Embed Size (px)
Citation preview

ING. JORGE LUIS PAREDES ESTACIO
UNIVERSIDAD PRIVADA ANTENOR ORREGOFACULTA DE INGENIERIA
ESCUELA PROFESIONAL DE INGENIERIA CIVIL
SISTEMAS DINÁMICOS DE UN GRADO DELIBERTAD
- VIBRACIÓN LIBRE NO AMORTIGUADA
- VIBRACIÓN LIBRE AMORTIGUADA
- VIBRACIONES FORZADAS ARMÓNICAS
- VIBRACIONES TRANSITORIAS
- EXCITACIÓN EN LA BASE
- LA ENERGÍA EN LA RESPUESTA DINÁMICA
VIBRACIÓN LIBRE NO AMORTIGUADA
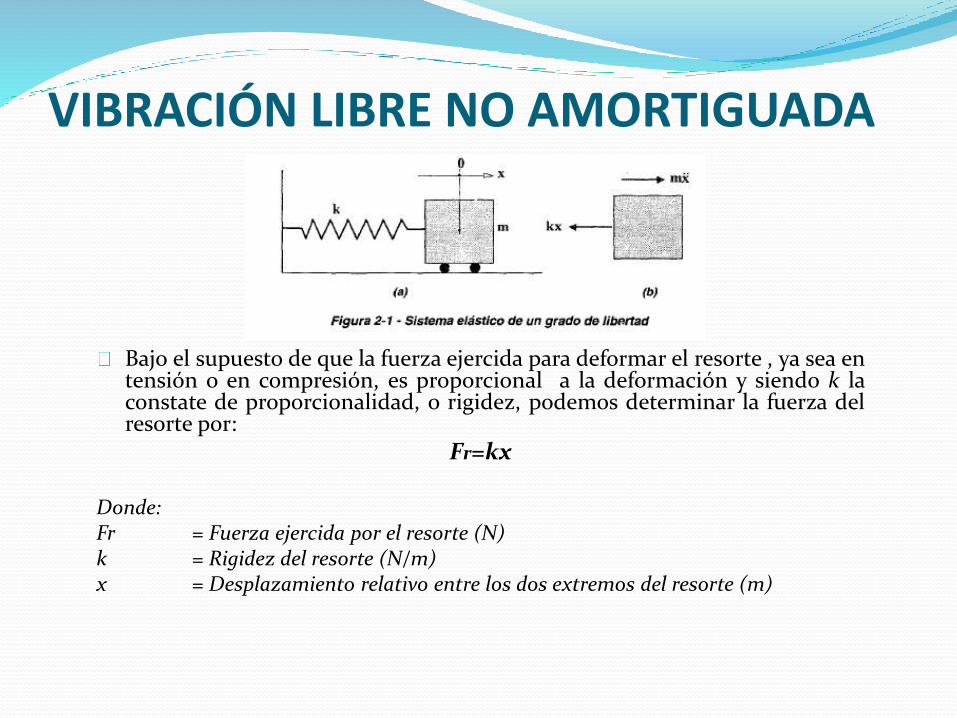
Bajo el supuesto de que la fuerza ejercida para deformar el resorte , ya sea entensión o en compresión, es proporcional a la deformación y siendo k laconstate de proporcionalidad, o rigidez, podemos determinar la fuerza delresorte por:
Fr=kx
Donde:Fr = Fuerza ejercida por el resorte (N)k = Rigidez del resorte (N/m)x = Desplazamiento relativo entre los dos extremos del resorte (m)
VIBRACIÓN LIBRE NO AMORTIGUADA
La fuerza Inercial que se tiene en la masa m debido ala aceleración a, esta dada, según la segunda ley deNewton:
Fi=-m 𝒙
Donde:
Fr = Fuerza inercial que obra sobre la masa (N)
m = Masa (kg)
𝑥 = Aceleración de la masa (m/𝑠2)
VIBRACIÓN LIBRE NO AMORTIGUADA
Dividiendo por m y llamando la constante k/m, se obtiene:
La solución de esta ecuación diferencial es:
Donde A y B dependen de las condiciones iniciales que indujeron al movimiento.
