Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 44, NO. 10, OCTOBER 1997 867
Robustness and Stability of SynchronizedChaos: An Illustrative Model
Mikhail M. Sushchik, Jr., Nikolai F. Rulkov, and Henry D. I. Abarbanel
Abstract—Synchronization of two chaotic systems is not guar-anteed by having only negative conditional or transverse Lya-punov exponents. If there are transversally unstable periodicorbits or fixed points embedded in the chaotic set of synchronizedmotions, the presence of even very small disturbances from noiseor inaccuracies from parameter mismatch can cause synchroniza-tion to break down and lead to substantial amplitude excursionsfrom the synchronized state. Using an example of coupled onedimensional chaotic maps we discuss the conditions required forrobust synchronization and study a mechanism that is responsiblefor the failure of negative conditional Lyapunov exponents todetermine the conditions for robust synchronization.
Index Terms—Chaos, stability, synchronization.
I. INTRODUCTION
SINCE the first observations of synchronized chaos [1]–[3],this behavior has been the subject of a substantial number
of investigations. This arises both because of the intrinsicinterest in the idea of synchronization between chaotic, ir-regular motions and because of potential applications. Amongthe possible applications are secure communications [3]–[8]and control of systems with chaotic behavior [9]–[11]. Therehave also appeared several papers [12]–[14] which establishthe clear connection between synchronization and modern non-linear control theory [15]. For the applications of synchronizedchaos it is important to establish criteria that would determinethe conditions, for example, the value of the coupling strength,that guarantee that two systems would demonstrate steady,undisrupted synchronization. In practice one frequently usesthe negativity of alltransversal or conditional Lyapunov ex-ponents, so that oscillations transverse to the synchronizationmanifold should contract back to that manifold. This method isstraightforward and universal, however, in practice it appearsnot to be a sufficient condition for stable operation of thesystem in the regime of synchronized chaos [16]–[22].
When the conventional transversal Lyapunov exponents areevaluated, they are computed along achaotic trajectory in the
Manuscript received January 23, 1997; revised June 7, 1997. This work wassupported in part by the U.S. Department of Energy, Office of Basic EnergySciences, Division of Engineering and Geosciences, under Grant DE-FG03-90ER14138 and Grant DE-FG03-95ER14516; the Office of Naval Research(Contract N00014-91-C-0125), and by the National Science Foundation underGrant NSF:NCR(FDP) NCR-9612250. This paper was recommended by GuestEditor M. P. Kennedy.
M. M. Sushchik, Jr. and N. F. Rulkov are with the Institute for NonlinearScience, University of California, San Diego, La Jolla, CA 92093 USA (e-mail: [email protected]; [email protected]).
H. D. I. Abarbanel is with the Department of Physics and the Marine Phys-ical Laboratory of Scripps Institution of Oceanography, University of Califor-nia, San Diego, La Jolla, CA 92093 USA (e-mail: [email protected]).
Publisher Item Identifier S 1057-7122(97)07330-3.
invariant chaotic set of synchronized motions. The negativityof these exponents indicates that in the neighborhood ofthe chaotic set of synchronized motions there is a set ofinitial conditions of nonzero measure such that trajectoriesoriginating at these points are attracted to the chaotic setof synchronized motions. At the same time, the negativityof global transversal Lyapunov exponents is not sufficient toguarantee the linear stability of thechaotic setas a whole.This is because, besides trajectories coming to the chaoticset of synchronized motions, there may still exist trajectoriesdeparting from the chaotic set. The mathematical analysis ofthe problem of transversal stability for chaotic sets shows thatto study the transversal stability of an invariant chaotic set, onemust consider Lyapunov exponents computed forall invariantmeasures defined on this set (see for example [23]). When thisstability analysis is applied to the problem of synchronizationof chaos, it determines whenall initial conditions in a smallregion fully containing the chaotic set of synchronized motionsare attracted toward it.
