Embed Size (px)
Citation preview

Doc 9643AN/941
Руководство по одновременномуиспользованию параллельныхили почти параллельныхоборудованных ВПП (SOIR)
Утверждено Генеральным секретареми опубликовано с его санкции
Издание первое — 2004
Международная организация гражданской авиации


ПРЕДИСЛОВИЕ
По просьбе Аэронавигационной комиссии СекретариатИКАО подготовил доклад по одновременному использо-ванию параллельных или почти параллельных оборудо-ванных ВПП, который содержал предложения в отноше-нии минимальных расстояний между оборудованнымиВПП. Рассмотрев этот доклад в 1980 году, Аэронавигаци-онная комиссия признала наличие трудностей в определе-нии приемлемых расстояний между параллельными обо-рудованными ВПП и согласилась, что ИКАО следуетпродолжить изучение этого вопроса. Комиссия обратиласьс просьбой к государствам и заинтересованным междуна-родным организациям предоставить информацию о теку-щей практике и смежных вопросах в отношении мини-мальных расстояний между параллельными ВПП,предназначенными для одновременного использования вприборных метеорологических условиях.
Полученная информация свидетельствовала о том, чточетыре государства имеют эксплуатационный опыт одно-временного использования параллельных оборудованныхВПП и провели исследования по данному вопросу. Былапризнана значительная потребность в одновременном ис-пользовании таких ВПП и поддержано предложение оподготовке ИКАО технических требований и проведенииработы по данному вопросу.
В свете мнений, высказанных заинтересованными го-сударствами и международными организациями в отно-шении минимальных расстояний между одновременноиспользуемыми оборудованными ВПП, Комиссия отмети-ла комплексный характер рассматриваемого вопроса, под-черкнув при этом, что он затрагивает многие дисциплиныв области аэронавигации. Комиссия согласилась также стем, что ввиду сложности проблемы необходима разработ-ка соответствующих руководящих материалов. В январе1981 года Комиссия приняла решение о проведении такогоисследования и учредила исследовательскую группу аэро-навигационных специалистов для сотрудничества с Секре-тариатом под названием «Исследовательская группа по
одновременному использованию параллельных или почтипараллельных оборудованных ВПП (SOIR)».
Таким образом, по просьбе Аэронавигационной ко-миссии Секретариат ИКАО в сотрудничестве с исследова-тельской группой подготовил настоящее руководство поодновременному использованию параллельных или почтипараллельных оборудованных ВПП.
Настоящее руководство содержит информацию о накоп-ленном рядом государств опыте и имеет своей целью упроститьпроведение в жизнь соответствующих положений Приложе-ния 14 «Аэродромы», том 1 «Проектирование и эксплуатацияаэродромов», главы 1 и 3; Правил аэронавигационного об-служивания «Организация воздушного движения» (Doc 4444),глава 6; и «Производство полетов воздушных судов»(Doc 8168), том 1, часть 1, глава 1 и том 2, часть 2, глава 6.
После обновления положений ИКАО, касающихсяSOIR, которые начали применяться 9 ноября 1995 года,Исследовательская группа SOIR продолжила свое участиев анализе применения новых технологий, таких, как все-мирная система спутниковой навигации (GNSS), для поле-тов по приборам при одновременном использовании па-раллельных ВПП, расположенных близко друг к другу, сцелью обновления при необходимости соответствующихположений и инструктивного материала.
Настоящее руководство представляет собой «живой»документ, который будет дополняться и уточняться помере накопления опыта по рассматриваемому вопросу наосновании пояснений и предложений, получаемых отпользователей руководства. Отзывы, предложения и ком-ментарии просим направлять по адресу:
The Secretary General999 University StreetMontreal, Quebec НЗС 5Н7Canada.
(Hi)


ОГЛАВЛЕНИЕ
Страница
Глоссарий терминов и сокращения (vii)
Глава 1. Эксплуатационные принципы
и аспекты 1-1
1.1 Общая концепция 1-11.2 Типы операций 1-11.3 Факторы, которые необходимо учитывать
при введении одновременных операцийна параллельных оборудованных ВПП 1-2
Глава 2. Одновременные заходы на посадкуна параллельные ВПП (типы 1 и 2) 2-1
2.1 Общая концепция 2-1
2.2 Независимые параллельные заходына посадку по приборам (тип 1) 2-12.2.1 Требования и процедуры 2-12.2.2 Промежуточная защитная зона (NTZ) 2-42.2.3 Зона нормальных полетов (NOZ) 2-42.2.4 Сочетание зон нормальных полетов
и промежуточных защитных зон 2-62.2.5 Требования по эшелонированию
при независимых параллельныхзаходах на посадку по приборам 2-6
2.2.6 Факторы безопасности, которыенеобходимо учитывать при независи-мых заходах на посадку на располо-женные близко друг к другу парал-лельные оборудованные ВПП 2-7
2.3 Зависимые параллельные заходы на посадкупо приборам (тип 2) 2-92.3.1 Общая концепция 2-92.3.2 Требования и процедуры 2-92.3.3 Факторы безопасности, которые необ-
ходимо учитывать при зависимыхзаходах на посадку на расположенныеблизко друг к другу параллельныеоборудованные ВПП 2-11
2.4 Различия между независимыми и зависимымипараллельными заходами на посадку 2-11
Страница
Глава 3. Независимые вылеты по приборамс параллельных ВПП (тип 3) 3-1
3.1 Общая концепция 3-13.2 Требования и процедуры 3-13.3 Расстояние между ВПП 3-1
Глава 4. Раздельные операциина параллельных ВПП (тип 4) 4-1
4.1 Общая концепция 4-14.2 Требования и процедуры 4-14.3 Расстояние между ВПП 4-1
Глава 5. Почти параллельные ВПП 5-1
5.1 Общая концепция 5-1
5.2 Наземное оборудование 5-1
Глава 6. Обучение персонала ОВД 6-1
6.1 Общие положения 6-1
6.2 Обучение диспетчеров подхода 6-1
6.3 Обучение диспетчеров аэродрома 6-1
Глава 7. Введение одновременных операций 7-1
7.1 Испытательный период 7-1
7.2 Введение одновременных операций 7-1
Добавление А. Высокоточное посадочноеоборудование и обеспечение безопасностипри независимых параллельных заходахна посадку на расположенные близко другк другу параллельные оборудованные ВПП. ДОБ А-1
Добавление В. Пример размещения ВППи процедуры УВД, используемые во Франции. ДОБВ-1


ГЛОССАРИЙ ТЕРМИНОВ И СОКРАЩЕНИЯ
Термины, определения которых даны в Стандартах иРекомендуемой практике (SARPS) и Правилах аэронави-гационного обслуживания (PANS), используются в соот-ветствии со значениями и видами употребления, зафикси-рованными в указанных документах. Вместе с тем в на-стоящем руководстве содержится ряд других терминов,характеризующих средства, службы, процедуры и т. д.,относящиеся к эксплуатации аэродромов и обслуживаниювоздушного движения, которые пока не вошли в Прило-жения или документы PANS. Эти термины и сокращения,включая содержащиеся в Приложении 14, а также в доку-ментах PANS-ATM и PANS-OPS, приводятся ниже.
ТЕРМИНЫ
Бортовая система предупреждения столкновений(БСПС). Авиационная система, функционирующаянезависимо от наземного оборудования ииспользующая сигналы радиоответчика вторичногообзорного радиолокатора, предназначенная дляпредупреждения пилота о возможных столкновенияхсо встречными летательными аппаратами, имеющимиработающий радиоответчик вторичного обзорногорадиолокатора.
Время запаздывания. Время, предусмотренное для того,чтобы диспетчер УВД мог отреагировать, оценить об-становку и передать пилоту соответствующую коман-ду, чтобы пилот мог оценить ее и отреагировать, атакже для начала реакции воздушного судна.
Дистанция разведения. Минимальное поперечное рассто-яние между параллельными линиями пути двух воз-душных судов после того, как подвергающееся угрозестолкновения воздушное судно выполнило маневр ук-лонения в результате оценки факта отклонения от за-данного курса.
Зависимые параллельные заходы на посадку. Одновре-менные заходы на посадку на параллельные или почтипараллельные оборудованные ВПП в тех случаях, ко-гда установлены минимумы радиолокационного эше-лонирования воздушных судов, находящихся на про-должении осевых линий соседних ВПП.
Зона корректировки. Дополнительное воздушное про-странство, предусмотренное для разрешения кон-фликтных ситуаций.
Зона нормальных полетов (NOZ). Воздушное простран-ство определенных размеров, простирающееся по обестороны линии визирования курсового радиомаяка ILSи/или линии пути окончательного захода на посадку посигналам MLS. При независимых заходах на посадкупринимается во внимание только внутренняя половиназоны нормальных полетов.
Независимые вылеты. Одновременные вылеты с парал-лельных или почти параллельных оборудованных ВПП.
Независимые заходы на посадку. Одновременные заходына посадку на параллельные или почти параллельныеоборудованные ВПП в тех случаях, когда не установ-лены минимумы радиолокационного эшелонированиявоздушных судов, находящихся на продолжении осе-вых линий соседних ВПП.
Полусмешанные параллельные операции. Одновремен-ные операции на параллельных или почти параллель-ных оборудованных ВПП с использованием однойВПП исключительно для вылетов, а другой ВПП какдля заходов на посадку, так и для вылетов или с ис-пользованием одной ВПП исключительно для заходовна посадку, а другой ВПП как для заходов на посадку,так и для вылетов.
Почти параллельные ВПП. Непересекающиеся ВПП,угол схождения/расхождения между продолжениемосевых линий которых составляет 15° или менее.
Промежуточная защитная зона (NTZ). В контексте не-зависимых параллельных заходов на посадку - кори-дор воздушного пространства определенных размеров,расположенный по центру между продолжением осе-вых линий двух ВПП, при входе в который воздушно-го судна необходимо вмешательство диспетчера дляосуществления маневрирования какого-либо подвер-гающегося угрозе воздушного судна, выдерживающегопосадочный курс на смежную ВПП.
Раздельные параллельные операции. Одновременныеоперации на параллельных или почти параллельныхоборудованных ВПП с использованием одной ВППисключительно для заходов на посадку, а другой ВППисключительно для вылетов.
Сигнализация отклонения. Подача звукового или визуаль-ного предупредительного сигнала о возникновении си-
(vii)

Руководство по одновременному использованиюпараллельных или почти параллельных оборудованных ВПП (SOIR)
туации входа летательного аппарата в промежуточнуюзащитную зону (NTZ), установленную между траекто-риями захода на посадку с использованием параллель- ATISных ВПП.
GNSSСистема точного контроля на ВПП (PRM). Специали-
зированная система с использованием вторичного об- ILSзорного радиолокатора для наблюдения воздушных MLSсудов, выполняющих одновременный независимый за- mradход на посадку по приборам на параллельные ВПП, NOZрасстояние между которыми составляет не более NTZ1525 м (5000 фут) и не менее 1035 м (3400 фут). Ми- PGDPнимальная точность системы по азимуту должна рав-няться 0,06° (1 а), период обновления информации - PRM2,5 с или менее. Система должна быть снабжена инди- SOIRкатором с высокой разрешающей способностью иобеспечивать предвычисление положения воздушногосудна и сигнализацию отклонения воздушного суднаот заданной линии пути. ВМУ
ВОРЛСмешанные параллельные операции. Одновременное ОВД
выполнение заходов на осадку и вылетов на парал- ПППлельных или почти параллельных оборудованных сВПП. УВД
СОКРАЩЕНИЯ
служба автоматической передачи инфор-мации в районе аэродромовглобальная навигационная спутниковаясистемасистема посадки по прибораммикроволновая система посадкимиллирадианызона нормальных полетовпромежуточная защитная зонавероятность получения качественной ин-формациисистема точного контроля на ВППодновременное использование парал-лельных или почти параллельных обо-рудованных ВПП
визуальные метеорологические условиявторичный обзорный радиолокаторобслуживание воздушного движенияправила полетов по приборамсекунда(ы)управление воздушным движением

