Embed Size (px)
Citation preview

Noname manuscript No.(will be inserted by the editor)
Spatiotemporal patterns in a general networkedactivator-substrate model
Mengxin Chen · Qianqian Zheng · Ranchao Wu · Liping Chen
Abstract For the purpose of understanding the spa-tiotemporal pattern formation in the random networkedsystem, a general activator-substrate model with net-
work structure is introduced. Firstly, we investigate theboundedness of the non-constant steady state of the el-liptic system of the continuous media system. It is found
that the non-constant steady state admits their upperand lower bounds with certain conditions. Then, oneinvestigates some properties and non-existence of the
non-constant steady state with the no-flux boundaryconditions. The main results show that the diffusionrate of activator should greater than the diffusion rate
of substrate. Otherwise, there might be no pattern for-mation of the system. Afterwards, a general randomnetworked activator-substrate model is made public.
The conditions of the stability, the Hopf bifurcation,the Turing instability and a co-dimensional-two Turing-Hopf bifurcation are yield by the method of stability
analysis and bifurcation theorem. Finally, we choose asuitable sub-system of the general activator-substratemodel to verify the theoretical results, and full numeri-
cal simulations are well verified these results. Especially,an interesting finding is that the stability of the posi-tive equilibrium will switch from unstable to stable one
M.X. ChenCollege of Mathematics and Information Science, Henan Nor-mal University, Xinxiang, 453007, China
Q.Q. ZhengSchool of Mathematics and Statistics, Xuchang University,Xuchang, 461000, China
R.C. Wu()School of Mathematical Sciences, Anhui University, Hefei230601, ChinaE-mail: [email protected]
L.P ChenSchool of Electrical Engineering and Automation, Hefei Uni-versity of Technology, Hefei 230009, China
with the change of the connection probability of thenodes, this is different from the pattern formation inthe continuous media systems.
Keywords Activator-substrate model, Random
network, Spatiotemporal patterns, Non-constantsteady state.
1 Introduction
In the real world, reaction-diffusion is one of the mostbasic movement processes, and it can be used to de-
scribe the spread of diseases, chemical reactions, bio-logical migration and other phenomena. Hence, manycoupled reaction-diffusion equations are used to under-
stand this process in a continuous space. An interestingand challenging research area is understanding the Tur-ing patterns by a coupled reaction-diffusion equation
[1–4]. Along this way, there has been a great deal of ac-cumulated achievements to enrich pattern formationswithin coupled reaction-diffusion systems. Such as, the
stripe patterns, the stripe and the spotted mixed pat-terns in a one-dimensional region [5,6], and more com-plex hexagonal patterns, the labyrinthine-like stripe pat-
terns, Eckhaus patterns, chaos in a two-dimensional re-gion [7,8]. What is more, the spatiotemporal patternsalso have been investigated where the Turing mode
and the non-Turing mode intersect by reaction-diffusionequations. For instance, a codimensional-two Turing-Hopf bifurcation was considered in [9,10] by the tech-
nique of the normal form theory and the multiple timescales, respectively.
It is noticed that models in the references mentionedabove are governed by the continuous systems. How-ever, as it is known that in many cases the reaction-
diffusion process under scrutiny is defined in a discrete

2 Mengxin Chen et al.
media rather than in a continuous one, such as dis-
ease spread and control, population dynamics and soon. Therefore, could such rich spatial and spatiotempo-ral behaviors happen in the discrete reaction-diffusion
systems? Keep all in mind, a reaction-diffusion modelwith the network structure may be worth considering.Asllani et al. [11] showed that the homogeneous fixed
point can become unstable due to the topology of thenetwork, which cannot be induced on undirected graphs,and the traveling waves, or quasi-stationary patterns
can be found in a network system. Diego et al. [12] pro-vided a first general theory of Turing network topol-ogy, which proves why three key features of a Turing
system are directly determined by the topology, andthey also yield that in experimental systems, it is easierto obtain reliable information about the topology of a
network than precise values of diffusion constants. Theinstability and pattern formations on several differentnetworks including deterministic networks and randomnetworks with time delay are explored by Chang et al.
[13], and wave patterns can be generated on differentnetworks by numerical simulations. The Hopf bifurca-tion and its detailed nature have been considered in a
network-organized semiarid vegetation model with timedelay by Tian et al. in [14]. For more dynamical resultson the network-organized systems one could refer to
Refs. [15–18] and references cited therein.
However, we note that the results about the influ-
ence of the connection probability of nodes are few [19].Inspired by this discovery, we will explore the influenceof the connection probability of nodes in a networked
model. To this end, we first introduce a continuous me-dia system of the form
∂u∂t − d1∆u = ukf(v)− βu, x ∈ Ω, t > 0,∂v∂t − d2∆v = c− ukf(v)− v, x ∈ Ω, t > 0,∂u∂n = ∂v
∂n = 0, x ∈ ∂Ω, t ≥ 0,u(x, 0) = u0(x) ≥ 0,v(x, 0) = v0(x) ≥ 0, x ∈ Ω,
(1)
where u = u(x, t) and v = v(x, t) are the concentra-
tions of the activator and the substrate, respectively;constants d1 and d2 stand for the diffusion coefficientsof activator u and substrate v, respectively; k ≥ 2 and
f(v) is a monotone increasing function with respect tov; spatial domain Ω is a bounded domain in Rn(n ≥ 1)with the boundary ∂Ω; n is the outward unit normal
vector along ∂Ω and ∂n represents the operator of di-rectional derivative along the direction n; parametersc, β, d1, d2 are positive constants from the point of view
of chemistry. The dimensionless system (1) is commonlycalled the depletion model or the activator-substratemodel, and it firstly proposed by Gierer and Meinhardt
in 1972 [20]. Meinhardt and Klingler [21] employed this
model to explore pigmentation and relief-like patterns
on mollusc shells when f(v) = v and replaced uk byu2
1+κu2 +ρ0, where κ > 0 and ρ0 represents a small base
production of the activator. A similar results has beencarried out by Fowler et al. [22] to describe the pigmen-tation patterns on shell surfaces. The Hopf bifurcation
and its direction as well as the Turing instability havebeen studied by Wu et al. [23] when the monotone in-creasing function f(v) = v and k = 2. Also, the asymp-totic stability of constant steady states, the steady state
bifurcations from constant steady states are analyzedboth in one-dimensional kernel and in two-dimensionalkernel cases have been investigated by Wang et al. in
[24]. For more results on activator-substrate model (1)one can refer to Refs. [25,28].
Now, if we assume that each node of the networkowns the homogeneous densities in a small community,a general networked activator-substrate model takes the
form:dui
dt − d1N∑j=1
∆ijui = uki f(vi)− βui,
dvidt − d2
N∑j=1
∆ijvi = c− uki f(vi)− vi.
(2)
Here, we assume that the networked model (2) is de-fined on an undirected network with N nodes and thereis no self-loops; ui and vi are the concentrations of the
activator and the substrate on node i, respectively; ∆is the N × N Laplacian matrix of network set to be∆ij = kiδij − Lij , at which L is the adjacency ma-
trix encoding the network connection, namely it satis-fies Lij = 1 if there is a link connecting from patch ito patch j, otherwise, Lij = 0 if there is no any link
connecting from patch i to patch j, and δij is the Kro-necker’s delta. In addition, the degree of the ith nodeis defined by ki =
∑Nj=1 Lij , and p(0 ≤ p ≤ 1) is set to
be the connection probability between node i and nodej for i = j.
In this work, we shall research the dynamics of the
general activator-substrate model (1) and networkedmodel (2), respectively. More precisely, the bounded-ness of the positive non-constant steady state will be
studied for the elliptic system of the continuous gen-eral activator-substrate model (1). With the help of themaximum principle and the Harnack’s inequality one
shows that it admits the upper bounds and the lowerbounds for any positive solution (u(x), v(x)) under cer-tain conditions. Also, we explore the sufficient condi-
tions to ensure the non-existence of the non-constantsteady state by means of the Poincare’s inequality andCauchy-Schwarz inequality. It is found that there is
no non-constant steady state of the elliptic system if

