Embed Size (px)
Citation preview

Geophys. J . Znt. (1991) 104, 307-317
Simultaneous estimation of the gravity field and sea surface topography from satellite altimeter data by least-squares collocation
Per Knudsen Geodetic-Seismic Division, Kort-og Matrikelstyrelsen (National Survey and Cadastre), Rentemestervej 8, DK-2400 Kbbenhavn, Denmark
Accepted 1990 August 20. Received 1990 August 20; in original form 1989 August 21
SUMMARY The signal content of Seasat altimeter data is evaluated with respect to magnitude and wavelength. Based on this information covariance functions associated with the different signals/errors have been determined. The covariance function associated with the sea surface heights contains covariances associated with the geoid, the stationary sea surface topography, and the time-varying sea surface topography. These three components have been estimated from Seasat altimeter data in the Faeroe Islands region using least-squares collocation. In the solution error covari- ances associated with errors in the orbits, corrections for instrumental, atmos- pherical, and tidal effects, and sea state related bias are taken into account. The accuracies of the solutions are evaluated by computing error estimates and error correlations. A special effort has been made to evaluate the correlations between the estimated geoid and the other signals/errors. The results show that geoid undulations may be estimated with an accuracy of 0.13-0.16 m. Approximately 50 per cent of the error variance has a long-wavelength signature, which is mainly correlated with errors in the estimation of the permanent sea surface topography. The short-wavelength part of the error is mainly correlated with errors due to liquid water in rain and clouds. Free air gravity anomalies may be estimated with an accuracy of 8.8-11.7 X low5 m s-'. This error has a short-wavelength signature which is mainly correlated with errors due to liquid water in rain and clouds. However, a comparison with gravity observations resulted in an agreement of 7.8 x m s-'. Both the permanent and the time-varying sea surface topography may be estimated with accuracies of about 0.21 m.
Key words: collocation, Seasat altimetry, signal/error covariance functions.
1 INTRODUCTION
Satellite altimeter data have provided a large source of information, which is extremely valuable in studies of the Earth's gravity field and the dynamics of the oceans. The use of altimeter data for determinations of the gravity field in local areas has widely been done in two steps, where the first step is a crossover adjustment. In the second step gravity field related quantities are estimated from the crossover adjusted altimeter data, assuming that these data may be treated as geoid height observations (see e.g. Rapp 1983). Consequently the purpose of a crossover adjustment is to remove the non-gravimetric signals including various errors from the altimeter data. Using Seasat altimeter data a crossover adjustment was carried out by Rowlands (1981) in order to diminish radial orbit errors. This was done in large regions (North Atlantic Ocean, South Atlantic Ocean etc.)
by estimating bias/tilt parameters for each track and resulted in a reduction of the crossover discrepancies from 1.65 to 0.28m of the root-mean-square value (RMS). An additional crossover adjustment (bias only) on a local scale was carried out by Knudsen (1987a) in the Faeroe Islands region (60" < 4 < 65", -15" < 1 < OO), bringing the crossover discrepancies down from 0.18 to 0.12m (RMS). Some non-gravimetric effects have a relatively short-wavelength character and are not well modelled by a straight line, which the dependency of the size of the area on the results of the crossover adjustments also shows, a straight line approxima- tion becomes better for shorter arc segments. Some of these problems are discussed in Knudsen (1987c), where a method for adjusting altimetry from crossover differences using covariance relations between the time-varying components is described. Using this method time-varying components of various wavelengths may be estimated independently of the
307

308 P. Knudsen
lengths of the arc segments in the local area. A covariance function associated with the non-gravimetric signals, however, is still needed.
The dynamics of the oceans may be studied from satellite altimeter data by evaluating the induced sea surface topography. Variations in ocean currents (eddies) have been studied by Menard (1983) from colinear tracks. In the Gulf Stream area changes in the sea surface topography of 20 cm and wavelengths of 100-900 km were found. Studies of the Antarctic circumpolar current have been carried out by Fu & Chelton (1985) using crossover differences. However, the stationary parts of the sea surface topography can be studied from altimeter data only to an extent, where the gravimetric geoid is known. This was done by Engelis (1985) in a global study using Seasat altimetry and a geopotential model to harmonic degree and order 6.
Since signals associated with both the geoid and the sea surface topography are present in altimeter data together with various errors (see next section), an estimation of one of these quantities will depend on an estimation of the other quantities. Therefore the full signal and error content should be modelled simultaneously in order to obtain an optimal solution. Using a global distribution of altimeter data a joint recovery of the gravity field, the permanent sea surface topography, and radial orbit errors have been tested by Wagner (1986), Engelis (1988), Marsh et al. (1989), Tapley et al. (1988), Engelis & Knudsen (1989), and Denker & Rapp (1990). The results show that the error of the estimated quantities may reduce to 0.1-0.2 m, but observations in e.g. continental shelf areas and areas with invalid ocean tide models have not been used in these solutions. Furthermore the high-frequency parts of the gravity field and the time-varying sea surface topography have not been modelled. An estimation of the high- frequency parts of the gravity field and the time-varying sea surface topography may be estimated in local areas by least-squares collocation.
A one-step solution for obtaining sea surface heights from altimeter data has been applied by Wunxh & Zlotnicki (1984) in a study of the accuracy of altimetric surfaces. They used collocation taking orbit errors into account in order to obtain proper error estimates of the results. In Tscherning & Knudsen (1986) gravity field related quantities have been estimated from Seasat and Geos-3 altimeter data using collocation with parameters in order to estimate biases simultaneously. Recently Mazzega & Houry (1989) ex- tended the work of Wunsch & Zlotnicki (1984) and computed a one-step solution taking geoid up to harmonic degree 120, permanent sea surface topography, time-varying sea surface topography, and orbit errors into account. A simultaneous estimation of the full spectrum of the gravity field, the sea surface topography, and the errors in altimetry still has to be tested.
