Embed Size (px)
Citation preview

Available online at www.sciencedirect.com
www.elsevier.com/locate/cma
Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
Self-learning simulation method for inverse nonlinear modelingof cyclic behavior of connections
Gun Jin Yun a,*, Jamshid Ghaboussi b, Amr S. Elnashai b
a Department of Civil Engineering, The University of Akron, Akron, OH 44325-3905, USAb Department of Civil and Environmental Engineering, The University of Illinois at Urbana-Champaign, Urbana, IL 61801, USA
Received 17 April 2007; received in revised form 18 January 2008; accepted 21 January 2008Available online 12 February 2008
Abstract
This paper presents an improved self-learning simulation and its application to modeling of ‘cyclic’ behavior of the connections fromthe results of structural testing. Unlike other inverse modeling approaches such as parameter optimization methods, the proposedmethod requires no prior knowledge about the behavior and model. It can extract the cyclic connection models by imposing experimentalmeasurements to the dual finite element models as boundary conditions. A new algorithmic tangent formulation during the self-learningsimulation has been proposed to improve performances of the self-learning simulation. Moreover, a new neural network (NN) basedhysteretic material model is utilized to expedite learning of the cyclic behavior and it is integrated into the improved self-learning sim-ulation method. To guide a practical implementation of the self-learning simulation, numerical procedures are also presented in detail.Using both synthetic and actual experimental data, the self-learning simulation method has proven to be a reliable method to extractnonlinear cyclic models of the local connections from the global response of the framed structures.� 2008 Elsevier B.V. All rights reserved.
Keywords: Self-learning simulation; Inverse problem; Neural networks; Cyclic models; Beam–column connections; Nonlinear analysis
1. Introduction
Inelastic behavior of the connections significantly affectsthe global response of the framed structure subjected to thecyclic or dynamic loading because the connections areoften primary sources of the energy dissipation due to thehysteretic damping. Over the past years, cyclic models forthe connections have been developed through structuraltests of the components or systems. Because responses ofthe entire framed structures are of our primary interestsunder earthquake loading, structural testing at the systemlevel has become more common recently [1–3]. If the localconnection behavior is not directly measured from the glo-bal structural test data, characterizing severely nonlinearbehavior of the connection requires solutions of an inverse
0045-7825/$ - see front matter � 2008 Elsevier B.V. All rights reserved.
doi:10.1016/j.cma.2008.01.021
* Corresponding author. Tel.: +1 330 972 8489; fax: +1 330 972 6020.E-mail address: [email protected] (G.J. Yun).
nonlinear modeling problem that has challenging issues ofthe non-uniqueness and ill-posedness. For example, onlyforce–displacement time histories at each floor of a three-story framed structure are measured from a pseudo-dynamic testing and severely inelastic fractures at multiplelocations are observed. Then modeling of the connectionbehavior needs a back calculation of the moment–rotationpairs from the parsimonious measurements at every timestations using the equilibrium and compatibility conditionfrom the fundamental mechanics. Because the number ofconnections to be identified is greater than that of themeasurements, there could be multiple combinations ofthe moments at the connections that give the same set ofthe force–displacement measurements. Considering thatthe connections already behave in the inelastic regimeunder reversed cyclic loading and there could be variousuncertainties due to measurement errors and different con-struction qualities, the inverse nonlinear modeling taskbecomes much more challenging. Therefore, a reliable

G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2837
method to characterize the severely nonlinear behavior ofthe connections under cyclic or dynamic loading conditionsis needed. Extracting the local nonlinear models of the con-nections in a numerical model from actual global structuralresponses is a viable and efficient modeling approachbecause they can be directly used in the model to predictresponses under a new loading condition.
Generally, a practical issue faced in the application ofthe inverse modeling is ill-posedness which is associatedwith the non-uniqueness of the solution [4]. Numerousstudies have been conducted on the inverse modeling solu-tion methods such as parameter optimization methods [5],Multi-objective genetic algorithms [6], and filtered MonteCarlo and Markov chain Monte Carlo method [7], etc.However, they remain challenging with respect to the ill-posedness [8]. Because they explicitly require a priori
known mathematical model, little freedom to alter themodels is given to the modeling problem. Recently, aself-learning simulation methodology has been researchedfor solving the inverse nonlinear modeling problems withnon-parametric modeling techniques. It has been investi-gated for the soil constitutive model [9–11], the rate-depen-dent material model [12] and the thermal constitutivemodel [13]. A unique feature of the self-learning simulationmethod is that a priori knowledge about behavior of mate-rials is not required and the model is gradually developedfrom structural test data through the self-organizing learn-ing capability of the neural networks (NN). However, stud-ies on developing the cyclic material model through theself-learning simulation have been very limited partlybecause the existing NN based models have shown difficul-ties in capturing the complex nonlinear and path dependentbehavior of materials under the reversed cyclic loadingcondition. Recently, Furukawa et al. suggested an implicitconstitutive modeling for visco-plasticity using NN and aNN based model for accurate cyclic plasticity model[14,15]. Although the model showed a good performancewithin general finite element codes, additional proceduresare required to train the NN for describing internal mate-rial behavior. In 2006, Yun et al. proposed a new NNbased material model for hysteretic behavior of materialswhich is proved to be effective in capturing multi-axialmaterial behavior under cyclic loading conditions [16,17].As aforementioned, the self-learning simulations have beenapplied for constitutive modeling of the soil [9–11], the con-crete [12] and the thermal constitutive model [13]. In thispaper, studies on cyclic behavior of materials within theinverse analysis framework have been carried out. More-over, various practical issues on the effect of the load stepsize and the formulation of the NN models on the perfor-mance are still questionable for the practical application ofthe self-learning simulation.
This paper presents a new self-learning simulationframework to characterize cyclic behavior of the connec-tions from structural testing. The proposed self-learningsimulation framework is a new extension of the originalauto-progressive training algorithm proposed by Gha-
boussi et al. [18], whereby analysis with displacementboundary conditions is conducted for correcting error fromthe analysis with force boundary conditions. The self-learn-ing simulation has been improved by introducing a newalgorithmic tangent stiffness formulation with the newNN based model during the auto-progressive training. Itis capable of performing on-line training of the NN basedconnection model through incorporating the experimentaldata with usual incremental nonlinear finite element analy-sis. To model the cyclic behavior, the novel NN basedmaterial model is used. The NN based cyclic materialconstitutive model has a superior learning capability com-pared to the conventional NN based material models. Inaddition, detail numerical procedures of the self-learningsimulation with the new application to beam–column con-nections are expected to open its wide applications in theinverse nonlinear modeling problems.
2. Modeling of framed structures with neural network based
connection models
In this study, three-dimensional beam–column elementsare used in conjunction with the new NN based model formodeling the entire framed structural system. In particular,this study focuses on modeling of post-yielding and post-limit behavior of the connection under cyclic loading.Because the inelastic behavior of the connections in theframed structure is very often induced by large displace-ments under failure mechanisms, the geometrical nonlinear-ity is considered in this paper. The material nonlinearity atthe structural connections is also considered by a concen-trated inelasticity model approach. An incremental-itera-tive scheme based on the Newton–Raphson method isemployed to conduct nonlinear static and dynamic analy-ses. Brief discussions on the three-dimensional beam–col-umn element are followed by the new NN based modelemployed in this paper.
2.1. Geometrically nonlinear beam–column element
Beams and columns are modeled by the geometricalnonlinear three-dimensional beam–column element in thisstudy. In order to obtain the geometric tangent stiffnessof the three-dimensional beam–column element, an incre-mental equilibrium equation should be derived from a vir-tual work expression. First, the potential energy of thestructural system is expressed as follows:Y
p
¼ 1
2
ZV
eijrij dV �Z
Vuibi dV �
ZS
uiT i dS; ð1Þ
where bi is the component of a body force vector over thevolume V, Ti is the component of a traction vector on thesurface S, and eij and rij are the strain and stress compo-nents. Assuming that there is no change in the shape ofthe section, three in-plane strain components e22, e33 ande23 are assumed to be zero. By taking a variation of the

