Embed Size (px)
Citation preview

Seismic inversion and imaging viamodel order reduction
Alexander V. Mamonov1,Liliana Borcea2, Vladimir Druskin3,
Andrew Thaler4 and Mikhail Zaslavsky3
1University of Houston,2University of Michigan Ann Arbor,
3Schlumberger-Doll Research Center,4The Mathworks, Inc.
A.V. Mamonov ROMs for inversion and imaging 1 / 31

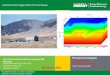
Motivation: seismic oil and gas exploration
Problems addressed:1 Inversion: quantitative
velocity estimation, FWI
2 Imaging: qualitative ontop of velocity model
3 Data preprocessing:multiple suppression
Common framework:Reduced Order Models(ROM)
A.V. Mamonov ROMs for inversion and imaging 2 / 31

Forward model: acoustic wave equation
Acoustic wave equation in the time domain
utt = Au in Ω, t ∈ [0,T ]
with initial conditions
u|t=0 = B, ut |t=0 = 0,
sources are columns of B ∈ RN×m
The spatial operator A ∈ RN×N is a (symmetrized) fine griddiscretization of
A = c2∆
with appropriate boundary conditionsWavefields for all sources are columns of
u(t) = cos(t√−A)B ∈ RN×m
A.V. Mamonov ROMs for inversion and imaging 3 / 31

Data model and problem formulations
For simplicity assume that sources and receivers are collocated,receiver matrix is also BThe data model is
D(t) = BT u(t) = BT cos(t√−A)B,
an m ×m matrix function of time
Problem formulations:1 Inversion: given D(t) estimate c2 Imaging: given D(t) and a smooth kinematic velocity model c0,
estimate “reflectors”, discontinuities of c3 Data preprocessing: given D(t) obtain F(t) with multiple
reflection events suppressed/removed
A.V. Mamonov ROMs for inversion and imaging 4 / 31

Reduced order models
Data is always discretely sampled, say uniformly at tk = kτThe choice of τ is very important, optimally τ around Nyquist rateDiscrete data samples are
Dk = D(kτ) = BT cos(
kτ√−A)
B = BT Tk (P)B,
where Tk is Chebyshev polynomial and the propagator is
P = cos(τ√−A)∈ RN×N
A reduced order model (ROM) P, B should fit the data
Dk = BT Tk (P)B = BT Tk (P)B, k = 0,1, . . . ,2n − 1
A.V. Mamonov ROMs for inversion and imaging 5 / 31

Projection ROMs
Projection ROMs are of the form
P = VT PV, B = VT B,
where V is an orthonormal basis for some subspaceWhat subspace to project on to fit the data?Consider a matrix of wavefield snapshots
U = [u0,u1, . . . ,un−1] ∈ RN×nm, uk = u(kτ) = Tk (P)B
We must project on Krylov subspace
Kn(P,B) = colspan[B,PB, . . . ,Pn−1B] = colspan U
The data only knows about what P does to wavefieldsnapshots uk
A.V. Mamonov ROMs for inversion and imaging 6 / 31

ROM from measured data
Wavefields in the whole domain U are unknown, thus V isunknownHow to obtain ROM from just the data Dk?Data does not give us U, but it gives us inner products!Multiplicative property of Chebyshev polynomials
Ti(x)Tj(x) =12
(Ti+j(x) + T|i−j|(x))
Since uk = Tk (P)B and Dk = BT Tk (P)B we get
(UT U)i,j = uTi uj =
12
(Di+j + Di−j),
(UT PU)i,j = uTi Puj =
14
(Dj+i+1 + Dj−i+1 + Dj+i−1 + Dj−i−1)
A.V. Mamonov ROMs for inversion and imaging 7 / 31

ROM from measured data
Suppose U is orthogonalized by a block QR (Gram-Schmidt)procedure
U = VLT , equivalently V = UL−T ,
where L is a block Cholesky factor of the Gramian UT U knownfrom the data
UT U = LLT
The projection is given by
P = VT PV = L−1(
UT PU)
L−T ,
where UT PU is also known from the dataCholesky factorization is essential, (block) lower triangularstructure is the linear algebraic equivalent of causality
A.V. Mamonov ROMs for inversion and imaging 8 / 31

Problem 1: Inversion (FWI)
Conventional FWI (OLS)
minimizec
‖D? − D( · ; c)‖22
Replace the objective with a “nonlinearly preconditioned”functional
minimizec
‖P? − P(c)‖2F ,
where P? is computed from the data D? and P(c) is a (highly)nonlinear mapping
P : c → A(c)→ U→ V→ P
Similar approach to diffusive inversion (parabolic PDE, CSEM)converges in one Gauss-Newton iteration
A.V. Mamonov ROMs for inversion and imaging 9 / 31

