Embed Size (px)
Citation preview

Physica D 237 (2008) 2353–2364www.elsevier.com/locate/physd
Robust feed-back control of travelling waves in a class of reaction–diffusiondistributed biological systems
Carlos Vilas, Mıriam R. Garcıa, Julio R. Banga, Antonio A. Alonso∗
Process Engineering Group, IIM-CSIC, Eduardo Cabello 6, 36208 Vigo, Spain
Received 25 August 2006; received in revised form 24 January 2008; accepted 19 February 2008Available online 26 February 2008
Communicated by B. Sandstede
Abstract
Reaction–Diffusion (RD) mechanisms can describe many biological phenomena such as neuron firing in the brain, the heartbeat, cellularorganization activities or even biological disorders such as fibrillation. The FitzHugh–Nagumo (FHN) model is a particular case of RD systems.It is able to capture the key features of many biological processes and since it is relatively simple it has been widely employed during recentyears. Some examples of its predictive capabilities include the representation of the normal behavior of some physiological phenomena, related toa travelling plane wave, as well as biological disorders associated with spiral or irregular fronts. The objective of this work is to design a controllaw that is able to stabilize complex behaviors (travelling plane wave) in biological systems using the FHN model as a case study. Since, inbiological systems there usually exists a lack of detailed information on the system structure, our control law will be designed to be robust, i.e., itmust be able to reach the predefined reference regardless the presence of structural uncertainties. To this purpose, we will extend some classicalresults on the finite-dimensional robust control theory to RD systems by means of order reduction techniques, in particular the Proper OrthogonalDecomposition method.c© 2008 Elsevier B.V. All rights reserved.
Keywords: Nonlinear reaction–diffusion systems; Robust control; FitzHugh–Nagumo; Travelling plane wave; Spiral waves; Reduced order models
1. Introduction
Many biological phenomena related to cell communicationare originated by chemical or electro-chemical signals whichspread throughout the cell tissue [1–3]. The mechanisms thatgovern the spatiotemporal evolution of these signals werefirst proposed by Turing in 1952 as the chemical basis formorphogenesis [4]. He suggested that, under certain conditions,the interplay between reaction and diffusion of chemicalsmay produce heterogeneous spatial patterns of chemicalconcentration [1]. Since that paper, the reaction–diffusion(RD) mechanism has been employed to describe a numberof biological processes such as neuron firing [5], cardiacrhythms [6], visual perception in the retina [7] or cellularorganization [8].
∗ Corresponding author. Tel.: +34 986 231 930; fax: +34 986 292 762.E-mail address: [email protected] (A.A. Alonso).
0167-2789/$ - see front matter c© 2008 Elsevier B.V. All rights reserved.doi:10.1016/j.physd.2008.02.019
The normal operation of some physiological processes, suchas neuron transmission or heart activity, is related to a travellingplane wave [9,6,10], meaning by travelling plane wave aflat wave which moves along the tissue without changingits shape. In the context of heart activity, such a wave isresponsible for contraction. Although this class of systemsare electro-mechanical systems of extraordinary robustness,under certain circumstances, a sufficiently strong perturbationcan cause wave breakup. If this occurs, the plane wave cangive rise to a wandering spiral which is responsible forphysiological disorders such as arrhythmia [10,11]. Usually,the system is able to drive the spiral back to the flat waveevolution but, sometimes, the spiral enters into a chain breakingprocess giving rise to the formation of patterns with irregularforms. This behavior is related to neurological disorders[7,12] or, when describing the heart behavior, to the fibrillationphenomena [13].
Models of this class of systems are very sensible to smallchanges in the parameters. Due to the importance of these

2354 C. Vilas et al. / Physica D 237 (2008) 2353–2364
processes, dynamic and bifurcation analysis of RD systemshave been the subject of intensive research, especially in whatrefers to the detection of instability conditions leading to patternformation or spiral waves [14–18].