2838 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
potential energy and applying the stationary potential en-ergy principle, the variation of the potential energy shouldbe zero d
Qp = 0. Substituting de = Bdu for the strain field
and applying Cauchy stress principle 2T ¼ 2p2n, the equi-librium equation is expressed at the current configurationC2 byZ
VBT
02rdV �
ZV
NT2bd2V �Z
SNT2p2�n d2S ¼ 0; ð2Þ
where NT is the shape function matrix and BT is the strain–displacement matrix. In the Updated Lagrangian formula-tion, the finite element formulation is determined from thevirtual work expression written at C2 referring to C1 asshown in Fig. 1b. Using the relationships d2V ¼ 1
2Fj jd1Vand 2p2�nd2S ¼ 2p 1
2Fj j12FT1�nd1S (the Nansen’s formula),the equilibrium equation can be written in the referenceconfiguration C1 as follows:Z
1VBT
12rd1V �
Z1V
NT2b 12F�� ��d1V
�Z
1S
NT2p 12F�� ��
12FT1�nd1S ¼ 0; ð3Þ
where 12F and 1
2F are the Lagrangian and Eulerian defor-mation gradients at C2 with respect to C1, respectively.Taking the derivative of the first term of Eq. (3) withrespect to time and introducing nonlinear relationshipbetween strain and nodal displacement vector, the incre-
i
-1
i i i i2 2 2 2u ;F M
i i i i1 1 1 1u ;F M
i i i i3 3 3 3u ;F M
GPGP
x2
x3
C0
C1
C2
ji
Projected deformation on X1-X3
Projected deformation on
'1x'
2x
'3x
1D
iΔ12
u 1
1iu
a
b
ω
ω
ω
Fig. 1. Three-dimensional beam–column element: (a) nodal forces and d
mental equilibrium equation can be described in rate formas
Kþ Kg
� �2 _u ¼ 2 _P;
2 _u ¼ h2 _ui1;
2 _ui2;
2 _ui3;
2 _hi1;
2 _hi2;
2 _hi3;
2 _uj1;
2 _uj2;
2 _uj3;
2 _hj1;
2 _hj2;
2 _hj3i
T;
2 _P ¼ h2 _F i1;
2 _F i2;
2 _F i3;
2 _Mi1;
2 _Mi2;
2 _Mi3;
2 _F j1;
2 _F j2;
2 _F j3;
2 _Mj1;
2 _Mj2;
2 _Mj3i
T;
ð4Þ
where 2 _P and 2 _u indicate the rate of the nodal force and dis-placement vector in the current configuration C2 as shownin Fig. 1a, and K and Kg indicate the linear elastic and geo-metric stiffness matrices, respectively. The detail derivationof the tangent stiffness matrices can be referred in Ref. [19].
To calculate the nonlinear internal resisting force vectorat each iterative step, a change in axial length caused bybending and torsional deformations is considered and rigidbody motion is excluded from the increment of the dis-placement increment [19].
2.2. Neural network based cyclic connection model
Nonlinear connection behavior is represented by a newNN based model. In the model, two internal variables playan important role in learning complex hysteretic behaviorby transforming a multiple-valued mapping of the hystere-sis into a single-valued mapping. Its symbolic notation can
j
j j j j2 2 2 2u ;F M
j j j j1 1 1 1u ;F M
j j j j3 3 3 3u ;F M
+1ξ
GP
x1
X1-X2
2ju
ju
ω
ω
ω
isplacements; (b) deformation states at three different configurations.

;
G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2839
be expressed in terms of the moment and rotation asfollows:
Mn ¼ bM NN hn; hn�1;Mn�1; nh;n;Dgh;n
� �: NN architecturef g
� �ð5Þ
where nh,n = Mn�1hn�1 and Dgh,n = Mn�1Dhn are the twointernal variables, M = moment, h = rotation, bM NN andhNN : R5 ! R are the functional mapping to be establishedthrough NNs and n indicates nth time (or load) step. InFig. 2, the two internal variables are depicted in one-
θ
M
n 1−θ nθ
n 1M −
n n 1 n−1M −ξ = θ
θ,n n−1 nMΔη = Δθ
M
θn 1−θ
n 1M −
n Mn−1 n−1ξ =
M,n n 1 nM−Δη = θ Δ
nM
a
b
θ
Fig. 2. Internal variables defined for NN based cyclic connection model:(a) displacement control form; (b) stress resultant control form.
NN
NN NN
NN
i
j
i j
j
i
j
Zero-length NN-based connection model
Δ Δ Δ
Δ Δ
Δ
Fig. 3. Neural network based connection mod
dimensional moment–rotation space for both the displace-ment and stress resultant control form. In this paper, onlythe displacement control form is employed. The first inter-nal variable nh,n implies its previous state along the loadpath by its energy quantity and Dgh,n or DgM,nimplies thedirection for next time or load step along the load path.The single-valued relationship between the stress resultantand displacement are mathematically proved in a previousstudy by authors [17].
A concentrated plastic hinge approach has been adoptedfor the implementation of the NN based cyclic model in thefinite element model as shown in Fig. 3. The plastic hingeelement can be placed at any location where severe yield-ing, local buckling and tearing of the components mayoccur.
For the sake of simplicity, only the interactions betweenbiaxial moments are considered in the formulation. How-ever, it is noteworthy that the formulation can be extendedto full interactions between all the six stress resultants ifinteractions between the six stress resultants are significant.In order to make it easy to implement it to any incrementalnonlinear finite element codes, an incremental equilibriumequation of the connection is described as follows. A tan-gent stiffness matrix relates the increments of the actionsto those of the deformations.
dM2
dM3
¼
oM2
oa2
oM2
oa3
oM3
oa2
oM3
oa3
26643775 da2
da3
¼ KNN
con
� � da2
da3
;
whereda2
da3
¼ dhj
2 � dhi2
dhj3 � dhi
3
( );
ð6Þ
where i and j mean the ith node and jth node of the connec-tion model and da2 and da3 are the increments of the axialdeformation and rotational displacement around two localaxes (2 and 3). KNN
con indicates the explicit form of the tan-gent stiffness of the connection. The tangent stiffness of
j
ii
Δ
Δ
el combined with beam–column element.

M
(k)n
(k) n 1 n 1 (k)n n 1 n
K is determined by input
{ , , M , , } and output M− −− − θ θθ θ ξ Δ η
n 1M −
n 1−θ nθ
nM
(1)nRΔ
(2)nRΔ
(k)nθ n 1−θ n 1
n
M −n 1−
θξ n 1−θΔ η
(k)nM
… …
……(1) (1)n n n 1I M M −Δ = −
(2) (2) (1)n n nI M MΔ = −
(1)nθ (2)
nθ 1
Fig. 4. Calculations of incremental internal resisting force and tangent stiffness using NN based model.
2840 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
the connection model in general finite element codes is arelationship between the rates of moment and rotation as
Kcon ¼oðdMÞoðdhÞ : ð7Þ
With a finite rotation increment Dh which is Dh� dh, thetangent stiffness is not uniquely defined since it can be cal-culated at any sub-increment of size dh. Therefore, an algo-rithmic tangent stiffness has been widely used for numericalimplementation of nonlinear constitutive models. This is aconsistent linearization of nonlinear incremental constitu-tive relations.
Kcon ¼oðnþ1DMÞoðnþ1DhÞ ; where nþ1DM
¼ nþ1DM� nDM and nþ1Dh ¼ nþ1Dh� nDh: ð8Þ
Recently, an explicit formulation method of the algorith-mic material tangent stiffness for NN based material mod-els was proposed [20]. The numerical implementationmethod has been employed to derive the tangent stiffnessmatrix for the NN based model. The NN based algorithmic(or consistent) tangent stiffness is expressed in terms of acti-vation values from hidden layers, input/output values, con-nection weights as well as scale factors, as in Eq. (9). Sincethe new internal variables are expressed in terms of currentmoment and rotation increment, the algorithmic tangentstiffness for the connection model can be derived as
KNNcon;ij ¼
oDnþ1Mi
oDnþ1hj
¼ Sri
Sej
b3XNC
k¼1
"1� nþ1MNN
i
� �2n o
bwrCik
� ��
XNB
l¼1
1� nþ1Ck
� �2n o
bwCBkl
h i
� 1� nþ1Bl
� �2n o
b wBhlj þ wBSV
ljnMNN
j
� �h i!#; ð9Þ
where KNNcon;ij indicates the algorithmic tangent stiffness, b is
the steepness parameter (1 or 1/2), Sri and Se
i are the scalefactors input and output values, respectively, Ck is the acti-
vation values from the second hidden layer, Bl is the activa-tion value from the first hidden layer, and wij is theconnection weight between neuron i and neuron j [19].Compared with other stress resultant plasticity models,the formulation of the NN based connection model doesnot need either strength surface or interaction equationthat is required in numerical integrations.
Kþ Kg þX
RTKNNcon R
h i2 _u ¼ 2 _P; ð10Þ
where R is the transformation matrix and K and Kg are thelinear elastic and geometric stiffness matrices. Tangent stiff-ness matrices of the connection elements are assembledwith a global tangent stiffness through a normal assem-blage procedure before applying the constraint equationsfor the displacement boundary conditions.
2.3. Solution strategy for nonlinear equilibrium equation
In this paper, a mixed incremental-iterative solutionstrategy is used to solve the nonlinear equilibrium equationfor both nonlinear static and transient dynamic analysis.To use the NN based model in the nonlinear analysis, a for-ward passing of the inputs through the trained NNs isneeded to calculate the tangent stiffness matrices and thenonlinear internal resisting force vectors as illustrated inFig. 4.
For the NN based model, the material tangent stiffnessmatrices are formed in an algorithmic tangent scheme toavoid spurious loading or unloading stiffness during itera-tions. There is an obvious benefit from the algorithmic tan-gent scheme since the accuracy of the prediction by the NNbased models gradually improves as iteration proceeds incase of using a constant load (or time) step size.
3. Self-learning simulation methodology
Self-learning simulation methodology is based on theauto-progressive training algorithm [18] for the NN basedmaterial constitutive model. Recently, the self-learning

