Embed Size (px)
Citation preview

Planetary Cartography / Cartographie planétaire
13 IndexContents / Matières Session / Séance Authors / Auteurs
Section 13
Planetary CartographyCartographie planétaire
Planetary Cartography in the New MillenniumKira B. Shingareva and Bianna V. Krasnopevtseva, James R. Zimbelman
Multilingual Mars Map – First in a New Series of Planetary MapsManfred F. Buchroithner
Mathematical planetary cartography basis for non-spherical celestial bodiesMaxim V. Nyrtsov - travel award winner, Lev M. Bugaevsky, Kira B. Shingareva
The Mars Pathfinder Landing Site – A Topographic Image Map 1 : 200 000Hartmut Lehmann, Jörg Albertz, Marita Wählisch, Wolfgang Zeitler, Gerhard Neukum
Planetary Mapping Activitiesand Plans of the National Aeronautics and Space Administration (NASA)James R. Zimbelman, Kenneth L. Tanaka

Planetary Cartography / Cartographie planétaire
13 Index
Session / Séance 04-A
Planetary Cartography in the New Millennium
Kira B. Shingareva and Bianna V. KrasnopevtsevaMoscow State University for Geodesy and Cartography103064 Moscow, Gorokhovsky per. 4, [email protected]
James R. ZimbelmanCenter for Earth and Planetary StudiesNational Air and Space MuseumSmithsonian InstitutionWashington, D.C. 20560-0315 [email protected]
The history of mapping celestial bodies is divided into 3 stages, each of which have their own subdivisions.The collection of tasks to be addressed by planetary cartography is described here. The specificity of mapproduct development is outlined, including the mathematical basis for mapping, coordinate systems, choice ofprojections, etc. The future perspectives of planetary cartography development are considered relative to theco-existence of traditional and digital planetary mapping techniques.
Maps of celestial bodies are defined by the peculiarities of their surfaces. Specific parameters such as surfacerelief and physical properties vary for each celestial body, as do the methods and instruments used in theexploration of each object. These factors play major roles in the development of Solar System cartographicconcepts.
Three stages are identified in the history of mapping celestial bodies: ground-based data, early space-baseddata, and advanced space-based data. The ground-based stage was characterized by visual observations anddrawings, supplemented by telescopic photography, but without the availability of information obtained fromspacecraft. The early space-based stage includes both telescopic observations and imaging data obtained fromvarious space missions. This stage represents the initial efforts of using space information in planetary map-ping. During the advanced space-based stage, intensive surveying and mapping of the terrestrial planets andtheir moons will be conducted, followed by systematic studies of the moons of the gas giant planets, comets,and asteroids. This effort involves the transition from global-scale maps to surveys at regional and local scales,which typically require polar-orbiting spacecraft to provide complete coverage of the target body.
The exploration of space also can be characterized by three stages. The main goal of the first stage was tobegin exploration of all of the various objects within the Solar System. As a result, we obtained many local orregional maps and charts of celestial bodies at various scales, but often without full global coverage. Today wehave begun the second stage of exploration through systematic mapping of planets (e.g., Mars and Venus) andtheir moons (e.g., Earth’s Moon and the Galilean satellites of Jupiter). In the new Millennium, the third stageof exploration will include many aspects of cartographic support for the utilization of extraterrestrial areas(e.g., Lunar or Martian bases).

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
The collection of tasks to be addressed by planetary cartography significantly increases in the New Millen-nium. First of all, we should consider the tasks connected with the increased number of trends available forstudy in the coming years, together with the specific uses of thematic maps. Along with studying the featuresof the surface morphology, the use of maps will increase significantly through the use of specialized maps ofsurface physical properties, geophysical and geomorphologic maps, geochemical maps, and maps of specialapplications. Study of the spatial distribution of phenomena on the surface of a celestial body helps specify thecorrelation between groups of related phenomena. The analysis reveals the correlation between the surfacestructure and the internal structure of the celestial body. The basic maps used for this make possible to locatethe specific information relative to the surface relief. Simultaneously, in recent years a surface simulation hasbeen developed on the basis of statistical analyses of the random distribution of relief features. The applicationgoal of the maps of celestial bodies is usually attributed to the support of space mission. In the field of missionnavigation, support of the following applications can be identified: Direct support of missions to celestialbodies, support of landings on these bodies, and support of programs for conducting experiments both on thesurface and from orbit. IN connection with the preparation of Lunar or Martian bases, the support of appliedwork on the lunar surface includes construction engineering, transportation network development, and indus-trial construction engineering. In addition, in is important to recognize the growing need for the creation ofvarious cartographic products for educational use, public inquiry, and presentations to general audiences; thesemust be included among the primary goals for mapping celestial bodies.
It is important to underscore that planetary cartography will involve the co-existence of both traditional anddigital mapping techniques. Consequently, study of the following aspects will be of particular importance forthe future of planetary cartography: thorough choice and development of the map products available, identifi-cation of the parameters needed for various maps (e.g., mathematical basis, coordinates systems, projection,terminology, etc.), and standardization of international maps.
When mapping celestial bodies, the development of a mathematical basis for cartographic products plays animportant role. As a general rule, the center of the reference ellipsoid is assumed to coincide with the center ofmass of the planet or moon, and the polar axis corresponds with the axis of rotation. During the first twoperiods of mapping celestial bodies, a spherical shape was usually the only assumed shape for the body. Withthe appearance of new data, which allows us to revise the shape and dimensions of many Solar System bodies,an ellipsoid of rotation with small polar oblateness (e.g., Mars) came into common use as the reference surface.Then, for the first time, the triaxial ellipsoid was applied to Phobos, one of two irregularly shaped moons ofMars. For Earth’s Moon, a sphere can be considered as a first approximation to the reference surface. Study ofthe character of the equipotential surfaces near the lunar surface (e.g., the shape of the lunar geoid) has re-vealed certain reasons for using the triaxial ellipsoid as the next approximation. However, the choice of theappropriate reference surface will be most significant for bodies of irregular shape, such as the small moons ofthe giant planets, various asteroids, and comet nuclei.
The choice of projections for the maps of celestial bodies is a complex task since it is necessary to take intoaccount several factors connected with the specific features of each celestial body. Among these, we shouldconsider the specificity of their shape for small-scale mapping and the necessity to determine the optimalprojections for specific regions as the top priorities for future research.
In the future, is seems expedient to create atlases of planetary research to foster the study of comparativeplanetology. These atlases must have basic reference data presented in an encyclopedic fashion. A systematicand detailed approach should form the basis for any atlas that maps celestial bodies in either traditional ordigital forms. Three main trends connected with the continuity of the stages of understanding Solar Systembodies include:
• creation of atlases consisting of original images for the surfaces of the celestial bodies, the same imagesimproved through computer processing, and the images with superposed map grids (1st type);

Planetary Cartography / Cartographie planétaire
13 Index
• creation (as the data become available) of more complex atlases for certain celestial bodies representing theentire scope of our knowledge about these bodies (2nd type);
• creation of detailed atlases for groups of celestial bodies (e.g., the terrestrial planets and their moons, themoons of the gas giant planets, asteroids, etc.). This will allow one to analyze the data by taking a compara-tive planetology approach.
It is important to underscore that planetary cartography will involve the co-existence of both traditional anddigital mapping techniques. Consequently, study of the following aspects will be of particular importance forthe future of planetary cartography: thorough choice and development of the map products available, identifi-cation of the parameters needed for various maps (e.g., mathematical bases, co-ordinate systems, projectionsproducts, terminology etc.), and standardization of international map.