Глава 1
ЭКСПЛУАТАЦИОННЫЕ ПРИНЦИПЫ И АСПЕКТЫ
1.1 ОБЩАЯ КОНЦЕПЦИЯ
1.1.1 Концепция эксплуатации параллельных или почтипараллельных ВПП в целях обеспечения максимальной эф-фективности использования территории аэродрома не нова.Согласно рекомендации, приведенной в Приложении 14(том 1, глава 3, п. 3.1.10), в тех случаях, когда предусмот-рены параллельные ВПП для одновременного использова-ния только при визуальных метеорологических условиях(ВМУ), минимальное расстояние между осевыми линиямиВПП должно составлять 210 м (690 фут), если ВПП рас-считаны для средних или тяжелых воздушных судов. Вме-сте с тем при условиях, указанных в правилах полетов поприборам (ППП), безопасность одновременной эксплу-атации параллельных ВПП зависит от ряда факторов, та-ких, как точность системы обзорной радиолокации, воз-можность вмешательства диспетчеров для осуществленияманеврирования при отклонении воздушного судна от за-данной линии пути окончательного захода на посадку покурсу КРМ системы посадки по приборам (ILS или MLS),точность выведения воздушного судна в створ ВПП, а так-же время реакции диспетчера, пилота и воздушного судна.
1.1.2 Важным доводом в пользу рассмотрения вопросаоб одновременном использовании параллельных или поч-ти параллельных оборудованных ВПП согласно правиламполетов по приборам является необходимость увеличенияпропускной способности аэродромов с высокой плотно-стью движения. Такое увеличение пропускной способно-сти может быть достигнуто либо за счет более эффектив-ного использования существующих параллельных ВПП,либо путем строительства новых ВПП. Последний варианттребует значительных капиталовложений, с другой сторо-ны, пропускная способность аэродрома, уже имеющегопараллельные ВПП, каждая из которых оборудована сис-темой ILS и/или MLS, можно увеличить, обеспечив безо-пасную одновременную и независимую эксплуатациюэтих ВПП согласно правилам полетов по приборам. Тем неменее, другие факторы, такие, как управление наземнымдвижением и контроль за ним, соображения охраны окру-жающей среды, инфраструктура привокзальной площади иконтролируемой зоны аэродрома могут свести к миниму-му потенциальные преимущества одновременного исполь-зования ВПП.
1. 2 ТИПЫ ОПЕРАЦИЙ
1.2.1 Одновременные параллельные заходы на посадку
Возможны два основных типа операций:
- Тип 1, независимые параллельные заходы на посад-ку: одновременные заходы на посадку на параллель-ные или почти параллельные оборудованные ВПП втех случаях, когда минимумы радиолокационногоэшелонирования воздушных судов, находящихся напродолжении осевых линий соседних ВПП, не ус-тановлены.
- Тип 2, зависимые параллельные заходы на посадку:одновременные заходы на посадку на параллельныеили почти параллельные оборудованные ВПП в техслучаях, когда минимумы радиолокационного эше-лонирования воздушных судов, находящихся напродолжении осевых линий соседних ВПП, уста-новлены.
1.2.2 Одновременные параллельные вылеты
- Тип 3, независимые параллельные вылеты: одно-временные вылеты с параллельных или почти па-раллельных оборудованных ВПП.
Примечание. Когда расстояние между двумяпараллельными ВПП меньше, чем величина, уста-новленная с учетом возможного воздействия спут-ных струй, параллельные ВПП рассматриваютсякак одна ВПП с точки зрения эшелонирования вы-летающих воздушных судов.
1.2.3 Раздельные параллельные заходы на посадку/выле-ты
— Тип 4, раздельные параллельные операции: одно-временные операции на параллельных или почтипараллельных оборудованных ВПП с использовани-ем одной ВПП исключительно для заходов на по-садку, а другой ВПП исключительно для вылетов.
1-2Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SO1R)
1.2.3.1 В случае раздельных заходов на посадку и вы-летов (тип 4) могут выполняться полусмешанные опера-ции, т. е. одна ВПП используется исключительно для вы-летов, а другая ВПП используется как для заходов на по-садку, так и для вылетов или одна ВПП используется ис-ключительно для заходов на посадку, а другая ВПП ис-пользуется как для заходов на посадку, так и для вылетов.Могут также выполняться смешанные операции, т. е. од-новременные параллельные заходы на посадку и вылетына обеих ВПП. Тем не менее, во всех случаях полусме-шанные или смешанные операции можно классифициро-вать по четырем основным типам, перечисленным впп. 1.2.1, 1.2.2 и 1.2.3, следующим образом:
a) Полусмешанные параллельные операции1) Одна ВПП используется
исключительно для заходовна посадку, в то время как:- на другую ВПП выполняются
заходы на посадку или- с другой ВПП выполняются
вылеты.2) Одна ВПП используется
исключительно для вылетов,в то время как:- на другую ВПП выполняются
заходы на посадку или- с другой ВПП выполняются
вылеты.
b) Смешанные параллельные операцииВозможны все типы операций
Тип
1 или 2
4
4
3
1,2,3,4
1.3 ФАКТОРЫ, КОТОРЫЕ НЕОБХОДИМОУЧИТЫВАТЬ ПРИ ВВЕДЕНИИ
ОДНОВРЕМЕННЫХ ОПЕРАЦИЙНА ПАРАЛЛЕЛЬНЫХ ОБОРУДОВАННЫХ ВПП
1.3.1 При выполнении одновременных параллельныхзаходов на посадку по ППП на две параллельные или поч-ти параллельные ВПП, каждая из которых оборудованадля захода на посадку по приборам, посадочные миниму-мы каждой из полос остаются неизменными. Эксплуата-ционные минимумы идентичны тем, которые используют-ся при осуществлении операций на одной ВПП.
1.3.2 Существуют специальные процедуры, которыепубликуются в государствах, где используются независи-мые параллельные заходы на посадку. Чтобы экипаживоздушных судов осознавали необходимость максималь-ной точности выхода на курс КРМ ILS или радиостанцииMLS и его выдерживания при заходе на посадку, до началавыполнения маневра захода на посадку, экипажи инфор-мируются о том, что на аэродроме прибытия осуществля-ются одновременные параллельные заходы на посадку по
приборам. Посредством этой процедуры экипажи преду-преждаются и о вероятности немедленного выполненияманевра уклонения (перехода к визуальному полету) вслучае, если воздушное судно, находящееся на продолже-нии осевой линии смежной ВПП, отклонится от заданнойлинии пути.
1.3.3 Теоретические исследования свидетельствуют отом, что максимальная пропускная способность для при-бывающих воздушных судов может быть достигнута засчет выполнения независимых параллельных заходов напосадку, после которых следуют зависимые параллельныезаходы на посадку. Однако на деле эти теоретические вы-годы зачастую могут оказаться гораздо меньшими вслед-ствие трудностей, связанных с практическим осуществле-нием планируемых операций.
1.3.4 Кроме того, уменьшение теоретически ожидае-мого прироста пропускной способности может объяснять-ся незнанием пилотами процедур, действующих на аэро-дромах, обслуживающих большой объем нерегулярногодвижения. Незнание процедур может также привести квыбору неправильных частот ILS или MLS; языковыетрудности, особенно недостаточное владение английским,могут создавать проблемы при осуществлении связи меж-ду диспетчерами и пилотами.
1.3.5 Если в ходе смешанных или полусмешанныхопераций требуется обеспечить вылет воздушных судов, впотоке выполняющих посадку самолетов необходимо пре-дусмотреть «окна». В результате сокращается количествоприбывающих воздушных судов, и этот фактор являетсякритическим при определении максимальной пропускнойспособности ВПП. Кроме того, при осуществлении выле-тов с ВПП, используемой для посадок, возрастает вероят-ность уходов на второй круг, что соответственно приводитк уменьшению пропускной способности.
1.3.6 Факторы, которые могут повлиять на макси-мальную пропускную способность или целесообразностьодновременного использования параллельных ВПП, неограничиваются лишь соображениями, касающимисяВПП. Расположение рулежных дорожек, а также пасса-жирских аэровокзалов относительно ВПП может вызватьнеобходимость пересечения действующих ВПП транс-портными средствами, что приводит не только к задерж-кам взлетно-посадочных операций, но и к снижению уров-ня безопасности в связи с возможностью непреднамерен-ного выезда на ВПП. При определении вариантов исполь-зования конкретных параллельных ВПП необходим тща-тельный анализ общей структуры наземного движения.
1.3.7 Принимая решение о введении одновременныхопераций на конкретном аэродроме, необходимо учиты-вать все вышеизложенные факторы, а также любые другиеограничения, например аспекты охраны окружающей сре-ды.
Глава 2
ОДНОВРЕМЕННЫЕ ЗАХОДЫ НА ПОСАДКУНА ПАРАЛЛЕЛЬНЫЕ ВПП (ТИПЫ 1 И 2)
2.1 ОБЩАЯ КОНЦЕПЦИЯ
2.1.1 Существуют процедуры выполнения независи-мых и зависимых подходов на посадку на параллельныеВПП по ППП. Распространение действия упомянутыхпроцедур на ВПП с уменьшенным расстоянием междуними позволит более активно использовать эти ВПП. Внастоящей главе излагаются требования в отношении за-ходов на посадку по ILS и/или MLS на параллельные ВППс уменьшенным расстоянием между ними.
2.1.2 Концепции, процедуры и параметры для незави-симых и зависимых параллельных заходов на посадку ос-новываются на процедурах заходов на посадку с примене-нием ILS или MLS, выполняемых в автоматическом илиручном режиме. В случае использования других техноло-гий с применением посадочных средств, не рассматривае-мых в настоящем руководстве, потребуется внести изме-нения в критерии эшелонирования и поперечныхрасстояний при операциях на параллельных ВПП.
2.1.3 Главной целью разрешения одновременных опе-раций на параллельных или почти параллельных оборудо-ванных ВПП является увеличение пропускной способно-сти ВПП. Наибольшая пропускная способность дляприбывающих воздушных судов достигается при незави-симых заходах на посадку (тип 1) на параллельные илипочти параллельные оборудованные ВПП.
2.1.4 Потенциальной проблемой, связанной с умень-шением расстояния между ВПП, является вероятностьзахода воздушного судна на посадку на ошибочно вы-бранную ВПП. Такая ситуация может возникнуть, покрайней мере, по двум причинам:
а) Пилот может неправильно истолковать разрешениедля захода на посадку или использовать невернуюкарту захода на посадку и выйти на курс, задавае-мый другим курсовым маяком ILS, или на ошибоч-но выбранную линию пути окончательного заходана посадку по сигналам MLS. Всего этого можноизбежать, если ввести процедуры, требующие под-тверждения номера назначенной ВПП, т. е. устногоуточнения частоты курсового маяка ILS или при-водной радиостанции MLS. Такие процедуры по-
зволят уменьшить, если не совсем исключить, рискзахода воздушного судна на посадку на неверновыбранную ВПП.
Ь) При выполнении захода на посадку по приборам по-сле перехода к условиям визуального полета пилотможет неверно установить визуальный ориентир ивойти в створ ошибочно выбранной ВПП. Такая си-туация подразумевает правильный заход на посадку,но неверный визуальный выбор полосы и может воз-никнуть настолько неожиданно и на таком малом рас-стоянии от порога ВПП, что диспетчер не всегда будетв состоянии обнаружить или исправить ее. Если будетобнаружено, что такая проблема существует, можетпотребоваться совершенствование средств визуально-го опознавания ВПП.
2.1.5 По мере уменьшения расстояния между парал-лельными ВПП диспетчеру подхода становится все труд-нее определять по обычному дисплею радара, правильноли воздушное судно входит в створ ВПП. Погрешностисистем наведения и навигационные ошибки затрудняютопределение предполагаемых действий пилота. Поэтомунеобходимо усовершенствовать характеристики системнаблюдения и навигации, чтобы свести к минимуму коли-чество случаев «ложной тревоги».
2.1.6 Помимо содействия решению проблемы невер-ного выбора ВПП, совершенствование системы наблюде-ния, возможно, отразится и на величине дистанции разве-дения в случае отклонения от посадочного курса. Любоенарушение установленного минимума эшелонированиябудет обнаружено быстрее, благодаря чему у диспетчерабудет больше времени для принятия действий.
2.2 НЕЗАВИСИМЫЕ ПАРАЛЛЕЛЬНЫЕЗАХОДЫ НА ПОСАДКУ ПО ПРИБОРАМ (ТИП 1)
2.2.1 Требования и процедуры
Примечание. См. Правила аэронавигационного обслу-живания «Организация воздушного движения» (PANS-ATM, Doc. 4444, глава 6, п. 6.7.3.2).
2-1