G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2841
simulation methodology has been applied to several appli-cations [9,12,10]. A unique advantage of the simulationmethodology is that it can extract the material constitutivemodel by linking structural test data with nonlinear finiteelement analysis. In this paper, the self-learning simulationhas been enhanced with a new algorithmic formulation of
End
Pre-Training of NN-bas
Read Reference D
Run Auto-Progressive
Initialize State of FE
Start NN Pass=1: NN
Start Load Increment=
Start Auto-P Cycle=1
Check Auto-Progressi
Update Current State of
n > INCR
iPass > NN Pa
Start
Append New Input
TrainingData Base
No
Y
No
Y
Y
No
FEM-A
Newton-Raphson Iteration with Force B.C .
Update
Solve
Check Convergence
Calculate (k) T NNn n dvΔ = ΔI B
tK(k) (k )
t n nΔ = ΔK U R
Ne
σ
Fig. 5. Flow chart of self
the NN based cyclic material model for its application ininverse nonlinear modeling of the connection model.
In the following sections, a numerical implementation ofthe auto-progressive training algorithm is highlighted. Fur-thermore, the pre-training issues, static and dynamic for-ward analysis and the algorithmic formulation of the NN
ed Model
ata
Training
A
Model
Pass
1: INCR
:NCycle
ve Cycle
FE Model
ss
Pattern
es
es
es
FEM-B
wton-Raphson Iteration with Displacement B.C.
Update
Solve
Check Convergence
Calculate (k) T NNn n dvΔ = ΔI B
tK(k) (k )
t n nΔ = ΔK U R
σ
-learning simulation.

2842 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
based model within the self-learning simulation areexplained.
3.1. Auto-progressive training algorithm
Since its application is for developing the NN based cyc-lic connection model, the simulation framework is inte-
Move to next load
(a) Apply loads
Connection points
Calculate= measurem
Structural Test : Connections
Ye
Fig. 6. Auto-progressive
Training DB
{Input pattern}_1
{Input pattern}_ki
Auto-progressivecycle i at load step k
Auto-progressivecycle i+1 at load step k
FEM
-A :
Mk_
ia
.
.
.
.
{Input pattern}_2FEM
-B :
k_ib
{Input pattern}_ki
FEM
-A :
Mk_
i+1a
FEM
-B :
k_i+
1b
discard
Trai
{Input p
{Input p
.
.
.
.
{Input p
A
θ θ
Fig. 7. Building of training data bas
grated with a nonlinear finite element analysis codedeveloped in this paper. An overall flowchart for thenumerical procedures of the self-learning simulation isdescribed in Fig. 5. Main three features of the self-learningsimulation in its numerical procedures are: (1) two paralleliterative procedures for solving nonlinear problems areperformed, that is, FEM-A and FEM-B; (2) there is an
ing step i+1
Extract Moment (b) Apply deformation Extract Rot. Disp
M
DB for training
Update NN Material Model By Training
……
…………
nM
n M
ent ?
User current N
N m
aterial model
Loading step i
M
F
No
s
training algorithm.
ning DB
attern}_1
attern}_ki+1
attern}_2
Auto-progressivecycle 1 at load step k+1
FEM
-A :
M(k
+1)
_ia
FEM
-B :
(k+
1)_i
b Training DB
{Input pattern}_1
{Input pattern}_ki+1
.
.
.
.
{Input pattern}_2
{Input pattern}_(k+1)1
Cri
teri
a fo
r cy
cle
satis
fied
θ
e during self-learning simulation.

G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2843
additional iterative loop called auto-progressive cyclesbetween the loops for the load increments and the equilib-rium iterations; (3) the outmost loop is for NN Pass whichis one complete pass of all the load increments. The objec-tive of having several NN Passes is to improve the trainingdata base for the NN model by restarting the whole anal-ysis with the latest NN based model and training data base.
Priori information needed for the auto-progressive algo-rithm is the measured force and displacement data at cer-tain points but not local moment–rotation relationship atthe connections. The latter is initially masked and extractedfrom the subsequent simulation. At each load step (or timestep), two FE analyses (FEM-A and FEM-B) are per-formed: in the FEM-A, the measured forces are applied;and, in the FEM-B, the measured displacements areenforced. The local stress resultant vector at the connec-tions from FEM-A represents acceptable approximationof the actual stress resultant vector. The local displacement
……
……
……
FEM-A
nNNcon,ijK
∂Δ=
∂Δ
b(i) b a an n 1 n 1 n; ;M ;M− − −θ θ
n NNiM
NN Model
Fig. 8. Case I: algorithmic tangent stiffness fo
FEM-A
n 1 NNNN icon,ij n 1
j
MK
+
+
∂Δ=
∂Δ θ
a(i) a a a a a an n 1 n 1 n 1 n 1 n 1 n; ;M ;M ;M− − − − −θ θ θ Δθ
n NNiM
……
……
……
NN Model*
Fig. 9. Case II: algorithmic tangent stiffness fo
vector from FEM-B is considered to be a good approxima-tion of the actual displacement vector.
Evolution of the NN based model is primarily attributedto the auto-progressive cycles. One rationale of the auto-progressive training algorithm is illustrated in Fig. 6. It istrue that the auto-progressive cycle plays an essential rolein developing the NN based connection model during theself-learning simulation because it directly enables theNN model to learn realistic behavior of the connectionthrough updating training data base followed by training.One auto-progressive cycle is completed by: (1) conductingNewton–Raphson iterations of two FE models in FEM-Aand FEM-B; (2) appending a new input pattern to thetraining data base; (3) retraining the NN based model withthe updated training data base; (4) checking the criteria forstopping the auto-progressive cycles. In the next auto-pro-gressive cycle of the current load increment, the NN con-nection weights are kept but the last input pattern will be
FEM-B
1 NNi
n 1j
M+
+ θ
b a b1 n 1 n 1 n;M− −θ Δθ
rmulation during self-learning simulation.
FEM-Bb(i) b b b b b bn n 1 n 1 n 1 n 1 n 1 n; ;M ;M ;M− − − − −θ θ θ Δθ
n NNiM
n 1 NNNN icon,ij n 1
j
MK
+
+
∂Δ=
∂Δ θ
……
……
……
NN Model*
*Note that NN Models are the same
rmulation during self-learning simulation.

