Embed Size (px)
Citation preview

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
1
• Blok Diyagramlar • Geribeslemeli Sistemlerin Analizi ve Tasarımı • İşaret Akış Diyagramları • Mason Kuralı • Durum Denklemlerinin İşaret Akış Diyagramları • Durum Uzayında Alternatif Gösterimler

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
2
Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli “altsistem”ler içerir. Dolayısıyla tüm sistemin blok diyagramı, her bir alt sistemi temsil eden blokların kompozisyonundan oluşur. Karmaşık sistemlerde, sistemi temsil eden blok diyagram da karmaşıklaşır ve sistem genel transfer fonksiyonunu elde etmek için bir takım manipülasyon ve işlemlere ihtiyaç duyulur.
Bugün ağırlıklı olarak bu karmaşık blok diyagramların sadeleştirilmesi konusundan bahsedeceğiz. Bunun için önce blok diyagramların temellerinden başlayalım.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
3
Her bir altsistem bir blok ile temsil edilir ve bu bloğun bir girişi, bir çıkışı ve bir de transfer fonksiyonu vardır. Çok sayıda altsistem birbirine bağlandığında, genel sistemin blok diyagramına birkaç yeni bileşen eklenir: Bu yeni bileşenler “toplama noktları” ve “dağılma noktaları”dır.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
4
Şimdi blok diyagramlardaki temel bazı topolojilere bakalım: Kaskat Form:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
5
Paralel Form:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
6
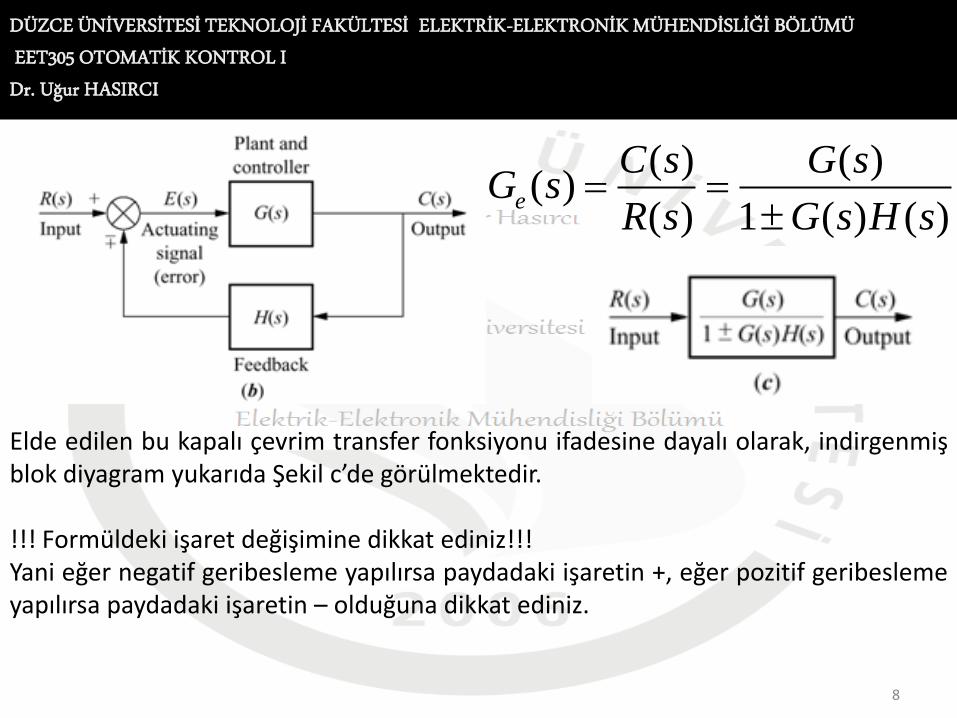
Geribesleme Formu: Sistem mühendisliğine temel teşkil eden formdur. İlk derste “açık çevrim” ve “kapalı çevrim” kavramlarını tanıtmıştık. Dersin geri kalanının önemli bir kısmında bu geribeslemeli sistemlerin analizini ve tasarımını yapacağız. Tipik bir geribeslemeli sistem, aşağıda Şekil a’da görülmektedir. Bu sistemin basitleştirilmiş ve yaygın olarak kullanılan hali ise Şekil b’de görülmektedir. Şimdi Şekil b’deki basitleştirilmiş blok diyagrama odaklanıp, geri beslemeli sistemin transfer fonksiyonunu türetelim.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
7
( ) ( ) ( ) ( )E s R s C s H s
Bu sistemin girişi ile çıkışı arasındaki transfer fonksiyonunu türetelim. Hata denklemini yazmakla başlayalım:
Burada olduğundan, ( ) ( ) ( )C s E s G s
( ) ( ) / ( )E s C s G s ifadesi ilk denklemde
yerine yazılıp, bu ilk denklem, kapalı
( ) / ( )C s R sçevrim transfer fonksiyonunu elde etmek amacıyla için çözülürse, bundan sonra sıkça karşılaşacağımız ve kapalı çevrim sistemlerin transfer fonksiyonunu ifade eden aşağıdaki denklem elde edilir:
( ) ( )( )
( ) 1 ( ) ( )e
C s G sG s
R s G s H s
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
8
( ) ( )( )
( ) 1 ( ) ( )e
C s G sG s
R s G s H s
Elde edilen bu kapalı çevrim transfer fonksiyonu ifadesine dayalı olarak, indirgenmiş blok diyagram yukarıda Şekil c’de görülmektedir. !!! Formüldeki işaret değişimine dikkat ediniz!!! Yani eğer negatif geribesleme yapılırsa paydadaki işaretin +, eğer pozitif geribesleme yapılırsa paydadaki işaretin – olduğuna dikkat ediniz.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
9
Gerekli olduğu durumlarda, takip eden birkaç slaytta görüldüğü gibi, kimi zaman sistemin analizini basitleştirmek kimi zaman da daha aşina olunan formlar oluşturmak üzere blok diyagramlar manipüle edilebilirler. Ancak blokların manipüle edilmesi genellikle ilkel bir yöntem olarak addedilir ve bunun yerine kapalı çevrim sistemin blok diyagramını hesaplamak için ileride göreceğimiz işaret akış diyagramları kullanılır. Şimdi blokların manipüle edilmesi ve indirgenmesi üzerine birkaç örnek verelim:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
10

