Embed Size (px)
Citation preview

Tema: Acciones Básicas de Control - 1
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Sistemas de Controlapuntes capítulo IV
(controladores industriales)
Facultad de Ingeniería -UNCPBA
Dto. de Ingeniería Electromecánica
Prof: Dr. Gerardo Acosta
Tema: Acciones Básicas de Control - 2
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
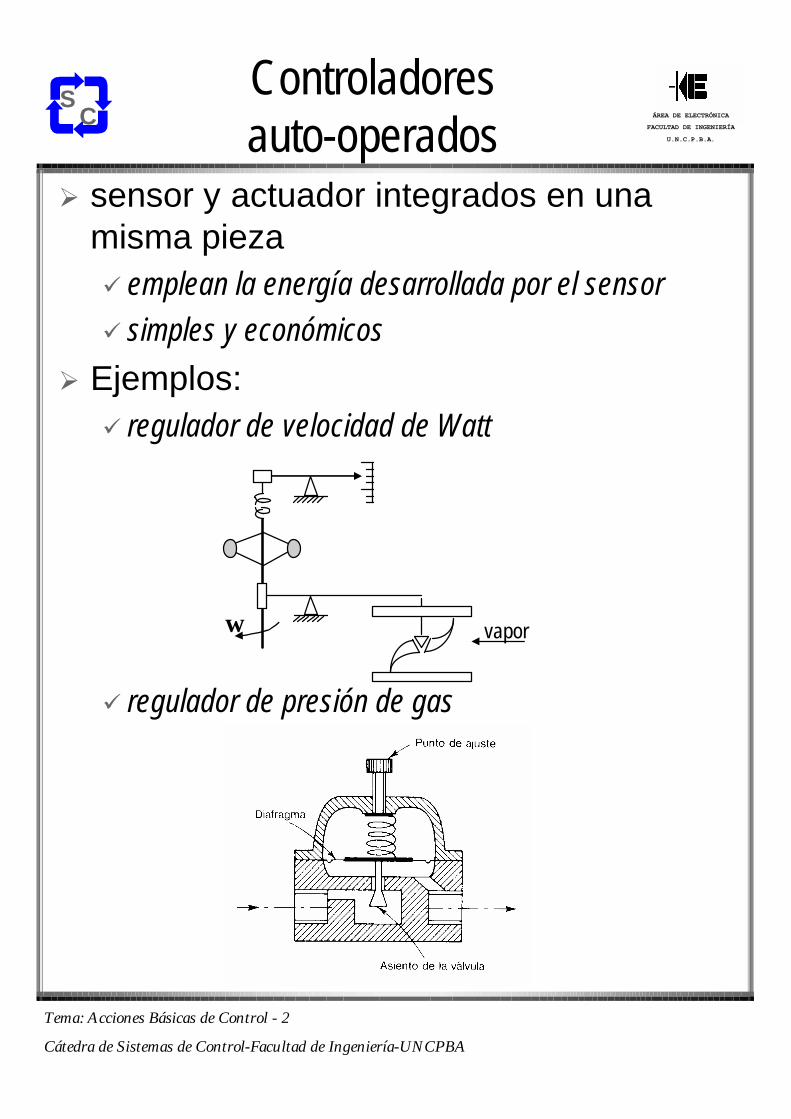
Controladores auto-operados
Ø sensor y actuador integrados en una misma piezaü emplean la energía desarrollada por el sensorü simples y económicos
Ø Ejemplos:ü regulador de velocidad de Watt
ü regulador de presión de gas
ω vapor
Tema: Acciones Básicas de Control - 3
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
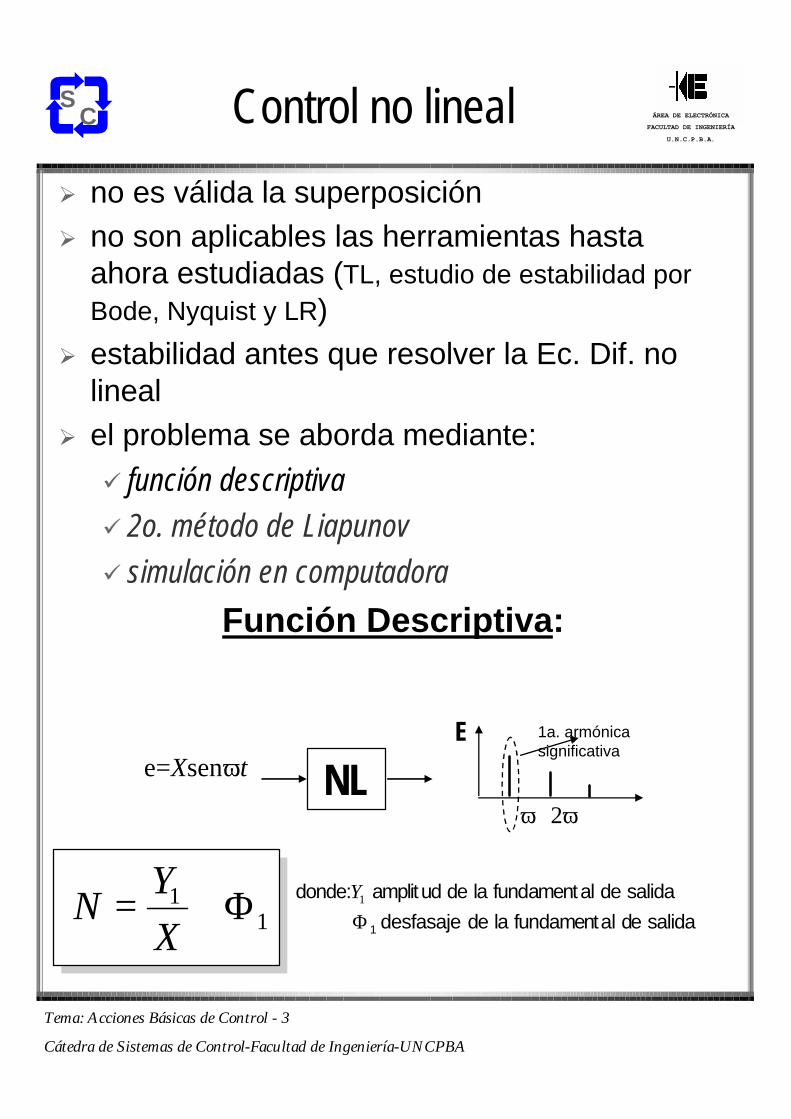
Control no lineal
Ø no es válida la superposiciónØ no son aplicables las herramientas hasta
ahora estudiadas (TL, estudio de estabilidad por Bode, Nyquist y LR)
Ø estabilidad antes que resolver la Ec. Dif. no lineal
Ø el problema se aborda mediante:ü función descriptivaü 2o. método de Liapunovü simulación en computadora
Función Descriptiva:
NLe=XsenωtE
ω 2ω
1a. armónica significativa
NYX
= ∠Φ11
donde: amplitud de la fundamental de salida desfasaje de la fundamental de salida1
Y1
Φ