Stated plainly, this means that within the set of synchronizedtrajectories left invariant by the dynamics there may be bothchaotic trajectories where the transversal Lyapunov exponentsare negative and other trajectories that have positive transver-sal exponents. In the usual analysis, the Lyapunov exponentsare computed along the chaotic trajectory. However, whenthe system evolves in the vicinity of a transversally unstableorbit, noise or other disturbances can drive the system awayfrom the manifold of synchronized motions. The presence ofthese “embedded” unstable orbits means that one must locatethem, or at least the most unstable among them, and makesure that the coupling between the systems to be synchronizedis sufficiently large to overcome these additional, unwantedinstabilities.
Using the example of coupled maps, we shall show that onlytransversal stability of thewhole chaotic setof synchronizedmotions can guarantee the robustness of synchronized chaoticoscillations. When this chaotic set is unstable and transversalLyapunov exponents forsomeinvariant measures defined on itare positive, the introduction ofarbitrarily small disturbancesinto the system, for instance noise in the coupling channel, cantrigger finite size outbursts of unsynchronized behavior. Weshall show that this can occur even when the largest transversalLyapunov exponent computed along a chaotic trajectory isnegative. Such behavior is explained by the presence oftransversally unstable fixed points and periodic orbits embed-ded in the chaotic set of synchronized oscillations. Thus, weshow that the robustness of synchronized chaos is determinedboth by the global transversal Lyapunov exponents computed
1057–7122/97$10.00 1997 IEEE

868 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 44, NO. 10, OCTOBER 1997
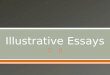
Fig. 1. The chaotic attractor of the driving mapx ! f(x).
for chaotic trajectories and by the transversal characteristicexponents of the fixed points and periodic orbits containedin the chaotic set of synchronized motions. Identifying thoseadditional regions of transversal instability allows us, in ourexample, to set a criterion for the onset of stable synchroniza-tion between the systems.
II. ROBUSTNESS ANDSTABILITY OF
SYNCHRONIZED CHAOS IN MAPS
A. The Coupled Maps; Conventional TransversalLyapunov Exponents Analysis
Our example system in this paper is comprised of the twocoupled maps
(1)
(2)
where
(3)
and is a scalar coupling parameter . We choosethe parameters 5 and 2 which gives rise to chaoticmotions of the . The first map is autonomousand drives in a unidirectional fashion the dynamics of. Thisis the kind of setup appropriate for the communications andcontrol applications mentioned at the beginning. Synchronizedmotions of these coupled maps is just which is clearlya solution of the system.
The chaotic attractor of the map is shown in Fig. 1. Thissimple example has been selected as it is very easy tosee the mechanism that leads to instability of the regimeof synchronized chaos even when the transversal Lyapunovexponent is negative.
Since the coupled maps are each one-dimensional, it is veryeasy to compute the global transversal Lyapunov exponent forthis system. Call the deviation from the synchronizationmanifold, so . The evolution of is
(4)
or for small in the linearized form
(5)
The solution of the linearized equation for is
(6)
where is the th iteration of the map starting from .The transversal Lyapunov exponent is found as
(7)
where is the average over some invariant measure. Inpractice, one usually uses thenatural invariant measure [34]on the chaotic attractor to compute the Lyapunov exponent.1
In this case, the last term in (7) is just the Lyapunov ex-ponent of the chaotic attractor in the autonomous drivingmap. The expression for the transversal Lyapunov exponentbecomes
(8)
In our example, 0.87 and a plot of as a functionof is shown in Fig. 2. One can see that the transversalLyapunov exponent is negative for 0.58. This paperis our inquiry whether this analysis in fact guarantees that for
0.58 synchronized chaos is robust for this system.By robustness we mean the property that the introduction ofinfinitesimal perturbations does not lead to the occurrence offinite outbursts of unsynchronized behavior in the otherwise“stable” regime of synchronization.
B. The Transversal Stability of the Chaotic Setof Synchronized Motions
To address this question, we performed the following nu-merical tests: i) We iterated maps (1), and (2) and recordedthe maximum deviation from the synchronizationmanifold as a function of the coupling strengthand ii) smallamounts of noise were introduced into the response map as
(9)
is white noise uniformly distributed within the interval[ ]. The maximum deviation was evaluated as we variedthe amplitude of the noise,, over a small range near zero;
0.04. The results are summarized in Fig. 3.One can see that even noise of very small amplitude has
a very dramatic effect on synchronization. Without noise, aspredicted by the transverse Lyapunov exponent analysis, the
1In practice, natural invariant measure is usually approximated by thecollection of points visited by the system during its natural evolution on achaotic attractor.

