Embed Size (px)
Citation preview

SIMPAT:
Stochastic Simulation with Patterns
G. Burc Arpat
Stanford Center for Reservoir Forecasting
Stanford University, Stanford, CA 94305-2220
April 26, 2004
Abstract
Flow in a reservoir is mostly controlled by the connectivity of extreme perme-
abilities (both high and low) which are generally associated with marked, multiple-
scale geological patterns. Thus, accurate characterization of such patterns is re-
quired for successful flow performance and prediction studies.
In this paper, a new pattern-based geostatistical algorithm (SIMPAT) is proposed
that redefines reservoir characterization as an image construction problem. The
approach utilizes the training image concept of multiple-point geostatistics but
instead of exporting statistics, it infers multiple-scale geological patterns that occur
within the training image and uses these patterns as the building blocks for image
(reservoir) construction. The method works equally well with both continuous and
categorical variables while conditioning to a variety of local subsurface data such
as well logs and 3D seismic.
The paper includes the technical details of the SIMPAT algorithm and various
complex examples to demonstrate the flexibility of the approach.
1

1 Introduction
Sequential simulation is one of the most widely used stochastic imaging techniques within
the Earth Sciences. The sequential simulation idea found its first use in the traditional
variogram-based geostatistics algorithms such as sequential Gaussian simulation (SGSIM)
and sequential indicator simulation (SISIM) as described in Deutsch and Journel (1998).
In the early nineties, multiple-point geostatistics introduced the training image concept
proposing to replace the variogram with the training image within an extended sequential
simulation framework (Guardiano and Srivastava, 1993). Later, the landmark algorithm
(SNESIM) of Strebelle (2000) made the use of multiple-point geostatistics practical for
real reservoirs (Caers et al., 2003; Strebelle et al., 2002).
In this paper, a different approach to the use of training images within the extended
sequential simulation framework is explored. The problem is redefined as an image
processing problem where one finds the geological patterns in a training image instead of
exporting multiple-point statistics through conditional probabilities. Once these patterns
are found, the method applies sequential simulation such that, during the simulation, a
local pattern similarity criterion is honored instead of local conditional distributions.
The method accounts for multiple-scale interactions of geological patterns through a new
multiple-grid approach where the scale relations are tightly coupled (See Tran (1994) for
the details of the traditional multiple-grid method). The same algorithm works equally
well both with categorical and continous variables such as facies and permeability while
conditioning to a variety of local subsurface data such as well logs and 3D seismic.
This algorithm is named SIMPAT (SIMulation with PATterns). For a discussion about
the general philosophy of the basic algorithm, the reader is referred to Caers and Arpat
(2004). This paper is intended to document the technical details of SIMPAT. The paper
first introduces a formal notation for the proposed algorithm (Section 2). Then, a detailed
discussion of the SIMPAT algorithm using this notation is given (Section 3). This section is
followed by the results section where several examples are discussed (Section 4). Finally,
future work plans about the algorithm are laid out in Section 5.
2

2 Notation
For clarity, this section introduces the required notation for explaining the SIMPAT al-
gorithm on a binary (sand/non-sand) case. The extension to multiple-categories and
continuous variables are discussed later in Section 3.1.1.
2.1 Grids and Templates
Define i(u) as a realization of an indicator variable I(u) modeling the occurrence of
a binary event (For example, a model for the spatial distribution of two facies, e.g.
sand/non-sand):
i(u) =
1 if at u the event occurs (sand)
0 if at u the event does not occur (non-sand)(1)
where u = (x, y, z) ∈ G and G is the regular Cartesian grid discretizing the field of
study. When node u of i is unknown or missing, it is denoted by i(u) = χ.
iT(u) indicates a specific multiple-point event of indicator values within a template
T centered at u; i.e., iT(u) is the vector:
iT(u) = {i(u + h0), i(u + h1), i(u + h2), . . . , i(u + hα), . . . , i(u + hnT−1)} (2)
where the hα vectors are the vectors defining the geometry of the nT nodes of template
T and α = 0, . . . , nT − 1. The vector h0 = 0 identifies the central location u.
To distinguish the realization (the simulation grid), the training image, the primary
data (such as well data) and the secondary data (such as seismic), the notations re, ti,
dt1 and dt2 are used in place of i. For example,
tiT(u′) = {ti(u′ + h0), ti(u′ + h1), ti(u
′ + h2), . . . , ti(u′ + hα), . . . , ti(u′ + hnT−1)} (3)
denotes a multiple-point event scanned from the training image ti at location u′ and
u′ ∈ G′ where G′ is the regular Cartesian grid discretizing the training image. Notice
that, the training image grid G′ need not be the same as the simulation grid G.
3

2.2 Patterns
A pattern patkT is the particular k-th configuration of the previous vector of indicator val-
ues tiT(u′) of the training image ti, with each indicator value now denoted by patkT(hα),
where k = 0, . . . , npatT− 1 and npat
Tis the number of total available patterns in the
pattern database associated with the training image ti.
The pattern geometry is again defined by a template T containing nT nodes with the
vectors hα where α = 0, . . . , nT − 1. That configuration is location-independent, hence
the definition of a particular pattern is itself location-independent. Thus:
patkT(hα) =
1 if at the α-th template location hα the event occurs (sand)
0 if at the location hα the event does not occur (non-sand)(4)
Different from iT (u) defined in Eq. (1), a pattern patkT cannot have unknown/missing
nodes as patterns are extracted from the training image ti and the training image is
always fully known by definition. The k-th pattern is then defined by the vector patkT of
nT binary indicator values:
patkT = {patkT(h0), patkT(h1), patkT(h2), . . . , patkT(hα), . . . , patkT(hnT−1)} (5)
where k = 0, . . . , npatT− 1. All npat
Tpatterns are defined on the same template T.
In any finite training image ti, there is a finite maximum number of ntipat
Tpatterns
that can be extracted which are defined over a template T. A filter can be applied to
discard patterns with undesirable characteristics to reach the final smaller npatT
count.
Therefore, the final number (npatT) of patterns retained might be smaller than nti
patT.
2.3 Data Events
A data event devT(u) is defined as the vector of indicator values,
devT(u) = {devT(u + h0), devT(u + h1), . . . , devT(u + hα), . . . , devT(u + hnT−1)} (6)
with devT(u + hα) = re(u + hα) where re is the realization (simulation grid) indicator
function as previously defined in Section (2.1). In other words, devT(u) = reT(u).
4