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
11

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
12

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
13
• Blok Diyagramlar • Geribeslemeli Sistemlerin Analizi ve Tasarımı • İşaret Akış Diyagramları • Mason Kuralı • Durum Denklemlerinin İşaret Akış Diyagramları • Durum Uzayında Alternatif Gösterimler

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
14
Az önce kapalı çevrim sistemlerin “kapalı çevrim transfer fonksiyonu”nu elde ettik. Elde ettiğimiz bu transfer fonksiyonu formülasyonu kullanılarak, ikinci mertebeden bir sistemin geçici durum cevabının analizi yapılabilir ve ayrıca sistemin önceden belirlenmiş bazı geçici durum spesifikasyonlarını sağlaması için kontrol kazancının değeri de tasarlanabilir. Örneğin aşağıdaki blok diyagramı düşünelim. Bu blok diyagram, bir uydu anteninin azimuth eksenindeki konum kontrolü yapan kapalı çevrim kontrol sistemine ilişkin blok diyagramdır. Buradaki K kazancı, sistemin istenen performans kriterlerini sağlaması için değeri tasarlanacak olan kontrol kazancıdır.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
15
Transfer fonksiyonu K/[s(s+a)] olarak verilen blok; yükseltecin (K), yükün (anten), yükü süren motorun (DC motor) ve dişlinin modelini içerir. Bu sistemin kapalı çevrim blok diyagramını bulalım:
2
( )( ) , ( ) ( ) 1
1 ( ) ( ) ( )
( )
G s KT s G s H s
G s H s s s a
KT s
s as K