SUSHCHIK et al.: ROBUSTNESS AND STABILITY OF SYNCHRONIZED CHAOS 869
Fig. 2. The conditional Lyapunov exponent as a function of the couplingg.The point on this curve where�c = 0 is frequently thought to be the stabilityboundary for synchronized chaos regime.
Fig. 3. The maximum deviationjxn � ynj from the synchronization mani-fold for systems (1), (2) as a function of the coupling strengthg. The amplitudeof noise� in the coupling channel varied from 0.00 to 0.04 in steps of 0.002.
maps synchronize when 0.58. One sees an abruptonset of synchronization. However, when noise is present,the transition to synchronization has a smoother characterand the maps remain unsynchronized until higher values ofthe coupling. This behavior does not depend strongly on theparticular kind of disturbance introduced into the system. Asa check, we conducted the same numerical tests with noiseadded both in driving and in response maps. The results werenot qualitatively different from those shown in Fig. 3. Thesituation with noise more accurately describes the practicalsituation as noise is always present in physical systems. Ourexample, thus, shows that although is negative and there isa set of initial conditions of nonzero measure attracted towardthe chaotic set of synchronized motions, this by itself does notensure the stable evolution of coupled maps in the regime ofsynchronization.
Fig. 4. Characteristic exponents of fixed points and periodic orbits in thechaotic attractor of the driving map. The characteristic exponent�0 corre-sponds to the fixed point at the originx = 0.
Let us now find the value of at which the whole chaoticset of synchronized motions becomes transversally stable.Following the work of Ashwinet al., we take into accountcontributions from other invariant measures defined on thechaotic set of synchronized motions. Thus, we define a wholeclass of transversal exponents:
(10)
where is the set of invariant measures we consider. Inour example some of these exponents remain positive up to
.Let us consider the set of fixed points and periodic orbits
embedded into the chaotic set of synchronized motions. Thereis an invariant measure that corresponds to each ofthese fixed points and periodic orbits
(11)
where stands for the period of one of these orbits,identifiesthe periodic orbits of a given period and is a point ona periodic orbit. Using these measures in (10) transforms thelast term into the characteristic exponents of fixed points andperiodic orbits associated with the driving map. We computedthese exponents for all fixed points 1, and periodic orbitsof order up to 10. The results are shown in Fig. 4. Wesee that the characteristic exponents for the fixed point0 and for many periodic orbits are larger than the Lyapunovexponent of the chaotic attractor in the driving map (0.87). Therefore, stronger coupling will be necessary to ensurethe transversal stability of the corresponding fixed points andperiodic orbits in the coupled system (1), (2). The fixedpoint at the origin is characterized by the greatest transversalinstability. This is due to the fact that the derivative of themapping function is maximum at that point.
Fig. 5 shows as a function of the coupling strengthfor a few of the most transversally unstable fixed points
and periodic orbits with 10. One can see that all

870 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 44, NO. 10, OCTOBER 1997
Fig. 5. A few largest transversal characteristic exponents as functions of thecouplingg. The dashed line shows�? as a function ofg. The upper curvecorresponds to the fixed point at the originx = 0.
become negative when 0.8. For 0.8 all fixedpoints and all periodic orbits in the coupled system becometransversally stable. It is worth noticing that the upper boundfor the characteristic exponents in the driving map (see Fig. 5)approaches the characteristic exponent of from belowas the order of orbits increases. The higher values of thecharacteristic exponents correspond to the orbits that spendmore time in the neighborhood of the fixed point(0, 0). Therefore, as decreases below the critical value
, an infinite number of high-order periodic orbitsbecome transversally unstable.
