Embed Size (px)
Citation preview

1
3. CONVOLUŢIA
Introducem operatia de convoluţie in timp
discret (suma de convolutie) si in timp
continuu (produsul de convolutie).
Calculul răspunsului sistemelor liniare şi
invariante in timp, la un semnal de intrare
oarecare.
http://shannon.etc.upt.ro/teaching/ssist/Cap3.pdf
Suma de convoluţie
0x n n x n
x n n k x k n k
Sinteza semnalului de intrare
Produsul intre un impuls Dirac intarziat cu k si semnalul x[n] extrage valoarea
esantionului x[k]:
Semnalul x[n] este o suma de esantioane plasate la toate valorile k posibile:
k
x n x k n k

2
3
• Consideram un sistem liniar Sd, intrare x[n], iesire y[n]
• Raspunsul sistemului la impulsul unitar, δ[n], sau
raspunsul la impulsul unitar (functie pondere), h[n]:
Sd δ[n] h[n]
Sistem liniar
Sd δ[n-k] h[n-k]
SLIT
Sd x[n] y[n]
Sistem liniar
• In plus daca sistemul este si invariant in timp, raspunsul la
impulsul unitar intarziat:
Răspunsul sistemelor discrete liniare şi invariante
în timp (SLITD) la un semnal de intrare oarecare
d dk
dk
k
y n S x n S x k n k
x k S n k
x k h n k
h[n] x[n] y[n]
Sistem SLIT
(LTI system)
k
y n x k h n k x n h n h n x n
Suma de convolutie sau convolutia in timp discret:

3
5
Doua semnale cu durata finita
N1 si N2
Convolutia are durata
N1+ N2-1.
knykxnyxk
Exemplul 1) Convolutia are durata
finita
Suportul (durata) semnalului: un semnal are
N valori semnificative (posibil si unele nule),
dar dupa care valorile sunt identic nule
6
2
2
2
12
1
1
1
Nnn Nk
k n N
an N x h n a a
a
nx n a n
2h n n n N
1
21
0 1 1
nk
k
an N x h n a
a
Exemplul 2) Convolutia are
durata infinita

4
7
Semnale digitale cauzale
Daca semnalul de intrare, respectiv sistemul, sunt cauzale, semnalul de iesire
este si el cauzal:
0
0 and 0 , 0 n
k
x n h n n y n x k h n k
0
0 , 0 ,
n
k k
h n n h n h n n n Z
y n x n k h k x k h n k
Daca sistemul este cauzal:
8
BIBO Stabilitatea
• Sistem stabil: Dacă semnalul de intrare
este mărginit atunci şi răspunsul trebuie să
fie mărginit, “bounded input bounded
output” (BIBO)
• Conditia de BIBO stabilitate
Un sistem digital SLITD este stabil daca si
numai daca raspunsul sau la impuls este
absolut sumabil:
1
k
h k ,h n l

5
Stabilitatea acumulatorului
0
0
- cauzal, , acumulator
1
Acumulatorul este instabil.
n
k
n
k
n
k
h n n y n x k
x n y n x k
x n n y n n n
• Semnalul de iesire nu este marginit
• Folosit in practica: Se limiteaza intervalul de insumare n , sau, din cand in cand se pune semnalul de iesire pe zero.
10
Elementul neutru
• Impulsul Dirac [n] este element neutru
pentru convolutie.
x[n]* [n] = x[n], pentru orice semnal x[n]
h[n]
δ[n] h[n]
h[n] – raspunsul la impuls al sistemului.
Proprietati.