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
16
Dikkat edilirse burada, yükseltecin kazancı olan K değiştikçe, kapalı çevrim sistemin kutupları da değişecektir. Dolayısıyla sistemin geçici durum cevabı da değişecektir. Yani K’nın değerine göre sistem aşırı sönümlü, kritik sönümlü ya da düşük sönümlü olabilir. Dolayısıyla verilen bir K değeri için sistemin geçici durum performans spesifikasyonlarının (yükselme zamanı, yüzde aşım, yerleşme zamanı, tepe zamanı) değeri bulunabilir (analiz), ya da bunun tam tersi yani bu performans spesifikasyonlarının belirli bazı değerler almasını sağlayacak K değeri bulunabilir (tasarım). Şimdi bir analiz ve bir tasarım örneği yapalım.
2( )
KT s
s as K

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
17
Ör: Blok diyagramı aşağıdaki gibi olan sistemin tepe zamanı, yüzde aşım ve yerleşme zamanı değerlerini bulunuz. C: Kapalı çevrim transfer fonksiyonu: Buna göre;
2
25( )
5 25T s
s s
2 25 5 rad/snn n
2 5 0.5n
2/ 1
2
40.726 sn, 1.6 sn, % 100 16.303
1p s
nn
T T OS e

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
18
Ör: Aşağıda verilen sistemde yüzde aşımın %10 olmasını sağlayacak K değerini bulunuz. C: Kapalı çevrim transfer fonksiyonu:
2( )
5
KT s
s s K
2 rad/snn nK K
52 5
2n
K
%10 aşım değerine karşılık gelen sönüm oranı değeri ζ=0.591 dir. Bu değer, için yukarıda elde edilen formülde yerine konulursa, K=17.9 bulunur. Yani yükseltecin kazancı 17.9 olmalıdır.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
19
• Blok Diyagramlar • Geribeslemeli Sistemlerin Analizi ve Tasarımı • İşaret Akış Diyagramları • Mason Kuralı • Durum Denklemlerinin İşaret Akış Diyagramları • Durum Uzayında Alternatif Gösterimler

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
20
İşaret Akış Diyagramları, blok diyagramların bir alternatifidir. İşaret akış diyagramlarında her bir sistem bir “dal” ile (Şekil a), her bir sinyal ise bir “düğüm” ile (Şekil b) ifade edilir.
Aşağıdaki şekilde ve takip eden şekillerde, sırasıyla kaskat form, paralel form ve geribesleme formuna ilişkin blok diyagramlar ve işaret akış diyagramları karşılaştırmalı olarak görülmektedir.
X2(s) X1(s)

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
21
X1(s)
X3(s)
X2(s)

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
22
X1(s)
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
23
• Blok Diyagramlar • Geribeslemeli Sistemlerin Analizi ve Tasarımı • İşaret Akış Diyagramları • Mason Kuralı • Durum Denklemlerinin İşaret Akış Diyagramları • Durum Uzayında Alternatif Gösterimler

