Embed Size (px)
Citation preview

Soil Dynamics and Earthquake Engineering 46 (2013) 1–12
Contents lists available at SciVerse ScienceDirect
Soil Dynamics and Earthquake Engineering
0267-72
http://d
n Corr
E-m
Zhirong
journal homepage: www.elsevier.com/locate/soildyn
Analysis of wave propagation in a plate resting on a Winkler foundationwith a sample application to vibration control
Zhirong Lin n, Akira Kasai
Department of Civil Engineering, Nagoya University, Nagoya 4648603, Japan
a r t i c l e i n f o
Article history:
Received 6 August 2009
Received in revised form
8 February 2011
Accepted 2 December 2012Available online 2 January 2013
61/$ - see front matter & 2012 Elsevier Ltd. A
x.doi.org/10.1016/j.soildyn.2012.12.001
esponding author.
ail addresses: [email protected],
[email protected] (Z. Lin).
a b s t r a c t
A variational statement in the field of complex numbers and its semi-analytical solution are presented
to study the wave propagation in plates resting on a Winkler foundation. The method and its computer
program are verified by comparison with the available results for a freely supported plate and
performing a time domain analysis for a plate-Winkler foundation system. A variety of wave
propagation phenomena is observed, and useful information can be extracted from the results. The
foundation is found to act as a low frequency band-stop filter for flexural modes, and a stiffer
foundation leads to wider widths of these stop bands. As a sample application, a barrier design for
controlling flexural motions in the system is proposed. The effectiveness of the design is also
demonstrated.
& 2012 Elsevier Ltd. All rights reserved.
1. Introduction
There are many soil models in the field of civil engineering, butthe one used most frequently in soil–structure interaction ana-lyses is the Winkler theory of equivalent springs because of itsapparent simplicity and ability to describe many engineeringproblems and to ‘‘incorporate different nonlinear aspects of thebehavior at a reduced computational effort compared to otherapproaches’’ [1]. The ground support of a plate in a workingenvironment is usually modeled as equivalent springs accordingto the Winkler theory, as in the cases of ground floors of buildings,runways of airports and roadways. These plate- or beam-Winklerfoundation systems have attracted much attention from manyresearchers for many years (e.g., [2–5]). However, none of thesestudies has revealed the problem of wave propagation, and theyrely on plates of finite length. Furthermore, most of them havebeen done within the scope of classical or high-order sheardeformation beam or plate theory.
Vibration is a major environmental concern through the world,and it is commonly described in terms of modes or wave motions.For a structure that behaves as if it has infinite length, using awave model is more appropriate [6] because the modes ofvibration are standing waves by nature and result from theinterference of the traveling waves. In earthquake engineering,Rayleigh type waves propagating in the region near the soilsurface transfer most of the vibration energy that may cause strong
ll rights reserved.
ground motions and stress levels that transmit the vibrationsthrough the subsoil to the structures [7]. The plates on foundationsare distinguished from the foundations by their waveguide geo-metry and, often, impedance differences. Mechanical vibrations inthese plates, generated by seismic excitation, machine, traffic, etc.,can be transmitted over long distances using a series of reflectionsbetween the cross section boundaries to the advantage of theirpropagation, which can cause distress to adjacent machines andstructures and annoyance to people. Understanding the wavepropagation information is important in studying near-field orhigh-frequency motions and developing an effective method ofnon-destructive evaluation, noise or vibration control, interpreta-tion of earthquake records, etc. [8–17].
In this paper, a variational statement in the field of complexnumbers is presented to study the problem of wave propagationin plates resting on a Winkler foundation. A semi-analyticaltechnique is used to construct the variational trial function forthe variational statement. The semi-analytical technique is basedon the factorization of the function describing the displacementfield of complex numbers. The cross section is modeled in amanner analogous to the conventional finite element method,while the displacement along the wave propagation direction isexpressed analytically in the form of a harmonic complex expo-nential function. Available work relevant to a similar techniqueincludes [18–20], in which other wave propagation problems arestudied; [21,22], in which the buried structures subjected tothree-dimensional surface loading are analyzed both staticallyand dynamically; and [23–25], in which the authors present thetechnique for the analysis of piezoelectric structures undermechanical and electrical loads.

Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–122
The outline of this paper is as follows. Sections 2 and 3 develop thegeneral variational statement in the field of complex numbers and itssemi-analytical solution. The results are presented in Section 4,including a detailed description of the typical results, a study of thefoundation effects and two verification processes. A barrier design forvibration control is proposed as an application example in Section 5,and the summary and conclusions are given in Section 6. Finally, theappendix summarizes an analytical procedure for a classical plateresting on a Winkler foundation, and it may be useful for readers tonote that the understanding of the analysis and results presented inthis paper may be simplified by going through the appendix first.
Fig. 1. Schematic of a plate-Winkler foundation system.