2844 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
replaced by a new input pattern obtained in the next auto-progressive cycle. A detail process for building up the train-ing data base is illustrated in Fig. 7. The auto-progressivecycles are usually performed three to five cycles per eachload increment. It continues until a displacement error cri-terion is satisfied with a user-defined tolerance.
x-dispza
3.2. Pre-training of neural network based connection model
To start the self-learning simulation, the NN basedmodels should be trained initially with initial stiffness val-ues known from experimental data or design equationsbased on simple mechanics. There are data base programswhich contain monotonic testing results on various connec-tion types [21–23]. Those data base programs provide var-ious experimental observations including initial rotationalstiffness and plastic flexural resistance for various connec-
-150
-100
-50
0
50
100
150
-150 -100 -50 0 50 100 150 200
X-displacement (mm)
Y-d
ispl
acem
ent (
mm
)
A B C
A=63.5 mmB=127.0 mmC=152.4 mm
-150.0
-100.0
-50.0
0.0
50.0
100.0
150.0
-200.0 -100.0 0.0 100.0 200.0
X-displacement (mm)
Y-d
ispl
acem
ent (
mm
)
A B C
A=63.5 mmB=127.0 mmC=152.4 mm
a
b
Fig. 10. Non-proportional cyclic loading cases: (a) load Case 1; (b) loadCase 2.
tion types. For stable starting of the self-learning simula-tion, the pre-training data are enriched with additionaldata generated by varying the load step size of the first loadincrement both in loading and unloading direction.
3.3. Algorithmic tangent stiffness formulation of neural
network based model
When using a NN based model for characterizing non-linear behavior of the connections, the NN model givesan approximation to the consistent tangent stiffness. To
y-disp
4060
mm
Lp
= 3
50 m
m
Distributing coupling element
NN
3710
mm
350
mm
b
Fig. 11. Numerical models: (a) 3D finite element model for simulated testand equivalent plastic strain contour; (b) simplified 3D model with theproposed NN based connection model.

Table 1Training information of the NN based plastic hinge element for load Case1
Number of epochs used intraining
NNarchitecture
Average error intraining
50,000 {4-28-28-1} 9.227 � 10�6
G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2845
avoid the divergence of the Newton–Raphson iterativealgorithm, the NN based model should be trained enoughto represent a good approximation of the actual tangentstiffness and lead to a rapid convergence. Because theNN based model directly predicts stress resultant moments,it does not need any iteration in a plasticity calculation butonly forward propagations of input patterns through thetrained NN based model are required for calculations ofthe nonlinear internal forces and the consistent tangentstiffness matrices. Since the displacements and stress resul-tant vectors are generated from two FE analyses, FEM-Aand FEM-B within the self-learning simulation, the inputpattern could be constructed in two different ways asshown in Eqs. (11) and (12). Eq. (11) is referred to as CaseI and Eq. (12) is referred to as Case II from now on. Cases Iand II are illustrated in Figs. 8 and 9, respectively.
KNNcon;ij ¼
oDnþ1 bM NNi h bðiÞ
n ; hbn�1;M
an�1; n
abh;n;Dgab
h;n; fNNg� �
oDnþ1hj
for both FEM-A and FEM-B; ð11Þ
where superscript ‘a’ and ‘b’ indicate the values from FEM-A and FEM-B, respectively and ‘i’ indicates the ith iterativestep, ‘n’ indicates the current load step, ‘n � 1’ is the last con-verged load step, nab
h;n ¼ Man�1h
bn�1 and Dgab
h;n ¼ M an�1 Dhb
n . Thesuperscript ‘ab’ on the internal variables means that the two
-2000
-1500
-1000
-500
0
500
1000
1500
2000
0 50
Loa
3D Finite Ele
Proposed Mo
-2000
-1500
-1000
-500
0
500
1000
1500
2000
0 50 1
Loa
Forc
e in
Y-d
irec
tion
(kN
)Fo
rce
in X
-dir
ectio
n (k
N)
3D Finite Elemen
Proposed Model (
a
b
Fig. 12. Comparisons of time histories of forces for 3D finite element model anX direction; (b) force in Y direction.
internal variables consist of moments and rotational defor-mations from FEM-A and FEM-B, respectively.
KNNcon;ij ¼
oDnþ1 bM NNi haðiÞ
n ; han�1;M
an�1; n
ah;n;Dga
h;n; fNNg� �
oDnþ1hj
for FEM-A;
KNNcon;ij ¼
oDnþ1 bM NNi hbðiÞ
n ; hbn�1;M
bn�1; n
bh;n;Dgb
h;n; fNNg� �
oDnþ1hj
for FEM-B:
ð12Þ
In this paper, two algorithmic tangent stiffness formula-tions of Eqs. (11) and (12) will be tested for the self-learn-ing simulation.
However, for calculating the nonlinear internal resistingforces, the input patterns for the auto-progressively trainedNNs are expressed by
100 150 200
d Step
ment Analysis
del (NN Model + 3D Beam Elements)
00 150 200
d Step
t Analysis
NN Model + 3D Beam Elements)
d NN connection model combined with beam–column element: (a) force in

2846 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
M ðiÞNN ¼ bM NN haðiÞ
n ; han�1;M
an�1; n
ah;n;Dga
h;n; fNNg� �
for FEM-A;
M ðiÞNN ¼ bM NN hbðiÞ
n ; hbn�1;M
bn�1; n
bh;n;Dgb
h;n; fNNg� �
for FEM-B:
ð13Þ
Because the accuracy in the prediction of the nonlinearinternal resisting forces greatly affects the convergence dur-ing iterative calculations, the source of the input valuesshould be the same for the dual FE analysis.
3.4. Static and dynamic forward analysis
After training the NN based connection model throughthe self-learning simulation, the NN based model can beused for nonlinear static and transient dynamic simulation.This subsequent analysis with the trained NN models froma self-learning simulation is called as forward analysis. Ifactual experimental data are available and the NN based
-1500
-1000
-500
0
500
1000
1500
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
X Displacement (m)
X F
orce
(kN
)
3D Finite Element Analysis
Proposed Model (NN Model +3D Beam Elements)
-1500
-1000
-500
0
500
1000
1500
-0.15 -0.1 -0.05 0 0.05 0.1 0.15
Y Displacement (m)
Y F
orce
(kN
)
3D FiniteElement Analysis
Proposed Model (NN Model +3D Beam Elements)
a
b
Fig. 13. Comparisons of cyclic behaviors for 3D finite element model andNN connection model combined with beam–column element: (a) force–displacement in X direction; (b) force–displacement in Y direction.
connection model is trained directly from the experimentalresult, the NN based model can be used in nonlineardynamic analysis. In this paper, nonlinear static analysiswith the NN based model is defined as static forward anal-ysis and nonlinear dynamic analysis with the NN basedmodel is defined as dynamic forward analysis.
4. Numerical examples
The NN based cyclic connection model is a new model-ing method which is fundamentally different from the exist-ing phenomenological models. In this section, theperformance of the proposed methodology is illustratedwith several examples. In the first example, the NN basedconnection model in conjunction with the three-dimen-sional beam–column element are verified by reproducingthe behavior observed in a 3D simulated testing of a canti-lever structure under non-proportional cyclic loading. Inthe second example, the cyclic NN connection model istested in an inelastic dynamic analysis and its generaliza-tion characteristics are also demonstrated. In the thirdexample, the proposed self-learning simulation methodol-ogy is verified with simulated experimental data. Sensitivi-
-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
-6000 -4000 -2000 0 2000 4000 6000
Mx (kN*m)
My
(kN
*m)
3D Finite Element Analysis
-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
-6000 -4000 -2000 0 2000 4000 6000
Mx (kN*m)
My
(kN
*m)
Proposed Model (NN Model+ 3D Beam Elements)
a
b
Fig. 14. Comparisons of load paths in bi-moment space for: (a) 3D finiteelement model; (b) NN connection model combined with beam–columnelement.

