Embed Size (px)
Citation preview
30 PERVASIVEcomputing Published by the IEEE CS n1536-1268/09/$25.00©2009IEEE
E n v i r o n m E n t a l S u S t a i n a b i l i t y
Sensor and actuator networks: Protecting Environmentally Sensitive areas
Tim Wark, Chris Crossman, and Philip ValenciaCSIRO ICT Center, Brisbane
Dave Swain and Greg Bishop-HurleyCSIRO Livestock Industries Rockhampton
Rebecca HandcockCSIRO Livestock Industries Floreat
Advances in wireless sensor and actuator networks (WSANs) can enable the spatial control of large herds of cattle through virtual fencing, to protect environmentally sensitive regions from damage.
O ur planet is at risk of signifi-cant and irreversible damage. Increasing population levels and rapid natural resource consumption place an immense
strain on our environment. Given clear evidence of significant changes in global climate condi-tions affecting a wide range of ecosystems,1 we must find ways to better manage our natural resources if we are to sustain our lifestyle.
Our work focuses on protecting environmen-tally sensitive areas threatened by damage from cattle herds. Many areas exist in which installing conventional fencing is cost and labor prohibi-
tive, such as along river banks, scattered riparian areas, or steep terrain regions. Such ar-eas are either large areas inap-propriate for grazing or sen-sitive areas where cattle can cause significant damage, such as erosion along river banks or the destruction of valuable plant species in riparian zones. With an estimated global pop-ulation of more than 1.3 billion cattle covering grassland areas totaling 10 million square km,2 the global impact of animal ag-
riculture is enormous and poor livestock man-agement can result in significant and widespread environmental degradation in sensitive areas.
Wireless sensor networks (WSNs)—large networks of embedded devices, containing mi-crocomputers, radios, and sensors—provide the platform for a low-cost, radically new instrument to measure and understand the natural world. Several recent studies have focused on building reliability into long-term, environmental sensor networks,3 and others have focused on embed-ding mobile nodes with animals and tracking them. Our systems not only monitor herds and the surrounding environment but also can change animal behavior to assist environmental steward-ship. We achieve this through virtual fencing—keeping cattle away from selected areas without a physical fence. This article addresses the problem of sustainable agriculture and presents our use of embedded-device networks to protect environ-mentally sensitive areas.
observing animals and the EnvironmentPreviously we developed a large-scale, outdoor pervasive computing system that measures the state of a complex agricultural system.4 We de-signed the system to measure a wide range of variables to simultaneously try and understand the state of climate, soil, pasture, and animals.
Virtual fencing extends our initial work so that actuation decisions are made in the net-work to support the stewardship of the sur-rounding environment. We focus on models for relating position, velocity, and inertial observa-
January–march2009 PERVASIVEcomputing 31
tions from animals to specific levels of an animal’s state. In particular, we fo-cus on two classes of state: an individ-ual animal’s behavior and an animal’s relation to a virtual fence line border-ing an environmentally sensitive area. This article primarily deals with the latter state.
