Embed Size (px)
Citation preview

Universität LeipzigFakultät für Biowissenschaften, Pharmazie und Psychologie
Institut für Biochemie
Skript zum Tutorium
Grundlagen der höheren Mathematik fürBiochemie- und Pharmaziestudenten
Alice Abend
Leipzig, April 2017


Inhaltsverzeichnis1 Vorwort 3
2 Grundlagen der Differenzialrechnung 52.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Differenzenquotient & Differenzialquotient . . . . . . . . . . . 62.3 Rechenregeln . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4 Wichtige Ableitungen . . . . . . . . . . . . . . . . . . . . . . . 82.5 Funktionen von mehreren Variablen & partielle Ableitungen . 92.6 Totales Differenzial . . . . . . . . . . . . . . . . . . . . . . . . 112.7 Nabla- & Laplaceoperator . . . . . . . . . . . . . . . . . . . . 13
2.7.1 Der Gradient eines Skalarfeldes . . . . . . . . . . . . . 142.7.2 Die Divergenz eines Vektorfeldes . . . . . . . . . . . . . 162.7.3 Die Rotation eines Vektorfeldes . . . . . . . . . . . . . 18
3 Grundlagen der Integralrechnung 203.1 Motivation & Herleitung . . . . . . . . . . . . . . . . . . . . . 203.2 Rechenregeln . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3 Wichtige Integrale . . . . . . . . . . . . . . . . . . . . . . . . 243.4 Mehrfachintegrale . . . . . . . . . . . . . . . . . . . . . . . . . 243.5 Linienintegrale . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4 Differenzialgleichungen 32
5 Komplexe Zahlen 36
6 Fehlerrechnung 38
1

2

1 VorwortDieses Skript dient begleitend zum Tutorium zur Unterstützung des Ver-ständnisses der vorgestellten mathematischen Sachverhalte und für spätereSemester als kleines Nachschlagewerk. Es erhebt in keinem Fall den Anspruchder Vollständigkeit und kann nur einen ersten Überblick über einige Konzepteder höheren Mathematik geben. Im Tutorium soll der mathematische Schul-stoff aufgefrischt und bestehende Wissenslücken geschlossen werden. Darüberhinaus dient der Kurs dazu, an Symbolik und Ausdrücke der Mathematik aufuniversitärem Niveau heranzuführen und somit Verständnisprobleme in denVorlesungen zu reduzieren.Das Skript beinhaltet Herleitungen, häufig verwendete Notationen, wichtigeRechenregeln und einige Beispielrechnungen. Die meisten Übungsaufgaben,welche im Tutorium durchgerechnet werden, tauchen in diesem Skript abernicht auf.Als weiterführende Literatur empfehle ich das Buch „Formeln und Hilfen zurHöheren Mathematik“ aus dem Binomi Verlag als Formelsammlung und dieReihe der „Gelben Rechenbücher“ aus dem Furlan Verlag zum Nachvollzie-hen von häufig verwendeten Rechenverfahren.Auch nach gewissenhafter und gründlicher Erstellung dieses Skriptes habensich möglicherweise kleine Fehler eingeschlichen. Ich bin dankbar für Hinweisediesbezüglich.
3

4

2 Grundlagen der Differenzialrechnung
2.1 MotivationDie Differenzialrechnung ist ein Teilgebiet der Analysis und ist aus Wissen-schaft und Forschung nicht mehr wegzudenken. Anwendung findet sie bei-spielsweise in der Kinetik oder Thermodynamik von chemischen Reaktionen.Aber auch in scheinbar profanen Alltagsproblemen begegnet uns die Diffe-rentialrechnung. So unterscheidet man beim Autofahren für gewöhnlich zwi-schen der Momentangeschwindigkeit auf dem Tacho und der Durchschnitts-geschwindigkeit, welche während einer Autofahrt erreicht wurde.
In Abbildung 1 ist ein Weg-Zeit-Diagramm für zwei verschiedene Bewegungs-arten dargestellt. Die blaue Kurve zeigt eine Bewegung konstanter Geschwin-digkeit wohingegen die rote Kurve eine beschleunigte Bewegung beschreibt.
500
400
300
200
100
0
Weg
s /
m
100806040200
Zeit t / s
Abbildung 1: Weg-Zeit-Diagramm für eine Bewegung konstanter Geschwin-digkeit (blaue Kurve) und eine gleichmäßig beschleunigte Bewegung (roteKurve).
Die Durchschnittsgeschwindigkeit v lässt sich für beide Kurven mit Hilfe derFormel
v = ∆s∆t (1)
berechnen, wobei ∆s und ∆t den insgesamt zurückgelegten Weg und die da-für benötigte Zeit angeben. Für die Bewegung konstanter Geschwindigkeit
5
der blauen Kurve gilt Momentangeschwindigkeit = Durchschnittsgeschwin-digkeit. Im Falle der beschleunigten Bewegung (rote Kurve) lässt sich dieMomentangeschwindigkeit nicht so ohne Weiteres angeben. Sie nimmt fürjeden Zeitpunkt der Fahrt einen anderen Wert an. Ihre Berechnung wird imnächsten Abschnitt erläutert.
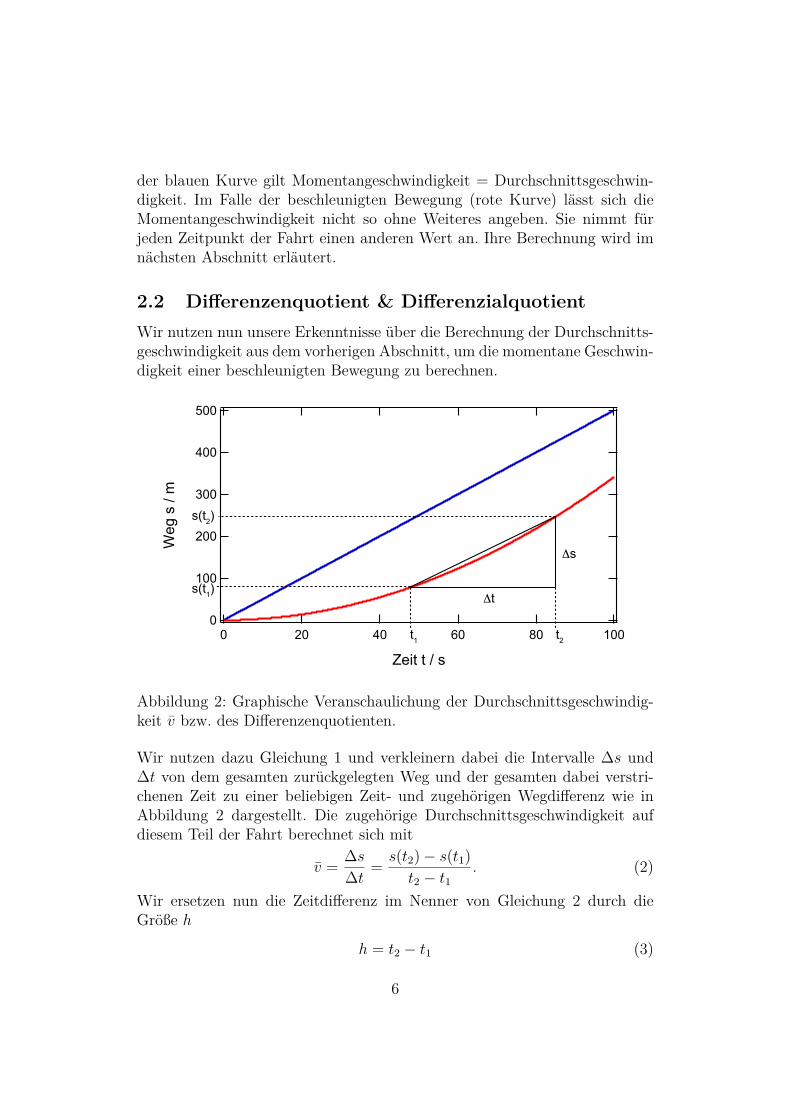
2.2 Differenzenquotient & DifferenzialquotientWir nutzen nun unsere Erkenntnisse über die Berechnung der Durchschnitts-geschwindigkeit aus dem vorherigen Abschnitt, um die momentane Geschwin-digkeit einer beschleunigten Bewegung zu berechnen.
500
400
300
200
100
0
Weg
s /
m
100806040200
Zeit t / s
Δs
Δt
t1 t2
s(t1)
s(t2)
Abbildung 2: Graphische Veranschaulichung der Durchschnittsgeschwindig-keit v bzw. des Differenzenquotienten.
Wir nutzen dazu Gleichung 1 und verkleinern dabei die Intervalle ∆s und∆t von dem gesamten zurückgelegten Weg und der gesamten dabei verstri-chenen Zeit zu einer beliebigen Zeit- und zugehörigen Wegdifferenz wie inAbbildung 2 dargestellt. Die zugehörige Durchschnittsgeschwindigkeit aufdiesem Teil der Fahrt berechnet sich mit
v = ∆s∆t = s(t2)− s(t1)
t2 − t1. (2)
Wir ersetzen nun die Zeitdifferenz im Nenner von Gleichung 2 durch dieGröße h
h = t2 − t1 (3)
6