Spatiotemporal patterns in a general networked activator-substrate model 3
the diffusion rate of activator greater than the diffu-
sion rate of substrate. This is very useful informationfor studying the formation of spatiotemporal patterns.Moreover, we would like to mention that all the re-
sults obtained above employ the homogeneous Neu-mann boundary conditions and assume that f(v) satis-fies (C0), where
(C0) : f ∈ C1(0,∞) ∩ C[0,∞), f(0) = 0, f(v) > 0
and δ > f ′(v) > 0 for v ∈ (0,∞).
For the networked activator-substrate model (2),
some general results of the existence of internal posi-tive equilibrium and its stability, the Hopf bifurcationand the Turing-Hopf bifurcation are given, and a spe-
cial example is considered to verify these general re-sults. As we know, the Turing-Hopf bifurcation is acodimensional-two bifurcation, at which both the Hopf
mode and the Turing mode will intersect. Hence, theformation of patterns may more complex than patternsnear the Hopf mode and the Turing mode. Compared
with the works done in [14] and references cited therein,this work has two highlights: (i) In addition to the Hopfbifurcation and the Turing instability, the spatiotem-
poral patterns near the Turing-Hopf bifurcation is alsoconsidered by theoretically and numerically. (ii) Thenumerical simulation results indicate that the connec-
tion probability p has a crucial influence on the Turingpattern formation, namely the stability of the internalpositive equilibrium will switch from unstable to sta-
ble one with the changing of the connection probabilityp, although we fix the parameters of model (2) in theTuring instability region.
The layout of this paper is structured as follows. InSect. 2, the boundedness and the non-existence of thenon-constant steady state of the related elliptic system
(1) are carried out. In Sect. 3, stability, existence of theHopf bifurcation, the Turing instability and the Turing-Hopf bifurcation of the general networked activator-
substrate model (2) are considered. Then, a sub-systemof the general networked activator-substrate model (2)is introduced in Sect. 4, and full numerical simulations
are finished in Sect. 5 to verify that the theoretical real-ity. Finally, some discussions and conclusions are madein Sect. 6.
2 Non-constant steady state
In this section, we shall investigate the non-existence of
the non-constant steady state of the elliptic system, it
is governed byd1∆u(x) + uk(x)f(v(x))− βu(x) = 0, x ∈ Ω,
d2∆v(x) + c− uk(x)f(v(x))− v(x) = 0, x ∈ Ω,∂u∂n = ∂v
∂n = 0, x ∈ ∂Ω.
(3)
2.1. A priori estimates
Lemma 1 ([26]) Suppose that F (x, ω(x)) ∈ C(Ω×R).(i) If ω(x) ∈ C2(Ω) ∩ C1(Ω) satisfies∆ω(x) + F (x, ω(x)) ≥ 0, in Ω,∂ω(x)∂n ≤ 0 on ∂Ω,
and ω(x0) = maxx∈Ω ω(x), then F (x0, ω(x0)) ≥ 0.
(ii) If ω(x) ∈ C2(Ω) ∩ C1(Ω) satisfies∆ω(x) + F (x, ω(x)) ≤ 0, in Ω,∂ω(x)∂n ≥ 0 on ∂Ω,
and ω(x0) = minx∈Ω ω(x), then F (x0, ω(x0)) ≤ 0.
Lemma 2 ([27]) Suppose that ω(x) ∈ C2(Ω) ∩ C1(Ω)
be a positive solution of
∆ω(x) + c(x)ω(x) = 0, x ∈ Ω,∂ω(x)
∂n= 0 on ∂Ω,
and satisfying homogeneous no-flux boundary conditions
and c(x) ∈ C(Ω)∩L∞(Ω). Then there exists a positiveconstant c∗ = c∗(∥c(x)∥∞, Ω) such that
maxx∈Ω
ω(x) ≤ c∗ minx∈Ω
ω(x).
Theorem 1 Suppose that c, β, d1 and d2 are positiveconstants, k ≥ 2 and f satisfies condition (C0). If (u(x), v(x))is a positive solution of system (3), then there is a con-
stant σ > 0 such that ∥f∥∞ ≤ σ and
1
c∗
(β
σ
)1−k
≤ u(x) ≤ cmax
d2d1,1
β
, (4)
and
c− σck(max
d2d1,1
β
)k
≤ v(x) ≤ c, (5)
where positive constant c∗ only depends on∥∥∥∥ 1
d1
(uk(x)f(v(x))− βu(x)
)∥∥∥∥∞
≤ 1
d1
(σck
(max
d2d1,1
β
)k
+ βcmax
d2d1,1
β
).

4 Mengxin Chen et al.
Proof. We assume that (u(x), v(x)) is a positive solu-
tion of system (3), and
u(x0) = minx∈Ω
u(x), u(x1) = maxx∈Ω
u(x),
v(y0) = minx∈Ω
v(x) v(y1) = maxx∈Ω
v(x).
By Lemma 1 and the second equation of (3), we have
c− uk(y1)f(v(y1))− v(y1) ≥ 0,
this leads to v(y1) ≤ c, namely v(x) ≤ c for x ∈ Ω.Noticing that function f(v(x)) satisfies condition (C0)and v(x) ≤ c for x ∈ Ω, we claim that there is a positive
constant σ > 0 such that ∥f(v(x))∥∞ ≤ σ holds forx ∈ Ω. As a result, by the first equation of (3), we have
uk(x1)f(v(x1))− βu(x1) ≥ 0,
it leads to a fact u(x1) ≥(
βσ
)1−k
.
On the other hand, defining a linear function of the
form
ω(x) = d1u(x) + d2v(x), (6)
it follows that
∆ω(x) = βu(x) + v(x)− c, x ∈ Ω,∂ω
∂n= 0, on ∂Ω.
(7)
In addition, we assume that ω(x) has maximum atx = z1, i.e., ω(z1) = maxx∈Ω ω(x). Then by means ofLemma 1 and Eqs. (6), (7), one obtains
u(z1) ≤1
β(c− v(z1)), ω(z1) ≤
cd1β
+
(d2 −
d1β
)v(z1).
Consequently, we have the following result
d1u(x1) ≤ ω(x1) ≤ ω(z1) ≤cd1β
+
(d2 −
d1β
)v(z1).
It is noticed that v(x) ≤ c, then one has
u(x1) ≤c
β+ c
(d2d1
− 1
β
)≤ cmax
d2d1,1
β
,
this indicates that u(x) ≤ cmax
d2
d1, 1β
for x ∈ Ω.
Let
c(x) =1
d1
(uk(x)f(v(x))− βu(x)
),
then it is easy to check out ∥c(x)∥∞ ≤M , where
M =
1
d1
(σck
(max
d2d1,1
β
)k
+ βcmax
d2d1,1
β
)> 0.
Therefore, by Lemma 2 we claim that there is a constant
c∗ = c∗(∥c(x)∥∞) > 0 such that
(β
σ
)1−k
≤ u(x1) ≤ c∗u(x0),
it then follows that u(x0) ≥ 1c∗
(βσ
)1−k
, namely u(x) ≥
1c∗
(βσ
)1−k
for x ∈ Ω.
By employing Lemma 1 and the second equation of
(3) again, we have
c− uk(y0)f(v(y0))− v(y0) ≤ 0,
this leads to
v(y0) ≥ c− σck(max
d2d1,1
β
)k
.
The proof is completed.
In what follows, we shall research non-existence ofthe non-constant steady state solution of system (3).
To do so, let 0 = λ0 < λ1 < λ2 < · · · < λi < · · · andlimi→∞ λi = ∞ be the complete set of eigenvalues ofthe operator −∆ with no-flux boundary conditions in
Ω.
2.2. Non-existence of non-constant steady state
Suppose that (u(x), v(x)) is a positive solution of sys-
tem (3), we denote their averages over domain Ω by
u =1
|Ω|
∫Ω
u(x)dx and v =1
|Ω|
∫Ω
v(x)dx.
Then it is easy to verify a fact that
∫Ω
(u− u)dx = 0 and
∫Ω
(v − v)dx = 0.
Let ϕ = u − u and φ = v − v, then we know that∫Ωϕdx = 0 and
∫Ωφdx = 0.
Lemma 3 Suppose that c, β, d1 and d2 are positive con-stants. If (u(x), v(x)) is a positive solution of system
(3), then∫Ωϕφdx < 0.
Proof. From (7), we know that ∆ω(x) = βu(x) +
v(x)−c, then a straightforward computation shows that

