Embed Size (px)
Citation preview

Phil. Trans. R. Soc. A (2010) 368, 4755–4774doi:10.1098/rsta.2010.0179
Self-organization at the frictional interfacefor green tribologyBY MICHAEL NOSONOVSKY*
College of Engineering and Applied Science, University of Wisconsin,Milwaukee, WI 53201, USA
Despite the fact that self-organization during friction has received relatively littleattention from tribologists so far, it has the potential for the creation of self-healingand self-lubricating materials, which are important for green or environment-friendlytribology. The principles of the thermodynamics of irreversible processes and of thenonlinear theory of dynamical systems are used to investigate the formation of spatialand temporal structures during friction. The transition to the self-organized state withlow friction and wear occurs through destabilization of steady-state (stationary) sliding.The criterion for destabilization is formulated and several examples are discussed: theformation of a protective film, microtopography evolution and slip waves. The patternformation may involve self-organized criticality and reaction–diffusion systems. A specialself-healing mechanism may be embedded into the material by coupling the correspondingrequired forces. The analysis provides the structure–property relationship, which can beapplied for the design optimization of composite self-lubricating and self-healing materialsfor various ecologically friendly applications and green tribology.
Keywords: friction; self-lubrication; self-organization
1. Introduction
The emergence of green tribology makes it important to reconsider someconventional approaches to friction and wear. Friction and wear are usuallyviewed as irreversible processes, which lead to energy dissipation (friction) andmaterial deterioration (wear). On the other hand, it is known that under certaincircumstances frictional sliding can result in the formation (self-organization) ofspatial and temporal patterns. Friction-induced self-organization has a significantpotential for the development of self-lubricating, self-healing and self-cleaningmaterials, which can reduce environmental contamination, and thus it is relevantto green tribology.
Historically, the first attempts to investigate friction-induced self-organizationwere made in Russia starting in the 1970s. Several groups can be mentioned.First, Bershadsky (1992, 1993) in Kiev investigated the formation of the so-calledself-organized ‘secondary structures’. According to Bershadsky, friction and wearare two sides of the same phenomenon, and they represent the tendency of
One contribution of 11 to a Theme Issue ‘Green tribology’.
This journal is © 2010 The Royal Society4755
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from
4756 M. Nosonovsky
energy and matter to achieve the most disordered state. However, the synergyof various mechanisms can lead to self-organization of the secondary structures,which are ‘non-stoichiometric and metastable phases’, whereas ‘the friction forceis also a reaction on the informational (entropic) excitations, analogous tothe elastic properties of a polymer, which are related mostly to the changeof entropy and have the magnitude of the order of the elasticity of a gas’(Bershadsky 1993).
These ideas were influenced by the theory of self-organization developedby I. Prigogine, a Belgian physical chemist of Russian origin and the winnerof the 1977 Nobel Prize in Chemistry. Prigogine (1968) used the ideas ofnon-equilibrium thermodynamics to describe the processes of self-organization(Nicolis & Prigogine 1977). Later, he wrote several popular books about thescientific and philosophical importance of self-organization (Prigogine 1980;Prigogine & Stengers 1984). At the same time, at the end of the 1970s, the conceptof ‘synergetics’ was suggested by Haken (1983) as an interdisciplinary scienceinvestigating the formation and self-organization of patterns and structures inopen systems, which are far from thermodynamic equilibrium. The very word‘synergetics’ was apparently coined by the architect and philosopher R. B. Fuller(the same person after whom the C60 molecule was later called ‘fullerene’).The books by Prigogine and Haken were published in the USSR in Russiantranslations and became very popular in the 1980s.
The second group to mention is that of N. Bushe and I. Gershman in Moscow.Their results were summarized in the book edited by Fox-Rabinovich & Totten(2006). In 2002, Bushe won the most prestigious tribology award, the TribologyGold Medal, for his studies of tribological compatibility and other related effects.The third group is that of Garkunov (2004) and co-workers, who claimedthe discovery of the synergetic ‘non-deterioration effect’, also called ‘selectivetransfer’. Garkunov’s mostly experimental research also received internationalrecognition when he was awarded the 2005 Tribology Gold Medal ‘for hisachievements in tribology, especially in the fields of selective transfer’.
In the English language literature, the works by Klamecki (1980) were the firstto use the concepts of non-equilibrium thermodynamics to describe friction andwear. His work was extended by Zmitrowicz (1987), Dai et al. (2000), Doellinget al. (2000) and others. An important entropic study of the thermodynamicsof wear was conducted by Bryant et al. (2008), who introduced a degradationfunction and formulated the degradation–entropy generation theorem in theirapproach intended to study the friction and wear in combination. They notethat friction and wear, which are often treated as unrelated processes, are infact manifestations of the same dissipative physical processes occurring at slidinginterfaces. The possibility of the reduction of friction between two elastic bodiesdue to a pattern of propagating slip waves was investigated by Adams (1998) andNosonovsky & Adams (2001), who used the approach of the theory of elasticity.
A completely different approach to friction-induced self-organization is relatedto the theory of dynamical systems and involves the investigation of friction testresults as time series. Since the 1980s, it has been suggested that a specific type ofself-organization, called ‘self-organized criticality’ (SOC), plays a role in diverse‘avalanche-like’ processes, such as the stick–slip phenomenon during dry friction.The research of Zypman and Ferrante (Zypman et al. 2003; Adler et al. 2004;Buldyrev et al. 2006; Fleurquin et al. 2010) and others deals with this topic.
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

