Embed Size (px)
Citation preview

Senior MESA Day

Overview of the Human Arm Anatomy◦ Bones, Joints, Muscles
Review Arm Motion◦ Kinematics: types of motion, location of motion, direction
of motion, magnitude of motion, and degrees of freedom◦ Kinetics: extrinsic forces, intrinsic forces, force vectors,
force of gravity, reaction forces, additional linear forces, and classes of levers
Overview of the Prosthetic Arm Building the Model Building the Display

Humerus◦ The longest and largest bone in the upper
extremity. Ulna
◦ A long bone in the forearm parallel with the radius; at the proximal is the elbow and the distal end is the wrist.
Radius◦ The other bone of the forearm, shorter than the
ulna.


Carpals◦ The wrist is composed of 8 separate
carpal bones. Metacarpals
◦ The intermediate part of the hand skeleton that is between the carpals and the phalanges (up to the knuckles); 5 metacarpal cylindrical bones
Phalanges◦ The fingers of the hand contain 14 digital
bones.

Elbow Joint/Complex◦ Humeroulnar Joint – simple hinge-joint◦ Humeroradial Joint – arthrodial joint allowing
gliding and sliding motions◦ Proximal Radioulnar Joint – pivot joint
Wrist Joint◦ Radiocarpal joint◦ Carpometacarpal joints◦ Intercarpal joints
intercarpal joints
carpometacarpal joint
midcarpal joint
radiocarpal joint

interphalangeal
joints
Metacarpophalangeal Joints Interphalangeal Joints

Flexion: decreasing joint angle such as bending
Extension: increased joint angle such as stretching
Abduction: movement that draws limb away from sagittal plane
Adduction: movement which brings limb closer to the sagittal plane
Supination: palm faces up
Pronation: palm faces down
Circumduction: combination of flexion, extension, abduction and adduction

Upper Arm◦ Biceps brachii, brachialis, coracobrachialis
Forearm◦ Flexor-pronator and extensor-supinator
Hand◦ Thenar, hypothenar, interosseous, lumbrical

Arm Muscles and Their Functions
Muscle Location FunctionBiceps brachii Anterior Arm (humerus) Flexion and supination of the elbow
Brachialis Anterior Arm (humerus) Flexion of elbow in all positions, but especially when the forearm is pronated
Triceps brachii Posterior Arm (humerus) Extension of the elbow
Brachioradialis Posterior/Anterior Forearm (superficial)
Flexion of elbow; also pronation and supination, depending on position of forearm
Pronator teres Anterior Forearm (superficial) Pronation of forearm; flexion of the elbow
Pronator quadratus Anterior Forearm (deep layer) Pronation of the forearm
Flexor carpi radialis Anterior Forearm (superficial) Flexion and abduction of the wrist
Palmaris longus Anterior Forearm (superficial) Flexion and abduction of the wrist
Flexor carpi ulnaris Anterior Forearm (superficial) Flexion and abduction of the wrist
Flexor digitorum superficialis Anterior Forearm (superficial) Flexion of the fingers
Flexor digitorum profundus Anterior Forearm (deep layer) Flexion of the fingers
Flexor pollicis longus Anterior Forearm (deep layer) Flexion of the thumb
Supinator Posterior Forearm (deep layer) Supination of forearm and wrist
Extensor carpi radialis longus Posterior Forearm (superficial) Extension and abduction of the wrist
Extensor carpi radialis brevis Posterior Forearm (superficial) Extension and abduction of the wrist
Extensor carpi ulnaris Posterior Forearm (superficial) Extension and adduction of the wrist
Extensor digitorum Posterior Forearm (superficial) Extension of the fingers
Extensor digiti minimi Posterior Forearm (superficial) Extension of the fingers
Extensor pollicis brevis Posterior Forearm (deep layer) Extension of the thumb
Extensor pollicis longus Posterior Forearm (deep layer) Extension of the thumb
Abductor pollicis longus Posterior Forearm (deep layer) Extension and abduction of the thumb
Anterior of forearm

Tough bands of fibrous connective tissue that connects muscles to bones.◦ Capable of withstanding tension◦ Function to transmit force◦ Function as springs



Purpose: To understand and demonstrate the bones, tendons and muscles of the handMaterials per group:
10 straws
10 beads
10 popsicle sticks
stringShared Tools:
Glue gun
Saw
Scissors
Tape
Bamboo skewers
Lesson plan courtesy of:Curt GabrielsonWatsonville Community Science Workshop

Cut a full length popsicle stick into 1/3 pieces Cut 3 pieces of straw slightly shorter than sticks Glue pieces of straw to stick pieces Glue all three segments onto a full straw; leave a
small space in between each segment, so that flexing is possible
Glue 3 segments with full straw end to a full length stick
Glue one more straw segment onto the top of the full length stick in line with other 3 segments
Tie a bead to the end of piece of string and thread other end through all 4 short straw segments
Tie bead to other end. Wrap each segment with tape.

