Embed Size (px)
Citation preview

Servodrives
TGN servomotorsAKD digital servoamplifiers

The Czech company TG Drives offers servodrives since 1995 for machines and equipments in industrial automation. The range of service of our technicians and programmers includes design, optimization including custom solutions, programming, configuring and start up. Servodrives and control systems from TG Drives are used in the cutting tables, CNC machines and machining centers, automotive, rubber, food, glass and construction industries.
Easy solution of every motion
TG Drives, s. r. o.Jeneweinova 37CZ 617 00 Brno
www.tgdrives.czTel.: +420 545 234 935Fax: +420 545 234 735E-mail: [email protected]
Production and delivery of servodrives and control systems.
1. Servomotors�TGN,�TGH�and�TGT�synchronous�servomotors��with�permanent�magnets
2. Digital servoamplifiersAKD�digital�servoamplifiersTGA300�digital�servoamplifiersS700�digital�servoamplifiersTGP�three-axis�digital�servoamplifiersTGA-24�and�TGA-48�digital�servoamplifiers
3. Precision mechanical systemsEXLAR�linear�actuatorsDRIVESPIN�precision�rotary�actuatorsTWINSPIN�cycloidal�reducershigh�precision�planetary�reducers
4. TG Motion control system
5. Industrial PCs and operator terminalsASEM�panel�and�standard�industrial�PCsESA�operator�terminals
Our servicesDesign�and�optimization�of�servodrives.Design�of�control�system.Programming.Start�up.Customer�service.

Holding BrakeAll�servomotors�can�be�delivered�with�or�without�a�built-in�electromagnetic�holding�brake.�The�brake�is�not�intended�for�the�positioning.�The�purpose�of�the�brake�is�to�lock�the�motor�in�zero�speed.
Supply voltage:�24�VDC�−0��%�+10��%�Location:�Back�side�of�servomotor.
FeedbackThe�flexible�design�of�servomotors�allows�different�feedback�sensor�mounting.�The�most�frequent�types�are:
Resolver�is�a�brushless�electric�appliance,�used�for�rotor�position�measuring�and�for�commutation�angle�derivation.�Resolver�is�commonly�used�as�a�position�and�angle�speed�sensor�in�regulation�circuits�of�servoamplifiers.
EnDat is�high�resolution�encoder�with�a�data�channel.�The�absolute�position�is�sent�through�a�fast�serial�interface.�The�sine�–�cosine�shape�of�the�incremental�signals�(1Vpp)�provides�highly�accurate�positioning.�(100.000�incre-ments�per�revolution).�The�EnDat�sensor�could�be�single-turn�or�multi-turn�(4096�turns).
Hiperface is�–�like�EnDat�–�a�high�resolution�encoder�with�a�data�channel.�The�absolute�position�is�sent�through�a�fast�serial�interface.�The�sine�–�cosine�shape�of�the�incremental�signals�(1Vpp)�provides�highly�accurate�positioning.�(100.000�increments�per�revolution).�The�sensor�could�be�single-turn�or�multi-turn�(4096�turns).
Comcoder�is�a�combined�incremental�encoder.�An�absolute�position�is�given�through�the�commutation�signalsof�three�Halls.�The�incremental�signals(5V�TTL)�provides�accurate�positioning.
Temperature protectionThe�temperature�of�the�winding�is�monitored�by�sensors�in�the�stator�windings.�The�temperature�is�then�signaled�via�an�electrically�isolated�contact�(thermo�contact�or�posistor).�The�sensors�are�set�so�that�the�winding�temperature�does�not�exceed�150°C.�The�type�of�temperature�protection�should�be�specified.
Technical dataDesign:�flange,�B5Colour: matt�black Bearings: closed�ball-bearings�with�grease�Protection:�IP64�(IP54�as�shaft�motor�part),�as�an�option�IP67�including�shaft�protection�Insulation class:�FCooling:�convection�(type�A)�Temperature: according�to�the�ČSN�EN�60034,�rise�of�temperature�T�=�110°C,�ambient�temperature�T�=�40°CLoad cycle:�continual�(S1)�Electrical connection:�connectors,�connectors�counterparts�or�cable�bushings�
TGN�servomotors�are�produced�for�different�DC-bus�voltages�(36V,�320V,�560V)�and�for�different�nominal�speed�(500,�1000,�1500,�2000,�3000,�4500�rpm).�The�catalogue�includes�motors�with�nominal�speed�3000�rpm�(except�some�types�of�TGN2�and�TGN3)�and�DC-bus�voltage�36V,�320V�and�560V.�We�can�send�you�technical�parameters�of�motors�designed�for�other�DC-bus�or�speed�on�demand.
TGN synchronous servomotorsAC synchronous servomotors have a three-phase distributed stator windings and permanent magnets on the rotor. The winding is designed for sinusoidal current and voltage. A thin layer of magnets (neodymium / iron / boron) is located on the surface of the rotor shaft, which causes a small inertia torque of motor.
Higher torque, then higher power of the TGN motor range is achieved by improving escape of heat from the stator to the front flange and by optimized magnetic circuit. Shortening of stator plates and segmented stator windings with higher density of magentic field allows shortening of the motor length. These advantages increase the ratio of torque to the dimensions of motor and expand usage of the motors to other applications.
1
Servomotors
1