In this paper a one-step procedure for estimating the gravity field and sea surface topography simultaneously from satellite altimeter data is considered. The solution is obtained using least-squares collocation, which permit the various errors to be taken into account as correlated errors. Such errors may appear as biases or tilts of altimetric surfaces (see discussion in Arabelos, Knudsen & Tscherning 1987).
The construction of the covariance functions associated
with the various signals or errors is based on results from an evaluation of the accuracy of Seasat altimetry. Using these covariance functions a one-step solution is computed and the gravity field and sea surface topography are estimated in the Faeroe Islands region. The accuracy of the estimated gravity field is evaluated by computing u posteriori error covariance functions associated with geoid heights and gravity anomalies. Finally error correlations between signals and errors are computed in order to find the major sources of the errors of the estimated quantities.
2 THE ACCURACY OF SEASAT ALTIMETER DATA
A Seasat altimeter derived observation of the sea surface height, h, corrected for instrumental, atmospherical, and tidal effects and sea state related bias, may be described by
h ” = h + & (1)
where E is the error of the observation: & = &O + &i + &W - &d‘ + &iO + &’W
+ E~~~ + E~ + &Or + eCT + n and EO is the orbit error caused by drag, solar radiation pressure, station location, and errors in the geopotential model, E~ is the instrument error, E~ is the error in correction for wet troposphere, E~~ is the error in correction for dry troposphere, E~~ is the error in correction for ionosphere, Elw is the error due to liquid water, E~~~ is the error in correction for sea state related bias, E~ is the error in correction for barometer effects, &Or is the error in correction for ocean tides, ees is the error in correction for Earth tides, and n is the measurement noise. The accuracy of such sea surface heights have been evaluated by Tapley, Born & Parke (1982). In Table 1 estimates of magnitudes and wavelengths of the residual effects due to the different phenomena are listed. The dominant contribution to the error of the sea surface heights comes from inaccuracies in the orbit. The radial orbit error is predominantly long wavelength, being characterized by a once per revolution signature. The major source of the error is caused by inaccuracies in the model for the Earth’s gravity field with additional errors introduced by inadequacies in the drag and solar radiation pressure models. Also the error in the instrument corrections has a long wavelength signature.
Table 1. Error budget of Seasat altimeter data derived sea surface heights corrected for tidal effects (from Tapley et ul. 1982). Phenomena Magnitude [cml Wavelength [kml
Orbit error Drag, solar
pressure Time tag Wet troposphere Dry troposphere Ionosphere Clouds, rain Wave height Atmospheric
pressure Ocean tide Earth tide Measuring noise
140
45 5 3 0.7 3
10-100 2 % swn
3 10
2 5
40000
10000 20000 50-500 1000
50-10000 30-50
500-1000
200-1000 500-1000 20000

Seasat altimetry 309
The 5cm error corresponds to a 2ms timing error. The atmospheric corrections are separated into corrections for wet and dry troposphere effects caused by water vapour and other gases, and a correction for free electrons in the ionosphere. The errors in these corrections are quite small, but the effect of liquid water in clouds and rain may be considerable.
Sea state related bias is caused by the height and the form of the ocean waves. The effect occurs because more energy is returned from the wave trough than from the peak. Furthermore the ocean waves have a skewed distribution and the receiver pulse is not exactly Gaussian. The accuracy of a correction for these effects is 2 per cent of the significant waveheight (SWH). The inverse barometer correction was based on a direct proportionality between changes in the sea surface and changes in the surface atmospheric pressure. The correction for Earth tide did not include the permanent deformation of the Earth or ocean loading effects. The accuracy of the correction for ocean tide is on the order of lOcm, but it is not well determined in areas without tide gauges.
The Seasat altimeter data provided by the Ohio State University were adjusted by Rowlands (1981), who also removed the effect of the permanent deformation due to Earth tide. Furthermore the data were corrected for sea state related bias (7 per cent of SWH) and the noise terms associated with the data were modified with the 2 per cent SWH error. After the crossover adjustment the RMS value of the crossover discrepancies decreased to 0.28 m, but this does not mean that the accuracy of the orbits has been improved equivalently, because the orbit errors are known to be geographically correlated (Anderle & Hoskin 1977). Estimates for the accuracy of crossover adjusted altimeter data are not easily given, because the method assumes that the orbit errors are uncorrelated between tracks and with geographic position. Consequently the method does not provide proper error estimates (discussed in Wunsch & Zlotnicki 1984).
3 SIMULTANEOUS ESTIMATION OF THE GRAVITY FIELD A N D SEA SURFACE TOPOGRAPHY The sea surface height, h, may be described as the sum of the geoid, N, the permanent sea surface topography, t, and the time-varying sea surface topography, A t . Then using equation (1) an altimetric observation of the sea surface height at a point P ( 4 , I) at time t is
ha = N + f + A( + E. (3)
Since the geoid is associated with the anomalous gravity potential field of the Earth, T , relative to a geodetic reference system, gravity field related quantities may be estimated from altimeter data (equation 3). This may be done using least-squares collocation (Moritz 1980):
x = C:(C + D)-'y (4)
where C and D are matrices containing the signal covariance values C,, and the error covariance values DEE respectively between the observations y. x is the estimated quantity and the vector c, contains the covariance values C,, between the estimated quantity and the observations.
No correlations are assumed to exist between h and E,
and furthermore no correlations are assumed to exist between the components in h and between the components in E. Then
and
where D, are the covariance values associated with the error components in equation (2).
