Embed Size (px)
Citation preview

T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Exercises for the Power System Stability Training Material
- Exercises -

- 2 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
DIgSILENT Seminar
Analysing Power System Stability with PowerFactory
The purposes of these exercises are to introduce the basic methods of the analysis of different phenomena of stability occurring in power systems. Furthermore the calculation functions and various available tools of the PowerFactory program are introduced during the exercises, which will enable you to get acquainted with the methods of the stability analysis, visualization and interpretation of the results. The instructions in the exercises are brief on purpose. It is the intention that you try to work out yourself how to perform a certain task. However references to more detailed instructions are given as [n], where 'n' is the number under which you'll find these instructions in the appendix. You can also use them after the training to repeat the exercises on you own. During the exercises there will be two supervisors, who will support and help you with your tasks of the exercise. Additionally they can provide answers to general questions regarding the topic of the training or different problems from your own practice. Please do not hesitate to address the supervisors at any time to any topic! We wish good success! Exercise 1: One-Machine Problem in PowerFactory
Start-up PowerFactory with your (training) user name and create a new project “PF Stability” [1] or similar. You can leave the name of the grid as it is or change it. Before starting to create the network in the single-line graphic, we have to build up the library including the different types with the electrical data of the devices. This is necessary before entering the elements into the network.
Input data for the types: • In the following tables the electrical data for a overhead line type, a 2-winding transformer
type and a generator type are shown. These shall be inserted into the local library of the active project, and they are used when inputting the elements of the system [2].
Line ‘Type CCT’:
Un 500 kV Irated 1 kA X’ 0.56306 Ohm/km

- 3 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Transformer ‘Trf 500kV/24kV/2220MVA’:
Sn 2220 MVA UnHV 500 kV UnLV 24 kV Xshc 15 %
Generator ‘Gen 2220MVA/24kV’:
Basic Data: Sn 2220 MVA Un 24 kV cosn 1 RMS/EMT-Simulation: Tag 7 s rstr 0.003 p.u. xl 0.15 p.u. xrl 0 xd 1.81 p.u. xd’ 0.3 p.u. xd’’ 0.23 p.u. xq 1.76 p.u. xq’ 0.65 p.u. xq’’ 0.25 p.u. Td’ 1.325967 s Td’’ 0.023 s Tq’ 0.3693182 s Tq’’ 0.02692308 s Main Flux Saturation: SG10 0.12396 p.u. SG12 0.177575 p.u.
Input the elements in the single-line graphic: • Setup the case according to the single line diagram below. Insert the elements with the data
given in the figure [5]. • Additional load-flow data is shown in the following:
- The voltage magnitude of the voltage source is set to: 0.90081 p.u. - The generator is set to a constant PQ type. - The generator dispatch is set to S = 2220MVA and a power factor of 0.9

- 4 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
DIgSILENT
PowerFactory 13.1.252
Exercise 1
Power System Stability and Control One Machine Problem
Project: PF Seminar Graphic: Grid Date: 11/11/2004 Annex:
G1
Gen
222
0MV
A/2
4kV
1998
.00
967.
6853
.41
G ~
TrfTrf 500kV/24kV/2220MVA
-199
8.00
-634
.64
2.56
1998
.00
967.
6853
.41
1998
.00
967.
6853
.41
CCT1 Type CCT
100. km
-129
9.40
56.7
91.
67
1299
.40
412.
741.
67
1299
.40
412.
741.
67
CCT2 Type CCT
186. km
-698
.60
30.5
30.
90
698.
6022
1.90
0.90
698.
6022
1.90
0.90
Infin
ite S
ourc
e
-199
8.00
87.3
22.
56V~
LV
24. k
V24
.00
1.00
28.3
4
HV
50
0. k
V47
2.13
0.94
20.1
2
Infin
ite B
us
500.
kV
450.
410.
900.
00
DIg
SILE
NT
Figure 1: Single Line Graphic of the Network
Short-circuit simulation at bus HV: Simulate a short-circuit at busbar ‘HV’ with a duration of 110ms and visualize [6]: • Generator Active Power • Generator Reactive Power • Generator Current • Generator rotor angle (with reference to reference bus voltage) • Voltage at Bus Bar HT and LT • Display the P-phi diagram of the run [7] Therefore you have first to define the variables for the generator and the busbars/terminals you want to look at in the simulation [8]. Then you have to define two events on the busbar ‘HV’, where the short-circuit is initiated (at 0 s) and cleared again (at 110 ms) [9]. Determine the critical fault clearing time of the system.