und erhalten somit
v = s(t1 + h)− s(t1)h
. (4)
Gleichung 4 wird auch als Differenzenquotient bezeichnet und gibt den An-stieg derjenigen Sekante an, welche die Funktion s(t) in s(t1) und s(t2) schnei-det.Umso kleiner die Zeit- und zugehörigen Wegintervalle sind, welche dabei be-trachtet werden, desto weiter nähert sich der Wert des Differenzenquotientenan die tatsächliche Momentangeschwindigkeit an. Im Grenzfall von unendlichkleinen Zeitintervallen also h→ 0 geht die Sekante an den Funktionsgraphenin eine Tangente über und wir erhalten ausgehend von Gleichung 4 den Dif-ferenzialquotienten
v = limh→0
s(t1 + h)− s(t1)h
= s′(t1) = dsdt
∣∣∣∣t=t1
. (5)
Dieser ist gleichbedeutend mit der mathematischen Formulierung der Ablei-tung der Funktion s(t) und gibt die Momentangeschwindigkeit an der Stellet1 an.Die Ableitung einer beliebigen Funktion f(x) lässt sich immer mit Hilfe desin Gleichung 5 gezeigten Differenzialquotienten schreiben und spielt dabeiselbstverständlich nicht zwangsläufig die Rolle der Geschwindigkeit gibt aberin jedem Fall den Anstieg der betreffenden Funktion an einer bestimmtenStelle an. Man schreibt allgemeiner:
f ′(x0) = dfdx
∣∣∣∣x=x0
= limh→0
f(x0 + h)− f(x0)h
. (6)
An Hand eines Beispieles wird im Folgenden die Berechnung der ersten Ab-leitung einer Funktion f(x) mit Hilfe des Differenzialquotienten verdeutlicht
Es sei die Parabelfunktion f(x) = x2 gegeben. Wird von dieser Funktionder Differenzialquotient 6 gebildet, so erhalten wir:
f ′(x) = limh→0
(x+ h)2 − x2
h(7)
= limh→0
x2 + 2xh+ h2 − x2
h
= limh→0
2xh+ h2
h= lim
h→0(2x+ h)
= 2x.
7

2.3 RechenregelnSeien f und g reelle differenzierbare Funktionen, n und a reelle Zahlen, danngilt:
• Potenzregel
(xn) ′ = nxn−1 (8)
• Faktorregel
(a · f)′ = a · f ′ (9)
• Summenregel
(f + g)′ = f ′ + g′ (10)
• Produktregel
(f · g)′ = f ′ · g + f · g′ (11)
• Quotientenregel (f
g
)′ = f ′ · g − f · g′
g2 (12)
• Kettenregel
(f g)′ = (f(g(x))) ′ = f ′(g(x)) · g′(x) (13)
2.4 Wichtige AbleitungenDie folgenden Ableitungen treten häufig auf:
f(x) = ex f ′(x) = ex
f(x) = ln(x) f ′(x) = 1x
f(x) = sin(x) f ′(x) = cos(x)f(x) = cos(x) f ′(x) = − sin(x)
(14)
8

2.5 Funktionen von mehreren Variablen & partielleAbleitungen
Bisher haben wir hier lediglich Funktionen betrachtet, welche nur von einereinzigen Variable abhängen. Im Allgemeinen können Funktionen aber vonbeliebig vielen Variablen abhängen. In diesem Abschnitt soll der Begriff derAbleitung für solche Funktionen definiert werden.
Ein Beispiel für eine Funktion mehrerer Veränderlicher aus der Vorlesungist die Zustandsgleichung des idealen Gases:
f(p, V, T ) = pV = nRT. (15)
Diese Funktion hängt von den Größen Druck p, Volumen V und TemperaturT ab. n ist dabei die Stoffmenge und R bezeichnet die universelle Gaskon-stante.
Funktionen mehrerer Veränderlicher können nach jeder ihrer Variablen ein-zeln abgeleitet werden. Das bezeichnet man als partielle Ableitung. Dabeigelten die gleichen Rechenregeln wie für die „normale“Ableitung, welche inden vorigen Abschnitten zu finden sind. Diejenigen Variablen der Funktion,nach welchen gerade nicht abgeleitet wird, werden als konstante Faktorenbzw. konstante Summanden betrachtet. Demzufolge gelten für diese Varia-blen dann auch die gewöhnlichen Ableitungsregeln für konstante Faktorenbzw. Summanden.
Die Notation für die partiellen Ableitungen der Funktion f(x, y) nach derVariable x bzw. y lautet:
f = f(x, y) ∂f
∂xbzw. ∂f
∂y. (16)
Zu beachten ist dabei das geschwungene ∂, welches eine partielle Ableitungsignalisiert. Dies bedeutet, dass man die Änderung der Funktion betrachtetwährend ein Argument geändert wird und alle anderen festgehalten werden.Demgegenüber steht die totale Ableitung welche bisher verwendet wurde unddurch ein d gekennzeichnet ist. In diesem Fall betrachtet man die Änderungder Funktion wenn ein Argument geändert wird. Die anderen Argumentewerden also in diesem Fall nicht festgehalten sondern können sich auch än-dern. Obwohl es auf den ersten Blick wie ein unwichtiges Detail erscheint istder Unterschied wichtig.
Als erstes Beispiel soll die Funktion f(x, y) dienen, wobei jedes Argumentder Funktion wieder eine Funktion eines anderen Argumentes, z. B. t, ist.
9

Man sollte also genauer schreiben f(x(t), y(t)). Dies könnte zum Beispieleine Funktion sein, die vom Ort x(t) und der Geschwindigkeit y(t) abhängt.Offensichtlich ist sowohl der Ort als auch die Geschwindigkeit wieder eineFunktion der Zeit t. Nun kann man den Unterschied zwischen partieller undtotaler Ableitung sehen: Bei der partiellen Ableitung der Funktion f nach twerden alle anderen Argumente (x und y) festgehalten. Da die Funktion fnicht explizit von t abhängt folgt, dass
∂f
∂t= 0 (17)
Bei der totalen Ableitung ist die Frage allerdings, wie sich die Funktion ändertwenn man t ändert ohne die anderen Argumente festzuhalten. Das heißt, mitder Kettenregel,
df
dt= ∂f
∂x
dx
dt+ ∂f
∂y
dy
dt(18)
Offensichtlich ist ∂f/∂t 6= df/dt. Der Unterschied wird in Kürze, bei der Defi-nition des totalen Differenzials, wieder auftauchen. Sind die Argumente einerFunktion allerdings nicht selbst Funktionen, so gibt es keinen Unterschiedzwischen totaler und partieller Ableitung.
Ist beispielsweise f(x, y, z) = x2 + y3 + z4, so werden bei der Ableitungnach x die Argumente y und z als konstant angesehen, das heißt
∂f
∂x= ∂x2
∂x+ ∂y3
∂x+ ∂z4
∂x= 2x+ 0 + 0 = 2x (19)
Dasselbe gilt für die andern Ableitungen, also∂f
∂y= 3y2,
∂f
∂z= 4z3 (20)
Beispiel zur partiellen Ableitung erster Ordnung: Die Zustands-gleichung des idealen Gases (Gleichung 15):
pV = nRT. (21)
Gesucht sind nun die ersten partiellen Ableitung dieser Funktion. Das Um-stellen der Gleichung 21 nach p liefert:
p(V, T ) = nRT
V. (22)
Der Druck p hängt also von den Variablen V und T ab. Für die partiellenAbleitungen gilt dann:
∂p∂V
= −nRTV 2
∂p∂T
= nRV.
(23)
10

