Embed Size (px)
Citation preview

8/13/2019 Robustness of Continuous-time Adaptive Control Algorithms Inthe Presence of Unmodelede Dynamics
http://slidepdf.com/reader/full/robustness-of-continuous-time-adaptive-control-algorithms-inthe-presence-of 1/9
TRANSACTIONS ON AUTOMATIC CONTROL, VOL.C-30,O. 9, SEPTEMBER985 88 1
l Notes and Correspondence
Note to he Reader:The following paper has spurred much discussion
the adaptive controls communityor a numberof years now. Becauseof
subsequent esearch it generated, acommentarywas elt to be
ate. Hen?, at the end of this paper, read on for some insight
by Karl Astrom.
RAY DECARLO
Robustness of Continuous-Time Adaptive ControlAlgorithms in the Presence of Unmodeled Dynamics
E. ROHRS,ENAALAVANI,ICHAEL
ATHANS, A N D GUNTER STEIN
Abstruct-This paper examines the robustness properties of existing
hms to unmodeled plant high-frequency dynamicsrable output disturbances. I t is demonstrated that there exist
dynamic ystemwhich
and parameter errors. The
of the existence of such infiite-gain operators is
1) sinusoidal eference inputs at specific requencies and/or 2)
idal output disturbances at any frequency (including de),can cause
gain to increase without bound, thereby exciting the unmodeled
dynamics, and yielding an unstable control system.is concluded that existing adaptive control algorithms as they
presented in the literature referenced in this paper, cannot be used
nce in practid designs where the plant contains unmodeled
instability is likely to result. Further understanding isto ascertain how the currently mplemented adaptive systems
the^ theoretical ystems tudiedhere and how further
I. INTRODUCTION
This paper reports the outcome of an investigation of the stability andhe
of unmodeled high-frequency dynamics and persistent unmea-output disturbances. Every physical system has such (parasitic)
the cross-
frequency and require the control system to contain adequate gainAlso, every control system mustbe able to operate in
unstable. In nonadaptive linear controldesigns the presence of
upon the closed-loop stability issue.
It should be stressed that he existing adaptive control algorithms, whento control an unknown linear time-invariant plant, result in a highly
andime-varying losed-loop ystemwhose tabilitydoes
he external inputs (reference inputs and disturbance inputs).the stability of the adaptive closed-loop
Transactions Editorial B oard. This work was supported byNASA Ames andManuscript received May IO 1983; revised December 10, 1984. Paper recommended
rch Centers under GrantNASAlNGL-22-009-124, by the Office of NavalGrantONRIN00014-82-K4582 h’R 606-003). and by theNational
e Foundation under Grants NSFIECS-8210960 and NSFIECS-8206195.C. E. Rohrs is with he Department of Electrical Engineering, University of Notre
otre Dame, IN 46556 and Tellabs Research Laboratory, South Bend. IN 46635.
L. Valavani, M.Athans, and G. Stein are with the Laboratory for Information andof Tecbnology , Cambridge, MA 02139.
design and to inquire about its global tabilityproperties. This has
provided the motivztion for the research reported in this paper.
Due to space limitationswecannotpossiblyprovide n hispaper
analyticalandsimulationevidenceofallconclusionsoutlined n the
Abstract. Rather, we summarize the basic approach only or a single classof continuous-time algorithms that ncludes hose of Monopoli [14],
Narendra and Valavani [l ], and Feuer and Morse [2]. However, the same
analysis techniqueshave been used to analyze more complex classes of1)
continuous-time adaptive control algorithms due to Narendra, Lin, and
Valavani [3], both algorithms suggested by Morse [4], and the algorithms
suggested by Egardt qwhich include those of Landau and Silveira [6],
and Kreisselmeier [19]: and (2) discrete-time adaptive control algorithmsdue to Narendra and Lin [22], Goodwin, Ramadge, and Caines [5] (the
so-called dead-beatcontrollers), and thos t developed nEgardt [ l q ,
which include the self-tuning regulator of Astrom and Wittenmark [181
and that due to Landau [20]. The thesis by Rohrs [151 contains the full
analysis and simulation results for the above classes of existing adaptive
The end of the 1970’s marked significant progress in the theory of
adaptive control, both in t e r n of obtaining global asymptotic stability
proofs [1]-[7 as well as inunifying diverse adaptivealgorithms, the
derivation of which was based on different philosophical viewpoints [8],
Unfortunately, the stabilityproofs of all these algorithmshave n
common a very restrictive assumption. For continuous-time implementa-
tion thii assumption is that the number of poles minus the number of zeros
of the plant, i .e. , its relative degree, is known. The counterpart of thisassumption for the discrete-time systems is that the pure delay inhe plant
is exactly an integer number of sampling periods and that thii integer is
known. It is also assumed that an upp r bound for the number of poles in
the lant is known in both the continuous-time nd iscrete-time
formulation. Finally, global parameter convergence equires hat the
inputs satisfy a “sufficiently rich” condition.
The restrictiverelative degree assumption, n turn, isequivalent to
enabling the designer to realize for an adaptive algorithm, a positive real
error transfer function, on which all stability proofs have heavily hingedto-date [8]. Positive realness implies that the phase of the system Cannotexceed 9 0 ” or all frequencies, while it is a well-known fact that models
of physical systems become very naccurate n describing actual planthigh-frequency phase characteristics. Moreover, for practical reasons,
most controller designs needto be based on models which do not contain
all of the plant dynamics, in order to keep the complexity of the required
adaptive compensator within bounds.