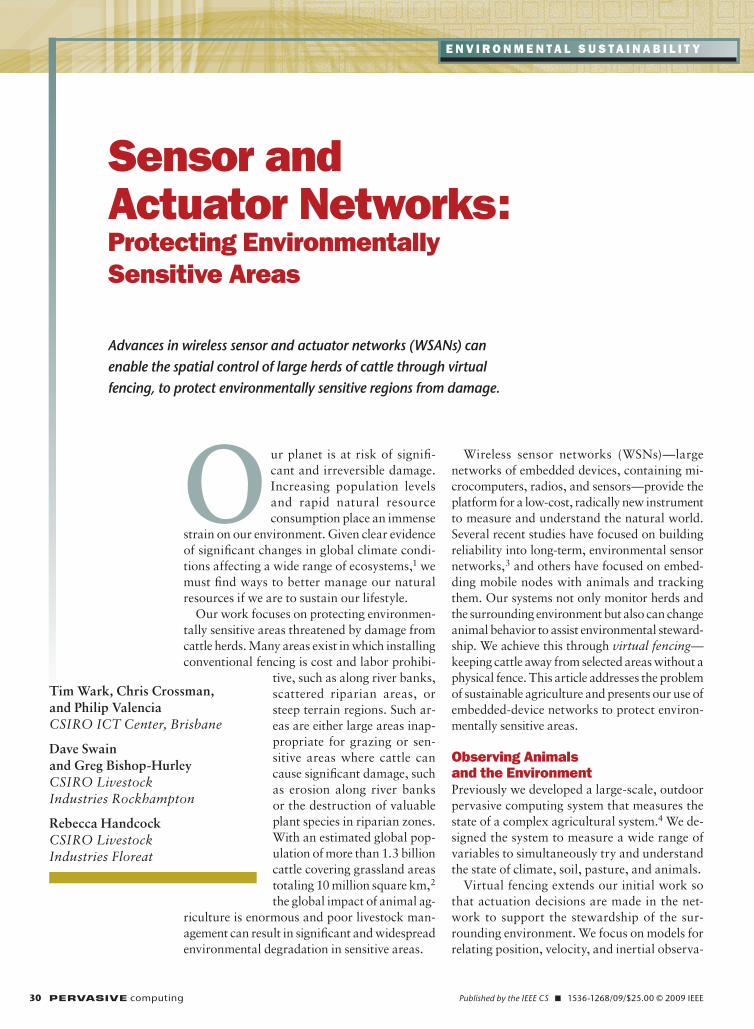
Our system comprises a network of mobile embedded devices (nodes) de-signed to observe the state of large cat-tle herds while monitoring the state of the surrounding natural environment. All mobile nodes can undertake actua-tion on the basis of observations made by the node or other network nodes. Figure 1 shows a high-level illustra-tion of the path from observations to actuation.
To obtain observations from the en-vironment, we started by using static-node networks that measure air tem-perature and soil moisture and in which measurements are multihopped back to base every few minutes.4 By deploying nodes in grid-like patterns, roughly 150 meters apart, we clearly identified pasture regions that hold high and low amounts of water content. To increase our observations’ spatial coverage, we investigated using small camera nodes that return compressed images of spe-cific pasture areas.4 Our current work investigates the level of correlation between soil moisture measurements and camera observations of grass condition.
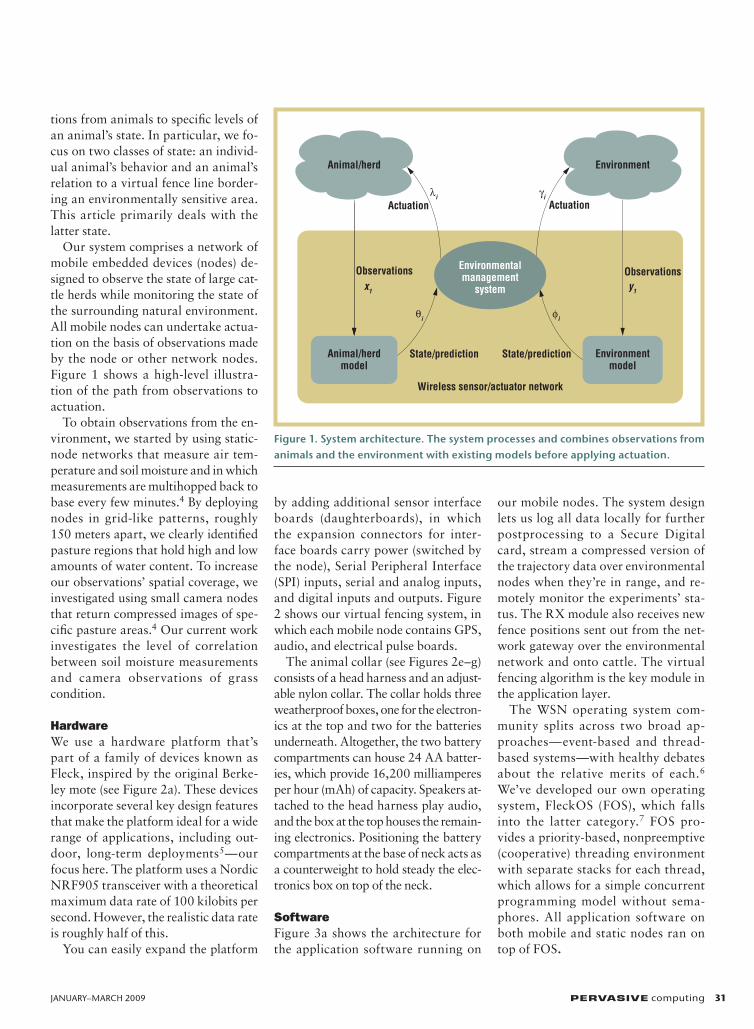
HardwareWe use a hardware platform that’s part of a family of devices known as Fleck, inspired by the original Berke-ley mote (see Figure 2a). These devices incorporate several key design features that make the platform ideal for a wide range of applications, including out-door, long-term deployments5—our focus here. The platform uses a Nordic NRF905 transceiver with a theoretical maximum data rate of 100 kilobits per second. However, the realistic data rate is roughly half of this.
You can easily expand the platform
by adding additional sensor interface boards (daughterboards), in which the expansion connectors for inter-face boards carry power (switched by the node), Serial Peripheral Interface (SPI) inputs, serial and analog inputs, and digital inputs and outputs. Figure 2 shows our virtual fencing system, in which each mobile node contains GPS, audio, and electrical pulse boards.
The animal collar (see Figures 2e–g) consists of a head harness and an adjust-able nylon collar. The collar holds three weatherproof boxes, one for the electron-ics at the top and two for the batteries underneath. Altogether, the two battery compartments can house 24 AA batter-ies, which provide 16,200 milliamperes per hour (mAh) of capacity. Speakers at-tached to the head harness play audio, and the box at the top houses the remain-ing electronics. Positioning the battery compartments at the base of neck acts as a counterweight to hold steady the elec-tronics box on top of the neck.