2.4 Similarity
d 〈x,y〉 is used to denote a generic dissimilarity (distance) function. The vector entries
x and y can be patterns or data events. Ideally, d 〈x,y〉 should satisfy the conditions:
1. d 〈x,y〉 ≥ 0,
2. d 〈x,y〉 = 0 only if x = y,
3. d 〈x,y〉 = d 〈y,x〉
4. d 〈x, z〉 ≤ d 〈x,y〉 + d 〈y, z〉
In practice the last two conditions, which are required to make d 〈x,y〉 a metric, are
sometimes relaxed for certain distance functions.
A commonly used distance function is the Minkowski metric (Duda et al., 2001).
Applied to the case of d 〈x,y〉 for a data event and a pattern, one has,
d⟨devT(u),patk
T
⟩=
(nT−1∑
α=0
∣∣∣devT(u + hα) − patkT(hα)∣∣∣q
)1/q
(7)
where q ≥ 1 is a selectable parameter. Setting q = 2 gives the familiar Euclidean distance
while setting q = 1 gives the Manhattan or the “city block” distance.
The entries of d 〈x,y〉, vectors x and y might contain unknown/missing components.
For example, a data event devT(u) may have unknown nodes. In such a case, these
missing components are not used in the distance calculations, i.e. if u + hα is unknown,
the node α is skipped during the summation such that:
d⟨devT(u),patk
T
⟩=
(nT∑
α=0
dα
⟨devT(u + hα), patkT(hα)
⟩ )1/q
(8)
and,
dα 〈xα, yα〉 =
|xα − yα|q if xα and yα are both known, i.e. 6= χ
0 if either xα or yα is unknown/missing(9)
The above expression prevents the node hα from contributing to the similarity calcu-
lation if it contains an unknown/missing value in either one of the entires of dα 〈xα, yα〉.
5

2.5 Multiple-grids
On a Cartesian grid, the multiple-grid view of a grid G is defined by a set of cascading
coarse grids Gg and sparse templates Tg instead of a single fine grid and one large dense
template where g = 0, . . . , ng − 1 and ng is the total number of multiple-grids for grid G.
See Fig. 1 for an illustration of multiple-grid concepts.
full node
empty node
[ a ] coarse grid
fine node
coarse node
[ b ] fine grid
[ c ] coarse template [ d ] fine (base) template
Figure 1: Illustration of multiple-grid concepts for ng = 2.
The g-th (0 ≤ g ≤ ng − 1) coarse grid is constituted by each 2g-th node of the final
grid (g = 0; i.e. G0 = G). If T is a template defined by vectors hα, α = 0, . . . , nT − 1
where nT is the number of nodes in the template, then the template used for the grid
Gg, Tg is defined by hgα = 2g.hα and has the same configuration of nT nodes as T but
with spacing 2g times larger.
2.6 Dual Templates
For a given coarse template Tg, one can define a 3D bounding box around the nodes of
Tg such that this imaginary box is expanded to contain all the nodes of the template Tg
but not larger (Fig. 2). Then, the dual template of Tg, T̃g is defined as the template
6

that contains all the nodes within this bounding box. In other words, the dual template
T̃g contains the coarse nodes of the current coarse grid Gg as well as all the finest
nodes from the finest grid G0 which fall inside the bounding box. The total number of
nodes within the dual template T̃g is denoted by nT̃
and typically nT << nT̃. Fig. 2
illustrates a coarse grid template (also called a “primal template”) and its corresponding
dual template for g = 1 for a base template of size 3 × 3.
[ a ] primal template [ b ] dual template
[ c ] base template
full node
empty node
bounding box
Figure 2: Illustration of a primal template and its corresponding dual template for g = 1.
By definition, a dual template T̃g always shares the center node hg0 with its corre-
sponding primal template Tg. Using this property, the dual of a pattern patkT, patk
T̃is
defined as the pattern extracted at the same location u in the ti as patkT but using the
template T̃g instead of Tg. A dual data event devT̃(u) can be defined similarly.
7

3 The SIMPAT Algorithm
In this section, the details of the SIMPAT algorithm are presented using the above nota-
tion. For clarity, the algorithm is first presented without considering the details of the
application of the multiple-grid approach (such as the use of dual templates) and data
conditioning. These topics are elaborated in the subsequent subsections.
3.1 Single-grid, Unconditional SIMPAT
The basic algorithm can be divided into two modules: Preprocessing and simulation.
Preprocessing of the training image ti:
P-1. Scan the training image ti using the template T for the grid G to obtain all existing
patterns patkT, k = 0, . . . , nti
patT− 1 that occur over the training image.
P-2. Reduce the number of patterns to npatT
by applying filters to construct the pattern
database. Typically, only unique patterns are taken.
Simulation on the realization re:
S-1. Define a random path on the grid G of re to visit each node only once. Note that,
there is a variation to this step as explained in Section 3.1.3.
S-2. At each node u, retain the data event devT(u) and find the pat∗T that minimizes
d⟨devT(u),patk
T
⟩for k = 0, . . . , npat
T− 1, i.e. pat∗T is the ‘most similar’ pattern
to devT(u). See Section 3.1.4 for details of how the most similar pattern is searched
within the pattern database.
S-3. Once the most similar pattern pat∗T is found, assign pat∗T to devT(u), i.e. for all
the nT nodes u +hα within the template T, devT(u +hα) = pat∗T(hα). See Section
3.1.2 for details of why the entire pattern pat∗T is ‘pasted’ on to the realization re.
S-4. Move to the next node of the random path and repeat the above steps until all the
grid nodes along the random path are exhausted.
8