2-2руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SO1R)
2.2.1.1 Независимые параллельные заходы на посадкуна параллельные ВПП могут осуществляться при соблю-дении приведенных ниже условий:
a) расстояние между осевыми линиями ВПП соответ-ствует величине, указанной в томе 1 Приложе-ния 14, и если:
1) расстояние между осевыми линиями ВПП непревышает 1310 м (4300 фут) и составляет неменее 1035 м (3400 фут), ВПП оборудованы со-ответствующей системой с использованиемвторичного обзорного радиолокатора с мини-мальной точностью по азимуту, равной 0,06°(1 а), и периодом обновления информации 2,5 сили менее. Система должна быть снабжена ин-дикатором с высокой разрешающей способно-стью и обеспечивать предвычисление положе-ния воздушного судна и сигнализацию откло-нения воздушного судна от заданной линиипути; или
2) расстояние между осевыми линиями ВПП непревышает 1310 м (4300 фут) и составляет неменее 1035 м (3400 фут), ВПП оборудованы со-ответствующей системой с использованиемвторичного обзорного радиолокатора с техни-ческими характеристиками, отличающимися отвышеприведенных, при условии, что они удов-летворяют требованиям, упомянутым в под-пункте 3) далее, или их превосходят, и если ус-тановлено, что это не снижает уровеньавиационной безопасности; или
3) расстояние между осевыми линиями ВПП со-ставляет или превышает 1525 м (5000 фут),ВПП оборудованы соответствующей системойс использованием вторичного обзорного радио-локатора с минимальной точностью определе-ния азимута, равной 0,3° (1 а), или лучшей ипериодом обновления памяти 5 с или менее.
Примечание. Информация по истории вопроса,касающегося проблем безопасности и системточного контроля на ВПП (PRM), необходимыхдля осуществления независимых подходов на по-садку на расположенные близко друг к другу па-раллельные оборудованные ВПП, приведена в до-бавлении А;
b) заходы на посадку по курсу ILS и/или по сигналамрадиостанции MLS выполняются на обе ВПП.
Примечание. Желательно, чтобы помимо обо-рудования ILS и/или MLS, обслуживающего одно-временные параллельные заходы на посадку, ис-пользуемая для этого ВПП была дополнительноснабжена дальномерной аппаратурой (DME);
c) траектория ухода на второй круг над любой из двухВПП отклонена на угол не менее 30° от траекторииухода на второй круг над соседней ВПП;
d) завершены произведенные должным образом на-блюдение и визуальная оценка препятствий на тер-ритории участков, примыкающих к секторам по-следнего этапа захода на посадку;
e) уведомление о признаках распознавания ВПП ичастоте курсового маяка ILS или приводной радио-станции MLS передается экипажам воздушных су-дов в минимальный срок после того, как это стано-вится возможным;
f) для выхода на курс, задаваемый курсовым маякомILS, или на траекторию последнего этапа захода напосадку по сигналам радиостанции MLS использу-ется наведение по лучу РЛС;
g) по центру между продолжением осевых линийдвух ВПП установлена промежуточная защитнаязона (NTZ) шириной не менее 610 м (2000 фут), ко-торая отображается на дисплее радиолокатора;
h) заходы на посадку на каждую из двух полос кон-тролируются по индивидуальному дисплею радио-локатора отдельным диспетчером, который послетого, как интервал вертикального эшелонированиястановится меньше 300 м (1000 фут), обеспечиваетзаход на посадку так, чтобы:
1) воздушное судно не заходило в отображаемуюна дисплее промежуточную защитную зону(NTZ); и
2) выдерживался установленный минимумпродольного эшелонирования междувоздушными судами, следующими по курсу,задаваемому одним и тем же курсовым маякомILS, или находящимися на линии путиокончательного захода на посадку по сигналамприводной радиостанции MLS; и
i) если ни один из установленных частотных каналовне может быть использован диспетчерами для кон-троля воздушного судна до момента посадки по-следнего:
1) переключение радиосвязи воздушного судна насоответствующую частоту контрольногодиспетчера аэродрома осуществляется прежде,чем одно из двух воздушных судов при оконча-тельном заходе на подсадку на рядом располо-женные ВПП, находящееся на большей высоте,выйдет на глиссадную траекторию ILS или вточку заданного угла места приводной радио-станции MLS; и
Глава 2. Одновременные заходы на посадку на параллельные ВПП (типы 1 и 2) 2-3
2) диспетчерам радиолокационного контроля под-хода к каждой ВПП обеспечено право осущест-вления внеочередной связи в процессе переда-чи команд аэродромного диспетчерскогопункта подхода на соответствующих радиока-налах для каждого из потоков прибывающихвоздушных судов.
2.2.1.2 В кратчайший срок после установления связимежду воздушным судном и диспетчерским пунктом под-хода экипаж воздушного судна должен получить инфор-мацию о том, что выполняются независимые параллель-ные заходы на посадку. Это может быть сделано службойавтоматической передачи информации в районе аэродрома(ATIS).
2.2.1.3 Независимо от времени проведения параллель-ных заходов на посадку каждый диспетчер радиолокаци-онного контроля подхода должен нести ответственность заобеспечение очередности и эшелонирования воздушныхсудов, прибывающих на каждую ВПП.
2.2.1.4 В процессе наведения воздушного судна по лу-чу радиолокатора на курс КРМ ILS или на траекториюMLS последнего этапа захода на посадку окончательноенаправление по РЛС должно выводить воздушное судно вточку пересечения с курсом КРМ ILS или с траекториейMLS последнего этапа захода на посадку под углом неболее 30° и обеспечивать до момента упомянутого пересе-чения горизонтальный полет воздушного судна по прямойна участке протяженностью не менее 2 км (1,0 м. мили).Направления по лучу РЛС должны также обеспечить воз-душному судну возможность стабилизироваться на курсеКРМ ILS или на линии пути MLS последнего этапа заходана посадку и следовать по упомянутому курсу или по упо-мянутой линии пути в горизонтальном полете на участкепротяженностью не менее 3,7 км (2,0 м. мили) до выходана глиссадную траекторию ILS или в точку заданного угламеста приводной радиостанции MLS.
2.2.1.5 Необходимо обеспечить минимум вертикально-го эшелонирования в 300 м (1000 фут) и в соответствии стехническими характеристиками радиолокатора и его дис-плея минимум радиолокационного эшелонирования, рав-ный 5,6 км (3,0 м. мили), на расстоянии не менее 19 км(10 м. миль) от порога ВПП до момента стабилизации воз-душного судна при полете:
a) по курсу на курсовой радиомаяк ILS и/или по ли-нии пути последнего этапа захода на посадку посигналам приводной радиостанции MLS; и
b) в зоне нормальных полетов (NOZ).
2.2.1.6 В соответствии с техническими характери-стиками радиолокатора и его дисплея необходимо обес-печить минимум радиолокационного эшелонирования,равный 5,6 км (3,0 м. мили) для воздушных судов, сле-дующих по курсу на один и тот же курсовой радиомаякILS или по одной и той же линии пути последнего этапа
захода на посадку по сигналам приводной радиостанцииMLS до момента, пока не потребуется увеличение ми-нимума продольного эшелонирования в связи с воз-можным воздействием спутных струй или по какой-либо другой причине.
2.2.1.7 При радиолокационном наведении каждой па-ры воздушных судов, выполняющих параллельные заходына посадку, устанавливаются «высокий» и «низкий» уров-ни в целях обеспечения вертикального эшелонирования дотех пор, пока воздушные суда не стабилизируются на па-раллельных курсах, задаваемых соответствующими курсо-выми маяками ILS, и/или на траекториях последнего этапазахода на посадку по сигналам приводных радиостанцийMLS. Абсолютная высота низкого уровня должна бытьтаковой, чтобы находящееся на нем воздушное судно име-ло достаточно времени для стабилизации на курсе КРМILS или на линии пути MLS последнего этапа захода напосадку до выхода на глиссадную траекторию ILS или вточку заданного угла места приводной радиостанции MLS.Высокий уровень должен быть выше низкого на 300 м(1000 фут) на протяжении не менее 19 км (10 м. миль) отпорога ВПП.
2.2.1.8 Если обнаружено, что воздушное судно от-клонилось от заданного курса в сторону границы проме-жуточной защитной зоны (NTZ), соответствующий кон-трольный диспетчер должен немедленно дать командуэкипажу вернуться на курс КРМ ILS или на траекториюMLS последнего этапа захода на посадку. Если обнару-жено, что воздушное судно вошло в промежуточную за-щитную зону (NTZ), соответствующий контрольныйдиспетчер должен сразу же дать команду экипажу воз-душного судна, находящегося на курсе КРМ ILS или налинии пути MLS последнего этапа захода на посадку,немедленно набрать высоту и выполнить разворот дозаданных им значений высоты и курса, чтобы избежатьстолкновения с отклонившимся воздушным судном. Уголразворота по команде диспетчера в любом случае недолжен превышать 45° от линии пути по курсу КРМ ILSили от линии пути MLS при окончательном заходе напосадку. Там, где для оценки препятствий применяютсякритерии поверхностей оценки препятствий для заходовна посадку на параллельные ВПП (PAOAS), диспетчерУВД не должен давать команду воздушному судну обизменении курса, если оно находится на высоте ниже120 м (400 фут) относительно порога ВПП.
2.2.1.9 Радиолокационный контроль не должен пре-кращаться:
a) до начала применения эшелонирования посредст-вом визуального наблюдения, при условии, что со-гласно процедурам оба диспетчера радиолокаци-онного контроля обязательно оповещаются оначале визуального эшелонирования; или
b) до момента посадки воздушного судна или, в слу-чае ухода на второй круг, если на участке длинойне менее 2 км (1,0 м. мили) после прохода над вы-

2-4Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
ходной кромкой ВПП не обеспечено адекватноеэшелонирование с другими участниками воздуш-ного движения.
Примечание. Информация о прекращении радиоло-кационного контроля на борт воздушного судна не пе-редается.
2.2.2 Промежуточная защитная зона (NTZ)
2.2.2.1 Поскольку при заходах на посадку по типу 1 необеспечивается радиолокационное эшелонирование воз-душного движения между продолжениями осевых линийсоседних параллельных ВПП, необходимо предусмотретьсредство, позволяющее определить, не отклонилось ливоздушное судно слишком сильно от курса КРМ ILS илиот линии пути MLS при окончательном заходе на посадку.Такая цель достигается использованием концепции «про-межуточной защитной зоны» (NTZ) (см. рис. 2-1).
2.2.2.2 NTZ представляет собой коридор воздушногопространства, расположенный по центру между продол-жением осевых линий двух ВПП. Минимальная ширинаNTZ равна 610 м (2000 фут) и простирается от ближайше-го порога ВПП до точки, в которой интервал вертикально-го эшелонирования в 300 м (1000 фут) между воздушнымисудами, находящимися на продолжениях осевых линийдвух ВПП, уменьшается. Смысл установления NTZ за-ключается в том, что в случае входа одного из воздушныхсудов в эту зону признается необходимым вмешательстводиспетчеров радиолокационного контроля для обеспече-ния эшелонирования воздушных судов. Ширина NTZ оп-ределяется четырьмя факторами, описанными ниже:
a) Зона обнаружения. Необходим определенный до-пуск на размеры воздушного пространства для уче-та ограничений, связанных с техническими харак-теристиками системы наблюдения, а также сбыстротой реакции диспетчера при обнаруженииотклонившегося от заданного курса воздушногосудна. Величина этого допуска зависит от скоростиобновления информации в системе обзорной ра-диолокации, точности радиолокационной системыи разрешающей способности дисплея радиолокато-ра, используемого для контроля.
b) Время запаздывания/время реакции. Определенныйдопуск на размеры воздушного пространства сле-дует ввести для учета:
1) времени, необходимого диспетчерам для реаги-рования, определения требуемого маневра дляразрешения конфликтной ситуации и передачисоответствующей команды для обеспеченияэшелонирования;
2) времени, необходимого пилоту для восприятиясообщения и реагирования на него; и
3) времени, требующегося воздушному судну,чтобы начать выполнять маневр после поступ-ления соответствующей команды на вход сис-темы управления.
c) Зона корректировки. Дополнительный допуск наразмеры воздушного пространства должен бытьпредусмотрен для завершения маневра уклонениявоздушным судном, подвергающимся опасностистолкновения.
d) Дистанция разведения. При анализе отклонениявоздушного судна от курса необходимо сделать до-пуск для адекватного эшелонирования линий пути.Требуемая дистанция должна включать величинупоперечного эшелонирования и допуск на тот факт,что подвергающееся опасности столкновения воз-душное судно может при этом не находиться точнона продолжении осевой линии соседней ВПП.
2.2.2.3 Определение допусков на размеры воздушногопространства зоны обнаружения, время запаздывания/вре-мя реакции, зоны коррекции и дистанции разведения ос-новывается на нескольких исходных допущениях. Однойиз наиболее сложных и важных задач диспетчера радиоло-кационного контроля является определение требуемогоманевра воздушного судна, подвергающегося опасностистолкновения, если не удалось возвратить отклонившеесявоздушное судно на исходную линию пути по курсу КРМILS или траекторию MLS при окончательном заходе напосадку. Отворот от воздушного судна, создающего опас-ность, не всегда обеспечивает оптимальный поперечныйинтервал. Поэтому время, отводимое диспетчеру для оп-ределения надлежащего корректирующего маневра, долж-но быть достаточно большим.
2.2.3 Зона нормальных полетов (NOZJ
2.2.3.1 Зона нормальных полетов заключает воздуш-ное пространство, в котором воздушные суда могут со-вершать маневры для выхода на курс КРМ ILS или траек-торию MLS при окончательном заходе на посадку ипродолжать дальнейший полет (см. рис. 2-1).
2.2.3.2 У продолжения каждой осевой линии ВПП име-ется одна NOZ. NOZ устанавливается по обе стороны про-должения осевой линии ВПП, и ее общая ширина равняетсяудвоенному расстоянию от продолжения осевой линии ВППдо ближайшей границы NTZ. Таким образом, воздушноепространство между продолжениями осевых линий двухВПП состоит из NTZ и двух внутренних половин NOZ, огра-ниченных продолжениями осевых линий ВПП. Предполага-ется, что после стабилизации на курсе КРМ ILS или линиипути MLS при окончательном заходе на посадку воздушныесуда будут оставаться в пределах NOZ без вмешательствадиспетчера радиолокационного контроля.
2.2.3.3 NOZ простирается от порога ВПП до точки, в ко-торой воздушное судно выходит на продолжение осевой