- 5 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Short-circuit simulation on line CCT2: Simulate a short-circuit in the middle (50%) of the overhead line ‘CCT2’ with a duration of 100ms. Clear the fault by opening the line. Determine the critical fault clearing time. Additionally you can check the current through the line CCT1 and CCT2 during the simulation, as well as the speed of the synchronous generator. Simulate a short-circuit in the end (99.999%) of the overhead line ‘CCT2’ with a duration of 100ms. Clear the fault by tripping the line as mentioned above. Determine the critical fault clearing time again. Compare the results and the critical fault clearing time of these cases with the case of a short-circuit directly on the bus ‘HV’.
Exercise 2: Small Signal Stability in the One-Machine System
Before running the Eigenvalue Analysis we want to investigate the one-machine system using the transient simulation function used in Exercise 1. So first a small disturbance is introduced into the system and the response of the machine will be analysed. Therefore please put all events in your project out of service.
Introducing a small disturbance: • Insert an event into the event list, which is increasing the torque at t=0s by 0.01 p.u. Use a
“Event of a Synchronous Machine” to add additional torque [10]. • Reduce the electric torque of the generator ‘G1’ again to the pre-disturbance value. • Observe the speed of the generator in a subplot. • Determine the frequency and damping of the oscillation of the speed signal.
• Now switch off the line ‘CCT2’ and investigate the differences in the generator speed
oscillation. Instead of investigating the system using time domain simulations, now the small signal stability is analysed with the ‘Modal Analysis’ function in PowerFactory. I.e. the eigenvalues of the system are calculated and the eigenfrequencies of modes and their damping is shown.

- 6 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Modal Analysis: • Run a load-flow calculation and calculate the initial conditions. • Run the modal analysis and calculate all eigenvalues for the generator speed [11]. • Output all results of the eigenvalue analysis in the output window. Hereby first investigate the
results with only the eigenvalues, and then including the detailed information about the participation factors [12].
• Compare the results of the time domain simulation and of the modal analysis for both
described case. Exercise 3: Voltage Stability
Now the voltage stability of the one-machine system is to be analysed. This can be done by using voltage-reactive power (V-Q) curves or active power-voltage (P-V) curves. To automatically go through the system and change the parameters, we provide to scripts for calculating the important values and visualizing these voltage stability curves.
V-Q-curves: • First deactivate your project [3]. • Import the file named ‘V-Q-Curve.dz’ directly into the study case [13]. • Activate the project again.
• Now change the voltage setpoint for the infinite busbar to 1p.u. • Before running the DPL script, you have first to define a ‘DPL command set’ with the
generator ‘G1’ and the terminal ‘LV’ [14]. • Then open the dialog of the DPL script ‘V-Q-Curve’ and select the ‘DPL command set’ as the
general selection [15]. • Now enter the voltage range to be investigated:
- maximum voltage at ‘LV’ - minimum voltage at ‘LV’ - voltage step of the simulation
• And the active power output of the generator to produce different V-Q-curves: - maximum active power of ‘G1’ - minimum active power of ‘G1’ - active power step of the simulation
Now the script will automatically show a number of V-Q-curves according to the number of active power steps you defined. It is also possible to show all curves in one X-Y plot. Also see that the script set the generator from controlling P and Q to controlling the active power and the voltage at ‘LV’.