Frictional interface for green tribology 4757
A different approach based on the theory of dynamical systems was suggestedby Kagan (2010), which uses the so-called Turing systems (the diffusion–reactionsystem) to describe the formation of spatial and time patterns induced by friction.Nosonovsky & Bushan (2009, 2010) and Nosonovsky et al. (2009) suggestedtreating self-lubrication and surface healing as manifestations of self-organization.They noted that the orderliness at the interface can increase (and, therefore, theentropy is decreased) at the expense of the entropy either in the bulk of the bodyor at the microscale. They also suggested that self-organized spatial patterns(such as interface slip waves) can be studied by the methods of the theory ofself-organization.
The reduction of friction and wear due to self-organization at the slidingfrictional interface can lead to self-lubrication, i.e. the ability to sustain lowfriction and wear without the external supply of a lubricant. Since lubricantsconstitute environmental hazards, while friction and wear often lead to heatand chemical contamination of the environment, self-lubrication has potential forgreen tribology. Self-lubrication is also common in living nature, and therefore it isof interest to scientists and engineers who are looking for a biomimetic approach,which also has potential for green tribology.
In this paper, I present a model of the formation of self-organized patternsduring friction through destabilization of the steady state, and discuss themethods of investigating such patterns and their relation to self-lubrication andenvironment-friendly tribology.
2. Friction-induced self-organization
In this section, I will discuss phenomenological observations of friction-inducedself-organization, suggest a model for the transition from stationary sliding tothat with self-organized structures and review several examples.
(a) Qualitative studies
Bershadsky (1992) was apparently the first to pay attention to friction-inducedself-organization and to suggest a classification of various self-organization effects.In the search for self-organization during friction, he investigated quite a diverserange of processes and phenomena: autohydrodynamic effects, the evolutionof microtopography, the formation of chemical and convective patterns andthe oscillation of various parameters measured experimentally during friction.Some of these phenomena had well-investigated principles and mechanisms,while others were studied in a phenomenological manner, so it was not possibleto approach them all in a uniform manner. He, therefore, suggested that thestate and evolution of a self-organized tribosystem might be described usingdifferent methods, including the equations of motion, a statistical description,measurement of certain parameters, etc. Depending on the method of description,different features of self-organization (‘synergism’) were observed, but in mostsituations a self-regulated parameter existed and the governing principle or targetfunction could be identified.
Nosonovsky & Bhushan (2009, 2010), Nosonovsky et al. (2009) and Nosonovsky(2010) suggested entropic criteria for friction-induced self-organization on thebasis of the multi-scale structure of the material (when self-organization at the
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

4758 M. Nosonovsky
Table 1. Self-organization effects in tribosystems.
mechanism/drivingeffect force condition to initiate final configuration
stationarymicrotopographydistributionafter running in
feedback due tocoupling of frictionand wear
wear affectsmicrotopographyuntil it reaches thestationary value
minimum frictionand wear at thestationarymicrotopography
in situ tribofilmformation
chemical reaction leadsto film growth
wear decreases withincreasing filmthickness
minimum frictionand wear at thestationary filmthickness
slip waves dynamic instability unstable sliding reduced friction
self-lubrication embeddedself-lubricationmechanism
thermodynamiccriteria
reduced friction andwear
surface healing embedded self-healingmechanism
proper coupling ofdegradation andhealing
reduced wear
macroscale occurs at the expense of deterioration at the microscale) and couplingof the healing and degradation thermodynamic forces. Table 1 summarizes hisinterpretation of various tribological phenomena that can be interpreted as self-organization. In addition, self-organization is often a consequence of the couplingof friction and wear with other processes, which creates a feedback in thetribosystem.
In the consequent subsections, I will discuss quantitative criteria of friction-induced self-organization and concentrate on three examples: the formationof a protective film at the interface (a spatial ‘chemical’ pattern), theadjustment of sliding surfaces during the running-in transient period (steady-statemicrotopography) and friction-induced elastic vibrations (patterns).
(b) Stability criteria for the transition from the steady-state tothe self-organized regime
In non-equilibrium (or irreversible) thermodynamics, a process that does notdepend on time is called stationary, whereas a process that does not depend on thespatial coordinates is called homogeneous. A process that is both homogeneousand stationary is called equilibrium, whereas a process that is either non-stationary or inhomogeneous is called non-equilibrium. When a non-equilibriumprocess, which can be characterized by a parameter q (a so-called generalizedcoordinate), occurs, a generalized thermodynamic force X that drives the processcan be introduced in such a manner that the work of the force is equal todQ = Xdq. The flux (or flow rate) J = q is associated with the generalizedcoordinate, so the entropy production rate per unit time is S = XJ . For slidingfriction of a body that is characterized by its position x , the flow rate is equal tothe sliding velocity J = V , and the thermodynamic force is equal to the frictionforce X = mW /T .
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

Frictional interface for green tribology 4759
Frictional sliding and wear are irreversible processes, since they areinhomogeneous and often non-stationary. The transition from the steady-state(stationary) sliding regime to the regime with self-organized structures occursthrough the destabilization of the steady-state regime. At the steady state, therate of entropy production is at minimum. The stability condition for thethermodynamic system is given in the variational form by
12
d2S =∑
k
dXkdJk ≥ 0, (2.1)
where d2S is the second variation of entropy production rate (Fox-Rabinovichet al. 2007; Nosonovsky & Bhushan 2009) and k is the number of generalizedforces and flows. Equation (2.1) states that the energy dissipation per unit timein the steady state should be at its minimum, or the variations of the flow and theforce should be of the same sign. Otherwise, the steady-state solution becomesunstable and transition to the self-organized solution with patterns can occur.Equation (2.1) is valid for a wide range of interactions, including mechanical,thermal and chemical, but the corresponding terms in the entropy productionrate should be considered.
In the situation when only mechanical interactions are significant, and thechange of temperature T has a negligible effect on friction, the entropyis proportional to the dissipated energy divided by temperature dS = dQ/T(figure 1a). Consider first the situation when the production of entropy dependson the sliding velocity V . The rate of entropy production is given by
S = mWVT
, (2.2)
where W is the normal load and m(V ) is the coefficient of friction. The stabilitycondition is given by
12
d2S = d
(mWT
)d(V ) = W
Tvm
vV(dV )2 ≥ 0. (2.3)
If the slope of the m(V ) curve (the partial derivative m′V ≡ vm/vV ) is negative,
then the steady-state sliding becomes unstable (figure 1b), understandably so,because the decrease of friction with increasing force leads to the increase ofsliding velocity and to a further increase of friction, and thus creates a positivefeedback loop (figure 1c). There are many practical examples of decreasingcoefficient of friction with increasing sliding velocity (so-called ‘negativeviscosity’) due to time-dependent deformation (viscoelastic, elastoplastic, creep)at the interface, which leads to an increasing real area of contact between the twobodies and, therefore, increasing friction (Nosonovsky & Adams 2004).
Suppose that one contacting material has microstructure characterized by acertain parameter j, such as, for example, the size of reinforcement particles in acomposite material. Values of j such that m′
V (j) > 0 correspond to steady-statesliding. However, m′
V (j) = 0 corresponds to destabilization of the steady-statesolution. As a result, a new equilibrium position will be found with a lowervalue of m.
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