SoftwareFigure 3a shows the architecture for the application software running on
our mobile nodes. The system design lets us log all data locally for further postprocessing to a Secure Digital card, stream a compressed version of the trajectory data over environmental nodes when they’re in range, and re-motely monitor the experiments’ sta-tus. The RX module also receives new fence positions sent out from the net-work gateway over the environmental network and onto cattle. The virtual fencing algorithm is the key module in the application layer.
The WSN operating system com-munity splits across two broad ap-proaches—event-based and thread-based systems—with healthy debates about the relative merits of each.6 We’ve developed our own operating system, FleckOS (FOS), which falls into the latter category.7 FOS pro-vides a priority-based, nonpreemptive (cooperative) threading environment with separate stacks for each thread, which allows for a simple concurrent programming model without sema-phores. All application software on both mobile and static nodes ran on top of FOS.
Animal/herdmodel
Environmentmodel
Actuation Actuation
State/prediction State/prediction
Observations Observationsy1x1
Wireless sensor/actuator network
θi φi
λi γi
Animal/herd Environment
Environmentalmanagement
system
Figure 1. System architecture. The system processes and combines observations from animals and the environment with existing models before applying actuation.

32 PERVASIVEcomputing www.computer.org/pervasive
EnvironmEntal SuStainability
virtual Fencing ProtocolVirtual fencing seeks to extend the basic principle of the commonly used electric fence. Instead of controlling animal lo-cation using a physical fence, we use a combination of auditory and mild elec-trical stimuli applied by a position-aware device worn by the animal. Strict animal ethics requirements guide all such ex-periments to ensure animal welfare. The ethics behind this approach parallel the
principle behind conventional electric fences in which animals have a visual as-sociation with the fence location. With the virtual fence, a quiet acoustic sound identifies the fence’s location. When the animals cross this virtual fence, they receive a mild electrical stimuli. They quickly learn to associate this stimuli with the sound, which influences their future actions.