On the other hand, the control of RD systems has receivedconsiderable attention over recent years [19,20]. In this regard,the authors of [21] studied ways of unpinning rotating wavesby means of external electric fields. The use of external electricfields was also employed in [22] so as to prevent instabilities inthe cardiac tissue.
From another point of view, the combination of orderreduction techniques with the nonlinear control theory hasbeen employed to design control schemes to stabilize givenstationary patterns [23,24] in RD systems. This approachwas extended by Alonso and coworkers [25–27] to developrobust nonlinear controllers which were able to stabilizethe stationary or time-dependent reference trajectories. Orderreduction techniques have also been applied in the context ofbifurcation analysis [28,29] of this class of systems.
In the field of physiology, a widely employed model is thatproposed by Hodgkin and Huxley [9] to describe the neuronfiring in the nerve axon of the giant squid. A simplified versionof this model is the FitzHugh–Nagumo (FHN) [30,31]. It is ableto capture most of the qualitative dynamic features of biologicalphenomena related to the normal operation of some biologicalsystems as well as the formation of spirals and irregular fronts,associated with the disorders above mentioned.
The aim of this work is to design a control law which, byacting on the FHN system when the spiral waves are formed,is able to stabilize a given complex behavior (travelling planewave). Frequently, in biological systems, there is a lack ofdetailed information on the structure of the nonlinear (reaction)terms. For practical considerations, our control law should berobust and take into account this limitation, in other words, ithas to be able to stabilize the reference regardless the presenceof uncertainties on the system structure. In this regard, theunderlying robust feed-back logic of the controllers is designedby adapting classical results on the robust nonlinear controlof finite-dimensional systems [32] to systems described bypartial differential equations (PDEs). For this purpose, wetake advantage of the dissipative nature of RD systems toobtain a low-dimensional approximation of the system. Suchapproximation will be derived using the Proper OrthogonalDecomposition (POD) method. Note however that, althoughwe concentrate on the FHN model, the same logic could beapplied to develop controllers for a wider range of RD systemsof relevance in biology or chemical processes. These controllersshould be understood as external electro-chemical devices thatare able to compensate for signal disruption. The design andconstruction of the device would depend on the particularapplication. For instance, in reference [22] the authors avoidedinstabilities in the cardiac tissue by using a finite number ofelectrodes implanted on the heart. Nevertheless, and in order tokeep generality, in this work, emphasis will be placed on thederivation of the control logic so as to ensure the convergenceto the reference despite lack of detailed information on the
structure of the system, not on the electronic constructiondetails of such devices.
The paper is structured as follows: In Section 2, we describethe POD technique to obtain reduced order approximations ofRD systems. Next, in Section 3 we briefly describe the FHNmodel, state the control problem we will be dealing with andapply the POD technique to the case study. The control law isdeveloped in Section 4. In addition, in this section, we showits stabilizing and robustness properties at a theoretical leveland illustrate its performance through a numerical simulationexperiment. Finally, the article concludes with some commentsabout the main results of the work.
2. Low-dimensional approximation of RD systems via thePOD method
For the sake of completeness, in this section, we presentthe POD method as developed in [33,34]. This technique willbe applied in subsequent sections to obtain a low-dimensionalapproximation of the FHN system and to derive the control law.