Cut a paint paddle in half, then one half into two pieces, one about an inch shorter than the other
Glue the larger piece to the top of the full half to form a “T”. Glue smaller piece right underneath it.
Make three more fingers and a thumb Glue the fingers to the paint paddle frame Glue on the thumb more towards the side of the
side of the hand Each finger should move when pulling on its
string

Types of Motion◦ Translatory: all parts move toward same direction◦ Rotatory/Angular: around a fixed axis◦ General: combination of translation and rotation
Location of Motion◦ Transverse or Horizontal Plane
Superior and Inferior◦ Coronal or Frontal Plane
Anterior and Posterior◦ Sagittal plane
Medial and Lateral

y - vertical axis
z –sagittal axis
x - coronal axis
Axis of rotation Direction of motion
Perpendicular to
Sagittal axis(anterior posterior axis)
Horizontally from front to back
Coronal plane
Coronal axis(frontal axis)
Horizontally from side to side
Sagittal plane
Vertical axis Perpendicular to ground
Transverse plane
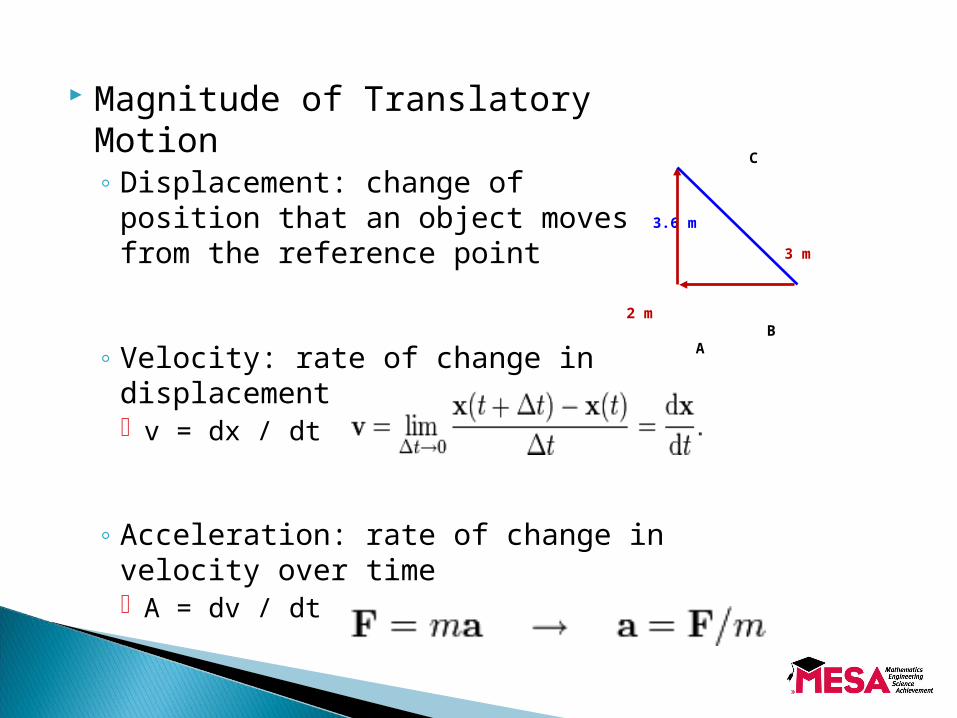
Magnitude of Translatory Motion◦ Displacement: change of position
that an object moves from the reference point
◦ Velocity: rate of change in displacement v = dx / dt
◦ Acceleration: rate of change in velocity over time A = dv / dt
C
3.6 m
3 m
2 m B A

Magnitude of Rotatory Motion◦ Angular displacement: rotation of an object about
an axis in radians
Δθ = Δθ2 − Δθ1
◦ Angular velocity: time rate at which an object rotates about an axis, or at which angular displacement between two bodies changes
◦ Angular acceleration: change of angular velocity over time