Глава 2. Одновременные заходы на посадку на параллельные ВПП (типы 1 и 2) 2-5
NOZ
NOZ простираетсяот порога ВППдо точки, в которойвоздушное судностабилизируетсяна продолженииосевой линии ВПП
ILS/MLS № 1
NTZ
NTZ простираетсяот ближайшегопорога ВПП до точки,в которой интервалвертикальногоэшелонированияуменьшается
NOZ
NOZ простираетсяот порога ВППдо точки, в которойвоздушное судностабилизируетсяна продолженииосевой линии ВПП
ILS/MLS№2
Рис. 2-1. Зоны нормальных полетов (NOZ) и промежуточная защитная зона (NTZ)
2-6Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
линии ВПП. Ширина NOZ определяется с учетом используе-мых систем наведения и точности выдерживания воздушнымсудном линии пути; чем точнее навигационное средство ивыдерживание линии пути, тем меньше ширина NOZ.
2.2.3.4 Ширина NOZ должна быть такой, чтобы свести кминимуму вероятность выхода за ее пределы любого воз-душного судна, выполняющего нормальный полет. Это по-зволяет уменьшить рабочую загрузку диспетчеров и убедитьпилотов в том, что все действия диспетчера радиолокационно-го контроля абсолютно необходимы и не являются проявле-ниями «мелочной опеки». Оставшаяся часть поперечного рас-стояния между линиями пути при заходах на посадку, т. е.NTZ, должна, таким образом, быть достаточной для безопасно-го разрешения потенциальных конфликтных ситуаций.
2.2.4 Сочетание зон нормальных полетови промежуточных защитных зон
Размеры NOZ и NTZ определяются наличием и взаим-ным расположением ВПП. При наличии параллельныхВПП прежде всего устанавливается ширина NTZ на осно-вании рассмотренных выше соображений по обеспечениюбезопасности. После этого оставшееся воздушное про-странство можно отнести к двум внутренними половинамзон нормальных полетов, связанных с продолжениямиосевых линий обеих ВПП. По итогам определяется тре-буемый уровень точности системы наведения при заходена посадку. Если в наличии только одна ВПП, и возникаетвопрос о том, на каком минимальном расстоянии от нее
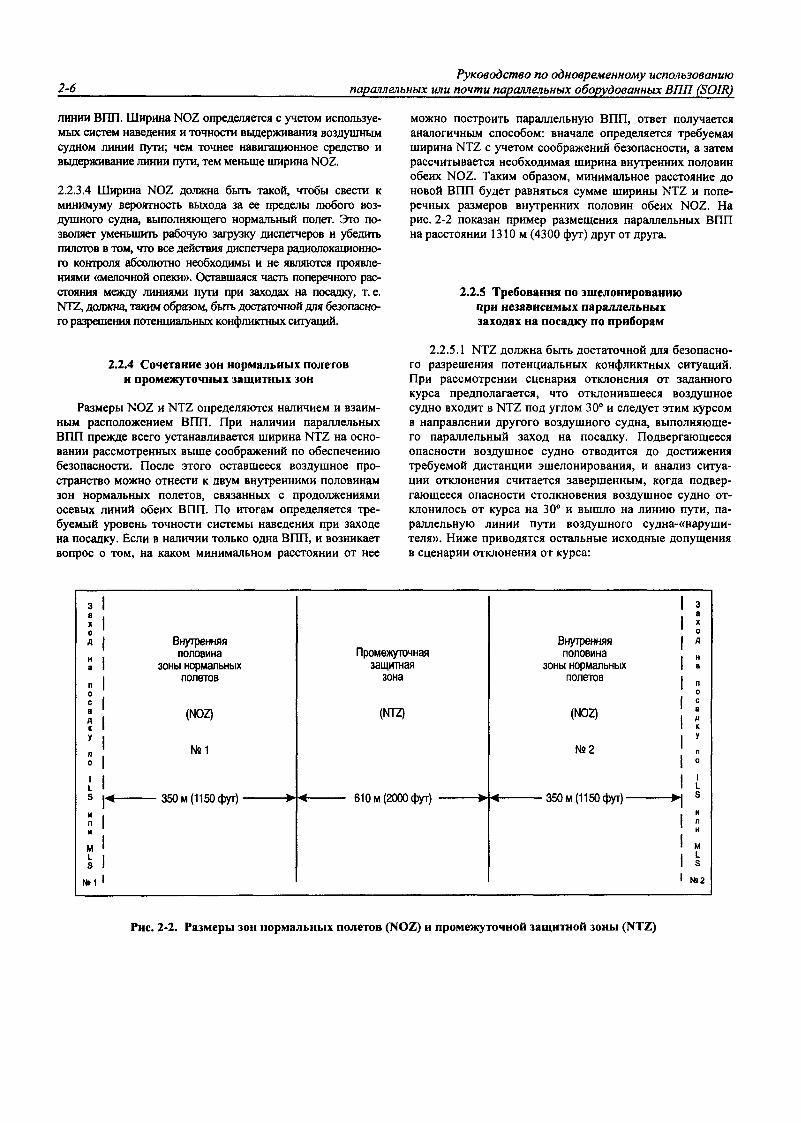
можно построить параллельную ВПП, ответ получаетсяаналогичным способом: вначале определяется требуемаяширина NTZ с учетом соображений безопасности, а затемрассчитывается необходимая ширина внутренних половинобеих NOZ. Таким образом, минимальное расстояние доновой ВПП будет равняться сумме ширины NTZ и попе-речных размеров внутренних половин обеих NOZ. Нарис. 2-2 показан пример размещения параллельных ВППна расстоянии 1310 м (4300 фут) друг от друга.
2.2.5 Требования по эшелонированиюпри независимых параллельныхзаходах на посадку по приборам
2.2.5.1 NTZ должна быть достаточной для безопасно-го разрешения потенциальных конфликтных ситуаций.При рассмотрении сценария отклонения от заданногокурса предполагается, что отклонившееся воздушноесудно входит в NTZ под углом 30° и следует этим курсомв направлении другого воздушного судна, выполняюще-го параллельный заход на посадку. Подвергающеесяопасности воздушное судно отводится до достижениятребуемой дистанции эшелонирования, и анализ ситуа-ции отклонения считается завершенным, когда подвер-гающееся опасности столкновения воздушное судно от-клонилось от курса на 30° и вышло на линию пути, па-раллельную линии пути воздушного судна-«наруши-теля». Ниже приводятся остальные исходные допущенияв сценарии отклонения от курса:
захоА
на
посадкУ
по
ILS
или
МLS
№1
Внутренняяполовина
зоны нормальныхполетов
(НОТ)
№1
350 м (1150 фут)
Промеж/точнаязащитная
зона
(NTZ)
610 м (2000 фут)
Внутренняяполовина
зоны нормальныхполетов
(NOZ)
№2
•350 м (1150 фут)-
iLsили
МLS
№2
Рис. 2-2. Размеры зон нормальных полетов (NOZ) и промежуточной защитной зоны (NTZ)

Глава 2. Одновременные заходы на посадку на параллельные ВПП (типы 1 и 2) 2-7
a) скорость воздушного судна 278 км/ч (150 уз);
b) угловая скорость отворота 3°/с;
c) навигационная точность 46 м (150 фут) (1 а) на19 км (10 м. миль); и
d) навигационная точность воздушного судна, сле-дующего заданным курсом, предполагается равнойвеличине в пределах 3 о чистой точности выдер-живания заданной линии пути.
2.2.5.2 Ниже приводятся соответствующие значениядля ВПП, расстояние между которыми составляет 1310 м(4300 фут):
a) зона обнаружения: 275 м (900 фут) при использо-вании обзорного радиолокатора с минимальнойточностью по азимуту 0,3° (1 о) и скоростью об-новления информации 5 с или менее;
b) время запаздывания: 8 с, что соответствует 300 м(1000 фут) при условии использования зарезерви-рованной частоты с правом внеочередного уста-новления связи;
c) зона корректировки: 180 м (600 фут) при предпо-лагаемой скорости корректировки курса воздуш-ным судном, подвергающимся опасности столкно-вения, равной 3%;
d) дистанция разведения: 60 м (200 фут) с навигацион-ным буфером шириной 140 м (450 фут), т. е. предпо-лагается, что подвергшееся опасности столкновениявоздушное судно в момент угрозы считается откло-нившимся от осевой линии соответствующей ВПП неболее чем на 140 м (450 фут), а не просто находящим-ся в пределах его собственной NOZ;
e) внутренняя половина NOZ: 350 м (1150 фут), т. е.ширина внутренней половины NOZ для воздушно-го судна, отклонившегося от курса. Эта величинаобусловлена следующими факторами:
1) наведение: прямой курс ILS и/или MLS, в руч-ном или автоматическом режиме управления; и
2) точность выдерживания курса: анализ различ-ных радиолокационных данных, связанных сзаходами на посадку по ILS или MLS.
2.2.6 Факторы безопасности, которыенеобходимо учитывать при независимых
заходах на посадку на расположенные близкодруг к другу параллельные оборудованные ВПП
Примечание. Информация по истории вопроса, касающе-гося проблем безопасности и систем точного контроля на
ВПП (PRM), необходимых для осуществления независимыхподходов на посадку на расположенные близко друг к другупараллельные оборудованные ВПП, приведена в добавлении А.
Независимые операции на расположенных близко другк другу параллельных оборудованных ВПП являются ввысшей степени критическими в отношении безопасности,и решение об их проведении должно приниматься толькопосле тщательного рассмотрения определенных аспектов,связанных с безопасностью. При этом перечисленные ни-же аспекты требуют особого внимания.
a) Погодные ограничения. Независимые заходы напосадку по приборам на параллельные ВПП, рас-стояние между осевыми линиями которых не пре-вышает 1525 м (5000 фут) и не менее 1035 м(3400 фут), должны осуществляться только по раз-решению соответствующего органа обслуживаниявоздушного движения (ОВД) с учетом сложныхметеоусловий (градиент ветра по высоте, турбу-лентность, нисходящие воздушные потоки, боко-вой ветер, неблагоприятная погода, например гро-за), которые могут вызывать отклонения воздуш-ных судов от курса КРМ ILS или от линии путиMLS при окончательном заходе на посадку на-столько, что это приведет к снижению безопасно-сти и/или к неприемлемому количеству срабатыва-ний предупредительной сигнализации. ОрганыОВД должны разработать критерии, определяющиевозможность проведения одновременных операцийна параллельных или почти параллельных обору-дованных ВПП в описываемых условиях, и гаран-тировать, что независимые и зависимые парал-лельные заходы на посадку проводятся толькотогда, когда воздушные суда в состоянии адекват-но выдерживать курс КРМ ILS или линию путиMLS при окончательном заходе на посадку. Привыработке этих критериев необходимо учитыватьметеоусловия, характерные для каждого конкрет-ного аэродрома.
b) Техническая ошибка при заходе на посадку по курсуКРМ ILS или по линии пути MLS. Воздушное суд-но, использующее сигналы КРМ ILS или привод-ной радиостанции MLS на окончательном этапе за-хода на посадку, подвержено влиянию ошибок,зависящих от нескольких факторов, включая точ-ность подаваемого сигнала, точность бортовогооборудования и способность пилота или автопило-та точно выполнять команды навигационного на-ведения. Величина ошибки, выражающейся в от-клонении от курса КРМ ILS или приводнойрадиостанции MLS на окончательном этапе заходана посадку, для каждой конкретной ВПП можетварьироваться. Поэтому важно, чтобы величина та-кой ошибки измерялась при каждой установке обо-рудования и вырабатывались процедуры, гаранти-рующие сведение к минимуму ложныхсрабатываний системы предупредительной сигна-лизации.
2-8Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SO1R)
c) Радиосвязь Если отмечается грубое отклонение откурса на окончательном этапе захода на посадку,проблема радиосвязи между пилотами и контроль-ными диспетчерами приобретает критическое зна-чение. При независимых параллельных заходах напосадку требуется два аэродромных диспетчера, поодному на каждую ВПП, с предоставлением им от-дельных частотных каналов аэродромного диспет-черского пункта. Обоим диспетчерам радиолока-ционного контроля подхода может быть либопредоставлено право автоматического внеочеред-ного использования этих частот, либо для нихдолжны резервироваться отдельные радиоканалы,если это возможно. Перед началом дежурства каж-дого диспетчера радиолокационного контроля под-хода необходимо проверять автоматическое осу-ществление функции внеочередной связи с егорабочего места. Органы ОВД должны предпринятьшаги к тому, чтобы в случае отклонения гаранти-ровать диспетчерам радиолокационного контроляподхода незамедлительный радиоконтакт как с от-клонившимся воздушным судном, так и с тем воз-душным судном, которое подвергается опасностистолкновения. Для этого потребуется исследовать,в течение каких интервалов времени каналы радио-связи окажутся заблокированными.
d) Оценка препятствий. Поскольку необходимостьотвернуть воздушное судно от курса может воз-никнуть в любой момент выполнения им захода напосадку, требуются выявление и оценка препятст-вий на территории напротив другой параллельнойВПП, чтобы обеспечить безопасные заблаговре-менные отвороты при потенциальной угрозестолкновения в случае, если воздушное судно, вы-полняющее заход на посадку на соседнюю ВПП,отклонится от курса. Такой анализ может бытьсделан с использованием критериев поверхностейоценки препятствий для заходов на посадку на па-раллельные ВПП (PAOAS). Любое препятствие,которое, по мнению службы ОВД, может помешатьвыполнению отворотов в процессе независимыхпараллельных заходов на посадку на близко распо-ложенные параллельные ВПП, должно отобра-жаться на дисплее радиолокатора в помощь дис-петчеру радиолокационного контроля подхода.
Примечание Пример метода оценки подобныхпрепятствий приведен в PANS-OPS, том 2,часть III Подробное изложение критериев облетанаблюдаемых препятствий на территории, приле-гающей к сектору окончательного этапа захода напосадку, содержится в приказе ФАУ № 8260 41
e) Обучение пилотов Эксплуатанты должны гаранти-ровать, что экипажи воздушных судов, совершаю-щие одновременные независимые заходы на посад-ку на параллельные ВПП, прошли адекватнуюподготовку. Незамедлительные маневры отворотапо команде диспетчерского пункта аэродрома от-
личаются от процедур ухода на второй круг, про-фессионально освоенных пилотами. Государства иэксплуатанты воздушных судов должны устано-вить параметры маневра отворота, обучение пило-тов и критерии периодических проверок их про-фессионального мастерства. Отклонение от курсаможет вынудить диспетчера радиолокационногоконтроля подхода принять решение командоватьвозвращением воздушного судна на курс КРМ ILSили на траекторию MLS, используя частотный ка-нал аэродромного диспетчера по праву вне-очередного установления связи. Пилот, осуществ-ляющий в данный момент управление воздушнымсудном, должен ясно понимать, что слово «немед-ленно», содержащееся в команде диспетчера ра-диолокационного контроля подхода, обозначаетчрезвычайную ситуацию и требует моментальноговыполнения соответствующего маневра для сохра-нения эшелонирования с другим воздушным суд-ном.
f) Обучение диспетчеров. Прежде чем быть допу-щенными к работе, диспетчеры службы УВДдолжны пройти обучение, включающее инструк-таж по специфическим обязанностям диспетчерарадиолокационного контроля подхода.
g) Анализ риска Результаты анализа риска на основа-нии имеющихся данных показали, что вероятностьситуации, при которой дистанция разведения воз-душных судов составляет менее 150 м (500 фут),ожидается равной величине, меньшей, чем одинслучай на 56 000 000 заходов на посадку, т. е.1,8 х 10~8. Это подтверждает правильность приня-той концепции. Тем не менее, нельзя утверждать,что все подобные операции в какой-нибудь частисвета были бы безопасными. Поэтому важно, чтогде бы ни рассматривался вопрос о введении неза-висимых заходов на посадку на расположенныеблизко друг к другу параллельные ВПП, этомудолжен предшествовать анализ риска с учетомконкретных особенностей места в целях обеспече-ния приемлемого уровня безопасности.
h) Бортовая система предупреждения столкновений(БСПС) При оценке ситуаций, вызвавших сраба-тывание системы БСПС II, зарегистрирован ряднеобоснованных уходов на второй круг, что яви-лось результатом «ложных» рекомендаций по раз-решению угрозы столкновения (RA). Чтобы испра-вить положение, в логику системы предупрежде-ния столкновений был внесен ряд усовершенство-ваний. Тем не менее эти усовершенствования непривели к полному устранению подобных ситуа-ций. В связи с этим при выполнении параллельныхзаходов на посадку необходимо рекомендовать ис-пользование режима «только консультативная ин-формация о воздушном движении (ТА)», чтодолжно быть отражено в публикуемых схемах за-хода на посадку.