4760 M. Nosonovsky
VW
Q
Q ¢
x
dz
z
T
T ¢ = T – dz(FV)/l
unstabled2S
·
(b)
(c)
(a)
minimumfrictionco
effi
cien
t of
fric
tion,
m
V
friction, m (V, y)
sliding velocity, V
sliding velocity,V· µ –mW
stabled2S
·
stabled2S
·
dVdV
dV
y
F
Figure 1. (a) Heat flow away from the frictional interface. Temperature T ′ at distance dz from theinterface depends on the thermal conductivity l. (b) Decreasing coefficient of friction with velocityresults in the instability of sliding, since it forms (c) a positive feedback in the system.
Suppose now that the coefficient of friction depends also on a microstructureparameter f, such as the thickness of the interface film (figure 2a). The differencebetween j and f is that the parameter j is constant (the composition of thematerial does not change during friction), whereas the parameter f can changeduring friction (the film can grow or decrease due to a friction-induced chemicalreaction or wear). The stability condition is now given by
12
d2S = d
(mWT
)d(V ) = W
Tvm
vf
vVvf
(df)2 ≥ 0. (2.4)
If the stability condition is violated for a certain value of f, then further growthof the film will result in decreasing friction and wear, which will facilitate thefurther growth of the film. The destabilization occurs at m′
f(j, f) = 0. Note that
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from
Frictional interface for green tribology 4761
layervalue
film thickness, f
bulkvalues
matrix with reinforcement
protective film
(a)
(b)
f
y
df
df
y2
ycr
y1
coef
fici
ent o
f fr
ictio
n, m
d2S·
d2S·
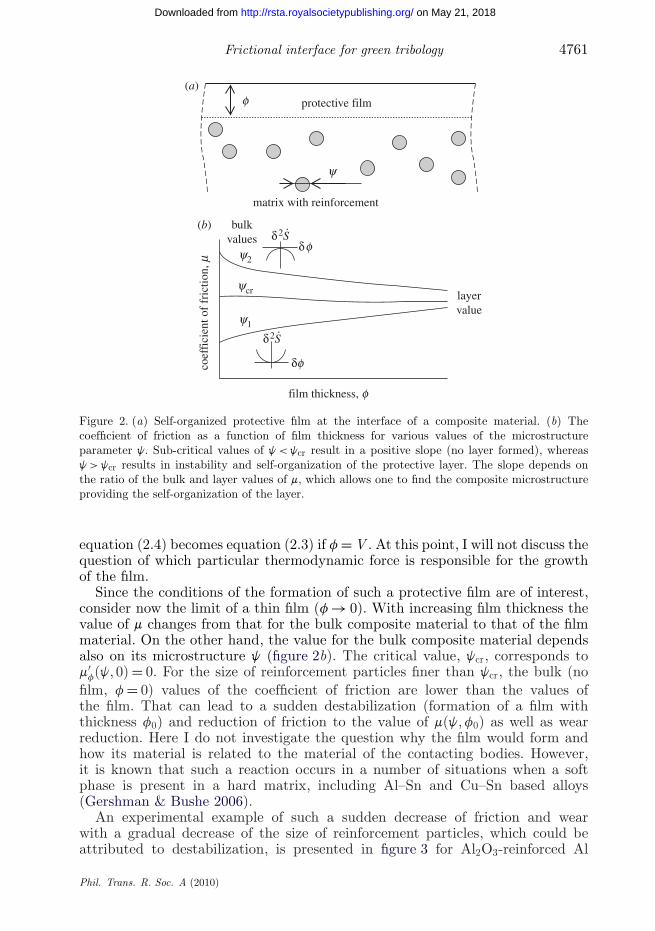
Figure 2. (a) Self-organized protective film at the interface of a composite material. (b) Thecoefficient of friction as a function of film thickness for various values of the microstructureparameter j. Sub-critical values of j < jcr result in a positive slope (no layer formed), whereasj > jcr results in instability and self-organization of the protective layer. The slope depends onthe ratio of the bulk and layer values of m, which allows one to find the composite microstructureproviding the self-organization of the layer.
equation (2.4) becomes equation (2.3) if f = V . At this point, I will not discuss thequestion of which particular thermodynamic force is responsible for the growthof the film.
Since the conditions of the formation of such a protective film are of interest,consider now the limit of a thin film (f → 0). With increasing film thickness thevalue of m changes from that for the bulk composite material to that of the filmmaterial. On the other hand, the value for the bulk composite material dependsalso on its microstructure j (figure 2b). The critical value, jcr, corresponds tom′
f(j, 0) = 0. For the size of reinforcement particles finer than jcr, the bulk (nofilm, f = 0) values of the coefficient of friction are lower than the values ofthe film. That can lead to a sudden destabilization (formation of a film withthickness f0) and reduction of friction to the value of m(j, f0) as well as wearreduction. Here I do not investigate the question why the film would form andhow its material is related to the material of the contacting bodies. However,it is known that such a reaction occurs in a number of situations when a softphase is present in a hard matrix, including Al–Sn and Cu–Sn based alloys(Gershman & Bushe 2006).
An experimental example of such a sudden decrease of friction and wearwith a gradual decrease of the size of reinforcement particles, which could beattributed to destabilization, is presented in figure 3 for Al2O3-reinforced Al
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