The assumptions of no correlations between the gravity field and the time-varying sea surface topography and between the gravity field and the orbit errors may not be correct. The gravity field is strongly correlated with the Ocean bottom topography (Knudsen 1988) and the variability of the ocean surface also seems to be correlated with the Ocean bottom topography (Colton & Chase 1983). No parameters, however, of sufficient quality have been found that would allow this dependency to be taken into account. Parts of the orbit errors are caused by inaccuracies in the geopotential model that has been used for the determination of the orbits. The errors depend on the global distribution of these inaccuracies and should therefore be treated in global studies (see e.g. Engelis & Knudsen 1989). In this study correlations between orbit errors and the gravity field in the local area are ignored.
A posteriori variances of the estimated quantities and error correlations may be obtained using the expression for the a posteriori error covariance between two estimated quantities, x and x', which is
(7) The description of this estimation technique in Moritz (1980) is related to problems in physical geodesy. Alternative descriptions have been used in Wunsch & Zlotnicki (1984) and in Mazzega & Houry (1989), but the estimation techniques used by these authors are equivalent to the one described above. Important differences, however, occur in the modelling of the a priori covariance functions.
4 MODELLING OF THE SIGNAL AND THE ERROR COVARIANCE FUNCTIONS
The modelling of the covariance function associated with the geoid was carried out by adjusting a degree variance model, so covariance values calculated on the surface of a sphere with radius R, as a sum of a series of Legendre's polynomials, 4, multiplied by the degree variances, a,, fit empirical covariance values (see Knudsen 1987b). The modelling of the covariance functions associated with the time-dependent signals/errors was not easily done, when the spatial modelling of these covariance functions should take place on a sphere as the covariance functions associated with the geoid, since no expressions that satisfy these requirements could be found.
The introduction of a time dependency was done so temporal correlations are expressed in a similar way as spatial correlations. Hence the covariance between two quantities y = ~ ( 4 , I , r = R , t ) and y ' = x ( $ ' , A', r' = R , t ' ) , where x is one of the quantities in equation (2) or (3)

310 P. Knuden
(except E O ) , is expressed as follows:
Cxx(q,At)= 2 U,"PJC~S(I / J+K~A~)] , for(I/J+KxAf)Sn,
for (I/J + K ~ A ~ ) > 11,
m
i-0
= 0, (8)
where q is the spherical distance between the two points and At = ( t - f'l. Then using equations (8) covariance values between quantities y and y ' may be obtained, if the degree variances associated with x and the conversion factor K~ are known. The sum of the degree variances is finite and, furthermore, the degree variances are non-negative, so the covariance function C,, (equation 8) and a covariance matrix obtained using this covariance function are positive definite (Moritz 1980).
In the modelling of the covariance functions associated with the geoid local empirical covariance values calculated from gravity anomalies and crossover-adjusted Seasat altimeter data in the Faeroe Islands Region were used (Knudsen 1987b). The geopotential model GPM2 (Wenzel 1985) to harmonic degree and order 180 had been subtracted from all the observations. Then the parameters in a Tscherning/Rapp model (Tscherning & Rapp 1974) and a scale factor was estimated using a least-squares iterative inversion technique (Knudsen 1987b). The scale factor was introduced in order to scale the error degree variances associated with GPM2, so they represent the quality of the model in the local area.
Since wavelengths longer than 5" may have been removed from the observations by a removal of the mean value from the observations, the error degree variances from harmonic degree 0 to 72 were set to zero (harmonic degree 72 roughly corresponds to a wavelength of 5"). Then the degree variance model above harmonic degree 72 was obtained using the estimated parameters. Below this degree the error degree variances are used unscaled up to degree 36, and between 37 and 71 a linearly decreasing scale factor is used. That is
for 36 < i 5 72,
= a&yM2/y', for 72 < i 5 180,
- - A s2(i+l)
(i - l)(i - 2)(i + 24)y2 , for 180 < i, (9)
where a = 0.34, A = 841400 m4 s - ~ , s = (R - 3060 m)/R, and R = 6.371 x lo6 m. &yPW are potential error degree variances associated with GPM2 and y is the normal gravity. Using this degree variance model (equation 9) and x N = 0, covariance values associated with the geoid are computed using equation (8). (The conversion factor is zero, since the geoid is independent of time.) Covariances between other gravity field related quantities, e.g. gravity anomalies and deflections of the vertical, may be computed using degree variance models derived from this model (equation 9) (see e.g. Tscherning 1974, 1976).
In the modelling of the covariance function associated with 4 degree variances from a harmonic expansion of Levitus permanent sea surface topography calculated by
Engelis (198%) were used. The expansion is carried out to harmonic degree and order 10, and the sum of these degree variances is (0.63m)*. The degree variances adopt maximum values at harmonic degree 2-3 and they tend very fast to zero at harmonic degree 10. Based on this information and that 4 is independent of time, a degree variance model associated with the permanent sea surface topography was constructed:
- lo3 .+- E(0.63 m, 1,4), id + i3 K' = 0" day-'
where &(a, k,, k2) is a band pass filter constructed using third degree Butterworth filters (see e.g. Mesk6 1984), which are scaled in order to obtain the correct variance:
where k , < k , are constants and the scale factor, 6, is determined so the variance d = C &(a, k,, k,) is obtained.
With respect to the time-varying sea surface topography Menard (1983) found a variability of 0.1-0.2m (RMS) associated with wavelengths of 200-2000 km in a study using Seasat altimeter data in the NW Pacific and the NW Atlantic oceans. Wavelengths longer than 2000km had been removed from the data together with orbit errors, but time-varying sea surface topography associated with these wavelengths may exist. Fu & Zlotnicki (1989) have studied the time-varying sea surface topography in the Agulhas Current region south of Africa using Geosat altimetry. They found that the power spectrum can be approximately described by a k-4 power law, where k is a wavenumber. On a sphere this corresponds to a decay of i C 3 (Knudsen 1987b). Using these results a degree variance model associated with A t was found. (The determination of the conversion factor, K, is explained below.)
lo3 u:'= (1 - m ) & . ( 0 . 6 3 m, 1,4), K ~ ' = 0.53" day-'.