Глава 2. Одновременные заходы на посадку на параллельные ВПП (типы 1 и 2) 2-9
i) Отказ радиоответчика. Вторичный обзорныйрадиолокатор (ВОРЛ) и посадочные средстваВПП (PRM), работая совместно с бортовым ра-диоответчиком, обеспечивают обнаружение иотображение воздушного судна на дисплее дис-петчера радиолокационного контроля подхода.Если на аэродром прибывает воздушное судно сотказавшим радиоответчиком, служба управлениявоздушным движением (УВД) должна организо-вать «окно» в потоке прибывающих воздушныхсудов, чтобы для этого воздушного судна не по-требовалось специальных мер усиленного кон-троля. Если отказ радиоответчика произошел привыполнении захода на посадку по приборам, дис-петчер радиолокационного контроля подхода обя-зан дать команду на отворот любому соседнемувоздушному судну.
j) Быстрые/медленные воздушные суда. Если воз-душное судно отклоняется от курса в сторону бо-лее медленного воздушного судна, производящегозаход на посадку на соседнюю ВПП, то последнееможет оказаться не в состоянии совершить доста-точно быстрый маневр, чтобы обеспечить безопас-ное эшелонирование. Служба УВД должна создать«окно» в потоке прибывающих воздушных судовдля заходящего на посадку более медленного воз-душного судна.
к) Символика карты подхода. На картах, отобра-жающих схемы процедур инструментальных под-ходов к ВПП, на которых проводятся одновремен-ные параллельные инструментальные операции,такие ВПП должны иметь соответствующие обо-значения, в частности с использованием термина«близко расположенные параллельные ВПП». При-меняемая терминология должна быть отражена внаименовании карты подхода, содержащем обозна-чения ВПП.
1) Необоснованные отвороты. Под необоснованнымотворотом подразумевается ситуация, когда дис-петчер радиолокационного контроля подхода ини-циировал отворот, а отклонившееся от курса воз-душное судно после этого остается в пределахNOZ. Отслеживание количества срабатыванийпредупредительной сигнализации, как необходи-мых, так и ложных, следует использовать как спо-соб оценки качества работы системы. Если отсле-живается слишком большое количество ложныхсрабатываний, то, возможно, требуется внести из-менения в параметры механизма выработки сигна-лов тревоги.
т ) Автопилоты. АВТОПИЛОТЫ устаревших модифика-ций, установленные на большинстве давно экс-плуатируемых воздушных судов, не обеспечиваютзаметного снижения величины технической ошиб-ки при заходе на посадку. Современные автопило-ты значительно более совершенны, и позволяют
уменьшить эту величину при их использовании дляILS/MLS операций.
2.3 ЗАВИСИМЫЕ ПАРАЛЛЕЛЬНЫЕ ЗАХОДЫНА ПОСАДКУ ПО ПРИБОРАМ (ТИП 2)
2.3.1 Общая концепция
2.3.1.1 Если расстояние между осевыми линиями ВППнедостаточно для выполнения независимых заходов напосадку, но составляет не менее 915 м (3000 фут), можноиспользовать процедуру зависимых заходов на посадку. Вэтом случае требования в отношении диспетчерского кон-троля и по сравнению с требованиями контроля независи-мых параллельных заходов на посадку упрощаются, и ого-воренное минимальное расстояние между ВПП сокра-щается.
2.3.1.2 При зависимых параллельных заходах на по-садку радиолокационное эшелонирование воздушных су-дов, находящихся на соседних траекториях, предоставляетсредство защиты в виде NOZ и NTZ, установленных длянезависимых параллельных заходов на посадку. Такимобразом, зависимые параллельные заходы на посадку мо-гут осуществляться на ВПП, менее удаленные друг от дру-га, чем это требуется для независимых параллельных за-ходов на посадку.
2.3.2 Требования и процедуры
Примечание. См. Правила аэронавигационного обслу-живания «Организация воздушного движения», глава 6,п. б. 7.3.4 (PANS-ATM, Doc. 4444).
2.3.2.1 Зависимые параллельные заходы на посадку напараллельные ВПП могут осуществляться при следующихусловиях:
a) расстояние между осевыми линиями ВПП соответ-ствует величинам, оговоренным в томе I Приложе-ния 14;
b) обеспечивается радиолокационное наведение воз-душных судов в точку разворота на курс окончатель-ного захода на посадку, осуществляемое отдельнымидиспетчерами радиолокационного контроля подхода,которые несут ответственность за установление оче-редности заходов на посадку и эшелонирование воз-душных судов, прибывающих на каждую ВПП;
c) используется соответствующий вторичный обзор-ный радиолокатор с минимальной точностью поазимуту 0,3° (1 а) и скоростью обновления инфор-мации 5 с или менее;
d) на обеих ВПП работает оборудование ILS и/или MLS.

2-10Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
Примечание. Желательно, чтобы помимо обо-рудования ILS и/или MLS, обслуживающего одно-временные параллельные заходы на посадку, ис-пользуемая для этого ВПП была дополнительноснабжена дальномерной аппаратурой (DME);
e) экипажи воздушных судов информируются о том,что обе ВПП используются для независимых па-раллельных заходов на посадку (эта информацияможет быть предоставлена службой ATIS);
f) траектория ухода на второй круг над любой из двухВПП отклонена на угол не менее 30° от траекторииухода на второй круг над соседней ВПП;
g) диспетчерскому пункту контроля подхода предостав-лено право установления внеочередной связи при пе-редаче команд аэродромным диспетчерским пунктом.
2.3.2.2 Минимум радиолокационного эшелонированиямежду воздушными судами после стабилизации на курсеКРМ ILS и/или на линии пути MLS при окончательномзаходе на посадку должен составлять:
a) 5,6 км (3,0 м. мили) между воздушными судами накурсе одного и того же КРМ ILS и/или на одной итой же линии пути MLS при окончательном заходена посадку, если не требуется увеличение интерва-ла продольного эшелонирования из-за влиянияспутных струй; и
b) 3,7 км (2,0 м. мили) между воздушными судами,следующими друг за другом по курсам соседних
КРМ ILS или по линиям пути соседних радиостан-ций MLS при окончательном заходе на посадку(см. рис. 2-3).
2.3.2.3 В точке разворота воздушных судов на парал-лельные заходы на посадку по курсам КРМ ILS и/или пососедним линиям пути MLS между этими воздушнымисудами должен быть обеспечен либо минимум верти-кального эшелонирования 300 м (1000 фут), либо минмумрадиолокационного эшелонирования 5,6 км (3,0 м. мили).
2.3.2.4 При радиолокационном наведении каждой парывоздушных судов, выполняющих параллельные заходы напосадку, устанавливаются «высокий» и «низкий» уровни вцелях обеспечения вертикального эшелонирования до техпор, пока воздушные суда не стабилизируются на парал-лельных курсах, задаваемых соответствующими курсовымимаяками ILS, и/или на линиях пути последнего этапа заходана посадку по сигналам приводных радиостанций MLS.Абсолютная высота низкого уровня должна быть таковой,чтобы находящееся на нем воздушное судно имело доста-точно времени для стабилизации на курсе КРМ ILS или налинии пути MLS последнего этапа захода на посадку довыхода на глиссадную траекторию ILS или в точку заданно-го угла места приводной радиостанции MLS. Высокий уро-вень должен быть выше нижнего на 300 м (1000 фут) напротяжении не менее 19 км (10 м. миль) от порога ВПП.
2.3.2.5 Отдельный контрольный диспетчер не требует-ся. Вместо этого контроль заходов на посадку осуществля-ется диспетчером радиолокационного контроля подхода,предупреждающим нарушения установленных интерваловэшелонирования.
ВПП № 1Линия визирования ILS № 1
Расстояниемежду ВПП
3,7 км (2,0 м. мили)
ВПП №2
Линия визирования ILS № 2
- Продольное эшелонирование •
Рис. 2-3. Зависимые параллельные заходы на посадку

Глава 2. Одновременные заходы на посадку на параллельные ВПП (типы 1 и 2) 2-11
2.3.3 Факторы безопасности, которыенеобходимо учитывать при зависимых
заходах на посадку на расположенные близкодруг к другу параллельные оборудованные ВПП
2.3.3.1 Величина минимально допустимого расстояниямежду двумя воздушными судами для случая отклоненияот заданного курса рассчитывается по той же методике,что и при независимых заходах на посадку. Действующиепроцедуры позволяют осуществлять зависимые парал-лельные заходы на посадку на ВПП, расстояние междукоторыми составляет всего 915 м (3000 фут). Минимальнодопустимое расстояние между воздушными судами дляслучая отклонения от заданного курса при расстояниимежду ВПП, равном 915 м (3000 фут), превышает соответ-ствующее значение для расстояния между ВПП, равного1310 м (4300 фут). По мере уменьшения расстояния междуВПП минимально допустимое расстояние между воздуш-ными судами увеличивается (см. таблицу 2-1). При этомучитываются два фактора:
a) поскольку радиолокационное эшелонированиеосуществляется по диагонали, уменьшение рас-стояния между ВПП означает увеличение миниму-ма продольного эшелонирования воздушных су-дов; и
b) уменьшение расстояния между ВПП также означа-ет, что отклонившееся от заданного курса воздуш-ное судно быстрее пересечет линию пути захода напосадку на соседнюю ВПП.
2.3.3.2 Тем не менее, прежде чем принимать решениеоб уменьшении минимального расстояния между ВПП,предназначенными для проведения зависимых параллель-ных заходов на посадку, необходимо рассмотреть другиевозможные проблемы. В настоящее время, с учетом воз-действия спутных струй, параллельные ВПП, расстояниемежду которыми составляет менее 760 м (2500 фут), рас-сматриваются как одна ВПП. Таким образом, эшелониро-вание воздушных судов, заходящих на посадку друг задругом, должно осуществляться с соблюдением миниму-ма, установленного для одной полосы.
Примечание. См. минимумы эшелонирования с учетомвоздействия спутных струй в п. 8.7.4.4 главы 8 PANS-ATM.
2.4 РАЗЛИЧИЯ МЕЖДУ НЕЗАВИСИМЫМИИ ЗАВИСИМЫМИ ПАРАЛЛЕЛЬНЫМИ
ЗАХОДАМИ НА ПОСАДКУ
2.4.1 Различия в концепциях и геометрии независимыхи зависимых заходов на посадку обусловливают различияв допущениях, а иногда и в методике анализа обоих типовопераций. Например, при решении, имеет ли место откло-нение воздушного судна от курса, используются разныекритерии. Так, при независимых параллельных заходах на
посадку воздушное судно, вошедшее в промежуточнуюзащитную зону (NTZ) между двумя ВПП, считается от-клонившимся от курса, в то время как при зависимых па-раллельных заходах на посадку отклонением от курса счи-тается нарушение норм диагонального эшелонированиявоздушных судов. Эти различия в сводной форме пред-ставлены в таблице 2-2.
2.4.2 Некоторые вводные для анализа отклонения откурса отличаются из-за того, что для каждого типа опера-ций используются разные «сигнализаторы». Посколькупри независимых параллельных заходах на посадку пока-зателем отклонения от курса является боковое смещение снаправления на осевую линию ВПП, вводной считаетсябоковая (азимутальная) погрешность радиолокатора идисплея. Для зависимых параллельных заходов на посадкусущественным фактором является эшелонирование воз-душных судов по диагонали, и хотя этот вид эшелониро-вания имеет боковой компонент, оно в принципе рассмат-ривается как продольное. Поэтому вводной для анализазависимых параллельных заходов на посадку являетсякомбинация дальномерной погрешности радиолокатора ипродольной погрешности дисплея.
2.4.3 При независимых параллельных заходах на по-садку определяется размер NOZ. Для этого необходимоустановить величину боковой навигационной ошибки идопустимую частоту ложных срабатываний предупреди-тельной сигнализации (при выходе за пределы внутреннейполовины NOZ). При расчете зависимых параллельныхзаходов на посадку нет необходимости учитывать боковуюграницу NOZ, поскольку «сигнализатором» является про-дольное эшелонирование.
2.4.4 Другие различия по вводным объясняются темфактом, что при независимых параллельных заходах напосадку, в отличие от зависимых, требуется два диспетче-ра радиолокационного контроля подхода. Поэтому пред-полагается, что любое нарушение границ NTZ будет не-медленно обнаружено. При зависимых параллельныхзаходах на посадку, когда наличие двух диспетчеров ра-диолокационного контроля подхода не предусматривается,внимание единственного диспетчера время от времениможет быть отвлечено от дисплея. На этом основании зна-чение вероятности получения достоверной информации(PGDP) принято равным 0,5.
2.4.5 Отсутствие отдельных мониторов является при-чиной разницы используемых в расчетах параметров вре-мени запаздывания. Предполагается, что понадобится 8 сдля того, чтобы контрольный диспетчер отреагировал,скоординировал обстановку с другим контрольным дис-петчером, определил необходимый маневр уклонения ипередал соответствующие команды для обеспечения эше-лонирования и чтобы пилот и воздушное судно осущест-вили требуемый маневр. При зависимых параллельныхзаходах на посадку допускается, что диспетчер будетждать следующего цикла обновления информации, чтобыубедиться, что отклонение от заданного курса действи-тельно имеет место.

