-
8/10/2019 Root Locus Explanation
1/24
1
Root Locus Analysis
Root Locus Analysis
The transient response of a closed-loop system is completely
determined by the location in the s-plane of the closed-loop
system poles and zeros. This shows if the system is stable
and
also whether there is any oscillatory behaviour in the time
response. Therefore, it is worthwhile to determine how the
roots of the characteristic equation as a system parameter
is
varied. The root locus method is proposed byEvans in 1948.
It is a graphical method for system analysis and design
-
8/10/2019 Root Locus Explanation
2/24
2
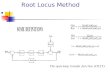
Root Locus Concept
G(s)+
-
E(s)R(s)k
Y(s)
C(s)
1
)(
)()(
1
1
sD
sNsG =
)(
)()(
2
2
sD
sNsC =
)()()()(
)()(
)()(1
)()()(
2121
21
sDsDsNskN
sNsN
sCskG
sCskGsT
+=
+=
-
8/10/2019 Root Locus Explanation
3/24
-
8/10/2019 Root Locus Explanation
4/24
4
Root Locus Construction1. Loci branch
The branches of the locus are continuous
curves that start at each of n poles of G(s)C(s),
for k > 0. As k + , the locus branches
approach the m zeros of G(s)C(s). Locus
branches for excess poles extend infinitely farfrom the origin;
for excess zeros, locus segment
extends from infinity.
Example
Consider)84)(2(
)1()()(
2 +++
+=
sss
ssCsG , the corresponding
root locus branch, for k = [0, 10] are shown below.
-8 -6 -4 -2 0-4
-3
-2
-1
0
1
2
3
4
-
8/10/2019 Root Locus Explanation
5/24
5
2. Real-axis locus
The root locus on those portion of the real axis for which
the
sum of poles and zeros to the right is an odd(even) number,
fork> 0(for k< 0).
3. Locus end points
poles zeros (finite or infinite) for k
4. Asymptotes of locus as s
The angles of the asymptotes of the root locus branches,
which end at infinity, are given by:
asyr
n m=
+
( )1 2 180o, k> 0
asyr
n m=
2 180o, k < 0
Note:
For s ,
)(
)(
lim)()(lim
i
n
i
j
m
j
ssps
zs
ksCskG
=
n
m
s s
sk
)(
)(lim
mns s
k
=
)(lim
= -1 ks mn = )(
zrmn
rjks mn
++= ),
)12(exp(
1
})arg{()21(180}arg{ mnsrk =+= o
= +( ) arg{ } ( )n m s r 180 1 2o
Therefore, asyr
n m=
+
( )1 2 180o, for k> 0.
-
8/10/2019 Root Locus Explanation
6/24
6
Example
Consider the following system
+
-
E(s)R(s) Y(s)
s(s+2)
k
1
kG s k
s s
( )
( )
=
+ 2T s
k
s s k
( )=
+ +2
2
The poles of T(s) the roots of s2+ 2s+ k= 0
1 1 k
For k 1 , the roots are real within [-1, 0].
For k > 1, the roots are complex conjugates
with real part = -1.
-3 -2 -1 0 1-2
-1
0
1
2
1
2
1 2 180+ = o (phase Condition)
-
8/10/2019 Root Locus Explanation
7/24
7
Since
By polynomial parameter comparison, the
common point at which all asymptotes intercept the
real axis is given by
=
==
Re( ) Re( )p z
n m
i j
j
m
i
n
11, 2 mn
Note:A root locus branch may cross its asymptote.
zrmn
rjks mn
++= ),
)12(exp(
1
6. Break-away/ Break-in point on the real axis
The break-away point for the locus between two
poles on the real-axis occurs when the value of k is a
maximum. The break-in point for the locus between
two zeros on the real-axis occurs where the value k
is a minimum.
