Embed Size (px)
DESCRIPTION
Sistemas de control
Citation preview

Por: Raúl R. Roque Yujra 1
UNIVERSIDAD MAYOR DE SAN ANDRES FACULTAD DE INGENIERIA
CARRERA DE INGENIERIA ELECTRÓNICA
EJERCICIOS RESUELTOS SISTEMAS DE CONTROL I
AUTOR : RAUL ROQUE YUJRA
LA PAZ - BOLIVIA

Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 2
Problema 1 Considere el sistema eléctrico de la figura 1.a) Determine su modelo matemático. b) Encontrar la representación en espacio de estados considerando que los estados son )(11 tix = , )(22 tix = y )(3 tvx c= , la señal de entrada es iv y la señal
de salida es 0v .
+
-
1R
2R
2L
C
1L
1i0vcv
2i+
-
+
-iv ci
Fig. 1. Sistema Eléctrico
Resolución Mediante las leyes de voltajes de Kirchoff se tiene las siguientes relaciones:
ci vdtdi
LiRv ++= 1111
(1)
02
2 vdtdi
Lvc += (2)
A demás por la ley de corrientes:
21 iii c += (3)
por otro lado:
2
02 R
vi = y
dtdv
Ci cc = ;
entonces se que el modelo matemático está definido por :
ic vviRdtdi
L =++ 111
1 (4)
cvvdtdi
L =+ 02
2 (5)
12 iidtdv
C c =+ (6)
b) En vista a las consideraciones iniciales y a las ecuaciones (4), (5) y (6) se tiene :
uL
xL
xLR
x1
31
11
11
11+−−=& ;
(7)
32
22
22
1x
Lx
LR
x +−=& ; (8)
21311
xC
xC
x −=& ; (9)
Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 3
rescribiendo en el espacio de estados:
u
x
xx
CC
LLR
LLR
x
xx
+
−
−
−−
=
0
01
011
10
10
3
2
1
22
2
11
1
3
2
1
&
&
&
;
(10)
[ ]
=
3
2
1
2 00
x
xx
Ry ;
(11)
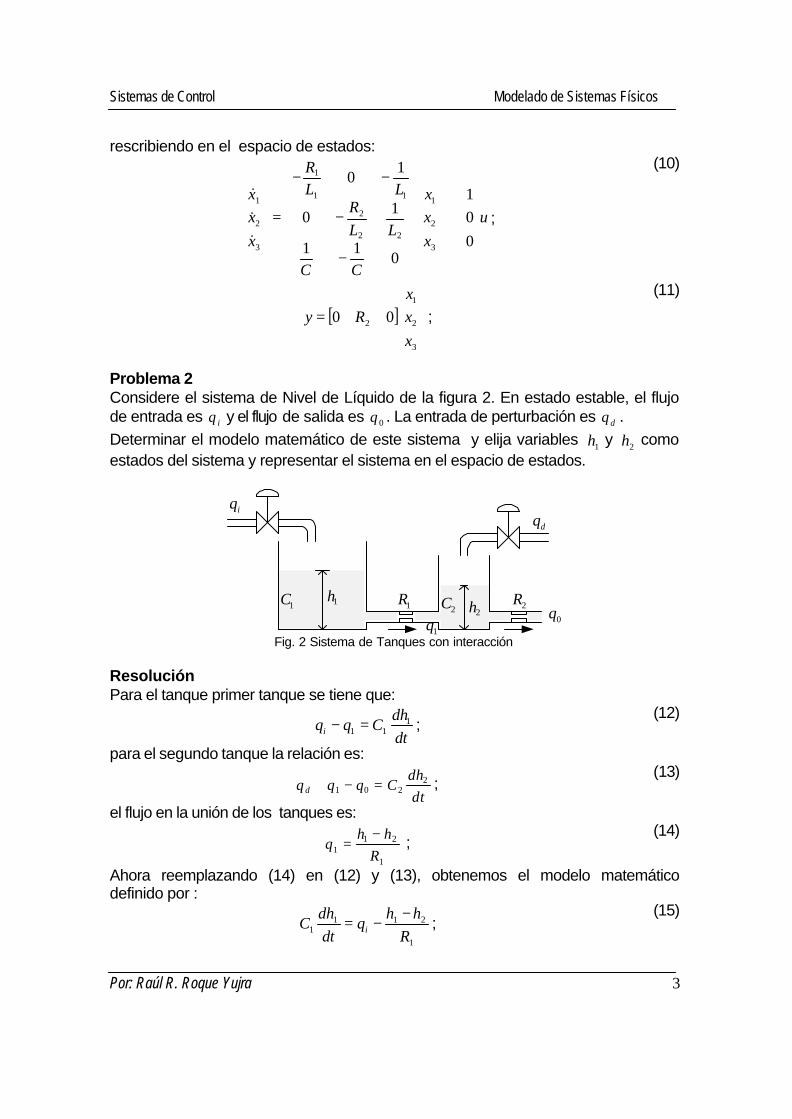
Problema 2 Considere el sistema de Nivel de Líquido de la figura 2. En estado estable, el flujo de entrada es iq y el flujo de salida es 0q . La entrada de perturbación es dq .
Determinar el modelo matemático de este sistema y elija variables 1h y 2h como estados del sistema y representar el sistema en el espacio de estados.
2h1h1C
2C1R 2R
iqdq
0q1q
Fig. 2 Sistema de Tanques con interacción Resolución Para el tanque primer tanque se tiene que:
dtdh
Cqqi1
11 =− ; (12)
para el segundo tanque la relación es:
dtdh
Cqqq d2
201 =−+ ; (13)
el flujo en la unión de los tanques es:
1
211 R
hhq
−= ;
(14)
Ahora reemplazando (14) en (12) y (13), obtenemos el modelo matemático definido por :
1
2111 R
hhq
dtdh
C i
−−= ; (15)

Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 4
01
2122 q
Rhh
qdt
dhC d −
−+= ;
(16)
para la representación del sistema en el espacio de estados, se toma en cuenta la siguiente relación:
2
20 R
hq = ;
(17)
entonces se tiene:
iqC
xCR
xCR
x111
221
111
1 ++−=& ; (18)
dqC
xCRCR
xCR
x2
22221
121
21111 +
+−=& ;
(19)
o de forma matricial:
+
−−
−=
2
1
2
1
2
1
222121
1111
2
1
10
01
111
11
u
u
C
Cx
x
CRCRCR
CRCRx
x&
&;
(20)
=
2
1
2
10
x
x
Ry ;
(21)
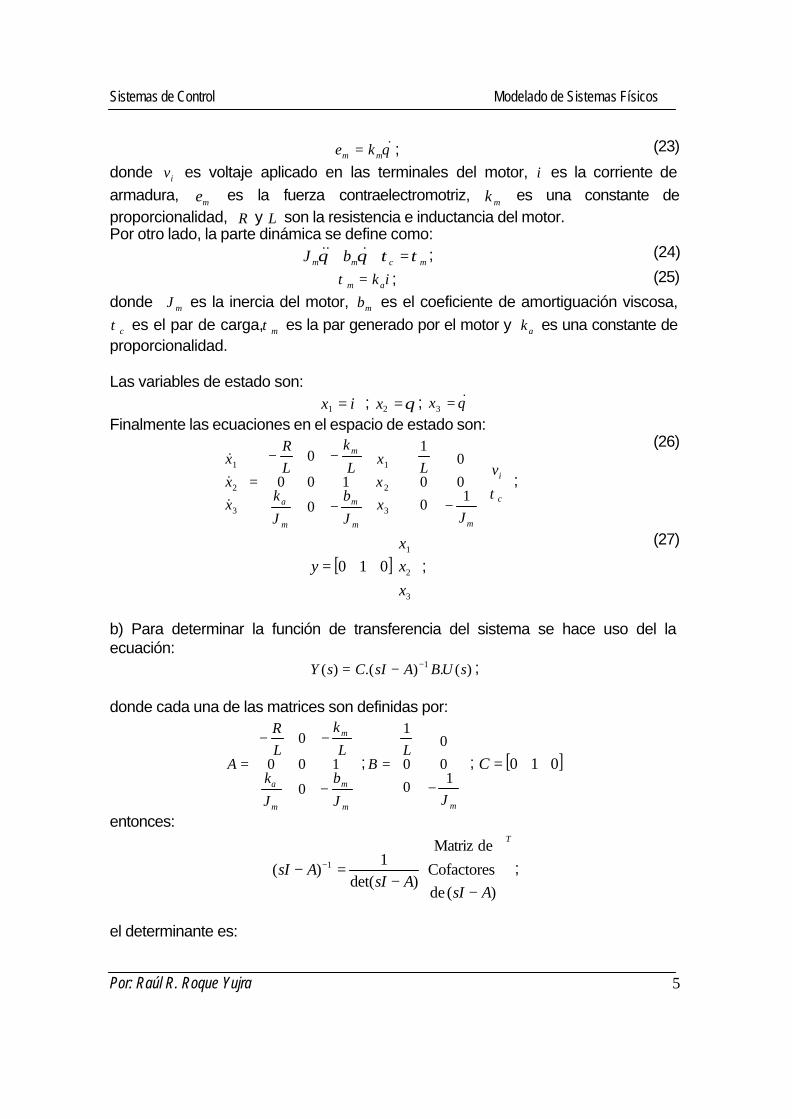
Problema 3 Sea el sistema electromecánico que representa a un motor de CD imán permanente, manejado por un voltaje iv aplicado al motor y a su eje se conecta un
par de carga cτ . La salida del sistema es la posición θ. Determine su representación en el espacio de estados. b) Con a) determine la función de transferencia del sistema.
mJ
mb
R L
i +
-me θ ω mτ
cτiv+
-
Fig.3 Motor de CC de imán permanente
Resolución Para la parte eléctrica del sistema:
mi edtdi
LRiv ++= ; (22)
Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 5
θ&mm ke = ; (23)
donde iv es voltaje aplicado en las terminales del motor, i es la corriente de
armadura, me es la fuerza contraelectromotriz, mk es una constante de proporcionalidad, R y L son la resistencia e inductancia del motor. Por otro lado, la parte dinámica se define como:
mcmm bJ ττθθ =++ &&& ; (24)
ikam =τ ; (25)
donde mJ es la inercia del motor, mb es el coeficiente de amortiguación viscosa,
cτ es el par de carga, mτ es la par generado por el motor y ak es una constante de proporcionalidad. Las variables de estado son:
ix =1 ; θ=2x ; θ&=3x Finalmente las ecuaciones en el espacio de estado son:
−
+
−
−−
=
c
i
mm
m
m
a
m
v
J
L
x
x
x
J
b
J
k
L
k
LR
x
x
x
τ10
0
0
0
1
0
100
0
3
2
1
3
2
1
&
&
&
;
(26)
[ ]
=
3
2
1
010
x
xx
y ;
(27)
b) Para determinar la función de transferencia del sistema se hace uso del la ecuación:
)(.).()( 1 sUBAsICsY −−= ;
donde cada una de las matrices son definidas por:
−
−−
=
m
m
m
a
m
J
b
J
k
L
k
LR
A
0
100
0
;
−
=
mJ
LB
10
0
0
0
1
; [ ]010=C
entonces: T
AsIAsI
AsI
−−
=− −
)( de Cofactores
de Matriz
)det(1
)( 1 ;
el determinante es:

Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 6
LJkk
sJb
ssLR
sAsIm
ma
m
m +
+
+=− )det( ;
(28)
[ ]ammmm
kkbsJRLsLJ
sAsI +++=− ))(()det( ;
(29)
por su parte la matriz de cofactores:
+
++
+
+
+
=
LR
ssJ
ks
LR
sLJ
kk
J
bs
LR
sJ
kL
ks
Jb
ss
a
m
ma
m
ma
m
m
m
T
0
0
A)-(sI
de Cofactores
de Matris;
(30)
[ ] [ ]
Τ
−
−+++
=c
i
m
T
ammm
m V
J
L
AsIkkbsJRLss
LJs
10
0
0
0
1
)(
cofactores
de Matriz
))((010)(θ ;
(31)
realizando las operaciones de multiplicación de matrices:
[ ] [ ]
Τ
+−
+−
−
+
+++=
)(
)
)(
1010
))(()(
s
sV
LR
sJs
LR
sJ
LJk
s
LJk
s
LJk
Jb
sLs
kkbsJRLssLJ
sc
i
m
m
m
m
m
a
m
a
m
m
ammm
mθ ;
32
Finalmente, la función de transferencia del sistema es:
[ ] [ ] )())((
)())((
)( skkbsJRLss
RLssV
kkbsJRLssk
s cmamm
imamm
a Τ+++
+−+++
=θ ; (33)

Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 7
Problema 4 Sea el sistema de orientación de satélite de la figura 4, donde θ es la posición angular deseada, l es la distancia del eje del propulsor al centro de masa del satélite, β es el ángulo de efecto de control, la variación del ángulo β es proporcional a la señal de control u , R es una constan te que representa una cierta ganancia estática del actuador que convierte el control u en velocidad de variación del ángulo β y J es la inercia efectiva del satélite. Determinar la representación del sistema en el espacio de estados. b) Hallar los puntos de equilibrio y linealizar el sistema alrededor de dichos puntos.
l
β
θ
CM
Orientaciónde
ReferenciaOrientaciónDeseada
F
Fig. 4 Sistema de orientación de Satélite
Resolución Las ecuaciones diferenciales que rigen el movimiento del sistema se obtienen de la segunda ley de Newton:
lFaplicadonetoTorqueJ *)sin(brazo x Fuerza βθ ===&& ; o en forma compacta:
)sin( βθ FlJ =&& ; el ángulo β crece o decrece, de acuerdo al control aplicado mediante la ley de variación:
Rudtd
=β ;
las variables d estado se escogen como: θ=1x ; θ&=2x y β=3x ;
Entonces el sistema no lineal se describe de la siguiente manera en el espacio de estados:
),...,,(),...,,( 2121 iiii xxxugxxxfx +=& ; ni ,...2,1= es decir:
21 xx =& ;
)sin( 32 xJFl
x =& ;

Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 8
Rux =3& ; b) El punto de equilibrio físicamente significativo del sistema, se obtiene igualando a cero el miembro derecho de cada ecuación de estado. Este resulta ser:
arbitrariox =1 ; 02 =x ; 03 =x y 0=u se tiene que la forma lineal es:
BuAxx +=& ; donde:
ei xxJA == | ;
para linealizar el sistema alrededor de estos puntos se determina la matriz Jacobiana del sistema, es decir:
=
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
==
000
00
010
000
)cos(00
010
3
3
3
2
3
1
3
3
2
2
2
1
2
3
1
2
1
1
1
JFl
xJFl
xf
xf
xf
xf
xf
xf
xf
xf
xf
JA A ;
=
∂∂∂∂∂∂
==
R
ugugug
JB B 0
0
1
3
1
2
1
1
;
[ ]001=C ; la representación lineal en el espacio de estados es:
u
Rx
x
x
JFl
x
x
x
+
=
0
0
000
00
010
3
2
1
3
2
1
&
&
&
;
[ ]
=
3
2
1
001
x
xx
y ;
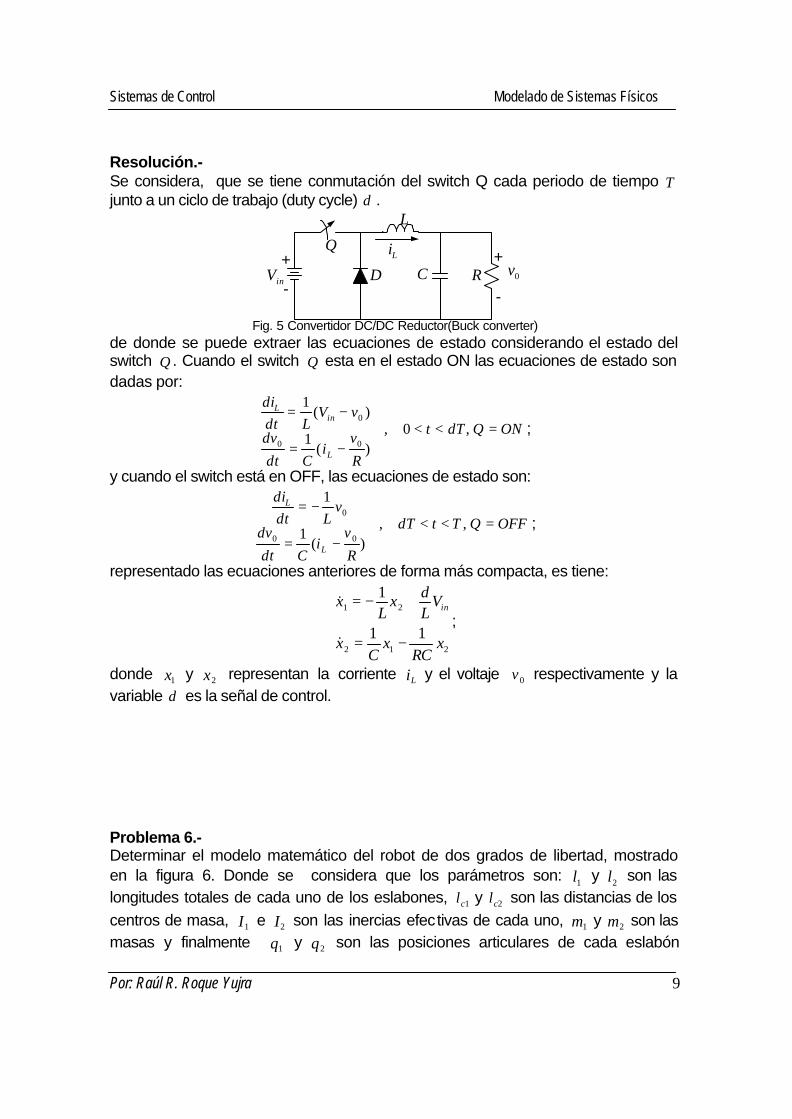
Problema 5.- Sea el convertidor DC/DC reductor (Buck converter) representado en la figura 5, Determinar el modelo matemático de ducho sistema.
Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 9
Resolución.- Se considera, que se tiene conmutación del switch Q cada periodo de tiempo T junto a un ciclo de trabajo (duty cycle) d .
L
C RinV
Q
D 0v+
-
+
-
Li
Fig. 5 Convertidor DC/DC Reductor(Buck converter)
de donde se puede extraer las ecuaciones de estado considerando el estado del switch Q . Cuando el switch Q esta en el estado ON las ecuaciones de estado son dadas por:
ONQdTt
R
vi
Cdt
dv
vVLdt
di
L
inL
=<<−=
−=,0,
)(1
)(1
00
0;
y cuando el switch está en OFF, las ecuaciones de estado son:
OFFQTtdT
R
vi
Cdt
dv
vLdt
di
L
L
=<<−=
−=,,
)(1
1
00
0;
representado las ecuaciones anteriores de forma más compacta, es tiene:
212
21
11
1
xRC
xC
x
VLdx
Lx in
−=
+−=
&
&;
donde 1x y 2x representan la corriente Li y el voltaje 0v respectivamente y la variable d es la señal de control. Problema 6.- Determinar el modelo matemático del robot de dos grados de libertad, mostrado en la figura 6. Donde se considera que los parámetros son: 1l y 2l son las longitudes totales de cada uno de los eslabones, 1cl y 2cl son las distancias de los
centros de masa, 1I e 2I son las inercias efectivas de cada uno, 1m y 2m son las masas y finalmente 1q y 2q son las posiciones articulares de cada eslabón

Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 10
referido al sistema referencial de base y además se tiene en cada articulación torques de control 1τ y 2τ .
1l
1cl
2l
2cl
y
x
2q
1q11,mI
22 , mI
Fig.6 Estructura del Robot de dos grados de Libertad
Considérese un robot manipulador de dos grados de libertad de la figura 6, se utiliza el método de Lagrange para determinar, la dinámica del robot. Suponiendo que existe rigidez en las articulaciones y eslabones; también la no existencia de fenómenos de fricción ni elasticidad; se procede a determinar las energías cinética y potencial de todo el sistema. La energía cinética total de la estructura es:
++++= 2212
2111
211 )(
21
21
21
qqIqlmqIE cc &&&&
[ ]2211212
2122
21
212 cos)(2)(
21
qqqqllqqlqlm cc &&&&&& +++++ ;
y la energía potencial se define como:
)sin()sin()sin( 2122112111 qqlgmqlgmqlgmE ccp +++= ;
El Lagrangiano L del robot, es la diferencia de la energía cinética y la energía potencial, entonces:
[ ]+++++++= 221
22
21
212
2212
2111
211 )(
21
)(21
21
21
qqlqlmqqIqlmqIL cc &&&&&&&
)sin()sin()sin(cos)( 21221121112211212 qqlgmqlgmqlgmqqqqllm ccc +−−−++ &&& ;
Las ecuaciones del movimiento de Lagrange para un robot de dos grados de libertad están dadas por:
111
τ=∂∂−
∂∂
qL
qL
dtd
&;
222
τ=∂∂−
∂∂
qL
qL
dtd
&;

Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 11
donde 1τ y 2τ son los torques que actúan en las articulaciones 1 y 2 , ahora se realiza el cálculo de cada uno de los términos como sigue:
[ ])cos()2()()()( 221212122
21122121
2111
1
qqqllqqllqmqqIqlmIqL
ccc &&&&&&&&&
++++++++=∂∂ ;
[ ])cos()()( 212121222212
2
qqllqqlmqqIqL
cc &&&&&&
++++=∂∂ ;
derivando respecto al tiempo:
[ ]+++++++=∂∂
)()()()( 2122
21122121
2111
1
qqllqmqqIqlmIqL
dtd
cc &&&&&&&&&&&&&
)sin()2()cos()2( 2222121221212 qqqqllqqqllm cc &&&&& +−++
[ ])sin()cos()()()( 22121212121222212
1
qqqllqqllqqlmqqIqL
dtd
ccc &&&&&&&&&&&&
−++++=∂∂ ;
la derivada parcial respecto a cada posición es:
)cos()cos()cos( 21221121111
qqglmqglmqglmqL
cc +−−−=∂∂ ;
)cos()sin()( 21222112122
qqgmlqqqqllmqL
cc +−+−=∂∂
&&& ;
reemplazando las ecuaciones se obtiene : [ ] [ ] −++++++++ 2221
2222121221
22
212
211 ))cos(())cos(2( qqlllmIqIIqllllmlm ccccc &&&&
121221121122122221 )cos()cos()()sin()2( τ=+++++− qqglmqglmlmqllmqqq ccc&&&
[ ] [ ] ++++++ )sin()cos( 221212
222212212
2222 qqllmlmIqqllmlmI cccc &&&
22122 )cos( τ=++ qqglm c ; expresando este par de ecuaciones diferenciales, en la forma matricial:
τ=++ )(),()( qGqqqCqqD &&&& ;
=
+
+
2
1
2
1
2
1
2221
1211
2
1
2221
1211
τ
τ
g
g
q
q
cc
cc
q
q
dd
dd&
&
&&
&&;
la matriz de inercias )(qD es definida por los elementos;
2122122
212
21111 ))cos(2( IIqllllmlmd ccc +++++= ;
222122212 ))cos(( Iqlllmd cc ++= ;
222122221 ))cos(( Iqlllmd cc ++= ;
222222 Ilmd c += ;
los elementos de la matriz ),( qqC & de fuerzas centrípetas y de Coriolis son:
)sin( 2221211 qqllmc c &−= ;
)sin()( 22121212 qqqllmc c && +−= ;
)sin( 2121221 qqllmc c &= ;
;022 =c

Sistemas de Control Modelado de Sistemas Físicos
Por: Raúl R. Roque Yujra 12
y pares gravitacionales )(qG : )cos()cos()cos( 21221121111 qqglmqglmqglmg cc +++= ;
)cos( 21222 qqglmg c += ;
de esta forma se ha determinado el modelo del robot planar de dos grados de libertad. Problema 7 Determinar la Función de transferencia del sistema representado mediante grafos de flujo de señal de la figura.
a
ihg
f
edcb
Solución La función de transferencia del sistema según la Regla de Mason es:
∑ ∆∆
=k
kkPP1 ;
donde kP es la ganancia de trayectoria de la ésimak − trayectoria directa, ∆ es el
determinante del grafo y k∆ se obtiene a partir de ∆ , al quitar los lazos que tocan
la trayectoria kP . Entonces: 1) Se identifican los lazos:
a
ihg
f
edcbbgG =1
a
ihg
f
edcb chG =2

Sistemas de Control Regla de Mason
Por: Raúl R. Roque Yujra 13
a
ihg
f
edcb ciG =3
a
ihg
f
edcb fghiG =4
2). El determinante ∆ queda definido por:
( ) ( )3143211 GGGGGG ++++−=∆ ; 3). Identificación de trayectorias
a
ihg
f
edcbabcdeP =1
11 =∆
a
ihg
f
edcbafeP =2
22 1 G−=∆
finalmente se tiene que la función de transferencia es:
bcgifghicichbcchafeabcde
PP k
kk
++++−−+
=∆
∆=
∑)(1)1( ;
Problema 8
Obtenga la respuesta de un sistema con realimentación unitaria ante una rampa unitaria, siendo la función de transferencia de lazo abierto del sistema:
)6(4
)(+
=ss
sG

Sistemas de Control Análisis de Respuesta en el Tiempo
Por: Raúl R. Roque Yujra 14
Solución. La función de transferencia enlazo cerrado con realimentación unitaria será: La función de transferencia será:
)(1)(
)(sG
sGsH
+= ;
)6(4
1
)6(4
)(
++
+=
ss
sssH
por lo tanto:
464
)( 2 ++=
sssH
La entrada será una rampa 2
1)(
ssR =
22
146
4)(
ssssC
++=
Separando por fracciones parciales:
)53(20
571523
1
)53(20
5715
)(2 −+
+−
+−
++++
+−
−=ssss
sC
aplicando la transformada inversa de Laplace:
( )tt eestC )53()53(
205715
23)( +−−− −+−+−=

Sistemas de Control Análisis de Respuesta en el Tiempo
Por: Raúl R. Roque Yujra 15
Time (sec.)
Am
plitu
de
Step Response
0 1 2 3 4 5 6 7 80
1
2
3
4
5
6
7
Problema 9 Considere la respuesta al escalón unitario de un sistema de control de realimentación unitaria cuya función de transferencia de lazo abierto es:
)7(7
)(+
=ss
sH
Obtenga el tiempo de crecimiento, el tiempo pico, el máximo sobrepaso y el tiempo se establecimiento.
Solución. De la forma general:
Comparando tenemos:
646.27 ==nω ;
323.127 ==ξ ;
La solución en el dominio del tiempo es:
−
−+=
−−
212
21
121)(
se
se
tCtsts
n
ξ
ω
Siendo:
ns ωξξ )1( 21 −+= ns ωξξ )1( 2
2 −−= ; reemplazando:

Sistemas de Control Análisis de Respuesta en el Tiempo
Por: Raúl R. Roque Yujra 16
79.51 =s y 1.12 =s ;
Como vemos s1 es comparablemente mayor a s2, por lo tanto podemos despreciar el efecto de s1, quedando:
tsetc 21)( −−= La grafica de ambas funciones es:
Time (sec.)
Am
pli
tud
e
Step Response
0 1 2 3 4 5 6 70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Como se observa en la, consideración anteriormente hecha es aceptable, ya que la diferencia es mínima. Con esto podemos analizar de la siguiente manera: Tiempo de levantamiento, Como el sistema es sobreamortiguado el tiempo tr se
calculará con el tiempo del 10% al 90%.
%)10(%)90( tttr −= ;
−=
9.01.0
ln1
2str ;
tr = 1.83 s ; Tiempo de retardo, el tiempo de retardo para un sistema sobreamortiguado es:
dtse 215.0 −−= ; despejando td tenemos:
)5.0ln(1s
td −= ;

Sistemas de Control Análisis de Respuesta en el Tiempo
Por: Raúl R. Roque Yujra 17
reemplazando: td = 0.58 s
Tiempo de establecimiento, Para un error en estado estacionario del 2%, tenemos:
tsse 2102.0 −−= ; despejando ts tenemos:
)02.0ln(1s
ts −=
Reemplazando: ts = 3.26 s
En un sistema sobreamortiguado no existen los parámetros de tiempo pico y máximo sobrepaso. Problema 10 Considere el sistema de la figura:
+- )8(16
+ss
ks23 +
Determine el valor de k de modo que la relación de amortiguamiento ξ sea 0.5, el tiempo de crecimiento, tiempo pico? Solución . La función de transferencia del sistema será:
)23()8(
161
)8(16
)()(
)(ks
ss
sssCsR
sH+
++
+==
48)328(48
31
)( 2 +++=
kssH
Como se pide un ξ menor a 1, entonces el caso es subamortiguado, por lo que las siguientes relaciones son válidas:
drt ω
βπ −= ; Tiempo de levantamiento

