Embed Size (px)
Citation preview

Some Applications of WRF/DART
Chris Snyder, National Center for Atmospheric Research Mesoscale and Microscale Meteorology Division (MMM), and Institue for Mathematics Applied to Geoscience (IMAGe)

WRF/DART
Consists of: – Interfaces between WRF and DART (e.g. translate state vector, compute
distances, …) – Observation operators – Scripts to generate IC ensemble, generate LBC ensemble, advance WRF
Easy to add fields to state vector (e.g. tracers, chem species) – Plan to add namelist control of fields in state vector
A few external users (5-10) so far

Nested Grids in WRF/DART
Perform analysis across multiple nests simultaneously – Innovations calculated w.r.t. finest availble grid – All grid points within localization radius updated
D1
D2
D3
.
. obs
obs

Some Applications
Radar assimilation for convective scales – Example courtesy Altug Aksoy (NOAA/HRD)
Assimilation of surface observations – Examples courtesy David Dowell (NCAR) – Also have single-column version of WRF/DART from Josh Hacker (NCAR)
Tropical cyclones – Typhoon Sinlaku (2008) example, courtesy Hui Liu (NCAR)

Radar Assimilation for Convective Scales
Assimilate radial velocity and radar reflectivity.
Convective scale: – O(1 km) horizontal resolution in WRF – Initialize with single sounding and use open lateral boundaries (thereby
ignoring any mesoscale structure in environment) – 2-min assimilation cycle
Crucial to account for uncertainty in sounding.
Clear biases in reflectivity … owing to errors in microphysics?
Analysis quality comparable to standard dual-Doppler retrievals.

Radar Assimilation for Convective Scales
Aksoy et al. (2008) consider four cases – Diverse storm types – Chosen in part based on availability of nearby sounding
Other WRF/DART users are considering additional cases
Storm type Date Location (radar) Supercell 8 May 2003 Oklahoma (KTLX)
Supercell 11 April 2005 Oklahoma (KTLX)
Line, bow echo 15 June 2002 Kansas (KGLD)
Multicell 8 May 2005 Oklahoma (KTLX)
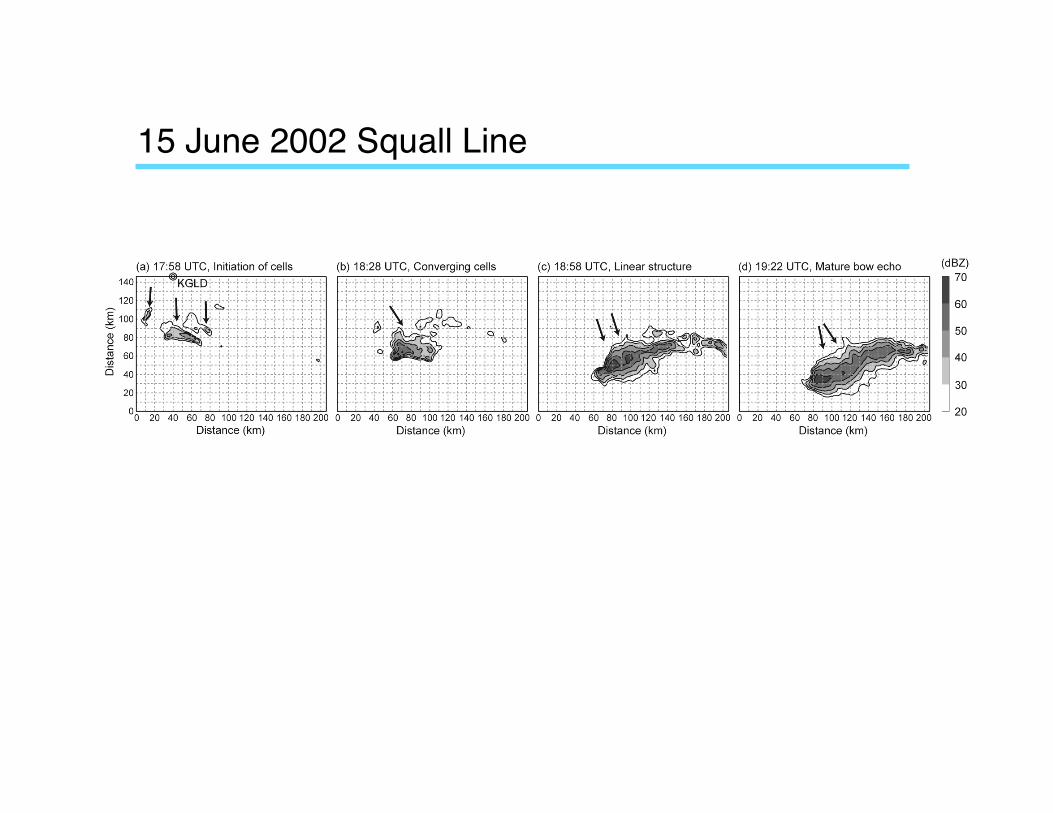
15 June 2002 Squall Line