6
11
Sistemul identitate
• Are raspunsul la impuls δ[n] (elementul
neutru pt. convolutie)
• Pentru intrare δ[n] iesirea este tot δ[n].
12
Raspunsul la impuls h[n]=[n-n0].
Raspunsul sistemului este o varianta
intarziata a semnalului de intrare
0 0x n n n x n n
Sistem de intarziere

7
Asociativitatea convoluţiei.
Conectarea în cascadă (serie) a SLIT
21
2121
hhh
hhxhhxy
e
Convolutia este asociativa nhnhnxnhnhx 2121
Raspunsul la impuls al sistemului echivalent este
1 2h n h n h n
1 2y n x n h h n
Prin conectarea în cascadă a 2 SLIT stabile se obţine
tot un SLIT stabil.
121
12
11 lnhhlnh,lnh
Suma de convoluţie este comutativă.
nhnhnhnhnhe 1221
La conectarea în cascadă nu contează ordinea.
nx nh1
nx1
nh2
ny
nx nh2
nx2
nh1 ny

8
Sistemul invers
Sistemul cu raspunsul la impuls este inversul sistemului
cu raspunsul la impuls daca prin conectarea lor in
cascada se obtine un sistem identitate.
i
i
h n
h n
h n h n n
Un exemplu de sistem invers. Pentru sistemul de intarziere :
Sistemul invers
Deplasarea in timp in sensul invers pe axa timpului. Nu este un
sistem cauzal
0nnnh
0ih n n n
16
Distributivitatea convoluţiei faţă de
adunare. Conectarea în paralel a SLITD
• Convolutia este distributiva fata de adunare
1 2 1 2x h n x h n x h h n

9
17
Demonstratie
nhhx
knhknhkx
knhkxknhkx
nhxnhxnynyny
k
kk
21
21
21
2121
Functia indiciala a unui SLITD, s[n]:
Răspunsul la treapta unitara
0
,
1
Daca sistemul este cauzal,
0, pentru 0
n
k
n
k
x n n y n s n h n n h k
h n s n s n
h n n s n h k
Functia indiciala a unui acumulator este un
semnal rampa
x n n s n n n

10
SLITD cu răspuns finit la impuls (FIR) şi
cu răspuns infinit la impuls (IIR)
•Raspuns la impuls cu durata finita (FIR) sau cu durata infinita (IIR).
0
, 0
0 , in rest
nbn M
ah n
FIR IIR
20
FIR
• Ecuatia cu diferente finite
• Un sistem FIR are proprietatea :
0 0
N M
k k
k k
a y n k b x n k
0 1 20 and ... 0Na a a a

11
21
Semnalul de iesire
• Folosind ecuatia cu diferente finite:
• Folosind definitia convolutiei:
k
knxkhny
M
k
k knxa
bny
0 0
22
FIR
• Prin identificare se obtine:
• Se observa ca raspunsul la impuls are durata
finita, M+1, de aici si numele “sistem cu
raspuns finit la impuls”
restin 0
...., 1, 00
,
M,k,a
b
khk

12
Sisteme IIR (Infinite Impulse Response)
2
3
0.5 1
1 0;
0 0.5 1 0 1 0 1 0 0
1 0.5 0 1 0 1 0.5 1 1
2 0.5 1 2 0 2 0.5 2 2
3 0.5 2 3 0 3 0.5 3 3
0.5n
y n y n x n
y
y y x y y h
y y x y y h
y y x y y h
y y x y y h
h n n
nhnynnx
0 si 0 ; 100 0
aaknxbknyaN
k
M
kkk
condiţie iniţială nulă
•SLITD sunt descrise matematic prin ecuatii cu diferente
finite cu coeficienti constanti.
•Sunt implementate folosind subsistemele: celule de
memorare (intarziere), multiplicatoare cu o constanta,
sumatoare.
Implementarea SLITD caracterizate prin
ecuaţii cu diferenţe finite, liniare şi cu
coeficienţi constanţi

13
25
Sisteme de ordinul unu, Implementarea directă I
11 1010 nxbnxbnyanya
z n
•O celula de memorare: intrare x[n], iesire x[n-1]
•Doua multiplicatoare cu o constanta, b0 si b1 : b0x[n] si b1x[n-1]
•Un sumator
Implementarea sistemului nerecursiv, de
mediere alunecatoare (Moving average) MA.
Iesire: z[n]
Implementarea sistemului recursiv, autoregresiv
(Autoregressive) AR. Iesire: y[n]
26
11 1010 nxbnxbnyanya