Planetary Cartography / Cartographie planétaire
13 Index
Session / Séance 04-C
Multilingual Mars Map – First in a New Series of Planetary Maps
Manfred F. BuchroithnerInstitute for CartographyDresden University of TechnologyD-01062 [email protected]
Abstract
Particulars and production history of a 1:25 000 000 colour Mars map are described. It is based on a detailedmanually made relief shading. The backside displays a set of collateral information about the Red Planet infive languages. Produced under the auspicies of the ICA Working Group on Planetary Cartography, this maprepresents the first in a series of envisaged planetary maps and an example of international cartographiccooperation between the Moscow State University for Geodesy and Cartography (MIIGAiK) and the DresdenUniversity of Technology (TUD), Germany.
1. Introduction
Not only after the successful Mars Pathfinder Mission in 1997 and recent (March 1999) reports about possibletraces of life on Mars the public interest in the planets of our solar system has significantly increased. Withinthe last few years it has become quite evident that in the future more planetary lander and surrounder missionswill be carried out. On the other hand, the average knowledge about the atmospheres, shapes and reliefs of theplanets is still rather meagre.
In order to supply the interested public as well as experts with information about the „geography“, in particularthe relief, of planets a new series of relief maps has been launched with the publication of a Mars map.
The display of an „Uncorrected Preprint“ of this map at a scale of 1:35 000 000 within the scope of the nationalmap exhibition at the 1997 ICA Conference in Stockholm served as a test wheter the international interest insuch a map would be sufficient. The overwhelmingly positive response encouraged us to proceed with theproduction of a map of higher quality.
The preprint had a format of 77 cm x 57.5 cm, the two hemispheres having a diameter of 27.5 cm. In additionto the map proper, collateral information in five languages was also printed around the two Mars halves. Thecolour was a bright red, with all the lettering in black.
2. Production Basis
Since the main goal of the envisaged Mars map was the high-accuracy depiction of its overall relief, we werelooking for an adequate representation. In this situation the longstanding good relations between the Institutefor Cartography of the Dresden University of Technology (TUD) and the Moscow State University of Geodesyand Cartography (MIIGAiK) turned out to be quite benficial. The availability of a pencil-made manual hill-shading at MIIGAiK made us decide to favour a „classical“ relief representation. The original had a scale of

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
1:25 000 000 and was based on the „Shaded Relief Map of the Eastern, Western and Polar Regions of Mars“ ata scale of 1:15 000 000 from 1985, the Mars publication by H. Wolf (1984) as well as findings from imagesacquired by various Mars sondes (cf. Section 3: information on imaging Mars sondes and other basic data). Itsimulates West illumination with an elevation angle equal/smaller 40°. So far, this pencil drawing on filmseems to be the most impressive depiction of geomorphological features of the whole planet: volcanic cones,table mountains (mesas), grabens etc. are perceivable quite clearly. Thus one can obtain a good impression ofrelief details of the Mars planet and, hence, simultanously get an idea of its physiognomy as a whole. Theoverall quality, richness in detail and original size of the shading suggest final map scale of 1:25 000 000.
3. Map Production
Based on the decision about the final map scale, which resulted in a diameter of the two hemispheres of 38.4cm, a first general map layout has been made. Soon it became clear that it would be advisable to print all thecollateral information (cf. Section 2: preprint) not on the frontside but rather put it into text blocks in the back.
For the production process conventional reprographic methods were applied, using a repro screen of 54 points/cm for the relief shading original. A few attempts were made in order to optimise the reproduction of the reliefrepresentation, in particular to balance between the bright tones of the vastitates (wide plains) and the darkpatches of the shady East-exposed slopes of volcanoes and grabens.
The coordinate grid of the map whose geometry is based on the Transversal Equivalent Azimuth Projection ofLambert shows every twentieth parallel and meridian.
The lettering is kept in black and displays different fonts: for craters 7 point Arial, capital letters; for mountainranges 7 point Arial, italic, capital letters; for plains 7 point Arial, wide spacing, capital letters; for landing sites7 point, Arial. Thus it gives explanations on all known and named geographic features. The type of letteringallows to deduce the geomorphological categories.
Below the title „Mars“, between the two hemispheres, one finds the astronomical/astrological symbol for thisplanet.
For the printing three colours have been used. All letterings have been printed in black. The background of thewhole map is kept in „night-blue“, representing the darkness of the outer space and using special printing ink.A special ink has also been used to give the Mars surface a warm golden-orange red. The reddish hue may beconsidered to stand for the „Red Planet“, the warm touch of it makes the whole map more pleasant to look at.
The paper format of the map is 55 cm x 84 cm, the format of the printed area being 47 cm x 78 cm whichcorresponds to the hemisphere diameter. The printed area in the back amounts to 43 cm x 81.5 cm. This is thesize of a frame which contains explanatory texts about the map and the planet.
The backside comprehends collateral information about map designer, printer, editor, cartographers and con-sultants. Figure 1 gives all these details.
Publisher: Institute for Cartography, Dresden University of Technology, Germany.Map Design and Printing: Institute for Cartography, Dresden University of Technology.Map Editor: M.F. Buchroithner.Cartographers: R. Franke, R. Päßler, R. Stanke, M. Tusche, U. Heidig.Map Consultants: B.V. Krasnopevtseva, K.B. Shingareva; Moscow State University forGeodesy and Cartography (MIIGAiK).
Transversal Equivalent Azimuthal Projection of Lambert.
Figure 1. Collateral information about the Mars map.

Planetary Cartography / Cartographie planétaire
13 Index
Moreover, the back displays geophysical infor-mation about the Mars like density, radius, vol-ume, albedo, orbit inclination, rotation period,and many more (Figure 2).
Besides a list of imaging Mars sondes (Figure3), a complete glossary of „Mars-morphologi-cal“ terms like catera, patera or vastitas (Figure4) completes the backside information.
All this information is (from left to right) givenin English, German, French, Spanish and Rus-sian (in cyrillic letters), each text block beingprinted in a light-grey, screened, elongate boxof 14.6 cm x 39.8 cm.
The first edition of the multilingual Mars mapamounts to 300 copies. Depending on the de-mand further print series will be produced.
4. Concluding Remarks
With all its features like easy-to-perceive reliefrepresentation, complete landing sites, glossaryof morphological terms, and its five-languagemultilingualism the described Mars map isunique world-wide. The next in the envisagedseries of planetary map will be a Moon map,which will also be produced in close co-opera-tion with MIIGAiK.
The international sales and distribution are car-ried out by the Institute for Cartography of theDresden University of Technology .
Data on Mars:Mass: 6.4185 x 1026 g.Density: 3.9335 g cm-3.
Reference Datum: three-axial ellipsoid.Equatorial Radius:A: 3 397.2 km; B: 3 393.3 km; polar C: 3 376.3 km.Surface: 14.420 x 107 km2.
Volume: 16.291 x 1010 km3.
Gravitational Acceleration:at the Equator: 3.711 ms-2; at the Pole: 3.758 ms-2.
Axial Inclination: 23.98°.Orbit Inclination: 1.8504°.
Average Orbital Speed: 24.1 kms-1.Orbital Period: 686.980 days.Synodic Orbital Period: 779.94 days.Rotation Period: 24 h 37 min 22.66 s.
Average Surface Temperature: -23°C.Albedo: 0.16.Maximum Brigthness: -2.8 mag.
Figure 2. Geophysical background information about Mars.
Mars Sondes:(having imaged Mars)
1965 Mariner 4: 21 images (USA).1969 Mariner 6: 76 images (USA).1969 Mariner 7: 126 images (USA).1971 Mariner 9: 7 329 images (USA).1974 Mars 4 and 5: more than 100 images (USSR).1976 Viking 1 and 2: more than 60 000 images (USA).1989 Phobos 2: more than 30 images (USSR).1997 Pathfinder: more than 16 500 images (USA).
Figure 3. Imaging Mars sondes.