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
24
Bu dersin başlarında, karmaşık blok diyagramların, sistemin girişi ile çıkışı arasında tek bir transfer fonksiyonu elde etmek için nasıl tek bir bloğa indirgenebileceğini tartıştık. Şimdi bir sistemin girişi ile çıkışı arasında tek bir transfer fonksiyonu yazmak için alternatif bir yöntemden bahsedeceğiz. 1953 yılında J. S. Mason, sistem modellerinin işaret akış diyagramlarıyla ifade edildikten sonra sistemin transfer fonksiyonunun hesaplanması için bir formülasyon önermiştir. Sistem türüne göre değişmekle beraber, bazı sistemlerde transfer fonksiyonunun bulunması için Mason Kuralı daha az işlem yükü gerektirir. Ancak bazı sistemlerde hata riskini artırır ve transfer fonksiyonunun bulunmasını zorlaştırabilir. Mason Kuralı’na ilişkin formülasyon tanıtılmadan önce, bu formülasyonda sıkça kullanılan birkaç kavramın tanımını yapalım:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
25
Döngü: Bir düğümden başlayıp, her düğümü yalnız bir kez geçerek yine aynı düğümde sonlanan yol. Örneğin aşağıdaki işaret akış diyagramında döngüleri bulalım: Bu diyagramda toplam 4 tane döngü vardır.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
26
Döngü Kazancı: Bir döngüdeki tüm dal kazançlarının çarpımı. Örneğin aşağıdaki işaret akış diyagramında döngü kazançlarını bulalım:
2 1
4 2
4 5 3
4 6 3
1. ( ) ( )
2. ( ) ( )
3. ( ) ( ) ( )
4. ( ) ( ) ( )
G s H s
G s H s
G s G s H s
G s G s H s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
27
İleri Yol: Bir giriş düğümünden başlayıp, işaret akış yönünde süren ve bir çıkış düğümünde son bulan yoldur. Örneğin aşağıdaki işaret akış diyagramında iki adet ileri yol vardır:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
28
İleri Yol Kazancı: Bir İleri Yol’a ilişkin dalların kazançlarının çarpımıdır. Örneğin aşağıdaki işaret akış diyagramındaki ileri yol kazançları:
1 2 3 4 5 7
1 2 3 4 6 7
1. ( ) ( ) ( ) ( ) ( ) ( )
2. ( ) ( ) ( ) ( ) ( ) ( )
G s G s G s G s G s G s
G s G s G s G s G s G s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
29
Temas Etmeyen Döngüler: Herhangi bir ortak düğümü olmayan döngülerdir. Örneğin aşağıdaki işaret akış diyagramında, kazancı G2(s)H1(s) olan döngü, kazançları G4(s)H2(s), G4(s) G5(s)H3(s), ve G4(s) G6(s)H3(s) olan döngülerle temas etmemektedir.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
30
Temas Etmeyen Döngü Kazancı: Birbirine ikişer ikişer, üçer üçer, dörder dörder vs. temas etmeyen döngülerin kazançlarının çarpımıdır. Örneğin aşağıdaki işaret akış diyagramında, kazancı G2(s)H1(s) olan döngü ile kazancı G4(s)H2(s) olan döngü birbirine ikişer ikişer temas etmeyen döngülerden biridir. Dolayısıyla bu temas etmeyen döngülerin toplam kazancı G2(s)H1(s) G4(s)H2(s) dir. Bu işaret akış diyagramında, birbirine ikişer ikişer temas etmeyen toplam 3 adet döngü vardır. Temas etmeyen bu döngülere ilişkin kazançlar:
2 1 4 2
2 1 4 5 3
2 1 4 6 3
1. ( ) ( ) ( ) ( )
2. ( ) ( ) ( ) ( ) ( )
3. ( ) ( ) ( ) ( ) ( )
G s H s G s H s
G s H s G s G s H s
G s H s G s G s H s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
31
Aynı diyagramda kazançları G4(s)G5(s)H3(s), ve G4(s)G6(s)H3(s) olan döngüler birbirine ikişer ikişer temas etmeyen döngü olarak değerlendirilemez, zira bu iki döngüde ortak olan düğümler mevcuttur. Bu örnek için birbirine üçer üçer temas etmeyen döngü mevcut değildir.
Bu tanımlardan sonra artık Mason Kuralı tanıtılabilir.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
32
Mason Kuralı: İşaret Akış Diyagramı formunda sunulmuş bir sistemin transfer fonksiyonu aşağıdaki formülle bulunur:
( )( )
( )
k k
k
TC s
G sR s
: İleri yol sayısı
: 'ıncı ileri yolun kazancı
: 1 döngü kazançları
+ ikişer ikişer temas etmeyen döngü kazançları
- üçer üçer temas etmeyen döngü kazançları
+ ...........
k
k
T k
: - 'nın 'ıncı ileri yola temas eden döngülerinin kazancık k