3.1.1 Multiple-categories and Continuous Variables
Section 2 explains the concepts used in the SIMPAT algorithm applied to a binary case.
Yet, one may notice that the only time the actual values of the training image ti or the
realization re are used is when calculating the distance between a pattern and a data
event. Within this context, extension to multiple-categories and continuous variables
can be implemented in a trivial manner. As long as the distance function chosen is
capable of handling the nature of the simulation variable (i.e. categorical or continuous),
all the concepts explained in Section 2 as well as the above basic version of the SIMPAT
algorithm remain intact, i.e. one does not need to modify the algorithm to accommodate
multiple-category or continuous variables.
The Minkowski metric explained in Section 2.4 is indifferent to the nature of the
simulation variable and thus can be used both with multiple-category or continuous
variables. There exists other distance functions that can only operate on a certain type
of variable. Examples of such distance functions are discussed in Section 5.
3.1.2 Enhancing Pattern Reproduction
Step S-3 of the above algorithm dictates that, at node u, the entire content of the most
similar pattern pat∗T is assigned to the current data event devT(u). The rationale behind
this pasting of the entire pattern pat∗T on to the data event devT(u) is to improve the
overall pattern reproduction within the realization re.
The above aim is achieved through two mechanisms: First, assigning values to mul-
tiple nodes of re at every step of the random path results in a rapid reduction of the
unknown nodes within re. Second, assigning the entire pat∗T to devT(u) communicates
the shape of the pattern existing at node u ‘better’: When another node u′ is visited
along the random path that happens to fall in the neighborhood of u, the distance calcu-
lations include not only the value of u but many of the nT nodes previously determined
at u. Thus, the ‘shape information’ provided by pat∗T is retained in a stronger manner
by encouraging a greater interaction between the patterns selected at neighboring nodes.
9

It is important to understand that, nodes assigned by pasting of pat∗T to devT(u) are
not marked ‘visited’, i.e. they will be visited again during the traversal of the random
path. Furthermore, although the current node u is marked visited after Step S-3, its
value is not fixed. When visiting another node u′ that falls in the neighborhood of u,
the previously determined value of u might be updated depending on the selected pat∗T
for node u′. In other words, the algorithm is allowed to revise its previous decisions
regarding the most similar pattern selection, i.e. any node value is temporary and may
change until the simulation completes. Due to this property, any node u of re is updated
approximately nT times during a simulation.
3.1.3 Skipping Grid Nodes
Whenever a pat∗T defined over a template T is pasted on to the realization, the algorithm
actually decides on the values of several nodes of re, not only the visited central value.
One might consider not visiting all or some of these nodes later during the simulation,
i.e. they might be skipped while visiting the remaining nodes of the random path. This
results in visiting less number of nodes within re and thus improves the CPU efficiency
of the algorithm. In SIMPAT, skipping of already calculated nodes is achieved by visiting
all grid nodes separated by a distance (called the “skip size”). In essence, this is a
modification of the Step S-1.
Consider the 2D 9 × 9 Cartesian grid given in Fig. 3. Assume a 5 × 5 template is
used and is currently located on u = u20. If the template T is defined by hα vectors
with α = 0, . . . , nT − 1 and nT = 25, then, the data event devT(u) is defined by vectors
u+hα such that u+hα = {u0, . . . ,u4,u9, . . . ,u13,u18, . . . ,u22,u27, . . . ,u31,u36, . . . ,u40}.
Assume the skip size is set to 3. During the simulation, when node u = u20 is visited,
the values of the most similar pattern pat∗T are used to populate all the values of the
data event devT(u). As the skip size is decided to be 3, all the nodes within the 3 × 3
neighborhood of the node u defined by the hβ vectors, β = 0, . . . , 8 such that u +
hβ = {u10,u11,u12,u19,u20,u21,u28,u29,u30} are marked ‘visited’ and removed from the
random path. This removal from the random path does not mean the values of these
10

nodes are fixed as explained in Section 3.1.2. It simply means the algorithm will not
perform an explicit most similar pattern search for these nodes.
10 2 3 4 5 6 7 8
9 13 14 15 16 17
18 22 23 24 25 26
27
10 11 12
19 20 21
28 29 30 31 32 33 34 35
36 37 38 39 40 41 42 43 44
45 46 47 48 49 50 51 52 53
54 55 56 57 58 59 60 61 62
63 64 65 66 67 68 69 70 71
72 73 74 75 76 77 78 79 801
2
3
4
5
6
7
8
9
1 2 3 4 5 6 7 8 9
1 2 3 4 5 6 7 8 9
1
2
3
4
5
6
7
8
9 10 2 3 4 5 6 7 8
9 16 17
18 25 26
27
10 11 12
19 20 21
28 29 30
13 14 15
22 23 24
31 32 33 34 35
36 37 38 39 40 41 42 43 44
45 46 47 48 49 50 51 52 53
54 55 56 57 58 59 60 61 62
63 64 65 66 67 68 69 70 71
72 73 74 75 76 77 78 79 801
2
3
4
5
6
7
8
9
1 2 3 4 5 6 7 8 9
1 2 3 4 5 6 7 8 9
1
2
3
4
5
6
7
8
9
( a ) visiting node u = 20 ( b ) visiting node u = 23
Figure 3: (a) Visiting node u = u20. The 5 × 5 template is placed on the node. Due to
the skip size of 3, the nodes within the 3 × 3 shaded area marked visited and removed
from the random path. (b) Visiting node u = u23 later during the simulation.
In the above example, a single most similar pattern search is performed but a total of
9 values are calculated. Hence, the number of nodes that needs to be visited is decreased
by a factor of 9, which results in 9 times less number of the most similar pattern search.
Thus, depending on the skip size, considerable speed gains might be achieved.
In general, only skip sizes much smaller than the template size should be considered.
The sensitivity of the skip size to the overall pattern reproduction quality of a realization
is discussed further in Section 4.2.
3.1.4 Searching for the Most Similar Pattern
In Step S-2, the algorithm requires finding the most similar pattern pat∗T given a data
event devT(u) minimizing d⟨devT(u),patk
T
⟩for k = 0, . . . , npat
T−1. This is a well un-
derstood problem in computational geometry known as the “nearest-neighbor problem”
or sometimes the “post office problem” due to Knuth (1997).
This problem can be trivially solved in O(npatT) time by calculating all possible
d⟨devT(u),patk
T
⟩and taking the minimum distance patk
T as pat∗T. Yet, this trivial
11