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
Relief Forms:Catena: crater chain; a line or chain of craters.Cavi: deep and steep depressions.Chasma: very big linear fracture.Colles: hills.Crater: round depression.Dorsum: elongate hill, mountain ridge.Fossa: graben, long, flat and narrow depression.Labyrinthus: complicated network of small canyons.Mensa: table mountain, small plateau or mountain plain.Mons: mountain, volcano.Montes: mountain range or mountain massif.Patera: volcanic formation whose shape reminds on an upside-down
saucer and which has very characteristic edges.Planitia: gentle low plain.Planum: plateau, not very rough high-altitude plain.Rupes: cliffs, escarpments; steep slopes.Scopulus: irregular, weathered mountain slope.Sulci: complex network of straight depressions and ridges.Terrae: mainland, frequently term for a region of equal albedo (degree
of reflexions), mainly dating from the time of terrestrial obser- vation.Tholus: dome-shaped hill.Vallis: valley or canyon, frequently bent.Vastitas: extensive plain.
Figure 4. Glossary of morphological terms occuring in the Mars group.
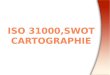
Figure 5. Portion of Mars relief map.
5. References
Wolf, H. (1984): Mars. Westliche Hemisphäre, Östliche Hemisphäre 1:23 500 000. VEB Hermann HaackGeographisch-Kartographische Anstalt Gotha, Gotha.

Planetary Cartography / Cartographie planétaire
13 Index
Session / Séance 04-E
Mathematical planetary cartography basis for non-sphericalcelestial bodies
Maxim V. Nyrtsov - travel award winner,Lev M. Bugaevsky, Kira B. ShingarevaMoscow State University for Geodesy and Cartography4 Gorokhovsky per, 103064 Moscow, RussiaE-mail: [email protected]
Abstract.
During last 40 years the sphere was as reference surface by Solar system bodies mapping (the Moon, Mercury,Venus, Mars). At the present time it is possible to discuss of applying ellipsoid instead of sphere for the Moonand Mars. Except terrestrial group planets and their moons it is also actual mapping of asteroids and cometnucleus. Investigations made by Canadian scientists on the asteroid map development have as a main goal thereal modeling of body shape. In this case the maps have the approximate character. The question about exactmathematical basis for these bodies is not worked out enough. Simultaneously with the problem of the projectiontheory and methods for spherical bodies it is in an anology the same question concerning non-spherical bodies.
In oder to save the possibility of study the form and morphology of investigated surface it can be used trendsurface. For construction trend surface it is possible to use various polinomials, splines etc.
Now the developed cartographical projections of real surfaces of Solar system bodies include mainly perspectiveazimuthal projections. For this purpose it can be used pseudo-cylindrical and conic modified projections also.
As an example we present the calculation of transverce ortographic projection for the model of a real surfaceof Phobos.
The mapping of Solar system bodies by using spacecrafts began 40 years ago when the Soviet interplanetarystation Luna-3 had photographed the other side of the Moon and transferred the image of a lunar surface to theEarth for the first time. Since that time as a result of spacecrafts flights to planets of terrestrial group and theirsatellites , to the giant planets with their numerous environment, to comets and asteroids were created thesurface maps Mercury, Venus, Mars, Moon, Phobos and Deimos, the Galileo satellites of Jupiter (Io, Europe,Ganimede, Callisto), the nucleus of comet Halley, asteroids Gaspra, Ida, Matilda etc. in various scales and witha various covering territory.
With occurrence of the new data, preciseing the form and the size of Solar system bodies came to necessity forspecification of reference surfaces. For Mars (similar to the Earth) ellipsoid with a small polar compression hasapplied. Its parameters: R polar = 3376.3 kms, R equator = 3393.4 kms. Then for the first time triaxial ellipsoidwith semi-axes of 13.5 kms, 10.4 kms and 9.6 kms respectively was tested for Phobos. The map in conformalcylindrical projection and the globe in the form of triaxial ellipsoid were created. The sphere as a referencesurface should be considered as the first approximation for the Moon. The study of the character of equipotentialsurfaces of the Moon has moved forward some arguments for the benefit of triaxial ellipsoid as the followingapproximation. Particulary some decrease of geoid heights differences of the Moon concerning to ellipsoidwas revealed in comparison with differences of heights concerning to sphere. At the same time the average

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
deviations of the Moon geoid heights from ellipsoid are approximately 5 times more than the deviations of theEarth geoid from the Moon geoid. The question of overlapping the centre of a reference surface with theweight centre of the Moon also requires the decision.
Nowadays the question of replacement the Moon sphere by ellipsoid becomes more and more urgent in con-nection with the new data transferred by satellite Clementine (1994), and later confirmed and specified bysatellite Lunar Prospector (1998). The information about presence of water in the craters of northern andsouthern polar areas essentially approaches us to consecutive exploring of the Moon, to creation of constantlyworking lunar base, and also to the using of the Moon natural resources (helium 3 minerals etc.). The purpose-ful exploring of the Moon will require the creation of new, more exacter maps and the development of opti-mum cartographical projections both for a body in general and for separate local regions.
Except the planets and their satellites the questions for asteroids mapping deserve serious attention. The shoot-ings of these bodies begun by satellite Galileo and proceeding by the project NEAR (Near Asteroids Rendevous),had delivered an extensive material for the mapping of the bodies of essentially irregular form. Now the projectNew Millenium wholly devoted to asteroid and comet research is also being developed. The interest aboutasteroids is supported by the project of mineral raw material production the realization of wich is planned on2015-2020.
The creation of asteroid map researches that had been carried out by the Canadian scientists have the purposeof evident modeling a figure of body. Thus this maps have the approached character.
From the point of view of mathematical cartography the creation of the maps on a surface of various celestialbodies requires the decision of two problems:
1.The development of the theory and reception ways of projections of these bodies with irregular form ap-proximated by regular surface (sphere, ellipsoid etc.).
Now in MIIGAiK the researches of the common theory of cartographical projections for regular surfaces arefinished, the formulas are received and the calculations of a number of projections are executed.
2.The development of the theory and reception ways projections of bodies with the more irregular form notapproximated by regular surface (sphere, ellipsoid etc.).
The researches of cartographical projection development for creation the maps on such surfaces have begun inour country and abroad.
It is possible to attribute to such researches the questions of the real surface display, development of projectionsfor personnel space images and their mathematical models wich consider a real relief on images, the possibilityof its consideration at the cartographical and photogrammetry tasks decision.
The works of the American and Canadian scientists [T.C. Duxbury, A. Abergel, P.J. Stooke and C.P. Keller,1990] and many other are known. The development of these researches is connected with the necessity of thecomplex various tasks decision.
We shall not stop on questions of reception of initial materials by remote and other methods, on ways of theirprocessing, in particular for reception of plan-altitude basis etc. Lets consider some directions of researcheswich have for their purpose the development of the theory and practical ways of cartographical projectiondefinition.
It is possible to attribute to their number:
1. Further development of the definition theory of non-spherical body’s figure with the use of the materials ofspace sounding and other materials.
2.The approximation of these surfaces by a sphere surface and the development of real surfaces height modelsconcerning a sphere surface or in the other kind, construction and analysis the models of surfaces heights ofellipsoid and triaxial ellipsoid concerning a surface of sphere in various systems of coordinates.