Motivated from such considerations, researchers inhe field inthe early1980’sbegan investigating the robustness of adaptive algorithmso violation
of the restrictive (and unrealistic) assumption of knowledge of the plant
order and its relative degree. Ioannou and Kokotovic [IO] obtained error
bounds fordaptivebselversnddentifiersnheresencefunmodeled dynamics, while such analytical results were harder to obtain
for reduced-order adaptive controllers. The first such result, obtained by
Rohrs et ai.11 11, consists of “linearization” of the error equations, under
the assumptionhat the overall ystemsntsinal pproach to
convergence. Ioannou and Kokotovic [12] later obtained ocal stability
results in the presence of unmodeled dynamics, and showed thathe speed
ratio of slow versus ast unmodeled)dynamicsdirectlyaffected the
stability region. Even he local stability results of [12]anonly be attained
when the speed ratio is small, i.e., when the unmodeled dynamics are
much faster than the modeledpartof the process. Earlier simulationstudies by Rohrs et al. [13] had already shown the high sensitivity of
adaptive algorithms to disturbances and unmodeled dynamics, generation
of high-frequency control inputs and ultimately instability. Simple root-
locus type plotsfor the linearized system n [ l I ] showed how he presenceof unmodeled dynamics could bring about nstability of the overall
algorithms.
191.
0018-9286/85 /0900-0881 01 .~ 985 IEEE

8/13/2019 Robustness of Continuous-time Adaptive Control Algorithms Inthe Presence of Unmodelede Dynamics
http://slidepdf.com/reader/full/robustness-of-continuous-time-adaptive-control-algorithms-inthe-presence-of 2/9
882 IEEE TRANSACTIONSN AUTOMATICONTROL, VOL.C-30,O. 9, SEPTEMBER 1985
system. It was also shown there that he generated frequencies n headaptive loop depend nonlinearly n the magnitudes of the reference input
and output. Kosut and Friedlander [23] have also tried to define the class
ofplantperturbationsunderwhich daptive ontrollerswilletainstability.Theyhave also found severe limitations as in [ l l ] , on the
reference input and output characteristics for which the linearized error
equations are stable.The main contribution of this paper is in showing that two operators
inherently present in all algorithms considered (aspart of the adaptation
mechanism) have infinite gain. As a result, two possible mechanisms ofinstability are isolated and discussed. It is argued that the destabilizing
effects in the presence of unmodeled dynamics can be attributedo either
phase (in the case ofigh-frequencynputs), or, primarilyain
considerations (in the case of unmeasurable output disturbances of any
frequency, including dc), which result in nonzero steady-state rrors. The
latter factsmost isconcertingor the performance f daptive
algorithms since t cannot be easily dealt with by additional filtering,givenhat ersistent isturbance fnyrequency can have
destabilizing effect.Our conclusion s hat the adaptivealgorithms as published n the
literature are likely to produceunstablecontrol ystems if they are
implemented on physical systems directly as they appear in the literature.
The conclusions stem from the results of this paper which show unstable
behavior of adaptive systems when these systemsre confronted with twopremises that cannot be ignored in any physical control design: 1 ) there
are always unmodeled dynamics at sufficiently high frequencies (andt is
futile to try to model these dynamics); and2) the plant cannot be isolatedfrom unknown disturbances (e.g., 60 Hz hum) even though thesemay be
small.The original version of this paper was presented as [24]. Since that
time, there has been a great deal of research generated on the robustnessissues raisedhere. In particular, ithas come to appear that some problems
presented in his paper may possibly be overcomeby sufficient excitation.The following idea of the usef sufficient excitation can e traced back at
least to [25]. By using sufficient excitation the nominal adaptive system
can be made exponentially stable. Sincehe system is exponentially stable
there is some modeling error and some disturbances for which stability
wll bemaintained. It shouldbenoted,however, hat heamount ofmodeling error or the amount of disturbance for which the adaptive
system can maintain stability may be extremely small.
The issue of sufficient excitation is ot considered here. It is a complex
issue which will roduce many papers of its wn. However, the following
results pertaining to sufficient excitation should be noted. Since the inputswhich cause destabilization n this paperactuallyprovide the usual
measure of sufficient excitation it is clear from these results that not just
sufficientexcitation sneededbysufficient ow-frequencyexcitation.
Ioannou and Kokotovic [lo] used the term “dominantly rich excitation”in their investigationof the concept. Since the publication of [24], Krause
ef ai. [26] have analyzed the infinitegainoperatormoredeeplyandextended the analysis of this paper n a significant way o nclude theeffects of the richness of input in the stability analysis. The results of the
analysis of [26] show that the input must not onlybe sufficiently exciting
to produce parameter convergence in the nominal system, but that theinputmustbedominantly ichenough to overcome the destabilizingeffects discussed here. Thus, sufficient excitation should not be viewedsa panacea which creates robust adaptive controllers but as a stabilizingeffect in a delicate engineering tradeoff.
In Section 11the infinite gain of the operators generic o the adaptationmechanism sdisplayed.Section III contains the developmentof wo
possible mechanisms or instability thatarise as a result of the infinite gain
operators. Simulation esults hat how hevalidityof heheuristic
arguments in Section ID are presented in Section IV. Section V containsthe conclusions.
n. THE ERRORMODEL. TRUCTURE FOR A REPRESENTATION
ADAPTIVE ALGORITHM
The simplestrototype for amodeleferencedaptiveontrolalgorithm in continuous-time has itsrigins to at east as far back as 1974,
in the paperbyMonopoli [141. This algorithmhasbeenproved
asymptotically stable only for the case when the relative degree of the
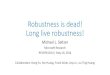
Model
Fig. 1. Controller structure of CA1 with additive output disturbance d(r ) .
plant is unity or at most two.The algorithms published by Narendra and
Valavani [ l ] and Feuer and Morse [2] reduce to the same algorithm for
the pertinent case. This algorithm will henceforth be referred to as CAI
(continuous-time algorithm No. 1).
The following quations ummarize the dynamical quationshat
describe it;see
also Fig.1 .