solution (also known as “linear search”) can be highly CPU demanding, especially when
both npatT
and nT are large; typically due to a large and complex 3D training image
calling for the use of a large template.
The computational geometry literature has many known algorithms that solve the
exact nearest-neighbor problem in at least O(log npatT) time. Approximate solutions
that perform better than this logarithmic time are also known. For a comprehensive
review of exact and approximate solutions, the reader is referred to Smid (1997).
Typically, it is not possible to take a computational geometry algorithm and imme-
diately apply it to SIMPAT as SIMPAT operates on data events with missing (unknown)
nodes, which is uncommon in computer sciences and thus generally not addressed by
the above cited solutions. Furthermore, the proposed solutions generally apply to cases
where nT < 100, whereas nT > 250 is typical in SIMPAT. Due to these issues, currently,
SIMPAT employs a slightly improved variation of the linear search for finding the most
similar pattern (See Section 4.5 of Duda et al. (2001) for the details of this improved
search). Further possible improvements of this scheme are discussed in Section 5.
3.2 Multiple-grid, Unconditional SIMPAT
In SIMPAT, the multiple-grid simulation of a realization is achieved by successively apply-
ing the single-grid algorithm to the multiple-grids starting from the coarsest grid Gng−1.
After each multiple-grid simulation, g is set to g− 1 and this succession of multiple-grids
continues until g = 0. The application of the multiple-grid approach can further be
discussed in two parts: Interaction between grids and use of dual templates.
3.2.1 Interaction Between Coarse and Fine Grids
At the beginning of the multiple-grid simulation, g is set to ng − 1, i.e. first the coarsest
grid Gng−1 is to be simulated. Then, the single-grid SIMPAT algorithm is applied to this
grid Gg using template Tg. When the current multiple-grid simulation is completed, the
values calculated on the current grid are transferred to Gg−1 and g is set to g − 1. It
12

should be noted that, different from the classical multiple-grid approach (Strebelle, 2002;
Tran, 1994), SIMPAT does not ‘freeze’ the coarse grid values when they are transferred to
a finer grid, i.e. such values are still allowed to be updated and visited by the algorithm
in the subsequent multiple-grid simulations.
On a grid Gg, the previously calculated coarse grid values contribute to the distance
calculation of Step S-2, i.e. if on node u a previous coarse grid value exists, this value
is taken into account when minimizing d⟨devTg(u),patk
Tg
⟩. Thus, the new value of
node u is calculated conditioned to both the coarse grid value and the newly available
neighborhood information devTg(u).
3.2.2 Using Dual Templates
Dual templates allows the algorithm to populate the nodes of the finest grid along with
the nodes of the current coarse grid.
To use dual templates, Step S-3 of the algorithm is modified. On node u, first,
the most similar pattern pat∗Tg is found based on the minimization of the distance
d⟨devTg(u),patk
Tg
⟩. Then, the corresponding dual pattern pat∗
T̃gis retrieved from the
pattern database. Finally, instead of populating the nodes of devTg(u), the algorithm
populates all the nodes of the dual data event devT̃g
(u), i.e. not only the coarse nodes
but also the fine nodes of re are updated.
Dual templates are used only when populating the nodes of the dual data event and
not during the distance calculations. In other words, Step S-2 of the algorithm is not
modified: the distance calculations are still performed on the original grid template Tg
using the data event devTg(u). This property means use of dual templates has no effect
on the current multiple-grid simulation as the finer nodes calculated by the dual pattern
pat∗T̃g
are never taken into account during the distance calculations of the current grid.
The effects of using dual templates will only be seen when simulating the one finer grid.
Use of dual templates can be envisioned as a dimensionality reduction method. In-
stead of minimizing d⟨dev
T̃g(u),patk
T̃g
⟩, where each vector entry to the distance func-
13

tion has nT̃g
nodes such that nT̃g
>> nTg , the algorithm uses the minimization of
d⟨devTg(u),patk
Tg
⟩as an approximation to the more costly minimization between the
dual data event and the dual pattern.
3.3 Data Conditioning
This section explains the details of how data conditioning to both primary and secondary
data is performed.
3.3.1 Conditioning to Primary Data
In SIMPAT, conditioning to primary data is performed in Step S-2 of the algorithm, during
the search for the pattern yielding the minimum d⟨devT(u),patk
T
⟩, k = 1, . . . , npat
T. If
a conditioning data exists on devT(u+hα), the algorithm first checks if patkT(hα) is within
a threshold ǫd of this data, i.e.∣∣∣devT(u + hα) − patkT(hα)
∣∣∣ ≤ ǫd. Typically, this threshold
ǫd is taken zero for hard conditioning information such as well data (ǫd = 0). If the pattern
patkT does not fulfill this condition, it is skipped and the algorithm searches for the next
most similar pattern until a match is found. If none of the available patterns fulfill the
condition, the algorithm selects the pattern that minimizes d⟨devT(u + hα), patkT(hα)
⟩,
i.e. only the nodes of devT(u) that has conditioning information are considered during
the distance calculations. If several patkT fulfills this condition, then a second minimiza-
tion is performed on the non-conditioning nodes of devT(u) using only the these patterns.
Note that, such a case generally occurs when the training image is not representative of
the conditioning data.
The above conditioning methodology used in SIMPAT can be summarized as follows:
1. At node u, retrieve the data event devT(u).
2. Divide the data event into two parts: devT,1 and devT,2 such that devT,1 con-
tains only the conditioning nodes of devT(u) and devT,2 contains only the non-
conditioning and uninformed nodes of devT(u).
14

3. Minimize the distance d⟨devT,1,patk
T
⟩to find the most similar pattern pat∗T to
the conditioning data event. If only one such pattern exists, take pat∗T as the final
most similar pattern and proceed with Step S-3 of the SIMPAT algorithm.
4. If several patterns minimize the distance d⟨devT,1,patk
T
⟩, perform another mini-
mization, namely d⟨devT,2,patk
T
⟩, only within these conditioned patterns to find
the final most similar pat∗T.
Conditioning data might impose certain problems when used in a multiple-grid set-
ting. A particular multiple-grid Gg might not include the location containing the condi-
tioning data. In such a case, as conditioning is performed during the distance calculations
using the coarse template Tg, the conditioning data will not be included within the cal-
culation, resulting in poorly-conditioned results.
SIMPAT avoids the above situation by making use of dual templates when condi-
tioning to primary data. While minimizing d⟨devT,1,patk
T
⟩, each corresponding dual
pattern patk
T̃is checked against the dual data event dev
T̃(u) to discover whether the
patkT̃
conflicts with the primary data. Such conflicting patterns are ignored during the
minimization. Recall that, by definition, a dual template contains extra fine grid nodes
in addition to the coarse grid nodes of the primal template. Thus, checking devT̃(u)
against patkT̃
guarantees that the final most similar pattern pat∗T selected is conditioned
to the primary data at the finest grid and not only at the current coarse grid.
3.3.2 Conditioning to Secondary Data
In Earth Sciences, secondary data typically refers to data obtained from an indirect
measurement such as seismic surveys. Thus, secondary data is nothing but a ‘filtered’
view of the original field of study (reservoir), where the filtering is performed by some
forward model F. Generally, the forward model F is not fully known and is approximated
by a known model F∗. Furthermore, secondary data typically exists in exhaustive form,
i.e. for every node u of the field of study, dt2(u) is known where dt2 is the vector of all
secondary data values.
15