Coding example
T G N 3 - 0 2 0 5 - 4 5 - 5 6 0 / T 1 P B S 4 W K X
Nominal speed (30 = 3000 rpm)
Temperature protection (T0 – termocontact, T1 – PTC111-K13, T3 – KTY83-110, T4 – KTY84-130)
Motor with brake (no coding – without brake)
Connector type (no coding – upright to motor shaft) S1 – rectangular to shaft, S2 – rectangular to rearwards, S3 – rectangular to sides, S4 – rectangular rotary
Ingress protection V – IP65, W – IP67 (no coding – IP64)
Stall torque (0205 = 2,05 Nm)
Standard connections for motor connectors
ytec
2 term3 sin+4 cos–5 ref+6 term7 sin–8 cos+9 ref–
A UB VC W
PE1 Br+2 Br–
MotorResolver
1 U2 PE3 W4 VA Br+B Br–C ReservedD Reserved
Motor 1 cos-2 OV3 sin-4 Up5 DATA+6 N.C.7 term8 CLOCK+
9 cos+10 SENSE OV11 sin+12 SENSE Up13 DATA-14 term15 CLOCK+
EnDAT, Hiperface2 term3 sin+4 cos–5 ref+6 term7 sin–8 cos+9 ref–
Resolver
(for AKD, TGA and TGP servoamplifiers)
Motor type T – standard H – segment type N – new line of segment motors
Motor size (0–8)
DC intermediate circuit voltage (36, 320, 560 V)
Shaft with keyway (no coding – without keyway)
K – cable bushings
Other substandards

Dimensions of connectors
Streight connectors
sensor motor
Rectangular connectors (S1, S2, S3, S4)
motor
Ytec connectors
Servomotors
12—3
sensor