Degrees of Freedom◦ 3 translatory motions along the x, y, and z axes
and 3 rotatory motions around the x, y, and z axes
◦ 6 DOF of a rigid body Moving up and down Moving left and right Moving forward and backward Tilting forward and backward (pitch) Turning left and right (yaw) Tilting side to side (roll)

Purpose: to understand degrees of freedom in biomechanics
Materials:
Standard coffee mug
Water
Bucket

Fill standard coffee mug with water ¾ full Place empty bucket on table. Using your hand,
grab and lift the cup and pour the water into the bucket◦ How many different positions can you pour the water
without spilling? Restricting a DOF at the shoulder joint, grab and
lift the cup and pour the water Restricting a DOF at the elbow joint, grab and lift
the cup and pour the water Restricting a DOF at the wrist joint, grab and lift
the cup and pour the water Record observations on Activity Sheet (page 41 of
curriculum)

Purpose: to build a paper robot arm and demonstrate the degrees of freedom
Materials:
Card stock paper Push pins
Foam board Scissors
String Tape
Fasteners Glue
Paper clips protractors
Activity developed by Pre College Programs,
USC Viterbi School of Engineering

Carefully cut out humerus, radius/ulna, and carpal Bend along lines to form arm segments Using push pin, poke holes where indicated Line up holes of humerus with holes of radius/ulna
and insert fastener through both sides Line up holes of radius/ulna with holes of carpal
and insert fastener through both sides Cut one strip of foam board 4" x 2", one strip 3" x
2", and two small pieces 1" x 2" Create standing post Tape free side of humerus to top of standing post Tape a string to the proximal end of radius/ulna Insert paper clip through top of standing post and
bring free end of humerus string through clip

Questions for Analysis◦ How many degrees of freedom does your paper
robot arm possess?
◦ Using a protractor, determine the actual degrees of movement.
◦ Determine the angular displacement

Part II:◦ Using what you learned in Part I, design and create
another paper robot are that has three or more degrees of freedom. You can modify the existing paper robot arm or you can create a new paper robot arm
◦ Questions for Analysis: How many DOF does your new paper robot arm have? Describe the DOF. Using a protractor, determine the actual degrees of
each movement. Determine the angular displacement for each DOF. What was different in design of your new paper robot
arm that allowed for additional DOF?

Extrinsic Forces◦ Gravitation force◦ Fluid force◦ Contact forces
Intrinsic Forces◦ Include muscles, ligaments, and bones◦ Friction between articular surfaces◦ Tension of antagonistic muscles, ligament,
fasciae, and capsules◦ Atmospheric pressure within the join capsule

Concepts to Consider:◦ Force Vectors
Point of application, action line and direction and magnitude
◦ Force of Gravity Gives an object weight, the magnitude of force that
must be applied to an object in order to support it in a gravitational force Weight = mass x 9.8 m/s2 or 32.2 ft/s2
Center of mass: the point where all of the mass of an object is concentrated

◦ Equilibrium Law of Inertia: every object persists in its state of
rest or uniform motion in a straight line unless it is compelled to change that state by forces impressed on it
∑ F = 0 Law of Acceleration: acceleration is produced when a
force acts on a mass; directly proportional to force and inversely proportional to mass
a = F/ m◦ Reaction Forces
Law of Reaction: for every action, there is an equal and opposite reaction

◦ Additional Linear Forces Tension: pulling force exerted when an object is
being stretched or elongated Compression: force applied to an object tending to
cause a decrease in volume Shear: force that moves or attempts to move on
another object Torque: the tendency of a force to rotate an object
about an axis
or τ = (F) (moment arm)
Moment Arm = ⊥dIn A, what is the moment arm?In B, what is the moment arm?

◦ Classes of Levers First-class levers: effort force and resistance force
located on opposite sides of axis of rotation
Second-class levers: effort force located at the end of bar and fulcrum located at other end, with the resistance force at a point between these two forces
Third-class levers: effort force is applied between the resistance force on one end the fulcrum on the opposite end
Law of the Lever: Effort Arm x Effort Force =Resistance Arm x Resistance Force
EA = distance effort force lies from axis of rotationRA = distance resistance force lies from axis of rotation

◦ Mechanical Advantage (MA) Factor by which a mechanism multiplies the force or
torque put into it; Ratio of effort arm (EA) to the resistance arm (RA) A second-class lever will always have a MA > 1
because EA > RA A third-class lever will always have a MA < 1
because EA < RA common in the body and the MA is poor; however, the
speed of rotation created is high because the origin of the resistance force is located farther from the axis rotation than the origin of the effort force, it must travel a greater distance in the same time
A first-class lever can have a MA <, =, or > than 1, depending on the locations of the effort force and resistance force versus the axis of rotation