Within this context, in SIMPAT, conditioning to secondary data calls for additional
steps to the basic algorithm. First, a secondary training image ti2 is required. This
training image can be obtained by applying the approximate forward model F∗ to ti.
Once the secondary training image is obtained, Step P-1 of the algorithm is modified
such that, for every patkT of the primary training image, a corresponding secondary
pattern pat2kT is extracted from the secondary training image from the same location.
In essence, patterns now exist in pairs in the pattern database.
Once the preprocessing module of the algorithm is modified this way, another mod-
ification is done to the Step S-2, i.e. the search for the most similar pattern. In-
stead of minimizing d⟨devT(u),patk
T
⟩, the algorithm now minimizes the summation
of d⟨devT(u),patk
T
⟩and d
⟨dev2
T(u),pat2kT
⟩where dev2
T(u) denotes the secondary
data event obtained from dt2, i.e. dev2T(u) = dt2T (u).
The net result of the above modifications is that, for every node u, the algorithm
now finds the most similar pattern not only based on the previously calculated nodes
but also based on the secondary data. When there is also primary data available, this
minimization is performed only after the patterns that condition to the primary data are
found as explained in Section 3.3.1, i.e. primary data has priority over secondary data.
The values of the secondary data events and the secondary patterns need not be
in the same range as the values of the primary data event and the primary patterns.
This is typically the case when seismic information is used as secondary data. In
such cases, the combined distance minimization might result in biased distances as
for a node u, d⟨dev2
T(u),pat2kT
⟩might be several orders of magnitude greater than
d⟨devT(u),patk
T
⟩, effectively dominating the distance calculation and shadowing the
contribution of the previously calculated re nodes to the combined distance.
To prevent the above problem, the individual distances are normalized such that both
d⟨devT(u),patk
T
⟩and d
⟨dev2
T(u),pat2kT
⟩range between the same values; typically,
[0,1]. Furthermore, a weight is attached to the combined summation to let the user of
the algorithm give more weight to either the primary or the secondary values, reflecting
the ‘trust’ of the user to the secondary data. Thus, for the pairs devT(u), patkT and
16

dev2T(u), pat2k
T, the final form of the distance function becomes:
d1,2 〈·, ·〉 = ω × d1⟨devT(u),patk
T
⟩+ (1 − ω) × d2
⟨dev2
T(u),pat2kT
⟩(10)
where d1,2 〈·, ·〉 is the final combined distance that will be minimized to find the most
similar pattern pat∗T, d1 〈·, ·〉 and d2 〈·, ·〉 are the normalized distances, ω is the weight
factor and typically ω ∈ [0, 1]. If desired a local ω(u) can be used instead of a global ω.
This reflects the fact that one has varying degrees of ’trust’ to secondary data in different
regions of the reservoir.
17

4 Examples
In this section, the results of several runs performed using the SIMPAT algorithm are dis-
cussed. The results are presented under three subsections: (1) Simple 2D, unconditional
examples; (2) complex 3D, multiple-category and continuous, unconditional examples
and (3) complex 3D, multiple-category, conditional examples. All results discussed in
this section are presented at the end of the section. Reported CPU times are obtained
using an Intel Pentium IV 2.4 GHz.
4.1 2D Simple Examples
Fig. 5 illustrates the intermediate steps of an application of the multiple-grid, uncon-
ditional SIMPAT to a binary (sand/non-sand) case. Using the 250 × 250 training image
given in Fig. 5a, the final realization (Fig. 5d) is obtained using a 11×11 base template,
3 multiple-grids and a skip size of 2. Fig. 5b and Fig. 5c are the intermediate multiple-
grid results for the coarsest and one finer grids, g = 2 and g = 1. Despite the fact
that these results are taken from intermediate steps of SIMPAT, they are still completely
informed due to the use of dual templates as explained in Section 3.3. In the figure,
the algorithm starts by ‘roughly’ placing the channel patterns on to the realization re
during the coarsest grid simulation. In essence, the multiple-grid approach ignores the
finer-scale details on the coarser grids. Later, the algorithm ‘corrects’ the details of the
realization as subsequent multiple-grid simulations are performed. Fig. 5e and Fig. 5f
shows closeups of the same region on the second coarsest grid and on the finest grid.
Here, the distance calculations detect the broken channels that does not exist in the
training image and replace them with connected channel patterns.
Fig. 6 provides some insights into the sensitivity to template size when a fixed skip
size of 2 is used. As expected using a small template (3 × 3) results in poor pattern
reproduction (Fig. 6b). Increasing the template size to 5 × 5 (which effectively triples
the number of template nodes nT) improves the pattern reproduction (Fig. 6c). Succes-
sive increases in the template size continue to improve the final results; yet, it appears
18

that after a certain threshold, increasing the template size does not provide any further
improvements. This threshold (sometimes called “the optimum template size”) is related
to the complexity of the patterns found in a training image. Given a training image,
automatic discovery of the optimum template size is one of the active research topics of
pattern-based geostatistics.
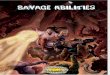
Fig. 7 shows application of SIMPAT to different types of 2D training images. Of these,
Fig. 7e and 7f demonstrate the capability of pattern-based geostatistics to inherently
reproduce the lower-order statistics that exist in the training image. A visual check of
the SIMPAT realization in Fig. 7f shows that the algorithm successfully reproduces the
Gaussian patterns found in the training image. Variogram comparisons between the two
figures further confirms this check (Fig. 4).
Figure 4: Comparison of 0◦, 45◦ and 90◦ variograms of Fig. 7e and 7f. The color red
denotes the calculated variograms of the SIMPAT realization.
4.2 3D Complex Examples
Fig. 8a is an example of wavy bed lamination. This continuous training image of size
90×90×80 is generated using the SBED software (Wen et al., 1998). In this example, the
training image contains complex patterns in the finest scale. Yet, higher scale patterns
are fairly repetitive and thus can be considered ‘simple’. A template size of 11 × 11 × 7
19