Tema: Acciones Básicas de Control - 4
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Control no lineal
Ø N es función deü amplitudü frecuencia
de la entrada salvo que la NL no posea almacena-dores de energía
Ø Caso de aplicación: Controlador SI-NO
q En general U2 = 0 ó -U1
ü cálculo de su FD:
u tU e tU e t
( )( )( )
=>≤
1
2
00
si si
U2
U1u(t)e(t)

Tema: Acciones Básicas de Control - 5
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Controlador SI-NO
Ø Ejemplo:ü en situaciones prácticas no siempre es necesario hallar N sino
simplemente encontrar rangos de funcionamiento
y t A A n t B n t
y t B n t
y t B t Y t
Y y t td t y t td t
Mtd t
M
NYX
MX
n nn
nn
( ) ( cos sin )
( ) sin
( ) sin sin
( ) sin ( ) ( ) sin ( )
sin ( )
= + +
=
= =
= =
= =
= ∠ ° =
=
∞
=
∞
∑∑
∫ ∫
∫
0 1
1
1 1
10
2
0
0
1
1 2
2 4
04
ω ω
ω
ω ω
πω ω
πω ω
πω ω
π
π
π π
π
siendo la armonica funtamental:
donde
t
hU1=V
U2=0h(t)
qi(t)V
qo(t)
R