The equations presented herepertain
to thecase where a unity relative degree has been assumed. In the equations
below, r(t ) is the (command) reference input and the disturbance d t) n
Fig. 1 is equal to zero.
plant:
auxiliary
variables:
model:
control
input:
output
error:
parameter
adjustment aw:
nominalcontrolledplant:
error
equation:
u ( f ) k T ( f ) w ( f )k*‘(t)w(r) +C T f ) W f )
= k* ‘ f ) W f ) +a f )
+ - - [ T I .*B*(s)* SI A T ( f ) W ( f )
In the above equations the following definitions apply:
k f ) k* + &(f)
where k* is a constant 2n vector.

8/13/2019 Robustness of Continuous-time Adaptive Control Algorithms Inthe Presence of Unmodelede Dynamics
http://slidepdf.com/reader/full/robustness-of-continuous-time-adaptive-control-algorithms-inthe-presence-of 3/9
TRANSACTIONS ON AUTOMATIC COhTRO L, VOL. AC-30, NO. 9 SEPTEMBER 1985 883
NOMINALLY CONTROLLED
PL ANT d ( t )
Fig. 3. Block diagram of a generic adaptive controller.
Kas)6k&- I p n - 2 + k;*( , -2)~”-~+. +kzl
k:i is the ith component of kz.
K ~ s ) ) k , ~ s ” - ’ + k ~ ” - , ) s “ - 2 +.. + k J
k is theith component of k;. In the preceding equations we have
[3]-[5], with P s)
g the characteristic polynomial for the state variable filters andthe parameter misalignment vector. In (8) g*B* s)/A* s)epresents
Awere
zero, Le., if a constant control law k = k* were used. Under
Bds) divides P s), hen k* can be chosen [l], such that
g*B*(s)/A*(s)can only getclose to g, As)/A, ) as the feedback structure of he controller
The first term on the right-hand side of (9) results from such a
(1 1) were satisfied, (9) reduces to the familiar
form that has appeared in the literature [8] for exactg. For more details the reader is referred to the literature cited in
section as well as to [15].
Fig. 2 represents, in block diagram form, the combination of parameter7) and (9).
In general, existing continuous-time algorithms [I]-[9] can be classi-
groups labeled here and in 1151 as CA1, CA2, CA3, CA4,, for continuous-time algorithms 1 , 2 , 3 , 4 .Fig. 3 represents a
d error structure which can be particularized to describe theany one of the existing adaptive algorithms, both n
by its discrete analog) in discrete time as well. In
3, the forward loop consists of a positive real transfer function, while
h contains the infinite gain operator(s). In the figure, thesystem input 2(t) is synthesized according to
ri(r)=P(t)Cp(t), (t)l
f t ) F ( s ) D [ H f ) , u t)le t)lI
C is a linear time-invariant system representing an observer or
an auxiliary state generator
Fig. 4. The infinite gain operators of CA2, CA3, and CA4.
M isusually a memoryless map, often the identify map
D is a linear time-invariant system analogous to C nd ften
identical to it< s) a stable ransfer function, often the identity
k( t ) , i t ) parameter error vectom related by &(to = m t ].
The above-mentioned four classes of adaptive algorithms have i
common the error feedback loop structure and the basic ingredients of the
parameter update mechanism, i.e., multiplication-integration-multiplica-tion, which forms the feedback part of the loop and is shown [15] to
constitute the infinite gain operators present in all existing adaptivealgorithms. These operators are hown in Fig. 4 as they apply specifically
to CA2, CA3, CA4. Analogously, the discrete-time algorithms are
classified into three distinct groups, DAl, DA2, D M . The four classes
mentioned n the preceding differ in the specific parameterization that
realizes the positive real transfer function in the forward path and in theparticular details of the parameter adjustment laws [choice of C, D , M,
F(s)].For example, in the simplest class of continuous-time adaptivealgorithms (CAI) under perfect modeling, the forward transfer function
represents the reference model transfer function, which *e controlledplant is able to match exactly, by assumption 1 1). Unfortunately, when
unmodeled dynamics are present, the controlled plant can only match thereference modelonly up to a certain frequency range and, thus, the
forward loop transfer function which represents the nominally controlled
plant and determines theerror dynamics, loses its positive realnessproperty. This, in conjunction with the infinite gain operator(s) in thefeedback loop, can bring about instability.
IU.THE INFINITE GAIN OPERATORS
A . Quantitative Proof of Infinite Gainfor Operators of CAI
The error system in Fig. 2 consists of a forward linear time-invariantoperator representing the nominal controlled plant complete with unmo-deled dynamics g*B*/kFA*, and a time-varying feedback operator. It isthis feedback operator which is of immediate interest. Theoperator,
reproduced inFig. 5 for the case where w is a scalar and r = 1 , is
parameterized by the function w t) and can be represented mathematicallyas
W ) Gwtn[e(t)lgo+w ( t ) j‘ w(7)e(7) d7. (12)

8/13/2019 Robustness of Continuous-time Adaptive Control Algorithms Inthe Presence of Unmodelede Dynamics
http://slidepdf.com/reader/full/robustness-of-continuous-time-adaptive-control-algorithms-inthe-presence-of 4/9
884 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. AC- 30, NO. 9, SEPTEMBER 1985
Fig. 5. Infinite gain operator of C A I.
Also
{lle(t)ll;2}2=a2r sin h o t d t s a 2 T .‘0
Therefore,
In order to make the notion of the gain of the operator G, ( t ) (.) precise, Ila(t)lli2we introduce the following operator theoreticoncepts. Ile Oll;,
truncated normDefinition I: A functionflt) from [0, ) to R is said to be inL k if the
[( I 2 )2b2c2os2Q a2e4cos2@I
l l f t o l l ~ 2 ~ (:?(7) d7 ’” (1 3) 24 T1l2
+ P - K 2 P - K , T - K o12
is finite for all finite T.
L 2 into functions in Lk is defined as
Definition 2: The gain of an operator Glf t ) ] ,which maps functions inT-. me3
and, therefore, G , for w as in (15) has infinite gain.
IlGV(t)lllL
J7f)€L, Ilr t)lll, .