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
33
Ör: Aşağıda işaret akış diyagramı verilen sistemin transfer fonksiyonunu bulunuz.
C: Öncelikle ileri yolları ve ileri yol kazançlarını belirleyelim: Bu örnek için tek bir ileri yol vardır ve bu yola ilişkin kazanç değeri aşağıdaki gibidir:
1 2 3 4 5( ) ( ) ( ) ( ) ( )G s G s G s G s G s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
34
Daha sonra döngü kazançlarını belirleyelim:
2 1
4 2
7 4
2 3 4 5 6 7 8
1. ( ) ( )
2. ( ) ( )
3. ( ) ( )
4. ( ) ( ) ( ) ( ) ( ) ( ) ( )
G s H s
G s H s
G s H s
G s G s G s G s G s G s G s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
35
Birbirine ikişer ikişer temas etmeyen döngülerin kazançlarını belirleyelim: Dikkat edilirse 1. ve 2. döngüler, 1. ve 3. döngüler, 2. ve 3. döngüler birbirine ikişer ikişer temas etmemektedir. Ancak 1., 2. ve 3. döngülerin tamamı 4. döngüye temas etmektedir. Bu nedenle ikişer ikişer temas etmeyen döngülerin her birinin kazancı şu şekilde olacaktır: 1. ve 2. Döngü: G2(s)H1(s)G4(s)H2(s)
1. ve 3. Döngü: G2(s)H1(s)G7(s)H4(s)
2. ve 3. Döngü: G4(s)H2(s)G7(s)H4(s)

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
36
Birbirine üçer üçer temas etmeyen döngülerin kazançlarını belirleyelim: 1., 2. ve 3. Döngü: G2(s)H1(s)G4(s)H2(s)G7(s)H4(s)
Birbirine dörder dörder temas etmeyen döngü yoktur. İlgili döngü kazançları bulunduğuna göre artık formülde değerler yerine yazılabilir.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
37
Genel formül şu şekildeydi: ( )
( )( )
k k
k
TC s
G sR s
Tek bir ileri yol olduğu için formül şu hali alır: 1 1( )( )
( )
C s TG s
R s
Δ’yı hesaplayalım:
2 1 4 2 7 4 2 3 4 5 6 7 8
: 1 döngü kazançları
+ ikişer ikişer temas etmeyen döngü kazançları
- üçer üçer temas etmeyen döngü kazançları
= 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )G s H s G s H s G s H s G s G s G s G s G s G s G
2 1 4 2 2 1 7 4 4 2 7 4
2 1 4 2 7 4
( )
+ ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
- ( ) ( ) ( ) ( ) ( ) ( )
s
G s H s G s H s G s H s G s H s G s H s G s H s
G s H s G s H s G s H s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
38
Δ1’i hesaplayalım: 1 nolu ileri yola 1., 2. ve 3. döngüler temas etmekte, sadece 4. döngü temas etmemektedir. Bu nedenle,
1 7 41 ( ) ( )G s H s
Sonuç olarak,
1 2 3 4 5 7 41 1( ) ( ) ( ) ( ) ( ) 1 ( ) ( )( )
( )( )
G s G s G s G s G s G s H sC s TG s
R s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
39
Alıştırma:
1 3 2
2 2 1 2 1 3 3
( ) ( ) 1 ( )( )( )
( ) 1 ( ) ( ) ( ) ( ) ( ) 1 ( ) ( )
G s G s G sC sG s
R s G s H s G s G s H s G s H s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
40
• Blok Diyagramlar • Geribeslemeli Sistemlerin Analizi ve Tasarımı • İşaret Akış Diyagramları • Mason Kuralı • Durum Denklemlerinin İşaret Akış Diyagramları • Durum Uzayında Alternatif Gösterimler

