Embed Size (px)
Citation preview

Seminar WS 03/04„Satellite-Based Internet“:
The CANDOS-Project
Carsten Krüger 27.11.2003
Julius-Maximilians-Universität Würzburg
Lehrstuhl für Informatik VII
Prof. Dr. Klaus Schilling

Content
• CANDOS Overview
• Mission Objectives
• Space Network & Ground Network
• The Low Power Transceiver (LPT)
• Protocols
• Experiments
• Conclusions

1. CANDOS Overview

1. CANDOS Overview
• Flew as a hitchhiker payload on Columbia STS-107
• Launched on January 16, 2003• Completed its mission on January 31, 2003• Part of FREESTAR (Fast Reaction Experiments Enabling Science, Technology Applications, and Research)
• End-to-end data flow architecture based on standard IP protocols
• Used off-the-shelf commercial hardware• Scheduled and operated as if it was a free flying satellite

2. Mission Objectives
• Demonstration of the Low Power Transceiver
(LPT)
• Perform Internet-in-space experiments
• Communication over
Space Network (SN) (TDRSS) and
Ground Network (GN) (Ground stations)
• GPS Navigation
• Space-Based Range Safety
• On-Orbit Reconfiguration

3. Space Network & Ground Network

3. Space Network & Ground Network
• Passes were possible when the LPT was the primary objective in the Shuttle attitude timeline
• Typical links:2 kbps up / 128 kbps downto ground stations32 kbps forward / 128 kbps returnthrough TDRSS
• CANDOS communications links used the standard IP protocol and HDLC data framing
• Each ground station was connected to the NASA Closed IONet

3. Space Network & Ground Network
• Routers: standard Cisco 2621 units
• Each router was configured to be a Mobile IP foreign agent (standard Cisco IOS configuration option)
• Ground Station Router Interface Device (GRID): allowed the RF links to appear as serial port connections between the flight hardware and a ground station router serial port
• GRID provided data scrambling and de-scrambling for all links
3. Space Network & Ground Network
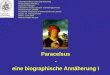
• 97 SN events were supported forapproximately 52 hours of totaltime
• 91 successful events (94%)• 4 partially successful events (4%)• 2 unsuccessful events (2%)
(Linux OS crashed / hung up;conflict between blind commandsand background scripts forconfiguring the RF module)
• 37 GN events were supported for a total of 6 hours• 28 successful GN events (76%)• 8 partially successful GN events (21%)• 1 unsuccessful GN event (3%)
SN & GN Communications Passes
SN Communications
TDRSS SSA 52
TDRSS MA 45
GN Communications
MILA 16
Wallops 21
Total Passes 134

4. The Low Power Transceiver (LPT)
• A multi-band, multi-channel, lowpower, lightweight, low cost,modular, software programmable,navigation and communicationtransceiver prototype.
• Developed by NASA / Goddard SpaceFlight Center (GSFC) andITT Industries
• Uses three S-band antennas and one L-band (GPS) antenna for communications
• Forward link frequency: 2106.4 MHz (S-Band)
• Return link frequency: 2287.5 MHz (S-Band)

4. The Low Power Transceiver (LPT)
• Based on PC-104 form factor
• Allows the flight unit to have an optional 233MHz 686 processor with 256 MB of RAM and 144 MB of flashdisk
• Running Red Hat Linux 6.1 (2.2.12 kernel)
• Processes GPS signals using the civilian C/A codes
• Status information logged to ‘syslog’ and other files for later retrieval
• RS-422 synchronous serial interface between CPU and LPT

4. The Low Power Transceiver (LPT)
LPT
18” S-BandTransmitAntenna
3” L-BandReceiveAntenna
3” S-BandReceiveAntenna
3” S-BandTransmitAntenna

5. Protocols
Problems• Noise:- Internet: Losses due to congestion- Space: Losses due to noise- TCP slows down- UDP: no flow control, no throttle of data
• Delay:- Shuttle in 250 km - Orbit --> RTT: only 1,7 ms!- TDRSS in 36.000 km -Orbit --> RTT: 240 ms- Limit of TCP based applications: 1,5 s RTT

5. Protocols
• All communications between the GSFC and the LPT used HDLC framing and standard IP
• Standard operating systems process IP headers
• LPT looked like any addressable Internet node
• Ground IP packets delivered over NASA Closed IONet
• Data packets addressed directly to multiple ground destinations by onboard processor
• Multiple ground systems address data directly to spacecraft, no need to specify ground station