TGN2 servomotors 0.28–0.95 NmMagnets Nd-Fe-B 36 VDC 320 VDC 560 VDC
TGN2-0028
TGN2-0054
TGN2-0075
TGN2-0095
TGN2-0028
TGN2-0054
TGN2-0075
TGN2-0095
TGN2-0028
TGN2-0054
TGN2-0075
TGN2-0095
Nominal torque MN Nm 0.25 0.51 0.72 0.93 0.25 0.48 0.68 0.85 0.25 0.48 0.68 0.85Nominal speed nN rpm 4000 3000 2500 1500 4500 4500 4500 4500 4500 4500 4500 4500Nominal power PN W 104 160 188 146 117 226 320 400 117 226 320 400Nominal current IN A 8 7.7 7.8 7.5 0.96 1.12 1.48 1.7 0.96 0.9 0.83 1.07Stall torque M0 Nm 0.28 0.54 0.75 0.95 0.28 0.54 0.75 0.95 0.28 0.54 0.75 0.95Stall current I0 A 8 7.6 7.7 7.3 0.97 1.17 1.54 1.82 0.97 0.93 0.86 1.15Peak torque Mmax Nm 1 2.1 2.7 3.1 1.1 2.2 3 3.8 1.1 2.2 3 3.8Peak current Imax A 33 33 31 25 4.5 5.4 7.1 8.4 4.5 4.3 3.9 5.3Max. speed mech. nmax rpm 12000 12000 12000 12000 12000 12000 12000 12000 12000 12000 12000 12000Torque constant KM Nm/A 0.04 0.07 0.1 0.13 0.29 0.46 0.49 0.52 0.29 0.58 0.88 0.83Voltage constant KE V/1000 rpm 2.2 4.3 5.9 7.8 17.5 28 29.5 31.5 17.5 35 53 50Motor poles 2p — 6 6 6 6 6 6 6 6 6 6 6 6Resistance 2 ph. R2Ph Ω 0.43 0.62 0.66 0.82 28.3 25.9 17 13.1 28.3 41.1 54 33.6Inductance 2 ph. L2Ph mH 0.28 0.56 0.7 0.93 18.9 23.8 17.8 14.9 18.9 37.7 57 38.2Inertia J kgcm2 0.05 0.07 0.09 0.11 0.05 0.07 0.09 0.11 0.05 0.07 0.09 0.11Mass without brake m kg 0.76 0.93 1.1 1.27 0.76 0.93 1.1 1.27 0.76 0.93 1.1 1.27Mass with brake mBr kg 1.2 1.37 1.54 1.71 1.2 1.37 1.54 1.71 1.2 1.37 1.54 1.71Brake torque MBr Nm 2 2 2 2 2 2 2 2 2 2 2 2
DimensionsType K K1 (brake) KE (EnDAT) KE1 (EnDAT+brake)TGN2-0028 67 mm 105 mm 131 mm 166 mmTGN2-0054 82 mm 120 mm 146 mm 181 mmTGN2-0075 97 mm 135 mm 161 mm 196 mmTGN2-0095 112 mm 150 mm 176 mm 211 mm
Length�of�motor�with�Hiperface�sensor�is�the�same�like�legth�of�motor�with�EnDat�sensor.��In�some�types�of�motor�can�be�smaller.