2.1. Essentials of the proper orthogonal decomposition method
Consider the following general parabolic PDE system:
∂u
∂t= L(u)+ σ(u), (1)
defined over the spatial domain V . In Eq. (1), u represents thevector field, L(·) a general linear operator and σ(·) a generalLipschitz nonlinear function. The description of the system iscompleted with appropriate boundary and initial conditions. Asshown in [25] from standard results on Hilbert spaces [35],the solution u of system (1) can be expressed as a convergentinfinite series of the form:
u(ξ, t) =
∞∑i=1
ci (t)φi (ξ), (2)
with ξ being the spatial coordinates. Time-dependent functionsci (t) are known as modes while the spatially-dependentfunctions φi (ξ), known as eigenfunctions, are the solution ofthe following eigenvalue problem [36]:
φi (ξ) = λi
∫VK(ξ, ξ ′)φi (ξ
′)dξ ′, (3)
where K(ξ, ξ ′) represents a given kernel and each λi is aparameter known as the eigenvalue. In the case of the PODmethod, K(ξ, ξ ′) corresponds with a two point correlationkernel of the form [37]:
K(ξ, ξ ′) = limT →∞
1T
∫ T
0u(ξ, t)u(ξ ′, t)dt,
where T stands for a given time horizon and u can be obtainedeither from numerical simulation or from experiments. In theremaining of the paper, we will use the term POD to denote theeigenfunctions since they will be obtained by means of the PODtechnique. It is important to point out that the set of PODs form

C. Vilas et al. / Physica D 237 (2008) 2353–2364 2355
a complete orthonormal basis set on a Hilbert space equippedwith the following inner product and L2 norm:
〈g, h〉V =
∫V
gT hdξ, ‖g‖V = (〈g, g〉V )1/2 , (4)
so that 〈φi , φ j 〉V = δi j , with δi j being the Kronecker delta.Since the kernel K is symmetric, its eigenvalues are realnumbers. Another interesting property of the eigenvaluesresulting from Eq. (3) is that they can be ordered along the setof natural numbers N so that [38]: λ1 ≥ λ2 ≥ · · · ≥ λ j ≥ · · ·.
For convenience, let us now define the set (S, λ,N) withelements being S = {φi }
∞
i=1 and λ = {λi }∞
i=1, and thefollowing subsets of natural numbers Na and Nb. Considerthat Na is an arbitrary finite subset and Nb = N \ Na , itscomplement. These subsets will allow us to split the eigenset(S,Λ,N) into two disjoint sets: (Sa,Λa,Na) and (Sb,Λb,Nb)
with Sa = {φi }i∈Na , Λa = {λi }i∈Na and Sb and Λb beingtheir corresponding complements. In accordance, the solution(2) can be partitioned as:
u(ξ, t) =
∑i∈Na
ci (t)φi (ξ)+
∑i∈Nb
ci (t)φi (ξ) = ua + ub. (5)
Suppose now that the set Na contains the first k naturalnumbers. Then, Galerkin projection of Eq. (1) over the sets Sa
and Sb results into the following set of ODEs:
dca
dt= Laca + 〈Φa, σ (u)〉V , (6)
dcb
dt= Lbcb + 〈Φb, σ (u)〉V , (7)
where La = 〈Φa,L (Φa)〉V and Lb = 〈Φb,L (Φb)〉V .The modes and the PODs are collected in the vectors ca =
[cNa(1), cNa(2), . . . , cNa(k)]T, cb = [cNb(1), cNb(2), . . .]
T andΦa = [φNa(1)|φNa(2)| · · · |φNa(k)], Φb = [φNb(1)|φNb(2)| · · ·],respectively.
If the number of elements of the set Sa(k) is large enough,then the dynamic evolution of modes can be separated into slowand fast time scales. In this way, the modes of Sb (fast modes)relax, i.e., cb → 0 [39]. Consequently, the solution of system(1) can be approximated as:
u(ξ, t) ∼= ua(ξ, t) =
∑i∈Na
ci (t)φi (ξ). (8)
In this work, since the modes of the set Sb can be neglected, theywill be sometimes referred to as “non-relevant” modes whilethose belonging to the set Sa will be referred to as “relevant”modes.
The measure we will use to estimate the number k so that ua
can be considered a good approximation of u is the percentageof energy E captured by a given number of PODs. This measureis computed from the total amount of energy captured bythe complete set of PODs (E =
∑∞
i=1 λi ) [34] through thefollowing formula:
E(%) =
k∑i=1
λi
∞∑i=1
λi
× 100. (9)
The main advantage of the reduced order models (ROM)obtained with the POD technique is that the number k ofelements in Sa is, in general, low.