is chosen to reflect the complexity of fine scale patterns. Due to the apparent repetitive
and simple nature of the higher scale patterns, a skip size of 6 is used on all grids, which
significantly improved the CPU time of the run (35 minutes). The SIMPAT unconditional
realization for this case is shown in Fig. 8b.
Fig. 9a is a 7 facies, complex training image of size 100 × 75 × 25, depicting a tidal
channel system. Another notable property of Fig. 9a is that, the image is highly non-
stationary, especially in the higher scales, where one facies appears only locally (The
facies represented by the yellow color which runs through the x-axis). Fig. 9b shows
the unconditional SIMPAT realization obtained using a 15 × 15 × 5 template and a skip
size of 4 on all grids. As the figure illustrates, the algorithm successfully captures the
non-stationary, local behavior of the training image, while also retaining the other more
stationary facies relations. The CPU time for this run was approximately 120 minutes.
Fig. 10 studies the sensitivity to the skip size. The figure demonstrates that the
pattern reproduction quality of realizations might be sensitive to the skip size setting,
especially in complex 3D training images where one facies dominates the others (such as
the non-channel, background facies of Fig. 10a). In such cases, one might observe propor-
tion reproduction problems, which in turn, might cause pattern reproduction problems.
Fig. 10b and Fig. 10c reveal this issue: When a higher skip size setting is used, the
realization honors the patterns in the training image better. Removing this sensitivity to
skip size is an active area of research and is further discussed in Section 5. In this case,
the better realization of Fig. 10b required approximately 100 minutes of CPU time; Fig.
10c, albeit produced worse results, took approximately 400 minutes.
4.3 3D Conditional Examples
Fig. 11 shows a 100× 100× 50 synthetic reference case with 6 facies generated using the
SBED software. Two different data sets are sampled from this reference case to test the
primary conditioning capabilities of SIMPAT (Fig. 11b and 11c).
The first, dense data set is used with a train imagine that is highly representative
20

of the reference (Fig. 12a). Using such a training image guarantees that, during the
simulation, the number of conflicting patterns are kept to a minimum. Yet, in a real
reservoir, one would expect a reasonable amount of conflict between the available data
and the selected training image. Thus, the final SIMPAT realization (Fig. 12c) obtained
for this case should be viewed as a check of the conditioning capabilities of SIMPAT rather
than a representative example of primary data conditioning in a real reservoir.
The second, sparse data set is used with a training image that contains patterns
which are more likely to conflict with the available data (Fig. 13a). In this case, the
data dictates stacked channels whereas the training image only has isolated channels.
Combined with the sparse data set, use of this training image can be considered as a
representative conditioning example in a real reservoir. Fig. 13c is the final conditional
SIMPAT realization obtained.
Fig. 14, 15 and 16 demonstrate the application of secondary data conditioning using
SIMPAT. In this case, secondary data is obtained by applying a seismic forward model F∗
to the binary reference case (See Wu and Journel (2004) for details of the forward model
used). The same model is applied to the training image to obtain the secondary training
image. The final SIMPAT realization generated (Fig. 16b) has the settings 11 × 11 × 3
template size and a skip size of 2. The realization conditions to secondary data relatively
well but pattern reproduction is somewhat degraded as made evident by the disconnected
channel pieces in Fig. 16b. It is believed that this problem occurs because the template T
used for the secondary data events dev2T(u) might not be representative of the volume
support of the secondary data. This issue is furthered discussed in Section 5.
21

[ a ] training image [ b ] multiple-grid ( g = 2 )
[ c ] multiple-grid ( g = 1 ) [ d ] realization ( g = 0 )SIMPAT
250
250
sand
non-sand
[ e ] closeup area of ( c ) [ f ] closeup area of ( d )
Figure 5: Intermediate steps of the multiple-grid, unconditional SIMPAT. (e) and (f) are
the closeups of the marked regions on (c) and (d).
22

[ a ] training image [ b ] template size = 3x3
[ c ] template size = 5x5 [ d ] template size = 7x7
250
250
sand
non-sand
[ e ] template size = 11x11 [ f ] template size = 21x21
Figure 6: SIMPAT realizations obtained using different template sizes with a fixed skip
size of 2 for all grids.
23

[ a ] training image [ b ] realizationSIMPAT
[ c ] training image [ d ] realizationSIMPAT
100
100
levee
non-sand
[ e ] training image [ f ] realizationSIMPAT
1.0
0.0
250
250
300
300
sand
non-sand
channel
Figure 7: SIMPAT realizations obtained from different training images: (a) is a binary
training image generated using the SBED software; (b) is a 3 facies training image gener-
ated using an object-based model and (c) is a continuous training image generated from
an unconditional SGSIM run.
24

[ a ] training image
[ b ] SIMPAT realization
0.5
0.1
Figure 8: A wavy bed lamination training image (continuous) and its SIMPAT realization.
25

[ a ] training image
[ b ] SIMPAT realization
7
1
Figure 9: A tidal channel training image (7 facies) and its SIMPAT realization.
26

[ a ] training image
[ b ] SIMPAT realization w/ skip size 4, 4, 2
[ c ] SIMPAT realization w/ skip size 2, 2, 1
3
0
Figure 10: A channel training image (4 facies) and two SIMPAT realizations obtained
using different skip size settings. Each figure shows two z-slices.
27

[ a ] reference
[ b ] dense well data ( 150 wells )
[ c ] sparse well data ( 50 wells )
5
0
Figure 11: Reference for primary data conditioning and two data sets randomly sampled
from this reference.
28

[ a ] training image
[ b ] primary data ( 150 wells )
[ c ] realizationSIMPAT
5
0
Figure 12: Primary data conditioning result obtained using a training image that is
highly representative of the reference given in Fig. 11 and a dense data set.
29

[ a ] training image
[ b ] primary data ( 50 wells )
[ c ] realizationSIMPAT
5
0
Figure 13: Primary data conditioning result obtained using a training image that has
conflicting patterns with the given sparse data set.
30

[ a ] reference
[ b ] secondary data ( seismic )
11.0
3.0
sand
non-sand
Figure 14: Reference for secondary data conditioning and the corresponding synthetic
seismic obtained using an approximate forward model F∗.
31