Dimensions of TGN2 with ytec connectors
Dimensions of TGN2 with cable bushings
Dimensions of TGN2 with standard connectors
Servomotors
4—5
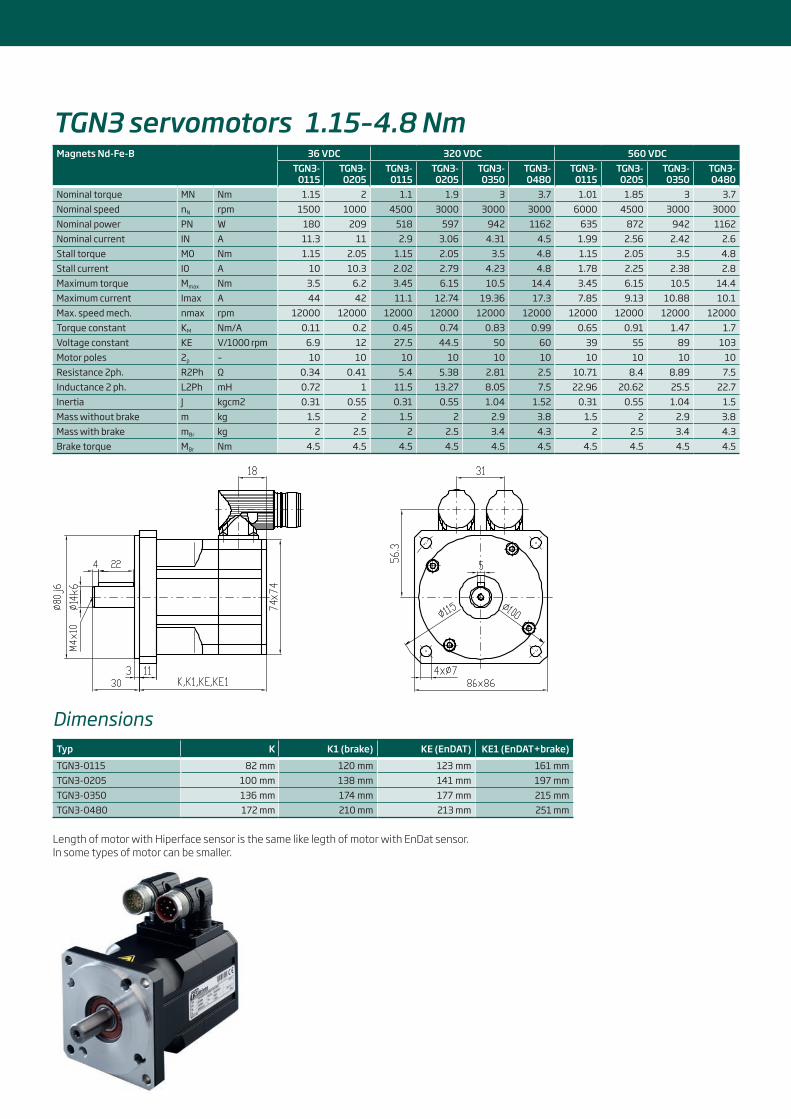
TGN3 servomotors 1.15–4.8 NmMagnets Nd-Fe-B 36 VDC 320 VDC 560 VDC
TGN3- 0115
TGN3- 0205
TGN3- 0115
TGN3- 0205
TGN3- 0350
TGN3- 0480
TGN3- 0115
TGN3- 0205
TGN3- 0350
TGN3- 0480
Nominal torque MN Nm 1.15 2 1.1 1.9 3 3.7 1.01 1.85 3 3.7Nominal speed nN rpm 1500 1000 4500 3000 3000 3000 6000 4500 3000 3000Nominal power PN W 180 209 518 597 942 1162 635 872 942 1162Nominal current IN A 11.3 11 2.9 3.06 4.31 4.5 1.99 2.56 2.42 2.6Stall torque M0 Nm 1.15 2.05 1.15 2.05 3.5 4.8 1.15 2.05 3.5 4.8Stall current I0 A 10 10.3 2.02 2.79 4.23 4.8 1.78 2.25 2.38 2.8Maximum torque Mmax Nm 3.5 6.2 3.45 6.15 10.5 14.4 3.45 6.15 10.5 14.4Maximum current Imax A 44 42 11.1 12.74 19.36 17.3 7.85 9.13 10.88 10.1Max. speed mech. nmax rpm 12000 12000 12000 12000 12000 12000 12000 12000 12000 12000Torque constant KM Nm/A 0.11 0.2 0.45 0.74 0.83 0.99 0.65 0.91 1.47 1.7Voltage constant KE V/1000 rpm 6.9 12 27.5 44.5 50 60 39 55 89 103Motor poles 2p – 10 10 10 10 10 10 10 10 10 10Resistance 2ph. R2Ph Ω 0.34 0.41 5.4 5.38 2.81 2.5 10.71 8.4 8.89 7.5Inductance 2 ph. L2Ph mH 0.72 1 11.5 13.27 8.05 7.5 22.96 20.62 25.5 22.7Inertia J kgcm2 0.31 0.55 0.31 0.55 1.04 1.52 0.31 0.55 1.04 1.5Mass without brake m kg 1.5 2 1.5 2 2.9 3.8 1.5 2 2.9 3.8Mass with brake mBr kg 2 2.5 2 2.5 3.4 4.3 2 2.5 3.4 4.3Brake torque MBr Nm 4.5 4.5 4.5 4.5 4.5 4.5 4.5 4.5 4.5 4.5
DimensionsTyp K K1 (brake) KE (EnDAT) KE1 (EnDAT+brake)TGN3-0115 82 mm 120 mm 123 mm 161 mmTGN3-0205 100 mm 138 mm 141 mm 197 mmTGN3-0350 136 mm 174 mm 177 mm 215 mmTGN3-0480 172 mm 210 mm 213 mm 251 mm
Length�of�motor�with�Hiperface�sensor�is�the�same�like�legth�of�motor�with�EnDat�sensor.��In�some�types�of�motor�can�be�smaller.