In addition to the fact hat the operator G,(t) from e t) to C(t) has
(14) infinite gain, the operator ff,, from e(t) o ) in Fig. also has infinitelGll= SUP
gain. This operator is described byTE O.
If there is no finite number satisfying (14), then G is said to have infinitegain.
Theorem 1: If w ( t ) is given byTheorem2: The operatorHN,) ith w ( t ) given in (15) has infinite gain.
w(t ) = b + c sin wot (15) Proof:Choose e(t)= Q sin wot as before.hen [(to = Hyo[e(t)]sgiven by (18). Proof of infinite gain for this operator then follows n
Proof: The proofconsists of constructingasignal e@) , uch hat Remark I : Both operators G , and H , will also have nfinite gain forfor any positive Constants b, C , wo the operator of (12) has infinite gain. exactly analogous steps as in Theorem 1 and is, therefore, omitted.
.,vectors ~ ( t ) ,ince the operators’ nfinitegainscan arise from any
(16) component of the vector w ( t ) .
is unbounded.Let e(t) = a sin (wot + 6) ith an arbitrary positive constant, 6 n
arbitrary phase shift, and wo he same constant as in (15). These signals
produce
w(t)e(t) ab(sin wof cos 4 +COS o sin 6)
+ uc sin (sin wot cos Q +cos mot sin +) (17)
1
2= +- QC cos . t +constanterms + periodicerms (18)
C(r) = G,(t)[e(t)] Go+ w ( t ) j‘ w ( r ) e ( r ) dr
B . Two Mechanisms of Instability
In this section, we use the algorithm CA1 to introduce and delineatetwo mechanismswhichmay cause unstablebehavior n headaptive
system CAI, when t s mplemented n the presence of unmodeled
dynamics and excited by sinusoidal reference inputs or by disturbances.The argumentsmadeor CAI re also validorother lassesof
algorithmsmentionednection m u fa t k mutandis. Since the
arguments explaining nstability are somewhat heuristic n nature, heyare verified by simulations. Representative simulation resultsare given inSection IV.
In order to demonstrate the infinite gain nature of the feedback operator
of theerror system ofCAI in SectionII it is assumed that component of
w(t)has the form
w i ( t )= b + sin Wot (26)
== (ubc+ac2 sin w o f ) t + constant erms + periodic erms.and hat the error has the form2
(19) e(t)=a sin wot+Q). (27)
- K ; T ) l / 2 (20) havedistinctsinusoidsatacommon frequency, the operator GW of (12)
Next, using standard norm inequalities, we obtain from (19)The arguments of Section indicate that, ife ( t )and a componentof w ( f )
Ilc(t)ll;2, - cos Q - c2t sinI1
2 and the operatorHKfI)f (25)will havenfiniteains. Two possibilities for
e( t) , w ( t ) to have the forms of (26 ) and (27) are now considered.
e.g.,
with Ki ainiteonstant.ow Case I : If the referencenputonsistsfinusoidndonstant,
1
2abct cos 6+- ac’t cos Q sin wot (21)
r(t)=r,+r2 in od (28)
[ 2 b 2 c ~ x x 2 02c4cos’ Q
where rl and r2are constants, then the plant output y(t) will contain a
24 constanterm and ainusoid at frequency wowith an arbitrary phase shiftT 3 - K 2 P + K , T + K o (22)
( a 2 b 2 c ; y 2@ a2c4 cos2 6 If the controlled plant matches he model at dc but not at the frequency
l l ~ o I l ; ’ ) 2 ~ + T’ -~~ K~T - K ~ . wo, he output error24

8/13/2019 Robustness of Continuous-time Adaptive Control Algorithms Inthe Presence of Unmodelede Dynamics
http://slidepdf.com/reader/full/robustness-of-continuous-time-adaptive-control-algorithms-inthe-presence-of 5/9
ON AUTOMATICONTROL, VOL. AC-30, NO. 9, SEPTEMBER 1985 885
icontain a sinusoid at frequency w0. Thus, the conditions for infinitein the feedback path of Fig. 2 have been attained.
Case 2: If a sinusoidal disturbance, d(t), at frequency ~0 enters the
as shown in Fig. 1, the sinusoid will appear in w t)through
(3) in the presence of an output
wYi( t )=-@(t)+d(t) ] ; i = l 2, n .
(6) when an output disturbance is present
e(t)v(t) + d t) Y M ( ~ ) . (31)
I
P S)(30)
sinusoid present in d t) will also enter e(t) hrough (31). Thus, the
e(t)and w ( f )will contain sinusoids of the same frequency and the
H,,,) and GWcr)ill display an infinite gain.
1) Instability Due to the Gain of the Operator G, of 12): TheG, of (12) isnotonlyan infinite gain operator but its gain
such a manner as to allow arguments using linear
as outlined below.
Assume, initially, that the error signal is of the form of 27), i.e., a
~ 0 .ssume also that a component of w(t) s of the(26), i.e., a constant plus a sinusoid at the same frequency wo as
The output of the infinite gain operator GWcof (12), as givenby
consists of a sinusoid at frequency 00 with a gain which increases
0 rads (i.e., dc) and other
w0, Le., O t ) = 112 acZt in mot cos 6 + other terms.The infinite gain operator manifests its large gain by producing at the
a sinusoid at the samerequency, w0 as the input sinusoid butBy concentrating on the signal
u0 ndviewing the operator GWcr)s a simple time-
n with no phase shift at the frequency coo,. and very smal l
will be able to come up with a mechanism
2, where GMoconsists of the
g*B*(s)/ka*(s), f the
2, has less than k 180 phase shift at the frequency W O ,
if the gain of G, ,)were indeed small at all other frequencies, then theG,,,) at wo would not affect the stability of the error loop. If,
g*B*(s)/kTA*(s) oes have 180 phase shiftwo the combination of this phase shift with the sign reversal will
GWio,hereby
GWfr).he sinusoid will then
G,) grows, until
combined gain of Gdr) nd g*P(s)/k7A*(s) xceeds unity at thewo. At this point, the loop itself will become unstable and all
s will grow without bound very quick (as the effects of the unstable
G,, compound).