4762 M. Nosonovsky
regular regimeregular regime
self-organizedregime
self-organizedregime
df df
df df
ycrycr
d2S·
d2S·
d2S· d2S
·
Al2O3 particle size (nm), 15 vol% Al2O3 particle size (nm), 15 vol%
10 102 103 10410 102 103 104
1
(a) (b)
1.6
1.2
0.8
0.4
0
10–1
10–2
10–3
10–4
wea
r ra
te (
mm
3 N–1
m–1
)
coef
fici
ent o
f fr
ictio
n
10–5
Figure 3. Significant reduction in (a) wear and (b) friction with decreasing particle size in Al–Al2O3nanocomposite can be attributed to surface self-organization (based on Jun et al. 2006).
matrix nanocomposite friction and wear tests (steel ball on disc in ambientair; Jun et al. 2006). The abrupt decrease of friction and wear occurs forreinforcement particles smaller than jcr = 1 mm in size and can be attributedto the changing sign of the derivative m′
f(jcr, 0) = 0, although additional study isrequired to prove this.
The model suggested in this section can easily be generalized for the caseof several parameters jk and fk . In addition, if heat conduction is taken intoaccount, the rate of entropy production per unit interface area is given by(Fox-Rabinovich et al. 2007)
Si = (mWV )2
lT 2, (2.5)
where l is the thermal conductivity. Note that Si in equation (2.5) is entropyper unit surface area and is thus measured in joules per kelvin per square metre,unlike the total entropy in equation (2.2), which is measured in joules per kelvin(Nosonovsky & Bhushan 2009). Now the stability condition is given by
12
d2S = V 2W 2
T 2
vm
vf
(1l
vm
vf− m
l2
vl
vf
)(df)2 ≥ 0 (2.6)
and destabilization occurs at m′f(j, f)=0 and m′
f(j, f)=[m(j, f)/l(j, f)]l′f(j, f).
(c) Running-in
When friction is initiated, there is a certain transient period, referred to as‘running-in’, during which friction and wear rate decrease to their stationaryvalues. Furthermore, when the load or sliding velocity changes, the friction forceusually increases at first, and then decreases to the steady-state value (Blau 1989).This is an experimental observation, and it is not obvious at all a priori why theopposite tendency (increasing friction during the transient period) is almost neverobserved (figure 4).
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

Frictional interface for green tribology 4763
0
0.35
0.45
0.55
0.65
(a) (b)
5
4
3
2
1
0
Ra
(nm
)
fric
tion
coef
fici
ent
10 20
number of cycles number of cycles
30 40 9 19 29 39
Figure 4. The change in (a) the coefficient of friction and (b) the average surface roughness duringrunning-in in Cu substrate with the number of cycles during a ball-on-disc test with a tungstencarbide (WC) ball (adapted from Mortazavi et al. 2010).
During the running-in period, the surfaces roughness of the contacting solidsurfaces changes, until it reaches a certain equilibrium value and thus theadjustment of the surfaces to each other occurs. This process can be viewed asself-organization that leads to minimized energy dissipation and thus minimumfriction and wear. However, the particular mechanism of this process remains tobe explained.
Assume that one of the surfaces in contact is harder than the other, so mostwear occurs on the softer surface. The surface roughness of the softer surface atany moment of time is characterized by a certain distribution of microtopographyparameters. For simplicity, I will assume that the surface roughness is sufficientlycharacterized by only one parameter, R, for example, the average roughness ofthe rough profile of the softer material, and this parameter is identified with ffrom equation (2.4). In §2b, the mechanism that leads to the change of f was notaddressed and it was assumed that there is such a mechanism that leads to theminimum entropy rate for the system. Here a simple phenomenological modelis suggested for the microtopography evolution and the coefficient of friction(Mortazavi et al. 2010):
m = CdefR + Cadh
R(2.7)
and
R = −ACdefR + ACadh
R. (2.8)
The model assumes that there are two mechanisms involved in friction, wear andmicrotopography evolution, i.e. adhesion and deformation. For the deformationmechanism, the coefficient of friction and wear rate grow with increasingroughness, whereas for the adhesion mechanism, friction and wear grow withdecreasing roughness. A linear proportionality for R and 1/R is assumed, withCdef and Cadh being the corresponding proportionality constants. Roughnessincreases due to the adhesional wear and decreases due to the deformational wear,so that there is a minimum, and the corresponding proportionality constant is A.
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

4764 M. Nosonovsky
Using R = f and substituting equation (2.7) into equation (2.4) yields
12
d2S = d
((Cdeff + Cadh/f)W
T
)d(V ) = W
T
(Cdef − Cadh
f2
)vVvf
(df)2 ≥ 0. (2.9)
The stationary point corresponding to minimum friction is given by
f =√
Cadh
Cdef. (2.10)
Owing to the feedback loop present in the system (figure 5a), there are twocompeting processes, and, as a result, roughness tends to decrease to itsequilibrium value given by equation (2.10), which also corresponds to theminimum coefficient of friction (figure 5b).
The natural parameter that characterizes the degree of surface disorder is theShannon (information) entropy of a rough profile,
S = −B∑
j=1
pj log(pj), (2.11)
where pj is the probability of appearance of a height in the bin j , and B is the totalnumber of bins. For a less disordered profile, the value of S is lower (Fleurquinet al. 2010; Nosonovsky 2010). For example, for a smooth surface profile with aconstant height y(x) = y0, the value of the probability of the bin n that includes y0will be unity, pn = 1, whereas pj = 0 otherwise, so the total entropy is S = 0, sinceboth pn log(pn) = 1 log(1) = 0 and the limit of limpj→0[pj log(pj)] = 0. For a profileconsisting of two height levels with equal probabilities p1 = p2 = 0.5, the entropyis S = 2 × 0.5 log(0.5) = 0.693. The entropy rate of a stochastic process can be amore adequate parameter to investigate spatial patterns. The interplay betweenthe surface roughness, dissipation and mass transfer is of interest (table 2).
(d) Self-organized elastic structures
In the preceding sections, I have discussed the self-organization ofinterface films and microtopography evolution. Another type of self-organizedmicrostructure is elastic slip waves. The mathematical formulation of quasi-staticsliding of two elastic bodies (half-spaces) with a flat surface and a frictionalinterface is a classical contact mechanics problem. Interestingly, the stability ofsuch sliding was not investigated until the 1990s, when Adams (1995) showed thatthe steady sliding of two elastic half-spaces is dynamically unstable, even at lowsliding speeds. Steady-state sliding was shown to give rise to a dynamic instabilityin the form of self-excited oscillations with exponentially growing amplitudes.These oscillations were confined to a region near the sliding interface and couldeventually lead to either partial loss of contact or to propagating regions of stick–slip motion (slip waves). The existence of these instabilities depends upon theelastic properties of the surfaces; however, it does not depend upon the frictioncoefficient, nor does it require a nonlinear contact model. The same effect waspredicted theoretically by Nosonovsky & Adams (2004) for the contact of roughperiodic elastic surfaces.
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