VIBRACIÓN LIBRE NO AMORTIGUADA
Por tanto la solución de la ecuación se convierte:
Donde:
Vo = velocidad de la masa en el instante t=0 (m/s)
Xo = desplazamiento de la masa en el instante t=0 (m)
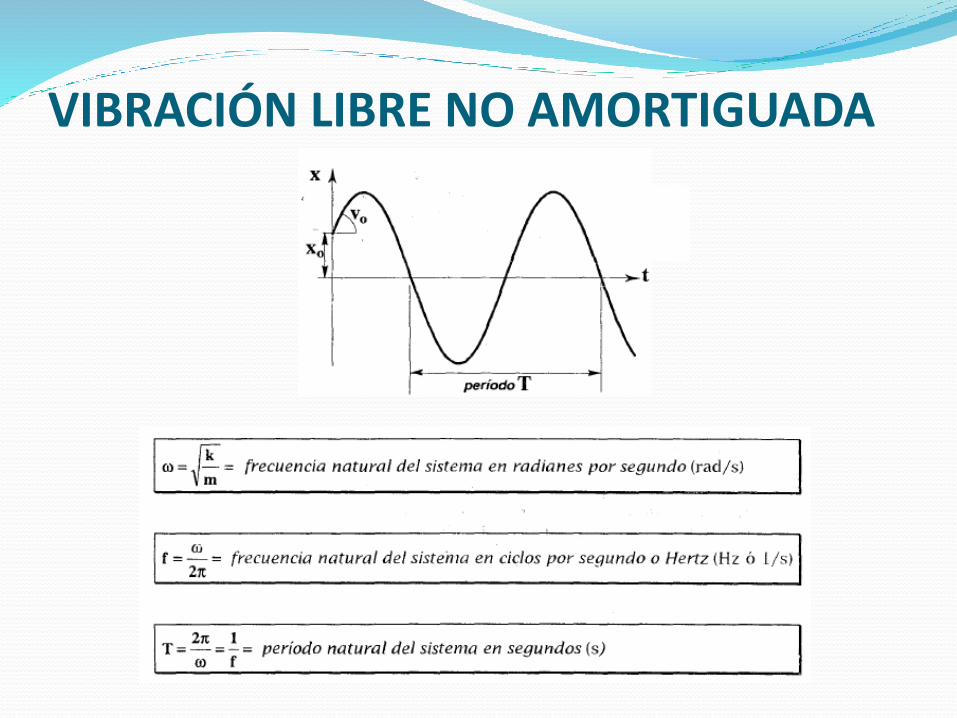
ω = frecuencia natural del sistema (rad/s)
VIBRACIÓN LIBRE NO AMORTIGUADA
VIBRACIÓN LIBRE AMORTIGUADA
Los movimientos oscilatorios tienden a disminuir con el tiempo hasta desaparecer. Esto se debe al amortiguamiento que se presenta, el cual hace que parte de la energía se disipe.
Las causas de este amortiguamiento están asociadas a diferentes fenómenos como la fricción de la masa sobre la superficie de apoyo, el efecto del aire que rodea la masa, la no linealidad del material del resorte, entre otros.
Entre los modelos más usados es el amortiguamiento viscoso.