Since the infinite gain of GWcr)an be achieved at any frequency wo if
has f 180 shift at any frequency, the adaptive system
to instability from either a reference nput or a disturbance.Thus, the importance of the relative degree assumption, which
g*B*(s)/kFA*(s)s sbictly positive
is seen. The stability proof CAI hinges on the assumption thats strictly positive real and that G%,) s passive, Le.,
J + + w I ~ ~ ) dt=o. (32)
h properties of positive realness and passivity are properties which aref the gain of the operator involved. However, it is always
only aon the gain of the plant at high frequencies.
for a large class of unmodeled dynamics with relative degreeor greater, the operator g*B/kTi*, will have f 180 phase shift at
ency and be susceptible to unstable behavior if subjected to
2) Instability Due to the Gain of the Operator H , of 25): In the
the situation was examined where the amplitude ofe(t) grew with ime due to a positive feedback
loop. In this subsection, we explore the situation
where the sinusoidal error e@ , is not at a frequency where it will grow
due to the error system but, rather,when there exist persistent steady-state
errors. Such a persistent error could easily arise when an output sinusoidaldisturbance d(t)enters as shown in Fig. 1, causing the persistent sinusoid
directly on e(& through (31), and w(t) through 30).
Assume that a component of w(t)contains a sinusoid at frequency wo as
in (26) and that e(t)contains a sinusoid of the same frequency. Then the
operator H&, has infinite gain and the norm of the-output signal of thisoperator, ), increases without bound. The signal k(t)will take the form
of (18), repeated here
1
2t) Eo + - act cos ++constant terms + periodic terms.
From the second term one can see that theparameters of the controller,defined in (lo), i.e., k ( t ) = k* + @), will increase without bound.
If there are any unmodeled dynamics at all, increasing the size of the
nominal feedback controller parameters withoutboundwill cause theadaptive system to become unstable. Indeed, since it is the gains of the
nominal feedback loop that are unbounded, the systemwillbecomeunstable for a arge class of plants including all those whose relative
degree is three or more, even if no unmodeled dynamics are present.It should be noted that the arguments of this section have assumed that
the reference input or the disturbance is purely sinusoidal. Since the
adaptive system is nonlinear and the principle of superposition does notapply, he presence of a sinusoidal component n a signal willnot
necessarily give rise to the same effects. However, all that is needed forthe argument given toapply s that a dccomponent result from a
correlation between the output and the error. The dc component in the
correlation will produce parameter drift. Thus, any disturbance whosespectrum shows frequency peakmg will produce instability.
IV.SIMULATIONESULTS
In this section the arguments for instability presented in the previous
The simulations were generated using a nominally first-order plant withsections are shown to be valid via simulation.
a pair of complex but highly damped unmodeled poles, described by
2 229y t)=- .
s f l ) (s2+30S+229)W I
and a reference model
(33)
(34)
The simulations were all initialized with
k,(O) = - .65; k,(O)= 1.14 (35)
which yield a stable inearization of the associated error equations. For the
parameter values of ( 3 9 , one finds that
g*B*(s) 527
-- -A *(s) s3+3 Is2+259s+ 527 .
The reference input signal was chosen basedupon the discussion of
Section III-B-2
r(f)=0.3+1.85 sin 16.lt, (37)
the frequency 16.1 rad/s being the frequency at which the plant and the
transfer function in 42), i.e., g*B*(s)/k?A*(s),have 180 phase lag. A
s m a l l dc offset was provided so that the linearized systemwouldbeasymptotically stable. The relatively large amplitude, 1.85 of the sinusoid
in (37) was chosen so that the unstable behaviorwould occur over a
reasonable simulation time. The adaptation gains were set equal to unity.
A . Sinusoidal Reference Inputs
Fig. 6 shows the plant output and parameters k,(t) and k d t ) for theconditions described so far. The amplitude of the plant output at the

8/13/2019 Robustness of Continuous-time Adaptive Control Algorithms Inthe Presence of Unmodelede Dynamics
http://slidepdf.com/reader/full/robustness-of-continuous-time-adaptive-control-algorithms-inthe-presence-of 6/9
886 IEEE TRANSACTIONSNUTOMATIC CONTROL, VOL. AC-30, NO. 9, SEPTEMBER 1985
90, I
-9.0 I 1 II0 2 4 6 8 IO 12 14 16 18 20
T I M E
-2.0 II
,I J
0 2 4 6 8 IO 12 14 16 18 20
T I M E
-121 I 1
0 2 4 6 8 IO 12 14 16 I8 20
T I ME
Fig.6. Simulationof CAI with unmodeled dynamics and r ( t ) = 0.3 + 1.85 sin 16.1 t .(System becomes unstable.)
critical frequency (wg = 16.1 rads) and the parameters grow linearly
wth time until the Imp gain of the error system becomes larger thanunity. At this point in time, even though the parameter values are well
within the region of stability for the linearized system, highly unstable
behavior results.
Fig. 7 shows the results of a simulation, ths time with the reference
r t )= 0.3+2.0 sin 8.0t . (38)
This simulation demonstrates that, if the sinusoidal input is ata frequencyfor which the nominal controlled plant does not generate a large phase
shift, the algorithm may stabilize despite the high gain operator.Similar results were obtained for the algorithms described in [3], [4],
[6],7], [ 9 ] , but are not included here due to space considerations. Thereader is referred to [15] for a more comprehensive set of simulation
results, in which instability occurs for various sinusoidal inputs.
input
B. Simulations with Output Disturbances
The results in this subsection demonstrate that the instability mecha-
nism explained in Section III-B-1 does indeed occur when there -is an
additive unknown output disturbance at the wrong frequency, entering thesystem as shown in Fig. 1. In addition, the instability mechanism ofSection HI-B-2 which will drive the algorithms unstable when there is a
sinkoidal disturbance at anyfrequency, is also shown to take place. Thesame numerical example is employed here as well.