Planetary Cartography / Cartographie planétaire
13 Index
3.The development of theoretical aspects of the common theory of cartographical projections of irregularsurfaces, research of displaying functions general view wich most expedient for the decision of the givenproblem, definition the theory of cartographical projections classes for non-sherical bodies maps with vari-ous territorial scope.
4.The development of ways of estimation of the offered cartographical projections advantages and the ways ofprivate scale and other characteristics of projections definition.
5.The research of real surface images received by various space shooting systems, the definition and analysisof its mathematical models; the comparative analysis of the same cartographical projections describing thereal images, received by use of various space shooting systems and various coordinates.
6.The calculation of optimum vertical scales of the real surface image construction.
7.The development of ellipsoid and triaxial ellipsoid projections any on character of distortions with use ofheight models and projection formulas of sphere mentioned befor, its comparative analysis for creation ofmaps with various territorial scope.
8.The analysis of cartographical projections from the point of view of its possibility of studying the form andmorphology of bodies.
Briefly we shall only mention some tasks of carring out of these researches.
Now the developed cartographical projections of non-spherical bodies include, mainly, perspective azimuthalprojections which formulas contain three arguments: latitude, longitude and differences of height points of asurface (altitude).
X = f1 (z, a, h) , Y = f2 (z, a, h).For example, formulas of modified orthograthic and stereographic projections it is possible to write down as:
X=(R+h) ××××× sin z ××××× cos a , Y=(R+h) ××××× sin z ××××× sin a.and
X=2 ××××× (R+h) ××××× tg z/2 ××××× cos a , Y=2 ××××× (R+h) ××××× tg z/2 ××××× sin a,where z, a-polar spherical coordinates.
It is possible to use also formulas of projections
- Such as a Lambert projection:X=2 ××××× (R+h) ××××× sin z/2 ××××× cos a,,,,, Y=2 ××××× (R+h) ××××× sin z/2 ××××× sin a.
- Such as a Postel projection:X=(R+h) ××××× z ××××× cos a,,,,, Y=(R+h) ××××× z ××××× sin a.
The application of these projections provides convenient study of the form and morphology of bodies up tohemispheres. It is possible to use in the same purpose pseudo-conic and conic modified projections.
If necessary to study a surface of the bodies in planetary scale it is expedient to use cylindrical, pseudo-cylindrical and polyconic projections, which formulas in a general view can be written down as follows:
- Cylindrical:
X=(R+h) ××××× f (ϕϕϕϕϕ) ,,,,, Y=(R+h) ××××× λλλλλor
X=(R+h) ××××× f1 (ϕϕϕϕϕ) , Y=(R+h) ××××× f2 (λλλλλ).- Pseudo-cylindrical projection:
X=(R+h) ××××× f1 (ϕϕϕϕϕ) , Y=(R+h) ××××× f2 (ϕ,λϕ,λϕ,λϕ,λϕ,λ).- Polyconic projection:
X=(R+h) ××××× [[[[[q(ϕ)(ϕ)(ϕ)(ϕ)(ϕ) −−−−− ρ(ϕ)×ρ(ϕ)×ρ(ϕ)×ρ(ϕ)×ρ(ϕ)×cosδ(ϕ,λ)]δ(ϕ,λ)]δ(ϕ,λ)]δ(ϕ,λ)]δ(ϕ,λ)] ,,,,, Y=(R+h) ××××× [ρ(ϕ)×[ρ(ϕ)×[ρ(ϕ)×[ρ(ϕ)×[ρ(ϕ)×sinδ(ϕ,λ)]δ(ϕ,λ)]δ(ϕ,λ)]δ(ϕ,λ)]δ(ϕ,λ)].It is possible to use also derivative projections as projections by Aitov, Vinkel etc.

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
In all specified projections the displacement of points on a projection will be both on abscisses direction, andon ordinates direction. Sometimes there can be a necessity of reception and research of the image that theinfluence of a relief is only abscisses or ordinates direction. So in these cases general equations of cylindricalprojections of real surfaces is possible to present as:
X=(R+h) ××××× f (ϕϕϕϕϕ), Y=c×λ×λ×λ×λ×λ or Y=f (λλλλλ).Creating the maps of irregular body’s surfaces a choice of vertical scale of the image construction is veryimportant. Than larger is vertical scale, the clearer is influence of altitude values on its values of displacementon a projection. The features of researched surface will be more cleare too. Simultaneously tasks of definitionand study the values of distortion distribution on considered projections will be solved more difficultly.
The definition of distortion value by traditional methods on projections becomes impossible because the re-searched surfaces are not smooth. Their difference from smooth surfaces of sphere or ellipsoid is increasedwith increasing of the image vertical scale.
Therefore there is a task of smoothing the image, transformation of coordinates, but under condition that indeveloped projections the opportunities of study the features and morphology were kept basically. In thesepurposes the known ways of linear and non-linear smoothing, ways of smoothing on the basis of applicationapproximation etc. can be used.
For the same reason there is a task of development of trend models transmitting the basic feature of realsurfaces and at the same time giving an opportunity of definition of private scale, distortions values and otherprojection characteristics. The known approximation ways of a relief with use various polinomials, splines canbe used item for construction trend surfaces.
At the present time the various kinds of space shooting systems (frame, scanners, radar-location etc.) allowedto receive images of real surface are known. The received images represent projections of surface received byphysical methods.
In this case bodies relief influences directly on the image construction by image systems. There is the questionabout using the study methods of these images, development of methods its mathematical description as forstudy features of real surface and for the decision of photogrammetry and cartographical tasks.
There is also task of the comparative analysis all developed ways, results of researches, methods of mathemati-cal models of height construction, trend surface models etc.
With the purposes of development a technique of creation of such models it is possible to use ellipsoid andtriaxial ellipsoid surfaces as real surfaces and to determine differences of height points of these surfaces con-cerning a sphere surface.
If such researches concerning an ellipsoid projection have basically only theoretical interest, it is the only oneof a new method of cartographical projection reception, the reception of triaxial ellipsoid specified projectionshas independent theoretical and practical importance.
Thus, in present paper the basic directions of researches are briefly discribed which performance will allow thedeveloping of theoretical bases of real surface cartographical projections for creation maps of various assign-ment, contents and territorial scope.
In conclusion we present calculation of the transverse ortograthic projection for the model of a real surface ofPhobos.
Let assume sphere as a reference surface with radius R=9600 m and as a real surface - Phobos surface. As wedo not know values of altitudes on grid crossectional points let assume artifitial relief model follow directionsof literature descriptions and distance sounding materials. For receive projection of a real surface take formulasof transverse ortograthic projection and ϕ0=0, λλλλλ0=0:
Xs.= R ××××× sinϕϕϕϕϕYs.= R ××××× cosϕϕϕϕϕ ××××× sinλλλλλ