Conventional vs. ROM-preconditioned FWI in 1D
Conventional ROM-preconditioned
0 0.5 1 1.5 2 2.5 3
0.5
1
1.5
2
CG iteration 1, Er = 0.278869
CGtrue
0 0.5 1 1.5 2 2.5 3
0.5
1
1.5
2
CG iteration 1, Er = 0.272127
CGtrue
Automatic removal of multiple reflections.
A.V. Mamonov ROMs for inversion and imaging 10 / 31

Conventional vs. ROM-preconditioned FWI in 1D
Conventional ROM-preconditioned
0 0.5 1 1.5 2 2.5 3
0.5
1
1.5
2
CG iteration 5, Er = 0.265722
CGtrue
0 0.5 1 1.5 2 2.5 3
0.5
1
1.5
2
CG iteration 5, Er = 0.197026
CGtrue
Automatic removal of multiple reflections.
A.V. Mamonov ROMs for inversion and imaging 11 / 31

Conventional vs. ROM-preconditioned FWI in 1D
Conventional ROM-preconditioned
0 0.5 1 1.5 2 2.5 3
0.5
1
1.5
2
CG iteration 10, Er = 0.273922
CGtrue
0 0.5 1 1.5 2 2.5 3
0.5
1
1.5
2
CG iteration 10, Er = 0.157774
CGtrue
Automatic removal of multiple reflections.
A.V. Mamonov ROMs for inversion and imaging 12 / 31

Conventional vs. ROM-preconditioned FWI in 1D
Conventional ROM-preconditioned
0 0.5 1 1.5 2 2.5 3
0.5
1
1.5
2
CG iteration 15, Er = 0.268569
CGtrue
0 0.5 1 1.5 2 2.5 3
0.5
1
1.5
2
CG iteration 15, Er = 0.138945
CGtrue
Automatic removal of multiple reflections.
A.V. Mamonov ROMs for inversion and imaging 13 / 31

Conventional vs. ROM-preconditioned FWI in 1D
Conventional ROM-preconditioned
0 0.5 1 1.5 2 2.5 30.2
0.4
0.6
0.8
1
1.2
1.4
1.6
CG iteration 1, Er = 0.173770
CGtrue
0 0.5 1 1.5 2 2.5 30.2
0.4
0.6
0.8
1
1.2
1.4
1.6
CG iteration 1, Er = 0.147049
CGtrue
Avoiding the cycle skipping.
A.V. Mamonov ROMs for inversion and imaging 14 / 31

Conventional vs. ROM-preconditioned FWI in 1D
Conventional ROM-preconditioned
0 0.5 1 1.5 2 2.5 30.2
0.4
0.6
0.8
1
1.2
1.4
1.6
CG iteration 5, Er = 0.174695
CGtrue
0 0.5 1 1.5 2 2.5 30.2
0.4
0.6
0.8
1
1.2
1.4
1.6
CG iteration 5, Er = 0.105966
CGtrue
Avoiding the cycle skipping.
A.V. Mamonov ROMs for inversion and imaging 15 / 31

Conventional vs. ROM-preconditioned FWI in 1D
Conventional ROM-preconditioned
0 0.5 1 1.5 2 2.5 30.2
0.4
0.6
0.8
1
1.2
1.4
1.6
CG iteration 10, Er = 0.174688
CGtrue
0 0.5 1 1.5 2 2.5 30.2
0.4
0.6
0.8
1
1.2
1.4
1.6
CG iteration 10, Er = 0.095547
CGtrue
Avoiding the cycle skipping.
A.V. Mamonov ROMs for inversion and imaging 16 / 31

Conventional vs. ROM-preconditioned FWI in 1D
Conventional ROM-preconditioned
0 0.5 1 1.5 2 2.5 30.2
0.4
0.6
0.8
1
1.2
1.4
1.6
CG iteration 15, Er = 0.174689
CGtrue
0 0.5 1 1.5 2 2.5 30.2
0.4
0.6
0.8
1
1.2
1.4
1.6
CG iteration 15, Er = 0.086519
CGtrue
Avoiding the cycle skipping.
A.V. Mamonov ROMs for inversion and imaging 17 / 31

Problem 2: Imaging
ROM is a projection, we can use backprojection
If span(U) is suffiently rich, then columns of VVT should be goodapproximations of δ-functions, hence
P ≈ VVT PVVT = VPVT
Problem: U and V are unknown
We have a rough idea of kinematics, i.e. the travel times
Equivalent to knowing a smooth kinematic velocity model c0
For known c0 we can compute
U0, V0, P0
A.V. Mamonov ROMs for inversion and imaging 18 / 31