Virtual fencing isn’t a new concept—
the first papers8 on the topic appeared in 1990 before commercial GPS was operational. In the late 1990s and early 2000s, researchers in the US studied small-scale experimentation with GPS positioning.9 Recent work has inves-tigated the application of a broader range of stimuli types and their effects on animals’ abilities to learn fence locations.10
We seek to expand recent experi-
(b) (c)(a)
(e) (f)
(g)
(d)
Fleck3 mainboard
GPS SD card daughterboard
Audio daughterboard
Zapper daughterboard
Collar
Antenna
Rubber seal
Weather resistant housing
Figure 2. Hardware components. The mobile animal nodes contain the (a) mainboard; (b) GPS/Secure Digital card board; (c) audio board; (d) electrical-stimuli board; (e) housing box; and (f) collar (containing the electronics box and additional housings for batteries). (g) All hardware components for the virtual fencing collar.

January–march2009 PERVASIVEcomputing 33
ments by solving the remaining is-sues with virtual fencing—the ability to manage commercial herd sizes in a wide range of natural environments over long time periods. To achieve this, we emphasized improved techniques for applying stimuli to animals based on estimates of their behavior relative to virtual fence lines.
Assuming virtual fence lines are comprised of piecewise straight lines, we derive three main observations from the GPS measurements in Figure 3b in which v is the animal’s velocity vector, n is the shortest distance to the virtual fence line, and is the angle between the animal heading and the virtual fence line. These three observa-tions act as inputs for a behavior-based state machine (see Figure 3c), in which states are based on a finite set of known animal responses to virtual fence lines. Within each state, we’ve developed a different strategy for applying audio or electrical stimuli to get animals to leave the exclusion zone (EZ) in the most ef-fective manner.
We found the flight-response state par-ticularly interesting. This is a rare case, in which animals run into the EZ rather than pausing or turning back. When this
happens, the system will automatically deactivate the virtual fence until the de-sire to rejoin the herd prompts the ani-mals to cross back into the non-EZ.
ExperimentsWe performed a series of multiday ex-periments using embedded devices to keep cattle away from environmentally sensitive areas. Figure 4 shows our ex-periments, conducted at Belmont Re-search Station, a 3,260 hectare station on the eastern coast of Queensland, Australia. The research station is adja-cent to the Fitzroy, a major river featur-ing numerous pasture types and native species. This area provided an ideal en-vironment to test pervasive devices on environmental sustainability issues.
real-time monitoringReal-time monitoring of the system’s state was crucial for ethical reasons and to validate the system’s performance. So, we designed the system to spatially control the animal herds’ location and return real-time information about their state. We monitored the herd us-ing environmental nodes that provided a multihop backlink to the base.
One of the first major uses of WSNs for animal monitoring was in zebra tracking as part of the ZebraNet proj-ect.11 In this system, animal GPS data taken every few minutes would hop in a peer-to-peer fashion to other animals when they came in range. (More sophis-ticated systems for ad hoc routing of data through large networks of mobile
(b) (c)(a)
VFalgorithm
GPS Module
TXModule
SD CardLogging
Networking stack
Beacon RXModule
Compression
vθ
Virtualfenceline
Exclusion zone(EZ) Crossing
into EZ
Flightresponse
LeavingEZ
Normalactivity
Staying in EZ
Audio stimulus
Electricalstimulus
Stop stimulus
Deactivate stimuli until back in non-EZ
Figure 3. Virtual fencing protocol. (a) The software module architecture, (b) illustration of observations for a single animal, and (c) simplified version of the state machine used by the virtual fencing algorithm. The text outside the nodes refers to events taking place while in the current state.