Tema: Acciones Básicas de Control - 6
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Controladores PID
ü compensadores en el lazo directo
Ø Acción puramente integral
ü c(t) sin error en estado estacionario Ess (aun con p(t))ü u(t) = cte. si Ess =0ü retraso de fase (-90): desestabiliza
Ø Acción proporcional-integral
ü se añade un cero en la transferenciaü caso particular de compensador por retrasoü en t para error tipo escalón
u t k e t dtt
( ) ( )= ∫10
I Gpr(t) c(t)
e(t) u(t)p(t)
-
PI Gpr(t) c(t)
e(t) u(t)p(t)
-u t kpe t k e t dtt
( ) ( ) ( )= + ∫10
kp
2kp
ti
u(t)control PI
control P
Tema: Acciones Básicas de Control - 7
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
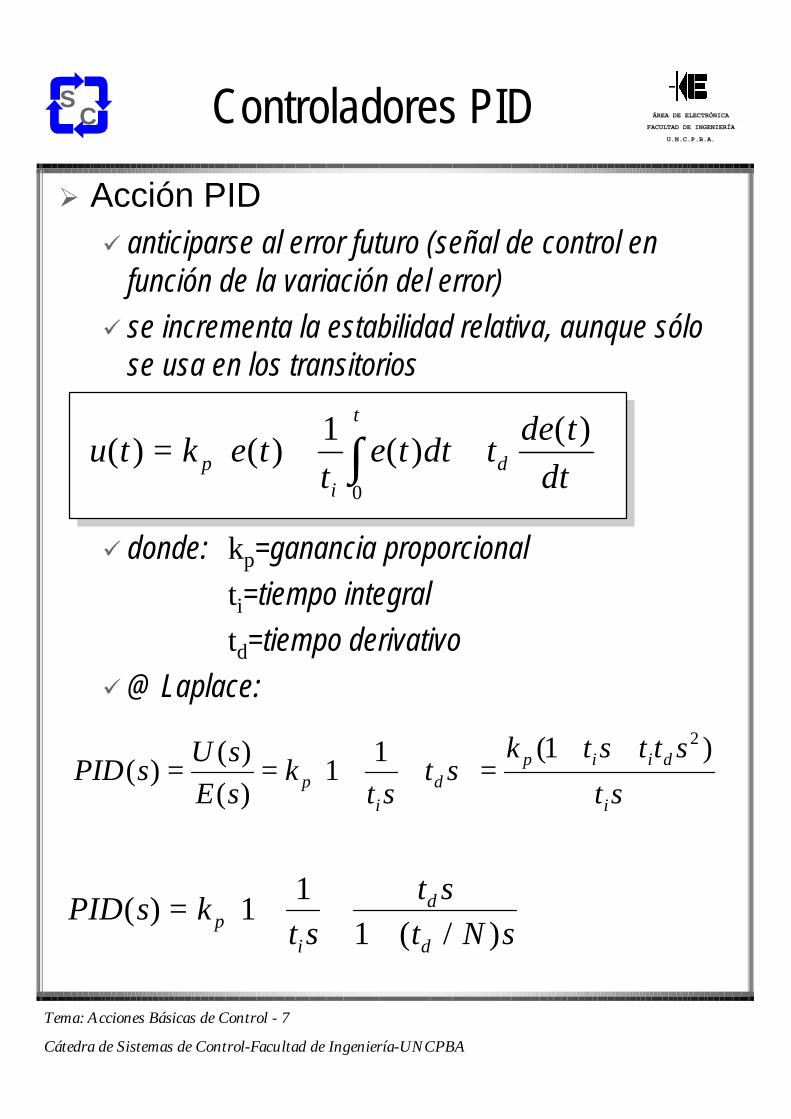
Controladores PID
Ø Acción PIDü anticiparse al error futuro (señal de control en
función de la variación del error)ü se incrementa la estabilidad relativa, aunque sólo
se usa en los transitorios
ü donde: kp=ganancia proporcionalti=tiempo integraltd=tiempo derivativo
ü@ Laplace:
u t k e tt
e t dt tde t
dtpi
t
d( ) ( ) ( )( )
= + +
∫
1
0
st
sttstkst
stk
sEsU
sPIDi
diipd
ip
)1(11
)()(
)(2++
=
++==
PID s kt s
t st N sp
i
d
d
( )( / )
= + ++
1
11

Tema: Acciones Básicas de Control - 8
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Controladores PID
Ø Casos especiales
Ø Lugar de raíces
ü tomando ti como parámetroq ceros reales para ti>=4td
q si ti -> infinito z1=0; z2=-1/td
ü la respuesta transitoria se ajusta con tdq prácticamente independiente
t PIt PD tt t PID
d
i d
i d
= → →= ∞ → →>> → →
0 compensador por ret rasocero en - 1/
2 polos y 2 ceros reales
zt
t t tt td
i i d
i d1 2
212
42− =
−±
−
jω
σ
-1/td
-1/2td