TGN4 servomotors 5.1–11.3 NmMagnets Nd-Fe-B 320 VDC 560 VDC
TGN4- 0510
TGN4- 0750
TGN4- 0960
TGN4- 1130
TGN4- 0510
TGN4- 0750
TGN4- 0960
TGN4- 1130
Nominal torque MN Nm 4.2 6.1 7.7 8.8 4.2 6.1 7.7 8.8Nominal speed nN rpm 3000 3000 3000 3000 3000 3000 3000 3000Nominal power PN W 1319 1916 2419 2764 1319 1916 2419 2764Nominal current IN A 7.01 8.77 10.84 10.7 3.94 5.14 6.03 6.9Stall torque M0 Nm 5.1 7.5 9.6 11.3 5.1 7.5 9.6 11.3Stall current I0 A 6.78 8.89 10.75 11 3.81 5.21 5.98 7.1Maximum torque Mmax Nm 15.3 22.5 28.8 34 15.3 22.5 28.8 34Maximum current Imax A 31 40.68 49.17 41 17.42 23.85 27.38 27Max. speed mech. nmax rpm 9000 9000 9000 9000 9000 9000 9000 9000Torque constant KM Nm/A 0.75 0.84 0.89 1.03 1.34 1.44 1.6 1.59Voltage constant KE V/1000 rpm 45.5 51 54 62 81 87 97 96Motor poles 2p – 10 10 10 10 10 10 10 10Resistance 2 ph. R2Ph Ω 1.24 0.78 0.62 0.61 3.98 2.29 2 1.49Inductance 2 ph. L2Ph mH 6.78 4.85 3.64 3.8 21.75 14.24 11.93 9.1Inertia J kgcm2 2.04 3.26 4.49 5.7 2.04 3.26 4.49 5.7Mass without brake m kg 3.8 5.1 6.4 7.7 3.8 5.1 6.4 7.7Mass with brake mBr kg 4.6 5.9 7.2 8.5 4.6 5.9 7.2 8.5Brake torque MBr Nm 9 9 9 9 9 9 9 9
DimensionsTyp K K1 (brake) KE (EnDAT) KE1 (EnDAT+brake)TGN4-0510 113 mm 154 mm 150 mm 191 mmTGN4-0750 143 mm 184 mm 180 mm 221 mmTGN4-0960 173 mm 214 mm 210 mm 251 mmTGN4-1130 203 mm 244 mm 240 mm 281 mm
Length�of�motor�with�Hiperface�sensor�is�the�same�like�legth�of�motor�with�EnDat�sensor.��In�some�types�of�motor�can�be�smaller.
Servomotors
6—7