G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2847
ties of the two different algorithmic formulations to loadstep sizes are investigated and an improved algorithmic for-mulation for the self-learning simulation is proposed.Finally, actual experimental data on a model two-storysteel moment-frame with semi-rigid connections is usedto develop the cyclic connection model with the self-learn-ing simulation.
Table 2Geometrical properties of test specimen [21]
Components Dimension
Beam Welded section: H 250 � 130 � 9 � 9Column Rolled section: H 150 � 150 � 7 � 10Top/bottom angle L 75 � 75 � 9: length 150Web angle L 75 � 75 � 8: length 190Bolt Diameter 16 mm
Table 3Capacity of semi-rigid connection for Ramberg-Osgood model fromJMRC Software [22]
Initial rotationalstiffness (Ki)
Flexural resistance(M0)
Semi-rigid connection(bolted with angles)
13916.85 (kN m/rad) 36.044 (kN m)
Table 4Training information of the NN based connection model
Number of epochsused in training
NNarchitecture
Average errorin training
NN based modelfor 1st floor
20,000 {5-50-50-1} 3.253 � 10�6
NN based modelfor 2nd floor
20,000 {5-50-50-1} 5.699 � 10�6
-80.00
-60.00
-40.00
-20.00
0.00
20.00
40.00
60.00
80.00
-0.010 -0.005 0.000 0.005 0
Rotat
Mom
ent (
kN*m
)
Reference Model
NN-based Connection Model
Fig. 15. Comparisons of moment–rotatio
4.1. Verification of the NN based connection model
To get the training data for the NN based connectionmodel, a tubular cantilever structure is modeled by athree-dimensional finite element model. The tubular sec-tion has a diameter, 609.6 mm and thickness, 38.9 mm.The material is assumed to show a bilinear behavior withthe following physical properties: Young’s modulusE = 200,000 MPa; poisson ratio m = 0.3; yield stressry = 248.2 MPa and hardening stiffness = 0.1E. Two non-proportional cyclic loading cases are tested, which areapplied at the tip of the tubular column in X directionand Y direction with displacement boundary conditionsas shown in Fig. 10. The plastic hinge length is determinedas 700 mm considering the equivalent plastic strain at thesupport as shown in Fig. 11a. To get the rotational defor-mation through the assumed plastic hinge length, three-dimensional distributing coupling elements are used asshown in Fig. 11a. The moment at the plastic hinge is cal-culated by multiplying the tip force by the distance fromthe tip of column to the center of plastic hinge. Themoment–rotation data are used to train the NN based con-nection model. The training information is summarized inTable 1. After training, the NN based connection elementis plugged into beam–column element model for finite ele-ment analysis.
The numerical model employing the NN based connec-tion model has 18 degrees of freedom as shown in Fig. 11b.The degrees of freedoms (Dx, Dy, Dz and Rz) at the ends ofNN based connection element except Rx and Ry are con-strained. The column is modeled by the 3D beam–columnelement and linear elastic behavior is assumed. In thisexample, the hardening stiffness is set to 0.1E. The repre-sentation of the NN based connection model can beexpressed as follows:
.010 0.015 0.020 0.025 0.030
ion (Rad)
n hysteresis at the second connection.

2848 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
Mxn
Myn
¼ cMNN hx;n; hy;n; hx;n�1; hy;n�1;Mx;n�1;My;n�1; nhx;n;
��Dghx;n; nhy;n;Dghx;n
�: 8-28-28-2f g
�; ð14Þ
where Mx and My indicate the moment in x and y direc-tion, hx and hy are the rotation in x and y direction, n indi-
-80.00
-60.00
-40.00
-20.00
0.00
20.00
40.00
60.00
80.00
-0.015 -0.010 -0.005 0.000 0
Rotat
Mom
ent (
kN*m
)
Reference Model
NN-based Connection Model
Fig. 16. Comparisons of moment–rotati
-120.0
-100.0
-80.0
-60.0
-40.0
-20.0
0.0
20.0
40.0
60.0
80.0
100.0
0 2 4 6
Time Step
Mom
ent (
kN-m
)
Reference Model
Proposed Model with Trained NN Con
-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0 1 2 3 4 5 6 7
Time (se
Dis
plac
emen
t (m
)
Reference Model
Proposed Model with Trained NN Conne
a
b
Fig. 17. Comparisons of (a) moment at the second connection and (b
cates the nth load step, and n and Dg indicate the internalvariables for hysteretic behavior.
Fig. 12 shows the comparisons of forces in X and Y
direction for 3D FE analysis and the proposed modelunder the non-proportional cyclic loading Case 1. Compar-ing the total number of DOFs in 3D FE model (=22,287)
.005 0.010 0.015 0.020 0.025
ion (Rad)
on hysteresis at the first connection.
8 10 12 14 16
(sec)
nection Model
8 9 10 11 12 13 14 15 16
c)
ction Model
) displacement at the second floor under a new loading condition.

9 ft
5.5 ft
5.5 ft
2xP
P
0.5”
2”
2 1/2”
5”
4” x 4” x 0.5” L
W 5 x 15 Beam & Column
13/16” Holes for3/4” Bolts
Connection 1
Connection 2
-15
-10
-5
0
5
10
15
0 2 4 6 8 10 12 14 16 18 20 22 24 26
Load Step
Forc
e, P
(kN
)
Cyclic Loading
Fig. 18. Two-story frame structure with semi-rigid connections [23].
Table 5Parameters used in self-learning simulation for total 260 load steps
Parameters used in self-learning simulation
Number of NN pass tried 6Number of auto-progressive cycles
in each load step3
Criteria for the auto-progressive cycle Tol_avg 0.005Tol_max 0.005
NN architecture {5-15-15-1}NN epochs for pre-training 1000NN epochs for auto-progressive training 100
G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2849
and Simplified Model (=14), the simplified model withwell-trained NN based connection models is proved to bevery efficient to predict the response if the NN based modelis sufficiently trained. For the non-proportional cyclic load-ing Case 2, the comparisons of the cyclic behavior of theforce and displacement are depicted in Fig. 13. Fig. 14shows load paths in bi-moment space for 3D FE modeland the simplified model for the same load case.
Because the NN based connection model is trained bydata generated from 3D FE analysis in all cases, good cor-relations between the two simulations are observed.Sources of the observed discrepancies are caused by thesimplification and accumulation of the prediction errorby the NN model within the simplified finite element anal-ysis. However, there are three advantages in the proposedsimulation method: (1) the NN based connection modelcan represent any complex hysteretic behavior learnedeither from 3D finite element analysis or experimental mea-surements. (2) The computations of the tangent stiffnessmatrix and internal resisting forces are relatively easierthan any plasticity based model. (3) The trained NN basedconnection model can be reused and updated with newtraining data because of self-adaptive learning capabilitiesof the NNs.
4.2. Verification of the NN based connection model in
inelastic dynamic analysis
In this example, the cyclic NN connection model istested in an inelastic dynamic analysis and its generaliza-tion characteristics are also demonstrated. The test modelis chosen as a half model of a two-story frame with semi-
rigid connections which was tested using an explicitpseudo-dynamic testing method by Elnashai et al. [24].Geometrical dimensions of the test specimen are summa-rized in Table 2. In the numerical model, each beam ismodeled by three beam elements and each column is mod-eled by one element. Two concentrated masses, 8000 kg ateach story, are assumed in the numerical model and all theelements are assumed to have density of 7.85 ton/m3. Thefirst 15 s of the N–S component of 1940 Imperial Valley(El centro) earthquake acceleration record was used asthe ground acceleration. The peak ground acceleration isscaled up to 0.45 g. The time step 0.01 s was used in thepseudo-dynamic testing. Mass proportional damping onlyis assumed with 5% and 0.5% damping ratio for the firstand second mode, respectively.
The training data set is generated from an inelasticdynamic simulation using the identical finite element modeland Ramberg-Osgood model instead of the NN model.The Ramberg-Osgood model is expressed as (h/h0) = (M/

