Embed Size (px)
Citation preview
a
Technovision-2014: 1st International Conference at SITS, Narhe, Pune on April 5-6, 2014
All copyrights Reserved by Technovision-2014, Department of Electronics and Telecommunication Engineering,Sinhgad Institute of Technology and Science, Narhe, PunePublished by IJECCE (www.ijecce.org) 439
International Journal of Electronics Communication and Computer EngineeringVolume 5, Issue (4) July, Technovision-2014, ISSN 2249–071X
Secure Navigation of Missile using RC4 AlgorithmKalyani Vidyashree
Department of Electronic and Telecommunication Engineering,Singhad Institute of Technology and Science, University of Pune
Email; [email protected]
Malwadkar GauriDepartment of Electronic and Telecommunication Engineering,
Singhad Institute of Technology and Science, University of PuneEmail: [email protected]
Nayakude SmitaDepartment of Electronic and Telecommunication Engineering,
Singhad Institute of Technology and Science, University of PuneEmail: [email protected]
Prof. Suvarna KulkarniDepartment of Electronic and Telecommunication Engineering,
Singhad Institute of Technology and Science, University of PuneEmail: [email protected]
Abstract – As society advances with new technologicaldevelopments, specifically robotics, more innovations areintended for military purposes. This Interactive QualifyingProject investigates the current and predicted impact ofrobots on select military operations. The project focuses onfour categories of military operations: surveillance,reconnaissance, automated defense, and missile launching.The goals of this project are to demonstrate how robots doand may affect military operations as well as to speculateabout the future development of such robots. The projectachieves the goals first by sensing the foreign object, sendingencrypted data to it, and then making the decision aboutmissile launching by receiving the decrypted message. First,the project provides a brief history of robots. Second,describes technologies available for the select militaryoperations and their current limitations. The projectdescribes the short-term and long-term impacts of the use ofrobots by the military. Now a day's terrorism is spreading allover the world. Our neighboring countries are prepared withmore and more advanced weapons. So we have to face thewar anytime. In our project the important decision of missilelaunching is taken by our intelligent robot itself, no humaninterpretation is required.
Keywords – Secure Navigation, RC4 Algorithm, InteractiveQualifying Project.
I. INTRODUCTION
In today’s world enemy warfare is an important factor ofany nation’s security. The national security mainlydepends on army, navy, air-force. The important and vitalrole is played by the army’s artillery such as scud missile,boforce guns etc. The main objective is to send thecoordinates of target to the gun. Here we are sending 2types of co-ordinate. One is the longitude and the latitudeof missile and secondly the x & y co-ordinates of missile.
In our project we have come up with an idea ofdetecting the incoming plane whether it is enemy orfriendly with the help of higher encryption and decryptionroutine using wireless RF protocol. Guidance systems aredivided into different categories according to what type oftarget they are designed for - either fixed targets ormoving targets. The weapons can be divided into twobroad categories, Go-Onto-Target (GOT) and Go-Onto-Location-in-Space (GOLIS) guidance systems. A GOT
missile can target either a moving or fixed target, whereasa GOLIS weapon is limited to a stationary or near-stationary target. The trajectory that a missile takes whileattacking a moving target is dependent upon themovement of the target. Also, a moving target can animmediate threat to the sender of the missile. The targetneeds to be eliminated in a timely fashion in order topreserve the integrity of the sender. In GOLIS systems theproblem is simpler because the target is not moving.
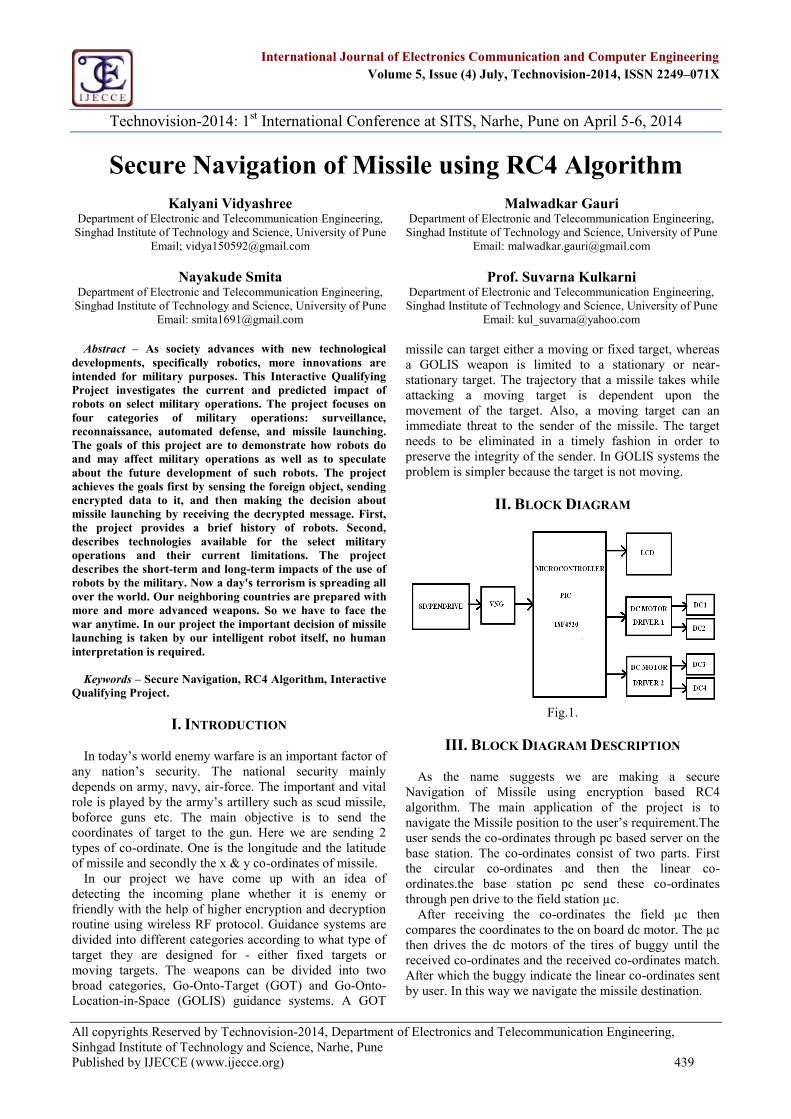
II. BLOCK DIAGRAM
Fig.1.