Although in our analysis we did not really consider allinvariant measures, it is reasonable to assume that the invariantmeasure corresponding to the least transversally stable fixedpoint ( (0, 0) will determine the overall transversalstability of the chaotic set of synchronized motions, whichagrees with the observations in [24]. Thus we expect that for
0.8 the entire chaotic set of synchronized motionswill be transversally stable. In Appendix A, we show how thelinear transversal stability of this set can be proven by usingthe ideas behind the method of contraction mappings.
C. The Effect of Noise on Synchronization of Chaos
In the previous sections, we considered two approaches tothe analysis of transversal stability of synchronized motions.The first approach was based on the calculation of transversalLyapunov exponents which only characterize the transversalstability of thechaotic trajectory in the synchronization man-ifold. In the second approach, the stability analysis is donefor the entire chaotic set of synchronized motions, includingembedded fixed points and periodic orbits. It was shownby numeric simulation that in the presence of arbitrarilysmall (but nonzero) noise the first approach cannot be usedfor calculation of the critical value of coupling at whichrobust synchronization sets in. We shall now discuss whythe transversal stability of fixed points and periodic orbits inthe chaotic set of synchronized motions is so important forrobustness of synchronized chaos.
Let us consider the mechanism of noise amplification duringthe systems evolution in the neighborhood of the manifold ofsynchronized motions. In the presence of noise, the evolutionof is governed by the following equation:
(12)
The evolution of small perturbations away from the synchro-nization manifold is obtained by linearizing this near thesolution 0, 0
(13)
Suppose the driving system (1) starts at some, system(13) starts at small and is subject to small noise. and theamplitude of noise can be made sufficiently small to validatethe linear approximation over a desirable time interval. Asdictated by (13), after iterations is determined by
(14)
Clearly the expressions in the braces are related to the localtransversal multipliers defined as
(15)
where denotes the location on the synchronization manifold,represents the duration of the trajectory. Equation (14) can
be rewritten as
(16)
Note that, by definition of and , the two are relatedby . Thus, at large , the firstterm in (16) approaches zero exponentially, as long as0. Therefore, for the original coupled maps it means that if
0 and there is no noise in the coupling channel, almostall initial deviations away from the synchronization manifoldwill decay and the systems will eventually synchronize. Thisobservation is not new (see, for example, [18]), and it isin complete agreement with our numerical tests discussedabove.
Unlike the first term, the second term contains contributionsfrom local multipliers, even in the limit . Suppose thenoise has the characteristic amplitude . Then, apparently,it can be amplified to a finite scale [ ] within the linearframework if some of the multipliers in the sum of expression(16) are of the order . We shall now show that in oursystem when 0.8 the multipliers in (16)can be arbitrarily large for certain locations on the chaotic setof synchronized motions.

SUSHCHIK et al.: ROBUSTNESS AND STABILITY OF SYNCHRONIZED CHAOS 871
It follows from (5) that the region of the greatest transversalinstability is the one where is maximum. In ourexample, the derivative is maximum at the point 0 whichis a fixed point of the driving map. The point (0, 0)is a fixed point of the coupled system (1), (2). This point isembedded into the chaotic set of synchronized motions mean-ing that a chaotic trajectory in this set can come arbitrarilyclose to this point.
Now examine how the stability of the point(0, 0) depends on . The point in the drivingsystem is unstable. Since the coupling is one-way, the point
(0, 0) will be unstable in the direction along thesynchronization manifold, for all values of. Now how doesits transversal stability change? The quite straightforwardanalysis shows that this fixed point is stable with respectto perturbations away from the synchronization manifold if
0.8. As decreases, at thebifurcation occurs in which two new fixed points are bornoutside the synchronization manifold. Thus, at this momentthe point (0, 0) becomes transversally unstable anda trajectory appears that departs from the synchronizationmanifold exponentially rapidly.