Spatiotemporal patterns in a general networked activator-substrate model 5
∆ω(x) = βϕ+ φ. Then multiplying it by (6) and inte-
grating by parts, one obtains
−∫Ω
|∇ω|2dx =
∫Ω
(βϕ+ φ)(d1u+ d2v)dx
=βd1
∫Ω
ϕudx+ βd2
∫Ω
ϕvdx
+ d1
∫Ω
φudx+ d2
∫Ω
φvdx
=βd1
∫Ω
ϕ2dx+ βd2
∫Ω
ϕφdx
+ d1
∫Ω
φϕdx+ d2
∫Ω
φ2dx
=βd1
∫Ω
ϕ2dx+ (βd2 + d1)
∫Ω
ϕφdx
+ d2
∫Ω
φ2dx.
Since∫Ωϕ2dx > 0 and
∫Ωφ2dx > 0, this follows that∫
Ωϕφdx < 0.
Lemma 4 Suppose that c, β, d1 and d2 are positive con-
stants. If (u(x), v(x)) is a positive solution of system(3), then it admits
(i)
∫Ω
ϕ2dx+
∫Ω
|∇ϕ|2dx ≤
(1 + λ1)|Ω|(σck
(max
d2
d1, 1β
)k+ βcmax
d2
d1, 1β
)2
d21λ21
,
(ii)
∫Ω
φ2dx+
∫Ω
|∇φ|2dx ≤
(1 + λ1)|Ω|(2c+ σck
(max
d2
d1, 1β
)k)2
d22λ21
.
Proof. Assume that (u(x), v(x)) is an arbitrary pos-itive solution of system (3), then by Cauchy-Schwarz
inequality and integrate by parts, one obtains
d1
∫Ω
|∇ϕ|2dx
=
∫Ω
ϕ(ukf(v)− βu)dx
≤
(σck
(max
d2d1,1
β
)k
+ βcmax
d2d1,1
β
)
×∫Ω
|ϕ|dx
≤√|Ω|
(σck
(max
d2d1,1
β
)k
+ βcmax
d2d1,1
β
)
×(∫
Ω
|ϕ|2dx) 1
2
,
and
d2
∫Ω
|∇φ|2dx
=
∫Ω
φ(c− ukf(v)− v)dx
≤
(2c+ σck
(max
d2d1,1
β
)k)
×∫Ω
|φ|dx
≤√|Ω|
(2c+ σck
(max
d2d1,1
β
)k)
×(∫
Ω
|φ|2dx) 1
2
.
By employing the Poincare’s inequality, that is∫Ω
ϕ2dx ≤ 1
λ1
∫Ω
|∇ϕ|2dx,∫Ω
φ2dx ≤ 1
λ1
∫Ω
|∇φ|2dx,
where λ1 is the first positive eigenvalue of −∆ overdomain Ω with respect to the no-flux boundary condi-tions, we therefore obtain
d1
∫Ω
|∇ϕ|2dx
≤√|Ω|
(σck
(max
d2d1,1
β
)k
+ βcmax
d2d1,1
β
)
×(∫
Ω
|ϕ|2dx) 1
2
,
≤
√|Ω|λ1
(σck
(max
d2d1,1
β
)k
+ βcmax
d2d1,1
β
)
×(∫
Ω
|∇ϕ|2dx) 1
2
,
and
d2
∫Ω
|∇φ|2dx
≤√|Ω|
(2c+ σck
(max
d2d1,1
β
)k)
×(∫
Ω
|φ|2dx) 1
2
≤
√|Ω|λ1
(2c+ σck
(max
d2d1,1
β
)k)
×(∫
Ω
|∇φ|2dx) 1
2
.

6 Mengxin Chen et al.
This leads to∫Ω
|∇ϕ|2dx
≤|Ω|(σck
(max
d2
d1, 1β
)k+ βcmax
d2
d1, 1β
)2
d21λ1,
and
∫Ω
|∇ψ|2dx ≤|Ω|(2c+ σck
(max
d2
d1, 1β
)k)2
d22λ1.
By employing the Poincare’s inequality again, one achieves∫Ω
ϕ2dx+
∫Ω
|∇ϕ|2dx
≤(1 + λ1)|Ω|
(σck
(max
d2
d1, 1β
)k+ βcmax
d2
d1, 1β
)2
d21λ21
,∫Ω
ψ2dx+
∫Ω
|∇ψ|2dx
≤(1 + λ1)|Ω|
(2c+ σck
(max
d2
d1, 1β
)k)2
d22λ21
.
This completes the proof.
Now, we consider non-existence results of the non-constant steady state solution of system (3).
Lemma 5 Assume that c, β, d1 and d2 are positive con-stants in (3), then
uk − uk ≤ kck(max
d2d1,1
β
)k
(u− u).
Proof. Since u(x) ≤ cmax
d2
d1, 1β
for x ∈ Ω, then we
have u(x) ≤ cmax
d2
d1, 1β
for x ∈ Ω. Accordingly,
uk − uk = (u− u)(uk−1 + uuk−2 + · · ·uk−2u+ uk−1
)≤ kck−1
(max
d2d1,1
β
)k−1
(u− u).
Now we yield the following result.
Theorem 2 Suppose that c, β, d1, d2, k ≥ 2 are positive
constants in (3) and Ω ⊂ Rn is a bounded domainwith sufficient smooth boundary, then elliptic system(3) has no non-constant steady state solution if there
is a positive constant d∗ = d∗(c, k, σ, β, δ,Ω) such that
mind1, d2 > maxd∗1, d∗2, where we denote
d∗1 =kσck−1
(max
d2
d1, 1β
)k−1
4λ1
×
[4 + kσck−1
(max
d2d1,1
β
)k−1],
d∗2 =c2kδ2
(max
d2
d1, 1β
)2k4βλ1
.
Proof. Let (u(x), v(x)) be a non-negative steady state
solution of system (3). Then, multiplying ϕ to the firstequation of (3) and integrating by parts over domainΩ, one yields
d1
∫Ω
|∇ϕ|2dx =
∫Ω
(ukf(v)− βu)ϕdx
=
∫Ω
(ukf(v)− βu))ϕdx
−∫Ω
(ukf(v)− βu)ϕdx
=
∫Ω
(ukf(v)− ukf(v))ϕdx
− β
∫Ω
(u− u)ϕdx,
=I1 + I2,
where we denote
I1 =
∫Ω
(ukf(v)− ukf(v))ϕdx,
I2 = −β∫Ω
(u− u)ϕdx = −β∫Ω
ϕ2dx.
By Lemma 5, one has
I1 =
∫Ω
(ukf(v)− ukf(v))ϕdx
=
∫Ω
(ukf(v)− ukf(v) + ukf(v)− ukf(v))ϕdx
=
∫Ω
(uk − uk)f(v)ϕdx+
∫Ω
uk(f(v)− f(v))ϕdx
≤kσck−1
(max
d2d1,1
β
)k−1 ∫Ω
ϕ2dx
+ ckδ
(max
d2d1,1
β
)k ∫Ω
|ϕφ|dx.