In this Section, the POD methodology was presentedin its variational (infinite-dimensional) form. However, inpractice, only a finite discrete set of measurements is availablewhich calls for a discrete counterpart version of Eq. (3).In Appendix A, we provide a description of the discreteformulation which, although equivalent, is more convenient forpractical purposes.
3. The FitzHugh–Nagumo model
In the first part of this section we will briefly describethe case study, i.e. the FHN model, then we will discuss therelations between its solutions and some biological phenomenaand, on this basis, state the control objective. In the second partwe will make use of the POD technique, described above andin Appendix A, to construct a ROM for this system.
We are considering a 2D version of the classical FHN model.The spatial domain covers the square V = {0 ≤ (x, y) ≤ 200}
and the boundary corresponds to the edges of such square.This can be formally stated as B = {(x, y)/(x = 0 and x =
200 ∀y ∈ [0, 200]), (y = 0 and y = 200 ∀x ∈ [0, 200])}.Model equations are [11]:
∂v
∂t=
(∂2v
∂x2 +∂2v
∂y2
)+ f (v)− w + p;
f (v) = (α − v)(v − 1)v, (10)
∂w
∂t= εβv − g(w); g(w) = ε(γw − δ), (11)
where v and w are the fast and the slow variables, respectively.In describing cardiac or neural activity, for instance, the fastvariable, also referred to as the activator, is directly relatedto the membrane potential, whereas w, also known as theinhibitor, collects the contributions of ions such as sodium orpotassium to the membrane current [1]. ε denotes the ratiobetween time scales for the activator and inhibitor kinetics. Theparameters 0 < α < 1, β and γ are all positive while δ = 0.Finally, in Eq. (10), p represents the control variable. Note thatthe control acts only on the activator equation. Controlling thisvariable seems to be experimentally feasible and for this reasonother authors (see [13,21,22]) have chosen this approach. Otherbiological or chemical systems might require controlling morethan one variable. System description is completed with initialand boundary conditions of the form:
v(0, x, y) = v0, w(0, x, y) = w0;dvdn
∣∣∣∣B
= 0, (12)
where n is a vector pointing outward the surface.

2356 C. Vilas et al. / Physica D 237 (2008) 2353–2364
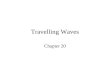
Fig. 1. Snapshot for system (10) and (11) corresponding with the travellingplane wave behavior.
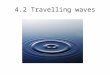
Fig. 2. Snapshot for system (10) and (11) corresponding with the spiralbehavior.
In the context of biological phenomena, such as cardiacor neural activity, the normal behavior is related to a planewave which moves along the tissue without changing its shape(travelling plane wave). The FHN system (10)–(12) reproducessuch behavior by setting the following parameters α = 0.1,ε = 0.01, β = 0.5, γ = 1 and δ = 0, and with initial conditions
v0 =
{1 if 0 ≤ x ≤ 10,∀y0 if 10 < x ≤ 200,∀y
w0 = 0 ∀(x, y). (13)
A snapshot of the activator evolution corresponding tothe travelling plane wave behavior is represented in Fig. 1.Depending on the initial conditions other rotated travellingwaves1 could be obtained [40,41]. In this work, we willconcentrate on travelling waves whose front is perpendicularto the x-axis (see Fig. 1).
Under certain circumstances the plane wave can breakforcing the front and the back of the wave to meet eachother at a given point with undefined phase [11]. Thereafter,the broken wave wanders around this point and gives rise tothe formation of a spiral. This class of behavior is relatedto neurological disorders [7] or cardiac dysfunctions suchas arrhythmia [10]. The FHN model is also able to capturethis phenomenon as illustrated in Fig. 2. The aim of thiscontribution is to design a feed-back control scheme (p) which,in the event of instability (spiral wave), should be able to drivethe system dynamics back to the plane wave behavior. To thatpurpose, we will employ a low-dimensional approximation of
1 The front of the plane wave of Fig. 1 is perpendicular to the x-axis.By rotated travelling waves we mean plane waves whose fronts are notperpendicular to the x-axis.
the desired behavior (travelling plane wave) as the referencetrajectory for the control law (note that the reference trajectoryis dynamic). The derivation of such an approximation using thePOD technique is presented in the following section.