Frictional interface for green tribology 4765
0.50.7511.52
0.50.7511.52
clock
time
initial value
0 ++
++
++
add2
deformation
wear friction plot2
add1
adhesion
Ka/u
K–
B*u
roughness rate(adhesion)
integrator
2.50
(a)
(b) (c)initial roughness initial roughness
2.25
2.00
2.00
1.50
1.00roug
hnes
s, R
0.50
1.75
1.500 0.5 1.0 1.5 2.0
time, t (s)0 0.5 1.0 1.5 2.0
time, t (s)
coef
fici
ent o
f fr
ictio
n, m
1s
Kd*u –1*A*u
roughness rate(deformation)
plot roughness
Figure 5. Running-in. (a) The feedback model. Two simultaneous processes (adhesion anddeformation) affect surface roughness in different manners. Consequently, an equilibrium valueof roughness exists, which corresponds to minimum friction. The time dependence of (b) thecoefficient of friction and (c) the roughness versus time (with A = 1, B = 1). The coefficient offriction decreases, while roughness reaches its equilibrium value. Therefore, self-organization of therough interface results in the decrease of friction and wear. Adapted from Mortazavi et al. (2010).
Table 2. Entropic description of the surface roughness, friction and wear (Nosonovsky 2010).
information energy mass
surface roughness friction (dissipation) wear (mass flow)
Shannon entropy and entropyrate for a stochastic process
S = −B∑
j=1
pj log(pj )
thermodynamic entropy
dS = dQT
entropy of mixing(configurational)
DS = −Rn∑i
Ni
Nlog
Ni
N
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

4766 M. Nosonovsky
It is well known that two types of elastic waves can propagate in anelastic medium: shear and dilatational waves. In addition, surface elastic waves(Rayleigh waves) may exist, the amplitude of which decreases exponentiallywith distance from the surface. For two slightly dissimilar elastic materials incontact, generalized Rayleigh waves (GRWs) may exist at the interface zone. Theinstability mechanism described above is essentially one of GRW destabilization;that is, when friction is introduced, the amplitude of the GRW is no longerconstant but grows exponentially with time.
The stability analysis involves the following scheme. First, a steady-statesolution should be obtained. Second, a small arbitrary perturbation of thesteady-state solution is considered. Third, the small arbitrary perturbation ispresented as a superposition of modes, which correspond to certain eigenvalues(frequencies). Fourth, the equations of the elasticity (Navier equations) with theboundary conditions are formulated for the modes, and solved for the eigenvalues.Positive real parts of the eigenvalues show that the solution is unstable.
For the GRWs, the two-dimensional displacement field at the interface isgiven by
u =∑
k
uk(x , y, t),
v =∑
k
vk(x , y, t),
uk(x , 0, t) = Re[Ak eikx/leLt]and vk(x , 0, t) = Re[Bk eikx/leLt],
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭
(2.12)
where k stands for the x- or y-component of the displacement field at theinterface (y = 0), Ak is the complex amplitude, k/l is the wavenumber, l is thewavelength of the lowest wavenumber and L is the complex frequency. It can beshown that for the frictionless case L = ±il is pure imaginary and thus, for realAk , the displacement is a propagating generalized Rayleigh wave, uk(x , 0, t) =Ak cos(kx ± lt). It can be shown also that, if small friction with the coefficientm is present, then L = ±(il + am), where a is a real number, and thus one rootof L always has a positive real component, leading to instability (Adams 1995;Ranjith & Rice 2001). As a result, the amplitude of the interface waves growswith time. In a real system, of course, the growth is limited by the limits ofapplicability of the linear elasticity and linear vibration theory. This type offriction-induced vibration may be, at least partially, responsible for noise (suchas car brake squeal) and other effects during friction, which are often undesirable(Nosonovsky & Adams 2004).
Whereas the GRWs occur for slightly dissimilar (in the sense of their elasticproperties) materials, for very dissimilar materials, waves would be radiated alongthe interfaces, providing a different mechanism of pumping the energy away fromthe interface (Nosonovsky & Adams 2001). These waves can form a rectangulartrain of slip pulses that propagates, so that the two bodies shift relative to eachother in a ‘caterpillar’ or ‘carpet-like’ motion (figure 6). This microslip can leadto a significant reduction of the observed coefficient of friction, as the slip isinitiated at a shear load much smaller than mW (Nosonovsky & Adams 2001;Bhushan & Nosonovsky 2003).
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

Frictional interface for green tribology 4767
p
p p p
y
G′, v′, ρ′ θ′2θ′1θ1θ2G, v, ρ
p p
V0
q
q q q
q q
x
F
F
W
W
slip zone
stick zone
(a) (b)
Figure 6. (a) Elastic waves radiated from the frictional interface. (b) Friction reduction due topropagating stick–slip zones (Nosonovsky & Adams 2001).
The motion is observed as the reduction of the coefficient of friction (incomparison with the physical coefficient of friction m) to the apparent value ofmapp = q/p, where q is the applied shear force per unit area and p is the normalpressure. The slip pulses can be treated as ‘secondary structures’ self-organized atthe interface, which result in the reduction of the observed coefficient of friction.Note that the analysis in this case remains linear and it just shows that theequations of elasticity with friction are consistent with the existence of such waves.The amplitude of the slip waves cannot be determined from this analysis, sincethey are dependent on the initial and boundary conditions. In order to investigatewhether slip waves will actually occur, it is important to ask the question whetherit is energetically profitable for them to exist. To that end, the energy balanceshould be calculated for the work of the friction force and the energy dissipatedat the interface and radiated away from the interface. A stability criterion basedon equation (2.4) can be used.
(e) Self-organized criticality
The methods in the preceding subsections describe the onset of instability,which can lead to the self-organization of spatial and temporal structures. Thelinear stability analysis is independent of the amplitudes of small vibrations andin the case of instability it predicts an exponential growth of the amplitudes untilthey become so large that the linear analysis cannot apply any more. It is muchmore difficult to perform the nonlinear analysis to find the amplitudes and actualfinite motion. Several approaches have been suggested.
One is that a specific type of self-organization, known as SOC, plays a rolein frictional systems. SOC is a concept in the theory of dynamic systems thatwas introduced in the 1980s (Bak 1996). The best-studied example of SOC is the‘sandpile model’, representing grains of sand randomly placed into a pile untilthe slope exceeds a threshold value, transferring sand into the adjacent sites andincreasing their slope in turn. There are typical external signs of an SOC system,such as power-law behaviour (the magnitude distribution of the avalanches) anda ‘one-over-frequency’ noise distribution. The concept has been applied to suchdiverse fields as physics, cellular automata theory, biology, economics, sociology,linguistics and others (Bak 1996).
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