TGN5 servomotors 12–24 NmMagnets Nd-Fe-B 320 VDC 560 VDC
TGN5- 1200
TGN5- 1600
TGN5- 2000
TGN5- 2400
TGN5- 1200
TGN5- 1600
TGN5- 2000
TGN5- 2400
Nominal torque MN Nm 10.5 14.6 18 22 10.5 14.6 16 20Nominal speed nN rpm 3000 2000 1500 2000 3000 3000 3000 3000Nominal power PN W 3298 3057 2827 4607 3298 4586 5026 6283Nominal current IN A 14.7 12.6 11.8 16.4 8.3 9.9 11.5 15.9Stall torque M0 Nm 12 16 20 24 12 16 20 24Stall current I0 A 14.2 12.6 11.6 15.4 8 10.1 11.6 15.4Maximum torque Mmax Nm 36 48 60 72 36 48 60 72Maximum current Imax A 53 44 40 53 29 36 40 53Max. speed mech. nmax rpm 9000 9000 9000 9000 9000 9000 9000 9000Torque constant KM Nm/A 0.84 1.27 1.72 1.55 1.51 1.59 1.72 1.55Voltage constant KE V/1000 rpm 51 77 104 94 91 96 104 94Motor poles 2p – 10 10 10 10 10 10 10 10Resistance 2ph. R2Ph Ω 0.42 0.57 0.72 0.45 1.33 0.88 0.72 0.45Inductance 2 ph. L2Ph mH 3.4 4.9 6.3 4.1 10.9 7.5 6.3 4.1Inertia J kgcm2 9.6 13.3 17.1 21 9.6 13.3 17.1 21Mass without brake m kg 7.5 9.5 11.5 13.5 7.5 9.5 11.5 13.5Mass with brake mBr kg 8.6 10.6 12.6 14.6 8.6 10.6 12.6 14.6Brake torque MBr Nm 18 18 18 18 18 18 18 18
DimensionsTyp K K1 (brake) KE (EnDAT) KE1 (EnDAT+brake)TGN5-1200 143.5 mm 179.5 mm 177 mm 222 mmTGN5-1600 173.5 mm 209.5 mm 207 mm 252 mmTGN5-2000 203.5 mm 239.5 mm 237 mm 282 mmTGN5-2400 233.5 mm 269.5 mm 267 mm 312 mm
Length�of�motor�with�Hiperface�sensor�is�the�same�like�legth�of�motor�with�EnDat�sensor.��In�some�types�of�motor�can�be�smaller.

Servomotors
8–9
TGN6 servomotors 18–44 Nm
DimensionsTyp K K1 (brake) KE (EnDAT) KE1 (EnDAT+brake)TGN6-1800 158 mm 222 mm consult consultTGN6-2400 183 mm 247 mm consult consultTGN6-3000 208 mm 272 mm consult consultTGN6-3800 233 mm 297 mm consult consultTGN6-4400 258 mm 322 mm consult consult
Length�of�motor�with�Hiperface�sensor�is�the�same�like�legth�of�motor�with�EnDat�sensor.��In�some�types�of�motor�can�be�smaller.�In�some�types�of�motor�can�be�smaller.
Magnets Nd-Fe-B 560 VDCTGN6-1800 TGN6-2400 TGN6-3000 TGN6-3800 TGN6-4400
Nominal torque MN Nm 14.8 13 20 17 25.3 21 29 25 36.5 30Nominal speed nN rpm 2000 3000 2000 3000 2000 3000 2000 3000 2000 3000Nominal power PN W 3100 4084 4189 5341 5299 6597 6074 7854 7644 9425Nominal current IN A 8.6 11 10.7 13.8 12.9 16.2 15 19.7 17.3 24.4Stall torque M0 Nm 18 18 24 24 30 30 38 38 44 44Stall current I0 A 8.9 12.2 10.8 15.3 12.8 17.8 16.7 23.9 17.7 28.3Peak torque Mmax Nm 51 51 72 72 90 90 114 114 132 132Peak current Imax A 33 45 42 60 46 64 64 93 64 102Max. speed mech. nmax rpm 6000 6000 6000 6000 6000 6000 6000 6000 6000 6000Torque constant KM Nm/A 2 1.47 2.2 1.57 2.4 1.69 2.3 1.59 2.5 1.55Voltage constant KE V/1000 rpm 123 89 134 95 142 102 138 96 150 94Motor poles 2p – 10 10 10 10 10 10 10 10 10 10Resistance 2 ph. R2Ph Ω 1.19 0.62 0.81 0.41 0.63 0.33 0.52 0.25 0.49 0.19Inductance 2 ph. L2Ph mH 13.7 7.2 10.8 5.5 9.2 4.7 7.2 3.5 7 2.8Inertia J kgcm2 18.5 18.5 25.6 25.6 32.7 32.7 39.9 39.9 47 47Mass without brake m kg 9.2 9.2 13.8 13.8 18 18 20.2 20.2 25.9 25.9Mass with brake mBr kg 13.7 13.7 18.3 18.3 22.5 22.5 24.7 24.7 30.4 30.4Brake torque MBr Nm 36 36 36 36 36 36 36 36 36 36

