Embed Size (px)
Citation preview
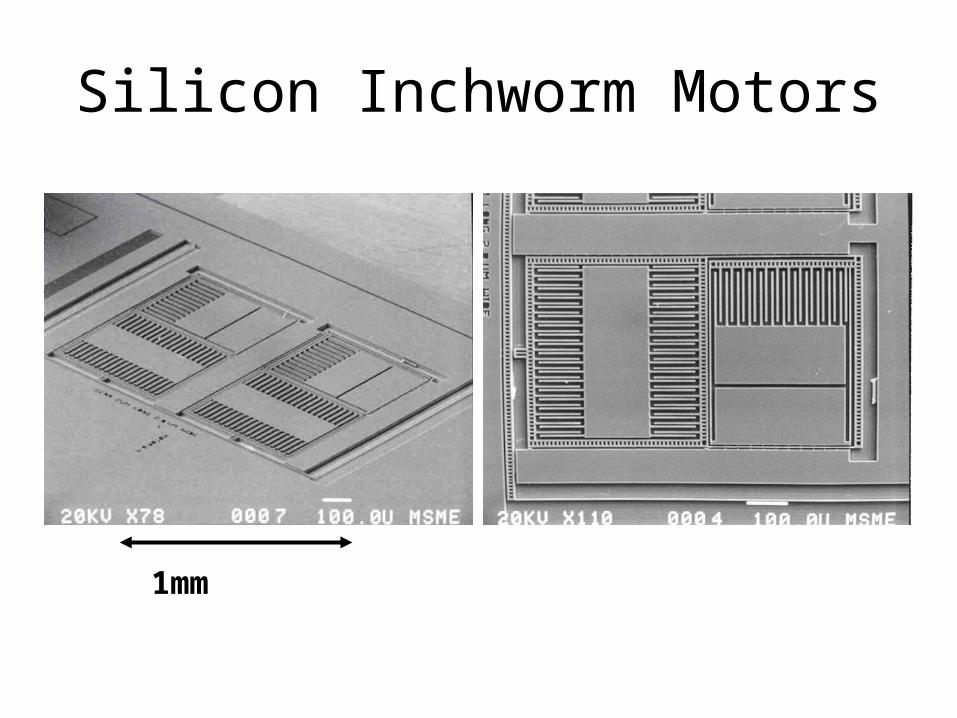
Silicon Inchworm Motors
1mm

Autonomous MicrorobotSeth Hollar, Sarah Bergreiter
Anita Flynn, Kris PisterSolar Cells
Motors
Legs
CMOSSequencer
8.6 mm

“The Actuation” – Hinges, Motors, Legs, Frame
“The Power” – Solar Cell Arrays and High Voltage Transistors
“The Brain” - CMOS Digital Circuits
Microrobot – Three Processes

Solar Cell/High Voltage ChipCMOS Chip
Robot Legs and Motors Chip
– Affix robot to wax for wirebonding
– 21 wirebonds
Assembly


Inchworm Motor
Preset Structure Leg and Linkage
Drive Actuator
Clutch
ActuatorsShuttle
Robot Leg Layout








Design of 2DOF Leg
ShuttlesKnee
Tendons
FootHip
Poly Crossover


Thrust and Power from Solid Propellant Microrockets
William Lindsay, Dana Teasdale, Veljko Milanovic, Kristofer Pister, and Carlos Fernandez-PelloBerkeley Sensor and Actuator Center
University of California Berkeley

Combustion – Teasdale, Lindsey• Solid rocket propellant
• 7 seconds thrust, Isp=15s
• ~1mJ out

Altitude vs. Average Thrust
050
100150200250300350
0.001 0.1 10 1000
Thrust Force (Newtons)
Alt
itu
de
(m
ete
rs)
Assuming pressure drag, constant total impulse

Next Generation Design
Increase the thrust and decrease the mass, while controlling thermal losses

Thrust Measurements vs. Theory
0
5
10
15
20
25
0 0.5 1 1.5 2 2.5
Time (sec)
Thru
st (m
illin
ewto
ns)
Predicted altitude: 50 m

Rocket in Action

ROCKETBOY THANKS
YOU!
(Bill Lindsay)





