2850 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
M0) + (M/M0)n. The initial stiffness is defined as Ki = M0/h0. n defines the steepness of the curve. Using JMRC (jointmoment rotation curve) software package [25], the initialrotational stiffness (Ki) and flexural resistance (M0) of thegiven semi-rigid connections are obtained. The determinedvalues from design parameters of the given connection aresummarized in Table 3. After the dynamic simulationunder the earthquake ground motion, the moment androtational deformation of the lumped spring element areextracted to train the NN based model.
Two different NNs are used for the first and second floorbeam–column connections. Information on the training ofthe two NNs is given in Table 4. Each NN has an inputlayer, two hidden layers and an output layer, with 50 neu-rons per hidden layer. The NN based connection model isrepresented as follows:
Mnþ1 ¼ bM NN hnþ1; hn;Mn; nh;n;Dgh;n
� �: 5-50-50-1f g
� �;
ð15Þ
where nh,n and Dgh,n indicate the internal variables for expe-diting learning capabilities of the NNs.
The trained NN based models are plugged into the finiteelement model for the inelastic dynamic simulation. The
-25
-20
-15
-10
-5
0
5
10
15
20
25
-0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025
Rotation (Rad)
Mom
ent (
kN*m
)
Simulated Test with Reference ModelCase I (NN Pass 1)Case I (NN Pass 8)
Connection 1
-25
-20
-15
-10
-5
0
5
10
15
20
25
-0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025
Rotation (Rad)
Mom
ent (
kN*m
)
Simulated Test with Reference ModelCase II (NN Pass 1)Case II (NN Pass 8)
Connection 1
a
b
Fig. 19. Static forward analysis results after self-learning simulation with130 total load steps: (a) moment–rotation for Case I; (b) moment–rotationfor Case II.
results are compared with the reference results from theFE analysis with Ramberg-Osgood model in Figs. 15 and16. These results clearly show that the NNs models havelearned the cyclic behavior of the connection well enoughto reproduce the complex hysteretic response of the con-nections with reasonable accuracy.
For testing the generalization capability of the trainedNN models, a negatively damped harmonic motion insteadof the earthquake ground motion is imposed on the FEmodel with the trained NN connection models. Fig. 17shows comparisons of the moment at the second connec-tion and the horizontal displacement at the second floorfor reference model with Ramberg-Osgood model and theproposed model with the trained NN models. Since the glo-bal response is mainly governed by the local connectionbehavior, the displacement at the second floor in Fig. 17bcan partly check the accuracy of the prediction made bythe trained NN models. The reason for this generalizationcapability of the trained NN models is because the new NNhysteretic model has an intrinsic nature that it memoriesmany geometric positions and direction at each point inthe moment–rotation space due to many cycles as well aspath dependency owing to having previous moment–rota-
-25
-20
-15
-10
-5
0
5
10
15
20
25
-0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025
Rotation (Rad)
Mom
ent (
kN-m
)
Simulated Test with Reference Model
Case I (NN Pass 1)
Case I (NN Pass 8)
Connection 1
-20
-15
-10
-5
0
5
10
15
20
-0.005 -0.002 0.001 0.004 0.007 0.01
Rotation (Rad)
Mom
ent (
kN-m
)
Simulated Test with Reference ModelCase I (NN Pass 1)Case I (NN Pass 8)
Connection 2
a
b
Fig. 20. Static forward analysis results for Case I after self-learningsimulation with 65 total load steps: (a) connection 1; (b) connection 2.

G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2851
tion pair in the input. This is very beneficial to its general-ization capability since the NN hysteretic models can be re-trained with new data available and become more general-ized due to their adaptive learning capability.
As shown in Fig. 17a, considerable discrepancies areobserved at the peak moments in the last three cycles. Itis only because the moment values presented to the NNmodels in the last three cycles of the new loading areexceeding the range of the moment values used in the train-ing. However, the prediction error can be removed if theNN models are trained with extended range of momentvalues. This is one of the well-known features of the NNs.
4.3. Verification of self-learning simulation with synthetic
structural test
In this example, the proposed self-learning simulationmethod is verified with a synthetic structural test. The teststructure model is a one-bay and two-story steel moment-frame from Ref. [26]. The frame has four semi-rigid connec-tions with bolted angles as shown in Fig. 18. The semi-rigidconnections are also modeled by Ramberg-Osgood modelwith an initial rotational stiffness of 4520 kN m and yielding
-25
-20
-15
-10
-5
0
5
10
15
20
25
-0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02
Rotation (Rad)
Mom
ent (
kN*m
)
NN Pass 1
Simulated Test
-25
-20
-15
-10
-5
0
5
10
15
20
25
-0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02
Rotation (Rad)
Mom
ent (
kN*m
)
NN Pass 4
Simulated Test
Connection 1
a b
c d
Fig. 21. Cyclic moment–rotation relationship at connection 1 from static forw
moment of 14.69 kN m from Ref. [26]. The Ramberg-Osgood shape parameter (n) is set to 5.0. For numericalmodeling of the test structure, one beam–column elementis used per each beam and column and the NN based con-nection model is located at the column face.
A single NN is used to represent the four connectionmodels, since the nonlinear characteristics of the connec-tions at the first and second stories are similar. The onlydifference is that they are subjected to different ranges ofmoments and rotations. The parameters used in the self-learning simulations are summarized in Table 5. For pre-training the NN based models, data within a small linearelastic range; �5 kN m 6M 6 +5 kN m and �0.00111rad 6 h 6 + 0.00111 rad are generated and the NNs arepre-trained up to 1000 epochs.
4.3.1. Sensitivities of the algorithmic tangent stiffness
formulations to various load step sizes
Performances of the two algorithmic formulationsexplained in Section 3.3 for the calculation of the tangentstiffness values during the self-learning simulation are com-pared under various load step sizes. For this investigation,two load step sizes; 130 load steps and 65 load steps are
-25
-20
-15
-10
-5
0
5
10
15
20
25
-0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02
Rotation (Rad)
Mom
ent (
kN*m
)
NN Pass 3
Simulated Test
Connection 1
-25
-20
-15
-10
-5
0
5
10
15
20
25
-0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02
Rotation (Rad)
Mom
ent (
kN*m
)
NN Pass 6 Simulated Test
Connection 1
ard analysis: (a) NN Pass 1; (b) NN Pass 3; (c) NN Pass 4; (d) NN Pass 6.

2852 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
tested with the same number of load cycles. In order tomake this comparison meaningful, two Cases I and II aretested under the identical conditions. The trained NN con-nection models from the self-learning simulation are usedin static forward analyses and their performance are com-pared with each other.
As shown in Fig. 19, both Case I and Case II showedgradual developments of the NN based cyclic connectionmodels with total 130 load steps. In the case of total 65load steps, the formulation based on Eq. (11) only couldgive convergent solutions as shown in Fig. 20 and the for-mulation based on Eq. (12) diverged under the same condi-tions. Moreover, NN models from the formulation basedon Eq. (11) shows better representation of the referencemodel than the one based on Eq. (12). Therefore, the for-mulation based on Eq. (11) is used in this example.
4.3.2. Self-learning simulation for developing NN based
cyclic connection model
The self-learning simulation was successfully completedup to the sixth NN passes. The static forward analysis
-20
-15
-10
-5
0
5
10
15
20
-0.004 -0.002 0 0.002 0.004 0.006 0.008 0.01
Rotation (Rad)
Mom
ent (
kN*m
)
NN Pass 1
Simulated Test
Connection 2
-20
-15
-10
-5
0
5
10
15
20
-0.004 -0.002 0 0.002 0.004 0.006 0.008 0.01
Rotation (Rad)
Mom
ent (
kN*m
)
NN Pass 4
Simulated Test
Connection 2
a b
c d
Fig. 22. Cyclic moment–rotation relationship at connection 2 from static forw
results are displayed from Figs. 21 to 23. Gradual improve-ment of the NN based model through multiple NN Passesby the auto-progressive algorithm is shown in Figs. 21 and22. Global responses in terms of horizontal forces and dis-placements are compared in Fig. 23.
As expected, the accurate representation of the localbehavior by the NN based connection model lead to betterprediction of the global response. Both the local and globalresponses indicate that the NN model gradually learns thenonlinear cyclic behavior of the connections in the simu-lated test. Therefore, if real experimental data are used,the proposed self-learning simulation is expected to giverealistic model of cyclic behavior of connections.
4.4. Verification of self-learning simulation with real
experimental data
In this example, the self-learning simulation is con-ducted with real experimental data from a structural test-ing of a half of one-bay and two-story steel frame withsemi-rigid connections [24,27]. The tested structure, intro-
-20
-15
-10
-5
0
5
10
15
20
-0.004 -0.002 0 0.002 0.004 0.006 0.008 0.01
Rotation (Rad)
Mom
ent (
kN*m
)
NN Pass 3
Simulated Test
Connection 2
-20
-15
-10
-5
0
5
10
15
20
-0.004 -0.002 0 0.002 0.004 0.006 0.008 0.01
Rotation (Rad)
Mom
ent (
kN*m
)
NN Pass 6
Simulated Test
Connection 2
ard analysis: (a) NN Pass 1; (b) NN Pass 3; (c) NN Pass 4; (d) NN Pass 6.