Sofern eine Funktion zweimal stetig differenzierbar ist, lässt sie sich auch einzweites Mal ableiten. Die meisten Funktionen, die euch begegnen werden,lassen sich ein zweites Mal ableiten. Die zweite partielle Ableitung ist dannaber möglicherweise gleich null. Allgemein schreibt man in der Mathematikfür die zweiten partiellen Ableitungen von Funktionen f(x, y) nach x bzw. y:
∂2f
∂x∂x= ∂2f
∂x2 bzw. ∂2f
∂y∂y= ∂2f
∂y2 . (24)
Für die sogenannten gemischten zweiten Ableitungen, d.h. es wird nachein-ander nach verschiedenen vorkommenden Variablen partiell abgeleitet, giltder Schwarz’sche Vertauschungssatz :
∂2f(x, y)∂x∂y
= ∂2f(x, y)∂y∂x
. (25)
Voraussetzung dafür ist natürlich die Existenz der auftretenden partiellenAbleitungen und deren Stetigkeit in der Umgebung des betreffenden Punktes.Oft findet man die partiellen Ableitungen der Funktion f(x, y) auch in derfolgenden Notation:
∂f
∂x= fx bzw. ∂f
∂y= fy. (26)
Für die Ableitungen zweiter Ordnung schreibt man dann analog:
∂2f
∂x2 = fxx bzw. ∂2f
∂y2 = fyy bzw. ∂2f
∂x∂y= fxy. (27)
2.6 Totales DifferenzialDas totale Differenzial df einer Funktion f(x1, x2, . . . , xn) gibt die Änderungdf von dem Funktionswert f bei infinitesimalen (unendlich kleinen) Ände-rungen dx1, dx2, . . . , dxn der Argumente x1, x2, . . . , xn an:
df = ∂f
∂x1dx1 + ∂f
∂x2dx2 + · · ·+ ∂f
∂xndxn =
n∑i=1
∂f
∂xidxi. (28)
Das totale Differenzial enthält die im vorigen Abschnitt besprochenen partiel-len Ableitungen nach allen Variablen, von denen die Funktion f abhängt. DieBezeichnung totales Differenzial stammt daher, dass der Ausdruck in Glei-chung 28 die gesamte Information über die Ableitung der Funktion enthältund nicht nur die Ableitung in Richtung einer einzelnen Koordinatenachse.
11

Eine geometrische Veranschaulichung des totalen Differenzials ist in Abbil-dung 3 für eine Funktion f(x, y) gezeigt. Dargestellt ist ein infinitesimalesFlächenelement. Einer seiner Eckpunkte (x, y, f) wird als Ausgangspunkt ge-wählt. Um von dort aus zum Eckpunkt (x+ dx, y+ dy, f + df) zu kommen,bewegt man sich um dx entlang der x-Achse und um dy in y-Richtung. Dabeiändert sich der Funktionswert f um df .Nun gillt aber nicht einfach df = dx+ dy, da das Flächenelement nicht par-allel zur x − y-Ebene sondern gekippt im Raum liegt. Diese Neigung wirddurch die partiellen Ableitungen in x- bzw. y-Richtung, welche den Anstiegder Funktion f(x, y) in der jeweiligen Raumrichtung angeben, berücksichtigt.Es folgt also für df :
df = ∂f
∂xdx+ ∂f
∂ydy. (29)
Abbildung 3: Illustration zum totalen Differenzial einer Funktion f(x, y).Quelle: wikipedia.org
Als Beispiel dient nun wieder die allgemeine Gasgleichung. Es sei das to-tale Differenzial von dem Volumen V gesucht. Dazu wird die Gleichung 15zuerst nach der Größe V umgestellt:
V = nRT
p. (30)
12

Formal lautet das totale Differenzial aus Gleichung 28 für diesen Fall:
dV = ∂V
∂p
∣∣∣∣∣T
dp+ ∂V
∂T
∣∣∣∣∣p
dT. (31)
Nun müssen nur noch die auftretenden partiellen Ableitungen nach demDruck und der Temperatur berechnet und eingesetzt werden. Das führt aufdas totale Differenzial:
dV = −nRTp2 dp+ nR
pdT. (32)
2.7 Nabla- & LaplaceoperatorUnter einem Operator versteht man in der Mathematik eine Rechenvorschrift.Er überführt ein mathematisches Objekt in ein neues. Bisher bekannte Ope-ratoren sind +,−,×,÷, welche in der Addition, Subtraktion, Multiplikationund Division Anwendung finden. Außerdem ist aus der Funktionalanalsysisbereits der Differentialoperator d
dx für Ableitungen bekannt.
In diesem Abschnitt kommen nun zwei neue Operatoren hinzu: der Nabla-und der Laplaceoperator. Zuerst werden wir uns mit dem Nablaoperator be-schäftigen, dessen Symbol wie ein auf der Spitze stehendes Dreieck aussieht.Formal ist dieser Operator ein Vektor mit den partiellen Ableitungen alsKomponenten und erweitert somit den Differentialoperator für n Dimensio-nen. Der Nablaoperator tritt abhängig von dessen Verwendung sowohl alsZeilen- als auch als Spaltenvektor auf:
~∇ =(
∂∂x1, ∂
∂x2, . . . ∂
∂xn
)bzw. ~∇ =
∂∂x1∂∂x2...∂∂xn
. (33)
Im dreidimensionalen Fall reduziert er sich auf:
~∇ =(∂∂x, ∂
∂y, ∂
∂z
)bzw. ~∇ =
∂∂x∂∂y∂∂z
. (34)
In den folgenden Abschnitten werden drei verschiedene Wirkungsweisen desNablaoperators erläutert. Dafür ist es notwendig, zwischen skalaren Feldernund Vektorfeldern zu unterscheiden. Unter einem skalaren Feld f verstehtman dabei eine Abbildung, die jedem Punkt des Raumes eine reelle Zahl
13

zuordnet. Dagegen ordnet ein Vektorfeld ~V jedem Punkt des Raumes einenVektor zu. Beispiele für solche Felder sind:
f(x, y, z) = 2x2 − y3 + 4z und ~V (x, y, z) =
xy2
3z4y + z2
. (35)
2.7.1 Der Gradient eines Skalarfeldes
Wird der Nablaoperator auf ein skalares Feld f angewandt, so erhält mandessen Gradienten. Der Gradient eines Skalarfeldes f lautet formal in dreiRaumdimensionen:
gradf(x, y, z) = ~∇f(x, y, z) =
∂f∂x∂f∂y∂f∂z
. (36)
Er stellt an jedem Punkt des Raumes einen Vektor dar, der in die Richtungdes steilsten Anstieges des Skalarfeldes weist. Die Länge des Vektors ist gleichder Stärke dieses Anstieges.
Beispiel zum Gradienten eines Skalarfeldes: Aus Darstellungsgrün-den wird hier als Beispiel der zweidimensionale Fall betrachtet:
gradf(x, y) = ~∇f(x, y) =(∂f∂x∂f∂y
). (37)
Für das nachstehende Skalarfeld f(x, y) sieht der Gradient folgendermaßenaus:
f(x, y) = 12x
2 − 14y
2 + 4, gradf =(
x−1
2y
). (38)
Eine grafische Darstellung dieses Skalarfeldes und des zugehörigen Gradien-tenfeldes findet sich in Abb. 4 und 5. Die Farbskalierung in beiden Grafikenspiegelt die Größe der Funktionswerte des Skalarfeldes f wieder. In Abb.5 sind lediglich ausgewählte Vektoren des Vektorfeldes gradf eingezeichnet.An dieser Stelle sei angemerkt, dass der Gradient im Fall einer einzigenRaumdimension wieder der gewöhnlichen Ableitung aus den vorherigen Ab-schnitten dieses Skriptes entspricht.Für eine n-dimensionale Funktion f(x1, x2, . . . , xn) berechnet sich das zuge-
14