Sistemas de Control Análisis de Respuesta en el Tiempo
Por: Raúl R. Roque Yujra 18
dpt
ωπ= ; Tiempo pico
21 ξ
ξπ
−−
= eM p ; Máximo sobrepaso
nst ξω
4= ; Tiempo de establecimiento (2%)
siendo:
−=
ξξ
β21
arccos
21 ξωω −= nd De la función de transferencia podemos obtener los siguientes parámetros simplemente por comparación:
ωn = 6.93 ξ = 0.5
k = 0.033 Reemplazando estos valores tenemos:
ωd = 6.0 rad/s tr = 0.39 s tp = 0.52 s
Mp = 16.3 % ts = 1.15 s
La gráfica se muestra a continuación:

Sistemas de Control Análisis de Respuesta en el Tiempo
Por: Raúl R. Roque Yujra 19
Time (sec.)
Am
plitu
de
Step Response
0 0.4 0.8 1.2 1.60
0.05
0.1
0 .15
0.2
0 .25
0.3
0 .35
0.4

Sistemas de Control Lugar de Raíces
Por: Raúl R. Roque Yujra 20
Problema 12 Sea la función de transferencia de un sistema:
)5)(3)(1)(208(54)(
2
2
+++++++=
ssssssssG ;
determinar el lugar de raíces de dicho sistema. Solución.- 1.- Determinar los lugares geométricos de las raíces sobre el eje real, para ello se utiliza la condición de ángulo.
Im
Re
2
1
-1
-2
-1-3-5
Fig. 6 Posible lugar de Raíces
2.- Determinar las asíntotas del Lugar Geométrico de las Raíces:
mnk
−+°
±=)12(180
θ ; ,...2,1,0=k
con =n número de polos y =m número de ceros, entonces:
)12(603
)12(180+°=
+°±= k
kθ ;
°= 600θ , °= 1801θ , °= 3002θ 3.- Determinar la intersección de las asíntotas con el eje real.
mn
cerospolos
−−
= ∑ ∑σ ;
entonces:
67.43
1425
)22()44531(−=−=
−+−++++
=σ
Hasta aquí se tiene la siguiente grafica
Sistemas de Control Lugar de Raíces
Por: Raúl R. Roque Yujra 21
Im
Re
2
1
-1
-2
-1-3-5
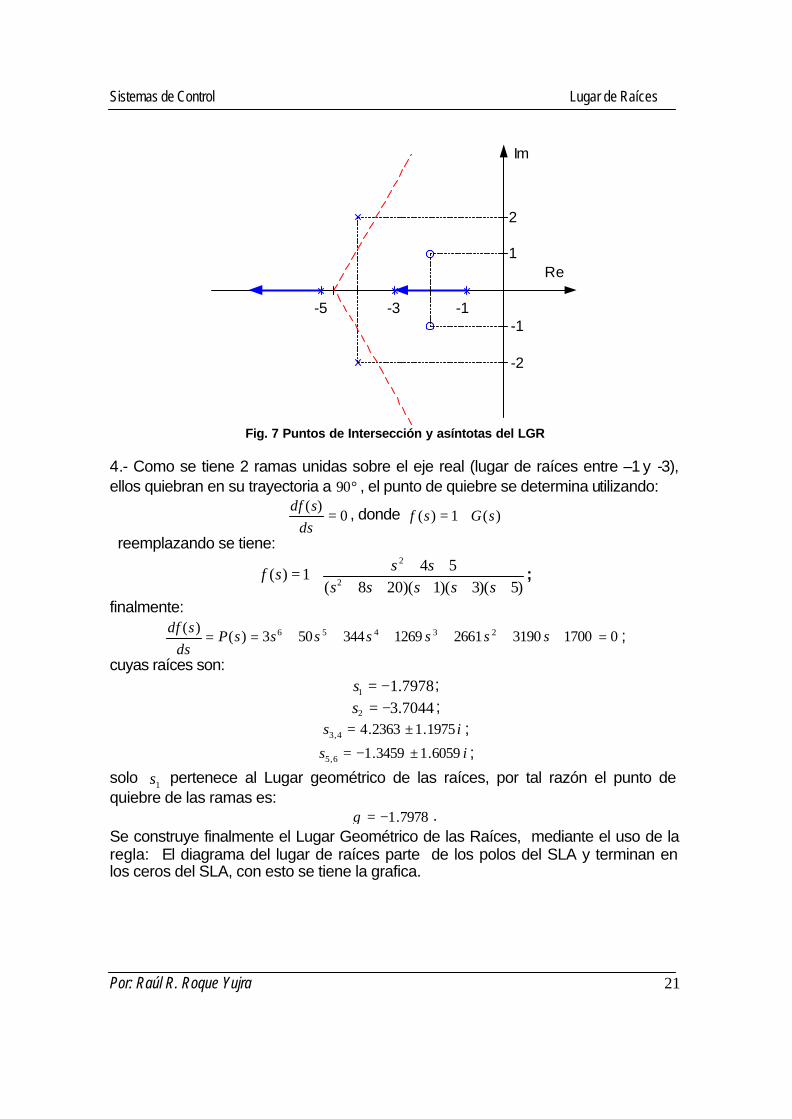
Fig. 7 Puntos de Intersección y asíntotas del LGR
4.- Como se tiene 2 ramas unidas sobre el eje real (lugar de raíces entre –1 y -3), ellos quiebran en su trayectoria a °90 , el punto de quiebre se determina utilizando:
0)(
=ds
sdf , donde )(1)( sGsf +=
reemplazando se tiene:
)5)(3)(1)(208(541)(
2
2
++++++++=
ssssssssf ;
finalmente:
01700319026611269344503)()( 23456 =++++++== sssssssP
dssdf ;
cuyas raíces son: 7978.11 −=s ;
7044.32 −=s ; is 1975.12363.44,3 ±= ;
is 6059.13459.16,5 ±−= ;
solo 1s pertenece al Lugar geométrico de las raíces, por tal razón el punto de quiebre de las ramas es:
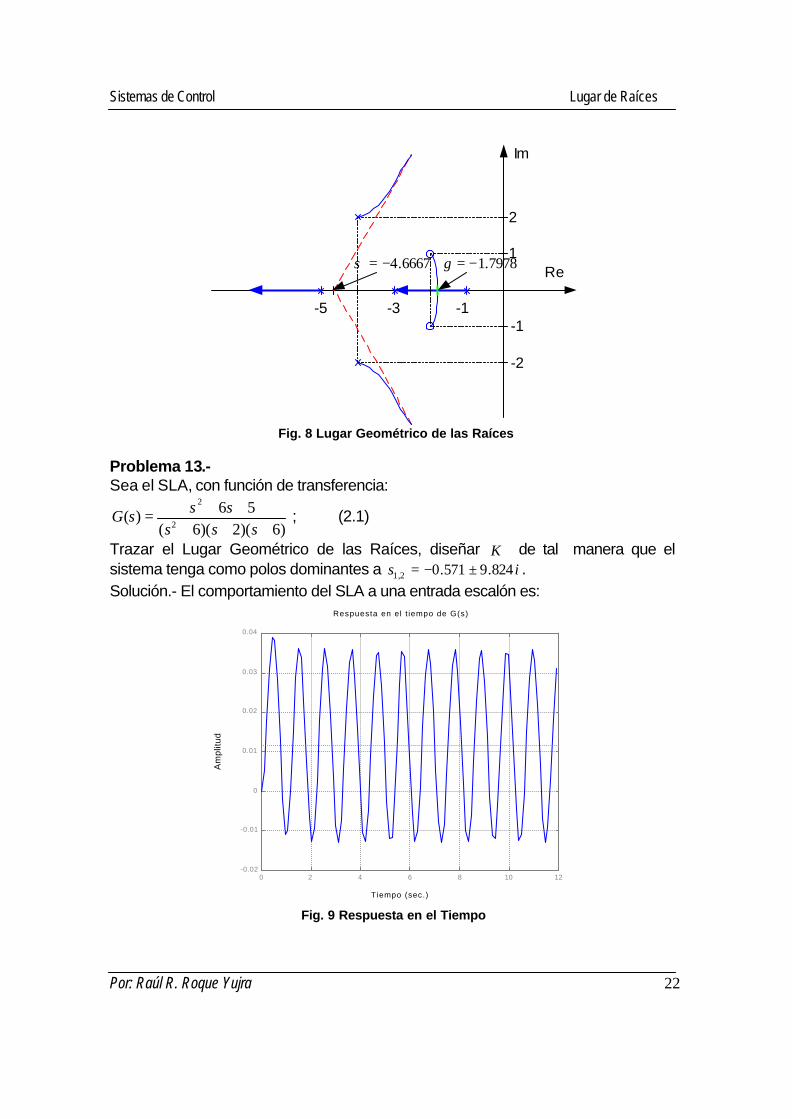
7978.1−=γ . Se construye finalmente el Lugar Geométrico de las Raíces, mediante el uso de la regla: El diagrama del lugar de raíces parte de los polos del SLA y terminan en los ceros del SLA, con esto se tiene la grafica.
Sistemas de Control Lugar de Raíces
Por: Raúl R. Roque Yujra 22
Im
Re
2
1
-1
-2
-1-3-5
7978.1−=γ6667.4−=σ
Fig. 8 Lugar Geométrico de las Raíces
Problema 13.- Sea el SLA, con función de transferencia:
)6)(2)(6(56)(
2
2
+++++=
ssssssG ; (2.1)
Trazar el Lugar Geométrico de las Raíces, diseñar K de tal manera que el sistema tenga como polos dominantes a is 824.9571.02,1 ±−= . Solución.- El comportamiento del SLA a una entrada escalón es:
Tiempo (sec.)
Am
plit
ud
Respuesta en el t iempo de G(s)
0 2 4 6 8 10 12-0.02
-0.01
0
0.01
0.02
0.03
0.04
Fig. 9 Respuesta en el Tiempo
Sistemas de Control Lugar de Raíces
Por: Raúl R. Roque Yujra 23
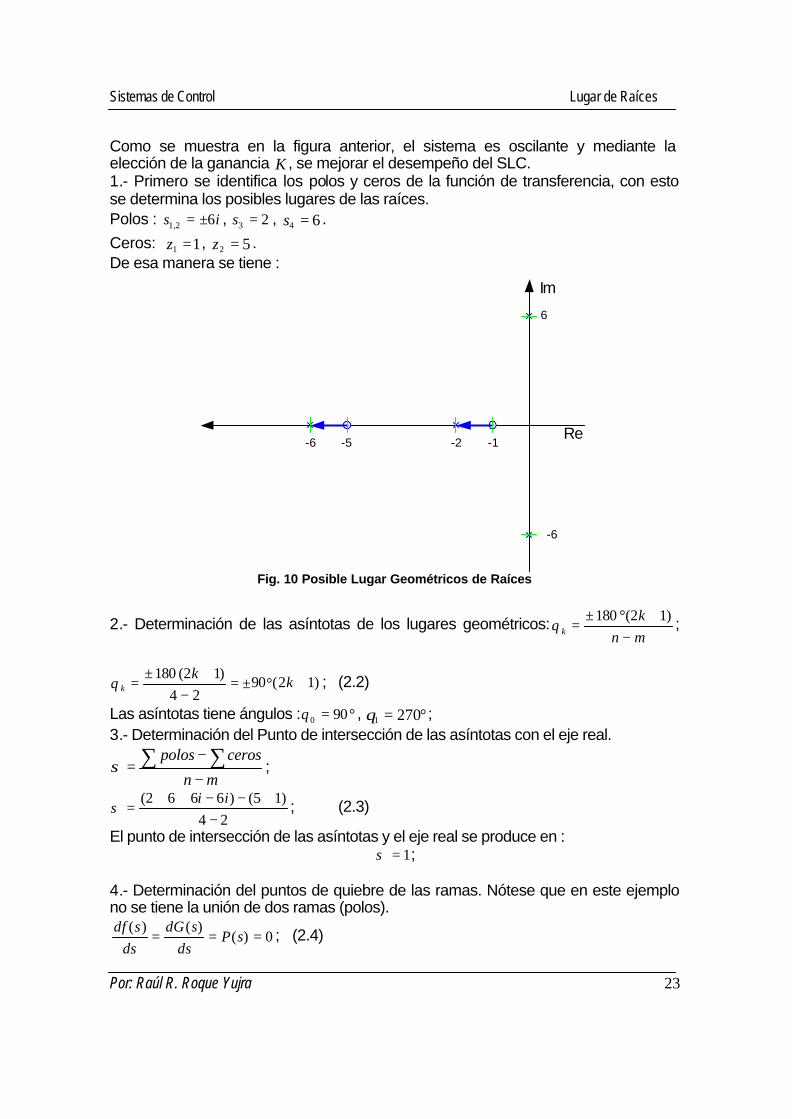
Como se muestra en la figura anterior, el sistema es oscilante y mediante la elección de la ganancia K , se mejorar el desempeño del SLC. 1.- Primero se identifica los polos y ceros de la función de transferencia, con esto se determina los posibles lugares de las raíces. Polos : is 62,1 ±= , 23 =s , 64 =s .
Ceros: 11 =z , 52 =z . De esa manera se tiene :
Im
Re
6
-6
-1-2-5-6
Fig. 10 Posible Lugar Geométricos de Raíces
2.- Determinación de las asíntotas de los lugares geométricos:mnk
k −+°±
=)12(180
θ ;
)12(9024
)12(180+°±=
−+±
= kk
kθ ; (2.2)
Las asíntotas tiene ángulos : °= 900θ , °= 2701θ ; 3.- Determinación del Punto de intersección de las asíntotas con el eje real.
mn
cerospolos
−−
= ∑ ∑σ ;
24)15()6662(
−+−−++
=ii
σ ; (2.3)
El punto de intersección de las asíntotas y el eje real se produce en : 1=σ ;
4.- Determinación del puntos de quiebre de las ramas. Nótese que en este ejemplo no se tiene la unión de dos ramas (polos).
0)()()(
=== sPds
sdGds
sdf ; (2.4)