Planetary Cartography / Cartographie planétaire
13 Index
The calculation was made for the first quarter. Formulas of modified ortographic projection will be following:
Xr.s.= (R+h) ××××× sinϕϕϕϕϕYr.s.= (R+h) ××××× cosϕϕϕϕϕ ××××× sinλλλλλ
The calculations are written down in table 1.
Table 1.
� ϕ(°) λ(°) Xs.(m) Ys. (m) h (m) Xr.s. (m) Yr.s. (m)1 0 0 0 0 3090 0 02 0 20 0 3283,3934 3950 0 4634,3733 0 40 0 6170,761 1890 0 7385,6304 0 60 0 8313,844 1500 0 9612,8825 0 80 0 9454,154 1880 0 11305,5936 0 90 0 9600 1900 0 11500,0007 10 0 1667,023 0 2740 2142,819 08 10 20 1667,023 3233,511 4130 2384,190 4624,5939 10 40 1667,023 6077,013 3260 2233,116 8140,666
10 10 60 1667,023 8187,538 2270 2061,204 10123,54911 10 80 1667,023 9310,525 1710 1963,961 10968,96212 10 90 1667,023 9454,154 1600 1944,860 11029,84713 20 0 3283,393 0 1950 3950,333 014 20 20 3283,393 3085,381 2400 4104,242 3856,72615 20 40 3283,393 5798,619 2550 4155,545 7338,87716 20 60 3283,393 7812,458 2160 4022,157 9570,26117 20 80 3283,393 8883,999 1700 3864,828 10457,20718 20 90 3283,393 9021,049 1750 3881,929 10665,51119 30 0 4800 0 1230 5415 020 30 20 4800 2843,502 1950 5775 3421,08821 30 40 4800 5344,036 1600 5600 6234,70922 30 60 4800 7200 1350 5475 8212,50023 30 80 4800 8187,538 1200 5400 9210,98024 30 90 4800 8313,844 1250 5425 9396,37625 40 0 6170,761 0 890 6742,842 026 40 20 6170,761 2515,225 760 6659,280 2714,34727 40 40 6170,761 4727,077 1100 6877,827 5268,72228 40 60 6170,761 6368,774 480 6479,299 6687,21329 40 80 6170,761 7242,303 450 6460,016 7581,78530 40 90 6170,761 7354,027 400 6427,876 7660,44431 50 0 7354,027 0 640 7844,295 032 50 20 7354,027 2110,525 180 7491,915 2150,09733 50 40 7354,027 3966,489 520 7752,370 4181,34034 50 60 7354,027 5344,036 460 7706,407 5600,10435 50 80 7354,027 6077,013 450 7698,747 6361,87336 50 90 7354,027 6170,761 400 7660,444 6427,87337 60 0 8313,844 0 50 8357,145 038 60 20 8313,844 1641,697 150 8443,748 1667,34839 60 40 8313,844 3085,381 500 8746,857 3246,07840 60 60 8313,844 4156,922 -50 8357,145 4178,57341 60 80 8313,844 4727,077 -50 8270,543 4702,457

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
Table 1. continued.
� ϕ (°) λ (°) Xs. (m) Ys. (m) h (m) Xr.s. (m) Yr.s. (m)42 60 90 8313,844 4800 -100 8227,241 4750,00043 70 0 9021,049 0 -250 8786,126 044 70 20 9021,049 1122,987 50 9068,034 1128,83645 70 40 9021,049 2110,525 450 9443,911 2209,45546 70 60 9021,049 2843,502 250 9255,972 2917,55247 70 80 9021,049 3233,511 -150 8880,095 3182,98848 70 90 9021,049 3283,393 -200 8833,111 3214,98949 80 0 9454,154 0 -200 9257,193 050 80 20 9454,154 570,155 0 9454,154 570,15551 80 40 9454,154 1071,541 370 9818,533 1112,84052 80 60 9454,154 1443,684 300 9749,597 1488,79953 80 80 9454,154 1641,697 300 9749,597 1692,00054 80 90 9454,154 1667,023 400 9848,078 1736,48255 90 0 9600 0 -250 9350 056 90 20 9600 0 -250 9350 057 90 40 9600 0 -250 9350 058 90 60 9600 0 -250 9350 059 90 80 9600 0 -250 9350 060 90 90 9600 0 -250 9350 0
From the table you may see that coordinates of real surface grid in modified orthographic projection are verydifferent from coordinates of initial projection. Values of point’s displacement are the following: maximum∆X=975m, maximum ∆Y=2063,653m. In consequence a real surface of body is visualized and values ofdisplacement shows relief influece on image character.
References.
Atlas of planets of terrestrial group and their satellites. (1992). Moscow, MIIGAiK.
Bugayevsky, L.M., (1971). Problems of research and use conformal and close to them projections for the purposes ofcartography and geodesy. The auto abstract of the doctor’s dissertation, Moscow, MIIGAiK.
Bugayevsky, L.M., (1987). To a question on reception isometric coordinates and conformal cylindrical projection oftriaxial ellipsoid. Izv.vuzov. A geodesy and air photography, 4, pp.79-90.
Bugayevsky, L.M., (1991). Isometric coordinates, conformal cylindrical, conic and azimuthal projection of triaxialellipsoid. Izv.vuzov. A geodesy and air photography, 3, pp.144-152.
Bugayevsky, L.M., Vachrameeva, L.A., (1992). A geodesy. Cartographical projections. Moscow, Nedra.
Snyder, J.P., (1995) Map projections. A reference manual. Taylor and Francis, London.
Bugayevsky, L.M., Portnov, A.M., (1984) The theory of single space images. Moscow, Nedra.
Bugayevsky, L.M., Nyrtsov M.V. (1998). Theoretical aspects of development cartographical projections for real sur-faces of Solar system bodies.Izv.vuzov. A geodesy and air photography, 3.
Map of Phobos. Scale 1:100000. (1988). Moscow, MIIGAiK&MGU, Scient. Adviser Bolshakov, V.D.
Globe of Phobos.
Stooke, P.J., Keller, C.P. (1990). Map projection for non-spherical worlds/The Variable-radius map projections.Cartographica, Vol. 27, pp.82-100