Abbildung 4: Skalarfeld f(x, y) aus Gleichung 38. Die z-Achse gibt den Funk-tionswert f(x, y) an.
-6
-4
-2
0
2
4
6
Y
-6 -4 -2 0 2 4 6
X
20
15
10
5
0
-5
Abbildung 5: Gradientenfeld gradf aus Gleichung 38 (weiße Pfeile) zugehörigzum Skalarfeld f aus Abb. 4 (Farbskalierung).
15

hörige Gradientenfeld folgendermaßen:
gradf(x1, x2, . . . , xn) = ~∇f(x1, x2, . . . , xn) =
∂∂x1∂∂x2...∂∂xn
f =
∂f∂x1∂f∂x2...∂f∂xn
. (39)
Wird nun n = 1 gesetzt, dann folgt:
gradf(x) = ~∇f(x) =(∂∂x
)f(x) =
(d
dx
)f(x) = df
dx. (40)
2.7.2 Die Divergenz eines Vektorfeldes
Die Divergenz eines Vektorfeldes ~V berechnet sich formal als das Skalarpro-dukt aus Nablaoperator und Vektorfeld:
div~V (x, y, z) = ~∇ · ~V =(∂∂x, ∂
∂y, ∂
∂z
)·
VxVyVz
= ∂Vx
∂x+ ∂Vy
∂y+ ∂Vz
∂z . (41)
Sie trifft Aussagen darüber, wie stark die Vektoren an einem Punkt des Vek-torfeldes auseinanderstreben.
Beispiel zur Divergenz eines Vektorfeldes: Aus Darstellungsgründenwird hier als Beispiel wieder der zweidimensionale Fall betrachtet.
div~V (x, y) = ~∇ · ~V (x, y) = ∂Vx
∂x+ ∂Vy
∂y . (42)
Für das nachstehende Vektorfeld ~V (x, y) berechnet sich die Divergenz fol-gendermaßen:
~V (x, y) =(√
xy
), div~V = 1
2√x
+ 1. (43)
Eine grafische Darstellung dieses Vektorfeldes und der zugehörigen Divergenzfindet sich in Abb. 6 und 7. Die Farbskalierung in beiden Grafiken spiegeltdie Größe der Funktionswerte des Skalarfeldes div~V wider. In Abb. 6 sindlediglich ausgewählte Vektoren des Vektorfeldes ~V eingezeichnet.
16

-6
-4
-2
0
2
4
6
Y
6543210
X
2.4
2.2
2.0
1.8
1.6
1.4
Abbildung 6: Vektorfeld ~V aus Gleichung 43 (weiße Pfeile) mit zugehörigerDivergenz div~V aus Abb. 7 (Farbskalierung).
Abbildung 7: Skalarfeld div~V aus Gleichung 43. Die z-Achse gibt den Funk-tionswert des Feldes an an.
17

2.7.3 Die Rotation eines Vektorfeldes
Die Rotation eines Vektorfeldes ergibt sich aus dem Kreuzprodukt von Nab-laoperator und Vektorfeld:
rot~V = ~∇× ~V =
∂∂x∂∂y∂∂z
×VxVyVz
=
∂Vz
∂y− ∂Vy
∂z∂Vx
∂z− ∂Vz
∂x∂Vy
∂x− ∂Vx
∂y
. (44)
Sie ist ein Maß für die Wirbel eines Vektorfeldes.
Beispiel zur Rotation eines Vektorfeldes: Ein Beispiel für die Berech-nung der Rotation eines Vektorfeldes ist hier gezeigt:
~V (x, y, z) =
y−x0
, rot~V =
0− 00− 0−1− 1
=
00−2
. (45)
Eine grafische Darstellung findet sich in den Abbildungen 8 und 9. Es wurdenwieder lediglich ausgewählte Vektoren der Vektorfelder eingezeichnet.
-6
-4
-2
0
2
4
6
Y
-6 -4 -2 0 2 4 6
X
Abbildung 8: Vektorfeld ~V aus Gleichung 45 (rote Pfeile).
18

-6
-4
-2
0
2
4
6
Y
-6 -4 -2 0 2 4 6
X
Abbildung 9: Rotation des Vektorfeldes ~V aus Gleichung 45 (rote Pfeile).
Der Laplaceoperator Das Skalarprodukt des Nablaoperators mit sichselbst ist der Laplaceoperator. Sein Symbol ist das auf einer Seite stehen-de Dreieck. Formal gibt er die Summe der zweiten Ableitungen des Feldesan, auf welches er angewandt wird:
∆ = ~∇ · ~∇ = ~∇2 = ∂2
∂x2 + ∂2
∂y2 + ∂2
∂z2 . (46)
Anwendung finden Nabla- und Laplaceoperator zum Beispiel in der Diffusi-onsgleichung und in Wellengleichungen.
Ausgewählte Rechenregeln:
div gradf = ∆fdiv rot~V = 0rot gradf = ~0.
(47)
19

3 Grundlagen der Integralrechnung
3.1 Motivation & HerleitungMit Hilfe von Integralen lassen sich Flächeninhalte unter Kurven berechnen.In Abbildung 10 ist eine Funktion f(x) gezeigt, unter welcher der Flächen-inhalt der blau gefärbten Fläche A berechnet werden soll.
4
3
2
1
0
f(x)
9876543210
x
A
Abbildung 10: Der Flächeninhalt der blau gefärbten FlächeA unter der Kurvef(x) =
√x soll berechnet werden.
Die Berechnung dieser Fläche ist allerdings schwierig, da sie auf einer Sei-te durch die Kurve f(x) begrenzt wird. Der Flächeninhalt kann aber nähe-rungsweise berechnet werden, indem die Fläche in gleichmäßig breite Streifengeteilt wird, deren Flächeninhalte dann aufsummiert werden. Das ist in Ab-bildung 11 dargestellt. Die Fläche wird in 5 rote Streifen aufgeteilt, sodassjeweils der obere rechte Eckpunkt eines Streifens auf der Kurve f(x) liegt.Die Summe der Flächeninhalte der dargestellten Streifen lässt sich folgender-maßen schreiben:
O(5) =5∑
n=1f(xn)(xn − xn−1). (48)
Dabei steht das O für Obersumme, weil alle Streifen über die Kurve nachoben hinausragen und die Summe der Flächeninhalte der Streifen größer ist,
20