-15
-10
-5
0
5
10
15
-0.075 -0.05 -0.025 0 0.025 0.05 0.075 0.1
Displacement (m)
Forc
e (k
N)
NN Pass 6
Simulated Test
Second Floor
-25
-20
-15
-10
-5
0
5
10
15
20
25
-0.06 -0.04 -0.02 0 0.02 0.04 0.06
Displacement (m)
Forc
e (k
N)
NN Pass 6
Simulated Test
c
First Floor
a
b
Fig. 23. Cyclic force–displacement relationships from static forwardanalysis: (a) second floor; (b) first floor.
G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2853
duced in Section 4.1, is used in the current example.The frame with top-and-seat-angle-with-double-web-angle(TSADWA) connections was tested under a cyclic loadingwith a static testing procedure. The test (SRB02) was car-ried out using a hybrid load–displacement control proce-dure to simulate the first mode response. The secondfloor actuator was used to impose a horizontal displace-ment history and the actuator restoring force was mea-sured. It was used to drive the first floor actuator sothat the ratio of the actuator forces at the second andthe first floor was maintained at 2:1. It could ensure thefirst-mode-dominated response during the testing. Thetesting was paused several times at the zero force positionfor allowing visual inspections of the connection compo-nents. Interruption of test could be one of the sources ofuncertainties and variations in the observed responses.According to the test results from SRB02, pinching ofthe force–displacement hysteresis loop was observed at
the displacements larger than 8 cm because of yieldingand separation of connection angles. However, the testresults showed very stable hysteretic behavior up to theend of the test.
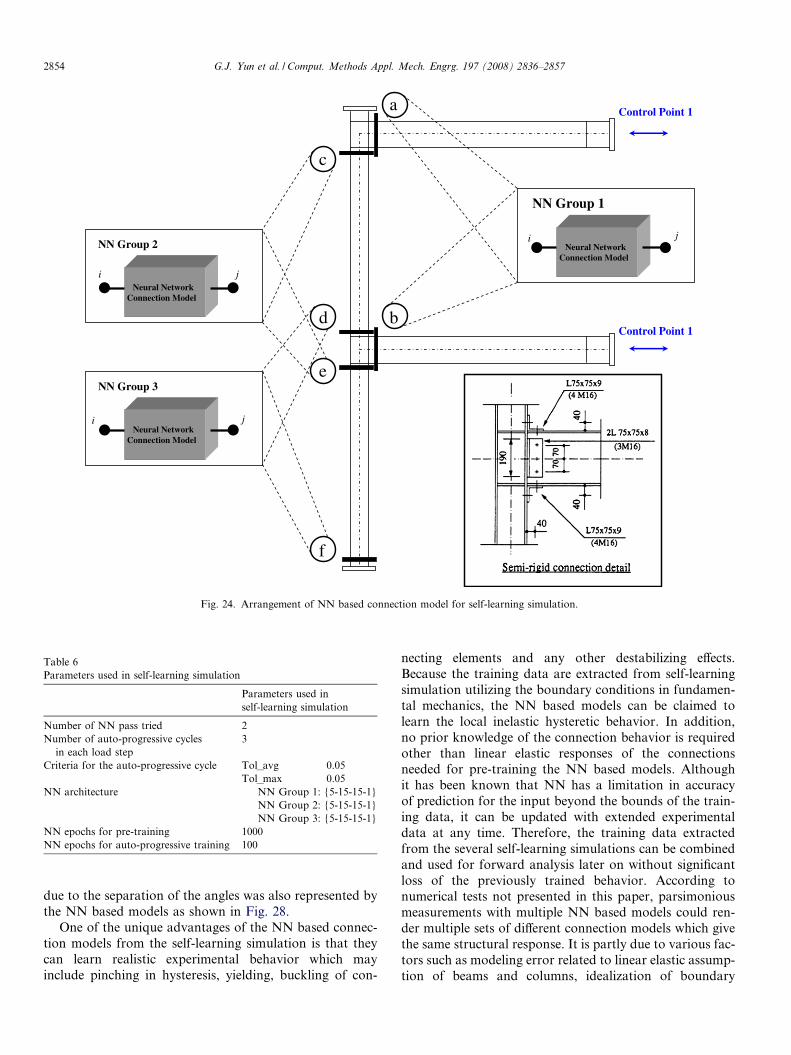
For a self-learning simulation, two control points at theends of beams is used to impose the displacement andforce boundary conditions in the horizontal direction. Atotal of 38 three-dimensional beam–column elements areused in the finite element model. The geometrical nonlin-earity is considered for the simulation. The material isdefined by Young’s modulus of 2.08 � 108 kN/m2 andPoisson ratio of 0.3. Because detail observations couldnot be obtained from Ref. [27], two arrangements of theNN based connection models are tested. In the first case,three different NN connection models are used for twosemi-rigid connections and column base. The three NNmodels are independently trained during the self-learningsimulation, that is, they do not share training data basewith one another. In the second case, three groups of theNN models are arranged as shown in Fig. 24 accordingto signs of bending moments and ranges of their magni-tudes. Generally, capability of using multiple NN basedmodels in a single self-learning simulation is very beneficialsince users can manage different NN based models each ofwhich corresponds to different connection types. The num-ber of different NN models in a single self-learning simula-tion totally can be determined differently for the problemgiven. The parameters used in the self-learning simulationare listed in Table 6.
Before starting the self-learning simulation, a set of pre-training data are generated assuming the linear elasticrotational behavior of connections within small ranges ofthe moment and rotational deformation. A total of twoNN Passes are carried out. The auto-progressively trainedNN based connection models are used in the followingstatic forward analysis. With the first arrangement ofNN based models, static forward analysis is conducted.Figs. 25 and 26 show comparisons for the time historyof the horizontal displacements at the first and secondfloors, respectively. The NN based models show goodagreements with the experimental observations. Evidently,assumption of rigid connections can result in significantunderestimates of the global responses as shown in Figs.25 and 26.
In comparisons of Fig. 27, the NN based models arealso shown to be able to represent a slight pinching inthe force–displacement hysteresis which was observed inthe experiment. The self-learning simulation with the sec-ond arrangement is also carried out to obtain the NNbased connection models. Using the obtained NN models,a static forward analysis is conducted under the forceboundary conditions. As shown in Fig. 28, a comparisonof the moment–horizontal displacements for the experi-mental and the static forward analysis verifies that theself-learning simulation can capture the local nonlinearconnection behavior from the test measurements. Pinching
a
b
c
d
e
f
Neural NetworkConnection Model
i
NN Group 1
Neural NetworkConnection Model
NN Group 2
Neural NetworkConnection Model
NN Group 3
Control Point 1
Control Point 1
j
ji
ji
Fig. 24. Arrangement of NN based connection model for self-learning simulation.
Table 6Parameters used in self-learning simulation
Parameters used inself-learning simulation
Number of NN pass tried 2Number of auto-progressive cycles
in each load step3
Criteria for the auto-progressive cycle Tol_avg 0.05Tol_max 0.05
NN architecture NN Group 1: {5-15-15-1}NN Group 2: {5-15-15-1}NN Group 3: {5-15-15-1}
NN epochs for pre-training 1000NN epochs for auto-progressive training 100
2854 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
due to the separation of the angles was also represented bythe NN based models as shown in Fig. 28.
One of the unique advantages of the NN based connec-tion models from the self-learning simulation is that theycan learn realistic experimental behavior which mayinclude pinching in hysteresis, yielding, buckling of con-
necting elements and any other destabilizing effects.Because the training data are extracted from self-learningsimulation utilizing the boundary conditions in fundamen-tal mechanics, the NN based models can be claimed tolearn the local inelastic hysteretic behavior. In addition,no prior knowledge of the connection behavior is requiredother than linear elastic responses of the connectionsneeded for pre-training the NN based models. Althoughit has been known that NN has a limitation in accuracyof prediction for the input beyond the bounds of the train-ing data, it can be updated with extended experimentaldata at any time. Therefore, the training data extractedfrom the several self-learning simulations can be combinedand used for forward analysis later on without significantloss of the previously trained behavior. According tonumerical tests not presented in this paper, parsimoniousmeasurements with multiple NN based models could ren-der multiple sets of different connection models which givethe same structural response. It is partly due to various fac-tors such as modeling error related to linear elastic assump-tion of beams and columns, idealization of boundary