TGN7 servomotors 30–60 Nm
DimensionsTyp K K1 (brake) KE (EnDAT) KE1 (EnDAT+brake)TGN7-3000 181 mm 245 mm 201 mm 265 mmTGN7-4000 211 mm 275 mm 231 mm 295 mmTGN7-5000 241 mm 305 mm 261 mm 325 mmTGN7-6000 271 mm 335 mm 291 mm 355 mm
Length�of�motor�with�Hiperface�sensor�is�the�same�like�legth�of�motor�with�EnDat�sensor.��In�some�types�of�motor�can�be�smaller.
Magnets Nd-Fe-B 560 VDCTGN7-3000 TGN7-4000 TGN7-5000 TGN7-6000
Nominal torque MN Nm 26.1 23.0 32.8 26.7 40.4 30.0 44.0 27.3Nominal speed nN rpm 2000 3000 2000 3000 2000 3000 2000 3000Nominal power PN W 5466 7225 6869 8387 8461 9424 9215 8576Nominal current IN A 13.2 17.2 15.4 21.0 21.8 24.4 19.7 16.2Stall torque M0 Nm 30 30 40 40 50 50 60 60Stall current I0 A 13.1 18.1 16.7 26.9 22.7 31.5 24 30Peak torque Mmax Nm 85 85 120 120 150 150 180 180Peak current Imax A 46 64 59 95 79 109 82 102Max. speed mech. nmax rpm 6000 6000 6000 6000 6000 6000 6000 6000Torque constant KM Nm/A 2.3 1.65 2.4 1.49 2.2 1.59 2.5 2Voltage constant KE V/1000
rpm139 100 145 90 133 96 151 121
Motor poles 2p – 10 10 10 10 10 10 10 10Resistance 2 ph. R2Ph Ω 0.64 0.33 0.43 0.17 0.25 0.13 0.24 0.16Inductance 2 ph. L2Ph mH 10.1 5.2 7.8 3.1 4.9 2.6 5.1 3.3Inertia J kgcm2 49.5 49.5 69 69 88 88 107 107Mass without brake m kg 15.5 15.5 20.2 20.2 24 24 30.5 30.5Mass with brake mBr kg 18.5 18.5 23.2 23.2 27 27 33.5 33.5Brake torque MBr Nm 36 36 36 36 36 36 36 36

Servozesilovače AKD
Controlling of AKD servoamplifiers
�EtherCAT�or�CANopen�communication�interface��Service�channel�Modbus/TCP�(used�for�parameter�setting)�Analogue�input�+/-10V�(16�bits)�Analogue�output�+/-10V�(16�bits)�Digital�control�inputs�(7)�and�outputs�(2)�–�activation�of�programmed�position�profiles�Control�signals�for�step�motors�„STEP“�and�„DIRECTION“Control�in�the�electronic�gearing�mode
Feedbacks�ResolverEnDAT�(single-turn�or�multi-turn)Hiperface�(single-turn�or�multi-turn)A�sensor�with�sincos�signals�An�incremental�sensor�with�commutation�signals.�The�possibility�to�simultaneously�connect�two�sensors�(e.g.�resolver�and�incremental�sensor)
Performance specification
�Digital�current�loop�(0,67�μs),�speed�loop�(62,5�μs)�and�position�loop�(125�μs)�ensure�high�motion�dynamics�and�repeatibility�of�demand�motion�tasks�Servoamplifiers�AKD�3�x�400�V�are�equipped�with�anti-interference�network�filter�Control�of�the�motors�holding�brake�Input�(STO�–�Safe�Torque�Off)�to�block�the�reverse�–�SIL2�by�IEC�61508�The�versatility�of�using�increases��the�wide�spectrum�of�supply�voltages��3�x�120�–�3�x�240�V�for�the�230V�version�and�3�x�240�–�3�x�480�V�and�CE,�UL�and�cUL�certification�Simple�Grafical�User�Interface�(GUI)-WorkBench�is�designated�to�expedite�and�streamline�the�user‘s�experience�with�AKD.�From�easy�application�selection�and�reduced�math,�to�a�sleek�sixchannel�scope.�WorkBench�also�makes�auto-tunning�the�AKD�high-performance�drive�with�TG�mo-tors�very�simple.
AKD digital servoamplifiers
AKD digital servoamplifiers are designed for driving of rotary and linear synchronous servomotors. Servoamplifiers are equipped with multiple inputs for communication with many types of positioning sensors. This gives us the possibility to find an optimum priced solution of a used feedback sensor and of a servomotor application.
Digital servoamplifiers AKD are designed to be easily connected to different control systems, because of this the servoamplifiers can be used in many applications. In relation to the application and control system used, it is possible to utilize the integrated motion functions or to use only the basic functions of control loops.
Servoamplifiers
10–11