Let us now come back to the mechanism of noise amplifica-tion in the linearized system (13). Suppose and thus thefixed point at the origin is transversally unstable. We can showthat in this case, for any arbitrarily largeone can find suchthat for every there is such that (seeAppendix B for details). Thus, for points close to(0, 0) the multipliers grow without bound. During itsevolution on the chaotic set of synchronized motions thesystem can approach arbitrarily close to the point(0, 0). Suppose there is noise of characteristic amplitudein the channel. Then for arbitrarily small the system willeventually pass so close to the point (0, 0) that atsome iteration . So arbitrarily small noise inthe synchronization channel creates the opportunity for thesystem to deviate to a finite distance from the synchronizationmanifold . This scenario, in our example, explainswhy the coupled maps remain unsynchronized in the region
.The mechanism of noise amplification in the neighborhoods
of periodic orbits is similar to the one we just considered.Thus, for robust synchronization of chaos it is crucial thatall invariant sets embedded in the chaotic set of synchro-nized oscillations are transversally stable. This conclusionagrees with the results of our numerical simulation shownin Fig. 3 up to the following consideration. The robustnessis determined by the behavior of a system in the presence ofinfinitesimalperturbations. Thus, the robustness issue shouldis most adequately illustrated by the curves corresponding tothe smallest noise amplitudes. There are two reasons whythese curves do not demonstrate a clear transition point at
0.8. One is that the outbursts of unsynchronized behaviorclose to this point are increasingly seldom and it becomesincreasingly hard to collect adequate amount of data to prop-erly estimate themaximumdeviation. The second is that thistransition is supercritical and the maximum deviation increasescontinuously from almost zero as the coupling strength de-creases.
III. SUMMARY AND DISCUSSION
In this paper, we considered the influence of noise onsynchronization in coupled chaotic maps. We showed thatwhen fixed points or periodic orbits embedded in the chaoticset of synchronized motions are transversally unstable, in-finitesimal noise can be amplified to a finite scale in theneighborhoods of such locations. This can lead to outbursts ofunsynchronized behavior even when the coupling is such thatthe transversal or conditional Lyapunov exponent is negative.Some experimental work with nonlinear circuits [21], [22],[25] confirms that the transversal instability of fixed points inthe neighborhood of chaotic sets of synchronized motions canlead to destabilization of synchronous operation in practice.
Thus, we established that having all negative globaltransversal Lyapunov exponents evaluated along the observedchaotic orbits is not sufficient to determine the conditionswhen two chaotic physical systems will display undisruptedsynchronization. We showed that synchronization can only berobust when the whole chaotic set of synchronized motions,including all fixed points and periodic orbits embedded in it, istransversally stable. Thus, in practical studies of synchronizedchaos, one cannot rely on the traditional transversal Lyapunovexponents analysis and should examine all potentially unstableinvariant solutions within the chaotic set in the synchronizationmanifold. The mathematical foundations for this can be foundin [23], and our exposition indicates how one is to carryout this augmented investigation in practice. The alternativeapproach to the analysis of transversal stability of the chaoticset of synchronized motions is based on the construction ofLyapunov functions (see for example [11], [26]–[28]).
In conclusion, we should note that, although in this paper wefocused on the illustration of stability issues for the regime ofsynchronized chaos, the mechanism considered here is beingstudied in connection with such phenomena as “riddled” basinsand “bubbling” of chaotic attractors [29]–[33]. In fact, thebehavior that we considered is an example of “bubbling”behavior in a problem of chaos synchronization.
APPENDIX ASTABILITY OF SYNCHRONIZED CHAOS
BASED ON CONTRACTION MAPPINGS
Using the ideas of the method of contraction mappings weshall show that for 0.8 the solution 0 in the system (1),(5) is stable for all invariant measures defined on the chaoticset of synchronized motions. This stability is guaranteed ifthere is a domain of initial conditions in the plane suchthat it encloses the chaotic set of synchronized motions andall trajectories in this domain are attracted by this chaotic set.
Let us consider the plane of variables . On thisplane we select a domain that contains the whole set ofsynchronized chaotic motions . After one iteration ofthe map, the domain will be transformed into . If onecan show that , then thisproves that is an attractor for all trajectories starting inthe domain [35]. Consider the domain in the form ofa rectangle centered at the origin of the plane, seeFig. 6. Let the sides and be parallel to the -axis andhave length . The other sides and are parallel to the

872 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 44, NO. 10, OCTOBER 1997
(a)
(b)
Fig. 6. The transformation of the rectangleABCD (see Appendix A) afterone iteration: (a)g > g0 = 0.8; (b) g < g0.