Instability Via he Phase Mechanism of Section III-B-I: In thiscase, CA1 was driven by a constant reference input
r t)=2.0 (39)
with an output additive disturbance
d(t)=0.5 sin 16.1t. (40)
The results are shown in Fig. 8, and instability occurs as predicted.Instability Via the Gain Increase Mechankm of Section 111-8-3:
Fig. 9 hows the results of a simulation of CA1 that was generated with
r=2 0
0 2 4 6 8 IO 12 14 16 18 20
Fig. 7. Simulationof CAI with unmodeled dynamics and <t) = 0.3 + 2.0 sin 8.0 t .No instability observed.)
T I M E
l8
0 8 16 24 32 40 48 56 642
' 5
8
-2410 8 16 24 32 4 0 48 5 64 72
T I M E
@I
Fig. 8. Simulation of CA1 with highly damped unmodeled dynamics ( t ) = 2.0 and
d( r ) = 0.5 sin 16.1 f. System becomes unstable.)

8/13/2019 Robustness of Continuous-time Adaptive Control Algorithms Inthe Presence of Unmodelede Dynamics
http://slidepdf.com/reader/full/robustness-of-continuous-time-adaptive-control-algorithms-inthe-presence-of 7/9
TRANSACTIONSN AUTOMATIC CONTROL, VOL. AC-30. NO , SEPTEMBER 1985 887
8
- 4 -
- 80 80 160 240 320 40080 560
T I M E
(a)
30
20 - k, I -
kY
.20 7 -
- 3 00 80 160 240 320 4 0 0 480 560
T I M E
(b)
9. Simulation of CAI with highly dampea unmodeled dynamics, fit = 2.0 and
d(z) = 0.5 sin 8 t . (System becomes unsrable.)
disturbance was changed to
) = O S sin st. (41)
of increasing amplitude, which is characteris-of instability via the mechanism o f Section III-B-1, is not seen in Fig.
What is seen is that the system becomes unstable by the mechanism of
III-B-2. While the output appears to settle down to a steady-stateky parameter drifts away until the point where the
9 in order to maintain scale.)
The most disconcerting part of this analysis b that none of thems analyzed with constant set point reference inputs have beeno counter this parameter drift for a Sinusoidal disturbance at
frequency triedIndeed, Fig. 10 shows the results of a simulation run with reference
r=0.0 (42)
constant disturbance
d=3.0. (43)
simulation results show that the output settles for a long time withky increases in magnitude until instability
adaptive algorithm shows no ability to act even as aare output disturbances.
However, inorder odrive the system unstable with a constant
as it took to drive the
h a higher frequency sinusoid, the magnitude of the
must be much larger in the constant disturbance case. Thedisturbance must be larger because the nominal control system
a larger gain at dc and thus better disturbance rejection. The time it
- 4 1 ' ' ' '0 80 160 240 320 400 480 560 640 720 800 880 960 1040 1 1 2
TIME
(a)
16
- 3 2 ~ ' ~
0 80 160 210 320 400 480 560 640 720 800 880 960 I040 1120
(b)
T I M E
Fig. 10. Simulation of CAI with highly dam@ unmodeled dynamics, fit = 0 0 ndd t) = 3.0. (System becomes unstable.)
takes for the system to go unstable is inversely proportional to the square
of the magnitudeof the part f disturbancestill present at the utput of the
closed-loop controlled system.In the previous simulations the unmodeled dynamics which were used
were highly damped. Fig. 11shows the results of a simulation of a plantwith less well damped unmodeled dynamics at a somewhat lowerfrequency and a smaller disturbance. The plant used n the run is
described by
The reference input was again
r(t)= 2.0. (45)
The disturbance used was
d(t)=O.l sin 8t . (46)
In this case the parameter drift is slower than in Fig. 9. However, the
parameters need not drift as far to cause instability due to the less benignurnodeled dynamics in ths case, so the system exhibits unstable behavior
in approximately the same amount of time.It is important to understand that the parameters will drift and cause
instability in these cases no matter how s m a l l the disturbances. If the
disturbance is made s m a l l by filtering, the parameters will drift slowly and
the system will take a long time to become unstable but it will indeedbecome unstable if the disturbance persists long enough. Also a
sinusoidal disturbance at any frequency will cause parameter drift.It appears that the only way to counteract the drift cause by sinusoidal
disturbance is to swamp out the effects of the disturbance with probingreference inputs. These inputs must be more than sufficiently exciting.Further research is needed to quantify the effects of probing signals and
develop practical guidelines as to their use.
V. CONCLUSIONS
In this paper it was shown, by analytical methods and verified bySimulation results that existing adaptive algorithms as described in [I]-141, [ 6 ] , i'J, [19], have imbedded in their adaptation mechanisms infinite

8/13/2019 Robustness of Continuous-time Adaptive Control Algorithms Inthe Presence of Unmodelede Dynamics
http://slidepdf.com/reader/full/robustness-of-continuous-time-adaptive-control-algorithms-inthe-presence-of 8/9
888 I TRANSACTIONS ON AUTOMATIC CONTROL, VOL. AC-30, NO. 9 , SEPTEMBER 1985
-48 I0 BO 160 240 320 400 480 560
(a)
T I M E
-60 80 160 240 320 400 480 560
T I M E
(b)
Fig. 1 I. Simulation of CAI aith poorly damped unmodeled dynamics. fit = 2.0 andd(t) = 0.1 sin 8 t. System becomes un stable.)
gain operators which, in the presence of urnodeled dynamics, can cause
the following:
instability, if the reference input is a high frequency sinusoidinstability, if there is a sinusoidal output disturbance at any
frequency including dc.