4
3
2
1
0
f(x)
9876543210
xx0 x1 x2 x3 x4 x5
A
Abbildung 11: Streifenmethode zur näherungsweisen Bestimmung des Flä-cheninhaltes von A. Dargestellt ist hier die Obersumme.
als die eingezeichnete Fläche A. Allgemein schreibt man für die Obersummefür m Streifen:
O(m) =m∑n=1
f(xn)(xn − xn−1), m > n. (49)
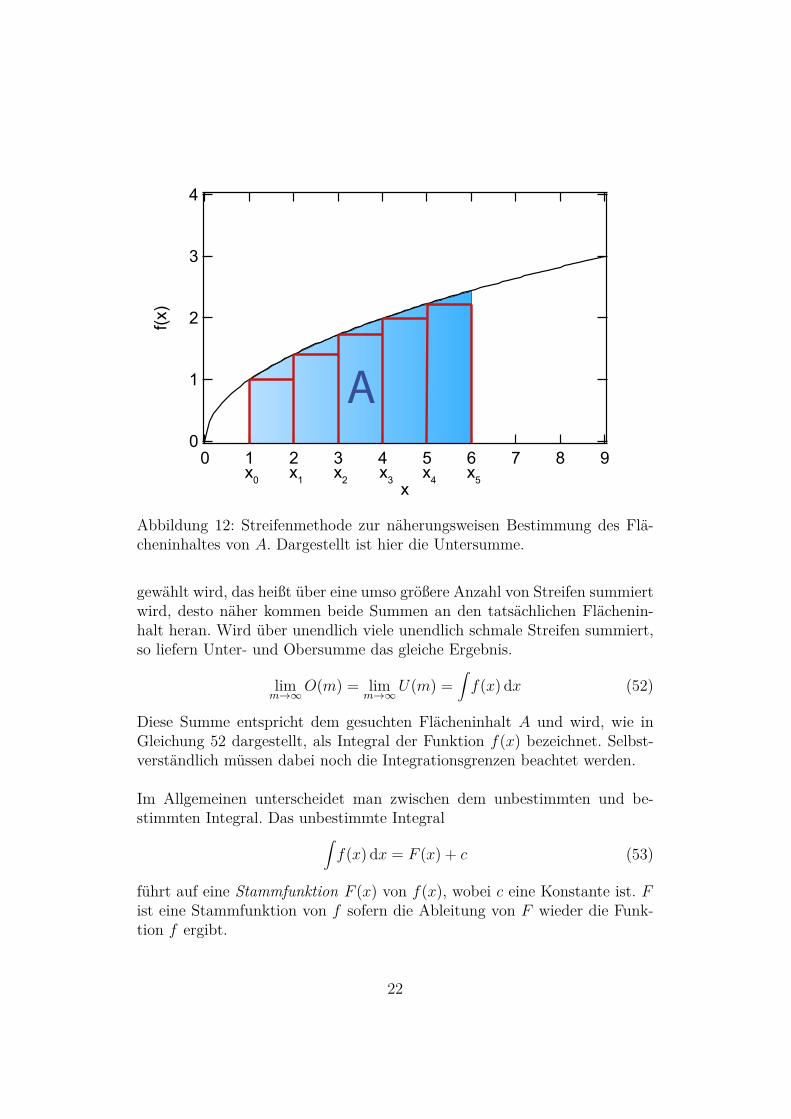
Wie in Abbildung 12 gezeigt, können die Streifen auch so eingezeichnet wer-den, dass jeweils ihre linke obere Ecke auf der Kurve f(x) liegt. Die Summeder Flächeninhalte dieser Streifen lässt sich dann folgendermaßen schreiben:
U(5) =5∑
n=1f(xn−1)(xn − xn−1). (50)
Hier steht das U für Untersumme. Sie ist kleiner als der Flächeninhalt derFläche A. Für m Streifen lautet die Untersumme:
U(m) =m∑n=1
f(xn−1)(xn − xn−1), m > n. (51)
Sowohl die Obersumme als auch die Untersumme liefern also das falsche Er-gebnis für den gesuchten Flächeninhalt. Je schmaler die Streifenbreite jedoch
21
4
3
2
1
0
f(x)
9876543210
xx0 x1 x2 x3 x4 x5
A
Abbildung 12: Streifenmethode zur näherungsweisen Bestimmung des Flä-cheninhaltes von A. Dargestellt ist hier die Untersumme.
gewählt wird, das heißt über eine umso größere Anzahl von Streifen summiertwird, desto näher kommen beide Summen an den tatsächlichen Flächenin-halt heran. Wird über unendlich viele unendlich schmale Streifen summiert,so liefern Unter- und Obersumme das gleiche Ergebnis.
limm→∞
O(m) = limm→∞
U(m) =∫f(x) dx (52)
Diese Summe entspricht dem gesuchten Flächeninhalt A und wird, wie inGleichung 52 dargestellt, als Integral der Funktion f(x) bezeichnet. Selbst-verständlich müssen dabei noch die Integrationsgrenzen beachtet werden.
Im Allgemeinen unterscheidet man zwischen dem unbestimmten und be-stimmten Integral. Das unbestimmte Integral∫
f(x) dx = F (x) + c (53)
führt auf eine Stammfunktion F (x) von f(x), wobei c eine Konstante ist. Fist eine Stammfunktion von f sofern die Ableitung von F wieder die Funk-tion f ergibt.
22

Das bestimmte Integral wird folgendermaßen geschrieben:b∫a
f(x) dx =[F (x)
]ba
= F (b)− F (a). (54)
f muss dabei eine stetige Funktion sein und F ist eine ihrer Stammfunktio-nen. Gleichung 54 wird auch Hauptsatz der Differenzial- und Integralrechnunggenannt. Dabei ist f(x) die erste Ableitung von F (x) nach x. Das Integrierenbildet also die Umkehroperation zum Ableiten einer Funktion.
Häufig treten die beiden folgenden Notationen für Integrale auf:∫f(x) dx =
∫dx f(x) . (55)
3.2 RechenregelnSeien f, u und v Funktionen, a, b, α und n konstante Zahlen, dann gilt:
• Potenzregel ∫xn dx = 1
n+ 1 xn+1 + c (56)
• Faktorregel ∫αf(x) dx = α
∫f(x) dx (57)
• Vorzeichenregelb∫a
f(x) dx = −a∫b
f(x) dx (58)
• Summenregel∫(u(x) + v(x)) dx =
∫u(x) dx+
∫v(x) dx (59)
• Partielle Integrationb∫a
u(x)v′(x) dx =[u(x)v(x)
]ba−
b∫a
u′(x)v(x) dx (60)
Ein Beispiel zur Rechenregel 60:∫x · sin(x) dx = −x · cos(x) +
∫1 · cos(x) dx (61)
= −x · cos(x) + sin(x) + c
23

3.3 Wichtige IntegraleDie folgenden Integrale treten häufig auf:∫
ex dx = ex + c∫ 1x
dx = ln|x|+ c∫cos(x) dx = sin(x) + c∫sin(x) dx = − cos(x) + c
(62)
3.4 MehrfachintegraleBisher haben wir uns in diesem Abschnitt mit der Berechnung von Integra-len in einer Raumdimension beschäftigt. Es ist darüber hinaus aber ebenfallsmöglich, Integrale in höheren Dimensionen zu berechnen. Ein solches Mehr-fachintegral sieht in einer allgemeinen Schreibweise zum Beispiel so aus:∫
Ω
f(~r) dΩ. (63)
Das Ω gibt dabei das Gebiet an, über welches integriert wird. Bei den Integra-len, welche wir bisher betrachtet haben, bestand dieses Gebiet eben einfachaus einem Abschnitt auf der x-Achse. Das dΩ am Ende des Integrals wardabei immer das dx.Häufig stellt das Gebiet Ω eine Fläche A dar. Dann bezeichnet man das In-tegral auch als Doppelintegral, denn es wird zweimal hintereinander überdie betreffende Funktion in verschiedenen Raumrichtungen integriert. Einemögliche Schreibweise ist:∫
A
f(~r) dA =∫∫A
f(x, y) dy dx =∫ (∫
f(x, y) dy)
dx. (64)
Diese Notation ist so zu verstehen, dass zuerst über die Funktion f(x, y)nach dy integriert wird. Das Ergebnis wid anschließend nach dx integriert.Im Allgemeinen arbeitet man sich bei Mehrfachintegralen vom inneren zumäußeren Integral vor und führt diese nacheinander aus.Ist ein bestimmtes Integral gesucht, das heißt sind Integrationsgrenzen an-gegeben, so müssen selbstverständlich wie in Gleichung 65 links dargestelltimmer die zur Integrationsvariablen passenden Grenzen verwendet werden.Auf der rechten Seite der Gleichung 65 ist noch eine weitere mögliche Nota-tion von Mehrfachintegralen dargestellt.
x1∫x0
y1∫y0
f(x, y) dy dx =y1∫y0
dyx1∫x0
dx f(x, y) (65)
24

Ein Beispiel für die Berechnung eines Mehrfachintegrals in zwei Dimensionenist hier dargestellt. Es wird zuerst von Innen nach Außen die Integration nachy ausgeführt und anschließend nach x integriert:∫
A
(−x2 − y2 + 2xy) dA =3∫
0
2∫0
(−x2 − y2 + 2xy) dy dx (66)
=3∫
0
[−x2y − 1
3y3 + xy2
]2
y=0dx
=3∫
0
[−2x2 − 8
3 + 4x]
dx
=[−2
3x3 − 8
3x+ 2x2]3
x=0dx
=[−18− 8 + 18− 0
]= −8.
Analog zum Flächenintegral wird das Volumenintegral definiert. Es wird dieselbe Notation genutzt mit dem Unterschied, dass das Volumenintegral einDreifachintegral ist und folglich über drei Dimensionen integriert werdenmuss. Es gelten weiterhin die gleichen Rechenregeln wie für alle Mehrfachin-tegrale. Statt des Ω steht nun ein V und aus dem dΩ wird ein dV :∫
V
f(~r) dV =∫∫∫V
f(x, y, z) dz dy dx =∫ (∫ (∫
f(x, y, z) dz)
dy)
dx (67)
x1∫x0
y1∫y0
z1∫z0
f(x, y, z) dz dy dx =z1∫z0
dzy1∫y0
dyx1∫x0
dx f(x, y, z). (68)
Polar-, Zylinder- & Kugelkoordinaten
Bisher haben wir hier immer mit kartesischen Koordinaten gearbeitet. Diex-, y- und z-Achse stehen dabei stets senkrecht aufeinander. Es gibt aberdarüber hinaus noch weitere Koordinatensysteme mit deren Hilfe man sichbeispielsweise die Berechnung von Kreisflächen und Kugelvolumina stark ver-einfachen kann.Als erstes werden wir und im Folgenden mit den Polarkoordinaten beschäfti-gen. Statt mit x und y wird mit den neuen Koordinaten r und φ gearbeitet.Die Transformation zwischen kartesischen und Polarkoordinaten sieht folgen-dermaßen aus: (
xy
)=(r cos(φ)r sin(φ)
), 0 ≤ r, 0 ≤ φ ≤ 2π (69)
25