(12) The determination of the conversion factor associated with A[ was done by adopting the correlation time from an empirical covariance function for AC estimated by Fu & Chelton (1985). [The correlation time is defined in a similar manner as the correlation length: the correlation length (or time) is that distance (or time difference), where the covariance is half the variance.] From their covariance function associated with a variability of 0.0-0.2 m a correlation time of 13.8 days was found [for details see equation (C10) and table C1 in Fu & Chelton (1985)l. Using this correlation time and a correlation length of CAcat; of 7.27", a conversion factor of 0.53" day-' was found.
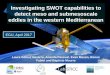
The degree variance models and the covariance functions associated with the geoid and the sea surface topography are shown in Fig. 1. The variances of the residual geoid, the permanent and the time-varying sea surface topography are (0.35 m)2, (0.63 m)' and (0.25 m)' and the correlation lengths are 0.36", 21.91" and 7.27" respectively.
Some interesting quantities associated with the sea surface topography covariance functions are the variances of the surface geostrophic ocean current velocities. In the Appendix it is shown how covariance functions associated

Seasat altimetry 31 1
- 0
' ? - 0
ro - - 0 N 9 -
i d *)
> o L Y
0
. . - -
0
0
0 . -
with the Ocean currents can be derived from the covariance functions associated with the sea surface topography assuming a non-accelerating surface layer and absence of atmospheric pressure gradients and frictional forces. This results in variances of the geostrophic Ocean current velocity associated with permanent and the time-varying sea surface topography at r$ = 45" of (0.20 m s-')' and (0.50 m-' s)' respectively.
The radial orbit error EO is mainly caused by inaccuracies in the models for the forces acting on the satellite (gravity, drag, and solar pressure) and errors in the initial elements for the orbit integration. The orbit error caused by geopotential errors is dominated by frequencies lower than 2 cycles per revolution with most of its energy concentrated around the lcyrev-' frequency (e.g. Engelis 1988). This error is independent of the orbit integration period in contrast to the orbit error caused by errors in the initial conditions for the orbit integration, which is dominated by a 1 cy rev-' frequency of constant and time-dependent amplitudes. Hence covariance functions associated with orbit errors both dependent on and independent of the integration periods are needed.
A covariance function associated with the orbit error caused by geopotential errors may be obtained using Fourier techniques and the power spectrum of the error. Estimates of the power spectrum may be obtained from studies of changes in the radial distance caused by changes in the geopotential model or directly from the covariance matrix associated with the geopotential model (e.g. Tapley & Rosborough 1985; Rosborough 1986; Engelis 1987; Schrama
.---..._.. - - - - - _ - _ _ _ - _
. . - - ..- _ - - _ _ _ _ _ _ _ _ - _ _
- 3 < + A <
- h
- - -
_ _ . _
I I / , l I I I I I
1989). A covariance function associated with the initial condition related orbit error may be obtained in a similar manner using the power spectrum of this error. Errors due to initial conditions of different orbit integration periods should be treated as uncorrelated.
The procedure sketched above has not been carried out prior to this study, since it was felt that the available information about the original Seasat orbits was too sparse. Instead the covariance function expression used by Wunsch & Zlotnicki (1984) and by Mazzega & Houry (1989) was used. It is
Dl(At) = aoao' cos (ao At) exp (-At' A d ) , (13) where aoao' = (1.47 m)', wo = 2n/T, and Am = 2n/24T, where T is the period of one revolution (approximately 6OOO s for Seasat). The AOJ value was arbitrarily assumed by Wunsch & Zlotnicki to avoid singularities. However, the exponentially damped cosine has a power spectrum equal to a Gaussian function shifted to the 1 cy rev-' frequency (Bracewell 1978), which is a more reasonable spectrum for the orbit error (but probably still too simple) than a spectrum consisting of a spike at the 1 cy rev-' frequency only. The instrument error has also a very long wavelength signature (Table 1) and is assumed to be included in equation (13).
The covariance functions associated with the remaining errors in equation (2) are modelled using &(.(a, k , , kz), equation ( l l ) , as degree variance models, where the constants u, k , , and k, are obtained from Table 1. The harmonic degrees (k) were derived from the wavelengths (A') using the relation k = 40 OOO/A'. As magnitude of the 2 per cent SWH error E~~~ = 0.10 m is used, but the product of the actual 2 per cent SWH may be used alternatively. The minimum magnitude of 0.10m of the errors due to liquid water in rain and clouds are used, assuming that larger effects are avoided by deleting observations with a noise greater than 0.10m. The errors in the corrections for dry troposphere effects E ~ * are very small (<0.01m) and have been ignored.
The conversion factors K' were determined iteratively using the following characteristics about the behaviour in time of the respective errors sources: the variations in the effects due to the wet troposphere, the ionosphere, and the atmospheric pressure are mainly diurnal. However, the wet troposphere may vary faster depending on the weather conditions. Earth and ocean tide have a predominant semi-diurnal, but also a diurnal variation. The wave height and the atmospheric pressure changes together with the weather conditions on a time-scale between perhaps some hours and one week. The content of liquid water in rain and clouds may vary diurnally, but can also change within a few hours in case of showers. In Table 2 the conversion factors are listed together with correlation distances and correlation times for the error covariance functions associated with Seasat altimetry. Notice the different characteristics in time. The geoid and the permanent sea surface topography are stationary in time. The time-varying sea surface topography is correlated within about 2 weeks, and the errors decorrelate after less than one third of a day.
