M, N
4 ensure that the gain from r to y is 1
is this robust?
29

Integral control and robust tracking
if
{ x = Ax +Bu +B1w
y = Cx
then doing as before does not en-sure the gain from r to y to be 1!
30

Integral control and robust tracking
Assumptions
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
{ x = Ax +Bu +B1w
y = Cxperturbed plant
r + α1r + α2r = 0 reference
w + α1w + α2w = 0 disturbance
? = r0 ≠ w0 =? unknown initial conditions
Control requirementse ∶= y − r should be s.t. lim
t→+∞ e(t) = 0 even under not preciseknowledge of (A, B, C)
31

Integral control and robust tracking
Assumptions
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
{ x = Ax +Bu +B1w
y = Cxperturbed plant
r + α1r + α2r = 0 reference
w + α1w + α2w = 0 disturbance
? = r0 ≠ w0 =? unknown initial conditions
Control requirementse ∶= y − r should be s.t. lim
t→+∞ e(t) = 0 even under not preciseknowledge of (A, B, C)
31

Integral control and robust trackingExamples of what can be modeled with w + α1w + α2w = 0
w = 0⇒ step disturbance
w = 0⇒ ramp disturbance
w +w = 0⇒ sinusoidal disturbance
32

Integral control and robust trackingWorkflow
1 rewrite the state equations
{ x = Ax +Bu
y = Cx
so to include the dynamics of e = y − r
2 find a controller for the novel state equations
3 rephrase this controller in terms of the original state equations
33

Integral control and robust tracking
r + α1r + α2r = 0 ” + ” e = y − r
⇓e + α1e + α2e = y + α1y + α2y
= Cx +Cα1x +Cα2x
= C (x + α1x + α2x)= Cξ
we choose ξ as a new state ⇒ must compute ξ
34

Integral control and robust tracking
r + α1r + α2r = 0 ” + ” e = y − r
⇓e + α1e + α2e = y + α1y + α2y
= Cx +Cα1x +Cα2x
= C (x + α1x + α2x)= Cξ
we choose ξ as a new state ⇒ must compute ξ
34

Integral control and robust tracking
r + α1r + α2r = 0 ” + ” e = y − r
⇓e + α1e + α2e = y + α1y + α2y
= Cx +Cα1x +Cα2x
= C (x + α1x + α2x)= Cξ
we choose ξ as a new state ⇒ must compute ξ
34

Integral control and robust tracking
r + α1r + α2r = 0 ” + ” e = y − r
⇓e + α1e + α2e = y + α1y + α2y
= Cx +Cα1x +Cα2x
= C (x + α1x + α2x)= Cξ
we choose ξ as a new state ⇒ must compute ξ
34

Integral control and robust tracking
r + α1r + α2r = 0 ” + ” e = y − r
⇓e + α1e + α2e = y + α1y + α2y
= Cx +Cα1x +Cα2x
= C (x + α1x + α2x)= Cξ
we choose ξ as a new state ⇒ must compute ξ
34

Integral control and robust tracking
r + α1r + α2r = 0 ” + ” e = y − r
⇓e + α1e + α2e = y + α1y + α2y
= Cx +Cα1x +Cα2x
= C (x + α1x + α2x)= Cξ
we choose ξ as a new state ⇒ must compute ξ
34

Immediately:ξ ∶= x + α1x + α2x
⇓ξ = ...
x + α1x + α2x
From the original system:x = Ax +Bu +B1w
x = Ax +Bu +B1w...x = Ax +Bu +B1w
Thusξ = ...
x + α1x + α2x
= (Ax +Bu +B1w)+ α1 (Ax +Bu +B1w)+ α2 (Ax +Bu +B1w)= Aξ +B (u + α1u + α2u) + 0
indeed w + α1w + α2w = 0 by assumption!35