3.1. A reduced order model for the FitzHugh–Nagumo system
The first step to construct the ROM using the POD techniqueis the derivation of a representative set of data. In our case,the snapshots, which will compose the data set, are obtainedby numerically solving system (10)–(13) with a finite elementscheme (FEM). Since the reference trajectory is the travellingplane wave behavior, the snapshots will correspond with suchbehavior. The number of discretization points used in the FEMscheme is about 2000 since finer grids do not alter significantlythe solution and coarser grids produce different results. For eachof the fields v and w, the selected data set is composed of 400snapshots collected at each 0.8 units of time. This data set isassumed to be representative of the system dynamics.
The second step is to compute each POD basis. In this casewe employ the method of snapshots described in Appendix Asince the number of elements of the data set is much lowerthan the number of discretization points in the FEM scheme.As a result of this step, two matrices are obtained: Φva =[φv1|, . . . , |φvkv
]and Φwa =
[φw1|, . . . , |φwkw
]which have
as columns the PODs for the v and w fields, respectively.kv and kw indicate two given natural numbers. Some ofthe PODs for the v field obtained with this method, arerepresented in Fig. 3. The picture illustrates that the lower theeigenvalue associated to a POD, the higher the frequency ofits spatial oscillations. In general, PODs with higher frequencyof its spatial oscillations capture faster dynamics while PODswith lower spatial oscillation frequency capture the essentialbehavior of the system. Finally, the ROM is obtained byprojecting Eqs. (10) and (11) over the matrices Φva and Φwa ,respectively, resulting into a system of ODEs of the form ofEq. (6):
dcva
dt= Lacva + 〈Φva, f 〉V − 〈Φva, w〉V + 〈Φva, pa〉V , (14)
dcwa
dt= 〈Φwa, g〉V − εβ〈Φwa, v〉V , (15)
where cva = [cv1, . . . , cvkv ]T, cwa = [cw1, . . . , cwkw ]
T andp = 0. Similarly, the initial conditions for the resulting ODEsystem are recovered by projecting (13) over the sets Sva andSwa , so that:
cv0 = 〈Φva, v0〉V , cw0 = 〈Φwa, w0〉V . (16)
The energy captured by the PODs – see Eq. (9) – is representedin Fig. 4 as a function of the number of PODs. As one can seein it, the lower the number of PODs, the lower the capturedenergy which may cause poor agreement between the realmodel and the ROM. In order to illustrate this point, twoROMs constructed with a number of PODs collecting differentamounts of energy are considered. Table 1 shows a comparison,in terms of captured energy and number of equations, betweenthe different ROMs and the FEM. The Table highlights the

C. Vilas et al. / Physica D 237 (2008) 2353–2364 2357
Fig. 3. Some PODs employed for the description of the activator (v).
fact that the ROMs drastically reduce the number of modelequations as compared with the FEM. In order to compare thedegree of accuracy of the different ROMs, the results (in modeform) obtained with the FEM (lines) are plotted together withthe ROM solutions (marks) in Fig. 5. For reasons of clarity, onlythe three most relevant modes for the v-field were represented.As shown in this picture, the first ROM (crosses) is only able toreproduce the system behavior at a qualitative level, while thesecond ROM (circles) results into a much better approximationof the FEM scheme. In fact, by recovering the field from themodes of the second simulation (Fig. 6) the essential spatio-temporal features of the FEM model are preserved. This secondROM will be employed in the control law as the referencetrajectory.