[ a ] training image
[ b ] secondary training image
11.0
3.0
sand
non-sand
Figure 15: Training image for secondary data conditioning and the corresponding sec-
ondary training image obtained using the same F∗ as Fig. 14.
32

[ a ] reference
[ b ] conditional realizationSIMPAT
sand
non-sand
sand
non-sand
Figure 16: The conditional SIMPAT realization generated using the secondary data shown
in Fig. 14 and the training image in Fig. 15.
33

5 Future Work
In this section, several ongoing additions to the current SIMPAT implementation in various
stages of development and testing are discussed.
5.1 Conditional SIMPAT
As discussed in Section 4.3, there are two main issues related to the conditioning capa-
bilities of SIMPAT that require further studying:
1. Conflicting training image patterns and primary data: As discussed in conjunction
with Fig. 13, a conflict between the patterns and the primary data might result
in poor pattern reproduction. One possible solution to the problem is to mod-
ify the primary conditioning scheme such that, when comparing the conditioning
data event devT,1 to patkT, data closer to the center node u of the template T
are given more weight in the distance calculation. This modification is expected
to improve pattern reproduction without sacrificing too much data conditioning
when the training image patterns and the primary data are at most moderately
conflicting. If there is a strong disagreement between the training image and the
primary data, the user is advised to revise the training image selection instead.
2. The issue of volume support when conditioning to secondary data: The secondary
data conditioning methodology explained in Section 3.3.2 dictates that the same
template T be used both for the primary data event devT(u) and the secondary
data event dev2T(u). Yet, in Earth Sciences, secondary data (such as seismic)
typically has a different volume support than the volume support of the primary
variable. Thus, for secondary data events and patterns, using a different template
T2 to reflect this difference might improve the pattern reproduction quality of the
realizations. Fig. 17 – 19 illustrate the case where a different template T2 is used
for the secondary data events and patterns. In the figure, the primary template T
has the size 11 × 11 × 3 and the secondary template T2 has the size 5 × 5 × 7.
34

[ a ] reference
[ b ] secondary data ( average )
1.0
0.0
sand
non-sand
Figure 17: Reference case for secondary data conditioning using a different T2. The
secondary data is obtained by applying a low-pass filter on the binary facies model.
35

[ a ] training image
[ b ] secondary training image
1.0
0.0
sand
non-sand
Figure 18: Training image for secondary data conditioning using a different T2.
36

[ a ] reference
[ b ] conditional realizationSIMPAT
sand
non-sand
sand
non-sand
Figure 19: The conditional SIMPAT realization generated using the secondary data shown
in Fig. 17 and the training image in Fig. 18.
37

5.2 Relational Distance
The Minkowski metric explained in Section 2.4 can be used both with multiple-category
and continuous variables. Yet, the generalized nature of this distance function might
not be desired in all cases; especially when used with multiple-categories: In Earth
sciences, multiple-categories are typically used to generate facies models of the field of
study (reservoir). It is well-understood that, in such models, certain facies exhibit tight
relations (For example, a channel facies and an attached levee facies) and such relations
should be honored in the generated realizations.
In SIMPAT, facies relations are described through the training image patterns. The
distance function used (Manhattan distance) is indifferent to these relations, i.e. it does
not differentiate between facies and treats them ‘equally’. For large templates, this
property of the Manhattan distance might be undesirable due to its possible effect on
the most similar pattern search (Duda et al., 2001). For example, the sensitivity to skip
size that is discussed in Section 4.2 is believed to be one of such undesirable effects.
To circumvent the problem, one might envision replacing the Manhattan distance such
that, in the new distance function, the facies relations are expressed by defining certain
categories to be ‘less distant’ to each other.
One possible implementation of the distance function described above can be achieved
thorough defining a matrix of category (facies) relations and using this matrix to calculate
the individual pixel distances within the summation over the template nodes hα. Consider
the below general distance function:
d⟨devT(u),patk
T
⟩=
nT∑
α=0
dα
⟨devT(u + hα), patkT(hα)
⟩(11)
where dα 〈xα, yα〉 is currently defined as |xα − yα|. Instead of this definition, one can
define dα 〈xα, yα〉 such that each xα, yα pair points to an entry in a matrix that defines
relative distances between categories. For categorical variables, xα and yα are indicator
values, i.e. = 0, 1, . . . , nf − 1 where nf is the number of categories. Thus, an xα, yα pair
can be taken as the column and row indices of the matrix and dα 〈xα, yα〉 as the cell value
of the matrix at this column and row. Unknown/missing values are trivially handled
38

by defining the unknown identifier χ as another unique category and setting the matrix
entry to zero for all xα, yα pairs such that either xα or yα equals to χ.
This above distance function is named “Relational Distance” and will be implemented
in a future version of SIMPAT. Two benefits are expected to be achieved through the use
of Relational Distance: (1) Better pattern reproduction due to explicit honoring of facies
relations within the distance function and (2) lower sensitivity to skip size.
5.3 Conditioning to Local Angles and Affinities
Constraining the realizations using available local angle and affinity information (typically
obtained from seismic or via expert input) can be achieved by using multiple training
images in a single simulation run.
The SNESIM algorithm imposes a similar approach (Zhang, 2002). Consider the case
of angle conditioning only. SNESIM first divides the angle data into classes. Say the
angles of the field in question range between [−90, 90] degrees and a total of 6 an-
gle classes are desired. SNESIM implicitly rotates the given training image to angles
−75o,−45o,−15o, 15o, 45o and 75o and uses these rotated training images for different
parts of the simulation grid dictated by the angle data. For example, if the angle at node
u falls between [0, 30] degrees (i.e. the first bin), the training image that is rotated 15o
is used to perform the data event lookup. A similar mechanism is utilized for affinities.
A slightly different approach will be used in future implementations of SIMPAT. Instead
of implicitly transforming the training images internally, SIMPAT will accept the use of
explicit training images for different parts of the simulation grid (called regions). A
separate software will be provided to the users of SIMPAT that performs angle and affinity
transformation on the training images for convenience.
To understand the approach better, consider the case of angle conditioning only.
Simply put, one can control the angle of individual patterns by using rotated training
images in different parts of the simulation grid while ensuring a smooth transition between
these different parts (regions). At a given node u, the most similar pattern search will be
39