Spatiotemporal patterns in a general networked activator-substrate model 7
Hence, the Poincare’s inequality and Cauchy-Schwarz
inequality reveal that
d1
∫Ω
|∇ϕ|2dx
≤ kσck−1
(max
d2d1,1
β
)k−1 ∫Ω
ϕ2dx
+ ckδ
(max
d2d1,1
β
)k ∫Ω
|ϕφ|dx− β
∫Ω
ϕ2dx
≤kσck−1
(max
d2d1,1
β
)k−1 ∫Ω
ϕ2dx
+c2kδ2
(max
d2
d1, 1β
)2k4β
∫Ω
φ2dx
≤kσck−1
(max
d2
d1, 1β
)k−1
λ1
∫Ω
|∇ϕ|2dx
+c2kδ2
(max
d2
d1, 1β
)2k4βλ1
∫Ω
|∇φ|2dx.
Similarly, multiplying φ to the second equation of (3)
and integrating by parts over domain Ω, we have
d2
∫Ω
|∇φ|2dx
=
∫Ω
(c− ukf(v)− v)φdx
=c
∫Ω
φdx−∫Ω
vφdx−∫Ω
ukf(v)φdx
=−∫Ω
φ2dx−∫Ω
(ukf(v)− ukf(v))φdx,
≤−∫Ω
φ2dx− kσck−1
(max
d2d1,1
β
)k−1 ∫Ω
|ϕφ|dx
− ckδ
(max
d2d1,1
β
)k ∫Ω
φ2dx
≤−∫Ω
φ2dx+ kσck−1
(max
d2d1,1
β
)k−1 ∫Ω
|ϕφ|dx
≤k2σ2c2(k−1)
(max
d2
d1, 1β
)2k−2
4
∫Ω
ϕ2dx
≤k2σ2c2(k−1)
(max
d2
d1, 1β
)2k−2
4λ1
∫Ω
|∇ϕ|2dx.
As a result, one deduces
d1
∫Ω
|∇ϕ|2dx+ d2
∫Ω
|∇ψ|2dx
≤kσck−1
(max
d2
d1, 1β
)k−1
4λ1
×
[4 + kσck−1
(max
d2d1,1
β
)k−1]∫
Ω
|∇ϕ|2dx
+c2kδ2
(max
d2
d1, 1β
)2k4βλ1
∫Ω
|∇φ|2dx
=d∗1
∫Ω
|∇ϕ|2dx+ d∗2
∫Ω
|∇φ|2dx,
where d∗1 and d∗2 are set to be
d∗1 =kσck−1
(max
d2
d1, 1β
)k−1
4λ1
×
[4 + kσck−1
(max
d2d1,1
β
)k−1],
d∗2 =c2kδ2
(max
d2
d1, 1β
)2k4βλ1
.
Thence, if there is a d∗ = d∗(c, k, β, σ, δ,Ω) such that
mind1, d2 > maxd∗1, d∗2 := d∗,
holds, then one has ∇ϕ = ∇φ = 0, this indicates that(u(x), v(x)) must be a positive constant solution of el-
liptic system (3).
Theorem 3 Suppose that c, β, d1, d2, k ≥ 2 are positiveconstants in (3) and Ω ⊂ Rn is a bounded domain with
sufficient smooth boundary, then elliptic system (3) hasno non-constant steady state solution if
(d1 + 2βd22)
[k2σ2c2(k−1)
(max
d2
d1, 1β
)2k−2]
8βλ21d21d2
< 1.
Proof. Consider that multiplying Eq. (7) by ϕ and in-tegrating it by parts, we have
−∫Ω
∇ω∇ϕdx = β
∫Ω
ϕ2dx+
∫Ω
ϕφdx. (8)
From Eq. (6), one obtains∫Ω
∇ωdx = d1
∫Ω
∇udx+ d2
∫Ω
∇vdx,
we therefore obtain∫Ω
∇ω∇ϕdx = d1
∫Ω
|∇ϕ|2dx+ d2
∫Ω
∇ϕ∇φdx. (9)

8 Mengxin Chen et al.
Combining Eqs. (8) and (9), we have
d2
∫Ω
∇ϕ∇φdx =− d1
∫Ω
|∇ϕ|2dx− β
∫Ω
ϕ2dx (10)
−∫Ω
ϕφdx. (11)
Then, by employing Eqs. (6) and (10), one has
0 ≤∫Ω
|∇ω|2dx =d21
∫Ω
|∇ϕ|2dx+ 2d1d2
∫Ω
∇ϕ∇φdx
+ d22
∫Ω
|∇φ|2dx
=d22
∫Ω
|∇φ|2dx− d21
∫Ω
|∇ϕ|2dx
− 2βd1
∫Ω
ϕ2dx− 2d1
∫Ω
ϕφdx.
Therefore, the Poincare’s inequality and Cauchy-Schwarz
show that
d21
∫Ω
|∇ϕ|2dx+ 2βd1
∫Ω
ϕ2dx
≤d22∫Ω
|∇φ|2dx+ 2d1
∫Ω
|ϕφ|dx
≤d22∫Ω
|∇φ|2dx+ 2d1
√∫Ω
ϕ2dx
∫Ω
φ2dx
≤d22∫Ω
|∇φ|2dx+ 2βd1
∫Ω
ϕ2dx+d12β
∫Ω
φ2dx
≤d22∫Ω
|∇φ|2dx+ 2βd1
∫Ω
ϕ2dx+d1
2βλ1
∫Ω
|∇φ|2dx.
It then leads to∫Ω
|∇ϕ|2dx
≤d1 + 2βd222βλ1d21
∫Ω
|∇φ|2dx
≤(d1 + 2βd22)
[k2σ2c2(k−1)
(max
d2
d1, 1β
)2k−2]
8βλ21d21d2
×∫Ω
|∇ϕ|2dx.
Consequently, we claim that (u(x), v(x)) must be a con-stant solution of elliptic system (3) if
(d1 + 2βd22)
[k2σ2c2(k−1)
(max
d2
d1, 1β
)2k−2]
8βλ21d21d2
< 1.
The desired result is confirmed.
Remark 1 By means of Theorem 2.3 we find a fact
that
limd1→∞
(d1 + 2βd22)
[k2σ2c2(k−1)
(max
d2
d1, 1β
)2k−2]
8βλ21d21d2
= 0 < 1.
This indicates that system (3) always has no non-constantsolution if d1 is large enough and d2 is fixed. Thence, inview of the spatial or spatiotemporal patterns of system
(3) we should restrict d1 < d2, namely, the diffusion rateof activator should great than the diffusion rate of sub-strate. Otherwise, there might be no pattern formation
of system (3).
3 Spatiotemporal patterns in the networkedmodel
In this section, we shall investigate the Hopf bifurca-tion, Turing instability and the Turing-Hopf bifurcationof the networked system (2). It is easy to check out thatsystem (2) has a positive equilibrium E∗ = (u∗, v∗) =
(u∗, c − βu∗) when 0 < u∗ <cβ . Keeping this in mind,
we now perform the linear stability analysis of system(2) near internal positive equilibria E∗ = (u∗, v∗). To
do so, let δui = ui − u∗ and δvi = vi − v∗, then thelinear system of (2) evaluated at E∗ = (u∗, v∗) can bedescribed as follows
(δuiδvi
)= J
(δuiδvi
)+D
N∑j=1
∆ijδuj
N∑j=1
∆ijδvj
, (12)
where
J =
(Fu Fv
Gu Gv
), D =
(d1 00 d2
),
with
Fu = (k − 1)β > 0, Fv = uk∗f′(v∗) > 0,
Gu = −kβ < 0, Gv = −uk∗f ′(v∗)− 1 < 0.
Let 0 = Λ1 > Λ2 > · · · > ΛN be the eigenvalues ofthe discrete Laplacian matrix ∆, and we assume that
Lϕ = ϕiNi=1 is the subspace generated by the eigen-functions associated to the topological eigenvalue Λi.As a result, the general solution of system (2) can be
written as follows(δuiδvi
)=
N∑i=1
(aibi
)ϕie
λit, (13)