2. Variational statement in the field of complex numbers forwave propagation analysis
Consider the spatial configuration of a general deformable bodydefined by domain O�R3, which is described by Cartesian coordi-nates (x,y,z):¼x with Dirichlet boundary conditions on a givendisplacement area @Ou and hybrid boundary conditions on theWinkler ground supported area @Os. Let nf be the unit normal vectorto @Os and u,C,r and e be the displacement vectors, fourth-orderelastic, second-order stress and strain tensors, respectively, with theirmatrix forms:
½u� ¼ ux uy uz
h iT, ½e� ¼ exx eyy ezz 2eyz 2ezx 2exy
h iT
½r� ¼ sxx syy szz syz szx sxy
h iT, ½nf � ¼ nx ny nz
h iT ,
ð1Þ
for which the following relationships hold:
e½ � ¼r u½ �, r¼
@@x 0 0 0 @
@z@@y
0 @@y 0 @
@z 0 @@x
0 0 @@z
@@y
@@x 0
2664
3775
T
, r½ � ¼ C½ � e½ � ð2Þ
For harmonic waves with frequency o, the common complexformalism should be adopted [26], and the displacement, strain,and stress are written as
½r,e,u� ¼R½r,e,u� x,oð Þ exp �iotð Þ ð3Þ
where i¼ffiffiffiffiffiffiffi�1p
and u,e,r are the amplitudes. Thus, the kineticenergy of the structure O is
T ¼1
2
ZZZOro2½un
�T ½u� dO ð4Þ
where (n) denotes the complex conjugate and r is the density. Inthe absence of body forces and external loads, the potentialenergy of the structure O is
Vs ¼1
2
ZZZOr½un�
� �T½C�r½u� dO ð5Þ
and the potential energy of the Winkler foundation is
Vw ¼1
2
ZZ@Os
kf ½un�T ½nf �½nf �
T ½u� dS ð6Þ
where kf is the Winkler spring stiffness. Because Hamilton’sprinciple is in the form
dZ
tT�Vð Þ dt¼ 0 ð7Þ
and T, Vw and Vs are independent of time t here, the variationalstatement is
dI uð Þ ¼
ZZZO� rd½un
�� �T
½C�r½u� dOþZZZ
Oro2d½un
�T ½u� dO
þ
ZZ@Os�kfd½u
n�T ½nf �½nf �
T ½u� dSþc:c:¼ 0 ð8Þ
where c.c. denotes the complex conjugate of the quantities thatprecede it. Eq. (8) is similar to the equations derived for harmonicmotions in periodic structures in [26].
Let us consider a plate structure O resting on the Winklerfoundation and the harmonic waves propagating along the z-axisas shown in Fig. 1. For the Cartesian coordinates used to describethe system, the waves in the system are of the following planewave form:
½u x,oð Þ� ¼ ½ ~u x,y,o,kzð Þ� exp ikzzð Þ ð9Þ
where ~u is the amplitude and kz is the wave number thatdescribes the dispersive properties of the system and is definedin terms of the phase velocity cp(o) and attenuation coefficienta(o) [27]
kz ¼ iaðoÞþo=cpðoÞ ð10Þ
The wave number can be purely real, purely imaginary orcomplex, associated with a propagating, an evanescent or adecaying oscillating wave, respectively. If Rkz(o) is expanded ina Taylor series, the first-order expansion coefficient defines thegroup velocity [27]
1
cgðoÞ�
d
doo
cpðoÞ¼
1
cpðoÞ1�
ocpðoÞ
dcpðoÞdo
� �ð11Þ
It follows that
cgðoÞ ¼ do kzð Þ=dkz ð12Þ
Under normal dispersion conditions, which are in contrast tothe abnormal conditions when the group velocity exceeds thephase velocity or becomes less than zero, the group velocity is thevelocity of the wave package or the velocity at which energy isconveyed along the wave.
Substituting Eq. (9) into Eq. (8) and using the obvious factsthat exp ikzzð ÞÞ
n exp ikzzð Þ ¼ 1�
and the equation holds for thearbitrary z interval gives the following integration domainreduced equation:
dI uð Þ ¼
ZZSxy
� rSd½ ~un��ikzrzd½ ~u
n�
� �T½C� rS½ ~u�þ ikzrzd½ ~u�ð Þ
þro2d½ ~un�T ½ ~u�dSxyþ
ZLf xy
�kfd½ ~un�T ½nf �½nf �
T ½ ~u�dLf xyþc:c:
¼ 0 ð13Þ
where Sxy is the cross section area of the plate, Lfxy is thecorresponding Winkler ground edge of Sxy as shown in Fig. 1, and
rz ¼
0 0 0 0 1 0
0 0 0 1 0 0
0 0 1 0 0 0
264
375
T
rS ¼
@@x 0 0 0 0 @
@y
0 @@y 0 0 0 @
@x
0 0 0 @@y
@@x 0
2664
3775
T
ð14Þ

Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–12 3
3. Semi-analytical finite element method solution
The plate cross section Sxy and its corresponding Winklerground edge Lfxy can be represented by a system of finite elementswith domains Se and Le, respectively, as shown in Fig. 2, while thewave motion along the z-axis in Eq. (9) remains unchanged sothat z-axis motion can be expressed analytically. In a typicalelement, the displacement field of complex numbers can bewritten in terms of the shape functions, [N]e and the nodalunknown displacements [U]e; thus, the vector ½ ~u x,yð Þ� in Eq. (9)can be written as
½ ~u x,y,o,kzð Þ�e ¼ ½N x,yð Þ�e½U o,kzð Þ�e ð15Þ
where the superscript (e) denotes an element level matrix orvector. The substitution of Eq. (15) into Eq. (13), followed byalgebraic manipulations, yields
dI uð Þ ¼Xne
i ¼ 1
ZZSe�d½U�enT rS½N�
e�ikzrz½N�e
� �T½Ce� rS½N�
e�
þ ikzrz½N�eÞ½U�eþd½U�enTro2½N�eT ½N�e½U�edSe
þXnef
j ¼ 1
ZLe�d½U�enT kf ½N�
eT ½nf �½nf �T ½N�e½U�edLe
þc:c:
¼ 0 ð16Þ
where ne and nef are the total numbers of elements in theircorresponding domains. The number of elements and the order ofthe shape function should be consistent in the shared edge of theWinkler ground and plate cross section.