III. BLOCK DIAGRAM DESCRIPTION
As the name suggests we are making a secureNavigation of Missile using encryption based RC4algorithm. The main application of the project is tonavigate the Missile position to the user’s requirement.Theuser sends the co-ordinates through pc based server on thebase station. The co-ordinates consist of two parts. Firstthe circular co-ordinates and then the linear co-ordinates.the base station pc send these co-ordinatesthrough pen drive to the field station µc.
After receiving the co-ordinates the field µc thencompares the coordinates to the on board dc motor. The µcthen drives the dc motors of the tires of buggy until thereceived co-ordinates and the received co-ordinates match.After which the buggy indicate the linear co-ordinates sentby user. In this way we navigate the missile destination.
a
Technovision-2014: 1st International Conference at SITS, Narhe, Pune on April 5-6, 2014
All copyrights Reserved by Technovision-2014, Department of Electronics and Telecommunication Engineering,Sinhgad Institute of Technology and Science, Narhe, PunePublished by IJECCE (www.ijecce.org) 440
International Journal of Electronics Communication and Computer EngineeringVolume 5, Issue (4) July, Technovision-2014, ISSN 2249–071X
Using specialized software we will first connect theserver PC. Once the connection is established we will beable to monitor and control the missile.
After the connection has been made the user first has toenter the Password. Then the user can enter the co-ordinate of Missile Navigation. After enter the X and Yco-ordinates the user can send the codes to the Missileunit.
IV. RC4 ALGORITHM
Ronald Rivest of RSA developed the RC4 algorithm,which is a shared key stream cipher algorithm requiring asecure exchange of a shared key. The algorithm is usedidentically for encryption and decryption as the datastream is simply XORed with the generated key sequence.The algorithm is serial as it requires successive exchangesof state entries based on the key sequence. Henceimplementations can be very computationally intensive.This algorithm has been released to the public and isimplemented by many programmers. This encryptionalgorithm is used by standards such as IEEE 802.11 withinWEP (Wireless Encryption Protocol) using a 40 and 128-bit keys. Published procedures exist for cracking thesecurity measures as implemented in WEP.