- 7 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
P-V-curves: For visualizing the P-V curves we have first to import another DPL script and change network to some extent. So it would be best to save your project on your hard disk or to make a new revision in the project. • First deactivate your project [3]. • Import the file named ‘P-V-Curve.dz’ directly into the study case [13]. • Activate the project again.
• To analyse the P-V characteristic the generator has to be put out of service and a load ‘Load’
should be connected at the terminal ‘LV’ with a active power consumption and a constant power factor.
• Define a ‘DPL command set’ with the load ‘Load’ and the terminal ‘LV’ [14]. • Then open the dialog of the DPL script ‘P-V-Curve’ and select the ‘DPL command set’ as the
general selection [15]. • Now enter the initial scaling factor for the load depending on the active power you entered for
the load. Furthermore the power factor of the load can be specified and whether it is capacitive or inductive
• See the differences in the curve and in the maximum transmitted power using various values of the power factor.
Improving Voltage Stability: Add in turns the following elements at the load bus bar and analyse the effects on the P-V-curves and on the stability limit. • Fixed capacitive shunt • Switched capacitive shunt • Static Var Compensator/System (SVC)

- 8 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Exercise 4: Built-in Excitation System
Now into the project there are to be included a voltage controller (AVR) and a power system stabilizer (PSS). So the control of the generator is no longer neglected but has an influence in the behaviour of the generator and thus in the stability of the investigated system. AVR: A voltage controller is created and the step response of the generator system is analysed (closed-loop response).
• Create a new “Composite Model” and a new “Common-Model” inside the “Grid” folder in the data manager [16]. Therefore right-click the generator and select “Define -> Voltage Controller (vco)”
• Select the Block-Diagram “vco_EXAC1A” from the standard IEEE-Library in the global library of PowerFactory [16].
• The Frame “IEEE-frame no droop” from the standard IEEE-Library in the global library of PowerFactory is automatically selected.
• Enter the name and the parameters of the voltage controller according to the table on the next page.
• Calculate a load-flow and the initial conditions to check your project for errors.
Verify the model by a step-response (closed-loop) test on the voltage setpoint:
• Test the model with a step response to the input voltage “usetp” (closed-loop test) [17] • To check the setup of the controller, show the block diagram of the controller [19]. • Define a variable set to monitor for the AVR element and visualize the results of the simulated
step response [18]. • You may make changes to the parameters in the variable set for the AVR and analyse the
differences in the response • Visualize the results of the simulated step response [18].

- 9 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
AVR Settings for the ‘vco_EXAC1A’:
--------------------------------------------------------------------------------
| | DIgSILENT | Project: |
| | PowerFactory |-------------------------------
| | 13.0.252 | Date: 11/11/2011 |
--------------------------------------------------------------------------------
|Grid:Grid Syst.Stage:Grid | Annex: / 1 |
--------------------------------------------------------------------------------
|AVR G1 Common Model 1 /1 |
--------------------------------------------------------------------------------
|Model Definition \Library\Models\IEEE\Models\vco_EXAC1A |
|Out of Service No |
| Parameter |
| Tr Measurement Delay [s] 0.0000 |
| Tb Filter Delay Time [s] 1.0000 |
| Tc Filter Derivative Time Constant [s] 1.0000 |
| Ka Controller Gain [p.u.] 500.0000 |
| Ta Controller Time Constant [s] 0.2000 |
| Te Excitor Time Constant [s] 0.0100 |
| Kf Stabilization Path Gain [p.u.] 0.0300 |
| Tf Stabilization Path Delay Time [s] 1.0000 |
| Kc Excitor Current Compensation Factor [p.u.] 0.3470 |
| Kd Excitor Current Derivative Factor [p.u.] 0.0500 |
| Ke Excitor Constant [p.u.] 1.0000 |
| E1 Saturation Factor 1 [p.u.] 7.4025 |
| Se1 Saturation Factor 2 [p.u.] 0.2416 |
| E2 Saturation Factor 3 [p.u.] 9.8700 |
| Se2 Saturation Factor 4 [p.u.] 1.5373 |
| Vrmin Controller Minimum Output [p.u.] -10.0000 |
| Vrmax Controller Maximum Output [p.u.] 10.0000 |
| |
--------------------------------------------------------------------------------