For the arbitrary variation of the indicated quantities d[U]e*T,this equation yields the following homogenous equation witheach term at its global representation:
Xne
j ¼ 1
½K�e½U�eþXnef
j ¼ 1
½K�ef ½U�e�o2Xne
j ¼ 1
½M�e½U�e ¼ 0
½K�e ¼
ZZSe½B�nT ½Ce
�½B�dxdy ½B� ¼rS½N�eþ ikzrz½N�
e
½K�ef ¼
ZLe
kf ½N�eT ½nf �½nf �
T ½N�edLe½M�e ¼
ZZSer½N�eT ½N�edxdy ð17Þ
By defining the set x,Z� �
AR19½�1,1� for an isoparametricelement and mapping
f 1 : R1-Le
�R2,
f 1 : ðxÞ/ ½NðxÞ�e½X�e,½NðxÞ�e½Y �e� �
ALe
f 2 : R2-Se
�R2,
f 2 : x,Z� �
/ ½N x,Z� �
�e½X�e,½N x,Z� �
�e½Y�e� �
ASeð18Þ
where [X]e,[Y]e are the coordinates of element nodes, [N(x,Z)]e isthe same shape function as in Eq. (15), and [N(x)]e is the onedimensional standard shape function of the same order as
Fig. 2. Schematic of the cross section of the plate-Winkler foundation system and
its finite element discretization used in the semi-analytical analysis.
[N(x,Z)]e, the entries in Eq. (17) can be expressed as
½K�e ¼
Z þ1
�1
Z þ1
�1½B�nT ½Ce
�½B�det½Jf 2x,Z� �
� dxdZ
½M�e ¼
Z þ1
�1
Z þ1
�1r½N�eT ½N�edet½Jf 2
x,Z� �
� dxdZ
½K�ef ¼
Z þ1
�1kf ½N�
eT ½nf �½nf �T ½N�e:Jf 1
ðdxÞ: ð19Þ
where det½Jf ix,Z� �
�, i¼ 1,2 is the determinant of Jacobianmatrix Jf i
x,Z� �
of mapping fi and :�: is the norm of vector �.The normal vector [nf] in Eq. (19) can be obtained by mappingfrom the vector that is made by rotating a unit vector along the xdirection in a parameter element by 901
nf ¼RJf 1ð1Þ
:RJf 1ð1Þ:
, R¼cos903
�sin903
sin903 cos903
� �ð20Þ
The standard finite element assembling procedures can beused here to rearrange Eq. (17) into the following generalizedeigenvalue problem (EVP):
Ax¼ lBx ð21Þ
in which
x¼ [ne
j ¼ 1½U�e, l¼o2, B¼ BT
¼Xne
j ¼ 1
½M�e
A¼ AnT¼Xne
j ¼ 1
½K�eþXnef
j ¼ 1
½K�ef ð22Þ
where x is the global vector of the unknown nodal displacements,B is a real-valued symmetric matrix and A is a Hermitian matrix.In the present case, all eigenvalues are real, and all eigenvectorssatisfy orthogonality conditions [28].
Because only propagating waves are of interest in this paper,the EVP is solved for given values of real valued wave numbersR{kz}. Thus, pairs (R{kz},o,cp,cg) and their eigenvectors give all ofthe propagating wave information in the system. However, thegroup velocity computed from its definition in Eq. (12) requiresdifferentiation of discrete frequencies and wave numbers, and thediscrete differentiation raises numerical challenges to obtain anaccurate group velocity and convert the discrete solutions intodifferent continuous branches of modes. This problem can besolved by following the approach used in [18–19]. First, thederivative of Eq. (21) with respect to the wave number isevaluated
@A
@kz�@l@kz
B
� �xþ A�lBð Þ
@x
@kz¼ 0 ð23Þ
Alternatively, Eq. (21) can also be written in term of the lefteigenvector xL as
xLA¼ lLxLB ð24Þ
and, for a complex Hermitian EVP, the following relations hold:
xL ¼ xn, lL¼ l ð25Þ
Then, multiply Eq. (23) from the left by the left eigenvector xL,the following equation can be obtained:
@l@kz¼ xn @A
@kzx=xnBx ð26Þ
Therefore,
cg ¼@o@kz¼@o@l
@l@kz¼ xn @A
@kzx=2oxnBx ð27Þ

Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–124
In Eqs. (26) and (27),
@A
@kz¼Xne
j ¼ 1
ZZSxy
�irz½N�e
� �T½Ce� rs½N�
eþ ikzrz½N�e
� �
þXne
j ¼ 1
ZZSxy
rs½N�e�ikzrz½N�
e� �T
½Ce� þ irz½N�
e� �
ð28Þ
From Eq. (27), the group velocity can be solved withoutrequiring the discrete differentiation.
In this paper, a Cþþ program based on the framework ofOOFEM Lib [29] was written to form Eq. (21), and ARPACKþþ[30], which is an object-oriented version of the well-knownARPACK [31] package, was used in the program to solve Eq. (21)efficiently. In the program, a second order 8-node 2D element(Fig. 2) for the plate cross section and the corresponding 3-node1D element (Fig. 2) for the Winkler ground edge were developedin 3D space. They are general elements based on the continuousmedium model and can catch all propagating modes in the plate-Winkler foundation system, provided the mesh of the crosssection of the plate and Winkler foundation is sufficiently fine.It is an important part of developing an effective non-destructive
E31
F21F11
E41
X41
X51
E51
F43
F33
F22
F32
E11
λE31=35.9 m
λF22=6.87 m
λF11=4.44 m
32 Hz
E21
E11
Fig. 3. Non-dimensionalized typical results of propagating waves for the plate-Winkler
vs. frequency relationship, and (c) enlarged views of the boxed areas around E11 and
evaluation and noise control method, where high frequencywaves are of concern. When low frequency waves are of concern,the shell or plan strain assumption can be used in the foregoingderivation to reduce the cost of modeling.
4. Results and verifications
For an isotropic plate-Winkler foundation system, the advan-tage of symmetric geometry can be taken to de-couple symmetricmotions from anti-symmetric motions, and only half of the crosssection requires discretization, as shown in Fig. 2. For the sake ofclarity, only symmetric motions are studied in this paper byenforcing Uy¼0 boundary conditions on the symmetry plane. Themesh refinement used in all of the examples is determined simplyby convergence studies for the modes of interest, and the resultsare non-dimensionalized by the following expressions:
k¼ kzH, o¼ oH
cref, cg ¼
cg
cref, cref ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiE
2r 1þm� �
sð29Þ
E11
F11
E21
F21
F22
X41
F33
X51
E51
F32 F43
E31
E41cg=1153 m/s
cg=200.2 m/s
cg=268.7 m/s
32 Hz
E21
F11
F21
foundation system: (a) frequency vs. wave number relationship, (b) group velocity
F21 modes.