In a coastal area the presence of islands or land interrupting a sequence of measurements may cause problems. The ocean tide models may be inaccurate with

312 P. Knuhen
Table 2. The parameters a(m), k , , and k , in the degree variance model &(a, k , , k2) , equation (1 l) , conversion factors K'(' day-'), the correlations lengths E('), and correlation times &(days) for covariance functions as- sociated with x .
E K ~ 0 . 0 3 8 0 8 0 0 0 . 5 5 0 . 1 3 0.25 n . 0 3 4 8 n o 1 . 1 2 0.14 0 . 1 3
, I w 0 . 1 0 8 0 0 1 3 3 3 1 . 5 8 0 . 0 6 0 . 0 4 ,swh 0 . 1 0 4 0 8 0 2 . 8 9 0 . 8 8 0 . 3 0 E IJ 0 . 0 3 4 0 2 0 0 1.54 0 . 4 5 0 . 2 9
E e T 0 . 0 2 1 3 2 4 0 . 0 0 2 3 . 0 0 0 . 1 0
X 0 kl k ? K X 5 Ct
~0~ 0 . 1 0 4 0 a n 9.00 0.88 0 . 1 0
different errors on each side of the land. Furthermore the weather conditions may change drastically across the land. Therefore it is important to take such effects into account. This may be done by setting a covariance value equal to zero, if the two points are located on each side of the land. This should be done to covariance values associated with E ~ ' , &Iw, E ~ ~ ~ , eb, and &Or. Such truncations may risk damaging the positive definitenesses of the covariance functions, but in practice the covariance matrices still may be positive definite (Sanso & Schuh 1987).
In the next section the one-step solution described in the previous section using the set of covariance. functions described in this section, is tested in the Faeroe Islands region using Seasat altimeter data. A computer program has been developed for the task. In this program covariance values are obtained accurately by third-degree polynomial interpolations in covariance function tables containing precomputed coefficients. Each covariance value is comp- uted as a sum of the series, equation (8), truncated at harmonic degree 4000. Harmonic degree 4000 corresponds roughly to a wavelength of 10 km, which is far below the 32 km resolution of the Seasat altimeter data (Marks & Sailor 1986). However, the covariance function associated with the orbit error is evaluated explicitly using equation (13). The solution is calculated using the Cholesky method, as implemented in the subroutine NES (Poder & Tscherning 1973).
5 RESULTS USING SEASAT ALTIMETER DATA IN THE FAEROE ISLANDS REGION
The method described in the previous sections was tested in the Faeroe Islands region (60" < $J < 65", -15 < A < 0") using Seasat altimeter data. In this area 6156 altimeter data were found. In order to reduce the number of observations, a selection procedure was applied. A procedure selecting one observation in cells covering the area in order to obtain equally spaced observations could not be used, since repeat observations, or observations located very closely at different times, are important when quantities depending on time are estimated. Therefore it was decided to select a fraction of data at equal time intervals. Results obtained by Marks & Sailor (1986) show that the resolution of Seasat altimeter data is about 32 km, which corresponds to time interval of about 4.8s along the satellites groundtrack. Considering this wavelength, a spacing between 2 and 3 s should be used. A spacing of 3 s was used, since this spacing would yield the best recovery of errors due to liquid water in rain and clouds. This was determined regarding the covariance function associated with &Iw, because it has the
shortest correlation length. A spacing of 2 s or 13.4 km will coincide with the first zero point of the covariance function, which will leave neighbouring observations apparently uncorrelated. In contrast a spacing of 3 s or 20.1 km will coincide with the point of maximum negative correlation. In order to eliminate gross errors, observations having a noise greater than 0.10 m were disregarded in the selection. The selection resulted in 1605 observations (see Fig. 2).
From the selected observations the contributions from the harmonic expansion GPM2 were subtracted. Furthermore the observations were transformed into a reference system having an ellipsoid with a semi-major axis a = aGRSBO- 0.869m. An ellipsoid with this semi-major axis is obtained using the results in Engelis & Knudsen (1989), where a bias in GRS8O is estimated in a global study of Seasat altimeter data. Then a mean value and a standard deviation of -0.942 and 0.340111 of the reduced observations were found. However, this mean value may contain geographically correlated orbit errors in the original Seasat orbits.
Then a solution was obtained, equation (4), with x = ha - n in all the selected observation points. The mean value and the standard deviation of the estimated quantities were -0.942 and 0.334 m. These values agree well with the values for the observations, and very small residuals ha - x having a mean of 0.000m and a standard deviation of 0.018 m, were obtained. In order to study the magnitude of each component contained in the observations, each of these components was estimated at the same points as the observations. The RMS values, the mean values, and the standard deviations of the estimated quantities are listed in Table 3. The results listed in Table 3 show that the mean sea surface N + [ is almost modelled by a constant bias associated with the permanent sea surface topography, superimposed by geoid height undulations. As well as the mean value of the observations, the estimated 5 may contain correlated orbit errors. The estimated time-varying sea surface topography Ag' has apparently adopted a part of the mean sea surface, since its mean value is different from zero.
The magnitudes of the estimated errors associated with the orbit EO, liquid water dW, wave height E ~ ~ ~ , and ocean tide range from 0.040 to 0.116m. The remaining error components have very small RMS values (50.003m). The RMS values of the estimated errors due to wet troposphere E", ionosphere do, atmospheric pressure E ~ , and Earth tide
are about 10 per cent (or less) of the a priori standard deviations (Table 2). Therefore a modelling of these negligible effects may be omitted in future studies using Seasat altimeter data.