Sistemas de Control Lugar de Raíces
Por: Raúl R. Roque Yujra 24
01152384116262)( 345 =−−++= sssssP ; (2.5) cuyas raíces son:
012.21 =s ;
is 101.227.53,2 ±−= ;
is 971.123.25,4 ±−= ; ninguno de estas soluciones pertenece al Lugar de Raíces, entonces quiere decir que no hay puntos de quiebre. 5.- Determinación de los ángulos con que el lugar de raíces deja a los polos:
∑∑ ∠+∠−+°= cerospolosotroskk )12(180ω ;
°=°+°+°+°+°−°= 110)7232()905727(1801ω ; (2.6) como los polos son conjugados:
°−=°=°−°−+°−°−°−−= 110250)7232()905727(1802ω . (2.7) La mediciones se muestran en la figura siguiente.
Im
Re
6
-6
-1-2-5-6
27 32 57 72
Fig. 11 Medición de ángulos
6.- El valor de K se halla reemplazando el polo deseado (este polo debe estar en el LGR), y cumple con:
1.6456
)128)(36(
)(1
824.9571.0
2
22
=++
+++==
+−= isss
sss
sGK . (2.8)

Sistemas de Control Lugar de Raíces
Por: Raúl R. Roque Yujra 25
Im
Re
6
-6
-1-2-5-6
Fig. 12 Lugar geométrico de la Raíces
El sistema de Lazo cerrado es ahora es:
+
-)(sG1.64
R(s) C(s)
Fig. 13 Sistema de Lazo cerrado
el comportamiento en el tiempo se muestra en la figura 10.

Sistemas de Control Lugar de Raíces
Por: Raúl R. Roque Yujra 26
T ime (sec . )
Am
pli
tud
eS t e p R e s p o n s e
0 2 4 6 8 1 00
0.2
0 .4
0 .6
0 .8
1
1.2
1 .4
F r o m : U ( 1 )T
o: Y
(1)
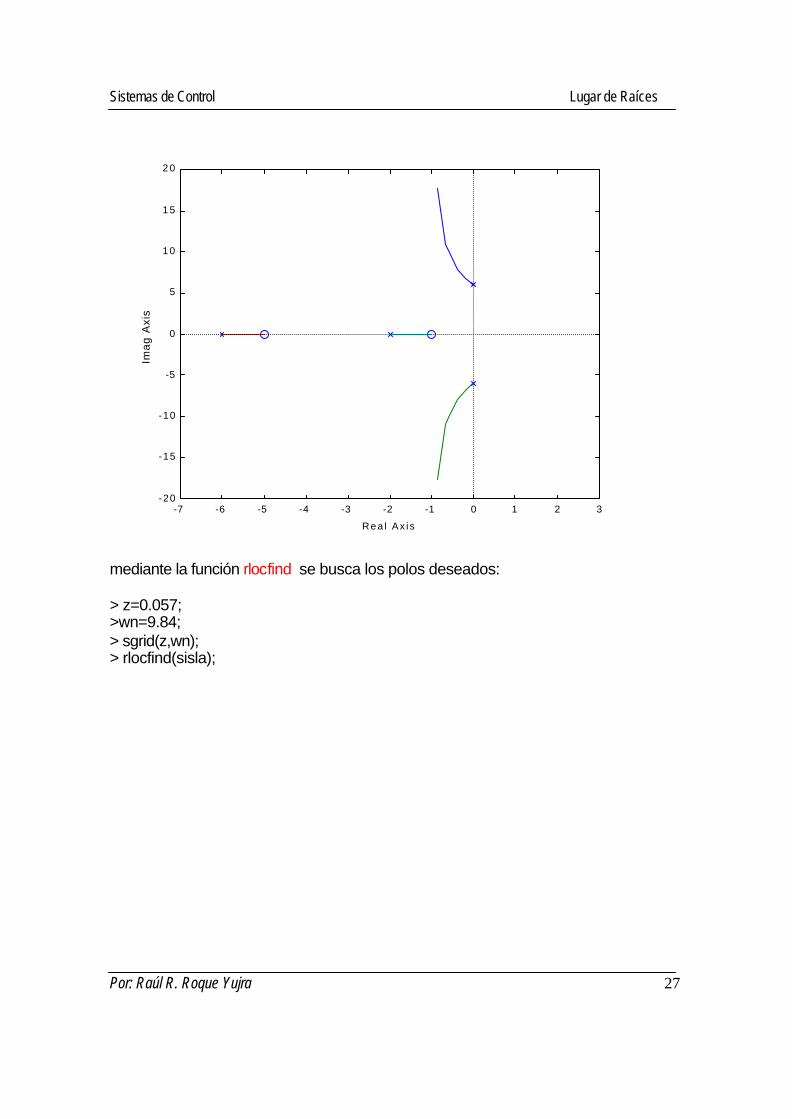
Es importante aclarar que el sistema en lazo abierto era oscilatorio, en cambio con el uso de método del Lugar Geométrico de las raíces se ha encontrado una ganancia la misma que hace que el sistema de lazo cerrado tenga mayor desempeño, aunque con un sobre paso bastante grande. El diseño anterior puede ser resuelto utilizando algunas herramientas computacionales. Ahora se presenta el desarrollo del diseño utilizando rutinas de MATLAB. El Lugar Geométrico de Raíces es trazado mediante la función rlocus, , se utiliza el siguiente script para generar tal grafica: > num=[1 6 5]; > den=[1 8 48 288 432]; > sisla=tf(num,den); > rlocus(sisla); Generando :
Sistemas de Control Lugar de Raíces
Por: Raúl R. Roque Yujra 27
-7 -6 -5 -4 -3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
1 0
1 5
2 0
Rea l Ax i s
Ima
g A
xis
mediante la función rlocfind se busca los polos deseados: > z=0.057; >wn=9.84; > sgrid(z,wn); > rlocfind(sisla);