Backprojection imaging functional
Take backprojection P ≈ VPVT and make another approximation:replace unknown V with V0
P ≈ V0PVT0
For the kinematic model we know V0 exactly
P0 ≈ V0P0VT0
Take the diagonals of backprojections to extract approximateGreen’s functions
G( · , · , τ)−G0( · , · , τ) = diag(P−P0) ≈ diag(
V0(P− P0)VT0
)= I
Approximation quality depends only on how well columns ofVVT
0 and V0VT0 approximate δ-functions
A.V. Mamonov ROMs for inversion and imaging 19 / 31

Simple example: layered modelTrue sound speed c Backprojection: c0 + αI
RTM imageA simple layered model, p = 32sources/receivers (black ×)Constant velocity kinematicmodel c0 = 1500 m/sMultiple reflections from wavesbouncing between layers andsurfaceEach multiple creates an RTMartifact below actual layersA.V. Mamonov ROMs for inversion and imaging 20 / 31

Snapshot orthogonalizationSnapshots U Orthogonalized snapshots V
t = 10τ
t = 15τ
t = 20τ
A.V. Mamonov ROMs for inversion and imaging 21 / 31

Snapshot orthogonalizationSnapshots U Orthogonalized snapshots V
t = 25τ
t = 30τ
t = 35τ
A.V. Mamonov ROMs for inversion and imaging 22 / 31

Approximation of δ-functionsColumns of V0VT
0 Columns of VVT0
y = 345 m
y = 510 m
y = 675 m
A.V. Mamonov ROMs for inversion and imaging 23 / 31

Approximation of δ-functionsColumns of V0VT
0 Columns of VVT0
y = 840 m
y = 1020 m
y = 1185 m
A.V. Mamonov ROMs for inversion and imaging 24 / 31

High contrast example: hydraulic fracturesTrue c Backprojection image I
Important application: hydraulic fracturing
Three fractures 10 cm wide each
Very high contrasts: c = 4500 m/s in the surrounding rock,c = 1500 m/s in the fluid inside fractures
A.V. Mamonov ROMs for inversion and imaging 25 / 31

High contrast example: hydraulic fracturesTrue c RTM image
Important application: hydraulic fracturing
Three fractures 10 cm wide each
Very high contrasts: c = 4500 m/s in the surrounding rock,c = 1500 m/s in the fluid inside fractures
A.V. Mamonov ROMs for inversion and imaging 26 / 31

Backprojection imaging: Marmousi model
A.V. Mamonov ROMs for inversion and imaging 27 / 31

Problem 3: Data preprocessing
Use multiple-suppression properties of ROM to preprocess dataCompute P from D and P0 from D0 corresponding to c0
Propagator perturbation
Pε = P0 + ε(P− P0)
Propagate the perturbation
Dε,k = BT Tk (Pε)B
Generate filtered data
Fk = D0,k +dDε,k
dε
∣∣∣∣ε=0
Can show that Fk corresponds to data that a Born forwardmodel will generate
A.V. Mamonov ROMs for inversion and imaging 28 / 31

Example: seismogram comparison
Three direct arrivals +three multiplesDirect arrival from smallscatterer masked by thefirst multiple
Dk − D0,k Fk − D0,k
A.V. Mamonov ROMs for inversion and imaging 29 / 31

Conclusions and future work
ROMs for inversion, imaging, data preprocessingTime domain formulation is essential, linear algebraic analoguesof causality: Gram-Schmidt, CholeskyImplicit orthogonalization of wavefield snapshots: suppressionof multiples in backprojection imaging and data preprocessingAccelerated convergence, alleviated cycle-skipping inROM-preconditioned FWI
Future work:Non-symmetric ROM for non-collocated sources/receiversNoise effects and stabilityROM-preconditioned FWI in 2D/3D
A.V. Mamonov ROMs for inversion and imaging 30 / 31

References
1 Nonlinear seismic imaging via reduced order modelbackprojection, A.V. Mamonov, V. Druskin, M. Zaslavsky, SEGTechnical Program Expanded Abstracts 2015: pp. 4375–4379.
2 Direct, nonlinear inversion algorithm for hyperbolic problems viaprojection-based model reduction, V. Druskin, A. Mamonov, A.E.Thaler and M. Zaslavsky, SIAM Journal on Imaging Sciences9(2):684–747, 2016.
3 A nonlinear method for imaging with acoustic waves via reducedorder model backprojection, V. Druskin, A.V. Mamonov,M. Zaslavsky, 2017, arXiv:1704.06974 [math.NA]
4 Untangling nonlinearity in inverse scattering with data-drivenreduced order models, L. Borcea, V. Druskin, A.V. Mamonov,M. Zaslavsky, 2017, arXiv:1704.08375 [math.NA]
A.V. Mamonov ROMs for inversion and imaging 31 / 31