14
27
; 0 0
N
k
M
kkk knxbknyaSistem de ordinul N
M
k
k knxbnz0
Celule de
memorare,
multiplicatoare,
sumatoare
10
1 N
k
k
y n z n a y n ka
28
• Consideram un sistem FIR :
• Sub-sistemul 2 = multiplicator cu 1/a0
• Substituim cele M sumatoare din subsistemul 1 cu un
singur sumator cu M intrari
• Am presupus ca a0=1
nza
ny0
1
Forma transversala pentru FIR

15
29
Implementarea directă II
•Ordinea sistemelor nu este importanta (conexiune in serie)
•Daca se schimba ordinea: se obtine o forma echivalenta
implementarii directe I, si anume implementarea directa II.
Se inlatura sistemele de intarziere
redundante
30
Sistem de ordin N, Implementarea
directă II
M>N
aN+1, aN+2, …, aM
= 0
M<N
bM+1, bN+2,
…, bN = 0

16
31
Produsul de convoluţie. Răspunsul SLITC
la un semnal de intrare oarecare
• SLIT descris matematic de operatorul S. Trebuie sa gasim iesirea
y(t) atunci cand se cunoaste intrarea x(t).
• Reamintire: Proprietatea de filtrare a impulsului Dirac δ(t)
• Daca vom considera functia test x(τ), iar ca impuls, varianta
deplasata in timp cu t (aici variabila timp este τ), atunci avem:
S
x(t) y(t)
SLIT (LTI system)
0d
x t d x t
32
S
y(t)
SLIT
x t x t d
•Semnalul de iesire
Produsul de convolutie a semnalelor x si h.
Se poate calcula raspunsul unui sistem cunoscut, cu raspunsul la impuls ( h ) la un
semnal de intrare oarecare ( x )
const.const.
( )y t S x t S x t d x S t d
y t x t h t x h t d

17
33
Proprietati • Elementul neutru: distributia Dirac, δ(t).
• Convolutia este comutativa aproape peste tot (a.p.t.). Cu
notatia t – u = τ, avem:
• Convolutia este distributiva in raport cu adunarea
• Convolutia este asociativa
, x t t x t x t
f g t g u f t u du g f t
f t g t h t f t g t h t
1 2 1 2x h t x h t x h h t
34
Cateva remarci
• Daca x(t), h(t) L1 , clasa functiilor absolut integrabile
(sistemul este stabil), atunci
y(t)=x(t)*h(t) L1
• Daca x(t), h(t) L2 , clasa functiilor cu patratul
modulului integrabil (energie finita), atunci convolutia
x(t)*h(t) exista, este marginita si continua
• Daca unul din factori este din L1, iar celalalt din L2, de ex. semnalul de intrare este de energie finita, x(t) L2 si
sistemul este stabil h(t) L1, atunci iesirea este de
energie finita
y(t)=x(t)*h(t) L2

18
35
1
2
f t t t T
g t t t T
Durata convolutiei = T1+T2 (suma
duratelor celor doua semnale)
Exemplul 1) semnale de durata
finita
2
2 2 1
1 2 1 1 2
1 2
0, 0
, 0
,
,
0,
t
t t T
f g t T T t T
T T t T t T T
t T T
36
• Se noteaza g(-τ) = z(τ)
• Se deplaseaza in timp z(τ) cu t catre dreapta:
2
2
1
2
0
2 1 2
1 1 2 1 2
1 2
0, 0;
0 , ;
, ;
, ;
, 0, 0.
t
t
t T
T
t T
t f g t
t T f g t d t
T t T f g t d T
T t T T f g t d T T t
t T T f f t f g t

19
37
Exemplul 2)
;2 2
;
1 ;
T Tf t t t
g t f t
tf g t T t T t T
T
38
Exemplul 3)
• f(0); f(t) si | f(t)| sunt pare.
• functia f apartine lui L1
• f * f este convergenta a.p.t; dar nu si in t=0
02
0
2 2arctg 21 2
duf t dt u
u
1 1
, ?1
f t f t f ttt
2
1 10
1f f f f d d