-axis and have length. We select the length such thatcovers the chaotic attractor of the driving system (1), but lessthan . This guarantees that, asincreases, thedomain will shrink monotonically along the -axis until itreaches in this projection the size the chaotic attractor in thedriving system.
The transformation of the domain along axis can bederived from the system (5). The edges of the domain aregiven by the lines and . In order to plotthe images if these edges one has to multiply these valuesof by the coefficient , see (5).Therefore, if the absolute value of this coefficient is less than1 within the domain , then the image of will be entirelyinside , that is . Analysis of the functionshows that within the domain the maximum value ofis reached at the point . The value of at this point is
. Thus, the stability of is guaranteedwhen 1, i.e., . Fig. 6(a) and (b)presents the sketches of the domainsand for the cases
0.8 and 0.8, respectively.
APPENDIX BBEHAVIOR OF CHARACTERISTIC MULTIPLIERS
IN THE NEIGHBORHOOD OF THE
TRANSVERSALLY UNSTABLE FIXED POINT
In our discussion of the mechanism of noise amplificationin our coupled maps, we noted that when the fixed point atthe origin is transversally unstable, for any arbitrarily largeone can find such that for every such that thereis an such that . Let us now demonstrate that thisis indeed so.
Introduce the point 0 such that2
(17)
2Here and throughout the Appendixf(�) is the function defined by (3).
Such point can always be found if , .Note that
for all (18)
This means that for 0 the first derivative of decreasesmonotonically. From this we can conclude that, as long asthe system remains in the region , its multipliers willgrow with each iteration, since at each stepwhere 1.
Now, let us define two more numbers
(19)
Let us consider an arbitrary point such thatand estimate its maximum multiplier. Let be such that
and so that the multiplier ofthe point grows until the iteration. By definition
(20)
Note that due to the property (18)
(21)
Thus
(22)
Let us define the integer such that and: . Then
due to (22), . In (20), all terms in the product arelarger than 1, and therefore
(23)
Furthermore, due to (18) and since , in (23) wehave
(24)
Thus
(25)
Note that is a monotonically decreasing function ofbecause, by the definition of , 1 and, by itsdefinition, is a monotonically decreasing function. Thus,for all , .
By definition of , as and, thus,as . Although we only considered
0, the results are transferred with almost no changes to theregion 0, due to the symmetry of the problem. Therefore,by taking the inverse of function we can for anyarbitrarily large number find so small that for all
.

SUSHCHIK et al.: ROBUSTNESS AND STABILITY OF SYNCHRONIZED CHAOS 873
ACKNOWLEDGMENT
The authors are grateful to V. S. Afraimovich, L. Sh.Tsimring, and M. I. Rabinovich for fruitful discussions.
REFERENCES
[1] H. Fujisaka and T. Yamada, “Stability theory of synchronized motionin coupled-oscillator systems,”Prog. Theor. Phys.,vol. 69, p. 32, 1983.
[2] V. S. Afraimovich, N. N. Verichev, and M. I. Rabinovich, “Stochasticsynchronization of oscillation in dissipative systems,”Radiophys. Quan-tum Electron.,vol. 29, pp. 795–803, 1986, [Izv. VUZ, Radiofiz., vol.29, p. 1050, 1986].
[3] L. M. Pecora and T. L. Carroll, “Synchronization in chaotic systems,”Phys. Rev. Lett.,vol. 64, pp. 821–824, 1990.
[4] Lj. Kocarev, K. S. Halle, K. Eckert, U. Parlitz, and L. O. Chua,“Experimental demonstration of secure communications via chaoticsynchronization,”Int. J. Bifurc. Chaos,vol. 2, no. 3, pp. 709–713, 1992.
[5] K. Cuomo and A. V. Oppenheim, “Circuit implementation of synchro-nized chaos with applications to communications,”Phys. Rev. Lett.,vol.71, pp. 65–68, 1993.