While the first problem c n be alleviated by proper limitations on the
class of permissible reference inputs, the designer has no control over theadditive output disturbances which impact his system. Sinusoidal distur-bances are extremely common in practice and can produce disastrous
instabilities in the adaptive algorithms considered.Suggested remedies in the literature such as low-pass filtering of plant
output or error signal [ 2 6 ] , [7l, [21]wi not work either. It is shown in
[151 that adding the filter to he output of the plant does nothing to change
the basic stability problemas discussed in Section II-B. It is also shown in
[I51 that filtering of the output error merely results in the destabilizinginput being at a lower frequency.
Exactly analogous results were also obtained for discrete-time al-
gor i thms as described in [ 5 ] , [ lq , [18], [20] and have been reported in
r151.Finally, unless something is done to eliminate the adverse reaction to
disturbances at any frequency in the presence of urnodeled dynamics, theexisting adaptive algorithms should only be considered as alternatives toother methods of control in situations where stable control c n be
guaranteedby possibly switching to known stable backup controllers or by
implementing other “safety nets.” A deeper understanding of theproblems presented here may ead to increased understanding of what
“safety nets” are applicable and reasonable.
REFERENCES
[I] K. S. Narendra nd L. S. Valavani, Stable adaptiw controller design directcontrol,” IEEE Trans. Automat . Contr. ,vol. AC-23. p p . 570-583, Aug. 1978.
[2] A. Fwer and A . S. Morse, “Adaptive control of single-input single-output linear
systems,” IEEETrans. Automat.Contr., vol. AC-23, pp. 557-570,Aug.
1978.K. S. Narendra, Y.H Lm. nd L. S. Valavani.“Stableadaptivecontrollerdesign. Pan II:Proof of stability,” IEEE Trans. Automat. Contr., vol. A C-25,
A. S. Morse, “Global stability of parameter adaptive control system s,” IEEEpp. 440-448, une 1980.
G. C. GoodwnP. J. Ramadge, and P. E. Caines. “Discrete-time multivariableTrans. Automat. Contr., vol. AC-25, pp. 43 34 40 , June 1980.
adaptive control,” IEEE Tram. Auttomat. Contr., vol. AC-25, pp. 449-456,June1980.I. D. Landau nd H. M.Silveira, “A stability heoremwith pplications to
adaptive control.” IEEE Trans. Automar. Contr., vol. AC-24, pp. 305-312,Apr.1979.B. Egardt. Stability nalysis of continuous-time daptive ontrol system s,”SIAM J . Confr. Optimiz., vol. 18, no. 5 , pp. 540-557, Sept. 1980.L. S . Valavani,“Stabilityandconvergence of adaptivecontml algorithms: A
survey and some new results,” Proc. JACC Conf.. San Francisco, CA Aug.1980.B. Egardt,“Unification of somecontinuous-timeadaptivecontrol chemes,”IEEE Trans. Automar. Contr.. vol. AC-24, no. 4, pp. 588-592. Aug. 1979.P. A. Ioannou and P . V. Kokotovic, ”Erro r bound for model-plant mismatch inidentifiers and adaptiveobsetvers,” IEEE Trans. Automat . Confr. , ol. AC-27.
C. Rohrs, L. Valavani, M. Athans, and G. tein,“Analyticalverification of
pp. 921-927, Aug. 1982.
undesirable properties of d i r e c t model reference adaptive control algorithms,”Mass. Inst. Technol.. Cambridge, LJDS-P-1122, Aug. 1981; also in Proc. 20thIEEE Conf . Decision Contr. . San Diego, CA, Dec. 1981.P. Ioannou and P. V . Kokotovic, “Singular pemrbations and robust redesign of
adaptive control ,” Proc. 21st. IEEE Conf . Decision Contr., Orlando, FL,Dec.1982, pp. 24-29.C. Rohrs, L. Valavani, and M. Atbans, “Convergence studies of adaptive controlalgorithms, Part I: Analysis,” in Proc. IEEE Conf. Decision Contr., Albuquer-
R. V. Mo nop li, “Model eferenceadaptivecontrolwith an augmented errorque, NM, 1980, pp. 1138-1141.
signal,” IEEE Trans. Automat. Contr., vol. AC-19, pp. 474-4 84, O d . 1974.
dissertation, Dep. Elec. Eng . Comput. Sci., Mass. Inst. Technol., Aug. 1982.C. R o b , “Adaptive control n he presence of unmcdeled dynamics,” Ph.D .
P. Ioannou, “Robusmess of model reference adaptive schemes with respect tomodeling errors.” Ph .D. dissertation, Dep. Elec. Eng ., Univ. Illinois at Urbana,
B. gardt, “Unification of some discrete-time adaptive control schemes,” IEEERep. DC-53, Aug. 1982.

8/13/2019 Robustness of Continuous-time Adaptive Control Algorithms Inthe Presence of Unmodelede Dynamics
http://slidepdf.com/reader/full/robustness-of-continuous-time-adaptive-control-algorithms-inthe-presence-of 9/9
C-30,O. 9, SEPTEMBER 1985 889
K. . M m nd B. Wittenmark, “A self-tuning regulator,” Automatica, no. 8 ,
Trans, Automat. Contr.. vol. AC-25, no. 4, pp. 693-697, Aug. 1980.
p p . 185-199, 1973.
G Kreisselmeier.“Ada ptive control via adaptiveobservationandasymptoticfeedbackmatrix synthesis,” IEEE Trans. Automat . Contr. . vol.AC-25, pp.717-722, Aug. 1980.I. D . Landau “An extension of a stabilityheorem pplicable to adaptive
I. D. Landau and R. Lo r n o , “Unification of discrete-time explicitmodelcontrol,“ IEEE Trans. Automat . Contr. ,vol. AC-25, pp. 814-817, Aug. 1980.