In order to evaluate the estimated gravity field, free air anomalies were computed, because such quantities may be compared with gravity observations. A comparison with 221 gravity observations resulted in an RMS value of 7.8 X lOV5m s-*. This value is slightly higher than the RMS value of 6.8 X lo-' m s-* found by Knudsen (1987~) using collocation and locally crossover adjusted altimeter data. However, the area was not identical to the area used in this study. In Fig. 3 the estimated free air anomalies are shown.
From estimates of A t , a sea surface variability map has been produced (Fig. 4). At each point the variability was computed as the RMS value of Ag' computed at different times. The map shows variabilities ranging from 0.03 to

Seasat altimetry 313
Figure 2. Location of the 1605 selected Seasat altimeter data in the Faeroe Islands region ( x ) and the points P (0) and Q (+ ) used in the error analysis.
0.09m (RMS). A weak correlation with the bathymetry seems to be present, since large variabilities are found over the ridge between the Faeroe Islands and Iceland. Time series of sea level anomalies may be constructed for interesting comparisons with tide gauge observations. However, this has not been done, since no available tide gauge data have been collected.
An error analysis of the estimated geoid has been carried out by computing error estimates and error correlations using equation (7). It was done at five points located on a profile across a diamond shape formed by the satellite groundtracks (points P in Fig. 2), in order to obtain minimum and maximum errors. The estimated errors range
Table 3. Mean (m), standard deviation (rn), and RMS (m) of observations, ha, modelled observations, x , the residuals, ha - x , and the different components.
x M e a n St .dev R V S
ha - 0 . 9 4 2 0 . 3 4 0 1 .001 X - 0 . 9 4 2 0 . 3 3 4 0.999 h a - x 0 .000 0 . 0 1 8 0.018
N - 0 . 0 2 3 5 - 0 . 8 4 9 A 5 - 0 . 0 4 6 €0 - 0 . 0 3 2 E W t 0 . 0 0 1 € 1 0 0 . 0 0 1 € 1 W 0 . 0 1 1 € s w h 0 . 0 0 6 c b 0 . 0 0 1 € O K 0 . 0 0 4 € e K 0 . 0 0 0
- 0 . 2 9 0 0,007 0 . 0 5 8 0 . 1 1 2 0 . 0 0 3 0 . 0 0 3 0 . 0 4 4 0 . 0 4 0 0 . 0 0 3 0 .040 0.000
0 . 2 9 1 0 . 8 4 9 0 . 0 7 3 0 . 1 1 6 0 .003 0.003 0 . 0 4 5 0 . 0 4 0 0 . 0 0 3 0 .040 0.000
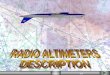
from 0.13 to 0.16 m. In order to evaluate the nature of these errors, error covariances were calculated between these five points and points located on the profile (points Q in Fig. 2). The five error covariance functions (see Fig. 5 ) show that the errors in the different points are correlated. Almost half of the errors have a long-wavelength correlation and the other parts of the errors have a short-wavelength correlation. Sources to these long- and short-wavelength errors may be found by evaluating the error correlations between the error of an estimated geoid height and errors of estimates of the other signals/errors. Such error covariances and error correlation coefficients computed at the easternmost point are listed in Table 4. The largest correlation coefficients are found between N and f and between the N and &Iw. Minor correlations are found with A(, E ~ ~ ~ , and EO’. Hence the error of the estimated f is the main contributor to the long-wavelength error of the estimated geoid and is the main contributor to the short-wavelength error. A similar error analysis has been carried out for free air gravity anomalies estimated in the same five points as used above. The estimated errors range from 8.8 X lo-’ to 11.7 x m s-’ and are hereby larger than the result from the empirical test against gravity observations. The five estimated error covariance functions (Fig. 6) show that only the short-wavelength correlations are present. The estimated error correlation coefficients (Table 5 ) show a large correlation with &Iw only and minor correlations with E~~~ and &Or. This error &Iw accounts for nearly half of the free air anomaly error. The a priori

314 P. Knudsen
F l p e 3. Free air gravity anomalies estimated from Seasat altimeter data. CI 5 X lo-’ m s-’
standard deviation of &Iw may have been too large, because the error of AS; is 0.21 m, which is about three times larger the a posteriori RMS value (Table 3) is half of that value than the estimated variability. Due to this fact, the only. The relatively high error estimates may be caused by estimation of this component is uncertain. this also. The values in Table 4 or 5 show the estimated
6 CONCLUSIONS error of the permanent and also the time-varying sea surface topography. The error of is 0.21m, which is correlated with the long-wavelength error in the estimated geoid The method described in this paper for simultaneous according to the error analysis of the estimated geoid. Also estimation of the gravity field and sea surface topography
Figure 4. Variability of time-varying sea surface topography. CI 0.01 m.

Seasat altimetry 315
0 1 I I
C . C C C . L > 0.bC 0 . 1 5 1 .CO L .L5 i .bC I . I 5 2 . C 0
P S I f O E C l
Figure 5. Error covariance functions for five estimated geoid heights.
Table 4. Errors, &;.(m), error covariances, c ,.(m2), and error correlation coefficients, iNX., between an estimated geoid height, N, and the other signals/errors, x ’ . a,.,= 0.13m. h
0.207 - .0068 -0 .247 0 .210 - . 0 0 3 8 -0 .135
7 A 3 €0 0.235 -. 0008 € W t 0 .030 - . 0 0 0 2 -0 .057 E 10 0.030 - .0002 -0 .054 € 1 W 0 .077 - .0026 -0 .248 ,swh 0 .085 - .0012 -0 .102
€07 0 . 0 8 5 - . 0 0 1 2 -0 .103 E e T 0.020 - . o o o o - 0 . 0 0 0
X U X ’ C N x ‘ , % x ’
-0 .027
E b 0.030 - .0002 -0.042
0
0
0
- 4 - I
c cc c ‘5 c 3c 0 I5 L co , L5 L bC L 15 2 LO
Figure 6. Error covariance functions for five estimated free air anomalies.