Spatiotemporal patterns in a general networked activator-substrate model 9
withN∑j=1
∆ijϕj = Λiϕi. Putting (12) into (11), then for
each node i = 1, 2, · · ·N , we have
λi
(aibi
)ϕie
λit = J
(aibi
)ϕie
λit + ΛiD
(aibi
)ϕie
λit.
It follows that
|λiI − J − ΛiD| = 0, for i = 1, 2, · · ·N.
Hence, we have the characteristic equation for eachnode with the form
λ2i − TΛi(d2, β)λi +DΛi(d2, β) = 0, for i = 1, 2, · · ·N,(14)
whereTΛi(d2, β) = (d1 + d2)Λi + Fu +Gv,DΛi(d2, β) = d1d2Λ
2i + (d1Gv + d2Fu)Λi
+FuGv −GuFv,
(15)
with Fu + Gv = (k − 1)β − uk∗f′(v∗) − 1 and FuGv −
GuFv = β(uk∗f′(v∗) − k + 1). Then the characteristic
roots of Eq. (13) can be exhibited of the form
λi =TΛi(d2, β)±
√T 2Λi(d2, β)− 4DΛi(d2, β)
2. (16)
Now, we have stability results of the internal posi-tive equilibrium E∗ as follows.
Theorem 4 Suppose that c, β, k ≥ 2 are positive con-stants, 0 < u∗ <
cβ and d1 = d2 = 0. Then
(i) if βH < kk−1 , then E∗ = (u∗, v∗) is unstable;
(ii) if 0 < kk−1 < βH and β > βH , then E∗ = (u∗, v∗) is
unstable;(iii) if 0 < k
k−1 < βH and β < βH , then E∗ = (u∗, v∗)is locally asymptotically stable;
(iv) if 0 < kk−1 < βH and β = βH , then networked
system (2) undergoes a Hopf bifurcation, where βH =uk∗f
′(v∗)+1k−1 .
Proof. Recall that Eqs. (13) and (15), the stability
of the positive equilibrium E∗ = (u∗, v∗) can be deter-mined by the sign of TΛi(d2, β) and DΛi(d2, β). That isthe positive equilibrium E∗ = (u∗, v∗) is locally asymp-
totically stable if TΛi(d2, β) < 0 and DΛi(d2, β) > 0.Here if d1 = d2 = 0, then we denote T0(d2, β) = Fu +Gv = (k − 1)β − uk∗f
′(v∗)− 1 and D0(d2, β) = FuGv −GuFv = β(uk∗f
′(v∗)−k+1). A straightforward compu-tation shows that D0(d2, β) < 0 if βH < k
k−1 . This im-plies there is at least one eigenvalue of the characteristic
equation (13) with positive real part, so E∗ = (u∗, v∗) isunstable, no matter what the sign of T0(d2, β) is. Con-clusion (i) is valid. Condition 0 < k
k−1 < βH indicates
D0(d2, β) > 0. Hence, it is easy to verify (ii) and (iii)
are true. On the other hand, taking the derivatives with
respect to β yield
dReλ
dβ
∣∣∣β=βH
=k − 1
2> 0. (17)
Thence, the Poincare-Andronov-Hopf bifurcation theo-rem shows that the local system of (2) undergoes theHopf bifurcation at E∗ = (u∗, v∗) when β = βH . This
completes the proof.In what follows, we focus on the Turing instability
of the positive equilibrium E∗ = (u∗, v∗) when diffusionis presented.
Theorem 5 Suppose that c, β, k ≥ 2 are positive con-stants, 0 < u∗ <
cβ , 0 <
kk−1 < βH and β < βH . Then
(i) if Fu
d1≤ 1, then E∗ = (u∗, v∗) is locally asymptoti-
cally stable;
(ii) if Fu
d1> (−Λic) and d2 < dT2 , then E∗ = (u∗, v∗) is
locally asymptotically stable;(iii) if Fu
d1> (−Λic) and d2 > dT2 , then E∗ = (u∗, v∗)
is unstable, it implies that the networked system (2)undergoes a Turing instability, where
dT2 =d1Gv(−Λic)−D0
(−d1Λic − Fu)(−Λic)> 0,
for some suitable Λic ∈ Λ1, Λ2 · · · ΛN.Proof. Form Theorem 4, we know that E∗ = (u∗, v∗)
is locally asymptotically stable when 0 < kk−1 < βH and
β < βH . This leads to T0(d2, β) < 0, D0(d2, β) > 0. Onthe other hand, notice that 0 = Λ1 > Λ2 > · · · > ΛN ,
then we have TΛi(d2, β) = (d1+ d2)Λi+T0 < 0. Hence,the stability of positive equilibrium E∗ is determinedby sign of DΛi(d2, β). Now, rewriting DΛi(d2, β) in the
following form
DΛi(d2, β)
=d1d2Λ2i + (d1Gv + d2Fu)Λi + FuGv −GuFv,
=d1d2(−Λi)2 − (d1Gv + d2Fu) (−Λi) +D0
=d1d2
[(−Λi)−
Fu
d1
](−Λi) +D0 − d1Gv(−Λi)
=d2(d1(−Λi)− Fu))(−Λi) +D0 − d1Gv(−Λi).
It is noticed that Fu > 0 and Gv < 0, we thus obtain
D0−d1Gv(−Λi) > 0 for all i = 1, 2, ···N . Hence, if Fu
d1≤
1 then we have −Fu
d1≥ −1 ≥ Λi, namely (−Λi)− Fu
d1≥
0. It indicates that DΛi(d2, β) > 0 for all i = 1, 2, · · ·N .Then all eigenvalues of the characteristic equation (13)have negative real parts, namely, E∗ = (u∗, v∗) is locally
asymptotically stable.If Fu
d1> (−Λic), then one has d1(−Λic) − Fu < 0.
This means dT2 > 0 for some suitable Λic ∈ Λ1, Λ2 · · ·ΛN. On the other hand, if d2 < dT2 , one obtains
d2 < dT2 ≤ d1Gv(−Λic)−D0
(−d1Λic − Fu)(−Λic),