Planetary Cartography / Cartographie planétaire
13 Index
The Mars Pathfinder Landing Site –A Topographic Image Map 1 : 200 000
Hartmut Lehmann, Jörg AlbertzTechnical University of Berlin, Department for Photogrammetry and CartographySekr. EB9, Straße des 17. Juni 135, D - 10623 Berlin, GermanyPhone: +49-30-314 26398, Fax: +49-30-314 21104,E-Mail: [email protected]
Marita Wählisch, Wolfgang Zeitler, Gerhard NeukumGerman Aerospace Center (DLR), Institute of Space Sensor Technology and Planetary Exploration,D - 12489 Berlin, GermanyPhone: +49-30-67055348, Fax: +49-30-67055358,E-Mail: Marita.Waehlisch@dlr. de
Abstract
The authors outline the mapping approach for the generation of a detailed topographic image map of the MarsPathfinder Landing Site. Photogrammetric processing was applied to sixteen Viking images. The analysisgreatly benefits from the new Viking Mars control point network, restored orbiter trajectory data and newplanet rotational parameters, finally supplemented and refined by data derived from the Pathfinder mission. Aselection of 11 images presenting the mapped area, is the data basis for the orthoimage mosaic. As a guidelinefor this project, the design principles and software modules determined for the »Topographic Image MapSeries Mars 1:200 000« proved successsfully its practical use. This concept has been primarily designedamong others to convert digital image data into various map formats. The data prepared for the production ofthe »Topographic Image Map MARS 1:200 000 Mars Pathfinder Landing Site, Mouth of Ares and Tiu VallesRegion« serves as an excellent data base for various thematic mapping purposes.
1. Introduction
More than ever before the planet Mars is subject to observation and mapping activities. Since 1992 the Techni-cal University of Berlin is involved in software development for photogrammetric and cartographic processingof image data of several planets and celestial bodies. As part of the Camera Experiment for the Mars96 Mission(Albertz et al. 1992a, 1992c, 1996) a digital photogrammetric-cartographic production line was developed bythe Technical University of Berlin in cooperation with the German Aerospace Center (DLR), Berlin-Adlershof.With the disastrous accident of the Russian spacecraft Mars96 in November 1996, the entire research projectcame to an abrupt end, a serious setback for the international research of our neighbouring planet.
Making use of the tremendous scientific achievements being invested in the German camera project severalImage Map products of the area where the Mars Pathfinder Landing Site is situated, have been generated. Mapsheet »MARS 1: 2,000,000 Mouth of Ares and Tiu Valles« for example, presents the mapped area on the plan-et’s northern hemisphere in two different cartographic categories. The Image Map, portraying the surface and

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
its morphology, is complemented by the Geologic Map, showing the geological units and features as a conven-tional thematic map. Both cartographic presentations are identical in map projection and scale.
However, the »Topographic Image Map MARS 1:200 000 Mars Pathfinder Landing Site, Mouth of Ares andTiu Valles Region« gives a closer look to the landing site and its neighbourhood. In processing of the imagerysome data acquired during the Mars Pathfinder Mission have been considered in order to improve the geomet-ric quality of the map. This map sheet is an outcome of the cooperation between the NASA Jet PropulsionLaboratory (JPL), German Aerospace Center (DLR) and Technical University of Berlin.
2. Geodetic Aspects
Image data of the Martian surface provided through past space missions were only suited to generate globalmap series in mostly small scales. The German camera experiment HRSC/WAOSS (Albertz et al. 1996) wasexpected to provide much higher resolution, stereo capability and systematic coverage of the planet’s surface.Nevertheless guidelines and software modules, developed for the generation of the new Topographic ImageMap Series Mars 1:200 000 were successfully applied to produce this particular Image Map. Processing ofVIKING Orbiter imagery is based on a newly generated net of control points and upgraded rotational param-eters, finally supplemented and refined by actual informations obtained through the Mars Pathfinder Mission.
2.1 Image Data
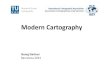
The Viking Orbiter image data was obtained by the two spacecraft which consisted each of an orbiter moduleand the so-called Viking Lander. Among the various tasks to be carried out by the Viking Mission such asBiology, Meteorology and Molecular Analysis one main task of the two onboard vidicon framing cameras wasto provide support in tracing out the terrain for the lander‘s convenient touch-down sites. Altogether 16 high-resolution Viking Orbiter I images from orbit 4 and orbit 6 have been included in this mapping project.
Fig. 1: Viking Orbiter Images. Resolution: 40 meters per pixel.

Planetary Cartography / Cartographie planétaire
13 Index
2.2 Photogrammetric Processing
The Digital Terrain Model (DTM) which was used to generate orthoimages, was obtained by means of blockadjustment. A catalog of 1,219 measured image coordinates for 484 control points (Fig. 2) was employed asinput for the photogrammetric block adjustment, which was carried out to determine precise pointing data ofthe area covered by the 16 selected images. This set of control points was recently recalculated by T. Duxbury,Jet Propulsion Laboratory (JPL) and supplemented with further measurements performed by the German Aero-space Center (DLR) in Berlin. For mosaicking and mapping, leading to the final image map, only 11 imageswere combined (Fig. 1). Five of the 16 images were not included due to overlapping the mapped area to a largeextent.
A conciderably improved geodetic reference network for the whole planet is the result of a project in which1,140 images were involved. The new global model comprises 16,711 coordinate measurements (includingimage coordinates by T. Duxbury), representing a set of Mars-fixed three-dimensional coordinates of 3,739selected landmarks (Zeitler et al. 1999).
This geometrical rectification process was followed by the radiometrical correction, which is essential, be-cause the radiometry of the geometrically corrected images differs significantly between adjacent scenes. Fi-nally the processed block of related imagery was combined by mosaicking, using software, developed at theTechnical University of Berlin in the course of the contribution to the German Camera Experiment for theMars96 Mission (Albertz et al. 1996). Aiming at cartographic demands for an easy readable representation anda pleasing and attractive appearance of the map, it finally was mandatory to perform carefully histogramadjustments and image processing techniques in several iterations to achieve optimal results.
3. Reference System
The map projection and the height information (e.g. contour lines) is referred to a tri-axial ellipsoid centered inthe Martian center of mass for planimetry and the gravity field model Mars50c Aeroid for heights. The refer-ence body refers to the oblate spheroid defined by the International Astronomical Union (IAU - Ellipsoid) with
A = B = 3397.0 km
C = 3375.0 km.

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
4. Cartographic Concept
4.1 Map Projection
The equal-area Sinusoidal Projection (Lehmann et al. 1996) with its useful mathematical and graphical fea-tures was selected for the »Topographic Image Map Mars 1:200 000 Landing Site Mars Pathfinder – Mouth ofAres and Tiu Valles Region«.
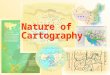
Fig. 4: Sinusoidal Projection. Planet Mars in map scale about 1: 130,000,000
Main attributes of the Sinusoidal Projection (Fig. 4) are:
• It is an equal-area projection.
• The central meridian is a straight line; all other meridians are shown as equally spaced sinusoidal curves.
• Parallels are equally spaced straight lines, parallel to each other.
• Scale is true along central meridian and along all parallels.
4.2 Concept and Design Principles
The map is produced as a Topographic Image Map with the primary cartographic information presented inimage format. Basic information is the orthoimage, supplemented by topographical informations and all neces-sary specifications and marginal annotations.
Terrain relief informations in the form of contour lines must be adapted to the regional topographic situation ofthe planet‘s surface. For the Map Series 1:200,000 it is intended to develop at least 4 suitable equidistancegraduations for the contour lines, because of the enormously varying relief energy. Elevation values for theLanding Site Map are identfied with about 80% of the control points, to be located between - 5000 m and -4200 m. Furthermore the the height difference between geoid and reference ellipsoid must be taken in consid-eration, which is situated at approximately 630 m below the ellipsoid (Oberst et al. 1998). The equidistance of