2-12Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
2.4.6 При независимых параллельных заходах на по-садку учитывается только боковой компонент эшелониро-вания линий пути. Продольный компонент, который такжеможет наличествовать, при анализе никакой роли не игра-ет. Исходный продольный параметр местоположения воз-душного судна не является фиксированным, и поэтомуможно рассчитать ожидаемое значение продольного эше-лонирования, хотя для этого потребуются данные о веро-
ятном относительном местоположении в начальный мо-мент отклонения от курса.
2.4.7 Анализ зависимых параллельных заходов на по-садку основывается на минимальном эшелонированиивоздушных судов в случае отклонения от курса, посколькупри этом известны исходные боковые и продольные пара-метры местоположений обоих воздушных судов.
Таблица 2-1. Минимум эшелонирования воздушных судов на случай отклонения от курсапри выполнении зависимых параллельных заходов на посадку
Расстояние между ВПП Минимум эшелонирования
1310м (4 300 фут)915 м (3 000 фут)
Примечание Скорость полета 278 км/ч (150уз)
2 135 м (7 000 фут)2 300 м (7 500 фут)
Таблица 2-2. Резюме различий в анализе независимых и зависимых заходов на посадку
Ситуация Независимые заходы на посадку Зависимые заходы на посадку
Отклонение от курса
Информация для анализа
Критерии исправленияситуации отклонения откурса
Нарушение NTZ (боковой границы)
Погрешность по азимуту (радиолокатор идисплей)Боковая навигационная ошибка
Частота ложного срабатыванияпредупредительной сигнализации
PGDP • = 1,0 (косвенно)Два контрольных диспетчера
Время запаздывания при контроле = 8 с
Дистанция разведения
Нарушение норм эшелонирования (в основ-ном продольного)
Комбинированная погрешность по расстоя-нию и азимуту (в основном дисплей)Боковая навигационная ошибка не рассматри-ваетсяЧастота ложного срабатыванияпредупредительной сигнализации отдельно нерассматриваетсяPGDP* = 0,5 (учитываемый фактор)Отдельные контрольные диспетчеры не пре-дусматриваютсяВремя запаздывания при контроле = 12 с
Минимум эшелонирования воздушных судов
* Вероятность получения достоверной информации (PGDP) - вероятность того, что качественная радиолокационная информация будет инди-цирована и воспринята диспетчерами

Глава 3
НЕЗАВИСИМЫЕ ВЫЛЕТЫ ПО ПРИБОРАМС ПАРАЛЛЕЛЬНЫХ ВПП (ТИП 3)
3.1 ОБЩАЯ КОНЦЕПЦИЯ
Параллельные ВПП могут использоваться для незави-симых вылетов по приборам одним из перечисленных ни-же способов:
a) обе ВПП используются исключительно для выле-тов (независимые вылеты);
b) одна ВПП используются исключительно для выле-тов, а другая ВПП используется как для вылетов,так и для посадок (полусмешанные операции); и
c) обе полосы используется как для вылетов, так идля посадок (смешанные операции).
3.2 ТРЕБОВАНИЯ И ПРОЦЕДУРЫ
Независимые вылеты по ППП могут осуществляться спараллельных ВПП при соблюдении следующих условий:
a) расстояние между осевыми линиями ВПП соответ-ствует требованиям, изложенным в томе I Прило-жения 14;
b) взаимное расхождение курсов сразу же после взле-та составляет не менее 15°;
c) используется соответствующий обзорный радиоло-катор, который обеспечивает идентификацию воз-
душных судов в пределах 2 км (1,0 м. мили) от вы-ходного порога ВПП; и
d) процедуры ОВД обеспечивают требуемые величи-ны взаимного расхождения курсов.
3.3 РАССТОЯНИЕ МЕЖДУ ВПП
3.3.1 Если расстояние между параллельными ВПП со-ставляет не менее 1525 м (5000 фут) и может быть обеспе-чено взаимное расхождение курсов сразу же после взлетана 45°, то единственным требованием в отношении спе-циализированных видов диспетчерского или навигацион-ного контроля при выполнении независимых вылетов поприборам является наличие надежной двусторонней ра-диосвязи (см. рис. 3-1).
3.3.2 Одновременный взлет воздушных судов, выле-тающих в одном и том же направлении с параллельныхВПП, разрешается в тех случаях, когда расстояние междуосевыми линиями ВПП составляет не менее 760 м(2500 фут), используется соответствующий радиолокатори взаимное расхождение курсов сразу же после взлета со-ставляет 15° или более (см. рис. 3-2).
Примечание. Процедуры для независимых вылетов поприборам с параллельных ВПП изложены в п. 6.7 главы 6PANS-ATM.
3-1

3-2Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SO1R)
Расстояниемежду ВПП
Взаимное расхождение Требуется пикурсов после взлета радиолокатор
1525 м (5000 фут) или более 45° Нет
1525 м (5000 фут) или более
Рис. 3-1. Независимые вылеты по приборам с параллельных ВПП,расстояние между которыми составляет не менее 1525 м (5000 фут)
Расстояниемежду ВПП
Взаимное расхождениекурсов после взлета
Требуется лирадиолокатор
Не более 1525 м (5000 фут)и не менее 760 м (2500 фут)
15° или более Да
760 м (2500 фут) или более
I _]15° или более
Рис. 3-2. Независимые вылеты по приборам с параллельных ВПП,расстояние между которыми составляет не более 1525 м (5000 фут)
и не менее 760 м (2500 фут)

Глава 4
РАЗДЕЛЬНЫЕ ОПЕРАЦИИНА ПАРАЛЛЕЛЬНЫХ ВПП (ТИП 4)
4.1 ОБЩАЯ КОНЦЕПЦИЯ
4.1.1 Теоретические исследования и некоторые прак-тические примеры свидетельствуют о том, что максималь-ная пропускная способность аэродрома может быть дос-тигнута путем использования параллельных ВПП всмешанном режиме эксплуатации. Тем не менее имеетсяряд факторов, такие, как инфраструктура привокзальнойплощади и контролируемой зоны аэродрома, разнообразиетипов воздушных судов и соображения по защите окру-жающей среды, которые приводят к уменьшению практи-чески достижимой пропускной способности.
4.1.2 Препятствием к выполнению смешанных опера-ций на конкретном аэродроме могут стать и другие факто-ры, например отсутствие средств обеспечения посадок наодной из параллельных ВПП или ограниченная длина ВПП.
4.1.3 С учетом этих ограничений максимальная пропу-скная способность в некоторых случаях может быть достиг-нута только лишь за счет раздельного режима эксплуатации,т. е. когда одна ВПП используется исключительно для по-садок, а другая - исключительно для вылетов.
4.1.4 Раздельные операции характеризуются следующимипреимуществами по сравнению со смешанными операциями:
a) не требуются отдельные контрольные диспетчеры;
b) отпадает необходимость обеспечения взлетов и по-садок на одной и той же ВПП, благодаря чемууменьшается количество потенциальных уходов навторой круг;
c) в целом менее сложные процедуры УВД, как для дис-петчеров радиолокационного контроля подхода, так идля диспетчеров аэродромного диспетчерского пункта;
d) уменьшение вероятности ошибки пилота из-за вы-бора неверной частоты ILS или MLS.
4.2 ТРЕБОВАНИЯ И ПРОЦЕДУРЫ
4.2.1 Раздельные операции с параллельных ВПП могутосуществляться при соблюдении следующих условий:
a) расстояние между осевыми линиями ВПП соответ-ствует требованиям, изложенным в томе I Прило-жения 14; и
b) н. минальное значение угла отклонения линии путивылета сразу же после взлета от линии пути уходана второй круг над соседней ВПП составляет неменее 30°.
4.2.2 Ниже перечислены типы заходов на посадку впроцессе раздельных операций на параллельных ВПП приусловии, что используемый соответствующий обзорныйрадиолокатор и требуемые наземные средства обеспеченияпосадки удовлетворяют требованиям стандарта, регламен-тирующего данный тип захода на посадку:
a) заход на посадку с использованием ILS и/или MLS;
b) заход на посадку с использованием обзорного ра-диолокатора или посадочной РЛС; и
c) визуальный заход на посадку.
4.3 РАССТОЯНИЕ МЕЖДУ ВПП
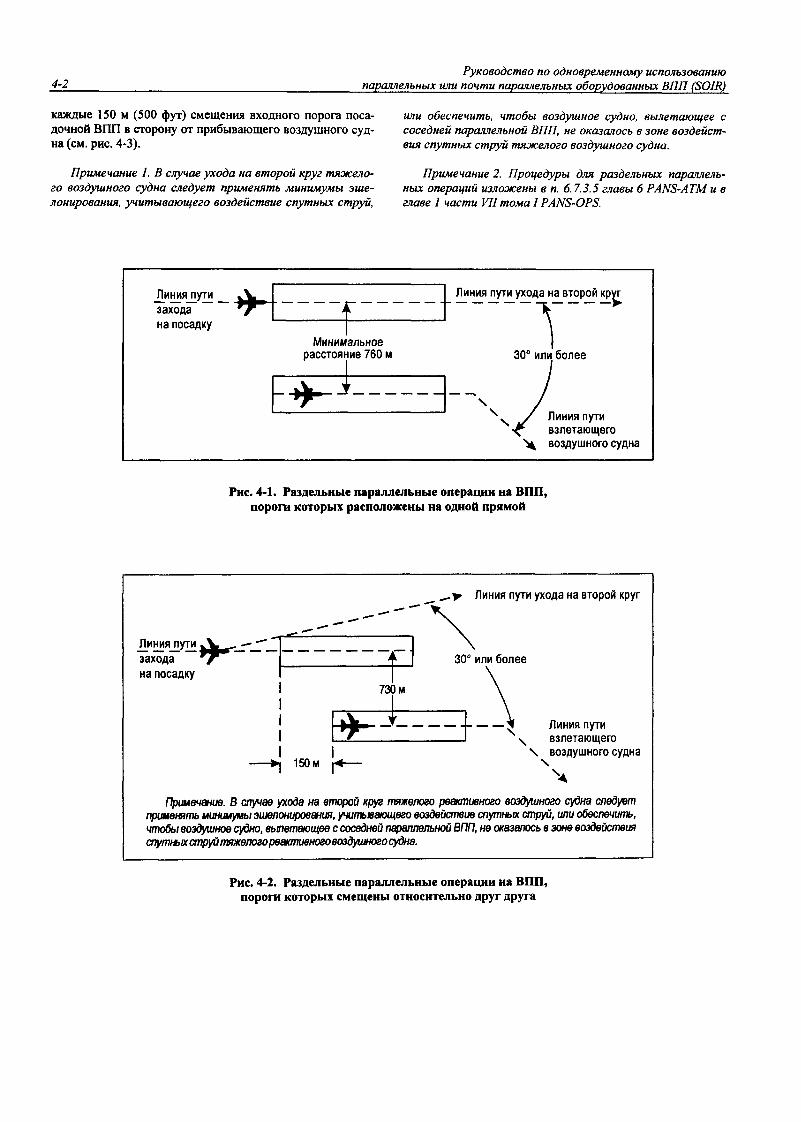
4.3.1 Если пороги параллельных ВПП расположены наодной прямой и расстояние между осевыми линиями этихВПП составляет не менее 760 м (2500 фут), может разре-шаться одновременное выполнение вылета с одной ВПП иконечного этапа захода на посадку на другую параллель-ную ВПП при условии, что курс вылетающего воздушногосудна сразу же после взлета отклоняется по крайней мерена 30° от линии пути ухода на второй круг воздушногосудна, выполняющего заход на посадку на соседнююВПП, до тех пор, пока не начнут применяться минимумыэшелонирования (см. рис. 4-1).
4.3.2 Минимальное расстояние между осевыми линия-ми параллельных ВПП при раздельных параллельных опе-рациях может быть уменьшено на 30 м (98 фут) на каждые150 м (500 фут) смещения входного порога посадочнойВПП в направлении навстречу прибывающему воздушно-му судну до минимальной величины 300 м (984 фут) (см.рис. 4-2) и должно быть увеличено на 30 м (98 фут) на
4-1
4-2Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
каждые 150 м (500 фут) смешения входного порога поса-дочной ВПП в сторону от прибывающего воздушного суд-на (см. рис. 4-3).
Примечание 1. В случае ухода на второй круг тяжело-го воздушного судна следует применять минимумы эше-лонирования, учитывающего воздействие спутных струй,
или обеспечить, чтобы воздушное судно, вылетающее ссоседней параллельной ВПП, не оказалось в зоне воздейст-вия спутных струй тяжелого воздушного судна.
Примечание 2. Процедуры для раздельных параллель-ных операций изложены в п. 6.7.3.5 главы 6 PANS-ATM и вглаве 1 части VII тома I PANS-OPS.
заходана посадку
Минимальноерасстояние 760 м
Линия пути ухода на второй круг
30° или более
Линия путивзлетающеговоздушного судна
Рис. 4-1. Раздельные параллельные операции на ВПП,пороги которых расположены на одной прямой
^1иния_путизаходана посадку
730 м
.у- Линия пути ухода на второй круг
30° или более
150м
Линия путивзлетающего
\ воздушного судна\
ч.
Примечание. В случае ухода на второй круг тяжелого реактивного воздушного судна следуетприменять минимумы эшелонирования, учитывающего воздействие спутных струй, или обеспечить,чтобы воздушное судно, вылетающее с соседней параллельной ВПП, не оказалось в зоне воздействияспутныхструйтяжелогореактивноговоздушногосудна.
Рис. 4-2. Раздельные параллельные операции на ВПП,пороги которых смещены относительно друг друга

Глава 4. Раздельные операции на параллельных ВПП (тип 4) 4-3
Линия пути - \захода * /на посадку
>
У' 790 м
150 м |Ч I
4> i-
__, у Линия пути ухода„ •— " ^ 1 н а второй круг
\\
30° или
1
Ч ч У л
Vе
более
1ния пути взлетающегоздушного судна
Рис. 4-3. Раздельные параллельные операции на ВПП,пороги которых смещены относительно друг друга


Глава 5
ПОЧТИ ПАРАЛЛЕЛЬНЫЕ ВПП
5.1 ОБЩАЯ КОНЦЕПЦИЯ
5.1.1 Почти параллельными считаются непересекаю-щиеся ВПП, угол схождения/расхождения между продол-жениями осевых линий которых составляет 15° или менее.
5.1.2 Специальные процедуры для одновременноговыполнения операций на почти параллельных ВПП покане разработаны. Каждая ситуация рассматривается на ин-дивидуальной основе с учетом ряда переменных факторов.
5.1.3 Наиболее важным фактором, который следует при-нимать во внимание при разработке процедур одновременно-го выполнения операций на почти параллельных ВПП, явля-ется точка пересечения продолжений осевых линий ВПП.Местоположение этой точки зависит от положения двух ВППотносительно друг друга (находятся их пороги на одной пря-мой или смещены) и от угла схождения.
5.1.4 Важно также рассмотреть и то, в каком направ-лении будут выполняться одновременные операции надвух ВПП, т. е. в направлении схождения или расхожде-ния. В направлении расхождения двух почти параллель-
ных ВПП независимые заходы на посадку выполняться немогут, поскольку траектории захода на посадку в этомслучае пересекаются. С другой стороны, при независимыхвылетах или раздельных операциях направление расхож-дения создает естественное боковое эшелонирование, итакие операции допустимы (см. рис. 5-1). Пример осуще-ствления операций в направлениях схождения и расхож-дения двух ВПП приведен в добавлении В.
5.1.5 Различные типы операций, описанные в преды-дущих главах, следует также рассмотреть с точки зрениявозможности их выполнения на почти параллельных ВПП.Прежде чем вводить такие процедуры, необходимо изу-чить каждый тип операций применительно к конкретномуаэродрому.
5.2 НАЗЕМНОЕ ОБОРУДОВАНИЕ
Наземное оборудование должно соответствовать стан-дартам, установленным для тех типов захода на посадку,которые выполняются на данном аэродроме. Требуетсяоборудование обзорной радиолокации.
Независимые заходы на посадку не разрешаются Разрешаются независимые вылеты,раздельные или полусмешанные операции
Рис. 5-1. Операции на почти параллельных ВПП
5-1