- 1 0 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Vr
Fex
Vf
uerrs
..
yiue
rrs
O
cure
x
Vfe
o18
KeSe
Ve
yi3
yi1
upss
uset
p
o12
Vc
u
Vs
--
-
K Kd
Se(
efd)
+Ke
Ke,E
1,Se1
,E2,.
.
sK/(1
+sT)
Kf,T
f
[1/s
TTe
_{K/
(1+s
T)}_
Ka,
Ta
Vrm
in
Vrm
ax
(1+s
Tb)/(
1+sT
a)Tb
,Tc
_Fex
_K
c
0 1
1/(1
+sT)
Tr
vco_
EX
AC
1A: I
EE
E M
odifi
ed T
ype
AC
1 E
xcita
tion
Sys
tem
10 2 3
DIgSILENT
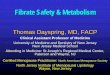
Figure 2: Block Diagram of the vco_EXAC1A voltage controller

- 1 1 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Now the influence of the AVR is to be analysed on the small and large signal stability of the one-machine problem. Therefore put the frame model and the AVR into service.
• Simulate the disturbances introduced in Exercise 1: • Short-circuit at the busbar ‘HV’ • Short-circuit in the middle (50%) of the overhead line ‘CCT2’. Clear the fault by tripping
the line as mentioned above.
• Determine the critical fault clearing time for both cases.
• Compare the results and the critical fault clearing times of these cases with the case of a short-circuit directly on the bus ‘HV’.
• Execute a ‘Modal Analysis’ for the system with AVR. • Output the eigenvalues as well as the damping and eigenfrequency and analyse the
differences. PSS: After we analysed the operation of the generator combined with an AVR, now the system should be stabilized using also a power system stabilizer. The PSS is connected into the frame of the generator and the closed-loop response can be simulated.
• Create a new controller model for the power system stabilizer in the existing composite model [16]. Therefore right-click the generator and select “Define -> Power System Stabilizer (pss)”. The reference inside the existing composite model for the PSS slot is created automatically.
• Select the Block-Diagram “pss_STAB2A” from the standard IEEE-Library in the global library of PowerFactory [16].
• Enter the name and the parameters according to the table on the next page. • Calculate a load-flow and the initial conditions to check your project for errors.
Verify the behaviour of the power plant model using a closed-loop test similar to the AVR before:
• Test the model with a step response to the input voltage “paux” (closed-loop test) [17] • Define a variable set to monitor for the PSS element and visualize the results of the simulated
step response [18] for about one second. • To check the setup of the controller, show the block diagram of the controller [19].
• Calculate a load-flow and the initial conditions to check your project for errors.

- 1 2 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
PSS Settings for the ‘pss_STAB2A’:
--------------------------------------------------------------------------------
| | DIgSILENT | Project: |
| | PowerFactory |-------------------------------
| | 13.0.252 | Date: 11/11/2011 |
--------------------------------------------------------------------------------
|Grid:Grid Syst.Stage:Grid | Annex: / 1 |
--------------------------------------------------------------------------------
|PSS G1 Common Model 1 /1 |
--------------------------------------------------------------------------------
|Model Definition \Library\Models\IEEE\Models\pss_STAB2A |
|Out of Service No |
| Parameter |
| K2 Washout Factor [p.u.] 1.0000 |
| T2 Washout Time Constant [s] 4.5000 |
| K3 Signal Transducer 1th Factor [p.u.] 1.3000 |
| T3 Signal Transducer Time Constant [s] 2.0000 |
| K5 Output Filter Factor [p.u.] 1.5000 |
| T5 Output Filter Time Constant [s] 0.0100 |
| inv -1 [-1] -1.0000 |
| K4 Signal Transducer 2th Factor [p.u.] 1.0000 |
| Hlim Controller Maximum Output [p.u.] 0.0500 |
| |
--------------------------------------------------------------------------------
Now the influence of the additional PSS is to be analysed on the small and large signal stability of the one-machine problem. Therefore put the frame model, the AVR and PSS into service.
• Simulate the disturbances as above: • Short-circuit at the busbar ‘HV’ • Short-circuit in the middle (50%) of the overhead line ‘CCT2’. Clear the fault by tripping
the line as mentioned above.
• Determine the critical fault clearing time for both cases. • Compare the results and the critical fault clearing times of these cases and the cases
without the PSS in service.
• Execute a ‘Modal Analysis’ for the system with AVR and PSS. • Output the eigenvalues as well as the damping and eigenfrequency and analyse the
differences.