Eine graphische Darstellung dieses Koordinatensystems ist in Abbildung 13gezeigt. Die Koordinate r spielt die Rolle des Radius und φ ist ein Winkel.
y
x
rφ
Abbildung 13: Beziehung zwischen den Polarkoordinaten r und φ und karte-sischen Koordinaten x und y.
Aus dA = dy dx bei den kartesischen Koordinaten wird nun dA = rdr dφ.Das in dA auftauchende r hängt von der speziell gewählten Koordinaten-transformation ab. Genauer gesagt entspricht dieser Faktor der Determinan-te der Transformationsmatrix. Das ist hier aber nicht weiter von Bedeutung.Wichtig ist nur, dass das dA in der oben angegebenen Form eingesetzt wird.
Im folgenden Beispiel wird der Flächeninhalt eines Kreises mit dem Radi-us R berechnet:
AKreis =∫∫A
dA =∫ 2π
0
∫ R
0r dr dφ (70)
=∫ 2π
0
[12r
2]Rr=0
dφ
=∫ 2π
0
12R
2 dφ
= 12R
2[φ]2π
φ=0
= πR2.
26

Die Polarkoordinaten können um die z-Dimension zu den Zylinderkoordina-ten erweitert werden. Die Transformation sieht folgendermaßen aus:xy
z
=
r cos(φ)r sin(φ)
z
, 0 ≤ r, 0 ≤ φ ≤ 2π, z ∈ R. (71)
Eine anschauliche Darstellung ist in Abbildung 14 gezeigt. Das Flächenele-ment dA sieht dadurch, dass nur die dritte Koordinate weggelassen wird, indiesem Koordinatensystem noch genauso aus wie in den PolarkoordinatendA = rdr dφ. Für die Zylinderkoordinaten lässt sich aber auch das Volumen-element dV = rdr dφ dz angeben.
x
y
z
rφ
z
Abbildung 14: Beziehung zwischen den Zylinderkoordinaten r, φ und z undkartesischen Koordinaten x, y und z.
Im folgenden Beispiel wird das Volumen eines Zylinders mit Radius R undHöhe H berechnet:
VZylinder =∫∫∫V
dV =∫ H
0
∫ 2π
0
∫ R
0r dr dφ dz (72)
=∫ H
0
∫ 2π
0
[12r
2]Rr=0
dφ dz
=∫ H
0
12R
2[φ]2π
φ=0dz
= 12R
22π[z]Hz=0
= πR2H.
27

Als letztes sollen hier noch die Kugelkoordinaten vorgestellt werden. Diesebestehen aus einem Radius r und zwei Winkeln θ und φ. Eine anschaulicheDarstellung ist in Abbildung 15 gezeigt.
x
y
z
r
φ
Θ
Abbildung 15: Beziehung zwischen den Kugelkoordinaten r, θ und φ undkartesischen Koordinaten x, y und z.
Eine Möglichkeit die Koordinatentransformation zwischen kartesischen undKugelkoordinaten anzugeben ist:xy
z
=
r sin(θ) sin(φ)r sin(θ) cos(φ)
r cos(θ)
, 0 ≤ r, 0 ≤ φ ≤ 2π, 0 ≤ θ ≤ π. (73)
Das Volumenelement ist hierbei dV = r2 sin(θ) dr dθ dφ. Anschaulich ent-spricht das einem kleinen Stück aus einer Kugelschale. Als Beispiel ist hierdie Berechnung des Volumens einer Kugel mit Radius R gezeigt:
VKugel =∫∫∫V
dV =∫ 2π
0
∫ π
0
∫ R
0r2 sin(θ) dr dθ dφ (74)
=∫ 2π
0
∫ π
0
[13r
3]Rr=0
sin(θ) dθ dφ
=∫ 2π
0
13R
3[− cos(θ)
]πθ=0
dφ
= 23R
3[φ]2π
φ=0
= 43πR
3.
28

3.5 LinienintegraleBisher haben wir in den vorigen Abschnitten immer nur Integrale unter Kur-ven berechnet. Es ist darüber hinaus aber auch möglich, Integrale entlangeiner gegebenen Kurve zu berechnen. Diese Art von Integralen nennt manLinien- oder auch Wegintegrale.
Linienintegral 1. Art
Im Allgemeinen lässt sich ein solches Integral für die skalare Funktion f(~r)folgendermaßen schreiben: ∫
C
f(~r) ds. (75)
Dabei bezeichnet C ähnlich wie zuvor Ω das Gebiet, auf welchem integriertwerden soll. In diesem Fall ist das ein Kurvenstück. Das auftauchende dssteht anstatt des früheren dx für ein infinitesimales Wegstück. In Abbildung16 ist eine anschauliche Darstellung des Linienintegrals gezeigt.
15
10
5
0
-5
-10
y
420-2-4
x
Δx
ΔyΔs
t=a
t=b
Abbildung 16: Darstellung des Zusammenhanges zwischen Linienintegral, Pa-rametrisierungsvariable t und Wegelement ∆s.
Um ein Integral über eine Funktion f(~r) entlang einer Kurve C zu berechnen,
29

muss diese Kurve zuerst parametrisiert werden. Das heißt der Weg entlangdessen integriert wird muss in Abhängigkeit einer Laufvariable (meistens t)dargestellt werden. Diese Parametrisierung wird häufig mit γ(t) bezeichnetund folgendermaßen aufgeschrieben:
γ(t) =(x(t)y(t)
), t ∈ [a, b]. (76)
Dabei besteht jeder Punkt des Weges aus einer x- und aus einer y-Koordinate.Die Laufvariable t läuft in einem festgelegten Intervall [a, b] wobei jeder Punktder Kurve genau einmal erreicht wird. Eine solche Kurvenparametrisierungist nicht eindeutig, das heißt es können zu einer bestimmten Kurve verschie-dene mögliche Parametrisierungen gewählt werden. Wichtig ist dabei, dassjeder Punkt des Weges genau einmal vorkommt.
Zur Berechnung des Wegintegrals ist es nötig, das Wegelement ∆s mit Hilfeder gewählten Parametrisierung zu ersetzen. Nach dem Satz des Pythagorasist:
∆s =√
∆x2 + ∆y2. (77)
Werden alle Wegelemente mit der Laufvariable t skaliert, so erhält man:
∆s∆t =
√(∆x∆t
)2+(∆y
∆t
)2. (78)
Für den Übergang von ∆t nach dt entspricht das jeweils der Ableitung nachder Laufvariable t. Für gewöhnlich werden Ableitungen nach der Variable t(meistens die Zeit) mit einem Punkt über der abzuleitenden Größe abgekürzt.Man schreibt:
ds =√x(t)2 + y(t)2 dt =
∣∣∣∣∣(x(t)y(t)
)∣∣∣∣∣ dt, (79)
wobei die Wurzel auf der linken Seite gerade dem Betrag des Vektors aus x(t)und y(t) entspricht. Dieser Vektor ist die Ableitung der Parametrisierung γ(t)nach t:
γ(t) =(x(t)y(t)
), γ(t) =
(x(t)y(t)
). (80)
Mit Gleichung 79 und 80 lässt sich nun ds in Gleichung 75 ersetzen und manerhält:
∫C
f ds =b∫a
f(γ(t))∣∣∣γ(t)
∣∣∣ dt, t ∈ [a, b]. (81)
30