• First end-to-enddemonstration ofOMNI
• Benefits of theOMNI Concept:- Mobile Satellite/Instrument LAN - Easier Integration - Virtual Control Center - Off-The-Shelf Hard- and Software - Distributed Computing Concepts - Reliable Data Transfer
5. Protocols

5. Protocols
Mobile IP
• Comes with Cisco routers
• Utilized on all two-way SN and GN passes
• Only required three packets to set up tunnel on marginal links
• Performed very well (~50 ms setup + RTT delay)
• Automated route management to the Shuttle
• Autonomously addressed IP packets, as required to route message traffic, regardless of the ground station or TDRSS data relay satellite through which they were communicating

5. Protocols
TCP
• TCP = Transmission Control Protocol
• Is designed as a guaranteed data stream
• Requires two-way link
• ACK for every packet
• Applications:- Secure Shell (SSH) and Telnet: TCP based remote login to the spacecraft- Secure Copy (SCP) and FTP: TCP based reliable file transfer to and from the spacecraft

5. Protocols
UDP
• UDP = User Datagram Protocol• Data stream is NOT guaranteed• Standard protocol, supported by all routers and computers
• No connection setup, each packet is self identifying and routable
• Works over one-way links• Unaffected by link delays and data rates• UDP/IP packets well suited for space use:- receive real-time spacecraft telemetry- spacecraft one-way blind commanding

5. Protocols
MDP I
• MDP = Multicast Dissemination Protocol
• Developed over 5 years ago at Naval Research Lab
• UDP based, reliable file transfer
• OSI-Model: Application layer protocol• Used extensively for file transfer • Supported transfers over one-way andtwo-way links
• Code is freely available: http://pf.itd.nrl.navy.mil/projects/mdp/

5. Protocols
MDP II
• Bandwidth utilization: max. 90%
• Provides the ability to throttle transfers to a specified average bitrate
• Designed to operate with large round-trip-time delays on the order of hours or days
• Noise manifests itself as dropped packets:Solved by retransmissions and application-level Reed-Solomon Forward Error Correction
• NACK back to sender, if the receiver missed packet(s) --> automatic retransmission

5. Protocols

5. Protocols
MDP III
• The amount of added FEC is selectable• High Link Asymmetry:- Because MDP is NACK based, it is extremely conservative of the uplink channel- 1000:1 downlink/uplink ratio (10E-5 BER) Ratios of 10.000:1 and beyond are common
• Unidirectional Link Capability:- NACKs can even be segregated into a different contact- Emissions Control Mode (EMCOM): client never requests retransmission, best-effort attempt to receive the file

5. Protocols

5. Protocols
MDP IV
• Bandwidth utilization and link asymmetry are essentially independent of round trip time
• MDP can handle intermittent links,transfer is completed on subsequent contacts
• Potential enhancements:- accept runtime commands to alter parameters on the fly- Runtime Datarate Throttle Control: Dynamically change its bitrate to adapt to changing spacecraft modes- Pause / Resume: Pausing it when the spacecraft was out of contact, all MDP's timers would be frozen

5. Protocols
NTP
• NTP = Network Time Protocol• On-board clock synchronization to ground time standard using NTP
• provided accurate time stamps for all system logs and telemetry samples
• NTP functioned but needs more work for high precision:- Precision timing not possible: simple PC104 computer clock, no thermal control- No independent onboard time reference to measure against

5. Protocols
HDLC
• HDLC = High Level Data Link Control• Layer 2 of the OSI model • Variable length frames with CRC-16 error check
• ISO standard supported by standard router serial interfaces
• Works over one-way links• Used over space links for over 20 years• For use on point-to-point and multipoint (multidrop) data links

5. Protocols
TDRSS
• IP connection to the South Pole since 1997
• CANDOS experiment demonstrated TDRSS IP support to an orbiting user
• Orbiting user can have line of sight to TDRSS for essentially an entire orbit
• Implemented Demand Access System (DAS) Multiple Access (MA) return link
• Transmit data to any destination at any time without any ground controller interaction
6. Experiments