- 1 3 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
paux
pgt
upss
K/(1
+sT)
K5,T
5K
/(1+s
T)K5
,T5
KB K4
K/(1
+sT)
K3,T
3
KB inv
KsT
d/(1
+sT1
)K
2,T2
,T2
KsT
d/(1
+sT1
)K
2,T2
,T2
KsT
d/(1
+sT1
)K
2,T2
,T2
Lim
iterH
lim
pss_
STA
B2A
: Pow
er S
yste
m S
tabi
lizin
g U
nit (
ASE
A)
10
DIgSILENT
Figure 3: Block Diagram of the pss_STAB2A power system stabilizer

- 1 4 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Exercise 5: Motor Starting
In this example a nine-bus-bar 230 kV system is used, containing three different generators and some loads. In this exercise the auxiliary of generator G3 is modeled as an asynchronous motor. Then different start-up methods are used and the impact of the motor start on the network is analysed.
• First import the project file “Nine Bus Bar System” [4] and activate the project. • Define a new revision of the nine bus bar case [18] with a new study case “ (i.e. “motor
start-up”).
M ~M
otor
2.23
MW
0.84
Mva
r3.
50 k
A
Motor Trf
2.24
MW
1.09
Mva
r0.
10 k
A
-2.2
3 M
W-0
.84
Mva
r3.
50 k
A
-45.57 MW-13.98 Mvar
0 12 kA
Line
5
47.2
9 M
W-1
7.12
Mva
r0.
12 k
A
-46.47 MW-16.79 Mvar
0.12 kA
92.04 MW30.77 Mvar
0 24 kA
T3
-83.
50 M
W15
.05
Mva
r0.
21 k
A
83.5
0 M
W-1
1.09
Mva
r3.
44 k
A
G ~ G3
85.7
4 M
W-1
0.00
Mva
r3.
52 k
A
Line 4
0.11
kA
36.2
1 M
W2.
08 M
var
0.09
kA
Load
C
0.27
kA
Mot
or B
us0.
390.
9826
.00
Bus
314
.14
1.02
1.40
Bus
923
7.42
1.03
148.
75
Figure 4: Single-Line Diagram of the Motor to be added to the Nine Bus Bar Network.
Insert the motor element into the single-line diagram. Therefore see also the figure above.
• Insert a new bus bar into the system with a rated voltage Un = 0.4 kV. • Add the motor transformer using the transformer type “Motor-Trf” from the project library. • Add the motor element using the motor type (TypAsmo) “2500kW Motor” from the project
library. • Set the motor to the bus type “AS” and an active power of 2.23 MW on the load-flow page. • Check the load-flow results with the figure above.