Immediately:ξ ∶= x + α1x + α2x
⇓ξ = ...
x + α1x + α2x
From the original system:x = Ax +Bu +B1w
x = Ax +Bu +B1w...x = Ax +Bu +B1w
Thusξ = ...
x + α1x + α2x
= (Ax +Bu +B1w)+ α1 (Ax +Bu +B1w)+ α2 (Ax +Bu +B1w)= Aξ +B (u + α1u + α2u) + 0
indeed w + α1w + α2w = 0 by assumption!35

Immediately:ξ ∶= x + α1x + α2x
⇓ξ = ...
x + α1x + α2x
From the original system:x = Ax +Bu +B1w
x = Ax +Bu +B1w...x = Ax +Bu +B1w
Thusξ = ...
x + α1x + α2x
= (Ax +Bu +B1w)+ α1 (Ax +Bu +B1w)+ α2 (Ax +Bu +B1w)= Aξ +B (u + α1u + α2u) + 0
indeed w + α1w + α2w = 0 by assumption!35

Immediately:ξ ∶= x + α1x + α2x
⇓ξ = ...
x + α1x + α2x
From the original system:x = Ax +Bu +B1w
x = Ax +Bu +B1w...x = Ax +Bu +B1w
Thusξ = ...
x + α1x + α2x
= (Ax +Bu +B1w)+ α1 (Ax +Bu +B1w)+ α2 (Ax +Bu +B1w)= Aξ +B (u + α1u + α2u) + 0
indeed w + α1w + α2w = 0 by assumption!35

Immediately:ξ ∶= x + α1x + α2x
⇓ξ = ...
x + α1x + α2x
From the original system:x = Ax +Bu +B1w
x = Ax +Bu +B1w...x = Ax +Bu +B1w
Thusξ = ...
x + α1x + α2x
= (Ax +Bu +B1w)+ α1 (Ax +Bu +B1w)+ α2 (Ax +Bu +B1w)= Aξ +B (u + α1u + α2u) + 0
indeed w + α1w + α2w = 0 by assumption!35

New definition:µ ∶= u + α1u + α2u
Thusξ = Aξ +B (u + α1u + α2u) = Aξ +Bµ
Summary of the equations:ξ = Aξ +Bµ
e + α1e + α2e = Cξ
⇒⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦=⎡⎢⎢⎢⎢⎢⎢⎣
0 1 0−α2 −α1 C
0 0 A
⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦+⎡⎢⎢⎢⎢⎢⎢⎣
00B
⎤⎥⎥⎥⎥⎥⎥⎦µ ↦ z = Aez +Beµ
(Ae, Be) ∶= error system
36

New definition:µ ∶= u + α1u + α2u
Thusξ = Aξ +B (u + α1u + α2u) = Aξ +Bµ
Summary of the equations:ξ = Aξ +Bµ
e + α1e + α2e = Cξ
⇒⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦=⎡⎢⎢⎢⎢⎢⎢⎣
0 1 0−α2 −α1 C
0 0 A
⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦+⎡⎢⎢⎢⎢⎢⎢⎣
00B
⎤⎥⎥⎥⎥⎥⎥⎦µ ↦ z = Aez +Beµ
(Ae, Be) ∶= error system
36

New definition:µ ∶= u + α1u + α2u
Thusξ = Aξ +B (u + α1u + α2u) = Aξ +Bµ
Summary of the equations:ξ = Aξ +Bµ
e + α1e + α2e = Cξ
⇒⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦=⎡⎢⎢⎢⎢⎢⎢⎣
0 1 0−α2 −α1 C
0 0 A
⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦+⎡⎢⎢⎢⎢⎢⎢⎣
00B
⎤⎥⎥⎥⎥⎥⎥⎦µ ↦ z = Aez +Beµ
(Ae, Be) ∶= error system
36

New definition:µ ∶= u + α1u + α2u
Thusξ = Aξ +B (u + α1u + α2u) = Aξ +Bµ
Summary of the equations:ξ = Aξ +Bµ
e + α1e + α2e = Cξ
⇒⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦=⎡⎢⎢⎢⎢⎢⎢⎣
0 1 0−α2 −α1 C
0 0 A
⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦+⎡⎢⎢⎢⎢⎢⎢⎣
00B
⎤⎥⎥⎥⎥⎥⎥⎦µ ↦ z = Aez +Beµ
(Ae, Be) ∶= error system
36