Diese Formel kann nun zur Lösung eines Linienintegrals mit der gewähltenParametrisierung genutzt werden. Wichtig ist dabei, dass die Parametrisie-rung auch in die gegebene Funktion f(~r) eingesetzt wird.Als Beispiel dient hier die Berechnung des Umfangs eines Kreises mit Radiusgleich R. Als Parametrisierung wird gewählt:
γ(t) =(R cos(t)R sin(t)
), γ(t) =
(−R sin(t)R cos(t)
), t ∈ [0, 2π]. (82)
Eine Veranschaulichung findet sich in Abb. 17. Die Parametrisierung wird inGleichung 81 eingesetzt, wobei über eine Eins statt einer Funktion f integriertwird:
UKreis =∫C
ds =∫C
∣∣∣γ(t)∣∣∣ dt (83)
=∫ 2π
0
√R2 sin(t)2 +R2 cos(t)2 dt
=∫ 2π
0R dt
= R ·[t]2π
t=0= 2πR.
Integriert man über eine geschlossene Kurve, das heißt Endpunkt = An-fangspunkt, wie beispielsweise in (84), so schreibt man auch
∮C fds. Integriert
man über ein totales Differenzial, so hängt das Integral nur von den Anfangs-und Endpunkten ab. Ähnlich wie bei
∫df = f hat man für eine Kurve mit
Anfangspunkt tA und Endpunkt tB (für ein totales Differenzial!)∫ tB
tAdf = f [x(tB), y(tB)]− f [x(tA), y(tA)] (84)
und der genaue Weg über welchen man integriert ist nicht relevant. Insbe-sondere ist für eine geschlossene Kurve tA = tB und damit∮
Cdf = 0 (85)
Solche Ausdrücke kommen häufig in der Thermodynamik vor. Da die Dif-ferenziale von Zustandsfunktionen totale Differenziale sind ist beispielsweise∮C dU = 0.
31

y
x
R
t = π
t
t = 0
t =3π
2
t =π
2γ (t) =
01
γ (t) =10
γ (t) =− 10
γ (t) =0− 1
Abbildung 17: Veranschaulichung der in 82 angegebenen Parametrisierungeiner Kreislinie.
4 DifferenzialgleichungenGleichungen von Funktionen (mehrerer Veränderlicher) in denen auch Ablei-tungen der Funktion auftauchen, bezeichnet man als Differenzialgleichungen.Sie beschreiben das Änderungsverhalten dieser Größen zueinander. Differen-zialgleichungen können zum Beispiel folgendermaßen aussehen:
y′′ − 4y′ − 5y = 0Uxx + Uyy = −1
y′ = 1y2
Differenzialgleichungen lassen sich oft nur numerisch lösen. Das gewählte Lö-sungsverfahren hängt vom Typ der Differenzialgleichung ab. So unterschei-det man beispielsweise zwischen gewöhnlichen und partiellen Differenzialglei-chungen. Bei ersteren hängt die gesuchte Funktion lediglich von einer einzigenVariable ab. Als linear bezeichnet man eine Differenzialgleichung, sofern dieFunktion und ihre Ableitungen allein linear auftauchen. Des weiteren unter-scheidet man zwischen homogenen und inhomogenen Differenzialgleichungen.Bei homogenen Gleichungen gilt: Ist bereits eine Lösung der Differenzialglei-chung gefunden, dann erhält man weitere Lösungen indem die erste mit einer
32

reellen Zahl multipliziert wird. Bei inhomogenen Differenzialgleichungen istdas nicht möglich. Die Ordnung einer Differenzialgleichung gibt die höchsteauftretende Ableitung an.
An dieser Stelle soll nun nur eins der vielfältigen Lösungsverfahren für Diffe-renzialgleichungen vorgestellt werden. Dieser Ansatz wird als Trennung derVariablen bezeichnet. Es wird für Differenzialgleichungen vom Typ:
y′ = dydx = h(x) · g(y), y = y(x), g(y) 6= 0. (86)
verwendet. Nun werden alle Teile der Gleichung, welche von y abhängen aufdie linke Seite und alle Teile, welche explizit von x abhängen, auf die rechteSeite gebracht:
1g(y) dy = h(x) dx. (87)
Darüber wird nun integriert:∫ 1g(y) dy =
∫h(x) dx. (88)
Man erhält die jeweiligen Stammfunktionen:
G(y) + c1 = H(x) + c2. (89)
Durch Zusammenfassen der beiden Konstanten c1 und c2 zu einer neuenKonstante c entsteht:
G(y) = H(x) + c. (90)
Diese Konstante muss nun noch abschließend aus den Anfangsbedingungeny0 = y(x0) bestimmt werden. Als Anwendungsbeispiel soll hier die Reakti-onsgeschwindigkeit der folgenden chemischen Reaktion berechnet werden:
A→ B + C (91)
Es ist die Konzentration von Stoff A als Funktion der verstrichenen Zeit tgesucht. Als Anfangsbedingung wählen wir [A](t = 0) = [A]0. Dazu wird diefolgende Differenzialgleichung für die Konzentration [A] aufgestellt:
v = −d[A]dt = k[A]. (92)
33

Wir nutzen das Lösungsverfahren Trennung der Variablen und bringen Glei-chung 92 auf die Form 87:
−d[A][A] = kdt. (93)
Es wird auf beiden Seiten integriert:
−∫ 1
[A] d[A] = k∫
dt (94)
und man erhält die Stammfunktionen und Konstanten c1 und c2
− ln∣∣∣[A]
∣∣∣+ c1 = kt+ c2. (95)
Die Konstanten werden wieder zu einer neuen Konstante c3 zusammengefasst:
ln∣∣∣[A]
∣∣∣ = −kt+ c3. (96)
Der Logarithmus wird durch Anwendung der e-Funktion eliminiert:
[A] = e−kt+c3 . (97)
Nun wird c3 noch mit Hilfe weiterer Potenzgesetze durch die neue Konstantec ausgetauscht:
[A] = c · e−kt. (98)
Aus der Anfangsbedingung erhalten wir:
[A]0 = [A](t = 0) = c · e−k·0 = c · 1 = c. (99)
Es folgt also als Endergebnis:
[A] = [A]0 · e−kt. (100)
Diese Gleichung gibt nun an, wie sich die Konzentration des Stoffes A imLaufe der Zeit, in welcher die chemische Reaktion abläuft, ändert.
34

35

5 Komplexe ZahlenWenn in der Mathematik eine Gleichung scheinbar unlösbar ist oder ein ma-thematischer Ausdruck keinen Sinn ergibt, dann besteht die Lösung des Pro-blems oft darin, einen neuen Zahlbereich zu definieren. So ist zum Beispieldie Aufgabe
5− 8 = x (101)
im Bereich der natürlichen Zahlen N nicht lösbar. Wir wissen selbstverständ-lich das die Lösung x = −3 lautet. Allerdings existieren negative Zahlen imBereich der natürlichen Zahlen nicht. Deshalb müssen diese um den Bereichder negativen Zahlen zu den ganzen Zahlen Z ergänzt werden. Dann kannist die Gleichung 101 nach x aufgelöst werden.
Ähnlich verhält es sich mit der Wurzel aus negativen Zahlen:
x =√−1. (102)
Diese Gleichung ist in dem bisher bekannten Zahlbereich R der reellen Zahlennicht lösbar. Zur Lösung erweitert man die reellen Zahlen zu den komplexenZahlen C und definiert dabei die imaginäre Einheit i als
i2 = −1. (103)
Die reelle Zahlenachse wird um die imaginäre Achse zur komplexen Zahlene-bene erweitert. Eine anschauliche Darstellung ist in Abbildung 18 gezeigt.
Eine komplexe Zahl z lässt sich nun folgendermaßen schreiben:
z = a+ ib. (104)
Dabei bezeichnet man a als Realteil und b als Imaginärteil von z.
a = <(z) b = =(z) (105)
Eine weitere Möglichkeit eine komplexe Zahl darzustellen ist die auf der eu-lerschen Relation beruhenden Polarform:
z = reiϕ = r(cosϕ+ i sinϕ). (106)
Dabei sind r und ϕ die bereits in diesem Skript in Abschnitt 3.4 vorgestelltenPolarkoordinaten und es gilt:
a = r cosϕ b = r sinϕ. (107)
Seien z1 = a+ ib und z2 = c+ id komplexe Zahlen, dann gilt:
36