4768 M. Nosonovsky
In the case of dry frictional sliding, it has been suggested that a transitionbetween the stick and slip phases during dry friction may be associated withSOC, since the slip is triggered in a similar manner to the sandpile avalanchesand earthquake slides. Zypman et al. (2003) showed that in a traditional pin-on-disc experiment, the probability distribution of slip zone sizes follows a powerlaw. In a later work, the same group found nanoscale SOC-like behaviour duringatomic force microscopy studies of at least some materials (Zypman et al. 2003;Buldyrev et al. 2006). Thus ‘stick’ and ‘slip’ are two phases, and the systemtends to achieve the critical state between them: in the stick state elastic energyis accumulated until slip is initiated, whereas energy release during slip leads,again, to the stick state. Entropic methods of analysing frictional systems withSOC were used by Zypman and co-workers (Fleurquin et al. 2010), who calculatedthe Shannon entropy of the surface profile and showed that the entropy of theprofile decreased, indicating self-organization.
A different approach was suggested by Kagan (2010), who studied friction asa reaction–diffusion system (a Turing system) with the exchange of mass andheat. A Turing system is defined as the following system of n partial differentialequations:
vuvt
= DDu + f (u),
where D is the Laplace operator, u = (u1, u2, . . . , un) is interpreted as a vectorof reagent concentrations, and D is a diagonal diffusion matrix. The solutionsof reaction–diffusion equations display a wide range of behaviours, including theformation of travelling waves and wave-like phenomena as well as other self-organized patterns like stripes, hexagons, etc. During friction, the exchange ofheat (due to the friction) and matter (due to the wear) occurs, and thus atribosystem with coupled friction and wear can be viewed as a Turing system.
3. Self-lubrication
The term ‘self-lubrication’ implies the ability of details and components tooperate without lubrication and refers to several methods and effects, in additionto the above-mentioned, that reduce friction or wear. Among these methodsare the deposition of self-lubricating coatings that are either hard (to reducewear) or with low surface energy (to reduce adhesion and friction). Besidescoatings, self-lubrication refers to the development of metal-, polymer- or ceramic-based composite self-lubricating materials, often with a matrix that providesstructural integrity and a reinforcement material that provides low frictionand wear. Nanocomposites have become a focus of this research, as well asnumerous attempts to include carbon nanotubes and C60 fullerene molecules(Rapoport et al. 2003). Simple models assume that these large molecules andnanosized particles serve as ‘rolling bearings’ that reduce friction; however,it is obvious now that the mechanism can be more complicated and caninvolve self-organization.
Dynamic self-organization is thought to be responsible for self-lubricationin atomic force microscopy experiments with atomic resolution. A protectivelayer can also be formed due to a chemical oxidation reaction or reaction withwater vapour. For example, a self-lubricating layer of boric acid (H3BO3) is
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

Frictional interface for green tribology 4769
formed as a result of the reaction of water molecules with a B2O3 coating(Donnet & Erdemir 2004). Another type of self-lubricating material involveslubricant embedded into the matrix, e.g. inside microcapsules that rupture duringwear and release the lubricant. Surface microtexturing that provides holes anddimples that serve as reservoirs for the lubricant can be viewed as anothermethod of providing self-lubrication. In addition, I should mention that self-lubrication is also observed in many biological systems (e.g. human joints)and that the term ‘self-lubrication’ is used also in geophysics where it refersto anomalously low friction between tectonic plates that is observed duringsome earthquakes.
4. Surface healing
Self-healing or surface-healing materials constitute a special class of novel smartmaterials, usually composites, which are capable of repairing minor damagecaused by wear and deterioration (van der Zwaag 2009). Self-healing is anon-equilibrium process. When a system exchanges mass and energy with itssurroundings, various irreversible processes inside the system may interact witheach other. These interactions are called thermodynamic couplings and theyprovide a mechanism for a process without its primary driving force or theymay even move the process in a direction opposite to the one imposed by its owndriving force. For example, in thermodiffusion a substance diffuses because of atemperature gradient rather than a concentration gradient. When a substanceflows from a low- to a high-concentration region, it must be coupled with acompensating process. The principles of thermodynamics allow the progress of aprocess without or against its primary driving force Xn only if it is coupled withanother process. In the widely accepted linear approximation, the thermodynamicflows are related to the forces by
Jk =∑
n
LknXn , (4.1)
where Lkn are Onsager coefficients (De Groot & Mazur 1962). Many linearempirical laws of physics, such as Ohm’s law of electrical resistance, Fourier’slaw of heat conduction or Fick’s law of diffusion, which relate thermodynamicflows Jk with thermodynamic forces Xn , are consequences of the equations oflinear thermodynamics given in equation (4.1). The heat production per unittime is given by
dQdt
=∑
n
JnXn , (4.2)
and the rate of entropy production is
S = dQT dt
= 1T
∑n
JnXn , (4.3)
which is a linear function of thermodynamic flows.
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

4770 M. Nosonovsky
external force(e.g. friction)
degradationforce, Ydeg
deterioration flow, Jdeg
‘healing’force, Yheal
‘healing’ flow, Jheal
+ +
LN M H
x
z
system out ofequilibrium
Figure 7. Block diagram of the healing process. Deterioration is caused by an external force. Thedeteriorated system is brought out of equilibrium so that the restoring (‘healing’) force is created,which is coupled with the degradation flow through the parameter M .
In most self-healing schemes, the self-healing material is driven away fromthermodynamic equilibrium either by the deterioration process itself or by anexternal intervention, such as heating. After that, the composite slowly restoresthermodynamic equilibrium, and this process of equilibrium restoration drivesthe healing.
In order to characterize degradation, it is convenient to introduce a so-called‘degradation parameter’ x, to represent, for example, the wear volume or thetotal volume of cracks. When a self-healing mechanism is embedded in thesystem, another generalized coordinate, the healing parameter z, can also beintroduced, to represent, for example, the volume of released healing agent. Thecorresponding thermodynamic flows are linearly related to the thermodynamicforces (equation (4.1)) and entropy rates (equation (4.3)). The generalizeddegradation and healing forces are external forces that are applied to the system,and flows are related to the forces by the governing equations
J deg = LXdeg + MXheal
and J heal = NXdeg + HXheal,
}(4.4)
where L, M , N and H are corresponding Onsager coefficients (figure 7). Thedegradation force Xdeg is an externally applied thermodynamic force that causesthe degradation. In most self-healing mechanisms, the system is placed out ofequilibrium and the restoring force Xheal emerges. Since the restoring force iscoupled with the degradation parameter x by the negative coefficients N = M , italso causes degradation decrease or healing.
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