K.S. Narendra and Y.H. Lin “Stable discrete adaptive control,” IEEE Trans.reference adaptive control design,”Automatica. no. 4, pp. 593-611, July 1981.
R. L. Kosut and B. Friedlander, “Performance robustness properties of adaptive
Automaf. Confr.,vol. AC-25, pp. 456-461, June 1980.
control systems,” in Proc. 21st. IEEE Conf. Decision Contr., Orlando, FL,
C . E. Rohrs, L. Valavani, M. Athans, and G tein, “Robustness of adaptivecontrol algorithms n the presenceof unmodeled dynamics,.” inProc. 21sr. IEEEConf. Decision Contr., Orlando, FL, Dec. 1982, pp. 3-11.B. D . 0 nderson,“Exponentialconvergence andpersistent excitation,” in
J . Krause, M.Athans, S. S. Sasuy, and L. Valavani, “Robustnessstudies n
h o c . 2Jst IEEE Conf. Decision Contr., Orlando, FL, Dec. 1982, pp. 12-17.
Dec. 1982, pp. 18-23.
inmagnitude to overcome destabilizingeffects from high-frequency
inputs or noise.
The heuristic arguments given above are supported by analysis and
simulations n [2] and [3]. Differentialequationswhichapproximatelydescribe the dynamics of the adaptation gains are derived using averagingmethods. It is shown that these equations have an equilibrium line when
the reference is a step and that the parameterswdrift along this line
when there are disturbances. It is also shown that the equilibrium is a
point for sinusoidalcommand ignals. The equilibriumand ts local
stability depend on the frequency of the reference signal.
It may justifiably be questioned if the properties of the reference signalcan be postulated. If this cannot be one the excitation of the input signalcan be monitored. If the signal is not properly exciting, perturbations can
be added, as suggestedbydualcontrol theory, or the adaptationbe
switched off 4]. Variations of such schemesare found in several practical
adaptive systems [ 5 ] . They may be viewed as implementations of thecommon sense rule “don’t fit a model to bad data.”
adaptive control,” in Proc. 22nd IEEE Conf. Decision Conrr., San Antonio, In closing I would like to thank you, Charles, for sticking your neck outTX, DE. 14-16. 1983, pp. 977-981. as a young Ph.D. and challenging “the adaptive establishment.” I have
personally enjoyed our discussions. I have learned a lot from them andfrom trying to understand what happens in your simulations.
A Cornmentaw on the C. E. Rohrs et al. Paper“Robustness of Continuous-Time Adaptive Control
of Unmodeled Dynamics”
KARL OHAN ASTROM
versions of the above paper have been presented at several1980. These presentations have certainly contributed
makingthe sessions on adaptive control at the CDC Conferences
and fun. The discussionshavealso nspireda otofworkon
o our
It is therefore with great pleasure thatsee
above paper is finally publishedo that the discussions can reach a
was demonstrated byRobs that a simpleMRAS with two parametersbehave peculiarly when applied to a system with unmodeled high-
the reference signal is a step, then the system can
driven unstable by adding a mall sinusoid with proper frequencyo the
r by adding measurement noise of any frequency. The paperthe observed henomena y emonstratinghat there are
with infinite gain in the adaptive loop. It is then pragmatically
this will generically lead to difficulties.
my opinion that this argument does notapture all the aspects of the
I would therefore offer another explana-of the observed phenomena. The key elements of the argument are
be determined reliably unless the input signal isexciting of the appropriate order [ l ] . In thepresenceof
dynamics t s also critical hatexcitation sachieved bythe proper frequency range. From this viewpoint the source of
is that the reference signal is a step which is persistentlyThis means hatonly one parametercan be
two parameters are adjusted they may end
In the presence of unmodeled dynamics the
so large that the system becomes unstable.difficulties can be overcome if he nput sasinusoidwhich s
exciting of order two. Two parameters can hen be deter-Unmodeled ynamicswill ot ause ny ifficultiesf the
reference signal is sufficiently low and sufficiently large
R F N X E N C E S
[l] K. J. Astr6m and T. Boblii, “Numerical identification ofLineardynamic systemsfrom normal operating records,” in Theory of Self-Adaptive Control Systems,P. H. ammond, Ed. New York Plenum, 1966.
121 K. I . Astnjm, “Analysis of Rohrs counterexample o adaptive control,” in Proc.22nd IEEE Conf. Decision Contr., SanAntonio TX, pp. 982-982, Dec. 1983.
[3] - “Interactions between excitation and m o d el e d dynamics in adaptivecontrol,” in Proc. 23rdIEEE Conf. Decision Contr., Las Vegas,NV, pp.1276-1281.
[41 - “LQG self-tuners,” n Adapt ive Systems in Control andSignalProcessing, Proc. IFAC Workshop, San Francisco, June 1983), Landau et al.E d . New York: Oxfordb 1984.
[ 5 ] B.Wittenmark and K. . Astrom, “Practical issues in the implementation of self-tuning control,” Automatica, vol. 20, pp. 595605. 1984.
On the Stability of Parallel MRAS with an AEF
BULENT KERIM ALTAY
Absstruct-The stability of the parallel model reference adaptive system(MRAS) with an adjustable error fiiter ( A m is discnssed. It is shownthat thenull solutions of the parameter error vector and output error are
asymptotically stable if the parameter update recursion employs time-varying adaptationgainmatrix.Theanalysisproceedswith imple
algebra, eliminates the strict positive realness SPR)machinery, and does
not resort to Lyapnnov’s direct method and hyperstability.
I. INTRODUCTION
In parallel M U S , the adjustable system is described by the difference
equation
25, 1985. LManuscript r eceived Octo ber 15, 1984.
uthor iswith
rhe Department ofAutomatic Control. Lund Institute of The isithhe hp mentf ~ l ~ h dnd ~ l ~ ~ ~iddle, Lund, Sweden. East Technical Universicy, Ankara, T urkey.
0018-9286/85/0900-0889 01.00 985 IEEE