0 5 ’ ‘ C E C I
Table 5. Errors, &(m), error covariances, c^A8xr(10-5 m2 s-~), and error correlation coefficients, iAgX., between an estimated free air anomaly, Ag, and the other signals/errors, x ’ . = 9.2 x lo-’ m sK2.
0 . 2 0 7 0 .210 0 .235 0 . 0 3 0 0 .030 0 .077 0 .085 0 .030 0 .085 0 . 0 2 0
- .0068 -. 0397 - . 0 3 9 1 - . 0 2 1 7 -. 0200 - . 2 7 7 5 - . 0 7 9 7 - . 0 1 2 6 -. 0798 -. 0000
- 0 . 0 0 4 - 0 . 0 2 1 -0 .018 - 0 . 0 8 0 -0.073 -0 .394 - 0 . 1 0 2 -0.046 -0.102 - 0 . 0 0 0
has the advantage that a solution is obtained in one step. Furthermore proper error estimates are obtained, if the full signal/error content in the observations is modelled using empirical covariance functions. In this case covariance function models associated with Seasat altimeter data have been modelled on a sphere using information about the characteristic wavelengths and magnitudes. The covariance function associated with the gravity field has been estimated using empirical covariance functions and the covariance functions associated with the sea surface topography have been estimated using results from an analysis of the Levitus sea surface topography. Furthermore information about the decay of the spectrum and the correlation time associated with the time varying sea surface topography has been used.
The results show that the gravity field is estimated within the same accuracy as previously obtained. However, this may be improved, if all observations and informations about the bathymetry are used. The long-wavelength parts of the gravity field are correlated with the permanent sea surface topography, so an estimation of these long-wavelength quantities depends on the accuracy of the geopotential model that is used as reference, and the accuracy of the orbits with respect to geographically correlated errors. The estimation of the time-varying sea surface topography is quite uncertain, when observations distributed over an area of approximately 550 x 800 km2 and an interval of about 3 months are used.
Errors due to the orbit, the liquid water in rain and clouds, the significant wave height, and ocean tide are important to take into account. On the other hand errors due to wet troposphere, ionosphere, atmospheric pressure, and Earth tide are negligible and may be omitted. However, effects due to the ionosphere may be important, if, e.g. Geosat altimeter data collected in a period with increased solar activity, are used. The modelling of the errors due to liquid water in rain and clouds needs to be considered more carefully, since they appear to absorb parts of the short-wavelength gravity field. The errors may be detected as spikes during pre-processing using all observations. In that case a further modelling may be omitted.
The results obtained in this paper have shown how efficiently error signals may be estimated simultaneously by least-squares collocation. This is also important when different types of observations having different errors or biases are combined.
ACKNOWLEDGMENTS
This research is a contribution to a project supported by Norsk Hydro. The Seasat altimeter data adjusted by Rowlands were kindly provided by Professor R. H. Rapp, the Ohio State University. Parts of the gravity observations were provided by DMAAC.
REFERENCES
Anderle, R. J . & Hoskin, R. L. 1977. Correlated errors in satellite altimetry geoids, Geophys. Res. Lett., 4, 421-423.
Arabelos, D., Knudsen, P. & Tscherning, C. C., 1987. Covariance and bias treatment when combining gravimetry, altimetry, and gradiometer data by collocation, in Proceedings of the IAG Symposia, pp. 443-454, International Association of Geodesy, Paris.

316 P. Knudsen
Bracewell, R. N., 1978. The Fourier Transform and its Applications, 2nd edn, McGraw-Hill, New York.
Colton, M. T. & Chase, R. R. P., 1983. Interaction of the Antarctic circumpolar current with bottom topography: an investigation using satellite altimetry, J. geophys. Res., 88, 1825-1843.
Denker, D. & Rapp, R. H., 1990. Geodetic and oceanographic results from the analysis of one year of geosat data, 1. geophys. Res., in press.
Engelis, T., 1985. Global circulation from SEASAT altimeter data, Mar. Geod., 9, 45-69.
Engelis, T., 1987a. Radial orbit error reduction and sea surface topography determination using satellite altimetry, Report No. 377, Dept. of Geodetic Science and Surveying, The Ohio State University, Columbus, OH.
Engelis, T., 1987b. Spherical harmonic expansion of the Levitus sea surface topography, Report No. 385, Dept. of Geodetic Science and Surveying, The Ohio State University, Columbus, OH.
Engelis, T., 1988. On the simultaneous improvement of a satellite orbit and determination of sea surface topography using altimeter data, Manuscripta Geodaetica, W, 180-190.
Engelis, T. & Knudsen, P., 1989. Orbit improvement and determination of the oceanic geoid and topography from 17 days of Seasat data, Manuscripta Geodaetica, 14, 193-201.
Fu, L.-L. & Chelton, D. B., 1985. Observing large-scale temporal variability of ocean currents by satellite altimetry: With application to the Antarctic circumpolar current, J. geophys. Res., 90,4721-4739.
Fu, L.-L. & Zlotnicki, V., 1989. Observing oceanic mesoscale eddies from geosat altimetry: preliminary results, Geophys. Res. Lett., 16, 457-460.
Knudsen. P., 1987a. Simultaneous use of gravity and satellite altimeter data for geoid determination, Bull. Geod. Sci. A f . , XLVI, 1-20.
Knudsen, P., 1987b. Estimation and modelling of the local empirical covariance function using gravity and satellite altimeter data, Bull. Geod., 61, 145-160.