- 1 5 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Simulate a motor start-up using the direct start-up function of PowerFactory:
• (Multi-) Select the motor plus a couple of bus bars whose voltage is of interest. • Run the automatic motor start-up simulation for 10 s. • Observe the plots, which are automatically created, as well as the result objects and the
switching event. For this simulation only the built-in motor load has been used. Now, a more detailed mechanical load model will be applied:
• Click with the right mouse button on the motor symbol and select “Define -> Motor Driven Machine (mdm)”.
• Select the “ElmMdm__3” model. • Enter the data from the table below into the “RMS-Simulation” page of the MDM. • This will automatically create a composite model for the motor and the mechanical load. • Check the changed mechanical load curve and the torque-speed characteristic on the “RMS-
Simulation” page of the motor. • Rerun the simulation. • Visualize the mechanical torque vs. speed characteristic and the electrical torque vs. speed
characteristic of the motor. Therefore use an x-y-plot [7]. • Compare the characteristics to the curves shown in the motor dialogue.
--------------------------------------------------------------------------------
| | DIgSILENT | Project: |
| | PowerFactory |-------------------------------
| | 13.1.252 | Date: 11/11/2004 |
--------------------------------------------------------------------------------
|Grid:Nine_Bus Syst.Stage:Motor Starting | Annex: / 1 |
--------------------------------------------------------------------------------
|Vers. 10.31-Model mdm__3 Vers. 10.31-Model mdm__3 1 /1 |
--------------------------------------------------------------------------------
|Out of Service No |
| |
|alf1;Torque at synchronous speed 1.0000 p.u. |
|slipm;Slip at min. torque 0.8000 p.u. |
|exp1;Exponent of first polynom. function 2.0000 |
|alf2;Torque at standstill 0.2000 p.u. |
|exp2;Exponent of second polynom. function 2.0000 |
|xkmm;Torque at slip = Slipm (min. torque) 0.1000 p.u. |
| |
--------------------------------------------------------------------------------

- 1 6 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Simulate a motor start-up using the standard stability function:
• Calculate a load-flow with disconnected motor. • Initialize the simulation. • Define the event for closing the motor breaker. • Define the result variables. • Start the simulation (RMS).
Rerun the same case with the EMT function (adaptive step size, min step=0.0001, max step=0.0005) and compare the results. Star-Delta Start: Simulate a star-delta start-up. Therefore events will be created, which will switch the motor to star connection and back to delta after 15s.
• Prepare the simulation as before. • Change the start-up method of the ASM on the second page of the RMS-simulation page in
the element dialogue from “Direct Online” to “Star-Delta”. • Set the time Y->D to t = 15s. • Rerun the simulation (mind changing back to RMS again)
Transformer Tap-Changer: Simulate a motor start-up by changing the tap position of the “Motor Trf” transformer. The transformer tap is divided into 2.5% steps. Check the tap controller on the load-flow page of the transformer type.
• Define “Set Parameter” events for the actual tap position nntap_int of the motor transformer. • Initially set the variable nntap_int first to 75% (tap = 10) at t = 0s. • Then set nntap_int to 90% (tap = 4) at t = 10s. • Finally set nntap_int to 100% (tap = 0) at t = 15s. • Rerun the simulation
Variable Rotor Resistance: Simulate a start-up with variable rotor resistance. Check the influence of an additional rotor resistance on the motor onto the start-up behaviour.
• Change the start-up method of the ASM on the second page of the RMS-simulation page in the element dialogue from “Direct Online” to “Variable Rotor Resistance”.
• Add three new rows to the table. • Set the additional resistance to 50% (0.5 p.u.) at t = 0s. • The set the additional resistance to 30% (0.3 p.u.) at t = 10s. • Then to 15% (0.15 p.u.) at t = 15s. • Finally set the additional resistance to 0% (0 p.u.) at t = 20s to end the start up sequence. • Rerun the simulation