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
41
Aşağıda verilen durum ve çıkış denklemlerini göz önünde bulunduralım:
1 1 2 3
2 1 2 3
3 1 2 3
1 2 3
2 5 3 2
6 2 2 5
3 4 7
4 6 9
x x x x r
x x x x r
x x x x r
y x x x
Bu sistemin işaret akış diyagramını çizelim. İlk adım düğümleri oluşturmaktır. Düğümler girişten başlamak üzere Şekil (a)’daki gibi oluşturulur. Daha sonra her bir durum değişkeninin türevi ile kendisi Şekil (b)’deki gibi integratör (1/s) ile birleştirilir:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
42
Daha sonra x1 durum değişkenine ilişkin denklemin işaret akış diyagramı aşağıdaki gibi oluşturulur:
1 1 2 3
2 1 2 3
3 1 2 3
1 2 3
2 5 3 2
6 2 2 5
3 4 7
4 6 9
x x x x r
x x x x r
x x x x r
y x x x

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
43
x2 durum değişkenine ilişkin denklemin işaret akış diyagramı aşağıdaki gibi oluşturulur:
1 1 2 3
2 1 2 3
3 1 2 3
1 2 3
2 5 3 2
6 2 2 5
3 4 7
4 6 9
x x x x r
x x x x r
x x x x r
y x x x

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
44
x3 durum değişkenine ve çıkış değişkenine ilişkin denklemlerin de işaret akış diyagramı aşağıdaki gibi oluşturulur ve verilen sistemin işaret akış diyagramının nihai formu aşağıdaki gibi elde edilir:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
45
• Blok Diyagramlar • Geribeslemeli Sistemlerin Analizi ve Tasarımı • İşaret Akış Diyagramları • Mason Kuralı • Durum Denklemlerinin İşaret Akış Diyagramları • Durum Uzayında Alternatif Gösterimler
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
46
İki hafta önce transfer fonksiyonu – durum uzayı dönüşümünden bahsederken, bu dönüşüm için sadece “faz değişkenleri” formunu göstermiştik. Faz değişkenleri formunda, durum değişkenleri birbirinin ardışık türevi olacak şekilde seçiliyordu. Ancak bu dönüşüm için tek yol “Faz Değişkenleri Formu” değildir. Verilen bir transfer fonksiyonu, durum-uzay formuna farklı şekillerde dönüştürülebilir. Tabii ki her gösterim türü, belirli bir giriş için aynı çıkışı üretir. Ancak her bir gösterim türünün, sistemin analizi ve tasarımı açısından belirli avantajları vardır. Bu derste son olarak bu alternatif gösterim türlerinden bahsedeceğiz. Bunun için 4 farklı formu tanıtılacaktır: 1. Kaskat Form 2. Paralel Form 3. Kontrolör Kanonik Form (Controller Canonical Form) 4. Gözlemci Kanonik Form (Observer Canonical Form) Bu yapıların her birini inceleyelim:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
47
Kaskat (Seri) Form: Bu formun elde edilmesini sayısal bir örnek üzerinden anlatalım: Aşağıdaki şekil, bu sistemin kaskat bir şekilde ifadesini göstermektedir. Her bir birinci mertebeden bloğun çıkış bir durum değişkeni olarak etiketlenir. Dikkat edilirse bu durum değişkeni, faz değişkenleri değildir. Şimdi işaret akış diyagramlarını da kullanarak, bu sistemin durum-uzay gösteriminin kaskat formda nasıl elde edileceğine bakalım. Yukarıdaki her bir birinci mertebeden bloğun transfer fonksiyonu şeklindedir. İçler-dışlar çarpımı yapılırsa, elde edilir.
( ) 24
( ) ( 2)( 3)( 4)
C s
R s s s s
( ) 1
( )
i
i i
C s
R s s a
( ) ( )i i is a C s R s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
48
Ters Laplace dönüşümü alınırsa: Bu denklemin işaret akış diyagramı Şekil (a)’daki gibidir. Eğer bu analiz, verilen örnekteki herbir bloğa uygulanırsa, Şekil (b)’de görülen işaret akış diyagramı elde edilir.
( ) ( )( ) ( ) ( ) ( )i i
i i i i i i
dc t dc ta c t r t a c t r t
dt dt
( ) ( )i i is a C s R s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
49
Bu işaret akış diyagramına göre, durum-uzay denklemleri aşağıdaki gibi elde edilir.
1 1 2
2 2 3
3 3
4
3
2 24
x x x
x x x
x x r
Çıkış denklemi: 1( )y c t x
Bu denklemleri vektör-matris formunda yazalım:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
50
4 1 0 0
0 3 1 0
0 0 2 24
1 0 0
r
y
x x
x
( ) 24
( ) ( 2)( 3)( 4)
C s
R s s s s
Verilen transfer fonksiyonu ve onun kaskat formdaki durum-uzay dönüşümü bir arada incelendiğinde, sistem matrsinin diagonal elemanlarında, transfer fonksiyonunun kutuplarının olduğunu görürüz. İki hafta önceki dersimizde ise, aynı transfer fonksiyonu için, faz değişkenleri yöntemiyle durum-uzay denklemini aşağıdaki gibi elde etmiştik. Faz değişkenleri formunda sistem matrisinin en alt satırı, karakteristik polinomialin katsayılarını içeriyordu.
3 2
( ) 24
( ) 9 26 24
C s
R s s s s
0 1 0 0
0 0 1 0
24 26 9 1
1 0 0
r
y
x x
x