Im(z)
Re(z)
r
ϕ
1-1
i
-i
b
a
z = a+ib
Abbildung 18: Darstellung der komplexen Zahlenebene
• Addition
z1 + z2 = (a+ ib) + (c+ id) = (a+ c) + i(b+ d) (108)
• Multiplikation
z1z2 = (a+ ib)(c+ id) = (ac− bd) + i(ad+ bc) (109)
• Betrag einer komplexen Zahl
r = |z| =√a2 + b2 (110)
• Komplex Konjugierte z
z = a+ ib z = a− ib (111)
37

6 FehlerrechnungBei einer Messung der Messgröße X unterliegt der bestimmte Messwert ximmer einem Fehler. Das heißt, dass der Messwert x immer vom „wah-ren Wert“ µ (Erwartungswert) abweicht. Deshalb muss in der Auswertungfür jedes Experiment die Messabweichung u zusammen mit dem erhaltenenMesswert angegeben werden, sodass der Erwartungswert in dem Intervall[x− u, x+ u] liegt. Zum besseren Verständnis ist das in Abbildung 19 darge-stellt.
x μx+ux-u
Messgröße X
Abbildung 19: Der tatsächliche Wert µ liegt im Intervall [x − u, x + u] umden gemessenen Wert x der Messgröße X. u bezeichnet dabei die Messunsi-cherheit.
Bei der Ermittlung der Messunsicherheit u unterscheidet man zwischen syste-matischen usys(X) und zufälligen Fehlern uzuf(X). Die zufälligen Messabwei-chungen lassen sich mit Hilfe der Statistik und Wahrscheinlichkeitsrechnungmathematisch beschreiben. Zu ihnen zählen beispielsweise Ablesefehler, diedazu führen, dass bei Wiederholung des Experimentes immer wieder verschie-dene Messwerte x abgelesen werden, die um den Erwartungswert streuen.Diese statistischen Fehler lassen sich beim Experimentieren nicht vermeiden.
Im Gegenzug dazu werden bekannte systematische Messabweichungen im-mer korrigiert. Zu dieser Fehlerklasse gehören zum Beispiel die Kalibrierungder Messgeräte, fehlerhafte Nullpunkteinstellung oder vereinfachende Annah-men für die Berechnungsgleichungen. Prinzipiell können die systematischenFehler mit gesteigertem finanziellen und technischen Aufwand vermieden wer-den. Gerätehersteller geben allerdings für gewöhnlich im Produktdatenblattoder Handbuch einen maximalen systematischen Fehler des Messgerätes an.Dieser ist dann für die Auswertung des Experimentes zu nutzen.
38

Größtfehlerabschätzung
Bei jeder Messung sollte eine Größtfehlerabschätzung durchgeführt werden.Das bedeutet, dass die größtmögliche Messunsicherheit, die unter den un-günstigsten Umständen zustande kommt, abgeschätzt werden muss. Sofernder Messwert x der Messgröße X nur ein einziges Mal ermittelt wurde, dannerfolgt die Abschätzung des Größtfehlers folgendermaßen:
umax = usys + uzuf. (112)
SindX1, X2, . . . , Xn eine Reihe direkter Messgrößen mit zugehörigen Messun-sicherheiten u(X1), u(X2), . . . , u(Xn) und bezeichnet Y = Y (X1, X2, . . . , Xn)eine indirekte Messgröße, die von den Größen X1, X2, . . . , Xn abhängt, dannmuss bei der Größtfehlerabschätzung bezüglich der Größe Y eine Fehlerfort-pflanzung betrachtet werden. Dies erfordert eine Taylorentwicklung unter derVoraussetzung, dass die relativen Fehler von allen Größen Xi klein sind. Dasheißt es muss gelten:
u(Xi)|Xi|
1. (113)
Die Größtfehlerabschätzung für Y lässt sich dann schreiben als:
umax(Y ) =∣∣∣∣∣ ∂Y∂X1
∣∣∣∣∣u(X1) + · · ·+∣∣∣∣∣ ∂Y∂Xn
∣∣∣∣∣u(Xn) =n∑i=1
∣∣∣∣∣ ∂Y∂Xi
∣∣∣∣∣u(Xi). (114)
Als Beispiel soll hier die Berechnung der DissoziationskonstanteKD für schwa-che Elektrolyte aus Ausgangskonzentration c0, Äquivalentleitfähigkeit Λ undGrenzleitfähigkeit Λ∞ dienen. Es gilt:
KD = c0 · Λ2
(Λ∞ − Λ) · Λ∞. (115)
Der Größtfehler für die Dissoziationskonstante KD berechnet sich nun als:
umax(KD) =∣∣∣∣∣∂KD
∂c0
∣∣∣∣∣u(c0) +∣∣∣∣∣∂KD
∂Λ
∣∣∣∣∣u(Λ) +∣∣∣∣∣∂KD
∂Λ∞
∣∣∣∣∣u(Λ∞) (116)
=∣∣∣∣∣ Λ2
(Λ∞ − Λ)Λ∞
∣∣∣∣∣u(c0) +∣∣∣∣∣c0Λ(2Λ∞ − Λ)Λ∞(Λ∞ − Λ)2
∣∣∣∣∣u(Λ)
+∣∣∣∣∣−c0Λ2(2Λ∞ − Λ)
Λ2∞(Λ∞ − Λ)2
∣∣∣∣∣u(Λ∞).
39

Statistische Fehlertheorie
Die statistische Fehlertheorie kann nur für Messungen angewendet werden,für welche die folgenden Voraussetzungen gelten:
• Die Messgröße X kann beliebig oft unter den gleichen experimentellenBedingungen ermittelt werden.
• Die auftretenden systematischen Fehler können entweder korrigiert odervernachlässigt werden.
• Die ermittelten Messwerte x streuen zufällig um den Erwartungswert µ.
Unter der Voraussetzung einer genügend langen Messreihe ist das arithmeti-sche Mittel x von den Messwerten x1, x2, . . . , xn die beste Schätzung für denwahren Wert µ:
x = 1n
n∑i=1
xi. (117)
Die Varianz V gibt die Stärke der Streuung der Messwerte xi um den Mit-telwert x an:
VX = 1n− 1
n∑i=1
(xi − x)2. (118)
Die Standartabweichung σX ist ein experimentelles Maß für statistische Mess-abweichungen und wird aus der Quaratwurzel der Varianz gebildet.
σX =√VX =
√√√√ 1n− 1
n∑i=1
(xi − x)2. (119)
Sie beschreibt die Genauigkeit einer Einzelmessung der Messreihe. Im Prinzipist sie unabhängig von der Anzahl der Einzelmessungen. Unter der Annahme,dass die Messwerte normalverteilt sind, lassen sich sogenannte Konfidenzin-tervalle angeben. Dieser Zusammenhang ist in Abbildung 20 dargestellt. DerFlächeninhalt unter der Dichtefunktion gibt die Wahrscheinlichkeit an, einenMesswert innerhalb dieses Intervalls zu finden. Integriert man über die ge-samte x-Achse von −∞ bis∞ so erhält man demnach den Wert 1 bzw. 100 %.So beträgt die Wahrscheinlichkeit, einen Messwert innerhalb des Intervallsder einfachen Standartabweichung zu finden beispielsweise 68.3 %. Im Inter-vall [x− 2σ, x+ 2σ] sind es bereits 95.45 %.
40

f(x)
xμ μ+σ μ+2σ μ+3σμ−σμ−2σμ−3σ
68.3%95.45%99.7%
Abbildung 20: Dichtefunktion f(x) der Normalverteilung. Die Fläche unterder Kurve gibt die Wahrscheinlichkeit an, eine Einzelmessung im betreffendenIntervall zu finden. σ bezeichnet die Standardabweichung.
Zur Beurteilung des Fehlers des Mittelwertes wird die Standardabweichungdes Mittelwertes σX berechnet:
σX = σX√n
=√√√√ 1n(n− 1)
n∑i=1
(xi − x)2. (120)
Da das arithmetische Mittel als beste Schätzung für den Erwartungswertder Messgröße X herangezogen wird, gibt die Standardabweichung des Mit-telwertes den Fehler des Messergebnisses an. Sie hängt im Gegensatz zureinfachen Standardabweichung von der Anzahl der durchgeführten Messun-gen ab. Somit geht die Standardabweichung des Mittelwertes σX gegen nullfür n gegen unendlich.
41





