[6] A. R. Volkovskii and N. F. Rulkov, “Synchronous chaotic responseof a nonlinear oscillator system as a principle for the detection of theinformation component of chaos,”Tech. Phys. Lett.,vol. 19, pp. 97–99,1993, [Pis’ma Zh. Tekh. Fiz., vol. 19, p. 71, 1993].
[7] K. S. Halle, C. W. Wu, M. Itoh, and L. O. Chua, “Spread spectrumcommunications through modulation of chaos,”Int. J. Bifurc. Chaos,vol. 3, no. 2, pp. 469–477, 1993.
[8] L. Kocarev and U. Parlitz, “General approach for chaotic synchroniza-tion with applications to communication,”Phys. Rev. Lett.,vol. 74, no.25, pp. 5028–5031, 1995.
[9] E. Ott, C. Grebogi, and J. A. Yorke, “Controlling chaos,”Phys. Rev.Lett., vol. 64, pp. 1196–1199, 1990.
[10] K. Pyragas, “Continuous control of chaos, by self-controlling feedback,”Phys. Lett. A,vol. 170, pp. 421–428, 1992.
[11] C. W. Wu and L. O. Chua, “A unified framework for synchronizationand control of dynamical systems,”Int. J. Bifurc. Chaos,vol. 4, no. 4,pp. 979–998, 1994.
[12] U. Feldmann, “Synchronization of chaotic systems,” Ph.D. dissertation,Tech. Univ. Dresden, July 1995.
[13] U. Feldmann, M. Hassler, and W. Schwarz, “Communication by chaoticsignals: The inverse system approach,”Int. J. Circuit Theory Applicat.,vol. 24, pp. 551–579, 1996.
[14] R. Konnur, “Equivalence of synchronization and control of chaoticsystems,”Phys. Rev. Lett.,vol. 77, no. 14, pp. 2937–2939, 1996.
[15] A. Isidori, Nonlinear Control Systems,3rd ed. New York: Springer,1995.
[16] A. S. Pikovsky and P. Grassberger, “Symmetry breaking bifurcationsfor coupled chaotic attractors,”J. Phys. A: Math. Gen.,vol. 24, pp.4587–4597, 1991.
[17] P. Ashwin, J. Buescu, and I. Stewart, “Bubbling of attractors andsynchronization of chaotic oscillators,”Phys. Lett. A,vol. 193, pp.126–139, 1994.
[18] E. Ott and J. C. Sommerer, “Blowout bifurcations: The occurrence ofriddled basins and on-off intermittency,”Phys. Lett. A,vol. 188, pp.39–47, 1994.
[19] R. Brown, N. F. Rulkov, and N. B. Tufillaro, “Synchronization of chaoticsystems: The effects of additive noise and drift in the dynamics of thedriving,” Phys. Rev. E,vol. 50, no. 6, pp. 4488–4508, 1994.
[20] J. F. Heagy, T. L. Carroll, and L. M. Pecora, “Desynchronization byperiodic orbits,”Phys. Rev. E,vol. 52, pp. R1253–R1256, 1995.
[21] D. J. Gauthier and J. C. Bienfang, “Intermittent loss of synchronizationin coupled chaotic oscillators: Toward a new criterium for high-qualitysynchronization,”Phys. Rev. Lett.,vol. 77, pp. 1751–1754, 1996.
[22] M. M. Sushchik, “Synchronized chaotic oscillations,” Ph.D. dissertation,Univ. California, San Diego, 1996.
[23] P. Ashwin, J. Buescu, and I. Stewart, “From attractor to chaotic saddle:A tale of transverse instability,”Nonlinearity,vol. 9, pp. 703–737, 1996.
[24] B. H. Hunt and E. Ott, “Optimal periodic orbits of chaotic systems,”Phys. Rev. Lett.,vol. 76, pp. 2254–2257, 1996.
[25] N. F. Rulkov and M. M. Sushchik, “Robustness of synchronized chaoticoscillations,” Int. J. Bifurc. Chaos,vol. 7, pp. 625–643, 1997.
[26] N. N. Verichev, “Mutual synchronization of chaotic oscillations inlorentz systems,” inMethods Qual. Theory Diff. Eq.,pp. 47–57, Gorky,1986, in Russian.