Planetary Cartography / Cartographie planétaire
13 Index
the contour lines for the Landing Site Map is adapted with regard to the limitations in spatial resolution of theimagery, and the resulting inherent quality of the DTM. So the equidistance graduation is finally determined tobe 500 m (and is not as detailed as usually required for this map scale).
Generally, for the contour lines (and spot heights) a separate printing ink, respectively the colour black, shouldprovide best readability and optimal graphical effect. In this particular case the graphical representation of thecontour lines in a separate brown colour, is layed out in such a way, that the contours can be easily recognized,but the map content, in the form of the image data, is disturbed as less as possible.
The map projection and map scale on which this individual Landing Site Map is based on, was selected withreference to the concept of the »Topographic Image Map Series MARS 1:200 000«. Furthermore the designprinciples concerning nomenclature, layout for the map frame and marginal annotations are correspondingwith this Image Map Series, apart from the individual sheet lines system. Also the cartographic symbol, chosento represent the landing site position is a unique graphical feature for this individual map and has not yet beenintegrated in the map series‘ inventory for cartographic symbols.
The cartographic concept of the map, namely the fact that there is portrayed only a selected area within the mapframe, gives the chance to organize the arrangement of the greater part of the „marginal“ elements within thearea determined by the sheet lines.
Most of the necessary annotations, explanations and diagrams are positioned in the resulting information-freearea not covered by image data. These are notes on:
• Map Projection (Reference Body, Grid System, Map Scale)
• Elevation Information (Gravity Field Model, Contour Lines)
• Index to Imagery
• Reference to cartographic Signature (Explanation of discret signatures and their meaning with regard to thecontents)
• Editors.
Solely the reference to the editorial institutions, each represented in its individual graphical nature (logo) andthe represention of the scale-bar, are arranged outside the mapframe, at the bottom of the map sheet.
In contrast to the concept of the map series »Topographic Image Map MARS 1:200 000« where the subdivisionof the Martian surface into individual sheets follows both, the planetographic and the planetocentric coordinatesystem (Lehmann et al. 1996), only the planetographic coordinate system, which is based on a quadrangle mapprinciple, is applied for this particular Landing Site Map.
As it is with the map series MARS 1:200 000, degree values for longitudes are counting positive to the West.With emphasis to a comfortable sheet size and various practical reasons, the area covered was determined with2°20' for latitude and 2°50' for the dimension in longitude. The sheet corners are:
NW corner: 35°20' West longitude / 20° 40' latitude
NE corner: 32°30' West longitude / 20° 40' latitude
SW corner: 35°20' West longitude / 18° 20' latitude
SE corner: 32°30' West longitude / 18° 20' latitude
4.3 Reflections on the Map Scale
The selection of the map scale requires considerations of different aspects. So the scale has some seriousconsequences concerning the planimetric accuracy, selection of objects and generalization. It causes the graphicalefficiency of the cartographic representation and the structure with regard to the topographic and thematiccontent. Following these aspects, considerations were reflected on the range of the area to be mapped around

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
the landing site, which is directly interrelated with the image data available, and consequently with the allow-able map scale (due to spatial resolution). As a result from our current studies with Viking imagery it wasplanned to generate an image map in 1:200,000.
In this process, tests in the ratio of 1:100,000 and even larger were carried out and yielded partly reasonableresults. However for this project the scale of 1:100,000 would have been less profitable due to the lack ofnoticeable and clearly recognizable topographical features in the closer neighbourhood of the landing site.With respect to the use and properties of a map in general, it is indispensible, in particular for the generation ofimage maps, to provide noticeable (scale-related) patterns and surface features. Provided that the map shouldfully comprise all the prominent and unique topographic features covered in the 11 Viking images, only themap surface would exceed 1800 mm in width and 1700 mm for height. What is more unfavourable in thisaspect, is the fact, that residual disturbing effects like incorrect pixels, striping effects and the „terrace-shapedartefacts“ (due to DTM generation) become more outstanding - they do appear as a serious degradation.
According to the potential of the Viking Orbiter sensors and the technical restrictions in the production andprinting process, finally the scale for the project has been defined to be 1: 200,000. Result of the developmentwas the paper format determined to be 765 mm in height and 870 mm in width. The layout of this map is basedon proven and traditional cartographic experience and actual demands, and is also closely connected with thepotential and technical standards for digital processing.
Fig. 5: General map layout featuring design principles and arrangement of cartographic elements. Sheet size:76.5 cm for height and 87.0 cm in width

Planetary Cartography / Cartographie planétaire
13 Index
5. Realization
The complete production line for this individual map follows the principles determined for the new »Topo-graphic Image Map Series MARS 1:200 000«. As known from experience obtained during the production ofseveral Satellite Image Map projects, the digital production comprises all cartographic processing steps such ascompilation and nomenclature of the map content and the reproduction of the whole map frame. The ImageMap is produced as a color map with the primary information, the image data, printed in black and whiteaccording to the spectral potential of the Viking data sets.
Following the encourraging results, achieved within the research and development work for the »TopographicImage Map Series Mars 1:200 000« it was a reasonable assumption to produce the Landing Site Map in asecond „full-color“ edition. Making use of the flexibility of digital image processing techniques the originalblack and white image data was recomputed to form a data set in the RGB color model. Informations from theViking mission, and above all, the various types of different valuable data gained by the Mars PathfinderMission, yielded the source and criterion for color-matching. Considering that, from a scientific point of view,the synthetic generation of the color image depends largely on the human factor, the „full-color“ TopographicImage Map enjoys, in fact, certain advantage over the origin black and white version. It is evident, that this newTopographic Image Map, in its two versions, is also an ideal data base for many thematic mapping purposes.
Generation of Topographic Image Maps requires the integration of graphical elements into the image. This isstill a relatively new challenge for cartographical design. Recent research activities concentrate on the combi-nation of those graphical elements with the imagery. It can be derived from psychophysical knowledge that theintegration of black graphical elements is more profitable than white ones (Albertz 1993). With respect toimprove the recognizability of the black graphics in dark image areas, the image has to be modified in such away, that a brightened seam (not white) surrounding the graphical element, is generated. So the image informa-tion is interrupted as less as possible and the recognizability of the graphics is reasonably enhanced.
6. Outlook
From the experiences gathered during recent planetary mapping projects, the design principles of the »MapSeries Mars 1: 200 000« again proved its value as a guideline for mapping activities on planet Mars. No doubt,the general public and in particular the community of scientists and engineers working on Mars, will followany mission to the Red Planet with greatest interest and enthusiasm. Mars Global Surveyor is going to reachthe planet Mars in March 1999 and will obtain high resolution image data. However, especially global geologicevaluation is the primary scientific goal for this mission.
A state-of-the-art camera system, definitely designed to meet photogrammetric and cartographic requirements,and to provide high resolution panchromatic and multispectral stereo data sets, like the High Resolution StereoCamera (HRSC) (Albertz et al. 1996) is anticipated to be part of a mission to the planet as soon as possible.Recently the HRSC, originally developed for Mars exploration, has been used in several experiments as anairborne sensor for Earth observation. Photogrammetric processing of the digital image data acquired, yieldedexcellent results (Wewel et al. 1998, Gwinner et al. 1999). Fortunately the European Space Agency (ESA) isgoing to support the Mars Express Mission. The payload of the Mars Express Orbiter spacecraft, which issupposed to be launched in 2003, comprises a modified version of the German HRSC.
Future developements and the optimization of the related factors will be subject to further investigations,hopefully, on the basis of the new, highly expected, high resolution global image data from the Red Planet.

