Embed Size (px)
Citation preview

Setting up a groundstation : automatic routines for web interface
and data dissemination
2nd EGO Workshop
Glider school
Mallorca, Oct 2007
Laurent Mortier

Cooperative steering of a fleet of gliders through a non centralized network
Iridium
GroundStation 2
Groundstation 1
Freewave antennas
Objectives : - automated generation of steering commands, - plotting data in NRT and- web publishing for a fleet of gliders - for the three types of gliders available today : slocum, spray and seaglider
Constraints to take into account :- Different manufacturer interfaces- Glider groundstation not always accessible- Asynchronicity, quality and low rate of comms- Iridium AND freewave (slocum only) + Argos- Distributed steering among partners- Heterogeneous networks of computers- Maintenance, failure and transit from the gliderports
Web server for steering

North Western Mediterranean Sea Observatiory in winter-spring 2007
Northern current
Winter mixing, subduction
7 gliders6 gliders simultaneously
From December 2006 to June 2007
~3200 profiles (200m and 1000m depth)
Large, meso, and small scale processes
Spray016
floats
XBTs, CTDs,
gliders
No deep convection this winter!!!

Present groundstation for a single glider
• Steering : partially automated (equivalent to what the WRC dockserver is doing)+alarms• Ploting NRT data : completely automated but fixed format for plots• Forecasting of the trajectories : completely automated with the daily updated waypoint• Saving to Coriolis DC : automated
Data Center(Coriolis, GTS, …)
Operational model (MERCATOR, MFS, …)
Groundstation (dockserver, Kermit,
mail, …)

labo/home/cybercafe/3G
observed SST(e.g. MEDSPIRATION)
Forecast of the trajectories of gliders 1,2,3...
(operational forecast MERCATOR, MFS, …)
• Storage of the NRT data from the gliders
• Data processing forecasts, geophysical data, engineering data, …
Coriolis
Slocum 1
dia01@locean
Server G1
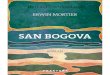
Present groundstation at LOCEAN for steering and data flow
Modem-modem - slocum : terminal using Kermit - spray : mail
/mnt, mail
ftp
http
Spray 1 Iridium server
ftp
wget
scp
2 internal disks RAID x.x
500 Go External disk
rsync
thot@locean or [email protected]

Requirements of the present system at LOCEAN
• Network and machine requirements
• Groundstation : PC with secured storage (redundancy) and/or access to archiving facilities
• SLOCUM : US Robotics modem provided by WRC
• Optional : a PC for modem connection to the modem (see below)
• Commands, daemons, software's on the groundstation machine
• LINUX distribution (bash)
• cron, ssh, ftp with associated deamons, rsync
• C-Kermit
• procmail (needs access to /var/spool/mail. if not ,fetchmail is needed)
• matlab (licenced and available !! Better to have a private licence). Useful for plotting put also for plenty of other tasks including scientific analysis… OR octave (http://octave.sourceforge.net/, not tested) or python (Lucas Merckelback)
• acces to mail and web (wget) facilities
• screen (http://www.gnu.org/software/screen) very useful terminal multiplexer
• optional : mail and web servers installed on the groundstation machine
• If modem reception on a separate machine (luxurious but secure solution)
• air-conditioning, UPS (uninterruptible power supply)
• LINUX distribution with almost nothing but absolute need to read mail, ssh and ftp !
• provide additional backup for the NRT data

Why Kermit and not WRC dockserver for the SLOCUM ?
• Kermit used to
• open a terminal on the glider (interactive or batch mode)
• send and receive files from the glider
• useful to install locks and send signals
• Interactive Kermit
• does what the GMC terminal is doing
• presently with less ergonomy : output / input are in the same terminal …
• Kerbang mode
• does what the GMC terminal is doing (script mode)
• sends signals to groundstation (plotting, …) and alarms to glidermen and women !
• Main interest of this solution
User fitted
Easy to customize
We developed it because WRC dockserver versions (~ 2 years ago) not stable at that time

Running a mission today
Send email to staff
Send alarm to shift people (sms)
Send signal to groundstation for plots, ftp
Start kerbang robot,Controls and alarms, open logs
Interactive (kermit or dockserver) :Run test missions, then main mission
kerbang loop
If ABORT callback in a moment
If *.ma available, fetch and reread mission
Receive 3 SBD files
Wait for RING (iridium)
Resume the mission
[email protected] [email protected]
Operators at sea
Shift people

Running missions for several gliders in a next future (this winter hopefully)
groundstation@somewhere: one part lab but remote access possible Operators at sea
Website :shift people steer
the gliders according to their access rights set by the glider's owners
from any places with internet access
(lab, home, cybercafe, …)
dia01@somewhere dia02@somewhere else dia03@somewhere else
Master control & archiving
mi/ma files
webserver@somewhere with mirroring sites
Mysql EGO database
NO direct connection to the groundstation machines

The web interface for steering a fleet of glider
Why email between the web server and the glider groundstation ?• the only simple way to go through firewalls easily (but beware of anti spammer!!)• secure enough (control using keys or any kind of password)• problem : how to get an acknowledgment of receipt from the groundstation ?
http://www.locean-ipsl.upmc.fr/gliders

Man pages, manuals, installation package, …
• Available today
• "gliderman" kermit short manual
• man pages for "ker" scripts
• general description (in french) of
the installation on the PCs
• Tomorrow
• « installation package » for the groundstation machines (LINUX)
• Web steering interface available (included in the EGO website or independent)
• Simple User guides or README files
• Very similar to the GLMPC terminal from WRC but suitable for Spray and Seaglider too. No direct connection required to the groundstation
• Future plans
• Integration of other EGO tools : igloo (NOCS), automatic generation of waypoints (IMEDEA), …
• Interaction with the dockserver ??
• More general interface for an heterogeneous fleet of AUVs (IFREMER)
kerstart(1) USER COMMANDS
kstart(1)
NAME
ksertart - start or restart the glider robot
SYNOPSIS
ksertart [-cfFh] [-D dir] [-S nom] [-I nom] [-T sec]
DESCRIPTION
kerstart search ...
OPTIONS
-c check for children of the script to start or restart. If any,
kstart will wait for KERALIVE seconds (see the -T option) before
proceeding. The default is to consider all processes with no
check of their dependance
-f force killing only the kerbang processes (see the -S option)
. . .