k= k=
k= 0k= 0
kmax
kmin
-
8/10/2019 Root Locus Explanation
8/24
8
)()()}()({ 1
sZsPsCsGk ==
k
s= 0
10
2Z s
P s dZ s
dsZ s
dP s
ds( )( )
( )( )
( )
=
(1)
(2) Find the roots of )]()([ sCskGds
d= 0
The roots of )]()([ sCskG
ds
d= 0 are the
break-in/break-away points for all k R
Formula:d
dsf f
d
dsf= ln
Hint:ds
df
ds
df
fff
ds
df ==
1ln
=
=
)()(ln
)()(
)()()]()([
sPsZ
dsd
sPsZ
sPsZ
dsdsHskG
dsd
=
ds
sdP
sPds
sdZ
sZsP
sZ )(
)(
1)(
)(
1
)(
)(
=
ds
sdPsZ
ds
sdZsP
sP
)()(
)()(
)(
12
-
8/10/2019 Root Locus Explanation
9/24
9
ExampleConsider
ss
sksCskG
)2(
)4()()(
+
+= . Using the formula above,
it is obtained that1
4
1 1
2s s s+ = +
+ s = -6.83, or -1.17
-10 -8 -6 -4 -2 0-3
-2
-1
0
1
2
3
-6.83
-1.17
K > 0
-5 0 5-5
0
5
K < 0
-
8/10/2019 Root Locus Explanation
10/24
10
7. Angles of departure and approachThe angle of departuredof a
locus branch from a complex pole is given by
=
ionconsideratunderpolethetotoanglezero)()(+
ionconsideratunderpolethetotoanglepole)()(other180
sCsG
sCsGdo
The angle of approachaof a locus branch from a complex zero is
given by
o180
ionconsideratunderpolethetotoanglezero)()(other
ionconsideratunderpolethetotoanglepole)()(
=
sCsG
sCsGa
Example
-4 -3 -2 -1 0-2
-1
0
1
2
210
120
90
o
ooo
210
12090180
=
+=d
o
ooo
180
18000
=
=a
-
8/10/2019 Root Locus Explanation
11/24
11
Imaginary axis crossing point
The value of k that cause a change of sign in the
Routh Array, is that value for which the locus crosses
into the right half s-plane.
Note:
point of crossover s xj= =phase 180o .
Example
Consider)2)(1(
6)()(
++=
sss
ksCskG . The Routh array for
the unity-feedback closed-loop system is
s3 1 2
s2 3 6k
s1
2 - 2k
s0
6k
1= k 063 2 =+ s
js 2=
-
8/10/2019 Root Locus Explanation
12/24
12
Non-intersection or intersection of root locus branches
The angle between two adjacent approaching branches is
=
360o
where denotes the number of branches
approaching and leaving the intersection point.
The angle between a branch leaving and an
adjacent branch that is approaching the samepoint is given
by
=
180o
Example
-4 -3 -2 -1 0-2
-1
0
1
2
leaving branch
approaching branch
= 180
= 90
-
8/10/2019 Root Locus Explanation
13/24
13
Grants Rule
For system rank 2, Grants rule state that the sum o
the (unity-feedback) closed-loop system poles is equal
to the sum of the open-loop system poles.