10 Mengxin Chen et al.
this gives DΛic(d2, β) = d2(d1(−Λic) − Fu))(−Λic) +
D0 − d1Gv(−Λic) > 0. Consequently, all eigenvaluesof the characteristic equation (13) have negative realparts, namely E∗ = (u∗, v∗) is locally asymptotically
stable. (ii) is true. By the same manner, one could ob-tain DΛic(d2, β) < 0 if Fu
d1> (−Λic) and d2 > dT2 . This
indicates there is at least one eigenvalue of the charac-
teristic equation (13) has positive real part. As a result,the networked system (2) may admit a Turing instabil-ity. The proof is finished.
We now proceed to exhibit a result of the Turing-Hopf bifurcation as below.
Theorem 6 Suppose that c, β, k ≥ 2 are positive con-stants, 0 < u∗ <
cβ . Then the networked system (2) un-
dergoes the Turing-Hopf bifurcation at (d2, β) = (d∗2, β∗),
whereβ∗ =uk∗f
′(v∗)+1k−1 ,
d∗2 =(uk
∗f′(v∗)+1)[d1(k−1)(−Λc
i )+uk∗f
′(v∗)−k+1]
(1−k)(−d1Λci−uk
∗f′(v∗)−1)(−Λc
i ),
if there exists some suitable Λci ∈ Λ1, Λ2 · · · ΛN.
Proof. For the purpose of obtaining the Turing-
Hopf bifurcation point (d2, β) = (d∗2, β∗), one should
guarantee the Hopf bifurcation curve and the Turingbifurcation curve intersect. By Theorem 4 and Theorem
5, we know that the networked system (2) admits theHopf bifurcation at β = βH and the Turing bifurcationwhen d2 = dT2 . Hence, for the Turing-Hopf bifurcation,
the following equations should be satisfied, that isT0(d2, β) = 0,DΛi(d2, β) = 0.
Consequently, we haveβ∗ =uk∗f
′(v∗)+1k−1 ,
d∗2 =(uk
∗f′(v∗)+1)[d1(k−1)(−Λc
i )+uk∗f
′(v∗)−k+1]
(1−k)(−d1Λci−uk
∗f′(v∗)−1)(−Λc
i ).
Also, a simple calculation shows that
dReλ
dd2
∣∣∣d2=d∗
2
=Λci (d1Λ
ci + Fu)
TΛci(d∗2, β)
= 0, (18)
for some suitable Λci ∈ Λ1, Λ2 · · · ΛN. This combine
with Eq. (16) we claim that the results in Theorem 6are valid.
4. An application
In this section, we shall verify the results exhibited in
Theorem 4-6. To do so, we set k = 2 and f(v) = v, then
the network system (2) becomes:dui
dt − d1N∑j=1
∆ijui = u2i vi − βui,
dvidt − d2
N∑j=1
∆ijvi = c− u2i vi − vi.
(19)
Let α = cβ . Then when α = 2, the system (18)
has a unique internal positive equilibrium E1 = (1, β),and when α > 2, system (18) has two internal positive
equilibrium E2 and E3, where
E2 =
(α−
√α2 − 4
2,α+
√α2 − 4
2β
),
E3 =
(α+
√α2 − 4
2,α−
√α2 − 4
2β
).
By [23], the internal positive equilibrium E1 is non-hyperbolic, and E2 is a unstable saddle. Therefore, weshall main focus on the dynamical behaviors of the in-
ternal positive equilibrium E3, and we denote it by E∗,that is E3 = E∗ = (u∗, v∗), where
u∗ =α+
√α2 − 4
2, v∗ =
α−√α2 − 4
2β.
Obviously, we have 0 < u∗ < α. Then we obtain thefact that
Fu = β > 0, Fv =α2 − 2 + α
√α2 − 4
2> 0,
Gu = −2β < 0, Gv = −α2 + α
√α2 − 4
2< 0.
As a result, we exhibit the main results of system(18) as follows:
Theorem 7 Suppose that c, β are positive constants,α > 2 and d1 = d2 = 0. Then(i) if βH < 2, then E∗ = (u∗, v∗) is unstable;
(ii) if 0 < 2 < βH and β > βH , then E∗ = (u∗, v∗) isunstable;(iii) if 0 < 2 < βH and β < βH , then E∗ = (u∗, v∗) is
locally asymptotically stable;(iv) if 0 < 2 < βH and β = βH , then network system (2)
undergoes a Hopf bifurcation, where βH = α(α+√α2−4)
2 .Proof. It is easy to obtainT0(d2, β) = Fu +Gv = β − α2+α
√α2−4
2 ,
D0(d2, β) = FuGv −GuFv = α2−4+α√α2−4
2 β.
Then, based on Theorem 4 the results in Theorem 7 arevalid.
Theorem 8 Suppose that c, β are positive constants,α > 2, 0 < 2 < βH and β < βH . Then(i) if β
d1≤ 1, then E∗ = (u∗, v∗) is locally asymptoti-
cally stable;

Spatiotemporal patterns in a general networked activator-substrate model 11
(ii) if βd1> (−Λic) and d2 < dT2 , then E∗ = (u∗, v∗) is
locally asymptotically stable;(iii) if β
d1> (−Λic) and d2 > dT2 , then E∗ = (u∗, v∗) is
unstable, it implies that the network system (2) under-
goes a Turing instability, where
dT2 =d1Gv(−Λic)−D0(d2, β)
(−d1Λic − β)(−Λic)> 0,
for some suitable Λic ∈ Λ1, Λ2 · · · ΛN, in which Gv
and D0(d2, β) can be found as before.
Proof. Similar to the proof of Theorem 5, here weomit the detailed proof process.
Theorem 9 Suppose that c, β are positive constantsand α > 2. Then the network system (2) undergoes the
Turing-Hopf bifurcation at (d2, β) = (d∗2, β∗), whereβ∗ = α(α+
√α2−4)
2 ,
d∗2 =(u2
∗+1)[d1(−Λci )+u2
∗−1]
(d1Λci+u2
∗+1)(−Λci )
,
for some suitable Λci ∈ Λ1, Λ2 · · · ΛN.
Proof. By the same manner in Theorem 6, onecould show these results, here we omit the detailedproof process.
5. Numerical simulations
In Sect. 4, we perform the stability analysis and bifur-cations analysis of the networked system (18), and therelated results have been exhibited in the Theorems 7-9.
Hence, we shall carry out some numerical simulationsto verify these results. We fix N = 100, that is thenumbers of the nodes in the random network system
(2) are 100. Moreover, we set p(0 ≤ p ≤ 1) is the con-nection probability of different nodes ui and uj . Firstly,
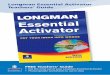
Fig. 1 The distribution of ui in the Watts-Strogatz randomnetwork at moment t = 100. The connection probability p
for (A)-(F) are 0, 0.1, 0.2, 0.3, 0.4 and 0.5, respectively. Hereparameters are c = 2.2, β = 1, d1 = 1.5 and d2 = 10.
to exhibit the distribution of the solutions ui and vi of
system (2), here we assume that the network is a Watts-Strogatz type [29]. From the point view of mathematics,a Watts-Strogatz network is an undirected graph, and
some of the connections between the nodes are deter-mined, and some of them are random. It possesses thehomogeneous degree distribution [14]. It is noticed that
the distribution of solutions ui and vi under Watts-Strogatz network is very similar, so we only performthe distribution of ui under Watts-Strogatz network.
Here we choose parameters in random network system(2) are c = 2.2, β = 1, d1 = 1.5 and d2 = 10, average de-gree is 4, and the connection probability p is variable.
It is found that ui and uj will eventually become aclosed circle when connection probability p = 0, where1 ≤ i, j ≤ 100 and i = j. However, when one choose
0 < p < 1 such closed circle will be destroyed. Moreprecisely, ui will randomly walk in different positionsat the same time t. Hence, connection probability p hasa vital influence on the distribution of ui, see Fig. 1 for
more details.
Fig. 2 The random network system (2) undergoes a Hopf bi-furcation at positive equilibrium E∗ = (2.6180, 3.0023). Hereparameters are c = 23.58, β = 7.86 and p = 0.05.
Now we choose c = 23.58, β = 7.86 and connec-tion probability p = 0.05 then one has α = 3, βH =7.8551 ≈ 7.86. Hence, the random networked system
(2) undergoes a Hopf bifurcation at positive equilib-rium E∗ = (2.6180, 3.0023), and the periodic solutionbifurcated from the Hopf bifurcation is spatially homo-
geneous, see Fig. 2.