VIBRACIÓN LIBRE AMORTIGUADA
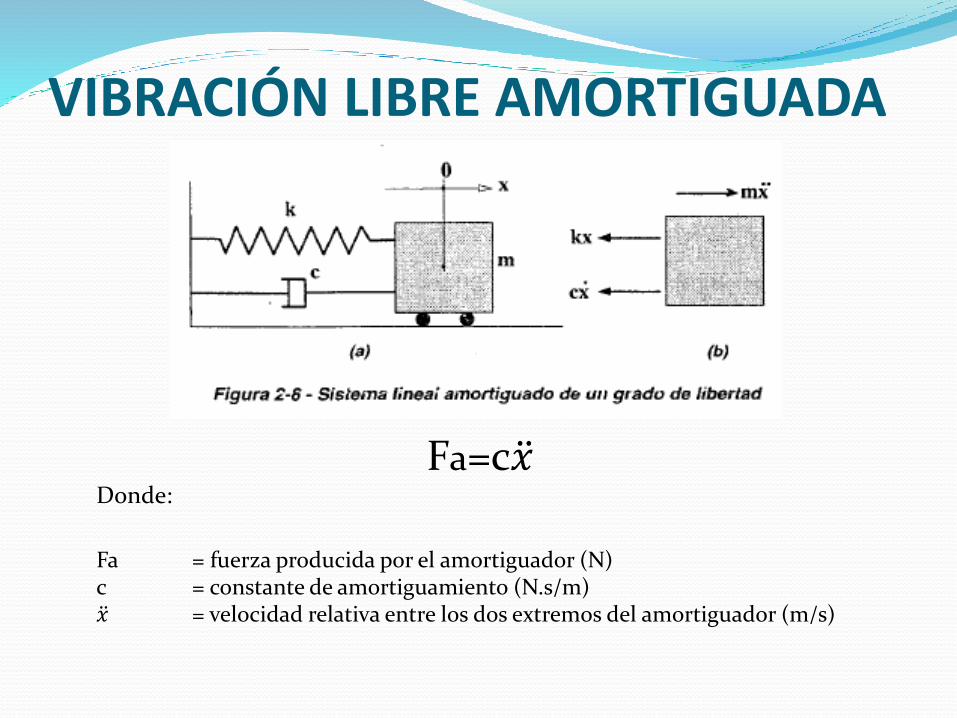
Fa=c 𝑥Donde:
Fa = fuerza producida por el amortiguador (N)c = constante de amortiguamiento (N.s/m) 𝑥 = velocidad relativa entre los dos extremos del amortiguador (m/s)
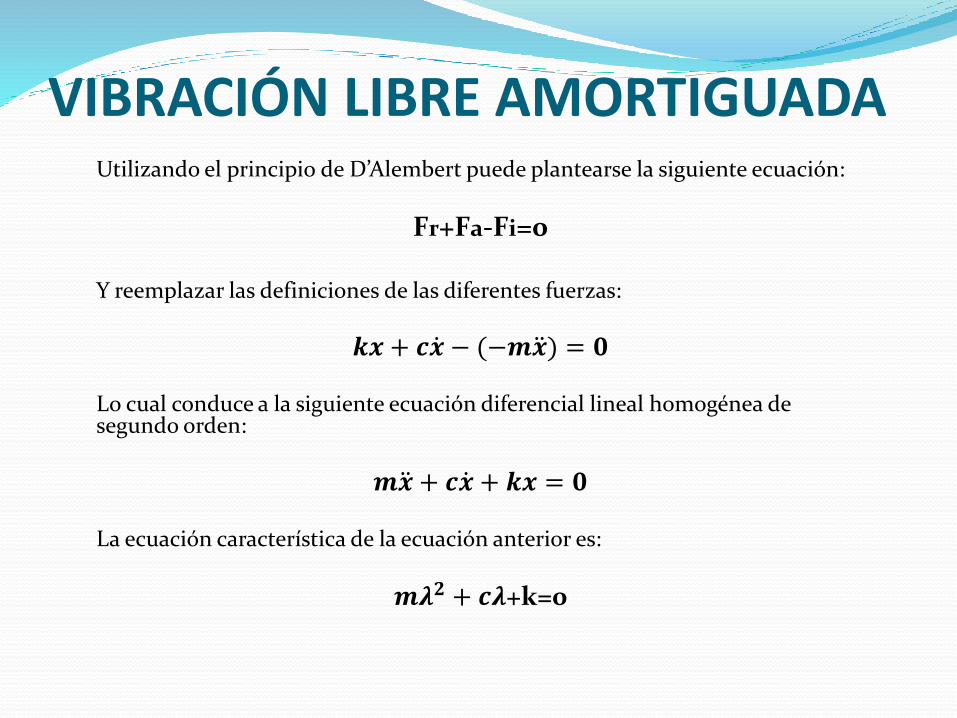
VIBRACIÓN LIBRE AMORTIGUADAUtilizando el principio de D’Alembert puede plantearse la siguiente ecuación:
Fr+Fa-Fi=0
Y reemplazar las definiciones de las diferentes fuerzas:
𝒌𝒙 + 𝒄 𝒙 − (−𝒎 𝒙) = 𝟎
Lo cual conduce a la siguiente ecuación diferencial lineal homogénea de segundo orden:
𝒎 𝒙 + 𝒄 𝒙 + 𝒌𝒙 = 𝟎
La ecuación característica de la ecuación anterior es:
𝒎𝝀𝟐 + 𝒄𝝀+k=0
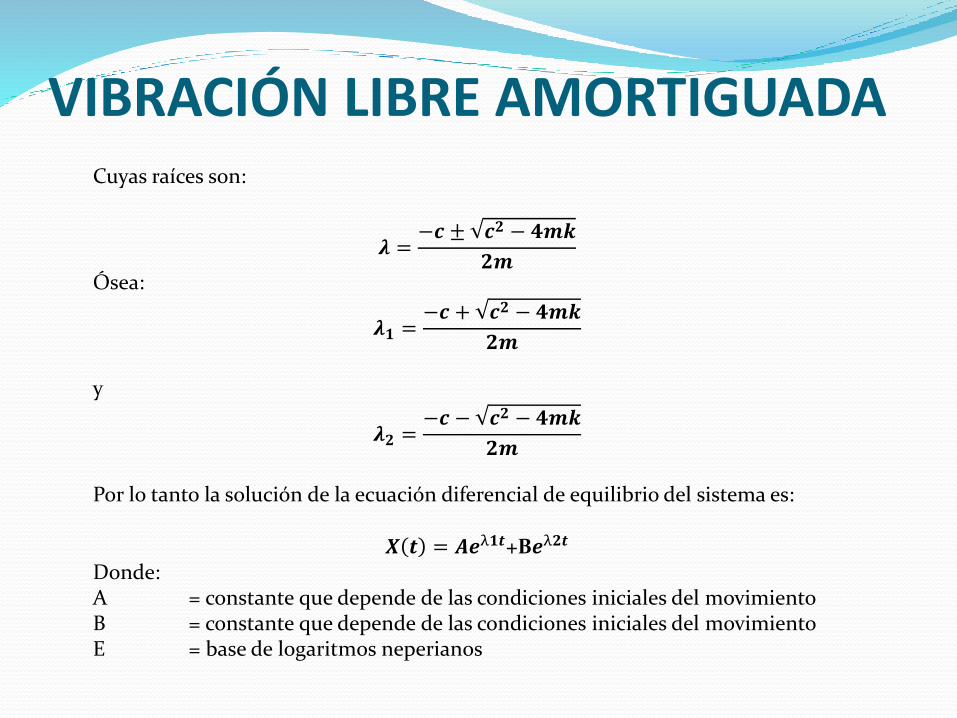