Integral control and robust tracking
Fact: if the roots of s2 + α1s + α2 are not zeros of (A, B, C, 0)then (Ae, Be) is fully controllable
Important:
(Ae, Be) fully controllable
⇓∃Ke = �K2 K1 K0� s.t.(Ae −BeKe) has arbitrary dynamics
through the feedback µ = −Kez
37

Integral control and robust tracking
how do we go back to x and u from (Ae, Be) and Ke?
µ = −Kez = −�K2 K1 K0�⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦= −K2e −K1e −K0ξ
Old definitions:
µ ∶= u + α1u + α2u ξ ∶= x + α1x + α2x
Thus
u + α1u + α2u = −K2e −K1e −K0x − α1K0x − α2K0x≡(u +K0x) + α1 (u +K0x) + α2 (u +K0x) = −K2e −K1e
38

Integral control and robust tracking
how do we go back to x and u from (Ae, Be) and Ke?
µ = −Kez = −�K2 K1 K0�⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦= −K2e −K1e −K0ξ
Old definitions:
µ ∶= u + α1u + α2u ξ ∶= x + α1x + α2x
Thus
u + α1u + α2u = −K2e −K1e −K0x − α1K0x − α2K0x≡(u +K0x) + α1 (u +K0x) + α2 (u +K0x) = −K2e −K1e
38

Integral control and robust tracking
how do we go back to x and u from (Ae, Be) and Ke?
µ = −Kez = −�K2 K1 K0�⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦= −K2e −K1e −K0ξ
Old definitions:
µ ∶= u + α1u + α2u ξ ∶= x + α1x + α2x
Thus
u + α1u + α2u = −K2e −K1e −K0x − α1K0x − α2K0x≡(u +K0x) + α1 (u +K0x) + α2 (u +K0x) = −K2e −K1e
38

Integral control and robust tracking
how do we go back to x and u from (Ae, Be) and Ke?
µ = −Kez = −�K2 K1 K0�⎡⎢⎢⎢⎢⎢⎢⎣e
e
ξ
⎤⎥⎥⎥⎥⎥⎥⎦= −K2e −K1e −K0ξ
Old definitions:
µ ∶= u + α1u + α2u ξ ∶= x + α1x + α2x
Thus
u + α1u + α2u = −K2e −K1e −K0x − α1K0x − α2K0x≡(u +K0x) + α1 (u +K0x) + α2 (u +K0x) = −K2e −K1e
38

Integral control and robust tracking
How to implement
(u +K0x) + α1 (u +K0x) + α2 (u +K0x) = −K2e −K1e ?
integrate!
(u +K0x) + α1 �1s
u + K0s
x� + α2 � 1s2 u + K0
s2 x� = −K2s2 e − K1
se
≡�1 + α1
s+ α2
s2 �u +K0 �1 + α1s+ α2
s2 �x = −�K1s+ K2
s2 � e
39

Integral control and robust tracking
How to implement
(u +K0x) + α1 (u +K0x) + α2 (u +K0x) = −K2e −K1e ?
integrate!
(u +K0x) + α1 �1s
u + K0s
x� + α2 � 1s2 u + K0
s2 x� = −K2s2 e − K1
se
≡�1 + α1
s+ α2
s2 �u +K0 �1 + α1s+ α2
s2 �x = −�K1s+ K2
s2 � e
39

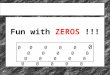
Integral control and robust trackingBlock schematic implementation
�1 + α1s+ α2
s2 �u +K0 �1 + α1s+ α2
s2 �x = −�K1s+ K2
s2 � e
40

Integral control and robust trackingPractical example: constant disturbance
r = 0 ⇒ u +K0x = −K1s
e
41

?
42

Table of Contents
1 Introduction of the reference input
2 Summary
3 Integral control and robust tracking – 7.10
43