Глава 6
ОБУЧЕНИЕ ПЕРСОНАЛА ОВД
6.1 ОБЩИЕ ПОЛОЖЕНИЯ
6.1.1 Непременным условием для введения операций напараллельных оборудованных ВПП является обучение пер-сонала ОВД. В настоящей главе рассматривается толькодополнительное обучение, которое необходимо пройтидиспетчерам, допущенным к исполнению ограниченныхфункций по обеспечению эшелонирования воздушных су-дов, осуществляющих полеты по правилам полетов по при-борам. Применительно к диспетчерам подхода здесь изло-жены лишь те дополнительные меры, которые имеютотношение к выполнению одновременных операций на па-раллельных ВПП.
6.1.2 Если рассматривается вопрос о параллельных за-ходах на посадку, в план обучения следует включить под-готовку на тренажере, чтобы научить диспетчеров осуще-ствлять наблюдение, определять факт отклонениявоздушного судна от курса и реагировать на ситуацию.
6.1.3 Обучение следует предусмотреть в плане подго-товки диспетчеров подразделения, и приобретенный имитребуемый уровень знаний и навыков должен быть удов-летворительным образом продемонстрирован компетент-ному полномочному органу.
6.1.4 Обучение нужно подразделить на две категории:обучение диспетчеров подхода и обучение диспетчероваэродрома.
6.2 ОБУЧЕНИЕ ДИСПЕТЧЕРОВ ПОДХОДА
Поскольку диспетчеры подхода уже обладают необхо-димой квалификацией для выполнения процедур как ра-диолокационного, так и нерадиолокационного управления,их дополнительное обучение должно заключаться в сле-дующем:
a) разъяснение дополнений и изменений процедур идоговоренностей между диспетчерским пунктомподхода и аэродромным диспетчерским пунктом;
b) обучение обеспечению вертикального эшелониро-вания для воздушного судна, находящегося на уда-
лении не менее 19 км (10 м. миль) от порога ВПП вNOZ и стабилизировавшегося на курсе КРМ ILSи/или на линии пути MLS последнего этапа заходана посадку;
c) обучение управлению заходами на посадку воз-душных судов в целях удерживания их в границахNOZ и недопущения их входа в NTZ;
d) обучение действиям в случае отклонения воздуш-ных судов от курса КРМ ILS и/или от линии путиMLS последнего этапа захода на посадку; и
e) обучение процедурам управления в случае уходана второй круг.
6.3 ОБУЧЕНИЕ ДИСПЕТЧЕРОВ АЭРОДРОМА
Диспетчеры аэродромных диспетчерских пунктов нааэродромах, где предполагается ввести одновременныезаходы на посадку и вылеты на параллельных ВПП, могутв ограниченном объеме осуществлять эшелонированиевоздушных судов, выполняющих полеты по ППП. Поэто-му они должны пройти подготовку по некоторым или повсем перечисленным ниже дисциплинам:
a) основы теории радиолокации;
b) эксплуатация, выставка и юстировка радиолокаци-онного оборудования, используемого данным под-разделением;
c) опознавание воздушных судов;
d) минимумы радиолокационного эшелонирования иих применение;
e) нормативы высоты пролета над местностью;
f) обеспечение радиолокационного наведения и по-лучения информации, включая:
1) положения о том, когда можно или необходимоиспользовать наведение;
6-1

6-2Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
2) методы наведения воздушных судов; и
3) условия прекращения наведения;
g) необходимые действия в случае отказа радиолокаци-онного оборудования или средств связи, в том числе:
1) процедуры на случай отказа средств связи«земля - воздух»; и
2) процедуры на случай отказа средств связи прирадиолокационном наведении;
h) необходимые действия и команды на случай уходана второй круг; и
i) условия и применение процедур и договоренностеймежду диспетчерским пунктом подхода и аэро-дромным диспетчерским пунктом. В частности,диспетчеры обязаны знать положения, регламенти-рующие выдачу разрешений на последовательныевылеты по ППП (где это практикуется) и на неза-висимые параллельные вылеты с привязкой к при-бывающим воздушным судам (включая воздушныесуда, выполняющие уход на второй круг).
Глава 7
ВВЕДЕНИЕ ОДНОВРЕМЕННЫХ ОПЕРАЦИЙ
7.1 ИСПЫТАТЕЛЬНЫЙ ПЕРИОД
7.1.1 Решение о введении независимых или зависимыхопераций на параллельных или почти параллельных ВППследует принимать только после испытательного и озна-комительного периода, в течение которого должно бытьполучено обоснованное подтверждение тому, что все эле-менты, такие, как наземное оборудование, подготовка пер-сонала и процедуры УВД, должным образом интегрирова-ны в единую систему.
7.1.2 Испытания должны контролироваться группой, всостав которой должны входить эксперты по ОВД, предста-вители эксплуатантов и ведомств аэропорта. На протяжениииспытательного периода следует выполнить достаточноеколичество заходов на посадку в различных условиях, что-бы группа контроля смогла оценить уровень риска непред-намеренного входа воздушного судна в NTZ и способностьоргана УВД адекватно реагировать на такую ситуацию.Например, в ходе испытаний нужно выполнить ряд опера-ций в неблагоприятных метеорологических условиях (боко-вой ветер) для оценки умения персонала УВД справляться свозникающими отклонениями воздушных судов от курса.За испытательный период необходимо также определитьспособность персонала УВД устанавливать и выдерживатьтребуемые минимумы радиолокационного эшелонированияпри управлении выполняемыми операциями в различныхметеорологических условиях.
7.1.3 В течение испытательного периода целесообраз-но оговорить допустимые метеорологические условия дляпервого этапа испытаний, чтобы пилот мог действовать попринципу «вижу и избегаю». Если испытания проходятуспешно, то с соблюдением должной осторожности требо-вания по метеоусловиям необходимо постепенно снижать.
7.2 ВВЕДЕНИЕ ОДНОВРЕМЕННЫХ ОПЕРАЦИЙ
7.2.1 Прежде чем вводить в практику операции на па-раллельных оборудованных ВПП, необходимо убедиться,что соблюдаются следующие требования:
a) соответствующие ВПП должным образомоборудованы;
b) определены и испытаны процедуры для выполне-ния таких операций; и
c) местные пункты УВД оснащены необходимымоборудованием, а персонал прошел надлежащуюподготовку.
7.2.2 Информация о процедуре должна распространять-ся в виде сообщений за период продолжительностью 56 сутчерез систему AIRAC и содержать следующие элементы:
a) данные об используемых ВПП и характеристики ихоборудования ILS или MLS (частота, критерииопознавания, категория);
b) общее описание использования ВПП;
c) периоды предоставления ВПП для данных опе-раций;
d) специальный статус (например, в процессе испы-таний, с ограничениями по метеоусловиям, еслитаковые установлены);
e) описание NOZ и NTZ (только при проведении не-зависимых параллельных заходов на посадку);
f) требования к бортовому оборудованию; и
g) описание процедур, включая радиолокационныйконтроль, процедуру ухода на второй круг и кон-сультативные и корректирующие действия УВД вотношении одного или обоих воздушных судов,когда отмечается, что воздушное судно отступаетот курса КРМ ILS и/или от линии пути MLS конеч-ного этапа захода на посадку, приближается к гра-нице NOZ или входит в пределы NTZ.
Примечание. При проведении независимых па-раллельных заходов на посадку особое внимание
7-1

7-2Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
следует уделять уровням пересечения с глиссаднойтраекторией ILS и/или с посадочной траекториейпо углу места радиостанции MLS (определяя «вы-сокий» и «низкий» уровни), а также требованию овыдерживании этих уровней до тех пор, пока воз-душное судно не стабилизируется на траектории,задаваемой курсовым/глиссадным радиомаякомILS, и/или на траектории последнего этапа заходана посадку/посадочной траектории по углу местарадиостанции MLS.
7.2.3 Соответствующий орган ОВД должен предо-ставлять информацию и указания пилотам, относящиеся квыбранному типу(ам) операций с использованием парал-лельных или почти параллельных оборудованных ВПП.
Информация о типах одновременных операций, выбран-ных по результатам испытаний, должна включаться всборник аэронавигационной информации (АИП).
7.2.4 Карты захода на посадку по приборам для ВПП,на которых разрешается выполнение одновременных за-ходов на посадку, должны содержать примечание, в кото-ром указываются используемые для этого ВПП и оговари-вается, относятся ли они к типу «близко расположенныхдруг от друга параллельных ВПП».
7.2.5 В сообщения ATIS следует включать информа-цию о выполнении независимых параллельных заходов напосадку или независимых вылетов с указанием используе-мых для этого параллельных ВПП.

Добавление А
ВЫСОКОТОЧНОЕ ПОСАДОЧНОЕ ОБОРУДОВАНИЕИ ОБЕСПЕЧЕНИЕ БЕЗОПАСНОСТИ ПРИ НЕЗАВИСИМЫХ
ПАРАЛЛЕЛЬНЫХ ЗАХОДАХ НА ПОСАДКУНА РАСПОЛОЖЕННЫЕ БЛИЗКО ДРУГ К ДРУГУ
ПАРАЛЛЕЛЬНЫЕ ОБОРУДОВАННЫЕ ВПП
1. ВЫСОКОТОЧНОЕ ПОСАДОЧНОЕОБОРУДОВАНИЕ (PRM)
1.1 Теоретические исследования показали, что совре-менные радиолокационные системы и технологии радио-локационного отображения могут успешно применятьсяпри осуществлении одновременных операций на близкорасположенных друг к другу параллельных оборудован-ных ВПП. Чтобы подтвердить целесообразность введенияодновременных операций, была инициирована программапо демонстрации действия современных датчиков обзорадля высокоточного посадочного оборудования ВПП. Ис-пользование на практике нового оборудования и вновьразработанных процедур были продемонстрированы вдвух международных аэропортах, имеющих параллельныеВПП, расстояния между осевыми линиями которых со-ставляют соответственно 1035 м (3400 фут) и 1065 м(3500 фут). При проведении этих демонстраций ставиласьцель определить осуществимость и предварительные тре-бования к введению независимых параллельных заходовна посадку по приборам в аэропортах, где имеющиеся па-раллельные ВПП в режиме IMC используются недоста-точно эффективно из-за близкого расстояния между ними.
1.2 Программа демонстрации работы высокоточногопосадочного оборудования ВПП (PRM) подразделялась натри основных направления:
a) подтверждение правильности выбранной кон-цепции, включая доводку и испытание двухопытных технологических образцов высокоточ-ного посадочного оборудования ВПП с цельюопределения целесообразности его практическо-го использования;
b) проведение демонстрационных одновременныхопераций, предоставляющих возможность дис-петчерам УВД, представителям авиационной про-мышленности и пилотам наблюдать на делеработу высокоточного посадочного оборудованияВПП; и
с) оценка рабочих характеристик высокоточного по-садочного оборудования ВПП для определения егоэффективности.
1.3 В целях поддержки концепции уменьшения по-требного расстояния между параллельными ВПП был сде-лан вывод о необходимости осуществить ряд техническихусовершенствований, а именно: повысить точность поазимуту и скорость обновления информации вторичногообзорного радиолокатора, использовать дисплеи с болеевысокой разрешающей способностью и автоматическиесистемы предупредительной сигнализации отклонениявоздушного судна от курса. В процессе работы по концеп-туальному направлению были установлены и испытаныопытные образцы двух предлагаемых систем вторичногообзорного радиолокатора (ВОРЛ). Первый - радиолокаторкругового обзора, имевший антенную решетку с электрон-ным сканированием луча, - обеспечивал точность по ази-муту, равную 0,06° (1 о) с периодом обновления информа-ции не более 0,5 с. Азимутальная точность второгопредлагаемого радиолокатора на базе наземного запросчи-ка, работающего в режиме S, была такой же. У сущест-вующего вторичного радиолокатора с одной антеннойкругового обзора период обновления информации состав-лял 4,8 с. В ходе демонстрационной программы позадиимевшейся антенны была дополнительно установлена вто-рая антенна ВОРЛ, что обеспечило сокращение периодаобновления информации о текущем местоположении воз-душного судна до 2,4 с.
1.4 В процессе демонстрационной программы, в целяхподтверждения правильности концепции, использовалсяцветной дисплей с высокой разрешающей способностью,который позволил диспетчерам радиолокационного контро-ля подхода определять отклонение воздушного судна отосевой линии ВПП с погрешностью, не превышающей 30 м(98 фут). Помимо этого, система радиолокационного ото-бражения была снабжена предупредительной сигнализаци-ей, призванной сконцентрировать внимание диспетчера навероятном отклонении от курса прежде, чем воздушноесудно войдет в NTZ, ширина которой составляла 610 м
ДОБА-1