15 June 2002 Squall Line
Innovation statistics

15 June 2002 Squall Line
Reflectivity analysis 18:56 UTC (after 60 min assimilation)
Differences from observations

15 June 2002 Squall Line (Forecast)
Reflectivity (dBZ) at 0.5° scan angle
Forecast Observed
6 minutes

15 June 2002 Squall Line (Forecast)
Reflectivity (dBZ) at 0.5° scan angle
Forecast Observed
12 minutes

15 June 2002 Squall Line (Forecast)
Reflectivity (dBZ) at 0.5° scan angle
Forecast Observed
16 minutes

15 June 2002 Squall Line (Forecast)
Reflectivity (dBZ) at 0.5° scan angle
Forecast Observed
22 minutes

15 June 2002 Squall Line (Forecast)
Reflectivity (dBZ) at 0.5° scan angle
Forecast Observed
26 minutes

Assimilation of Surface Observations
30-km resolution, CONUS domain
Hourly assimilation of 2-m T, Td and 10-m u,v – Assimilate for 9 h, beginning from 00z NAM analysis as ensemble mean
“Multi-physics” ensemble – Each member uses distinct configuration of WRF – Choose from 3 PBL, 3 cumulus, 2 shortwave radiation – Hope to capture, at least partially, uncertainty of forecast model
Perform ensemble forecasts on subdomain with 3-km resolution
Again, see significant problems from deficiencies in model

Supercells in 3-km Ensemble!0000, 0100, and 0200 UTC 29 March 2007! SPC Storm Reports!
28-29 March 2007: With and Without Surface-Data Assimilation!
no assim + 12-14 hr fcst! 9 hr sfc DA + 3-5 hr fcst!

Supercells in 3-km Ensemble!0000, 0100, and 0200 UTC 29 March 2007! SPC Storm Reports!
28-29 March 2007: With and Without Surface-Data Assimilation!
no assim + 12-14 hr fcst! 9 hr sfc DA + 3-5 hr fcst!

Supercells in 3-km Ensemble!0000, 0100, and 0200 UTC 29 March 2007! SPC Storm Reports!
28-29 March 2007: With and Without Surface-Data Assimilation!
no assim + 12-14 hr fcst! 9 hr sfc DA + 3-5 hr fcst!

Results of Surface-Data Assimilation on 30-km grid: !Water Vapor at 30 m AGL, 2100 UTC 28 March 2007 !
Ensemble-Mean Analysis!with sfc data assimilation!
Analysis Difference:!(ens mean with sfc data assim)!- (ens mean without sfc data assim)!

ensemble-mean T and Td profiles at 1800 UTC 12 June 2002
with sfc DA
without sfc DA 1000 mb
850 mb
700 mb
WRF
ens
embl
e,
no a
ssim
ilatio
n O
bser
vatio
ns
FWD
0000
UTC
WRF
ens
embl
e,
no a
ssim
ilatio
n O
bser
vatio
ns
OUN
000
0 UT
C
6 hr sfc DA + 3 hr fcst
2100 UTC 12 June 2002
too early

• EnKF uses ensemble-estimated vertical covariances to determine how surface observation influences analysis of PBL
• Analysis is biased if forecast profiles all have the wrong shape in ~ same way
surface dewpoint ob
forecast
actual profile
analysis
Surface DA in Presence of Model Bias

Outstanding Issues
Model imperfections, including errors in sub-grid processes — Essential to account for these in mesoscale assimilation — Multi-physics, adaptive inflation, additive noise …
Wish to estimate and predict across range of scales — Require better techniques for covariance localization, or alternate
approach
Nonlinearity and non-Gaussianity — So far, dynamical nonlinearities not alarming — Bigger problems with positive-definite quantities?

References
Bengtsson T., C. Snyder, and D. Nychka, 2003: Toward a nonlinear ensemble filter for high-dimensional systems. J. Geophys. Res., 62(D24), 8775-8785.
Dowell, D., F. Zhang, L. Wicker, C. Snyder and N. A. Crook, 2004: Wind and thermodynamic retrievals in the 17 May 1981 Arcadia, Oklahoma supercell: Ensemble Kalman filter experiments. Mon. Wea. Rev., 132, 1982-2005.
Snyder, C. and F. Zhang, 2003: Assimilation of simulated Doppler radar observations with an ensemble Kalman filter. Mon. Wea. Rev., 131, 1663-1677.
Torn, R. D., G. J. Hakim, and C. Snyder, 2006: Boundary conditions for limited-area ensemble Kalman filters. Mon. Wea. Rev., 134, 2490-2502.
Hacker, J. P., and C. Snyder, 2005: Ensemble Kalman filter assimilation of fixed screen-height observations in a parameterized PBL. Mon. Wea. Rev., 133, 3260-3275.
Caya, A., J. Sun and C. Snyder, 2005: A comparison between the 4D-Var and the ensemble Kalman filter techniques for radar data assimilation. Mon. Wea. Rev., 133, 3081-3094.
Chen, Y., and C. Snyder, 2007: Assimilating vortex position with an ensemble Kalman filter. Mon. Wea. Rev., 135, 1828-1845.
Anderson, J. L., 2007: An adaptive covariance inflation error correction algorithm for ensemble filters. Tellus A, 59, 210-224.
Snyder, C. T. Bengtsson, P. Bickel and J. L. Anderson, 2008: Obstacles to high-dimensional particle filtering. Mon. Wea. Rev., accepted.
http://www.mmm.ucar.edu/people/snyder/papers/