Figure 4. Cattle herd behind virtual fence line. The dashed red line represents the virtual fence in an environmentally sensitive region of Belmont Research Station.

34 PERVASIVEcomputing www.computer.org/pervasive
EnvironmEntal SuStainability
cattle nodes have also been proposed to make a trade-off between the power used by animal-mounted de-vices and the power used by fixed sinks for data uploading.12,13)
Unlike the ZebraNet project, we wanted to return trajectory infor-mation from each ani-mal as often as possible to let us closely monitor VF experiments dur-ing these early, long-term experiments. To achieve this, we devel-oped an algorithm that performs online sum-marization of position data within the buffer, where the algorithm naturally accommo-dates data input (GPS sample rate) and out-put rate (opportunity to upload to sink) mismatch, and also provides a delay-tolerant approach to data transport. If the trajectory buf-fer is full, the algorithm discards those samples containing the least amount of information first.
Given our device’s memory limita-tions, we chose a buffer size of 15 posi-tion samples, which let us take position samples every 10 seconds, assuming that the animal nodes would sometimes disconnect from the static sink nodes for several minutes. Based on this pro-cedure, our system backend lets us con-tinually visualize the state of the herd within Google Earth (see Figure 5).
System performanceOur current experiments involve keeping herds of approximately 40 cattle away from environmentally sensitive regions. In our initial exper-iments, we defined virtual fence lines that separate acceptable grazing areas from sensitive regions or EZs. Figure 6a illustrates the results of a multiday
trial and overlays all trajectories of animals near the fence line along with the locations where we applied audio and electrical stimuli. Because of the system’s learning process, animals would sometimes go as much as 5 me-ters into an EZ before turning around. In practice, we’d recommend placing a virtual fence line 5 to 10 meters away from a sensitive zone to account for the learning process as well as allow for the typical GPS error rate of plus or minus three meters.
Figure 6b shows another perspec-tive of the system’s performance for an area of roughly 1.2 km × 1.2 km. This diagram provides a color map of vari-ous regions’ occupancy along a virtual fence line. It shows that cattle tend to group up when attempting to cross a virtual fence line. However, cattle gen-erally spread out across larger areas in the allowable grazing regions. An area of occupancy roughly 500 meters into the EZ is the result of a rare case of flight response, in which two animals
ran through the virtual fence line.
Closing the loopEarth observation data offers valuable, complementary infor-mation to sensor net-work measurements. Whereas sensor net-works can provide data measurements at a very high temporal resolu-tion, satellite earth ob-servation systems such as those in Figure 7 can provide measure-ments at a broad spa-tial scale that wouldn’t be cost effective with ground-based sensor network technology. By combining these measurement sources, the opportunity arises to interpolate sparse observations to a much
finer temporal resolution over the vast spatial extents made possible with sat-ellite observation.
In the case of environmental virtual fencing, earth observation data pro-vides the means to close the loop on the whole environmental management system. We now have access to increas-ingly sophisticated methods14 that can provide estimates of parameters—such as pasture species, biomass, quality, and height parameters—over large spatial extents, down to the finest spa-tial resolution of the multispectral data (for example, 4 m2 for the Ikonos satel-lite). Estimates of physical parameters, such as pasture growth rate,15 combine multispectral measurements with local meteorological data, such as rainfall, temperature, or soil moisture, in com-plex growth models that we can refine for particular pasture types in defined geographical regions.
Subsequently, we could use this in-formation to identify overgrazing of pasture areas, ongoing damage to river
Figure 5. Google Earth interface used during virtual fencing trials. Data coming back over environmental nodes gives the position of cattle as well as their behavior state and status of actuation.