Operating data – 230 VRated data DIM AKD-P00306 AKD-P00606 AKD-P01206 AKD-P02406Rated supply voltage V~ 3× 108—264 V / 50—60 Hz
1× 108—264 V / 50—60 Hz3× 240 V ±10 %
Rated installed power for S1 operation kVA 1.2 2.38 3.82 7.6Nominal current (±3 %)– at rated voltage 120 V Aef 3 6 12 –– at rated voltage 240 V Aef 3 6 12 24Maximum current (max. 5s, ±3 %) Aef 9 18 30 48Continuous power regen circuit (RBint) W – – 100 100Continuous power regen circuit (RBext) max. Ws 60 (with 120 V)
20 (with 240 V)60 (with 120 V) 20 (with 240 V)
160 (with 120 V) 55 (with 240 V)
180 (with 120 V) 60 (with 240 V)
Continuous power regen circuit (RBext) max. kW 0.77 1.5 3 6Peak power regen circuit (RBext) max. kW 5.4 5.4 5.4 11.8Dimensions– Height mm 168 168 195 250– Width mm 57 57 76 100– Depth mm 153 153 186 230– Depth with connectors mm 184 184 215 265
Operating data – 3 x 400 VRated data DIM AKD-P00307 AKD-P00607 AKD-P01207 AKD-P02407Rated supply voltage V~ 3× 216—528 V / 50—60 HzRated installed power for S1 operation kVA 2.24 4.49 7.65 15.2Nominal current (±3 %) Aef 3 6 12 24Maximum current (max. 5s, ±3 %) Aef 9 18 30 48Continuous power regen circuit (RBint) W 80 100 100 200Breaking energy of regen circuit capacitor Ws 5 (with 240 V)
35 (with 400 V) 20 (with 480 V)
5 (with 240 V) 35 (with 400 V) 20 (with 480 V)
10 (with 240 V) 70 (with 400 V) 40 (with 480 V)
15 (with 240 V) 110 (with 400 V) 60 (with 480 V)
Continuous power regen circuit (RBext) max.at 240 V / 400 V a 480 V kW 0.77 / 1.5 1.5 / 3 3 / 6 6 / 12Peak power regen circuit (RBext) max. kW 5.4 / 21.4 5.4 / 21.4 5.4 / 21.4 7.7 / 30.6Dimensions– Height mm 256 256 256 310– Width mm 70 70 70 105– Depth mm 186 186 186 229– Depth with connectors mm 221 221 221 264
Servoamplifier – 230 VServoamplifier – 3× 400 VAKD P01207 AKD P00306

12–13
Notes:

TG Drives, s. r. o.Jeneweinova 37CZ 617 00 Brno
www.tgdrives.czTel.: +420 545 234 935Fax: +420 545 234 735E-mail: [email protected]
11/2
011
Servomotors Servoamplifiers Gearboxes Control systems