ДОБА-2Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
(2000 фут) при расстоянии между осевыми линиями ВПП,равном 1035 м (3400 фут). Более того, система прогно-зировала местоположение каждого воздушного судна наближайшие 10 с. Если такой прогноз показывал, что втечение ближайших 10 с воздушное судно может оказать-ся в NTZ, вырабатывался предупредительный сигнал, врезультате чего символ воздушного судна на дисплее ра-диолокатора окрашивался в желтый цвет и срабатываласирена. В случае входа воздушного судна в NTZ выраба-тывался вторичный сигнал тревоги, и символ воздушногосудна на дисплее радиолокатора становился красным.Масштаб шкалы по оси, перпендикулярной направлениюВПП по сравнению с масштабом оси вдоль линии путизахода на посадку увеличивался в четыре раза. Благодаряэтому диспетчер радиолокационного контроля подходамог с более высокой точностью определять величину бо-кового отклонения воздушного судна от осевой линииВПП.
1.5 Для демонстрации одновременных операций ис-пользовались реальные полеты, проводимые непосредст-венно по программе испытаний, а также полнопилотажныетренажеры с отработкой заданных сценариев отклоненияот курса. Это дало возможность диспетчерам УВД, пред-ставителям авиационной промышленности и пилотам на-блюдать предлагаемое высокоточное посадочное оборудо-вание ВПП в работе и приобрести первоначальный опытего применения. По результатам анализа радиосвязи былиполучены данные для определения времени запаздываниясредств связи. Скорость реакции пилота и воздушногосудна измерялись на полнопилотажных тренажерах, ими-тирующих кабины воздушных судов типа В-727 и DC-10.
1.6 Оценка рабочих характеристик оборудования про-водилась с применением статистической модели рискастолкновения, разработанной по программе PRM. Длямодели использовались данные, накопленные в процессеосуществления программы, которые обеспечивали оценкувероятности разведения воздушных судов на дистанции неболее 150 м (500 фут) в случае нескорректированного от-клонения от курса. Модель имитировала большое количе-ство (100 000) разведений «в наихудшем варианте» (подуглом 30° с допущением, что только в 1% случаев пилотоказался бы не в состоянии выполнить команду диспетче-ра вернуться на курс осевой линии ВПП), и каждый разизмерялось минимальное расстояние между воздушнымисудами. Анализ результатов по используемой модели по-казал, что приблизительно в одном из 250 случаев «в наи-худшем варианте» отмеченная минимальная дистанцияразведения составила бы менее 150 м (500 фут). В сочета-нии с принимаемым в расчетах одним случаем отклоненияот курса «в наихудшем варианте» на 25 млн. заходов напосадку одно 30°-ное отклонение на 1000 или большееколичество парных параллельных независимых заходов напосадку можно было бы считать допустимым.
1.7 Основные технические характеристики высоко-точного посадочного оборудования ВПП приведены в таб-лице А-1.
2. ИСТОРИЯ ПРОБЛЕМОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ
2.1 Техническая ошибка при полетах с применением ILSили MLS. Собран значительный объем информации, касаю-щейся количества суммарных ошибок навигационных сис-тем (т. е. усредненного отклонения воздушных судов от про-должения средней линии ВПП), главным образом нарасстоянии, не превышающем 19 км (10 м. миль) от порогаВПП. Сделано заключение, что если обеспечивается верти-кальное эшелонирование воздушных судов, по крайней мерев пределах 19 км (10 м. миль) от порога ВПП, то количествотаких ошибок при независимых параллельных заходах напосадку остается на приемлемом уровне. Проведен сборинформации по количеству суммарных ошибок навигацион-ных систем при полетах по ППП, когда линия пути воздуш-ного судна отслеживается на весьма далеком расстоянии отпорога ВПП, доходящем до 74 км (40 м. миль). Найдено, чтоколичество упомянутых ошибок увеличивается с дально-стью и что диспетчерам радиолокационного контроля под-хода, возможно, приходится вмешиваться, чтобы минимизи-ровать срывы при проведении операций. Безопасность иуспех проведения независимых заходов на посадку на близ-ко расположенные друг от друга параллельные ВПП нахо-дятся в критической зависимости от способности воздушныхсудов точно выдерживать курс КРМ ILS или линию путиMLS на окончательном этапе захода на посадку. Очевидно,что завышенные величины допустимого отклонения от кур-са создадут угрозу воздушному судну, выполняющему заходна посадку на соседнюю ВПП, с другой стороны, занижениеэтих величин может привести к неприемлемому количествуложных срабатываний предупредительной сигнализации и,как следствие, повлияет на четкость хода проведения опера-ций. Измерение величин отклонений воздушных судов откурса КРМ ILS или от линии пути MLS на окончательномэтапе захода на посадку имеет критическое значение и дляразработки процедур одновременных операций.
2.2 Средства связи. Диспетчер радиолокационногоконтроля подхода обладает правом внеочередного уста-новления связи во время работы передатчика воздушногосудна. Принимая это во внимание, при составлении стати-стической модели риска столкновения в трех крупныхаэропортах были записаны все переговоры диспетчеров своздушными судами во время проведения полетов в ме-теорологических условиях, допускающих полеты по при-борам. Анализ показал, что ситуации блокирования пере-дачи возникали бы только в 4% случаев отклонения откурса «в наихудшем варианте» и поэтому не повлияли бына результаты расчетов общего риска, на которых основа-ны критерии проведения одновременных операций. Веро-ятность отказа средства связи вследствие западания кноп-ки микрофонов на обеих частотах, совпадающего вовремени с 30с-ным отклонением от курса, представляетсячрезвычайно незначительной. Сочетание блокированиясвязи с фактом необходимости разведения воздушныхсудов, расстояние между которыми сократилось всего до150 м (500 фут) или менее в процессе проведения одно-временных операций, ожидается не более чем в одном
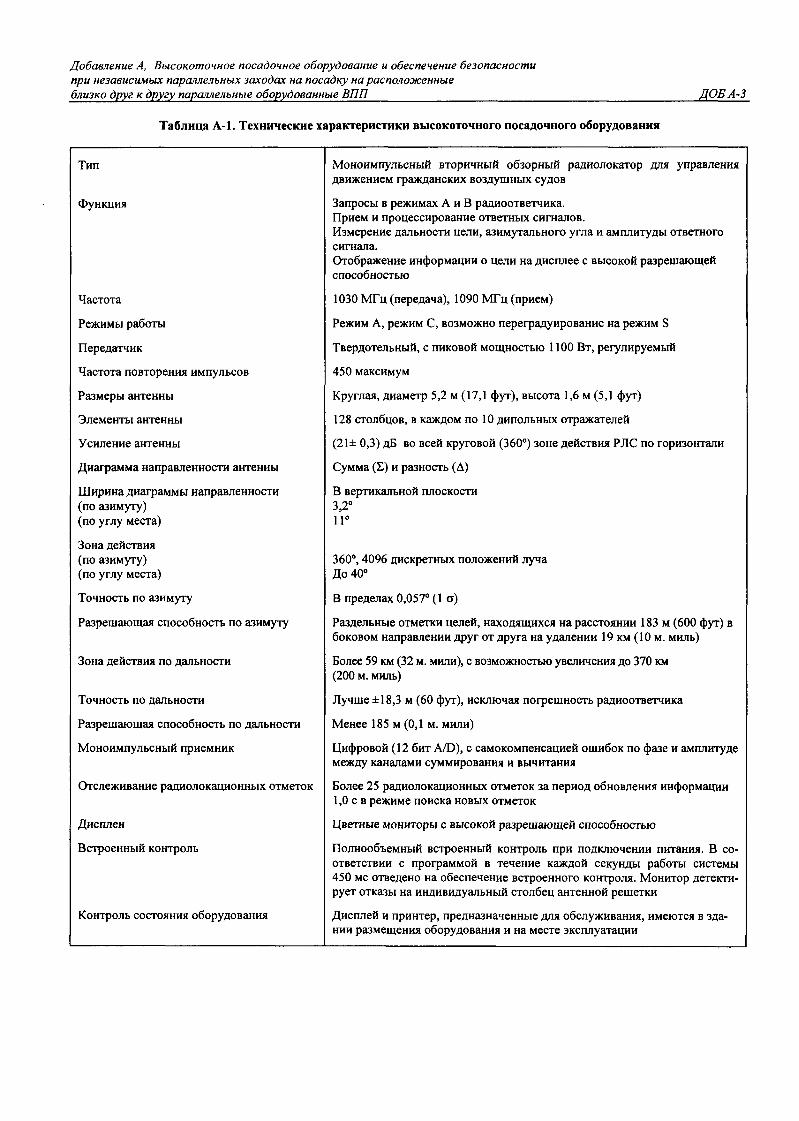
Добавление А, Высокоточное посадочное оборудование и обеспечение безопасностипри независимых параллельных заходах на посадку на расположенныеблизко друг к другу параллельные оборудованные ВПП ДОБА-3
Таблица А-1. Технические характеристики высокоточного посадочного оборудования
Тип
Функция
Частота
Режимы работы
Передатчик
Частота повторения импульсов
Размеры антенны
Элементы антенны
Усиление антенны
Диаграмма направленности антенны
Ширина диаграммы направленности(по азимуту)(по углу места)
Зона действия(по азимуту)(по углу места)
Точность по азимуту
Разрешающая способность по азимуту
Зона действия по дальности
Точность по дальности
Разрешающая способность по дальности
Моноимпульсный приемник
Отслеживание радиолокационных отметок
Дисплеи
Встроенный контроль
Контроль состояния оборудования
Моноимпульсный вторичный обзорный радиолокатор для управлениядвижением гражданских воздушных судов
Запросы в режимах А и В радиоответчика.Прием и процессирование ответных сигналов.Измерение дальности цели, азимутального угла и амплитуды ответногосигнала.Отображение информации о цели на дисплее с высокой разрешающейспособностью
1030 МГц (передача), 1090 МГц (прием)
Режим А, режим С, возможно переградуирование на режим S
Твердотельный, с пиковой мощностью 1100 Вт, регулируемый
450 максимум
Круглая, диаметр 5,2 м (17,1 фут), высота 1,6 м (5,1 фут)
128 столбцов, в каждом по 10 дипольных отражателей
(21± 0,3) дБ во всей круговой (360°) зоне действия РЛС по горизонтали
Сумма (S) и разность (Д)
В вертикальной плоскости3,2°11°
360°, 4096 дискретных положений лучаДо 40°
В пределах 0,057° (1 о)
Раздельные отметки целей, находящихся на расстоянии 183 м (600 фут) вбоковом направлении друг от друга на удалении 19 км (10 м. миль)
Более 59 км (32 м. мили), с возможностью увеличения до 370 км(200 м. миль)
Лучше ±18,3 м (60 фут), исключая погрешность радиоответчика
Менее 185 м (0,1 м. мили)
Цифровой (12 бит AID), с самокомпенсацией ошибок по фазе и амплитудемежду каналами суммирования и вычитания
Более 25 радиолокационных отметок за период обновления информации1,0 с в режиме поиска новых отметок
Цветные мониторы с высокой разрешающей способностью
Полнообъемный встроенный контроль при подключении питания. В со-ответствии с программой в течение каждой секунды работы системы450 мс отведено на обеспечение встроенного контроля. Монитор детекти-рует отказы на индивидуальный столбец антенной решетки
Дисплей и принтер, предназначенные для обслуживания, имеются в зда-нии размещения оборудования и на месте эксплуатации

ДОБА-4Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
случае из 1 400 000 000 одновременных заходов на посад-ку по приборам, т. е. выражается числом 7 * 10~>0.
2.3 Микроволновая система посадки (MLS) и новыетехнологии. MLS, используемая для прямых заходов на по-садку, обеспечивает по крайней мере такую же системнуюточность, что и ILS кат. I. Поэтому результаты оценки ин-формации о количестве суммарных технических ошибокнавигационной системы при использовании ILS вполнеприменимы к анализу заходов на посадку, выполняемых посигналам MLS. С учетом появления новых технологий вразработке средств обеспечения заходов на посадку с высо-кой точностью, включая всемирную систему спутниковойнавигации (GNSS), проводятся исследования по оценке ис-пользования таких средств в целях поддержки одновремен-ных инструментальных операций на параллельных ВПП,расположенных близко друг к другу.
2.4 Необоснованные отвороты. Под необоснованнымотворотом подразумевается ситуация, когда диспетчеррадиолокационного контроля подхода инициировал отво-рот, а отклонившееся от курса воздушное судно послеэтого остается в пределах зоны нормальных полетов. Та-кая ситуация может возникнуть, когда воздушное судноведет себя так, как будто ожидается нарушение им грани-цы NTZ, и срабатывает предупредительная сигнализацияPRM, но после этого воздушное судно завершает заход напосадку, не заходя в NTZ. Если случаи необоснованныхотворотов регистрируются часто, то система расценивает-ся как генерирующая слишком много ложных срабатыва-ний. Поданному сигналу тревоги могут не поверить, чтоприведет к угрозе безопасности полета. Кроме этого, не-обоснованные отвороты уменьшают эффективность целей,достигнутых введением независимых параллельных захо-дов на посадку по приборам.

Добавление В
ПРИМЕР РАЗМЕЩЕНИЯ ВПП И ПРОЦЕДУРЫ УВД,ИСПОЛЬЗУЕМЫЕ ВО ФРАНЦИИ
1. КОНФИГУРАЦИЯ ВПП
Одновременные операции на почти параллельныхВПП выполняются в парижском аэропорту Орли (Фран-ция). ВПП обозначены под индексами 07/25 и 08/26 соот-ветственно и ориентированы, как показано на рис. В-1,
2. ОПЕРАЦИИ
2.1 Две ВПП 07/25 и 08/26, угол схождения которыхсоставляет 13°, используются для выполнения раздельныхнезависимых операций:
- в восточном направлении: 07 для посадок, 08 длявзлета;
- в западном направлении: 26 для посадок, 25 длявзлета.
2.2 Для вылетов в восточном направлении (07/08) двеВПП рассматриваются как независимые, поскольку угол
расхождения создает естественное боковое эшелонирова-ние (см. рис. В-2).
2.3 При использовании ВПП в западном направлении(25/26) возникает определенная зависимость, посколькуВПП сходятся. Необходимо обеспечивать надлежащееэшелонирование воздушного судна, вылетающего с ВПП25, и воздушного судна, уходящего на второй круг сВПП 26 (см. рис. В-3). При благоприятных метеоро-логических условиях эти две ВПП эксплуатируются какнезависимые, поскольку на начальном этапе ухода навторой круг может поддерживаться визуальный контакт своздушным судном, выполняющим взлет со второй ВПП.При погодных условиях, когда видимость сокращаетсядо 2000 м (6500 фут) и менее и/или нижняя границаоблаков опускается ниже 150 м (500 фут), если наудалении 3,7 км (2,0 м. мили) от порога ВПП находитсявоздушное судно, выполняющее заход на посадку,разрешение на взлет не дается до тех пор, пока диспетчерне убедится в том, что уход на второй круг не произой-дет.
Рис. В-1. Одновременные операции на почти параллельных ВПП
ДОБВ-1

ДОБВ-2Руководство по одновременному использованию
параллельных или почти параллельных оборудованных ВПП (SOIR)
г 066°
087°
Примечание. Отклонение в 8" от направления залегания одной из ВПП используется для уменьшения шума иулучшения эшелонирования при вылете.
Рис. В-2. Вылеты в восточном направлении (независимые ВПП)
Рис. В-3. Вылеты в западном направлении (сходящиеся ВПП)
— КОНЕЦ —





