12 Mengxin Chen et al.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-Λi
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
Re
(λi)
d2=7.8534
d2=15
d2=5
0 0.2 0.4 0.6 0.8 1 1.2 1.4
-Λi
-10
-8
-6
-4
-2
0
2
4
6
8
10
DΛ
i(d2,β
)
d2=15
d2=7.8534
d2=5
Fig. 3 Left: plot Re(λi) against different values of d2, andhere (·) represents eigenvalue of the discrete Laplacian matrix.Right: plot of DΛi
(d2, β) against −Λi for different values ofthe parameter d2. Here parameters are c = 2.3, β = 1, d1 = 0.5and p = 0.02.
Figure 3 shows the real parts of the characteristicrootsRe(λi) against different values of d2, andDΛi(d2, β)against −Λi for different values of the parameter d2, re-
spectively. Here we choose c = 2.3, β = 1, d1 = 0.5 andp = 0.02, then we know that the critical value of theTuring instability is d2 = dT2 = 7.8534 with critical
value Λi = Λic = −1. It is found that when d2 > dT2 ,then we have Re(λi) > 0 and DΛi(d2, β) < 0. Hence,the random networked system (2) admits the Turing in-
stability. Also, if d2 < dT2 , then we have Re(λi) < 0 andDΛi(d2, β) > 0. That means there is no Turing patternwill emerge in the random network system (2).
Fig. 4 There is no Turing instability of the random networksystem (2). Here parameters are c = 2.3, β = 1, d1 = 0.5, d2 =5 and p = 0.02.
Figure 4 shows the internal positive equilibrium E∗is locally asymptotically stable. Here we choose d2 <dT2 , and the other parameters are fixed in Fig. 3. How-
ever, when taking diffusion coefficient d2 = 10 > dT2 , wefind that the Turing instability emerges, and such insta-bility exhibits the stripe patterns, see Fig. 5. Therefore,
the theoretical analysis in Theorem 8 are well verifiedby the numerical simulation results exhibited in Figs. 4and 5.
Figure 6 performs the bifurcation diagram in the
plane of β − d2. It is found that the plane of β − d2
Fig. 5 The random network system (2) admits the Turinginstability. Here parameters are c = 2.3, β = 1, d1 = 0.5, d2 =10 and p = 0.02.
is divided into four regions, namely stability region,
the Hopf instability region, the Turing instability re-gion and the Turing-Hopf bifurcation region, respec-tively. Obviously, the parameters in Figs. 4 and 5 are
located in stale region and the Turing instability regionof Fig. 6, respectively.
Now, we choose c = 23.58, d1 = 2 and p = 0.02,then we obtain the fact that d2 = d∗2 = 10.56 andβ = β∗ = 7.85 with critical value Λi = Λic = −1.
This implies that the random networked system (2)may undergo a codimensional-two Turing-Hopf bifur-cation near the critical point (β, d2) = (7.85, 10.56). To
do so, we take parameters in the Turing-Hopf region,i.e., d2 = 10.6 and β = 7.86. As a result, the randomnetworked system (2) admits the Turing-Hopf bifurca-
tion, and the spatially inhomogeneous periodic solutioncan be induced by such codimensional-two bifurcation,see Fig. 7.
In short, all the theoretical analysis in Theorems 7-9are valid.
To further understand the role of connection prob-ability p in the Turing patterns formation. In what
follows, we shall fix the parameters in Fig. 5. That isc = 2.3, β = 1, d1 = 0.5, d2 = 10 but change the con-nection probability p. We only perform the patterns of
ui for convenience.
In Fig. 8, we take the connection probability p = 0.
The numerical simulation result shows that there is noany eigenvalues −Λi of the discrete matrix locate inthe Turing instability region. Thence, the internal pos-
itive equilibrium E∗ is asymptotically stable, namely

Spatiotemporal patterns in a general networked activator-substrate model 13
7.5 8 8.5 9 9.5
β
5
6
7
8
9
10
11
12
13
14
15
d 2 •
stable region
Turing region
Turing-Hopf region
(β∗, d∗2)
βH
d2T
Hopf region
Fig. 6 Bifurcation diagram in the plane of β − d2. Here c =23.58, d1 = 2, and (β∗, d∗2) = (7.85, 10.56) is the Turing-Hopfbifurcation point.
Fig. 7 Spatiotemporal patterns in the random network sys-tem (2) induced by the Turing-Hopf bifurcation. Here param-eters are c = 23.58, β = 7.86, d1 = 2, d2 = 10.6 and p = 0.02.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-12
-10
-8
-6
-4
-2
0
2
Fig. 8 There is no eigenvalues of the discrete Laplacian ma-trix locate in Turing instability region, and positive equilib-rium E∗ is stable. Here parameters are c = 2.3, β = 1, d1 =0.5, d2 = 10 and p = 0.
the random networked system (2) will not exhibit the
Turing instability.
In Fig. 9, we shall choose the connection probability
p = 0.02. The numerical simulation shows that there are
some −Λi in the Turing instability region, i.e., there
exists some −Λi in the Turing instability region suchthat the real parts of characteristic roots Re (λi) > 0.Therefore, the random networked system (2) undergoes
a Turing instability.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-Λi
-12
-10
-8
-6
-4
-2
0
2
Re(λi)
Fig. 9 The Turing instability emerges when there are someeigenvalues of the discrete Laplacian matrix locate in Turinginstability region. Here parameters are c = 2.3, β = 1, d1 =0.5, d2 = 10 and p = 0.02.
In Fig. 10, we shall choose the connection probabil-ity p = 0.05. The numerical simulation shows that there
are some −Λi in the Turing instability region. However,compared with Fig. 9 there are fewer −Λi in the Turinginstability region. Consequently, by comparison we find
that there are fewer stripe in the picture.We then choose the connection probability p = 0.07
in the Fig. 11. It is found that there are fewer −Λi lo-
cate in the Turing instability region than Figs. 9 and10. More precisely, there is one −Λi lies in the Turinginstability region. Hence, the stripe patterns in the pic-
ture are fewer. That implies that the Turing instabilitywill eventually happen in the random networked system(2).
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-Λi
-12
-10
-8
-6
-4
-2
0
2
Re(λi)
Fig. 10 The Turing instability emerges when there are someeigenvalues of the discrete Laplacian matrix locate in Turinginstability region. Here parameters are c = 2.3, β = 1, d1 =0.5, d2 = 10 and p = 0.05.
In Fig. 12, we take the connection probability p =0.09, then we find that there is no any −Λi locates in
the Turing instability region. That is to say, although