[27] N. F. Rulkov, A. R. Volkovskii, A. Rodr´ıguez-Lozano, E. de R´ıo, andM. G. Velarde, “Mutual synchronization of chaotic self-oscillators withdissipative coupling,”Int. J. Bifurc. Chaos,vol. 2, no. 3, pp. 669–676,1992.
[28] D. M. Walker and A. I. Mees, “A nonlinear observer for synchronizationof chaotic systems,” 1997, to be published.
[29] S. C. Venkataramani, B. R. Hunt, and E. Ott, “Bubbling transition,”Phys. Rev. E,vol. 54, pp. 1346–1360, 1996.
[30] A. Cenys and H. Lustfeld, “Statistical properties of the noisy on-offintermittency,”J. Phys. A,vol. 29, pp. 11–20, 1996.
[31] Y.-C. Lai, C. Grebogi, J. A. Yorke, and S. C. Venkataramani, “Riddlingbifurcation in chaotic dynamical systems,”Phys. Rev. Lett.,vol. 77, pp.55–58, 1996.
[32] S. C. Venkataramani, B. R. Hunt, E. Ott, D. J. Gauthier, and J. C.Bienfang, “Transitions to bubbling in chaotic systems,”Phys. Rev. Lett.,vol. 77, pp. 5361–5364, 1996.
[33] Y.-C. Lai and C. Grebogi, “Noise-induced riddling in chaotic systems,”Phys. Rev. Lett.,vol. 77, pp. 5047–5050, 1996.
[34] J.-P. Eckmann and D. Ruelle, “Ergodic theory of chaos and strangeattractors,”Rev. Modern Phys.,vol. 57, p. 617, 1985.
[35] Iu. I. Neimark,The Method of Point Mappings in the Theory of NonlinearOscillations. Moscow: Nauka, 1972, in Russian.
Mikhail M. Sushchik, Jr. was born in Russiain 1970. He received his education in the Elec-trophysics Group of the Polytechnical Universityof Nizhni Novgorod, Russia, from 1987 to 1991.He received the Ph.D. degree in physics from theUniversity of California, San Diego (UCSD), in1996.
Currently he is working as a Researcher withRecording Physics, Inc. and with the Institute forNonlinear Science, UCSD. His primary scientificinterests are nonlinear phenomena, synchronization,
and chaotic time series analysis.
Nikolai F. Rulkov was born in Russia. He receivedthe M.S. degree in 1983 and the Ph.D. degree in1991, both in physics and mathematics, from theUniversity of Nizhny Novgorod, Russia.
In 1983, he joined the Radio Physics Departmentof the University of Nizhny Novgorod, where heworked as a Researcher until 1993. During the sametime, he taught oscillations theory at the Universityof Nizhny Novgorod and developed laboratory set-ups for experimental studies of nonlinear dynamicsand bifurcations in circuits with chaotic behavior
that were used in the course “Nonlinear Oscillations.” He has been with theInstitute for Nonlinear Science, University of California, San Diego, from June1993 through the present. His research interests are in the areas of bifurcationtheory, nonlinear phenomena, theory of synchronization, and applications ofchaotic oscillations in science and engineering.
Henry D. I. Abarbanel received the B.S. degree inphysics from the California Institute of Technology,Pasadena, in 1963, and the Ph.D. degree fromPrinceton University, Princeton, NJ, in 1966.
He is a Professor of physics and a ResearchPhysicist with Scripps Institution of Oceanography,University of California, San Diego (UCSD). Heserves as the Director of the Institute for NonlinearScience on the UCSD campus. His work has rangedfrom quantum field theory and particle physics tohis present interests in analysis and applications of
nonlinear dynamical systems. He has contributed to contemporary methodsof analysis of signals from nonlinear sources, and many of those results arecollected in his bookAnalysis of Observed Chaotic Data(New York: Springer,1996). He has served as Chair of SIAM’s Special Interest Group in DynamicalSystems and Chair of the University of California’s intercampus CoordinatingCommittee for Nonlinear Studies.