Frictional interface for green tribology 4771
x
y
W
F
Figure 8. Normal (y) and tangential (x) degrees of freedom during friction.
The surface is the most vulnerable part of a material sample, and, notsurprisingly, deterioration often occurs at the surface (wear, fretting, etc.) andis induced by friction. The empirical Coulomb (or Amontons–Coulomb) law offriction states that the dry friction force F is linearly proportional to the normalload force W ,
F = mW , (4.5)
where m is the coefficient of friction, which is independent of load, sliding velocityand the nominal area of contact. Unlike many other linear empirical laws, theCoulomb law cannot be directly deduced from the linear equations of non-equilibrium thermodynamics, such as equation (4.1). Indeed, in the case of dry orlubricated friction, the sliding velocity is the thermodynamic flow, V = J , which,in accordance with equation (2.4), should be proportional to the friction forceF = X (as is the case for viscous friction), so that the energy dissipation rate isgiven by the product of the thermodynamic flow and force,
j = JX = VF . (4.6)
However, the Coulomb friction force is independent of sliding velocity.To overcome this difficulty, consider the normal degree of freedom y, in addition
to the sliding coordinate x (figure 8). Introducing the normal degree of freedom isa standard procedure in the study of dynamic friction, where normal vibrationsare often coupled with the in-plane vibrations. Further, define the generalizedflows as J1 = x , J2 = y and forces as X1 = F , X2 = W (Nosonovsky 2010).
The thermodynamic equations of motion (4.1) immediately yield the law ofviscous friction in the form of(
xy
)=
[L11 L12L21 L22
] (FW
). (4.7)
Note that equation (4.7) is valid, in the general case, for the bulk of a three-dimensional deformable medium and not necessarily for the interface betweentwo solids.
The interface between sliding bodies has highly anisotropic properties, becausea small force in the direction of the interface causes large displacements, whereasa small force in the normal direction causes only small displacements. Tocompensate for this anisotropy, substitute coordinates using a small parameter 3as (x , y) → (3x , y). The force–displacement relationships are now given by(
xy
)=
[L11/3 L12/3L21 L22
] (FW
). (4.8)
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

4772 M. Nosonovsky
In the limit 3 → 0, equation (4.8) yields
F = −L12
L11W ,
x = L11F + L12W3
= 0/0
and y =(
L22 − L12L21
L11
)W .
⎫⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎭
(4.9)
Any velocity x satisfies equation (4.9), provided L11F + L12W = 0, which isexactly the case of Coulomb friction if m = −L12/L11 (Nosonovsky 2010).
Thus friction can be included into the linear framework of non-equilibriumthermodynamics as the force driving the degradation process (e.g. wear). Theforce that leads to healing should be related to the material microstructure inorder to design an optimized material with the highest potential for self-healingand self-lubrication.
5. Conclusions
Despite the fact that self-organization during friction has received relativelylittle attention in the tribological community so far, it has the potential for thecreation of self-healing and self-lubricating materials, which are important forgreen or environment-friendly tribology. The principles of the thermodynamics ofirreversible processes and of the nonlinear theory of dynamical systems are usedto investigate the formation of spatial and temporal structures during friction.These structures lead to friction and wear reduction (self-lubrication). The self-organization of these structures occurs through the destabilization of stationarysliding. The stability criteria involve minimum entropy production. A self-healingmechanism, which provides the coupling of degradation and healing, can beembedded into the material. Structure–property relationships were formulatedand can be used for the optimized design of self-lubricating and self-healingmaterials and surfaces for various ecologically friendly applications and greentribology.
The author acknowledges the support of the INSIC TAPE and UWM Research Growth Initiativeresearch grant. In addition, he would like to thank Mr Chuannfeng Wang and Mr Vahid Mortazavifrom the University of Wisconsin-Milwaukee for their help in producing figures 4 and 5.
References
Adams, G. G. 1995 Self-excited oscillations of the two elastic half-spaces sliding with a constantcoefficient of friction. Trans. ASME, J. Appl. Mech. 62, 867–872. (doi:10.1115/1.2896013)
Adams, G. G. 1998 Steady sliding of two elastic half-spaces with friction reduction due to interfacestick–slip. Trans. ASME, J. Appl. Mech. 65, 470–475. (doi:10.1115/1.2789077)
Adler, M., Ferrante, J., Schilowitz, A., Yablon, D. & Zypman, F. 2004 Self-organized criticalityin nanotribology. In Micro- and Nanosystems. MRS Symposium Proceedings, vol. 782, paperA5.1, p. 111. Warrendale, PA: Materials Research Society.
Bak, P. 1996 How nature works: the science of self-organized criticality. New York, NY: Springer.Bershadsky, L. I. 1992 On the self-organization and concepts of wear-resistance in tribosystems.
Trenie i Iznos (Russian Friction and Wear) 13, 1077–1094.
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