14 Mengxin Chen et al.
the same parameters are fixed in the Fig. 5, the Turing
pattern will not appear in the random network system(2). And, the right picture of Fig. 12 well verify thatsuch prediction. It is found that the internal positive
equilibrium E∗ becomes a stable one again.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-Λi
-12
-10
-8
-6
-4
-2
0
2
Re(λi)
Fig. 11 The Turing instability emerges when there are someeigenvalues of the discrete Laplacian matrix locate in Turinginstability region. Here parameters are c = 2.3, β = 1, d1 =0.5, d2 = 10 and p = 0.07.
Summarizing the numerical results exhibited in Figs.8-12, we claim that a fact that the connection probabil-
ity p has a essential influence on the pattern formationin the random networked system. This is very differentfrom the pattern formation in the continuous media sys-
tems. Precisely, for the continuous media system, if theparameters are fixed in the Turing instability region,then the eigenvalues of the Laplacian matrix are fixed.
Hence, the Turing pattern may exist. However, for therandom network system, although the parameters arefixed in the Turing instability, the eigenvalues of the
discrete Laplacian matrix, Λi, are not fixed, namely itmay be in or out of the Turing instability area with thechange of the connection probability p. Thence, apart
from diffusion coefficients, the connection probability palso has a crucial influence on the pattern formation ofrandom network systems compared with the continuous
media systems.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-Λi
-12
-10
-8
-6
-4
-2
0
2
Re(λi)
Fig. 12 There is no eigenvalues of the discrete Laplacianmatrix locate in Turing instability region, and positive equi-librium E∗ becomes stable again. Here parameters are c =2.3, β = 1, d1 = 0.5, d2 = 10 and p = 0.09.
6. Conclusions
In this work, a general activator-substrate model withnetwork structure is introduced to understand the for-mation of spatiotemporal patterns. We first consider
the general continuous activator-substrate model, herethe maximum principle and the Harnack’s inequalityare used to investigate the boundedness of the non-
constant steady state of the corresponds elliptic sys-tem. It is found that the non-constant steady state ad-mits their upper and lower bounds with certain condi-
tions, see Theorem 1. Then, the Poincare’s inequality,Cauchy-Schwarz inequality and the technique of inte-grating by parts are employed to research some proper-
ties and non-existence of the non-constant steady statewith the no-flux boundary conditions. One shows thatthe general activator-substrate model admits the non-
constant steady state if the diffusion rate of activatorgreater than the diffusion rate of substrate, see Theo-rem 2 and Theorem 3. Afterwards, a general random
network activator-substrate model is introduced. Theexistence conditions of the stability, the Hopf bifurca-tion, the Turing instability and the Turing-Hopf bifur-
cation are yield by the method of linear analysis andbifurcation theorem, see Theorems 4-6, respectively. Fi-nally, a suitable sub-system of the general activator-
substrate model is investigated, and full numerical sim-ulations are well verified these results. Especially, theunstable positive equilibrium E∗ will become stable with
the change of the connection probability p by compar-ing Figs. 8-12. Hence, the connection probability p ofthe nodes is also an important factor for the forma-
tion of the Turing pattern compared with the continu-ous media systems. In addition, whether the degree ofnodes has an influence on the pattern formation in the
random network systems also is worth exploring. Wewill research it in future works.
Declaration
Funding
This work was supported by the National Natural Sci-ence Foundation of China (Nos. 11971032, 62073114),RanchaoWu and Liping Chen is supported by these two
foundations (Nos. 11971032, 62073114), and MengxinChen is supported by the foundation (No. 11971032),Qianqian Zheng is supported by Young Talent Support
Project of Henan (2020HYTP012).

Spatiotemporal patterns in a general networked activator-substrate model 15
Compliance with ethical standards
The work complies with ethical standards.
Conflicts of interest/Competing interests
The authors declare that they have no conflict of inter-est.
Availability of data and material
All data and material generated or analysed during this
study are included in this published article.
References
1. Chen, M.X., Wu, R.C., Chen, L.P.: Spatiotemporal pat-terns induced by Turing and Turing-Hopf bifurcationsin a predator-prey system, Appl. Math. Comput. 380,125300 (2020).
2. Wang, J.F., Wu, S.N., Shi, J.P.: Pattern formation indiffusive preydator-prey systems with predator-taxis andprey-taxis, Discret. Cont. Dyn. Syst. B 26(3), 1273-1289(2021).
3. Wang, W., Liu, S.T., Tian, D.D., et al.: Pattern dy-namics in a toxin-producing phytoplankton-zooplanktonmodel with additional food, Nonlinear Dyn. 94(1), 211-228 (2018).
4. Berenstein, I.: Standing wave-like patterns in the Gray-Scott model, Chaos 25(6), 064301 (2015).
5. Chen, M.X., Wu, R.C., Liu, B., Chen, L.P.: Hopf-Hopfbifurcation in the delayed nutrient-microorganism model,Appl. Math. Model. 86, 460-483 (2020) .
6. Tan, W., Yu, W.W., Hayat, T., et al.: Turing instabilityand bifurcation in a diffusion predator-prey model withBeddington-DeAngelis functional response, Int. J. Bifur-cat. Chaos 28(9), 1830029 (2018).
7. Pal, S., Petrovskii, S., Ghorai, S., Banerjee, M.: Spa-tiotemporal pattern formation in 2D prey-predator sys-tem with nonlocal intraspecific competition, Commun.Nonlinear Sci. Numer. Simul. 93, 105478 (2021).
8. Chen, M.X., Wu, R.C., Chen, L.P.: Pattern dynamics in adiffusive Gierer-Meinhardt model, Int. J. Bifurcat. Chaos30(12), 2030035 (2020).
9. Song, Y.L., Jiang, H.P., Yuan, Y.: Turing-Hopf bifurca-tion in the reaction-diffusion system with delay and appli-cation to a diffusive predator-prey model, J. Appl. Anal.Comput. 9(3), 1132-1164 (2019).
10. Chen, M.X., Wu, R.C., Liu, B., et al.: Spatiotemporaldynamics in a ratio-dependent predator-prey model withtime delay near the Turing-Hopf bifurcation point, Com-mun. Nonlinear Sci. Numer. Simul. 77, 141-167 (2019).
11. Asllani M., Challenger, J.D., Pavone F.S., et al.: The the-ory of pattern formation on directed networks, Nat. Con-mmun. 5(1), 1-9 (2014).
12. Diego, X., Marcon, L., Muller, P., Sharpe, J.: Key fea-tures of Turing systems are determined purely by networktopology, Phys. Rev. X 8, 021071 (2018).
13. Chang, L.L., Liu, C., Sun, G.Q., et al.: Delay-inducedpatterns in a predator-prey model on complex networkswith diffusion, New J. Phys. 21, 073035 (2019).
14. Tian, C.R., Ling, Z., Zhang, L.: Delay-driven spatial pat-terns in a network-organized semiarid vegetation model,Appl. Math. Comput. 367, 124778 (2020).
15. Mimar, S., Juane, M.M., Park, J., et al.: Turing patternsmediated by network topology in homogeneous activesystems, Phys. Rev. E 99(6), 062303 (2019).
16. Nakao, H., Mikhailov, A.S.: Turing patterns in network-organized activator-inhibitor systems. Nat. Phys. 6, 544-550 (2010).
17. Wyller, J., Blomquist, P., Einevoll, G.T.: Turing instabil-ity and pattern formation in a two-population neuronalnetwork model. Phys. D 225, 75-93 (2007).
18. Tian, C.R., Ruan, S.G.: Pattern formation and synchro-nism in an allelopathic plankton model with delay in anetwork, SIAM J. Appl. Dyn. Syst. 18(1), 531-557 (2019).
19. Zheng, Q.Q., Shen, J.W.: Turing instability inducedby random network in FitzHugh-Nagumo model, Appl.Math. Comput. 381, 125304 (2020).
20. Gierer, A., Meinhardt, H.: A theory of biological patternformation, Kybernetik 12, 30-39 (1972).
21. Meinhardt, H., Klingler, M.: A model for pattern forma-tion on the shells of molluscs, J. Theor. Biol. 126, 63-89(1987).
22. Fowlery, D.R., Meinhardtz, H., Prusinkiewicz, P.: Mod-eling seashells, Comput. Graph. 26(2), 379-387 (1992).
23. Wu, R.C., Shao, Y., Zhou, Y., Chen, L.P.: Turing andHopf bifurcation of Giere-Meinhardt activator-substratemodel, Electron. J. Differ. Equations 173, 1-19 (2017).
24. Wang, Y.E., Wu, J.H., Jia, Y.F.: Steady-state bifurcationfor a biological depletion model, Int. J. Bifurcat. Chaos26(4), 1650066 (2016).
25. Kelkel, J. Surulescu, C.: A weak solution approach to areaction-diffusion system modeling pattern formation onseashells, Math. Meth. Appl. Sci. 32, 2267-2286 (2009).
26. Lou, Y., Ni, W.M.: Diffusion, self-diffusion and cross-diffusion, J. Differ. Equations 131(1), 79-131 (1996).
27. Lin, C.S., Ni, W.M., Takagi, I.: Large amplitude station-ary solutions to a chemotaxis system, J. Differ. Equa-tions, 72(1), 1-27 (1988).
28. Kelkel, J., Surulescu, C.: On a stochastic reaction-diffusion system modeling pattern formation on seashells,J. Math. Biol. 60, 765-796 (2010).
29. Watts, D.J., Strogatz, S.H.: Collective dynamics of small-world networks, Nature 393, 440-442 (1998).