Ottawa ICA / ACI 1999 - Proceedings / Actes
13 Index
Acknowledgements
The contributions of colleagues from DLR and T. Duxbury from JPL are greatefully acknowledged.
References
Albertz, Jörg; Ebner, H.; Heipke, C.; Neukum, G.; Scholten, F. (1992a). The Camera Experiments HRSC and WAOSSon the Mars ’94 Mission. Internat. Archives of Photogrammetry and Remote Sensing, Washington D.C., USA,Vol. XXIX, Part B1, pp. 130-137.
Albertz, Jörg; Lehmann, Hartmut; Tauch, Rüdiger (1992b). Herstellung und Gestaltung hochauflösender Satelliten-Bildkarten. Kartographische Nachrichten 42, pp. 205-213.
Albertz, Jörg; Lehmann, Hartmut; Scholten, Frank; Tauch, Rüdiger (1992c). Satellite Image Maps - Experience, Prob-lems, Chances. Internat. Archives of Photogrammetry and Remote Sensing, Washington D.C., USA,Vol. XXIX,Part B4, pp. 309-314.
Albertz, Jörg (1993). Merging Graphical Elements and Image Data in Satellite Image Maps. Proceedings Workshopand Conference: International Mapping from Space, Hannover, pp. 265-271.
Albertz, Jörg; Ebner, Heinrich; Neukum, Gerhard (1996). The HRSC/WAOSS Camera Experiment on the Mars96 Mis-sion– A Photogrammetric and Cartographic View of the Project. International Archives of Photogrammetryand Remote Sensing, Vienna, Austria, Vol. XXXI, Commission IV/5.
Batson, Raymond M.; Greeley, Ronald (1990). Planetary Mapping. Cambridge University Press, Cambridge, NewYork, Port Chester, Melbourne, Sydney.
Galtier, B., Baudin, A. (1992). Image Maps. Presented Paper ISY ’92 Conference, Symposium: Image Processing, GISand Space-Assisting Mapping, Munich.
Gwinner, Klaus; Hauber, Ernst; Hoffmann, Harald; Scholten, Frank; Jaumann, Ralf; Neukum, Gerhard (1999). TheHRSC – A Experiment on High Resolution Multispectral Imaging and DEM Generation at the Aeolian Islands– New Prospects for Geospatial Analysis and Photogrammetric Volcano Monitoring. Thirteenth InternationalConference on Applied Geologic Remote Sensing, Vancouver, British Columbia, Canada.
Inge, J. L.; Batson, Raymond, M. (1992). Indexes of Maps of the Planets and Satellites 1992. NASA Technical Memo-randum 4395, Washington, D. C., USA. Reference, Version 3.0, Jet Propulsion Laboratory, California Instituteof Technology, Pasadena, California, 1992. National Aeronautics and Planetary Data System Standards SpaceAdministration.
Lehmann, Hartmut (1996). A new Map Series for the Planet Mars – Concept and Realization of the »TopographicImage Map MARS 1: 200 000« International Archives of Photogrammetry and Remote Sensing, Vienna, Aus-tria, Vol. XXXI, Commission IV/5.
Lehmann, Hartmut; Scholten, Frank; Albertz, Jörg; Wählisch, Marita; Neukum, Gerhard (1997). Mapping a WholePlanet – The New Topographic Image Map Series 1: 200 000 for Planet Mars. Proceedings 18th ICA/ACIInternational Cartographic Conference Stockholm (Schweden), Vol. 3, pp. 1471-1478.
Oberst, Jürgen, Wählisch, Marita; Zeitler, Wolfgang; Hauber, Ernst; Jaumann, Ralf (1998). Mars Pathfinder: Carto-graphical Analysis of the Landing Site from Orbit. International Archives of Photogrammetry and RemoteSensing, Stuttgart, Germany, Vol. 32, Part 4, Commission IV, pp. 444-449.
Scholten, Frank (1996) Automated Generation of Coloured Orthoimages and Image Mosaics Using HRSC and WAOSSImage Data of the Mars96 Mission. International Archives of Photogrammetry and Remote Sensing, Vol. XXXI,Part B2, Wien, pp. 351-356.
Snyder, John P. (1987). Map Projections – A Working Manual. U.S. Geological Survey Professional Paper 1395, UnitedStates Government Printing Office, Washington D.C., USA.

Planetary Cartography / Cartographie planétaire
13 Index
Uebbing, Robert; Wewel, Franz; Scholten, Frank; Albertz, Jörg (1997). An Automated Digital Approach toPhotogrammetric and Cartographic Processing of Planetary Image Data. 27 th Annual Meeting, Division forPlanetary Sciences, American Astronomical Society, Mauna Lani / Hawaii (USA).
Wählisch, Marita; Zeitler, Wolfgang; Oberst, Jürgen; Jaumann, Ralf; Duxbury, Thomas; Lehmann, Hartmut; Albertz,Jörg (1998). A Topographic Image Map of the Mars Pathfinder Landing Site. AGU - Conference (AmericanGeophysical Union), USA.
Wewel, Franz; Scholten, Frank; Neukum, Gerhard; Albertz, Jörg (1998). Digitale Luftbildaufnahme mit der HRSC –Ein Schritt in die Zukunft der Photogrammetrie. . Photogrammetrie – Fernerkundung – Geoinformation (PFG),Vol. 6, pp. 337-348.
Zeitler, Wolfgang; Oberst, Jürgen (1999). The Pathfinder landing site and the Viking control point network. Journal ofGeophysical Research, in press.

Planetary Cartography / Cartographie planétaire
13 Index
Session / Séance 04-B
Planetary Mapping Activities and Plans of the National Aeronauticsand Space Administration (NASA)
James R. ZimbelmanCEPS/NASM MRC 315Smithsonian InstitutionWashington, DC 20560-0315Ph: 202-786-2981 Fx: [email protected]
Kenneth L. TanakaU.S. Geological Survey2255 N. Gemini DriveFlagstaff, AZ 86001Ph: 520-556-7208 Fx: [email protected]
Abstract
A brief summary will be presented of on-going planetary mapping activities sponsored and supported by theNational Aeronautics and Space Administration in the United States.
Planetary maps compose one of the primary products derived from data collected by spacecraft that either flypast or orbit various targets throughout the Solar System. The United States has an on-going program wherebycartographic products of planetary objects are compiled, reviewed, and published for NASA by the AstrogeologyTeam of the United States Geological Survey. Planetary maps typically take the form of geodetically control-led geologic, topographic, or image maps. Current geologic mapping programs support systematic mapping ofboth Venus and Mars. The Venus geologic mapping program involves 62 1:5,000,000-scale quadrangles thatcover the planet, each of which corresponds to roughly 5 million square kilometers. As of August 1998,geologic maps of 4 Venus quadrangles have been approved for publication (following rigorous review), 6quadrangles are in review, 35 quadrangles are undergoing mapping, and 17 quadrangles remain unassigned.The Mars geologic mapping program focuses on 1:500,000- and 1:1,000,000-scale quadrangle mapping insupport of specific scientific studies and in preparation for evaluation of prospective landing sites. Scores ofthese maps have either been published or are in various stages of review and production. Other geologic mapsof Mars have been published at regional to global scales of from 1:2,000,000 to 1:30,000,000. As data becomeavailable for other planetary targets with solid surfaces, mapping activities will be undertaken as required tosupport investigations by the planetary science community. For example, systematic, high-resolution, eleven-band spectral imaging of the Moon by the Clementine mission provides suitable data for renewed geologicmapping of the lunar surface. Information on planetary mapping supported by NASA is available on a Website at:
http://wwwflag.wr.usgs.gov/USGSflag/Space/GEOMAP