January–march2009 PERVASIVEcomputing 35
banks, or signs of stress from overuse in riparian zones. As environmental sen-sor networks become more ubiquitous in both the static environment and on animals, we’ll be able to protect new geographic zones by communicating information over environmental sen-sor networks about new virtual fence lines. We could essentially move large animal herds across the landscape in a timely fashion to minimize the envi-ronmental damage while maintaining sufficient animal inputs.
O ur experiments demon-strate the feasibility of spatial control of large cattle herds using sensor
and actuator networks and provide a potentially new approach to environ-mental protection in cattle production systems. Despite these early successes, we will need to run longer experiments over several months to fully investigate the technical and animal science chal-lenges that lie ahead.
Integrating these types of systems with earth observation information will help us better understand and manage the natural environment, and
we’ll undoubtedly see these systems become more ubiquitous as issues around sustainable agriculture and environmental stewardship become increasingly important. As we gain confidence in and knowledge about the types of real-time decisions that sensor networks in the environment can make, we might well see a radical
shift in the future management of farm enterprises.
ACknowlEDGmEnTSTheauthorsthankLesOvers,StephenBros-nan,andJohnWhithamfortheirassistanceinhardwaredevelopment,andKarinaTateandchrisO’neilfortheirassistanceinrunningexperiments.
(a)9,850
–6,720
–6,725
–6,730
–6,735
–6,740
9,855 9,860 9,865
Northing (m)
Virtual fenceline
× 106
× 1059,870 9,875 9,880 9,885
East
ing
(m)
(b)2.322
–7.4298
–7.4299
–7.4300
–7.4301
–7.4302
–7.4303
200
150
100
50
02.324 2.326 2.328
Easting (m)
2.330 2.332 2.334
Nor
thin
g (m
)
No stimuliAudioZap
Fixedfenceline
Exclusion zone
Exclusion zone
Figure 6. Virtual fence performance. (a) Animal trajectories against a single virtual fence line, along with locations of all stimuli. (b) Color map showing the occupancy of various regions around a virtual fence line.
0 40 80 160 320240m
Airstrip
3a
3b
4a
4b
7
55a
10
234
11
2b
Figure 7. Pasture biomass at Belmont Research Station. Green indicates high biomass determined from red and near-infrared remote-sensing data from the SPoT-5 satellite sensor. The blue line indicates the GPS track of one cow kept behind a virtual fence line (shown by a dashed red line).

36 PERVASIVEcomputing www.computer.org/pervasive
EnvironmEntal SuStainability
REFEREnCES 1. M. Heimann and M. Reichstein, “Terres-
trial Ecosystem Carbon Dynamics and Climate Feedbacks,” Nature, vol. 451, 2008, pp. 289–292.
2. Food and Agriculture Organization of
the United Nations (FAO), 2007, http:// faostat.fao.org.
3. G. Barrenetxea et al., “Sensorscope: Out-of-the-box Environmental Monitor-ing,” Information Processing in Sensor
Networks (IPSN), ACM/IEEE CS Press, 2008. pp. 332–343.
4. T. Wark et al., “Transforming Agriculture Through Pervasive Wireless Sensor Net-works,” IEEE Pervasive Computing, vol. 6, no. 2, 2007, pp. 50–57.
5. P. Corke et al., “Long-Duration Solar-Powered Wireless Sensor Networks,” Proc. 4th Workshop on Embedded Net-worked Sensors (EmNets), ACM Press, 2007, pp. 33–37.
6. R. von Behren, J. Condit, and E. Brewer, “Why Events are a Bad Idea (for High-Concurrency Servers),” Proc. 2003 HotOS Workshop, Usenix, 2003, p. 4.
7. P. Corke, “FOS—A New Operating Sys-tem for Sensor Networks,” Proc. Euro-pean Conf. Wireless Sensor Networks (EWSN), ACM Press, 2008.
8. A. Tiedemann, T. Quigley, and L. White, “Electronic (Fenceless) Control of Ani-mals,” Research Paper PNW-RP-510, US Department of Agriculture, 1999.