Tema: Acciones Básicas de Control - 9
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Sintonía de PID
ØMétodos iterativos de prueba y error
ØMétodos directosüMargen de fase (diag. de Bode)
üAsignación de polos y ceros (diag. de Evans)qambas requieren modelo de la planta
üReglas de Ziegler y Nicholsqempíricas, aunque surgen de optimizar el IAE
sobre plantas integradorasq la respuesta de la planta debe ser sigmoidea
(sin integradores puros ni polos complejos conjugados dominantes)qdos métodos básicos: a L.A. y L.C.
Tema: Acciones Básicas de Control - 10
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
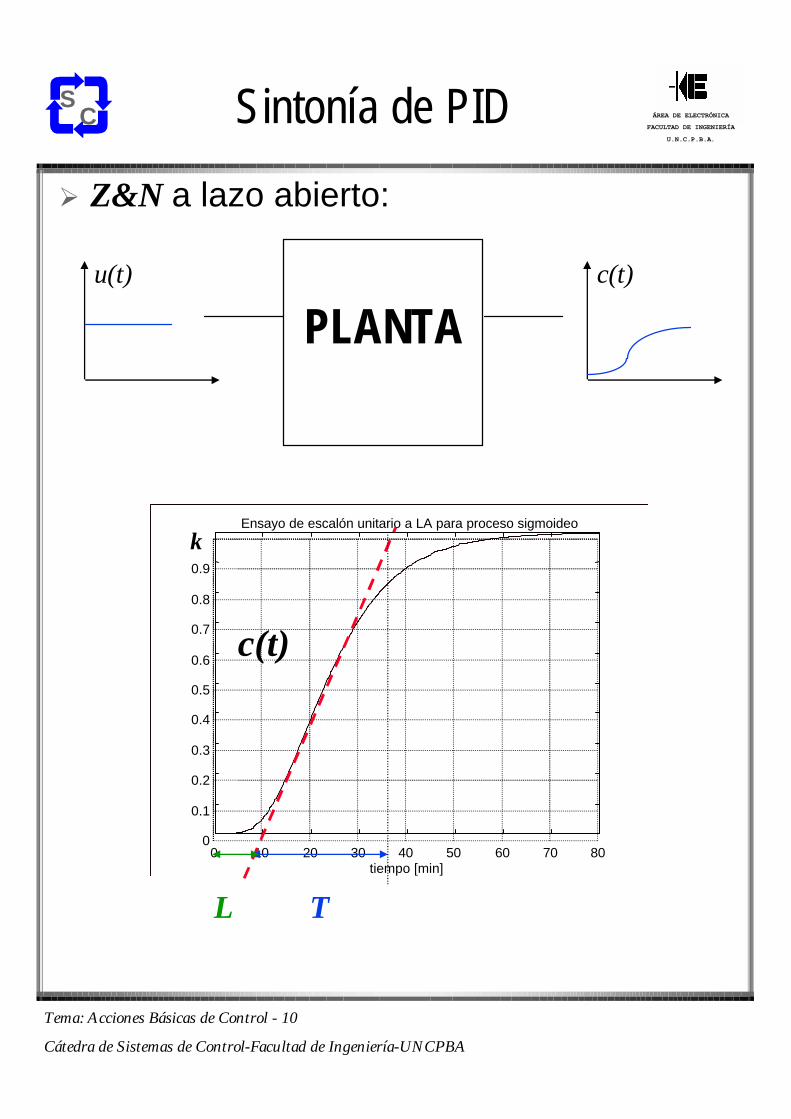
Sintonía de PID
Ø Z&N a lazo abierto:
PLANTAu(t) c(t)
0 10 20 30 40 50 60 70 800
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
tiempo [min]
Ensayo de escalón unitario a LA para proceso sigmoideo
k
c(t)
L T

Tema: Acciones Básicas de Control - 11
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Sintonía de PID
Z&N a lazo cerrado:ü o de ciclo límite
q peligroso para ciertos casos
PID PI P
kp=1,2T/L kp=0,9T/L kp=T/L
ti=2xL ti=L/0,3 ti=∞
td=0,5xL td=0 td=0
kp Gpr(t) c(t)
e(t) u(t)p(t)
-c(t)
Pc