20
39
2
2
2
; 2 2
, 0 1;
durata infinita
11
1 2ln
1 .2
t
Tt
Tt
T Tf t t t
g t a t a
f g L
Tf g t a t
a
Ta t
Exemplul 4)
40
• –T/2 <t <T/2 suprapunere partiala:
2
2
11
1ln
t Tt
t
T
f g t a d a
a
•t ≥ T/2 suprapunere completa:
2
2 2
2
1.
1ln
T
T Tt t
t
T
f g t a d a a
a
• t < -T/2 , f*g(t) = 0.

21
Condiţia ca un SLITC să fie cauzal
ttyty
;dhtxdthxtxthty
ttxtx
dhtxdthxtxthty
,tththt,th
tt
t
00
0
:obtine se
cauzal, este intrare de semnalul si Daca
0 0Exemplu de sistem cauzal
Exemplu de sistem necauzal
42
Un sistem continuu SLIT, este stabil daca si
numai daca raspunsul sau la impuls este absolut
integrabil
Conditia de BIBO stabilitate a SLITC
• Stabilitate “bounded input bounded output”
1h d ,h t L

22
x t t y t h t t
Integratorul Not
bounded
Răspunsul la impuls, h(t), al unui integrator este σ(t).
.ttt,
t,tdtt
00
0
Răspunsul la un semnal marginit, de exemplu, σ(t), este semnalul rampa, care
este nemarginit.
Integratorul este un sistem instabil. Se foloseste in practica fiindca semnalele de
intrare sunt de durata finita (caz in care semnalul de iesire va fi marginit).
44
Răspunsul indicial al unui SLITC
• Raspunsul indicial=raspunsul la treapta unitara.
• Derivata sa de ordinul unu este raspunsul la
impuls.
• Sistem cauzal:
t
s t h t t h d
's t h t
0
t
s t h t t h d

23
45
• Raspunsul sistemului h la semnalul rampa
• Derivata de ordinul doi a lui y(t) este h(t).
;x t t t y t S t t h t t
" " .y t h t t h h
S
LTI system
x t t t y t h t t t
y t h t
46
• Raspunsul la impuls h(t) este:
– derivata de ordinul intai a raspunsului
indicial s(t)
– derivata de ordinul doi a raspunsului la
semnalul rampa
24
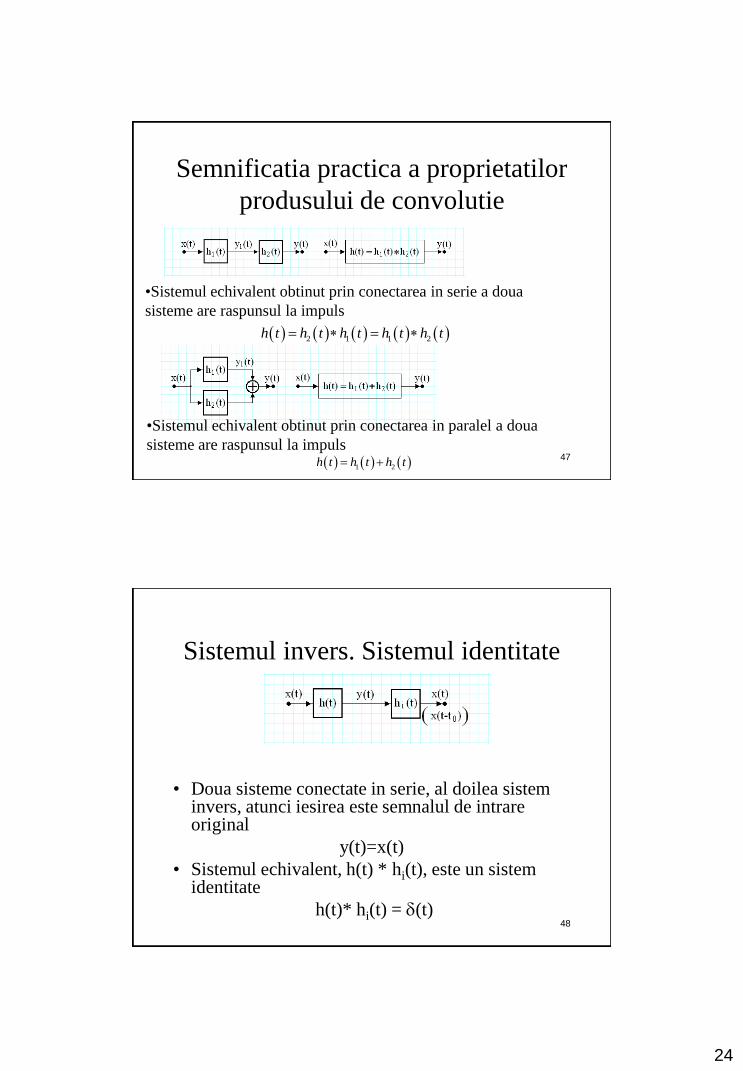
47
Semnificatia practica a proprietatilor
produsului de convolutie
•Sistemul echivalent obtinut prin conectarea in serie a doua
sisteme are raspunsul la impuls
2 1 1 2h t h t h t h t h t
1 2h t h t h t
•Sistemul echivalent obtinut prin conectarea in paralel a doua
sisteme are raspunsul la impuls
48
Sistemul invers. Sistemul identitate
• Doua sisteme conectate in serie, al doilea sistem invers, atunci iesirea este semnalul de intrare original
y(t)=x(t)
• Sistemul echivalent, h(t) * hi(t), este un sistem identitate
h(t)* hi(t) = (t)