Knudsen, P., 1987c. Adjustment of satellite altimeter data from crossover differences using covariance relations for the time varying components represented by Gaussian functions, in Proceedings of the IAG Symposia, pp. 617-628, International Association of Geodesy, Paris.
Knudsen, P., 1988. Determination of local empirical covariance functions from terrain reduced altimeter data, Report No. 395, Dept. of Geodetic Science and Surveying, The Ohio State University, Columbus, OH.
Marks, K. S. & Sailor, R. V., 1986. Comparison of Geos-3 and Seasat altimeter resolution capabilities, Geophys. Res. Lett.,
Marsh, J. G., Lerch, F. J., Koblinsky, C. J., Klosko, S. M., Martin, T. V., Robbins, J. W., Williamson, R. G. & Patel, G. B., 1989. Dynamic sea surface topography, gravity, and improved orbit accuracies from the direct evaluation of SEASAT altimeter data, NASA Technical Memorandum 100735, Goddard Space Flight Center, Greenbelt, MD.
Mather, R. S., Lerch, F. J., Rizos, C., Masters, E. G. & Hirsch, B., 1978. Determination of some dominant parameters of the global dynamic sea surface topography from Geos-3 altimetry, NASA Technical Memorandum 79558, Goddard Space Flight Center, Greenbelt, Maryland.
Mazzega, P. & Houry, S., 1989. An experiment to invert Seasat altimetry for the Mediterranean and Black Sea mean surface, Geophys. J., 96,259-272.
Menard, Y., 1983. Observations of eddy fields in the northwest Atlantic and northwest Pacific by SEASAT altimeter data, J. geophys. Res., 88, 1853-1866.
Mesk6, A., 1984. Digital Filtering: Applications in Geophysical Exploration for Oil, Pitman Advanced Publishing Program, Pitman, London.
W, 697-700.
Moritz, H., 1980. Advanced Physical Geodesy, Herbert Wichmann Verlag, Karlsruhe.
Poder, K. & Tscherning, C. C., 1973. Cholesky's method on a computer, Internal Report No. 8, The Danish Geodetic Institute, Copenhagen.
Rapp, R. H., 1983. The determination of geoid undulations and gravity anomalies from Seasat altimeter data, J. geophys. Res.,
Rosborough, G. W., 1986. Satellite orbit perturbations due to the geopotential, Report No. CSR-86-1, Center for Space Research, The University of Texas at Austin.
Rowlands, D., 1981. The adjustment of Seasat altimeter data on a global basis for geoid and sea surface height determinations, Report No. 325, Department of Geodetic Science and Surveying, The Ohio State University, Columbus, OH.
Sanso, F. & Schuh, W. D., 1987. Finite covariance functions, Bull. Geod., 61, 331-347.
Schrama, E. J. O., The role of orbit errors in processing of satellite altimeter data, Report No. 33, Netherlands Geodetic Commission, Publications on geodesy, New series, Delft.
Tapley, B. D. & Rosborough, G. W., 1985. Geographically correlated orbit error and its effect on satellite altimetry missions, J. geophys. Res., 90, 11 817-11 831.
Tapley, B. D., Born, G. H. & Parke, M. E., 1982. The Seasat altimeter data and its accuracy assessment, 1. geophys. Res.,
Tapley, B. D., Nerem, R. S., Shum, C. K., Ries, J. C. & Yuan, D. N., 1988. Circulation from a joint gravity field solution determination of the general ocean, Geophys. Res. Lett., Is, 1109-1112.
Tscherning, C. C., 1974. A Fortran 4 program for the determination of the anomalous potential using stepwise least squares collocation, Reporr No. 212, Department of Geodetic Science and Surveying, The Ohio State University, Columbus, OH.
Tscherning, C. C., 1976. Covariance expressions for second and lower order derivatives of the anomalous potential, Report No. 225, Department of Geodetic Science and Surveying, The Ohio State University, Columbus, OH.
Tscherning, C. C. & Rapp, R. H., 1974. Closed covariance expressions for gravity anomalies, geoid undulations, and deflections of the vertical implied by anomaly degree variance models, Report No. 208, department of Geodetic Science and Surveying, The Ohio State University, Columbus, OH.
Tscherning, C. C. & Knudsen, P., 1986. Determination of bias parameters for satellite altimetry by least squares collocation in, Proceedings of the International Associations of Geodesy, pp. 833-853, Hotine-Marussi Symposium on Mathematical Geodesy, June 3-6, Rome.
Wagner, C. A., 1986. Accuracy estimates of geoid and ocean topography recovered jointly from satellite altimetry, 1. geophys. Res., 91, No. B1, 453-461.
Wenzel, H.-G., 1985. Hochaufloessende kugelfunktionsmodelle h e r das gravitationspotential der Erde, Wiss. Arb. Fachrich- tung Vermessungswesen der Universitaet Hannover, No. 137.
Wunsch, C. & Zlotnicki, V., 1984. The accuracy of altimetric surfaces, Geophys. J. R. astr. SOC., 78,795-808.
88, 1552-1562.
8'7,3179-3188.
APPENDIX
In this section it is shown how covariance functions associated with the surface geostrophic ocean current velocity can be derived from a covariance function, C,,, associated with the dynamic quasi-stationary sea surface
Assuming a non-accelerating surface layer and absence of atmospheric pressure gradients and frictional forces, the
topography, t.

velocity of surface geostrophic ocean current is expressed by (Mather et al. 1978; Engelis 1985)
where
f = 2w sin 9. (fw Then by using the analogy to the deflections of the vertical associated with the Earth's gravity field the velocity may be expressed by
where
Covariance functions associated with the sea surface topography, the x and the y components of the current velocity may then be expressed in terms of cc and qf and derived in a similar way as covariance functions associated with deflections of the vertical and geoid heights. That is