Fig. 4. Mode shapes corresponding to a 32 Hz excitation: (a) F11 mode, (b) E31 mode, and (c) F22 mode.
Table 1Differences between the frequency results predicted by classical theory of plates
and present method.
Wave number Frequency differences of flexural modes (Hz)
1st order 2nd order 3rd order
0.0 þ0.001 þ0.33 þ6.47
1.0 þ0.27 þ1.82 þ10.42
2.0 þ3.780 þ7.38 þ21.80
0.0
0.1
0.2
0.3
0.4
0.00 1.00 2.00 3.00 4.00 5.00
Cut
off
fre
quen
cy
Foundation stiffness (N/m3)109
E11 mode
F21 mode
F32 mode
F43 mode
X51 mode32 Hz
Fig. 5. Non-dimensional cutoff frequencies as a function of foundation stiffness.
Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–12 5
A typical result is given first in what follows to describe certaincommon features of propagating waves for all cases studied. Italso provides knowledge for later verification convenience. Next,a series of plate-Winkler systems with various foundation stiff-nesses is considered to access the effect of the foundation. Finally,verification is conducted by two different processes.
4.1. Typical numerical results for the plate-Winkler foundation
system
To show the typical results, a plate-Winkler system with thefollowing geometry and physical property is considered:
B¼ 5 m, H¼ 0:3 m, E¼ 3:1� 1010 N=m2,
r¼ 23,000 N=m3, m¼ 0:25, kf ¼ 1:0� 107 N=m3 ð30Þ
where E and m are Young’s elastic modulus and Poisson’s ratio ofthe isotropic plate, respectively.
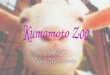
Fig. 3 shows the wave number and group velocity for thelowest-order five positive direction waves. Various branches areclassified according to their mode shapes and continuities. Special
attention is paid around the frequencies where two dispersioncurves approach each other closely. In these locations, waveveering may occur, where the two curves do not cross each otherand the wave numbers change rapidly. The mode shape changesaround the frequency where veering occurs [17]. Each branch orportion of the branch is denoted by a capital letter and twonumbers, which indicate the predominant motion, branch num-ber, and order of the mode shape, respectively. Predominantmotions of flexure, extension, and expansion are denoted by thecapital letters F, E, and X, respectively.
Useful information on the propagating waves in the plate-Winkler system can be readily extracted from Fig. 3. For example,

Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–126
it can be readily known that only three propagating modes, F11,F22 and E31, that propagate with group velocities of 268.7 m/s,200.2 m/s and 1153 m/s, respectively, can be excited by aninput of a 32 Hz (about 200 rad/s) external force to the system,as denoted by double arrow lines in Fig. 3(a) and (b).Their corresponding mode shapes are shown in Fig. 4. The 3Ddisplacement field in Fig. 4 indicates that the E31 mode is theextensional mode characterized by its predominantly extensionalmotion; the F11 and F22 modes are the first and second order
Fig. 6. Comparisons of frequency vs. wave number relationships publishe
flexural modes, respectively, characterized by their predomi-nantly bending motions.
In Fig. 3(b), phenomena of abnormal dispersion can beobserved, for example, in the X51 and F21 modes (also seeFig. 3(c)). Wave veering is also observable, for example, inFig. 3(a) and (b) between dispersion curves of branches 4 and5 around where the changes of mode shape can be seen: the E41mode stops to propagate around frequency 0.27 Hz and is con-verted to an expansion mode X41. Almost at the same location, a
d in [20] for a freely supported thick plate. n [20]—present solution.

Fig. 7. Schematic of the Abaqus/Explicit analysis model for the time domain
verification purpose and locations of the displacement history output nodes.
0 10 20 30 40 50 60 70 800
20
40
60
80
100
120
Frequency (Hz)
Am
plitu
de
Fig. 8. (a) Hanning windowed external excitation force (32 Hz 9 circles sin wave)
and (b) its FFT transform.
Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–12 7
new extensional mode E51 starts propagating, which is convertedfrom an expansion wave X51. It is concluded from Fig. 3(b) thatthe fastest propagating waves are associated with those ofextensional motions, which are relatively non-dispersive exceptaround the locations of veering, and from Fig. 3(b) and (a),respectively, where a higher order flexural wave has a slowertraveling speed and a longer wavelength along the propagatingdirection.
For comparison purposes, the dispersion relationship pre-dicted by a corresponding classical plate on a Winkler foundationis briefly derived in Appendix A and solved numerically forseveral given wave numbers. The differences between the fre-quency results predicted by the classical theory of plates and thismethod is summarized in Table 1. The classical plate on a Winklerfoundation can only predict the flexural modes, and, generallyspeaking, the prediction errors become larger as the wave numberincreases and the order of the wave mode increases, which is aconsequence of the approximate nature of the classical theoryused to describe the plate.
4.2. Numerical results for different Winkler foundation stiffness
One of the most important features of the guided wave is thecutoff frequency characterizing a boundary between a pass bandand a stop band. In the work on vibration control and designingoptical, electronic and acoustic devices, the material or structureis often designed to have desirable pass bands and stop bandsusing the cutoff features of the propagating waves in the system(e.g., [12–13]). To access the effects of foundation stiffness, here-after, the cutoff frequencies for the waves shown in Fig. 3 arecompared. The geometry and physical properties of the plate arethe same as those in Eq. (30) but with foundations of variousstiffnesses: kf¼0.0–5.0�109 N/m3. Fig. 5 shows the variation incutoff frequencies as a function of foundation stiffness.