25
Implementarea SLITC caracterizate de ecuaţii
diferenţiale liniare, cu coeficienţi constanţi
0
00
N
N
kk
k
k
N
kk
k
k adt
txdb
dt
tyda
Exemple de SLITC caracterizate de ecuaţii diferenţiale liniare
cu coeficienţi constanţi: derivator, integrator
( )( )
dt
tdxty =
( )( )tx
dt
tdy=
Forma generală a ecuaţiei diferenţiale :
50
Implementarea in forma directa II cu
circuite de derivare
0 00
N
N
kk
k
k
N
kk
k
k adt
txdb
dt
tyda
•Sistem de ordinul N
•Forma directa II: sistemele de
intarziere (timp discret)
circuite de derivare (timp
continuu).
•Dificil de construit

26
51
Implementarea in forma directa II cu
circuite de integrare
• Sunt preferabile circuitele de integrare.
• Integram de N ori ecuatia diferentiala o
ecuatie integrala. Cu notatiile
• obtinem ecuatia integrala:
NN xxxyyy ..., , ,..., , , 10 ,10
.00
N
kkNk
N
kkNk txbtya
52
2
1 2
0 0
0
1 11
1 1 22
1 1 2 11
0 1
0
,
....
... ...
; ,...
k k
k kN N
k k Nk kk k
t
t
t
k kk k
d y t d x ta b a
dt dt
y t y t
y t y t t y d
y t y t t t y d d
y t y t t y d d d d
x t x t x t x t t

27
53
Exemple i) Sistemul de ordinul intai
( ) ( )
1=0 =1 1=0
0= 0=
=∑ ∑
bRCaa
N
kkdt
txkdN
kkb
kdt
tykdka
,,

28
55
Exemplu, sistem de ordinul doi
0 0
0 1 2 2
,N N
k kn k n kk k
a y t b x t
LCy t RCy t y t x t
2
2
d y t dy tLC RC y t x t
dtdt
0 1 21 ; ; a a RC a LC 10 b
• Prin identificare se obtin coeficientii, si obtinem forma II de implementare
56
Structura transversala pentru sisteme
FIR • Raspunsul la impuls:
.0
N
kk kTthth
.kTthth
,thtxkTthtxty
,hNTtx...hTtxhtxty
N
kk
N
kk
N
0
0
10





