VIBRACIÓN LIBRE AMORTIGUADACuyas raíces son:
𝝀 =−𝒄 ± 𝒄𝟐 − 𝟒𝒎𝒌
𝟐𝒎Ósea:
𝝀𝟏 =−𝒄 + 𝒄𝟐 − 𝟒𝒎𝒌
𝟐𝒎
y
𝝀𝟐 =−𝒄 − 𝒄𝟐 − 𝟒𝒎𝒌
𝟐𝒎
Por lo tanto la solución de la ecuación diferencial de equilibrio del sistema es:
𝑿 𝒕 = 𝑨𝒆λ𝟏𝒕+B𝒆λ𝟐𝒕
Donde:A = constante que depende de las condiciones iniciales del movimientoB = constante que depende de las condiciones iniciales del movimientoE = base de logaritmos neperianos
VIBRACIÓN LIBRE AMORTIGUADA
Existen tres casos de solución para la ecuación anterior dependiendo del valor radical de la ecuación:
- AMORTIGUAMIENTO CRÍTICO
- AMORTIGUAMIENTO MAYOR QUE EL CRÍTICO
- AMORTIGUAMIENTO MENOR QUE EL CRÍTICO
AMORTIGUAMIENTO CRÍTICO
Cuando el radical de la ecuación





