6. Experiments
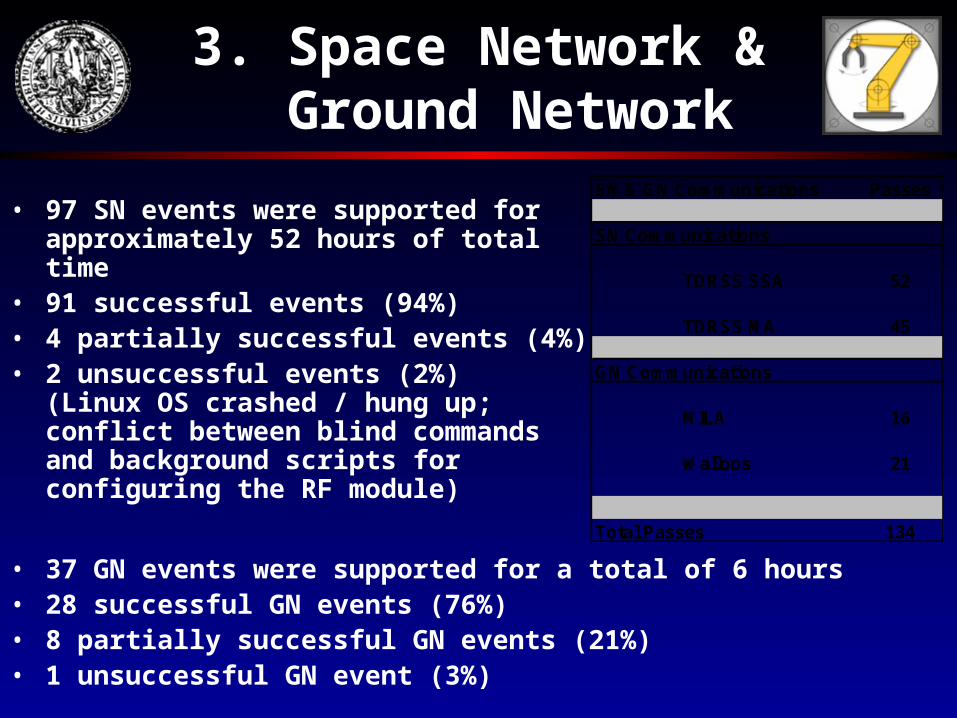
File Transfer
• Upload of software update files using MDP (using one- and two-way communication links), automated hot-directory
• Return of science data files using MDP,FTP and SCP
• File delivery spanning TDRSS and ground station handovers using MDP, FTP and SCP
• FTP used for special cases with limited bandwidth links
• Some files were compressed with GZIP

6. Experiments
Telemetry
• Real-time telemetry (status of LPT) using UDP
status packets over two-way and one-way links
• Telemetry to multiple destinations determined and
controlled by the onboard processor
• During contact with CANDOS status display was
updated every 30 s
• All information timestamped in SYSLOG facility or
application logs (NTP, GPS, MIP, BlindCmd,
RangeSafety, etc.)
• Manually compressed and moved log files to
download directories

6. Experiments

6. Experiments
On-Orbit-Reconfiguration & Commanding
• Multiple, simultaneous control of spacecraft
operations using SSH from multiple consoles
• Telnet used across very slow Hitchhiker 1200 baud
access link
• Automated spacecraft operations using the CRON
scheduling command
• Modified version of the LPT's firmware was
uploaded and commanded to reboot the experiment
• Blind commanding using UDP
• Commanding using Linux shell scripts

6. Experiments
GPS
• GEODE = GPS Enhanced Orbit Determination Experiment
• Four GPS experiment intervals occurred during the
mission, each requiring a minimum of 2 hours of
consecutive time without Shuttle attitude maneuvers
• Filter to estimate position, velocity, drag
coefficient, clock bias, and clock drift
• Force models for Earth's geopotential, drag
accelerations, and Sun/Moon perturbations
• Over 150 MB of navigation data was downlinked using
TDRS and GN communications

7. Conclusions
• Complete success of all flight primary and secondary
objectives
• Approximately 60 hours of payload contact time
• First demonstration of Mobile IP in orbit, as well
as other IP applications
• Standard off-the-shelf products worked well and can
work much better with a little design/configuration
effort and real flight hardware
• A long-term operational mission would need more
automation
• All data downloaded prior to the tragic loss of
STS-107 and crew during landing on February 1, 2003
The End