Purpose: To create a wooden robot arm with three degrees of freedom that uses hydraulics for motionMaterials and Tools:
Plywood Electrical tape
1” bolts with hex nuts Sandpaper
Syringes Scissors
Plastic tubing Hot glue gun
Film canister tops Drill with drill bits
Scotch or masking tape
Saw
Safety Procedure:Use extreme caution with using sharp tools, drills, and hot glue gun
Activity developed by Pre College Programs,
USC Viterbi School of Engineering

Cut two 6”x3” plywood long rectangles, a 4”x2½ “ plywood medium rectangle, and a 2½”x 2½” plywood square
Round off corners of each piece w/sandpaper Humerus: in the middle of one of the long
rectangles, drill three holes Radius/ulna: in the middle of the other long
rectangle, drill two holes Carpal: in the middle of the medium rectangle,
drill one hole and one large hole in the center Line up single hole of humerus with hole of
radius/ulna and insert bolt and nut Line up remaining hole of radius/ulna with small
hole of carpal and insert bolt and nut

Platform
Standing Post
Cut a strip of plywood 10”x3” and two small pieces of plywood 1”x3”
On the large strip, drill two holes Create the standing post by gluing the two small
pieces on both bottom sides of the large plywood Line up holes of standing post with holes of
humerus and insert bolts and nuts Using the center of mass, determine the
dimensions of the platform in order to balance the standing post and the arm structures with nuts and bolts
Cut plywood to determined dimensions above Glue standing post vertically to platform

Three DOF◦ Determine the best manner in attaching the
syringes, plastic tubing, and film canister tops in order to create 3 DOF, taking into consideration the center of mass, torque and classes of levers. You may use additional materials if needed.
Questions for Analysis◦ Calculate the work done by lifting a 147.87 ml (5
oz) dixie cup filled with 100 ml of water to a height of 10 cm. Hint:
◦ Calculate the torque using the above parameters. Hint: use
◦ What class of lever is the wooden hydraulic robot arm? What are the advantages/disadvantages?

Artificial limb is a type of prosthesis, an artificial substitute, that replaces a missing extremity such as an arm
Needed for a various reasons, including disease, accidents, and congenital defects
History◦ Roman Capua Leg, found in a tomb in Capua, Italy
dating to 300 BC, was made of cooper and wood◦ Armorers in the 15th and 16th centuries made
artificial limbs out of iron for soldiers who lost limbs

Types◦ Transradial prosthesis: artificial limb that replaces
an arm missing below the elbow◦ Transhumeral prosthesis: one that replaces an
arm above the elbow Current Technology
◦ New plastics and other materials, such as carbon fiber, have allowed artificial limbs to be stronger and lighter
◦ Additional materials allow for a more realistic look◦ Myoelectric limbs allow more direct control
Emerging Technology◦ Robotic limbs

Purpose: to learn design concepts, teamwork, problem solving techniques and about simple machines
Goal: must be 18 inches in length and be able to pick up an empty Styrofoam cup
Resources/Materials for each group
5 strips of cardboard 15 paper clips
8 binder clips 4 pencils
10 Brads 15 rubber bands
6 clothespins Clear and masking tape
15 craft sticks 4 feet twine
4 feet fishing line Scraps of cardboard
2 hangers
Developed by IEEE as part of TryEngineering

Model MUST perform 3 tasks: grab, lift, and pour 50ml graduated cylinder with 50ml of sand
Model MUST be operated by push of button(s), pull of string(s), push or pull of syringe(s), etc. May NOT perform actual function of grabbing, lifting, or pouring
Entire base of model MUST fit within a 1.5 foot square. Any part of model that may be in contact with the table MUST be within the 1.5 foot square.
Use materials found around the house or school, taking into consideration cost and weight efficiency (max points awarded for low cost and low weight)

Dimensions: 3 ft x 3 ft x 2 ft deep Freestanding Synopsis of project, 200 to 250 words
◦ Include purpose of project, explanation of model, and scientific and engineering ideas involved
Scaled plan rendering◦ Three separate 8 ½ x 11 scaled drawings (front, side, and
top views) with dimensions Materials Table
◦ Table of all materials used in the model including retail price, price per unit, quantity used, total cost, and how each material was acquired (see rules for sample)





