As expected, because the Winkler foundation is decoupledfrom the structure and takes only the displacements normal tothe plate into account, only those propagating modes that have adisplacement component in the normal direction are affected inFig. 5, i.e., the flexural modes, and it is apparent that the platewith a stiffer Winkler foundation has higher cutoff frequencies forthe flexural modes. Here, the Winkler foundation acts as a lowfrequency band-stop filter for the flexural modes, and a stifferWinkler foundation leads to wider widths of these stop bands. Inearthquake engineering, structural damage is often related to thelinear amplification of seismic waves passing through soft soillayers near the earth’s surface [32,33], which is correct for smallamplitudes of motion or small strains in the soil [32]. From thewave propagation point of view in this Winkler model of afoundation, this phenomenon can be explained by the passingeffect of the soft site and filtering or suppressing effect of thestiffer site for the more destructive propagating flexural modes.
4.3. Verification by comparing with the available results for a freely
supported plate
Published results exist for a freely supported thick plate in [20](called a rectangular bar in the reference), so an important test isto check whether the program presented here can obtain thesame results. Taken from [20], the plate has a Poisson’s ratio m of0.3 and a height to width ratio H/B of 0.5. Because of the absenceof a Winkler foundation and the double symmetric geometry ofthe plate cross section, only one-quarter of the cross sectionrequires discretization. Four separate and uncoupled waveformscan be extracted: extension, torsion, and flexures about the x axisand y axis. The results obtained by this program are compared
with those presented by Taweel et al. [20] in Fig. 6, whereagreement with the published results can be seen.
4.4. Verification by performing a time domain analysis of a plate-
Winkler foundation system
To verify the results in the time domain and to show howthese results can be used to predict the time domain behavior of aphysical plate-Winkler system, a time domain analysis wasperformed through a finite element simulation of the plate-Winkler foundation system studied in Section 4.1. As predictedin Section 4.1 and denoted in Fig. 3(a) and (b), only three modes,F11, F22 and E31, which propagate with group velocities of268.7 m/s, 200.2 m/s and 1153 m/s, respectively, and have modeshapes shown in Fig. 4 can be excited by an input of 32 Hz. Thegoal of the analysis is to check whether the simulated responsesare composed only of the three modes by an external excitation of32 Hz and whether the three modes propagate at the velocitiespredicted by the results.

Mode F11 (in-phase)Mode F22 (anti-phase)
Disp
lace
men
t (m
)
Time (s)
y-component, L5, R5 nodes
Fig. 10. L5 and R5 nodes y-component displacement history results of the time
domain verification analysis.
Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–128
The commercial finite element program Abaqus/Explicit [34]was used for the simulation. The element used for the plate wasC3D8, which is 8-node linear brick element, and the Winklerspring was SpringA, which is 2-node axial spring element. Theplate-Winkler system has the same properties as in Eq. (30) buthas a 400 m finite length. This long length facilitates the separa-tion of wave modes from each other without interference fromthe end reflections. A schematic of the model is shown in Fig. 7. Asshown in Fig. 7 (also refer to Fig. 1), the node in the upper leftcorner of the plate was chosen to be the excitation point. Theexternal force was applied on the node in the x, y, and z directionssimultaneously. The position and directions of the excitation wereappropriate for representing a general vibration source andexciting most modes in the system. Fig. 8(a) shows the appliedexternal force, which is a 9 circle sinusoidal wave of 32 Hzwindowed by a Hanning window to reduce the spectral leakagecaused by the truncation of the finite circles in the time domain.Its FFT transform is given in Fig. 8(b). As shown in Fig. 8(b), thereal frequency content of the excitation has a range of about10–50 Hz and is spread out over the desired frequency of 32 Hz.The displacement histories of nodes Li, Mi and Ri, i¼0–6, asdenoted in Fig. 7, were recorded during the analysis.
Consistent with the wave propagation model, no damping wasassumed in the Abaqus analysis. The time incrementation schemeused was decided by Abaqus/Explicit automatically. Abaqus/Explicit uses an adaptive algorithm to determine conservativebounds for the highest element frequency. The mesh size in thewave propagation direction was chosen such that the propagatingwave of interest with the shortest wavelength 4.44 m (F11 mode)was resolved spatially with at least 20 elements per wavelength.The element length used was set to 0.15 m. Obviously, a study ofthis wave propagation problem using the finite element methodhas a very high computational cost and is not so realistic inpractice.
The results of the x, y, and z component displacements of theM5 node are shown as an example of results in Fig. 9(a–c),
Mode E31
Mode F22
E31 Reflection
Disp
lace
men
t (m
)
Time (s)
component, M5 node
Mode E31
Dis
plac
emen
t (m
)
T
z-compo
Fig. 9. M5 node displacement history results of the time domain verificati
respectively. Apparently, there are only three modes excited. Byreferring to the 3D displacement fields shown in Fig. 4, theoverwhelming wave packages of Mode F22 in Fig. 9(a), modeF11 and F22 in Fig. 9(b), and Mode E31 in Fig. 9(c) can beunderstood. The y-component waves of the Li and Ri nodeslocated on the two sides of plate are in anti-phase for the F22mode (Fig. 4(c)) and in-phase for the F11 mode (Fig. 4(a)). Thesemodes can be readily observable in Fig. 10, which shows the y-component displacement of the L5 and R5 nodes together.
Knowing the distance between two nodes, the group velocityof each wave package can be evaluated. Here, the peak of eachwave package is used to accurately determinate the time delayassociated with the mode. Fig. 11 shows the y and z componentdisplacements of the M4, M5 and M6 nodes together, from whichthe velocities were calculated as 266.5 m/s, 199.5 m/s and1158.3 m/s for modes F11, F22 and E31, respectively. There is agood agreement with the velocities of 268.7 m/s, 200.2 m/s and1153 m/s predicted by the results in Fig. 3(b).
Mode F11
Mode F22
F11 Reflection
Disp
lace
men
t (m
)
Time (s)
component, M5 node
E31 Reflection
ime (s)
nent, M5 node
on analysis: (a) x-component, (b) y-component, and (c) z-component.

Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–12 9
5. Application example of a barrier design for vibrationcontrol
Vibration is a major environmental concern throughout theworld. In the problem of a plate on a foundation, the flexuralmotions can cause large strains or radiation of noise in the sidesof plate. Thus, from the wave propagation point of view, the goalof vibration control is to suppress the flexural modes. In thissection, the same problem as the one studied in Section 4.4 isconsidered, and the propagating flexural modes, F11 and F22,excited by the 32 Hz frequency input, are to be controlled througha barrier design by applying the knowledge gained from theprevious results.
Fig. 5 in Section 4.2 shows that it is possible to suppress thefirst and second order flexural modes at a frequency of 32 Hz bysimply improving the foundation to a stiffer one, i.e., larger thankf¼0.4�109 N/m3. However, the full improvement of the founda-tion under the plate is not easy or even possible in practice. Thus,an alternative design is proposed by constructing a suitable wavebarrier (local improvement of soil) in the path of the propagatingwaves, as shown in Fig. 12. As an example of an application, adesigned foundation stiffness of kf¼1.0�109 N/m3 is chosen, and
Calculated velocity of F11 wave package: 266.5m/s;F22 wave package: 199.5m/s.
Mode F11
Mode F22
ReflectionDisp
lace
men
t (m
)
Time (s)
y-component, M4, M5, M6 nodes
Calculated velocity of E31 wave package: 1158.3 m/s.
Mode E31 Reflection
Disp
lace
men
t (m
)
Time (s)
z-component, M4, M5, M6 nodes
Fig. 11. M4, M5 and M6 nodes displacement history results of the time domain
verification analysis: (a) y-component, and (b) z-component.
only one design variable d is considered. This proposed design hasthe advantage of being easy in practice and not causing disconti-nuity in the plate.
The propagating modes excited by the 32 Hz frequency input,F11 and F22, have wavelengths of lF11¼4.44 m and lF22¼6.87 m,respectively, which can be calculated from their wave numbers, asshown in Fig. 3(a). The analysis was carried out for cases of d¼0.0,d¼ lF11=4, d¼ lF11=2, d¼ 3lF11=4, d¼lF11, d¼lF22, d¼2lF22, andd¼220 m. Fig. 13 summarizes the maxima of the y-componentdisplacement history of the nodes L5, M5 and R5 after the barrier forthe different cases studied. Fig. 14(a–c) gives the typical y-compo-nent displacement history results of the nodes L5 after the barrierfor cases d¼0.0, d¼ lF11=4 and d¼220 m, respectively.
The effectiveness of the design is clearly seen in Fig. 13. Abarrier length of lF11=4 is sufficient to obtain a satisfactorilyreduction result. A barrier length longer than lF22 makes theextensional mode E31 dominant even in the y-component historyof the nodes after the barrier. Fig. 14(c) shows this effect clearly.Because of this dominant behavior of the E31 mode and the effectthe design has only on flexural modes, a further barrier lengthincrease would not cause a further reduction of the amplitude.
The effective vibration reduction design requires the knowl-edge of wave propagation in the system because the reductioneffects depend on the frequency of vibration source, which canalso be found in many real cases and papers in the literature, e.g.,[7], where the authors conducted field experiment studies using
Fig. 12. Schematic of the wave barrier design for the vibration control.
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Max
imum
y-d
ispl
acem
ent
d
R5 node
M5 node
L5 node
d=λF11/4
d=λF11/2
d=3λF11/4d=λF11 d=λF22
d=2λF22
Fig. 13. Maximum y-component displacements of nodes L5, M5 and R5 after the
barrier for different cases; d is non-dimensionalized by wavelength lF11, while the
displacement by the maximum y-component displacement for case d¼0.0.

Mode F22 wave package
Mode F11 wave package
Dis
plac
emen
t (m
)
Time (s)
y-component, L5 node, d=0.0 m
Reduced Mode F22 wave package
Reduced Mode F11 wave package
Dis
plac
emen
t (m
)
Time (s)
y-component, L5 node, d=1.11 m
Suppressed Mode F11, F22, and dominant Mode E31 wave packages
Dis
plac
emen
t (m
)
Time (s)
y-component, L5 node, d=220 m
Fig. 14. y-component displacement histories of node L5 after the barrier: (a) case d¼0.0 m, (b) case d¼lF11/4¼1.11 m, and (c) case d¼220.0 m.
Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–1210
open and in-filled trench barriers to reduce the impact of soilvibrations on the structural response for both active and passiveisolation cases. However, for the plate-foundation system, thereduction measures in [7] may not work because the waves canpropagate with more vibration energy through the supportedplate as well.
Similar to many engineering design practices, the applicationexample concerns the selection of a Winkler soil parameter usingthe cutoff feature of the propagating wave. More features of thepropagating waves can be exploited for practical uses, one goodexample of which is in [11], where much information on wavesexcitable by a high-speed train viaduct and in the bellowing soilare extracted from the dispersion curves. Then, a honeycombwave impeding barrier is designed theoretically to modulate thewaves and prevent undesirable waves from propagating throughthe soil into nearby buildings.
6. Summary and conclusions
This paper presents a variational statement in the field ofcomplex numbers and its semi-analytical solution to study theproblem of wave propagation in plates resting on a Winklerfoundation, in which the continuous medium model is usedbecause it has the ability to catch all propagating modes in thesystem. The method and its computer program are verified by(1) comparing with the available result for a freely supportedthick plate and (2) performing a time domain analysis for aphysical plate-Winkler foundation system. The latter also servesas an example to show how the results can be used to predict thetime domain behavior of a physical plate resting on a Winklerfoundation.
The results are given for symmetric motions and in the formsof wave number and group velocity for the five lowest-orderpositive direction waves in the frequency range studied. A varietyof wave propagation phenomena is observed, and useful informa-tion about the propagating waves in the system can be readily
extracted from the results. In parametrical studies, the foundationis found to act as a low frequency band-stop filter for flexuralmodes, and a stiffer foundation leads to wider widths of thesestop bands. As an application example, a barrier design forcontrolling flexural motions in the plate-Winkler foundationsystem is proposed, and its effectiveness is also demonstrated.The effectiveness of controlling flexural motion is attributed tothe inherent properties of the propagating wave in the system,and no material damping contributes.
