Embed Size (px)
Citation preview

전자정보대학 김영석 1
Stability and Frequency Compensation (Ch. 10)
김 영 석
충북대학교 전자정보대학
2010.3.1
Email: [email protected]

전자정보대학 김영석 2
10.1 General Considerations
YX
(s) =H (s)
1+ βH (s)May oscillate at ω if |βH ( jω) |=1 and ∠βH ( jω) = −180 (Barkhausen criteria)
Basic Stability

전자정보대학 김영석 3
Stable and Unstable Systems(a) 위상=-180도에서 Excessive Gain>1 => Unstable
(b) 위상=-180도에서 Gain<1 => Stable

전자정보대학 김영석 4
Stability and Complex Poles(a) Unstable with Growing Amplitude
(b) Unstable with Constant Amplitude Oscillation
(c) Stable 0
0
0
<
=
>
p
p
p
σ
σ
σ

전자정보대학 김영석 5
Basic One Pole Bode Plot|βH|=1일 때 Phase -180도(Barkhausen 조건) 만족 못함
=> Unconditionally Stable
)1(1
1)(1
)()(
/1)(
00
0
0
0
0
AwsA
A
sHsHs
XY
wsA
sH
β
ββ
++
+=
+=
+=

전자정보대학 김영석 6
Multipole Systems
)/1)(/1()(
21
0
pp wswsA
sH++
=
|βH|=1일 때 Phase -180도에 근접하면 Unstable
Phase > -180도 => Stable

전자정보대학 김영석 7
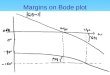
Phase Margin
|βH|=1일 때 (Phase+180)=Phase Margin
Phase Margin ~ 0 => UnStable (a)

전자정보대학 김영석 8
Phase Margin (cont.)
Phase Margin, θm = 45°
Phase Margin=45도 이상이 필요함
Phase Margin=45도 일 때 주파수 overshoot 30%

전자정보대학 김영석 9
Phase Margin (cont.)
Phase Margin 증가하면 Time Domain Response 에서 Ringing 감소
(Freq Domain Response에서 Peaking 감소)

전자정보대학 김영석 10
Small Signal Analysis Limitations
Small signal analysis yields 65 ° of θm, but large signal transient response is different. Large signal simulation includes effects not
seen in small signal analysis.
다음 회로의 경우 Bode Plot(Small Signal Analysis)에서 PM=60도임. 그러나 Large Signal Analysis에서는 Ringing을 보임. 그 이유로 Slewing, 소자의 Nonlinear Behavior 때문임. Large Signal Application의 경우이와 같은 Time Domain 해석이 필요함

전자정보대학 김영석 11
10.4 Frequency Compensation
Compensation is the manipulation of gain and/or pole positions to improve phase margin.
Unstable System을 Stable하게 하기 위해서 Freq. Comp. 필요함

전자정보대학 김영석 12
Compensation (cont.)
Dominant Pole을 Low Freq 로 옮김 => PM 확보

전자정보대학 김영석 13
Single Ended Single Stage Amp
Dominant Pole=Wout: Large CL/Rout
A Node: Large Stray Cap. =>
2nd Dominant Pole

전자정보대학 김영석 14
Single Ended Single Stage Amp (cont)
Pre- and Post-Compensation
PM 없음 => Unstable
Freq Comp: Dominant Output Pole을 낮은 주파수로 이동 시킴. 다른 Pole 들은 그대로 둠. => PM 45도 확보

전자정보대학 김영석 15
Fully Differential Telescopic Op-AmpNo Mirror Pole => Bandwidth 증가

전자정보대학 김영석 16
10.5 Comp. of Two Stage Op AMpsWp,x: 높은 주파수
Wp,E: Large R => 낮은 주파수
Wp,A: R=ro, Large CL=> 낮은 주파수
Unstable

전자정보대학 김영석 17
Compensation (cont.)
Miller Effect Ceq = CE + (1+ Av2)CC
f pE =1
2πRout[CE + (1+ Av2)CC ]
Miller Compensation
Miller Cap Cc로 E Node의 Dominant Pole을낮은 주파수로 이동

전자정보대학 김영석 18
Compensation (cont.)
f p,in =1
2π RS CE + (1+ gmRL )CC[ ]+ RL (CC + CL)( )
Recall, from Chap. 6:(assume CC includes CGD9)
f p,in ≈1
2πRS CE + (1+ gmRL )CC[ ]
fp,in = Wp,E/2/pi => 작아짐