Sistemas de Control Diseño de Controladores por Resp. en Frecuencia
Por: Raúl R. Roque Yujra 28
-7 -6 -5 -4 -3 -2 -1 0 1 2 3-40
-30
-20
-10
0
1 0
2 0
3 0
4 0
Rea l Ax i s
Ima
g A
xis
esta función determina la ganancia K para obtener los polos deseados, el resultado fue el siguiente: » rlocfind(sisla) Select a point in the graphics window selected_point = -0.59447004608295 + 9.59064327485381i ans = 59.81092426934112.
Problema 15.- Sea un proceso físico, el mismo que puede ser modelado mediante, la siguiente función de transferencia:
)2)(1(06.1
)(++
=sss
sG ;
A este proceso se le aplica realimentación unitaria, tal como se ve en la figura:
)2)(1(06.1
++ sss+-
)(sR )(sC

Sistemas de Control Diseño de Controladores por Resp. en Frecuencia
Por: Raúl R. Roque Yujra 29
Fig. 14 Proceso con realimentación unitaria.
a) Determine la función de transferencia del sistema de lazo cerrado. b) Determine los polos dominantes del sistema. c) Determine la constante de error de velocidad. d) Determine el Lugar Geométrico de las Raíces. e) Hallar el intervalo de la constante K de manera que el sistema sea estable. f) Diseñar un compensador de retraso para que el error estático de velocidad
incremete hasta casi 5 [1/seg] , sin que los polos del sistema de lazo cerrado con 1=K , no cambien en forma notable.
Solución.- a). La función de transferencia para un sistema con realimentación unitaria es:
)2)(1(06.1
1
)2)(1(06.1
)()(
+++
++=
sss
ssssRsC ;
simplificando:
06.1)2)(1(06.1
)()(
+++=
ssssRsC ;
b). Los polos dominantes se determinan encontrando las raíces del numerador, esto es:
006.1)2)(1( =+++ sss ; entonces:
js 58.033.02,1 ±−= y 33.23 −=s ; los polos dominantes son:
js 58.033.02,1 ±−= ;
de aquí se puede obtener el coeficiente de amortiguamiento y la frecuencia natural no amortiguada de la siguiente manera: Sabemos que:
nζω=33.0 y 2158.0 ζω −= n ; resolviendo ambas ecuaciones, se tiene que, el coeficiente de amortiguamiento es:
5.0=ζ ; y la frecuencia natural no amortiguada es:
66.0=nω ; La respuesta al escalón unitario del sistema de lazo cerrado se obtiene mediante el siguiente script en MATLAB:
num=[1.06];
Sistemas de Control Diseño de Controladores por Resp. en Frecuencia
Por: Raúl R. Roque Yujra 30
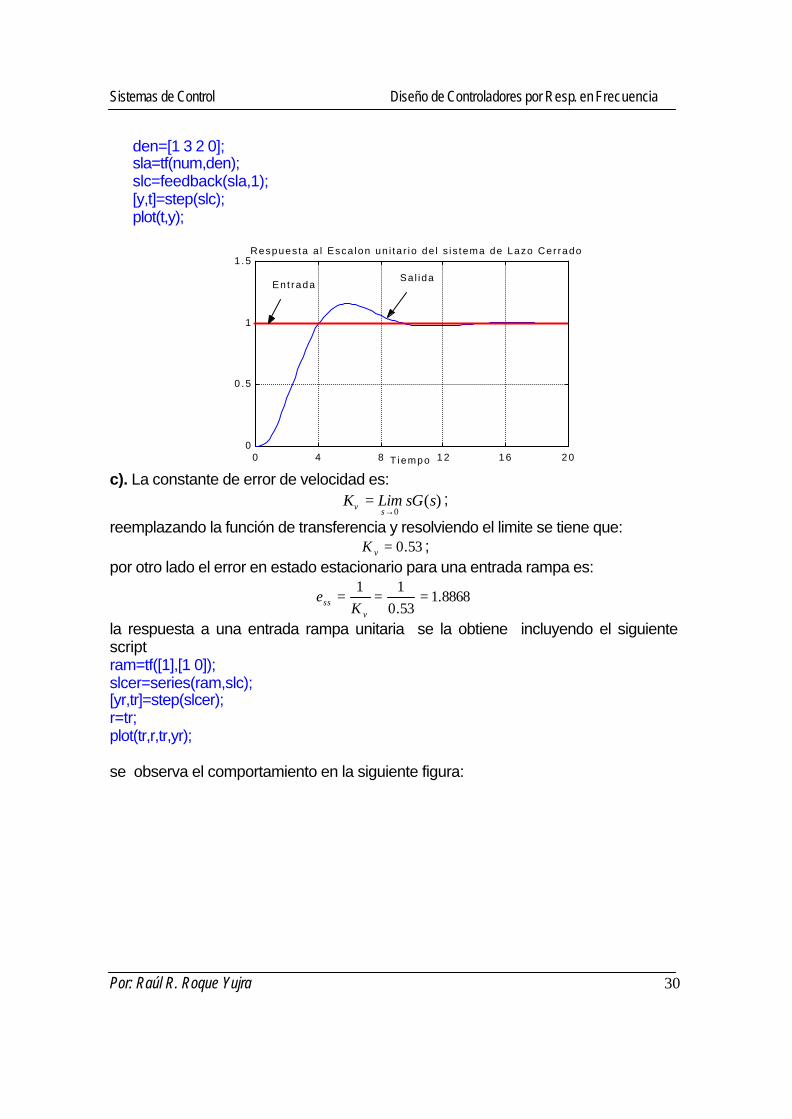
den=[1 3 2 0]; sla=tf(num,den); slc=feedback(sla,1); [y,t]=step(slc);
plot(t,y);
0 4 8 1 2 1 6 2 00
0 .5
1
1 .5Respues ta a l Esca lon un i ta r io de l s i s tema de Lazo Cer rado
T iempo
Sal ida En t rada
c). La constante de error de velocidad es:
)(0
ssGLimKsv →
= ;
reemplazando la función de transferencia y resolviendo el limite se tiene que: 53.0=vK ;
por otro lado el error en estado estacionario para una entrada rampa es:
8868.153.011
===v
ss Ke
la respuesta a una entrada rampa unitaria se la obtiene incluyendo el siguiente script ram=tf([1],[1 0]); slcer=series(ram,slc); [yr,tr]=step(slcer); r=tr; plot(tr,r,tr,yr); se observa el comportamiento en la siguiente figura:

Sistemas de Control Diseño de Controladores por Resp. en Frecuencia
Por: Raúl R. Roque Yujra 31
0 2 4 6 8 1 0 1 20
2
4
6
8
1 0
1 2Respues ta a una Rampa un i ta r iaRespues ta a una Rampa un i ta r ia
T iempo
Ent rada
Sa l ida
Se nota que el error en estado estacionario es bastante grande. d). Para hallar el Lugar Geométrico de las Raíces se utiliza el siguiente script en MATLAB: num=[1.06]; den=[1 3 2 0]; sla=tf(num,den); rlocus(sla);
-2 .5 -2 -1 .5 -1 -0 .5 0 0 .5
-2
-1
0
1
2
Real Axis
Ima
g A
xis
Lugar Geomét r i co de las Raíces para e l s i s tema:Lugar Geomét r i co de las Raíces para e l s i s tema:
G(s )= 1 .06 / s ( s+1 ) (s+2 )
e). Para hallar el intervalo en el cual la ganancia K hace que el sistema sea estable, se utiliza el criterio de Rout-Hurwitz, entonces se analiza la ecuación caracteristica:
0)(1 =+ sKG ;
reemplazando:
Sistemas de Control Diseño de Controladores por Resp. en Frecuencia
Por: Raúl R. Roque Yujra 32
0)2)(1(
06.11 =
+++
sssK ;
operando se tiene: 0)1(06.123 23 =++++ Ksss ;
entonces:
[ ] 0
)1(06.1
2
)1(06.1
)1(06.1631
3
1
0
1
2
3
+
+
+−K
K
K
s
s
s
s
para que el sistema sea estable, los elementos de la primera columna deben ser positivos, de esta manera se obtienen las siguientes condiciones:
i). [ ] 0)1(06.1631
>+− k ;
ii). 0)1(06.1 >+K ; el intervalo resultante es:
06604.4 >> K ; En el inciso d). se determinó que el error en estado estacionario era grande, si desearíamos incluir la ganancia K , dentro la trayectoria directa modificará el error en estado estacionario reduciendolo, sin embargo como se ve el valor de la ganancia K esta restringido en un pequeño intervalo, tal como se determino anteriormente. f). El compensador de retraso tiene la forma:
Ts
Ts
KTs
TsKsG ccc
ββ
β1
1
11
)(+
+=
++= ;
La localización del cero y el polo de este compensador deben estar alejados del los polos dominantes deseado. La contribución angular de este compensador debe ser bastante pequeña (menor que 7° [Ogata, 2da Edición]). Existe criterios de diseño que indican que el valor del parámetro β debe ser 151 << β . Con lo dicho anteriormente, la posición del cero será:
08.01
=T
;
se elige 10=β ; entonces el compensador tiene la forma:
008.008.0
)(++
=ss
KsG cc ;
lo que queda determinar es la ganancia; antes de ello veamos la contribución angular que da el compensador en la ubicación de los polos dominantes, es decir:

Sistemas de Control Diseño de Controladores por Resp. en Frecuencia
Por: Raúl R. Roque Yujra 33
008.008.0|)( 58.033.0 +∠−+∠=∠ +−= sssG jsc ;
°=∠ +−= 72.5|)( 58.033.0 jsc sG ; Esta contribución angular modifica el Lugar de Raíces, claro está que dicha modificación es pequeña tal como se quería. Ahora la función de transferencia de trayectoria directa, incluido el compensador es:
)2)(1(06.1
*008.008.0
)()(+++
+=ssss
sKsGsG cc ;
lo que es igual :
)2)(1)(008.0(08.0
)()(+++
+=ssss
sKsGsGc ;
donde cKK 06.1= ; ahora el Lugar Geométrico de la Raíces que da como:
-1 .5 -1 -0 .5 0 0 .5 1
-0 .5
0
0 .5
1
1 .5
2
2 .5
Real Axis
Ima
g A
xis
Lugar Geomét r i co de las Ra íces pa ra e l s i s tema compensado :
S in Compensado r
Con Compensado r po los dominantes
s in compensado r
po los dominantes
con compensado r
0 .58
0.5
-0.28
entonces los nuevos polos dominantes son:
js 5.028.02,1 +−= ;
ahora se debe hacer cumplir el criterio del modulo, sobre los nuevos polos dominantes:
1)2)(1)(008.0(
08.0 =+++
+ssss
sK ;
es decir que:
9510.008.0
)2)(1)(008.0(
5.028.0
=+
+++=+−= jss
ssssK ;
Sistemas de Control Diseño de Controladores por Resp. en Frecuencia
Por: Raúl R. Roque Yujra 34
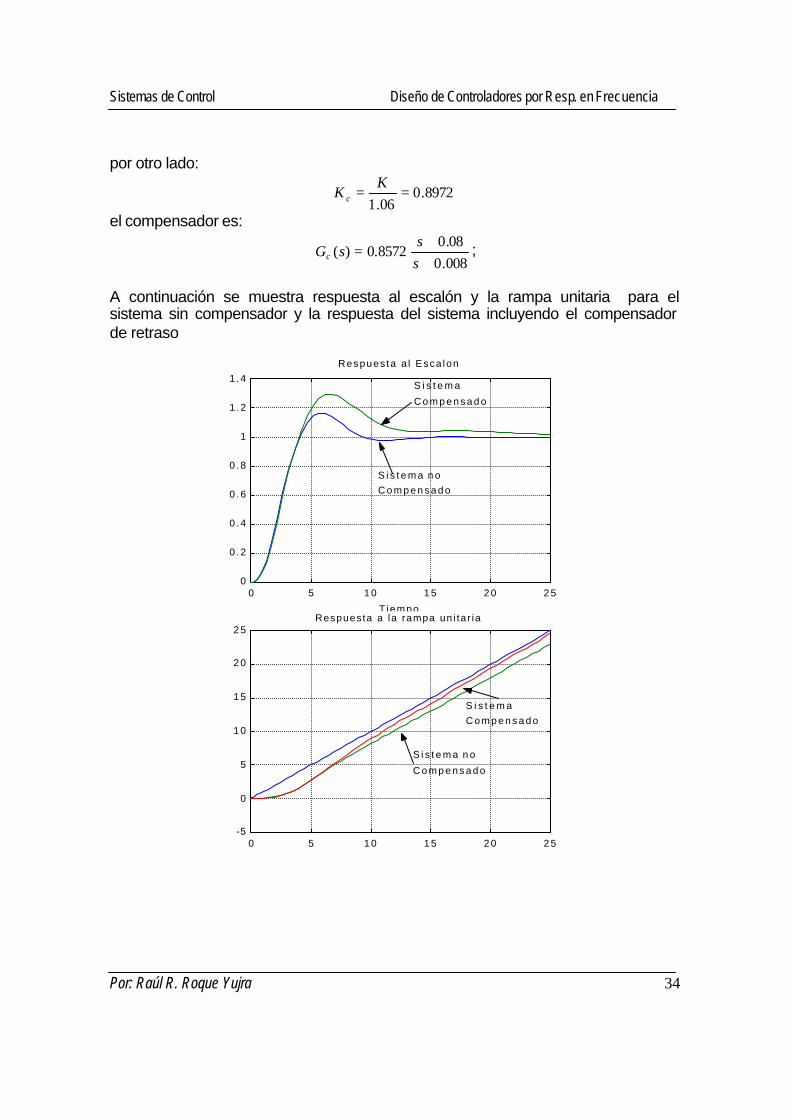
por otro lado:
8972.006.1
==K
K c
el compensador es:
008.008.0
8572.0)(++
=ss
sGc ;
A continuación se muestra respuesta al escalón y la rampa unitaria para el sistema sin compensador y la respuesta del sistema incluyendo el compensador de retraso
0 5 1 0 1 5 2 0 2 50
0 .2
0 .4
0 .6
0 .8
1
1 .2
1 .4
T iempoT iempo
Respues ta a l Esca lonRespues ta a l Esca lon
S i s t e m a
C o m p e n s a d o
S i s t e m a n o
C o m p e n s a d o
0 5 1 0 1 5 2 0 2 5-5
0
5
1 0
1 5
2 0
2 5Respuesta a la rampa un i tar ia
S i s t e m a
C o m p e n s a d o
S i s t e m a n o
C o m p e n s a d o

Sistemas de Control Diseño de Controladores por Realimentación de Estados
Por: Raúl R. Roque Yujra 35
Problema 16 Sea el sistema de orientación de satélite de la figura, donde θ es la posición angular deseada, l es la distancia del eje del propulsor al centro de masa del satélite, β es el ángulo de efecto de control, la variación del ángulo β es proporcional a la señal de control u , R es una constante que representa una cierta ganancia estática del actuador que convierte el control u en velocidad de variación del ángulo β y J es la inercia efectiva del satélite.
l
β
θ
CM
Orientaciónde
ReferenciaOrientaciónDeseada
F
Sistema de orientación de Satélite
Las ecuaciones diferenciales que rigen el movimiento del sistema se obtienen de la segunda ley de Newton:
lFaplicadonetoTorqueJ *)sin(brazo x Fuerza βθ ===&& ; o en forma compacta:
)sin( βθ FlJ =&& ; el ángulo β crece o decrece, de acuerdo al control aplicado mediante la ley de variación:
Rudtd
=β ;
las variables d estado se escogen como: θ=1x ; θ&=2x y β=3x ;
Entonces el sistema no lineal se describe de la siguiente manera en el espacio de estados:
),...,,(),...,,( 2121 iiii xxxugxxxfx +=& ; ni ,...2,1= es decir:
21 xx =& ;
)sin( 32 xJFl
x =& ;
Rux =3& ; El punto de equilibrio físicamente signi ficativo del sistema, se obtiene igualando a cero el miembro derecho de cada ecuación de estado. Este resulta ser:
arbitrariox =1 ; 02 =x ; 03 =x y 0=u

Sistemas de Control Diseño de Controladores por Realimentación de Estados
Por: Raúl R. Roque Yujra 36
La respuesta a un escalón unitario del sistema no lineal es:
0 1 2 3 4 5 6 7 8 9 1 00
5 0
1 0 0
1 5 0
0 1 2 3 4 5 6 7 8 9 1 00
5
1 0
1 5
0 1 2 3 4 5 6 7 8 9 1 00
1
2
Respues ta de l s i s tema No l inea l
x 1
x 2
x 3
Linealización del sistema
Se tiene que la forma lineal general es: BuAxx +=& ;
donde:
ei xxJA == | ; para linealizar el sistema alrededor de estos puntos se determina la matriz Jacobiana del sistema, es decir:
=
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
==
000
00
010
000
)cos(00
010
3
3
3
2
3
1
3
3
2
2
2
1
2
3
1
2
1
1
1
JFl
xJFl
xf
xf
xf
xf
xf
xf
xf
xf
xf
JA A ;

Sistemas de Control Diseño de Controladores por Realimentación de Estados
Por: Raúl R. Roque Yujra 37
=
∂∂∂∂∂∂
==
R
ugugug
JB B 0
0
1
3
1
2
1
1
;
[ ]001=C ; la representación lineal en el espacio de estados es:
u
Rx
x
x
JFl
x
x
x
+
=
0
0
000
00
010
3
2
1
3
2
1
&
&
&
;
[ ]
=
3
2
1
001
x
xx
y ;
Descripción de las características del Modelo Lineal
El sistema linealizado es independiente del punto de equilibrio. También es fácil ver que el sistema es completamente controlable pues la matriz de controlabilidad dada por:
=
00
00
00
RJ
FLRJ
FLR
C ;
es de rango completo (rango 3), pues su determinante es distinta de cero.
Simulación del Sistema en Lazo Abierto
Para realizar la simulación del sistema en lazo abierto se toman los siguientes valores de las constantes:
200=F ; 3=L ; 20=R ; 50=J ; Los resultados son los siguientes

Sistemas de Control Diseño de Controladores por Realimentación de Estados
Por: Raúl R. Roque Yujra 38
0 1 2 3 4 5 6 7 8 9 1 00
1 0 0
2 0 0
0 1 2 3 4 5 6 7 8 9 1 00
2
4
6x 10
4
0 1 2 3 4 5 6 7 8 9 1 00
5000
10000
15000
Respues ta de l s i s tema No l inea l
x 1
x 2
x 3
Diseño de un Controlador El controlador que se va diseñar tiene el enfoque del espacio de estados, es decir que se usara los estados para realizar una compensación, este método se denomina Control por Realimentación de Estados. Proponemos entonces la siguiente ley de control:
332211 xkxkxku −−−= ; Esta ley de control conlleva, en consecuencia, la siguiente expresión para el sistema de control en lazo cerrado.
−−−
=
3
2
1
3213
2
1
00
010
x
x
x
RkRkRkJ
FL
x
x
x
&
&
&
;
Puesto que el interés fundamental está en inducir una dinámica controlada para el valor de las perturbaciones del estado de naturaleza asintóticamente estable a cero, los valores de las ganancia 1k , 2k y 3k deben especificarse de tal manera que los autovalores del sistema autónomo anterior(sistema de lazo cerrado) tengan parte real negativa. Con el objetivo de hacer está especificación calculamos el polinomio característico y lo igualamos a alguno del cual sabemos tiene sus raíces en el semiplano izquierdo en valores preestablecidos. El polinomio característico del sistema de lazo cerrado está dado por:

Sistemas de Control Diseño de Controladores por Realimentación de Estados
Por: Raúl R. Roque Yujra 39
JFLRk
sJ
FLRksRks
RksRkRkJ
FLs
s
bkAsI 1223
3
321
0
01
det)det( +++=
+
−
−
=+−
como puede apreciarse de la conformación de este polinomio característico, los parámetros de diseño intervienen independientemente en cada término del polinomio. Este hecho permitirá obtener estos valores al igualar el polinomio característico a uno deseada cuyos polos se encuentran en el semiplano izquierdo. Supongamos que deseamos contar con una localización de polos como la que se muestra en la figura:
cj
-cj
ab
Es decir , deseamos que el polinomio característico en lazo cerrado por:
)2)(())()(()( 222 cbbssasjcbsjcbsassp d ++++=++−++= ; donde a, b y c, son conocidos y se escogen de tal manera que el sistema de lazo cerrado tenga características deseables. Igualando, los coeficientes de las mismas potencias de ambos polinomios obtenemos el siguiente conjunto de ecuaciones para los parámetros de diseño:
FLRcba
Jk)( 22
1+= ;
FLRabcb
Jk222
2
++= ;
Rab
k+
=2
3 ;
Simulación en Lazo cerrado Para realizar la verificación del diseño del controlador, se utilizaron los siguientes datos en le controlador:
2=a ; 5.3=b ; 75.12=c ; las condiciones iniciales del sistema son:
21 =x ; 01 =x ; 03 =x ;
Sistemas de Control Diseño de Controladores por Realimentación de Estados
Por: Raúl R. Roque Yujra 40
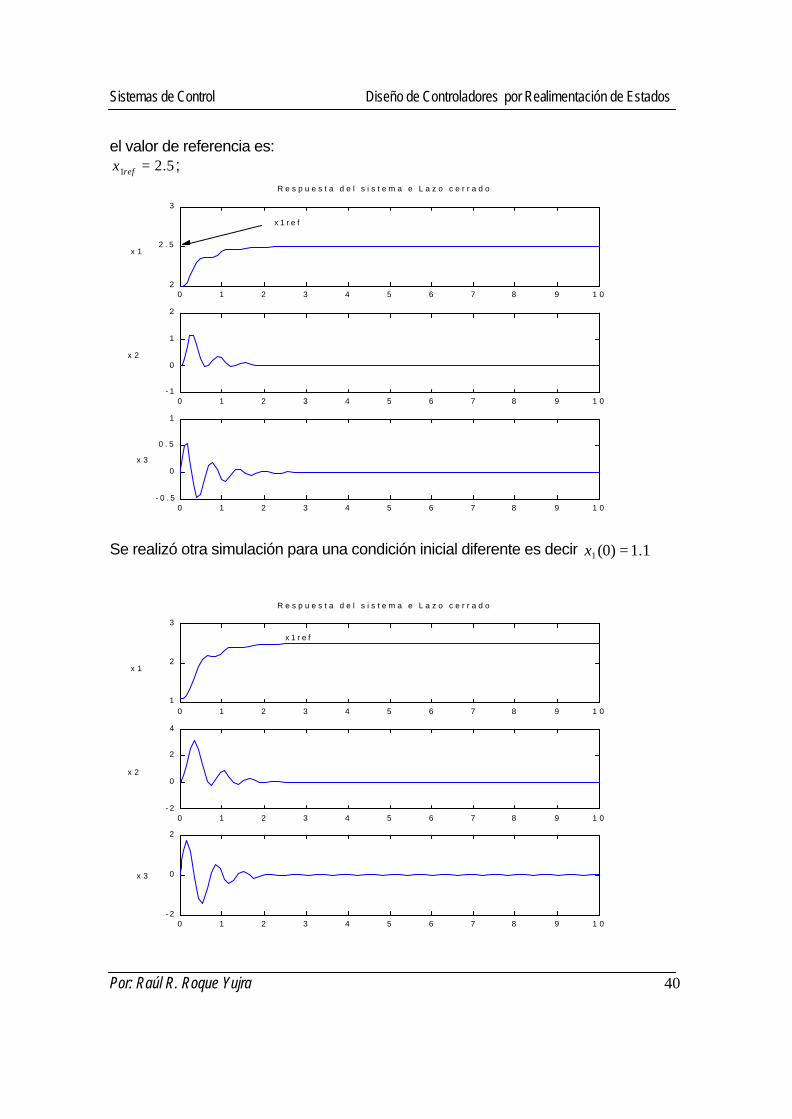
el valor de referencia es: 5.21 =refx ;
0 1 2 3 4 5 6 7 8 9 1 0- 0 . 5
0
0 . 5
1
0 1 2 3 4 5 6 7 8 9 1 02
2 . 5
3
0 1 2 3 4 5 6 7 8 9 1 0- 1
0
1
2
R e s p u e s t a d e l s i s t e m a e L a z o c e r r a d o
x 1
x 2
x 3
x 1 r e f
Se realizó otra simulación para una condición inicial diferente es decir 1.1)0(1 =x
0 1 2 3 4 5 6 7 8 9 1 0- 2
0
2
0 1 2 3 4 5 6 7 8 9 1 0
1
2
3
0 1 2 3 4 5 6 7 8 9 1 0- 2
0
2
4
R e s p u e s t a d e l s i s t e m a e L a z o c e r r a d o
x 1
x 2
x 3
x 1 r e f
Sistemas de Control Diseño de Controladores por Realimentación de Estados
Por: Raúl R. Roque Yujra 41
es claro notar que cuando la condición inicial del sistema está proxima a la referencia, el controlador realiza optimamente su trabajo.
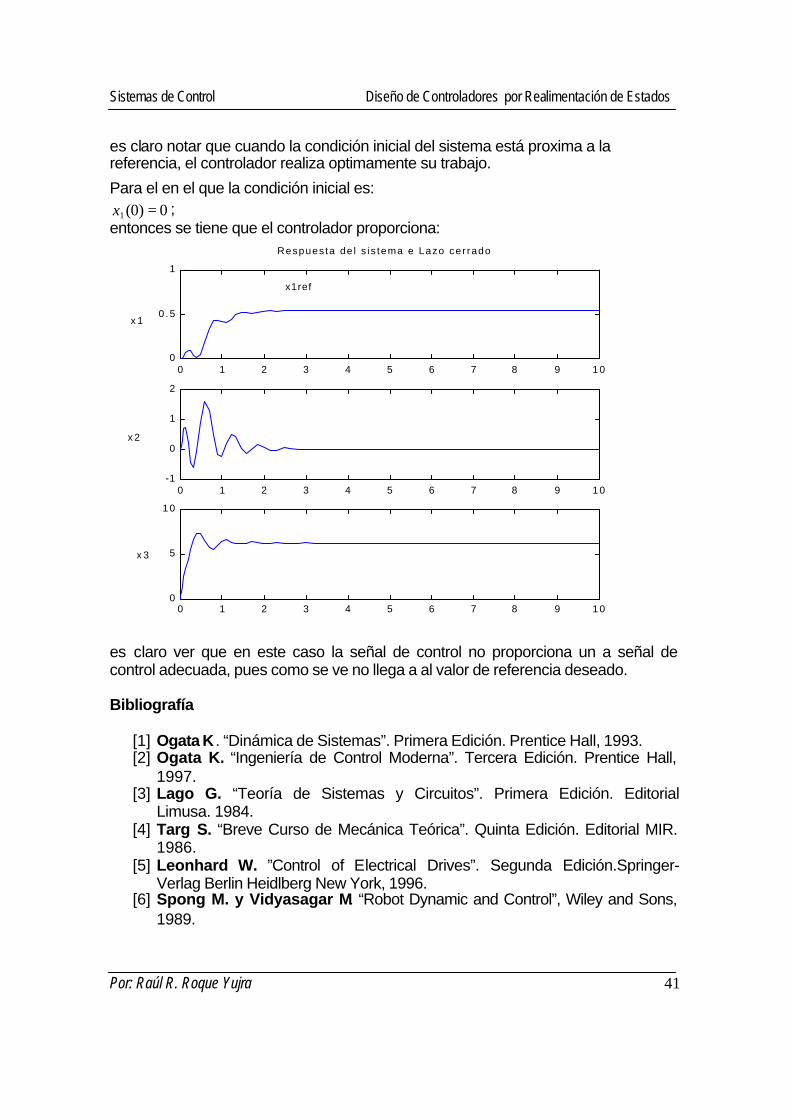
Para el en el que la condición inicial es: 0)0(1 =x ;
entonces se tiene que el controlador proporciona:
0 1 2 3 4 5 6 7 8 9 1 00
5
1 0
0 1 2 3 4 5 6 7 8 9 1 00
0 .5
1
0 1 2 3 4 5 6 7 8 9 1 0-1
0
1
2
Respues ta de l s i s tema e Lazo cer rado
x 1
x 2
x 3
x1ref
es claro ver que en este caso la señal de control no proporciona un a señal de control adecuada, pues como se ve no llega a al valor de referencia deseado. Bibliografía
[1] Ogata K . “Dinámica de Sistemas”. Primera Edición. Prentice Hall, 1993. [2] Ogata K. “Ingeniería de Control Moderna”. Tercera Edición. Prentice Hall,
1997. [3] Lago G. “Teoría de Sistemas y Circuitos”. Primera Edición. Editorial
Limusa. 1984. [4] Targ S. “Breve Curso de Mecánica Teórica”. Quinta Edición. Editorial MIR.
1986. [5] Leonhard W. ”Control of Electrical Drives”. Segunda Edición.Springer-
Verlag Berlin Heidlberg New York, 1996. [6] Spong M. y Vidyasagar M. “Robot Dynamic and Control”, Wiley and Sons,
1989.





