9. D. Anderson and C. Hale, “Animal Con-trol System Using Global Positioning and Instrumental Animal Conditioning,” US Patent 6,232,880, USDA, 2001.
10. Z. Butler et al., “From Robots to Animals: Virtual Fences for Controlling Cattle,” Int’l J. Robotics Research, vol. 25, 2006, pp. 485–508.
11. P. Zhang et al., “Hardware Design Expe-riences in Zebranet,” Proc. 2nd Int’l Conf. Embedded Networked Sensor Systems (SenSys), ACM Press, 2004, pp. 227–238.
12. M. Radenkovica and B. Wietrzyk, “Mobile Ad Hoc Networking Approach to Detecting and Querying Events Related to Farm Animals,” Proc. Int’l Conf. on Networking and Services, IEEE CS Press, 2006, p. 109.
13. B. Wietrzyk and M. Radenkovic, “Energy Efficiency in the Mobile Ad Hoc Networking Approach to Monitoring Farm Animals,” Proc. Sixth Int’l Conf. Networking (ICN 07), IEEE CS Press, 2007.
14. M. Hill et al., “Integration of Optical and Radar Classifications for Mapping Pas-ture Types in Western Australia,” IEEE Transactions on Geoscience and Remote Sensing, vol. 43, 2005, pp. 1665–1681.
15. M. Hill et al., “Estimation of Pasture Growth Rate in South Western Australia from NOAA AVHRRNDVI and Climate Data,” Remote Sensing of Environment, vol. 93, 2004, pp. 528–545.
theAuTHoRSTim Wark isaprincipalresearchscientistintheautonomousSystemsLabo-ratoryinthecommonwealthScientificandIndustrialresearchOrganiza-tion(cSIrO)InformationandcommunicationsTechnology(IcT)center.hisresearchinterestsincludedistributedprocessinginwirelesssensornetworks,withafocusontheinterfaceofcomputerscienceandecology.hehasaPhDincomputersciencefromtheQueenslanduniversityofTechnology.contacthimattim.wark@csiro.au.
Dave Swain isaprincipalresearchscientistinthecSIrOLivestockIndustriesresearchgroupbasedattheJmrendelLaboratory.hisresearchinterestsin-cludeafocusongrazingsystemswithaparticularinterestindevelopingmod-elingandexperimentalmethods.hisPhDlookedatlong-termenvironmentalchangeonmt.Kenya,[email protected].
Chris Crossman isanembeddedsoftwareengineerattheautonomousSys-temsLaboratoryinthecSIrOIcTcenter.hehasaBEngincomputersystemsengineeringfromtheuniversityofQueensland,australia.heresearchinter-estsincludeautonomousvirtualfencingforlivestockandoutdoorwirelesssen-sornetworks.contacthimatchristopher.crossman@csiro.au.
Philip Valencia isaresearchengineerintheautonomousSystemsLabora-toryinthecSIrOIcTcenter.hereceivedhisBEng/BITfromtheQueenslanduniversityofTechnology.hisresearchinterestsfocusonenvironmentalsensornetworks,andhe’sundertakingaPhDincomplexsystemsscienceattheuni-versityofQueensland.contacthimatphilip.valencia@csiro.au.
Greg Bishop-Hurley isaresearchscientistintheLivestockSystemsgroupbasedattheJmrendelLaboratoryandiscurrentlyworkingonunderstandingthebehaviorofbeefcattleinextensivegrazingsystemsusingwirelesssensors.contacthimatgreg.bishop-hurley@csiro.au.
Rebecca Handcock isaresearchscientistwiththeSpatialEnvironmentalSys-temsgroupatcSIrOLivestockIndustriesFloreat.herresearchinterestsandPhDfromtheuniversityofTorontofocusonspatialandscaling-issuesrelatedtoearthobservation.contactheratrebecca.handcock@csiro.au.




