- 1 7 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
Appendix: Detailed Instructions
#1: To create a new project
Main Menu: "File - New" (Ctrl + N). This opens the "New" dialog. Tick the option "New - Project". Enter the project's name. Make sure that the 'Target Folder' points to the folder in which you want to create the project (normally that is your user account folder).
Press Execute. A grid is automatically created in the new project and a dialog will pop up asking you for the name of that grid. The empty single line diagram for the newly created grid will be shown.
You may change the name of the project after you have created it through the main menu: "Edit - Project". This menu-option opens the project dialog. Be careful not to change any settings or buttons which you do not know.
You can change the name of the Study Case through the main menu : "Edit - Study Case". Here you can change the name of the study case, but you can also change the settings of the Grids that are activated by the study case. To change the grids, press the button "Grids/System Stages". This opens a list of all Grids. You can either double-click the name to change it (press "return" twice to confirm the change), or you can select the Grid that you want to change (by left-clicking the icon in the first column), and press the "Edit Object" Button in the current window.
#2: Inserting Elements inside the Library
First open the data manager and select the local library of your active project. Then press the “New
object” button and select the right device type for inserting into the library for the list shown. When the data is inserted, you can select this type for the according element from its edit dialog by using the option “Select project type…”
#3: (De)activating a Project
The last 5 active projects are listed at the "File" menu on the main menu bar. The currently active project is the first one in this list. To deactivate the currently active project, select it in the list (left click it). Alternatively, you may choose the option "File - Close Project" from the main menu.
To activate a project, select it in the list of 5 last active projects. To activate a project that is not in the list of 5 last active projects, use the option on the main menu "File - Open project". This brings a tree with all the projects in your user account. Select the project that you want to activate.
#4: Import a DZ File from Disk
Press Main Menu: “File” -> "Import" or the button in the data manager. Select the file on disk that you want to import. If required, press the black arrow button to select another path to which you want to import the objects in the file. This opens a tree with all the folders in your database from which you can select the correct folder (normally, this would be your user account folder).

- 1 8 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
#5: Inserting Elements into the Single Line Graphic
• You may want to maximise the drawing area by pressing the button. Press this button again to return to normal viewing mode.
• Select an object in the drawing toolbox. (start with a busbar or terminal)
• Move to the drawing area. Position the element by a left click. When you want to move it, select it with a left mouse click, then drag it along.
• Select a busbar/terminal and drag the small black squares to resize the busbar/terminal
• Connect a branch/load/generator etc. by clicking on a busbar/terminal
• Double-click an element to open its dialog
In an element's dialog, press the small button with the down-arrow to select a type. Choose "Select Project Type" to jump to the local, project specific, type-library.
Tips:
• Start entering a new grid by drawing all busbars/terminals. Then connect the branches between them.
• Use the zoom function.
• Use the undo button if you have drawn an object of the wrong type
#6: Visualizing Results
• With the button add an new graphics page to the case and select “Virtual Instrument Panel”. This will create a new VI page, where plot can be shown.
• Append a number of virtual instruments (VIs) to the empty page by using the “Append VIs”
button and entering the number of VIs. Thus a specified number of empty plots will occur in the page.
• For a normal plot use the “Subplot (VisPlot)” VI for showing time dependent variables.
• In the edit dialog of the plot you can then define the variables to look at.
#7: Visualizing Dependent Variables
• Append a virtual instrument to the VI page by using the “Append VIs” button . For showing a variable depending on a second variable use the “X-Y Plot (VisXyplot)” and then define a variable for the x-axis and one for the y-axis in the edit dialog of the plot.

- 1 9 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
#8: Defining a Variable Selection
• Before defining the variables to monitor the initial conditions have to be calculated (using the
button)
• Then right-click on the element to be monitored and select “Define -> Variable Set (Sim)” from the context sensitive menu.
• All variable sets of selected elements are now shown. Double-click the element you just selected.
• This brings a selection window, where you can create, select or edit a set of variables. If a variable set is edited, then a variable set manager will pop up. This variable set manager shows in the left pane the available variables, and in the right pane the selected variables. Press the [<<] or [>>] buttons to move the selected variable from the one to the other pane. Use the various filter settings to show more available variables.
• The variable set will now consist of the selected variables, which are now ready to show in a plot.
#9: Defining Simulation Events
Before running the simulation it is often necessary to define simulation events, which will take place during the next simulation.
• Before specifying an event the initial conditions have to be calculated (using the button)
• Then events can be created and defined by opening the current event list ( ) and then
create new events using the “New Object” button .
#10: Changing the Generator Torque
• Similar to defining the short-circuit events for this exercise a “Event of Synchronous Machine
(ElmSym)” is created in the event list ( ) using the “New Object” button .
• Make sure you reset the calculation or run the initial conditions before trying to change the events.
• Enter the additional torque 0.01p.u. for the first event.
• Enter the additional torque -0.01p.u. for the second event to get back to the pre-disturbance values