Acknowledgment
The authors acknowledge the anonymous reviewers forinvaluable comments that strengthened an earlier draft of thismanuscript. The first author also acknowledges his Ph.D. scholar-ships from Nagoya University and the China Scholarship Councilunder the State Scholarship Fund (File no. 2008615006).
Appendix A
Let w (x,y,t) be the transverse displacement of the plate. Takingthe resistive force of the Winkler foundation into account andfollowing the derivation of classical plate (e.g., [35]), the followingequation for the case of a classical plate resting on Winklerfoundation can be obtained:
D@4w
@x4þ2
@4w
@x2@y2þ@4w
@y4
!þrh
@2w
@t2þkf w¼ 0 ðA:1Þ
where r is the density, h is the plate thickness, D¼Eh3/12(1�m2)and kf is the Winkler stiffness. Consistent with the examplesstudied in this paper, only half of the plate-foundation system ismodeled using the symmetry condition about the y¼0 middleplane, and, to extract the symmetric motions propagating in the x
direction, the system is assumed to have a symmetry boundarycondition along the y¼0 edge in addition to the free edge along

Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–12 11
the y¼B/2 edge
Qy9y ¼ 0,y ¼ B=2 ¼�D@3w
@y3þ
@2w
@x2@y
!¼ 0,jy9y ¼ 0 ¼
@w
@y¼ 0,
Tyx9y ¼ 0,y ¼ B=2 ¼� 1�m� �
D@2w
@x@y¼ 0,My9y ¼ B=2
¼�D@2w
@y2þm @
2w
@x2
!¼ 0 ðA:2Þ
where B is the width of the plate-foundation system and jy, Qy,My and Tyx are the slope, shear force, bending and twistingmoments, respectively.
For harmonic waves with frequency o, waves have thefollowing plane wave form:
w¼ ~w y,oð Þ exp i kx�otð Þ ðA:3Þ
where ~w is the complex amplitude and k is the complex wavenumber. By substituting Eq. (A.3) into Eq. (A.1), the followingfourth order differential equation governing the waves is found
Dd4 ~w
dy4�2k2 d2 ~w
dy2þ ~wk4
!�rho2 ~wþkf ~w ¼ 0 ðA:4Þ
The solution of the differential equation requires carefulattention to boundary equations. Remarkable difficulties can arisein the statement of boundary conditions, and finding the analy-tical solution, even with the very simple boundary conditions, israther complex or not possible in the present case. For onlycertain special cases, as with the usual solution of differentialequations, a solution can be assumed that satisfies the boundaryequations beforehand, e.g., Navier trigonometric series for thecase of simply supported boundaries. The general solution toEq. (A.4) is
~w yð Þ ¼w1 exp ir1yð Þþw2 exp ir2yð Þþw3 exp ir3yð Þþw4 exp ir4yð Þ
r1 ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�k2þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffirho2�kf
D
svuut,r2 ¼�r1,r3
¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�k2�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffirho2�kf
D
svuut,r4 ¼�r3, ðA:5Þ
where wi,i¼ 124 are constants. It should be noted that acomplete solution requires only four boundary conditions forthe fourth order equation rather than the six in Eq. (A.2). Thisproblem can be solved by replacing the twisting moment with theequivalent shear forces�@Tyx/@x according to Saint-Venant’s prin-ciple. Therefore, the boundary shear force conditions are
Qy9y ¼ 0,y ¼ B=2 ¼�D@3w
@y3þ
@2w
@x2@y
!�@Tyx
@x¼ 0 ðA:6Þ
Forcing the solution Eq. (A.5) to fit the physical boundaryconditions yields the following equation:
A½ � w1 w2 w3 w4 T
¼ 0, and A½ � ¼
ir1 �ir13�ir1 2�m
� �k2
�r12�mk2
� �exp ir1B
2
� ��ir1
3�ir1 2�m� �
k2� �
exp ir1B2
� �ir2 �ir2
3�ir23 2�m� �
k2�r2
2�mk2� �
exp ir2B2
� ��ir2
3�ir2 2�m� �
k2� �
exp ir2B2
� �ir3 �ir3
3�ir33 2�m� �
k2�r3
2�mk2� �
exp ir3B2
� ��ir3
3�ir3 2�m� �
k2� �
exp ir3B2
� �ir4 �ir4
3�ir43 2�m� �
k2�r4
2�mk2� �
exp ir4B2
� ��ir4
3�ir4 2�m� �
k2� �
exp ir4B2
� �
2666666664
3777777775
T
ðA:7Þ
The determinant of the coefficients must vanish for nontrivialsolutions of wi to exist, which gives the equation, i.e., 9[A]9¼0,that describes the dispersion relationship (complex k as a func-tion of real o). It is impossible to solve the dispersion equationexplicitly for k in terms of o or o in terms of k, and, when solving
the dispersion equation numerically, only the real solutions of theequation, i.e., real k, are interesting because they represent thepropagating modes of the system.
References
[1] Allotey Nii, Hesham El. Naggar M. Analytical moment-rotation curves forrigid foundations based on a Winkler model. Soil Dynamics and EarthquakeEngineering 2003;23(5):367–81.
[2] Huang M-H, Thambiratnam DP. Dynamic response of plates on elastic founda-tion to moving loads. ASCE Journal of Engineering Mechanics 2002;128(9):1016–22.
[3] Matsunaga Hiroyuki. Vibration and stability of thick plates on elasticfoundations. ASCE Journal of Engineering Mechanics 2000;126(1):27–34.
[4] Kim Seong-Min. Buckling and vibration of a plate on elastic foundationsubjected to in-plane compression and moving loads. International Journal ofSolids and Structures 2004;41(20):5647–61.