EnKF Applied to Convective Storms
Model and EnKF details – Open lateral BCs, no terrain or PBL, Lin et al. microphysics – Horizontal resolution 2 km, vertical resolution 500 m – ~ 2 min cycling … assimilate scan at each elevation angle separately – 50 members
Observations – Radial velocity and reflecitivity on each elevation angle – Removal of clutter, other simple QC from Dowell/NSSL package – Obs on each elevation angle pre-processed to ~ model grid in horizontal – Distinguish reflectivity > 5 dBZ (precip) from < 5 dBZ (clear air)
Automated velocity unfolding within EnKF

15 June 2002 Squall Line (Forecast) Reflectivity (dBZ) at 2.4° scan angle (24-min forecast)

15 June 2002 Squall Line (Sounding Perturbations)
U Component V Component

15 June 2002 Squall Line (Sounding Perturbations)
Innovation statistics – impact of perturbing the sounding

15 June 2002 Squall Line (Sounding Perturbations)
Reflectivity (dBZ) at 4.3° scan angle (60-min analysis, 18:56 UTC)
Without Sounding Pert. With Sounding Pert.

Ensemble Initialization
ICs include random temperature perturbations – Restricted to neighborhood of first echoes to be assimlated
Uncertainty in sounding/environment – (u,v) sounding for each member includes noise in three gravest vertical
modes, with variance 2 m/s in each mode – At present, not perturbing θ or moisture

Comparison of EnKF and 4DVar
• Simulated observations of radial velocity and reflectivity for supercell storm (perfect model), available every 5 min
• 4DVar: full fields (not incremental), mesoscale background, simple covariance model, 10-min window
• EnKF: 100 members, initialized with noise in T where first scan shows reflectivity
Caya, A., J. Sun and C. Snyder, 2005: A comparison between the 4D-Var and the ensemble Kalman filter techniques for radar data assimilation. Mon. Wea. Rev., 133, 3081--3094.


Comparison of EnKF and 4DVar
Kalman filter/smoother and 4DVar are mathematically equivalent for linear, Gaussian systems – Result also assumes both use same P, R, etc.
Overall, EnKF and 4DVar perform comparably in this case
After multiple cycles (30-40 min), EnKF beats 4DVar – EnKF propagates information from previous obs through cycling of Pf – In principle, updating of P could be included in 4DVar too
Given only obs over limited period (10-20 min), 4DVar beats EnKF – Estimation errors large with limited obs, so nonlinear effect more important
and 4DVar has advantage?

Mesoscale and Storm-Scale Ensemble Forecasts!
surface ob site!
regional (storm-scale)!"domain (Δx=3 km)!
mesoscale domain!"(Δx=30 km)!
30-km ensemble provides initial and boundary conditions for 3-km ensemble!

Appeal of Ensemble Filters for Mesoscale DA
General covariance model • Independent of assumptions about nature of flow (e.g. approximate
geostrophic balance), applicable across variety of dynamical regimes
Basis for probabilistic forecasts • For convective storms, 1 hour is a long-range forecast
Ease of implementation and maintenance • Doesnʼt require adjoints for sub-grid schemes, which are crucial in these
flows but often discontinuous or highly nonlinear • … or adjoints of complex observation operators (e.g. radar) • See http://www.met.tamu.edu/people/faculty/fzhang/EnDA2006/
Straightforward application to domains with multiple nests

Nonlinearity and non-Gaussianity
EnKF uses only second moments; can find non-Gaussian examples where EnKF is not effective.
At same time, EnKF is not strictly a “Gaussian” method – Can find examples where resampling from same mean and covariance as
EnKF posterior does much worse than EnKF (Bengtsson et al. 2003) – EnKF thus preserves some useful information about higher moments
Particle filters are a fully general, non-parametric approach. – But they fail in high dimensions unless sample size is v. large (Snyder et al.
2008)
Is there a way to perform spatially local updates in nonlinear ensemble filters, as in the EnKF?





