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
51
Paralel Form: Bu formda sistem matrisi diagonal bir matristir. Ancak verilen bir transfer fonksiyonun durum-uzay denklemlerinin paralel formda yazılabilmesi için, karakteristik denklemin katlı kökünün olmaması gerekir. Verilen bir transfer fonksiyonunun bu formda yazılabilmesi için, ilgili transfer fonksiyonu kısmi kesirlerine ayrılır. Bu formun elde edilmesini açıklamak için, az önce kullandığımız örnek sistemi yeniden göz önünde bulunduralım. Bu transfer fonksiyonunun kısmi kesirlere ayrılmış hali şu şekildedir: Dolayısıyla çıkış denklemi şu şekilde yazılabilir: Şimdi bu denkleme ilişkin işaret akış diyagramını oluşturalım ve ardından bu işaret akış diyagramını göz önünde bulundurarak durum-uzay denklemlerini yazalım.
( ) 24 12 24 12
( ) ( 2)( 3)( 4) 2 3 4
C s
R s s s s s s s
12 24 12( ) ( ) ( ) ( )
2 3 4C s R s R s R s
s s s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
52
12 24 12( ) ( ) ( ) ( )
2 3 4C s R s R s R s
s s s
1 1
2 2
3 3
2 12
3 24
4 12
x x r
x x r
x x r
1 2 3( )y c t x x x
Bu denklemleri vektör-matris formunda yazalım:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
53
2 0 0 12
0 3 0 24
0 0 4 12
1 1 1
r
y
x x
x
( ) 24
( ) ( 2)( 3)( 4)
C s
R s s s s
Verilen transfer fonksiyonu ve onun paralel formdaki durum-uzay dönüşümü bir arada incelendiğinde, sistem matrisinin sadece diagonal elemanlardan oluştuğunu görürüz. Bu diagonal elemanlar, transfer fonksiyonunun kutuplarıdır. Bu gösterim şeklinin önemli bir avantajı, her bir durum değişkenine ilişkin denklemin, kendisi ve giriş değişkeni cinsinden bir denkleme olmasıdır. Böylece her bir durum değişkenine ilişkin denklem tek bir durum değişkeninin denklemi olduğu için kolaylıkla çözülebilir. Bu tür sistemlere (her bir durum değişkenine ilişkin denklemin bağımsız olarak çözülebildiği sistemlere) ayrık (decoupled) sistemler denir. Eğer sistemin katlı kutbu varsa, paralel form yine oluşturulabilir ancak bu durumda sistem matrisi diagonal bir matris olmaz ve dolayısıyla bu formun avantajı kalmaz.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
54
Kontrolör Kanonik Form: Bu form, faz değişkenleri kullanılarak elde edilir ancak faz değişkenlerinin sırası daha önce yaptığımızın tam tersi seçilir. Aşağıdaki sistemi örnek olarak kullanalım. Eğer bu sistemin durum-uzay denklemlerini faz değişkenleri yöntemi ile elde etseydik, denklemlerin biçimi aşağıdaki gibi olacaktı: Şimdi durum değişkenlerinin tam tersi sırada seçildiğini düşünelim:
1 1
2 2
3 3
1
2
3
0 1 0 0
0 0 1 0
24 26 9 1
2 7 1
x x
x x r
x x
x
y x
x
2
3 2
( ) 7 2
( ) 9 26 24
C s s s
R s s s s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
55
3 3
2 2
31 1
3
2
1
0 1 0 0
0 0 1 0
24 26 9 1
2 7 1
x x
x x r
x x
x
y x
x
Bu denklemleri, durum değişkenlerinin artan sırasına göre yazarsak, kontrolör kanonik formu elde etmiş oluruz:

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
56
1 1
2 2
3 3
1
2
3
9 26 24 1
1 0 0 0
0 1 0 0
1 7 2
x x
x x r
x x
x
y x
x
Bu form, kontrolör tasarımı için oldukça kullanışlı bir formdur. Bu nedenle ileride sıkça anılacaktır.

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
57
Gözlemci Kanonik Form: Bu form, ilgili transfer fonksiyonunun payı ve paydası, s’in en yüksek derecesine bölünerek oluşturulur. Aşağıdaki sistemi göz önünde bulunduralım: Pay ve payda s3’e bölünürse; İçler-dışlar çarpımı yapılırsa; s‘in ortak terimlerinin parantezine alınırsa;
2
3 2
( ) 7 2
( ) 9 26 24
C s s s
R s s s s
2 3
2 3
1 7 2( )
9 26 24( )1
C s s s s
R s
s s s
2 3 2 3
1 7 2 9 26 24( ) 1 ( )R s C s
s s s s s s
2 3
1 1 1( ) ( ) 9 ( ) 7 ( ) 26 ( ) 2 ( ) 24 ( )C s R s C s R s C s R s C s
s s s

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
58
2 3
1 1 1( ) ( ) 9 ( ) 7 ( ) 26 ( ) 2 ( ) 24 ( )C s R s C s R s C s R s C s
s s s
İntegratör (1/s) parantezine alınırsa;
1 1 1
( ) ( ) 9 ( ) 7 ( ) 26 ( ) 2 ( ) 24 ( )C s R s C s R s C s R s C ss s s
Bu ifadenin işaret akış diyagramı ve durum değişkenlerinin seçimi şu şekildedir;

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
59
Bu işaret akış diyagramına göre, durum-uzay gösterimi aşağıdaki gibi olur:
Bu form, gözlemci tasarımında oldukça kullanışlı bir formdur.
1 1
2 2
3 3
1
2
3
9 1 0 1
26 0 1 0
24 0 0 0
1 0 0
x x
x x r
x x
x
y x
x

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
60
Alıştırma: Aşağıda verilen geribeslemeli sistemi durum uzayında kaskat formda ifade ediniz.
3 1 0
200 102 100
2 1
r
y
x x
x

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
61
Alıştırma: Aynı sistemi durum uzayında kontrolör kanonik formda ifade ediniz.
105 506 1
1 0 0
100 500
r
y
x x
x

DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EET305 OTOMATİK KONTROL I
Dr. Uğur HASIRCI
62
Alıştırma: Aşağıda verilen sistemi durum uzayında faz değişkenleri formunda, kaskat formda, paralel formda, kontrolör kanonik formda ve gözlemci kanonik formda ifade ediniz.
( ) ( 3)
( ) ( 4)( 6)
C s s
R s s s

63





