- 2 0 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
#11: Calculate the Eigenvalues
• Before calculating the eigenvalues with the modal analysis you have first to calculate the
initial conditions using the button
• Then the button for the Modal Analysis is becoming active . Run the modal analysis to calculate all system eigenvalues.
#12: Output the Calculated Eigenvalues
• Using the function “Output Calculation Analysis” and then selecting the option ‘Eigenvalues’ the output of Eigenvalues is activated.
• Select from the options, which information should be printed to the output window: - Eigenvalues - Participations - Participations detailed
• When using the Participation/Participation detailed option the ‘Select Eigenvalue(s)’ dorp down menu should be set to “filtered”. You can edit the filter to a specific maximal damping of the mode or to a maximal period duration time.
#13: Import of DLP Scripts
Press Main Menu: “File” -> "Import" or the button in the data manager. Select the project file on disk that you want to import.
Press the black arrow button to select the study case to which you want to import the script. This opens a tree with all the folders in your database from which you can select the correct folder (normally, this would be your user account folder).
#14: Defining a DPL Command Selection
• Multi-select the required elements in the grid or in the data manager.
• Right-click the selection.
• Select ‘Define -> DPL Command Set’ from the context sensitive menu.
The DPL command set is stored inside the study case.

- 2 1 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
#15: Running a DPL command
• Double-click the DPL command.
• Insert/Change the listed parameters.
• Select the DPL command set for the general selection of the script.
#16: Creating a Common Model
There is also a way of defining the controller models manually:
• Open the data manager and select the “grid” in the left window of the manager.
• Select the “New Object” button and select “Common Model” in the upcoming dialog.
• Chose the controller definition “vco_ESAC1A” from the global library in the folder “\Library\Models\IEEE\Models\”.
• Press OK and insert the controller parameter.
#17: Open-Loop Test
• Open the event list ( ) and use the “New Object” button to insert a “Set Parameter (EvtPara)” event
• Select the AVR controller for the element.
• Insert the name of the variable ‘usetp’ and the new value for this variable (=0.9).
#18: Defining Variables and Visualizing Results
• According to [8] and [6] define and visualize the input variables ‘u’ and ‘usetp’ and the output (excitation) voltage ‘uerrs’ to the generator.
#19: Show Block Diagram
• Open the data manager and select the AVR element inside the ‘grid’ or
• Select the AVR using the button “edit calculation relevant objects” .
• Right-click the element “AVR G1”.

- 2 2 -
T r a i n i n g C o u r s e D o c u m e n t s [ L a s t m o d i f i e d : 5 / 2 2 / 2 0 0 7 ]
• Select the option “Show Graphic” in the context-sensitive menu.
#20: Creating a Composite Model
• Open the data manager and select the “grid” in the left window of the manager.
• Select the “New Object” button and select “Composite Model” in the upcoming dialog.
• Chose the controller definition “IEEE-frame no droop” from the global library in the folder “\Library\Models\IEEE\Frames\”.
• Press OK and insert the references to the generator and the AVR by right-clicking the slot and select “select element/type”.
#21: Defining a new Revision
• Right-click the active study case in the data manager and select the option “New -> Revision”.
• Insert a name for the new study case (i.e. “motor start-up”).
• Input a name for the new system stage (i.e. also “motor start-up”).
• Now the new study case is activated.
#22: Running an Automatic Motor Start-Up
• Select one motor and at least one bus bar or several in the network.
• Right-click the motor symbol or another selected element.
• Select the option “Calculate… -> Motor Startup…”
• Insert the time period for the simulation.