[5] Wen PH, Aliabadi MH. Boundary element formulations for Mindlin plate onan elastic foundation with dynamic load. Engineering Analysis with BoundaryElements 2009;33(10):1161–70.
[6] Variyart W, Brennan MJ. Active control of the n¼2 axial propagating wave inan infinite in vacuo pipe. Smart Materials and Structures 2004;13:126–33.
[7] Celebi Erkan, Firat Seyhan, Beyhan Gunay, Cankaya Ilyas, Vural Isa,Kırtel Osman. Field experiments on wave propagation and vibration isolationby using wave barriers. Soil Dynamics and Earthquake Engineering2009;29(5):824–33.
[8] Todorovska MI, Ivanovic SS, Trifunac MD. Wave propagation in a seven-storyreinforced concrete building: I. Theoretical models. Soil Dynamics andEarthquake Engineering 2001;21(3):211–23.
[9] Todorovska MI, Ivanovic SS, Trifunac MD. Wave propagation in a seven-storyreinforced concrete building: II. Observed wavenumbers. Soil Dynamics andEarthquake Engineering 2001;21(3):225–36.
[10] Trifunac MD, Ivanovic SS, Todorovska MI. Wave propagation in a seven-storyreinforced concrete building: III. Damage detection via changes in wave-numbers. Soil Dynamics and Earthquake Engineering 2003;23(1):65–75.
[11] Takemiya Hirokazu. Field vibration mitigation by honeycomb WIB for pilefoundations of a high-speed train viaduct. Soil Dynamics and EarthquakeEngineering 2004;24(1):69–87.
[12] Barbarosie C, Neves MM. Periodic structures for frequency filtering: analysisand optimization. Computers & Structures 2004;82:1399–403.
[13] Rupp Cory J, Evgrafov Anton, Dunn Martin L. Design of phononic materials/structures for surface wave devices using topology optimization. Structuraland Multidisciplinary Optimization 2007;34(2):111–21.
[14] Asiri S. Tunable mechanical filter for longitudinal vibrations. Shock andVibration 2007;14(5):377–91.
[15] Lee Tae Hun, Choi Ik Hwang, Jhang Kyung Young. Single-mode guided wavetechnique using ring-arrayed laser beam for thin-tube inspection. NDT & EInternational 2008;41(8):632–7.
[16] Mei C. Hybrid wave/mode active control of bending vibrations in beamsbased on the advanced Timoshenko theory. Journal of Sound and Vibration2009;322:29–38.
[17] Waki Y, Mace BR, Brennan MJ. Free and forced vibrations of a tyre using awave/finite element approach. Journal of Sound and Vibration 2009;323(3–5):737–56.
[18] Ivan Bartoli Alessandro Marzani, di Scalea Francesco Lanza, Viola Erasmo.Modeling wave propagation in damped waveguides of arbitrary cross-section. Journal of Sound and Vibration 2006;295(3–5):685–707.
[19] Finnveden S. Evaluation of modal density and group velocity by a finiteelement method. Journal of Sound and Vibration 2004;273(1–2):51–75.
[20] Taweel H, Dong SB, Kazic M. Wave reflection from free end of a cylinder withan arbitrary cross-section. International Journal of Solids and Structures2000;37:1701–26.
[21] Moore Ian D, Brachman Richard W. Three-dimensional analysis of flexiblecircular culverts. Journal of Geotechnical Engineering 1994;120(10):1829–44.
[22] Fernando NSM, Small JC, Carter JP. Elastic analysis of buried structuressubject to three-dimensional surface loading. International Journal forNumerical and Analytical Methods in Geomechanics 1996;20:331–49.
[23] Taciroglu E, Liu CW, Dong SB, Chun CK. Analysis of laminated piezoelectriccircular cylinders under axisymmetric mechanical and electrical loads with asemi-analytic finite element method. International Journal of Solids andStructures 2004;41(18-19):5185–208.
[24] Taciroglu E, Liu CW. Analysis and design of multimodal piezoelectric layeredtubular sensors and actuators. Smart Materials and Structures 2005;14:605–14.
[25] Liu CW, Taciroglu E. A semi-analytic meshfree method for Almansi-Michellproblems of piezoelectric cylinders. International Journal of Solids andStructures 2008;45(9):2379–98.
[26] Kohn W, Krumhansl JA, Lee EH. Variational methods for dispersion relationsand elastic properties of composite materials. ASME Journal of AppliedMechanics 1972;39:327–36.
[27] Mobley Joel. The time-domain signature of negative acoustic group velocityin microsphere suspensions. The Journal of the Acoustical Society of America2007;122(1):EL8–14.

Z. Lin, A. Kasai / Soil Dynamics and Earthquake Engineering 46 (2013) 1–1212
[28] Kwak Jin Ho, Hong Sungpyo. Linear algebra. 2nd ed. New York: Springer;2004.
[29] Patzak B, Bittnar Z. Design of object oriented finite element code. Advances inEngineering Software 2001;32(10–11):759–67.
[30] Gomes Francisco M, Sorensen Danny C. ARPACKþþ 2000, /http://www.i-me.unicamp.br/�chico/arpackþþ/S.
[31] Sorensen DC, Lehoucq RB, Yang C, Maschhoff K. ARPACK 1996, /http://www.caam.rice.edu/software/ARPACK/S.
[32] Trifunac MD. Non linear soil response as a natural passive isolation mechan-ism. Paper II. The 1933, Long Beach, California earthquake. Soil Dynamics andEarthquake Engineering 2003;23(7):549–62.
[33] Safak Erdal. Local site effects and dynamic soil behavior. Soil Dynamics andEarthquake Engineering 2001;21(5):453–8.
[34] Dassault Syst�emes Simulia Corp., Abaqus/Explicit, version 6.7-5, 2007.[35] Genta Giancarlo. Vibration dynamics and control. 1st ed. New York: Springer;
2008.