Note:
P s kZ s( ) ( )+ = 0
s a s a s a s an nn
n
n+ + + + + =
1
1
2
2
1 0 0LL ,
where an1 is independent of kalso
an = 1 poles
-
8/10/2019 Root Locus Explanation
14/24
14
Example
Plot the unity feedback closed-loop root locus for
)2)(1(
1)()(
++=
ssssHsG
Solution
1. Open loop poles are : 0-1-2
Number of root-locus : 3Root locus on the real axis ]2,( and
]0,1[
2. Asymptotes of locus as s
3
)12(
+=
kk
k=0,1,2
Centroid of the asymptotes
1
3
)2()1(0=
++=
3. Imaginary axis crossing point
The characteristic equation is
0)2)(1( =+++ Ksss 023 23 =+++ Ksss
and the corresponding Routh table is
-
8/10/2019 Root Locus Explanation
15/24
-
8/10/2019 Root Locus Explanation
16/24
16
ExamplePlot the root locus for the system with
)22)(2(
1)()(
2 +++
+=
sss
ssHsG
Solution:
1. Open-loop poles : j 1,2 open-loop zero: -1
Number of the locus branches : 3
Locus on the real axis ]1,2[
2. Asymptotes of locus as s
213
)12(
=
+=
kk
Centroid of the asymptotes
2
3
13
)1()1()1()2(=
+++=
jj
3. Angle of deparatured
)12()( 21 +=++ kdppz
)12(4
+= kd
For 4
3,1 d ==k
-
8/10/2019 Root Locus Explanation
17/24
17
Example
Consider the system with
)1(
1)()(
+=
sssHsG
Plot the root locus of the following cases.
(i)with additional pole at 2
(ii)with additional zero at -2
-
8/10/2019 Root Locus Explanation
18/24
18
Root locus without additional pole and zero
Additional pole
Root locus with additional pole -2
-
8/10/2019 Root Locus Explanation
19/24
19
Additional zero
Root locus with additional zero -2
Example
)1(
)1()(
2
2
+
+=
ss
sKsG
Consider a negative unity feedback system has a
plant transfer function
(a) Sketch the root locus for K > 0. (b) Find thegain K when
two complex roots have a damping
ratio and calculate all three roots. (c)
Find the entry point (break-in point) of the root
locus at the real axis.
707.0=
-
8/10/2019 Root Locus Explanation
20/24
20
j
K
sss
ssKsKKss
sssKs
n
nnnn
nn
22,5723.0:Roots
5723.0
619.4
87.2
matchingtsCoefficien
0)414.1()414.1(
0)2)((0)12(
0)1()1()(
1Method
2223
2223
22
=
=
=
=+++++
=+++=++++
=+++=
Matlabby96.196.1,58.0:Roots j
967.1967.1,584.0:Roots j
584.0
07382.7)934.37382.7()934.3(
0)7382.7934.3)((0518.4)1518.42(518.4
518.4
1967.2967.1967.1967.1)967.1967.0(
)967.1967.0()967.1967.0(
condition,magnitudeFrom
1.967j1.967-arerootsconjugatethe1.967x
-45180/*1)))-(x/(xtan*2-1)/x)+((xtan+1)/x)-((x(tan
2r)180(1135))x
1x(tan180)
x
1x(tan(180)
1x
xtan2(180
2Method
23
223
222222
2222
1-1-1-
111
=
=+++++
=+++=++++
=
=+++
++
=
=
+=++
+
sss
ssssss
K
K
-
8/10/2019 Root Locus Explanation
21/24
21
Conclusions
(1). The system will tend to be unstable with additional
poles
(increasing the system rank).
(2). The system will tend to be stable with additional
zeros.
In many design exercises, zeros can be introduced to
attractclosed-loop poles and alter the root locus location. It
is
also very useful to applied stable pole-zero cancellation
for improving system performance.
-
8/10/2019 Root Locus Explanation
22/24
22
Exercise 1
-10 -8 -6 -4 -2 0
-20
-10
0
10
20
-2.5
)10(
)5()()(
2 +
+=
ss
sksCskG
Exercise 2
-
8/10/2019 Root Locus Explanation
23/24
23
Exercise 3
Exercise 4
-
8/10/2019 Root Locus Explanation
24/24
Control System Design by
Root Locus Method
1. Determine the desired dominant pole locations using the
performance requirements.
2 . Calculate the phase of the desired pole location
corresponding to the uncompensated system G(s), and
determined the required phase change.
3. Determine the pole and zero of the compensator C(s), such
that the phase of the desired pole location corresponding to
the compensated system is 180.
4. Determine the value of K, such that
is satisfied.
5. Confirm the result by time domain simulation.
1)()( =sCsKG