Frictional interface for green tribology 4773
Bershadsky, L. I. 1993 B. I. Kostetsky and the general concept in tribology. Trenie i Iznos (RussianFriction and Wear) 14, 6–18.
Bhushan, B. & Nosonovsky, M. 2003 Scale effects in friction using strain gradient plasticityand dislocation-assisted sliding (microslip). Acta Mater. 51, 4331–4340. (doi:10.1016/S1359-6454(03)00261-1)
Blau, P. J. 1989 Friction and wear transitions of materials: break-in, run-in, wear-in. Park Ridge,NJ: Noyes Publications.
Bryant, M. D., Khonsari, M. M. & Ling, F. F. 2008 On the thermodynamics of degradation. Proc.R. Soc. A 464, 2001–2014. (doi:10.1098/rspa.2007.0371)
Buldyrev, S. V., Ferrante, J. & Zypman, F. R. 2006 Dry friction avalanches: experiments andtheory. Phys. Rev. E 74, 066110. (doi:10.1103/PhysRevE.74.066110)
Dai, Z., Yang, S. & Xue, Q. 2000 Thermodynamic model of fretting wear. J. Nanjing Univ.Aeronaut. Astronaut. 32, 125–131.
Doelling, K. L., Ling, F. F., Bryant, M. D. & Heilman, B. P. 2000 An experimental study ofthe correlation between wear and entropy flow in machinery components. J. Appl. Phys. 88,2999–3003. (doi:10.1063/1.1287778)
Donnet, C. & Erdemir, A. 2004 Historical developments and new trends in tribological and solidlubricant coatings. Surf. Coat. Technol. 180–181, 76–84. (doi:10.1016/j.surfcoat.2003.10.022)
Fleurquin, P., Fort, H., Kornbluth, M., Sandler, R., Segall, M. & Zypman, F. 2010 Negentropygeneration and fractality in the dry friction of polished surfaces. Entropy 12, 480–489.(doi:10.3390/e12030480)
Fox-Rabinovich, G. S. & Totten, G. E. (eds) 2006 Self-organization during friction. Boca Raton,FL: CRC Press.
Fox-Rabinovich, G. S., Veldhuis, S. C., Kovalev, A. I., Wainstein, D. L., Gershman, I. S.,Korshunov, S., Shuster, L. S. & Endrino, J. L. 2007 Features of self-organization in ion modifiednanocrystalline plasma vapor deposited AlTiN coatings under severe tribological conditions.J. Appl. Phys. 102, 074305. (doi:10.1063/1.2785947)
Garkunov, D. N. 2004 Scientific discoveries in tribotechnology. Moscow: MSHA (in Russian).Gershman, I. S. & Bushe, N. 2006 Elements of thermodynamics of self-organization during friction.
In Self-organization during friction. Advanced surface-engineered materials and systems design(eds G. S. Fox-Rabinovich & G. E. Totten), pp. 13–58. Boca Raton, FL: CRC Taylor & Francis.
De Groot, S. R. & Mazur, P. 1962 Non-equilibrium thermodynamics. New York, NY: Interscience.Haken, H. 1983 Synergetics. An introduction. Nonequilibrium phase transitions in physics, chemistry
and biology, 3rd edn. New York, NY: Springer.Jun, Q., Linan, A. & Blau, P. J. 2006 Sliding friction and wear characteristics of Al2O3–Al
nanocomposites. In Proc. STLE/ASME Int. Joint Tribology Conf. New York, NY: ASME.Kagan, E. 2010 Turing systems, entropy, and kinetic models for self-healing surfaces. Entropy 12,
554–569. (doi:10.3390/e12030554)Klamecki, B. E. 1980 Wear—an entropy production model. Wear 58, 325–330.Mortazavi, V., Wang, C. & Nosonovsky, M. 2010 Shannon entropy as a characteristic of a rough
surface: why the running-in transient process leads to friction reduction. In Proc. STLE/ASME2010 Int. Joint Tribology Conf. IJTC2010-41135.
Nicolis, G. & Prigogine, I. 1977 Self-organization in nonequilibrium systems. New York, NY: Wiley.Nosonovsky, M. 2010 Entropy in tribology: in the search for applications. Entropy 12, 1345–1390.
(doi:10.3390/e.12061345)Nosonovsky, M. & Adams, G. G. 2001 Dilatational and shear waves induced by the frictional sliding
of two elastic half-spaces. Int. J. Eng. Sci. 39, 1257–1269. (doi:10.1016/S0020-7225(00)00085-9)Nosonovsky, M. & Adams, G. G. 2004 Vibration and stability of frictional sliding of two elastic
bodies with a wavy contact interface. Trans. ASME, J. Appl. Mech. 71, 154–300. (doi:10.1115/1.1653684)
Nosonovsky, M. & Bhushan, B. 2009 Thermodynamics of surface degradation, self-organizationand self-healing for biomimetic surfaces. Phil. Trans. R. Soc. A 367, 1607–1627. (doi:10.1098/rsta.2009.0009)
Nosonovsky, M. & Bhushan, B. 2010 Surface self-organization: from wear to self-healing in biologicaland technical surfaces. Appl. Surf. Sci. 256, 3982–3987. (doi:10.1016/j.apsusc.2010.01.061)
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from

4774 M. Nosonovsky
Nosonovsky, M., Amano, R., Lucci, J. M. & Rohatgi, P. K. 2009 Physical chemistry of self-organization and self-healing in metals. Phys. Chem. Chem. Phys. 11, 9530–9536. (doi:10.1039/b912433k)
Prigogine, I. 1968 Thermodynamics of irreversible processes. New York, NY: Wiley.Prigogine, I. 1980 From being to becoming. San Francisco, CA: WH Freeman.Prigogine, I. & Stengers, I. 1984 Order out of chaos. New York, NY: Bantam.Ranjith, K. & Rice, J. R. 2001 Slip dynamics at an interface between dissimilar materials. J. Mech.
Phys. Solids 49, 341–361. (doi:10.1016/S0022-5096(00)00029-6)Rapoport, L., Fleischer, N. & Tenne, R. 2003 Fullerene-like WS2 nanoparticles: superior lubricants
for harsh conditions. Adv. Mater. 15, 651–655. (doi:10.1002/adma.200301640)van der Zwaag, S., van Dijk, N. H., Jonkers, H. M., Mookhoek, S. D. & Sloof, W. G. 2009 Self-
healing behaviour in man-made engineering materials: bioinspired but taking into account theirintrinsic character. Phil. Trans. R. Soc. A 367, 1689–1704. (doi:10.1098/rsta.2009.0020)
Zmitrowicz, A. 1987 A thermodynamical model of contact, friction, and wear. Wear 114, 135–221.Zypman, F., Ferrante, J., Jansen, M., Scanlon, K. & Abel, P. 2003 Evidence of self-organized
criticality in dry sliding friction. J. Phys. Condens. Matter 15, L191–L196. (doi:10.1088/0953-8984/15/12/101)
Phil. Trans. R. Soc. A (2010)
on May 21, 2018http://rsta.royalsocietypublishing.org/Downloaded from





