Tema: Acciones Básicas de Control - 12
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Sintonía de PID
Ø Ambosü pretenden sobrepaso máximo del 25%
q característica “quarter decay”
ü útiles porque no es necesario conocer FT de plantaü dan una 1a. estimación
q ajuste final sobre el dominio temporal
Ø Método de Aström y Hagglundü para la determinación de Kc y Pcü Fundamento:
q cualquier sistema con desfasaje > 180o puede oscilar con amplitud controlada cuando se lo compensa con una NL
PID PI P
kp=0,6xKc kp=0,45xKc kp=0,5xKc
ti=Pc/2 ti=Pc/1,2 ti=∞
td=Pc/8 td=0 td=0
NL G(jω)r(t) c(t)
-

Tema: Acciones Básicas de Control - 13
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Sintonía de PID
q si NL=“bang-bang”
q para que oscile q criterio de Barkhausen
q con [1] y [2] se diseña la NL para una amplitud deseada
Ø Controladores PID adaptablesüGanancia tabulada
q Matriz de McVicar-Whealan (Fuzzy Control)
[ ]G jN
( )ω =−1
2
IM
RE
-1/N
G(jω)
PID Gp
r(t) c(t)
-
tabla de parámetros
variables características
[ ]NMX
=4
1π

Tema: Acciones Básicas de Control - 14
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Controladores PID adaptables
üModelo de referencia (MRAC)
q la clave es diseñar el algoritmo de ajuste (corrección proporcional al error cuadrático del modelo, BP con ANN,...)
ü Autosintoníaq a requerimientoq cada período de muestreo
PID Gp
r(t) c(t)
-
algoritmo de ajuste
error del modelo
Modelo-
PID Gp
r(t) c(t)
-
diseño del control
Estimador

Tema: Acciones Básicas de Control - 15
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Controladores en cascada
Ø la salida del controlador 1 se emplea como referencia del controlador 2
Ø se utilizan para mejorar el rechazo a perturbaciones del lazo
ü características:q p2(t) y ∆ganancia deben poder corregirse sin afectar al
lazo primarioq cada controlador tiene su propio punto de medidaq sólo el controlador externo tiene su SP libre
ü procedimiento de sintoníaq desde los lazos interiores hacia afueraq si un lazo interior se pasa a manual, también los
exteriores
Gp2
r(t) c(t)
-
Gp1Gc1 Gc2
-
p2(t) p1(t)

Tema: Acciones Básicas de Control - 16
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Controladores en cascada
Ø Ejemplo:ü control de temperatura en caldera
agua fría
agua caliente
TT
FC TCSP
fuelaire
fuelr(t) c(t)
-
CALDERAtemp caudal
-
p2(t)

Tema: Acciones Básicas de Control - 17
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Lazos Feedforward
ü hay casos en los cuales las perturbaciones se miden pero no se manipulan
ü se emplea @ procesosq rangos reducidos de funcionamiento (f)
ü no modifica la sintonía de los reguladores pre-existentes
[ ]
[ ]{ }
C G P G E
E R G P C
C G P G R G P C
G P G G R G G G P G G CC G G RG G PG G G
CRG G
G GPG G G
G G
GG
P
= +
= − −
∴ = + − −
= + − −∴ + = − −
∴ =+
−−
+
=
2 1
0
2 1 0
2 2 1 2 1 0 2 1
2 1 2 1 2 0 1
2 1
2 1
2 0 1
2 1
01
1 1
11
11
...( ) ( )
( )
si se consigue se elimina
r(t) c(t)G1 G2
-
p (t)
G0+-

Tema: Acciones Básicas de Control - 18
Cátedra de Sistemas de Control-Facultad de Ingeniería-UNCPBA
SC ÁREA DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
U.N.C.P.B.A.
Lazos Feedforward
Ø Ejemplo:
temp. agua caliente
fuelr(t)
CALDERAregulador
tempregulador
caudal
p (t)
+
FFC
agua fría
agua caliente
TT
TCSP
FC
fuelaire
+
FFC
FT
FT


![Joint Inpainting of RGB and Depth Images by Generative ...hvrl.ics.keio.ac.jp/hachiuma/poster_fujii_final.pdf · •Inpainting using pixels in the image [3] ØNo need of other camera](https://img.dokumen.tips/doc/110x75/6013cc645e8175529c42d16f/joint-inpainting-of-rgb-and-depth-images-by-generative-hvrlicskeioacjphachiumaposterfujiifinalpdf.jpg)


