performed using the particular rotated image; thus, resulting in a rotated pattern. The
same mechanism is also applicable to affinity conditioning. When both angle and affinity
information is desired to be retained for the same location, a training image that is both
rotated and scaled can be used.
5.4 Computational Issues
Step S-2 of the SIMPAT algorithm requires finding the most similar pattern pat∗T given
a data event devT(u) minimizing d⟨devT(u),patk
T
⟩for k = 0, . . . , npat
T− 1. As ex-
plained in Section 3.1.4, currently SIMPAT employs a modified linear search to perform
this minimization.
For complex training images and large simulation grids, the performance level of linear
search is undesirable; especially when a large template is used. One solution to address
this issue is to parallelize the algorithm and exploit multiple CPUs to improve the search
performance. From an algorithmic point of view, parallelization of SIMPAT is trivial:
One can divide the pattern database into ncpu parts where ncpu is the number of CPUs
available. Then, instead of minimizing d⟨devT(u),patk
T
⟩for k = 0, . . . , npat
T− 1, each
CPU minimizes d⟨devT(u),patk
T
⟩for k = α, . . . , β where α and β denote the beginning
and ending indices of ranges of size npatT/ncpu. In essence, each CPU searches for a
similar pattern pat∗,cT where c denotes the CPU index and c = 0, . . . , ncpu − 1. Once the
results for these minimizations are obtained, a final minimization of d 〈devT(u),pat∗,cT 〉
is performed to find the final most similar pattern pat∗T. This method of parallelization
is currently being tested and is expected to be included in the next version of SIMPAT.
Another possible solution to the CPU time problem can be achieved through the
use of dual templates. As explained in Section 2.6, once the multiple-grid simulation of
the coarsest grid Gng−1 is complete, the entire realization re is fully informed as dual
templates populate the finest grid nodes in addition to the coarse grid nodes. Thus,
the algorithm guarantees that for any grid Gg other than the coarsest grid Gng−1, the
data event devTg(u) is also fully informed and does not contain unknown/missing nodes.
40

Once can envision exploiting this property of dual templates by using a dimensionality
reduction method on devTg(u) and patterns patkTg and calculating the distance on these
reduced data events and patterns. A reduction in the dimensionality of the most similar
pattern search problem might provide significant performance gains. Furthermore, this
method can be used in conjunction with the above parallelization methodology. One
example of such a dimensionality reduction method is discussed in Zhang (2004).
41

6 Acknowledgments
I would like to thank to Prof. Dr. Jef Caers and Prof. Dr. Andre Journel from
Stanford University for their advices and continual support. Many parts of the algorithm
got refined and corrected thanks to Jef’s suggestions and his through testing of the
software implementation of SIMPAT. Dr. Sebastien Strebelle from ChevronTexaco set the
initial motivations for different parts of the study and endured long hours of discussions
about the methodology, sharing his experience on the subject matter. Tuanfeng Zhang
from Stanford University spent several days with me, explaining the implementation
details of SNESIM and shared his ideas about possible improvements. Jianbing Wu and
Jenya Polyakova (Stanford University) patiently helped with the testing of the software
implementation of SIMPAT. Jianbing also generated one of the data sets that we used as
a secondary data conditioning example. Dr. Renjun Wen from Geomodeling Technology
Corp. kindly provided us with the SBED software which we used to generate realistic and
highly complex training images. The wonderful GEMS software of Nicolas Remy (Stanford
University) was indispensable for visualizing the results. Finally, Anuar Bitanov (Agip)
and Sunderrajan Krishnan (Stanford University) also contributed to different parts of
the study by allowing me to see certain concepts in a more clear way.
References
J. Caers and G. B. Arpat. Multiple-point geostatistics: Choosing for stationarity or sim-
ilarity. SCRF Annual Meeting Report 17, Stanford Center for Reservoir Forecasting,
Stanford, CA 94305-2220, 2004.
J. Caers, S. Strebelle, and K. Payrazyan. Stochastic integration of seismic and geological
scenarios: A submarine channel saga. The Leading Edge, pages 192–196, March 2003.
C. Deutsch and A. Journel. GSLIB: Geostatistical Software Library. Oxford University
Press, Oxford, 2nd edition, 1998.
42

O. Duda, P. Hart, and D. Stork. Pattern Clasification. John Wiley & Sons, Inc., New
York, 2nd edition, 2001.
F. Guardiano and R. Srivastava. Multivariate geostatistics: Beyond bivariate moments.
In A. Soares, editor, Geostatistics-Troia, pages 133–144. Kluwer Academic Publica-
tions, Dordrecht, 1993.
D. E. Knuth. Art of Computer Programming. Addison-Wesley Pub. Co., 3rd edition,
1997.
M. Smid. Closes-point problems in computational geometry. In J. Sack and J. Urrutia,
editors, Handbook on Computational Geometry. Germany, 1997.
S. Strebelle. Sequential Simulation Drawing Structures from Training Images. PhD thesis,
Stanford University, 2000.
S. Strebelle. Conditional simulation of complex geological structures using multiple-point
statistics. Mathematical Geology, Jan. 2002.
S. Strebelle, K. Payrazyan, and J. Caers. Modeling of a deepwater turbidite reservoir con-
ditional to seismic data using multiple-point geostatistics. In SPE ATCE Proocedings,
number SPE 77425. Society of Petroleum Engineers, Oct. 2002.
T. Tran. Improving variogram reproduction on dense simulation grids. Computers and
Geosciences, 20(7):1161–1168, 1994.
R. Wen, A. Martinius, A. Nass, and P. Ringrose. Three-dimensional simulation of small-
scale heterogeneity in tidal deposits - a process-based stochastic simulation method. In
4th. Annual Conf. Proocedings. International Association for Mathematical Geology,
1998.
J. Wu and A. Journel. Water saturation prediction using 4D seismic data. SCRF Annual
Meeting Report 17, Stanford Center for Reservoir Forecasting, Stanford, CA 94305-
2220, May 2004.
43

T. Zhang. Rotation and affinity invariance in multiple-point geostatistics. SCRF Annual
Meeting Report 15, Stanford Center for Reservoir Forecasting, Stanford, CA 94305-
2220, May 2002.
T. Zhang. A filter approach to modeling patterns from training images. SCRF Annual
Meeting Report 17, Stanford Center for Reservoir Forecasting, Stanford, CA 94305-
2220, May 2004.
44