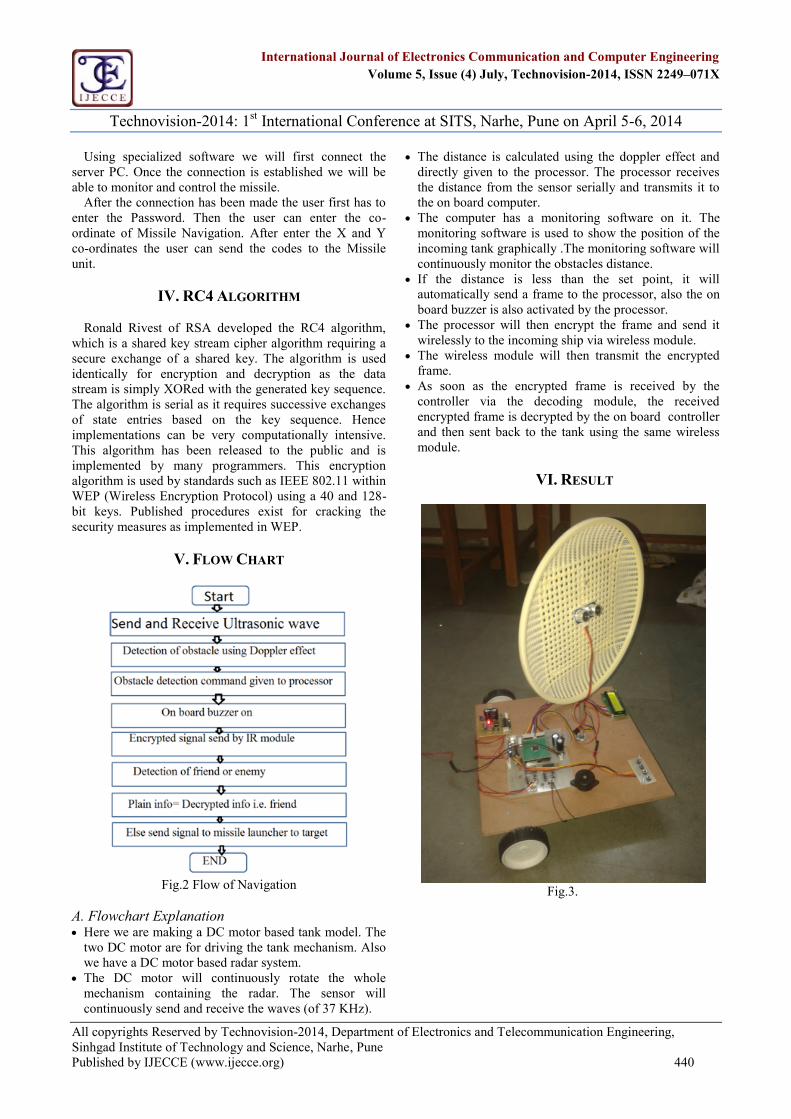
V. FLOW CHART
Fig.2 Flow of Navigation
A. Flowchart Explanation Here we are making a DC motor based tank model. The
two DC motor are for driving the tank mechanism. Alsowe have a DC motor based radar system.
The DC motor will continuously rotate the wholemechanism containing the radar. The sensor willcontinuously send and receive the waves (of 37 KHz).
The distance is calculated using the doppler effect anddirectly given to the processor. The processor receivesthe distance from the sensor serially and transmits it tothe on board computer.
The computer has a monitoring software on it. Themonitoring software is used to show the position of theincoming tank graphically .The monitoring software willcontinuously monitor the obstacles distance.
If the distance is less than the set point, it willautomatically send a frame to the processor, also the onboard buzzer is also activated by the processor.
The processor will then encrypt the frame and send itwirelessly to the incoming ship via wireless module.
The wireless module will then transmit the encryptedframe.
As soon as the encrypted frame is received by thecontroller via the decoding module, the receivedencrypted frame is decrypted by the on board controllerand then sent back to the tank using the same wirelessmodule.
VI. RESULT
Fig.3.
a
Technovision-2014: 1st International Conference at SITS, Narhe, Pune on April 5-6, 2014
All copyrights Reserved by Technovision-2014, Department of Electronics and Telecommunication Engineering,Sinhgad Institute of Technology and Science, Narhe, PunePublished by IJECCE (www.ijecce.org) 441
International Journal of Electronics Communication and Computer EngineeringVolume 5, Issue (4) July, Technovision-2014, ISSN 2249–071X
Fig.4.
REFERENCES
[1] Efficient Implementation for MD5-RC4 Encryption Using GPUwith CUDA"; Published in: Anti-counterfeiting, Security, andIdentification in Communication, 2009. ASID 2009. 3rdInternational Conference on, Date of Conference: 20-22 Aug.2009,(pp.167 - 170)
[2] 2)Manavski, S. A., “CUDA compatible GPU as an efficienthardware accelerator for AES cryptography”, Proc. IEEEInternational Conference on Signal Processing andCommunication, (pp. 65-68),2007.
[3] 3)Chun Yuan, Yuzhou Zhong, and Yuwen He, “Chaos BasedEncryption Algorithm for Compressed Video,” Chinese Journalof Conputers, Vol.27 No.2, Feb 2004, pp.257-263.
[4] High-Performance Hardware Implementation for RC4 StreamCipher"; Published in:Computers, IEEE Transactionson (Volume:62), Date of Publication: April 2013,pp(730 -743)Date of Publication :17 January 2012Sponsored by :IEEEComputer Society
[5] Group Key Update Method for Improving RC4 Stream Cipher inWireless Sensor Networks";Chuan-Chin Pu ; Wan-YoungChung Convergence Information Technology, 2007.International Conference on Digital Object Identifier:10.1109/ICCIT.2007.277. Publication Year: 2007 , Page(s):1366 - 1371
[6] 6)"An improved RC4 stream cipher";Jian Xie ; XiaozhongPan Computer Application and System Modeling (ICCASM),2010 International Conference on Volume: 7, Digital ObjectIdentifier: 10.1109/ICCASM.2010.5620800 Publication Year:2010 , Page(s): V7-156 - V7-159
[7] ARM Realization of Storage Device Encryption Based on Chaosand AES Algorithm 2011 Fourth International Workshop onChaos-Fractals Theories and Applications.




