전자정보대학 김영석 19
Compensation (cont.)
f p,out ≈RSgm 9RLCC + RLCC
2πRS RL(CECC + CCCL )=
gm 9
2π (CE + CL )
f p,out =RS (1+ gm 9RL )CC + RSCE + RL(CC + CL)
2πRS RL(CECC + CECL + CC CL)
fp,out = Wp,A/2/pi => 커짐

전자정보대학 김영석 20
Compensation (cont.)
Recall, transfer function includes(1− s /ωz ) numerator term and
fZ(RHP) = gm9
2πCC
앞의 Compensation은 RHP zero 발생 => Phase margin 악화시킴

전자정보대학 김영석 21
Phase and Magnitude of RHP Zero

전자정보대학 김영석 22
RHP Zero Removal
fZ =gm 9
2πCC (1/gm 9 − RZ )
RHP zero 제거 위해 Rz 저항 삽입

전자정보대학 김영석 23
RHP Zero Removal (cont.)
fZ = 12πCC (1/ gm 9 − RZ )
Could set R z =1/gm9, or cancel other non - dominant pole
1CC (1/gm 9 − RZ )
= −gm9
CL + CE
RZ =CL + CE + CC
gm 9CC
≈ CL + CC
gm 9CC
= wp,A

전자정보대학 김영석 24
Miller Compensation (cont.)
Temp. and Process Tracking
on)Cancellati Zero(Pole
조절 I 되게 1
−+=
=Δ
=
=
=
)1(1
)/()/(1
)/(1
9
15
14
14151515
1415
913
C
L
m
moxpon
GSGS
GSGS
CC
g
LWLW
gVLWCR
VVVV
μ

전자정보대학 김영석 25
Miller Compensation (cont.)Defining gm9 with respect to Rs

전자정보대학 김영석 26
Load Capacitance EffectsOne Stage: Increase CL => Increase PM => More Stable
Two Stage: Increase CL => Output Pole을 낮은 주파수로 이동 시킴. Cc에 의한 1st Stage Output Pole(Dominant)쯕으로 이동시켜 PM을 악화시킴

전자정보대학 김영석 27
10.6 Other Compensation Techniques

전자정보대학 김영석 28
Other Compensation Techniques (cont.)
f p1 ≈1
2πRS gm1RLCC
f p2 ≈gm1
2πCL

전자정보대학 김영석 29
Other Compensation Techniques (cont.)

전자정보대학 김영석 30
Other Compensation Techniques (cont.)
f p1 ≈1
2πRS gm1RLCC
f p2 ≈gm1gm 2RS
2πCL

전자정보대학 김영석 31
Slewing in Two-Stage Op Amps
Basic Two-Stage Op Amp

전자정보대학 김영석 32
Slewing in Two-Stage Op Amp

전자정보대학 김영석 33
Slewing with Common-Gate Compensation






![61BuckConv설계.ppt [호환 모드]bandi.chungbuk.ac.kr/~ysk/61BuckConvDesign.pdfPWM Buck Converter PSPICE Frequency Compensation? 19 Voltage Mode PWM 20 Current Mode PWM 21 Synchronous](https://img.dokumen.tips/doc/110x75/5b24bc9c7f8b9a59098b5421/61buckconvppt-bandi-ysk61buckconvdesignpdfpwm-buck-converter.jpg)















![dev8 flash.ppt [호환 모드]bandi.chungbuk.ac.kr/~ysk/devnot8.pdf · 2011-04-09 · Nonvolatile Memory 2) EPROM(UV Erasable Programmable ROM) Floating Gate Hot Electron Injection](https://img.dokumen.tips/doc/110x75/5e5f74c6e684fe0d06241d8c/dev8-flashppt-eeoebandi-yskdevnot8pdf-2011-04-09-nonvolatile.jpg)

![9LPF.ppt [호환 모드]bandi.chungbuk.ac.kr/~ysk/RF9LPF.pdf · 2009-07-28 · 2nd-Order Filters(Biquad) 전자정보대학김영석 37. Higher-Order Filters Cascade Design Lower](https://img.dokumen.tips/doc/110x75/5b3ce26c7f8b9a986e8d4b91/9lpfppt-bandi-yskrf9lpfpdf-2009-07-28-2nd-order-filtersbiquad.jpg)