-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0 50 100 150 200 250 300 350
Load Step
Hor
izon
tal D
ispl
acem
ent (
m) NN Model (NN Pass 2)
Rigid Connection
Experiment
Fig. 25. Comparisons of time history of horizontal displacement at the first floor.
-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0.25
0 50 100 150 200 250 300 350
Load Step
Hor
izon
tal D
ispl
acem
ent (
m)
NN Model (NN Pass 2)
Rigid Connection
Experiment
Fig. 26. Comparisons of time history of horizontal displacement at the second floor.
G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2855
conditions, measurement noise and error from structuraltesting, interaction effects between actuators and struc-tures. Therefore, further research is being conducted bythe authors to resolve the problems.
5. Summary and conclusions
An improved self-learning simulation methodology, anovel inverse nonlinear modeling approach to inelastichysteretic response of beam–column connections, hasbeen proposed. A new NN based hysteretic connectionmodel integrated with the geometrically nonlinear beam–column element has been presented. The modeling tech-nique has been verified with nonlinear static and dynamicanalysis problems. Following the modeling techniques, anew algorithmic tangent stiffness formulation method ofthe NN cyclic models during self-learning simulation hasbeen proposed to improve performances of the self-learn-ing simulation. For the purpose, varying the load stepsize, two formulations are compared with respect to per-
formances of the self-learning simulation. In addition,numerical procedures have been presented for practicalimplementations of the self-learning simulation. Throughthe self-learning simulation using both synthetic andactual experimental data, it has been shown that nonlin-ear cyclic models of the local connections are successfullyextracted from global responses of the framed structures.As NN Passes are repeated, the NN based model isshown to gradually learn local connection behavior undergiven conditions. The trained NN based model used instatic forward analyses shows slightly pinched behaviorof the bolted-angle connection as observed in the experi-ment. Owing to the self-learning capability of the NN rep-resentation, the modeling approach can be applied tosteel-concrete composite components. However, furthersystematic work is needed for addressing the uniquenessof the connection behavior obtained from the self-learningsimulation. In addition, strategies on constructing thetraining data for generalization capability would bewelcome.

-50
-40
-30
-20
-10
0
10
20
30
40
50
-0.25 -0.20 -0.15 -0.10 -0.05 0.00 0.05 0.10 0.15 0.20 0.25
Displacement (m)
Forc
e (k
N)
NN based Model (NN Pass 2)
Experiment
First Floor
-50
-40
-30
-20
-10
0
10
20
30
40
50
-0.25 -0.20 -0.15 -0.10 -0.05 0.00 0.05 0.10 0.15 0.20 0.25
Displacement (m)
Forc
e (k
N)
NN based Model (NN Pass 2)
Experiment
Second Floor
a
b
Fig. 27. Comparisons of cyclic force–displacement behavior from staticforward analysis with NN models trained up to NN Pass 2: (a) first floor;(b) second floor.
-60
-40
-20
0
20
40
60
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
Horizontal Displacement at the Top (m)
Mom
ent (
kN*m
)
NN based Model (NN Pass 1)
Experiment
Fig. 28. Moment–horizontal displacement hysteresis at the second floorby NN based model.
2856 G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857
References
[1] A. Elnashai, B. Spencer, D. Kuchma, G. Yang, J. Carrion, Q. Gan, S.Kim, Large and small scale simulations on the multi-axial full-scalesub-structured testing and simulation (MUST-SIM) facility at theUniversity of Illinois at Urbana-Champaign, in: NATO Workshop on
Seismic Assessment and Rehabilitation of Existing ReinforcedConcrete Buildings Istanbul, Turkey, May 30–June 1, 2005.
[2] A.S. Elnashai, B.F. Spencer, D. Kuchma, J. Ghaboussi, Y. Hashash,G. Quan, Multi-axial full-scale sub-structured testing and simulation(MUST-SIM) facility at the University of Illinois at Urbana-Champaign, in: Proceedings of the 13th World Conference onEarthquake Engineering Vancouver, Canada, August 2004.
[3] Y.M.A. Hashash, J. Ghaboussi, G.J. Yun, A.S. Elnashai, Develop-ment of software framework for MUST-SIM; an integrated compu-tational and experimental simulation facility, in: 13th WorldConference on Earthquake Engineering Vancouver, BC, Canada,2004.
[4] N. Zabaras, K.A. Woodbury, M. Raynaud, Inverse Problems inEngineering – Theory and Practice, American Society of MechanicalEngineers, New York, 1993.
[5] G.N. Vanderplaats, Numerical Optimization Techniques forEngineering Design with Applications, McGraw-Hill, New York,1984.
[6] T. Furukawa, Parameter identification with weightless regularization,Int. J. Numer. Methods Engrg. 52 (2001) 219–238.
[7] R.B. Statinkov, J.B. Matusov, Multi-criterion Optimization andEngineering, Chapman & Hall, New York, 1995.
[8] S. Akkaram, D. Beeson, H. Agarwal, G. Wiggs, Inverse modelingtechnology for parameter identification, Struct. Multidiscip. Optim.34 (2007) 151–164.
[9] Y.M.A. Hashash, C. Marulanda, J. Ghaboussi, S. Jung, Systematicupdate of a deep excavation model using field performance data,Comput. Geotech. 30 (2003) 477–488.
[10] H.S. Shin, G.N. Pande, On self-learning finite element codes based onmonitored response of structures, Comput. Geotech. 27 (2000) 161–178.
[11] D. Sidarta, J. Ghaboussi, Constitutive modeling of geomaterialsfrom non-uniform material tests, Comput. Geotech. 22 (1998)53–71.
[12] S. Jung, J. Ghaboussi, Characterizing rate-dependent materialbehaviors in self-learning simulation, Comput. Methods Appl. Mech.Engrg. 196 (2006) 608–618.
[13] W. Aquino, J.C. Brigham, Self-learning finite elements for inverseestimation of thermal constitutive models, Int. J. Heat Mass Transf.49 (2006) 2466–2478.
[14] T. Furukawa, M. Hoffman, Accurate cyclic plastic analysis using aneural network material model, Engrg. Anal. Bound. Elem. 28 (2004)195–204.
[15] T. Furukawa, G. Yagawa, Implicit constitutive modeling for visco-plasticity using neural networks, Int. J. Numer. Methods Engrg. 43(1998) 195–219.
[16] G.J. Yun, J. Ghaboussi, A.S. Elnashai, Neural network-basedconstitutive model for cyclic behavior of materials, in: The firstEuropean Conference on Earthquake Engineering and SeismologyGeneva, Switzerland, 2006.
[17] G.J. Yun, J. Ghaboussi, A.S. Elnashai, A new neural network-basedmodel for hysteretic behavior of materials, Int. J. Numer. MethodsEngrg. 73 (2008) 447–469.
[18] J. Ghaboussi, D.A. Pecknold, M.F. Zhang, R.M. Haj-Ali, Autopro-gressive training of neural network constitutive models, Int. J.Numer. Methods Engrg. 42 (1998) 105–126.
[19] G.J. Yun, Modeling of hysteretic behavior of beam–column connec-tions based on self-learning simulation, Ph.D. Thesis, Department ofCivil and Environmental Engineering, University of Illinois atUrbana-Champaign, 2006.
[20] Y.M.A. Hashash, S. Jung, J. Ghaboussi, Numerical implementationof a neural network based material model in finite element analysis,Int. J. Numer. Methods Engrg. 59 (2004) 989–1005.
[21] W.F. Chen, S. Toma, Advanced Analysis of Steel Frames, CRCPress, 1994.
[22] N. Kishi, W.F. Chen, Database of Steel Beam-to-Column Connec-tions, School of Civil Engineering, Purdue University, Lafayette, IN,1986.

G.J. Yun et al. / Comput. Methods Appl. Mech. Engrg. 197 (2008) 2836–2857 2857
[23] K. Weinand, SERICON – Databank on Joints in Building Frames,in: Proceedings of the 1st COST C1 Workshop Strasbourg, 1992.
[24] A.S. Elnashai, A.Y. Elghazouli, F.A. Denesh-Ashtiani, Response ofsemi-rigid steel frames to cyclic and earthquake loads, J Struct. Engrg.124 (1998) 857–867.
[25] C. Faella, V. Piluso, G. Rizzano, Structural Steel Semi-rigidConnections – Theory, Design and Software, CRC Press LLC, 2000.
[26] T.W. Stelmack, M.J. Marley, K.H. Gerstle, Analysis and tests offlexibly connected steel frames, J Struct. Engrg. ASCE 112 (1986)1573–1588.
[27] K. Takanashi, A.S. Elnashai, K. Ohi, A.Y. Elghazouli, Experi-mental Behavior of Steel and Composite Frames under Cyclic andDynamic Loading, University of Tokyo and Imperial College,1992.





