4. The control law
As mentioned in Section 3, the control objective is to actuateon a system exhibiting the spiral so as to bring it back tothe travelling plane wave behavior. It is worth mentioningthat, in this case, the reference trajectory is a low-dimensionalapproximation of the travelling plane wave behavior, but
Fig. 4. Energy captured by the low-dimensional set as a function of the numberof PODs chosen.
other reference trajectories could be considered (for instance,periodical sequences of plane waves). In this section we willdescribe the control law designed to achieve the objective andwill apply it to the FHN in a simulation experiment.
As said above, we deal with the problem of lack ofinformation by combining classical results in the robustnonlinear control of finite-dimensional systems, namely the

2358 C. Vilas et al. / Physica D 237 (2008) 2353–2364
Fig. 5. Comparison between the modes obtained with the finite element scheme(lines) and using ROMs capturing the 99% (crosses) and 99.9% (circles) of theenergy.
Table 1Comparison between the FEM and two different ROMs capturing the 99% andthe 99.9% of the energy
Method Captured energy(%)
N. eqns(v-field)
N. eqns(w-field)
N. eqns total
FirstROM
99 20 9 29
SecondROM
99.9 32 13 45
FEM 100 2342 2342 4684
Lyapunov redesign technique [32,26,27], with the PODmethod. Fig. 7 illustrates the qualitative behavior of a systemof the form:
du
dt= κu + f (u)+ p
under the control law designed with such technique. In theformer equation, u is the state, f (u) represents a givenunknown nonlinear function and p is the control variable. Forthe sake of clarity, u is considered as a scalar variable in thisexample. In the picture one can see that, at the first instance,the control law drives the state u to the set point at a exponentialrate. Once the state reaches a given region around the reference(delimited in the figure by g(θ)), it will remain in it in thefuture, that is, the response becomes ultimately bounded. It isworth mentioning that this region can be arbitrarily reduced byappropriate tuning of the controller parameters although at theexpenses of larger control efforts.
Before proceeding with the derivation of the controllerlogic let us partition the control law (which is assumed to beLipschitz [27]) using the subsets of natural numbers Na andNb defined in Section 2:
p(ξ, t) =
∞∑i=1
πi (t)φi (ξ) =
∑i∈Na
πi (t)φi (ξ)+
∑i∈Nb
πi (t)φi (ξ)
= pa + pb.
Since the PODs are orthogonal, the following relations hold:
〈Φva, p〉V = 〈Φva, pa〉V ; 〈Φvb, p〉V = 〈Φvb, pb〉V . (17)
Fig. 6. v-field representation obtained with the ROM which captures the 99.9%of energy.
For convenience, the system to control will be representedin deviation form with respect to the reference. In this case, thereference which takes the form:
dc∗va
dt= Lac∗
va + 〈Φva, f ∗〉V − 〈Φva, w
∗〉V
+ 〈Φva, p∗a〉V , (18)
c∗
vb = 0; c∗
wb = 0 (19)
is a ROM of the travelling plane wave solution. For illustrativepurposes the initial conditions of the reference, which startswhen the control law enters in action, are those indicated in Eq.(13). It is worth mentioning that other initial conditions couldbe employed. Note that the relations in expression (17) havebeen employed in the projection. On the other hand, the spiralbehavior (system to control), in mode form, is given by:
dcva
dt= Lacva + 〈Φva, f 〉V − 〈Φva, w〉V + 〈Φva, pa〉V , (20)
dcvb
dt= Lbcvb + 〈Φvb, f 〉V − 〈Φvb, w〉V + 〈Φvb, pb〉V . (21)
The system in deviation form is obtained by subtracting system(20) and (21) from the reference (18) and (19):
dcva
dt= Lacva + 〈Φva, f 〉V − 〈Φva, w〉V + 〈Φva, pa〉V , (22)
dcvb
dt= Lbcvb + 〈Φvb, f 〉V − 〈Φvb, w〉V + 〈Φvb, pb〉V . (23)
Control operation will be set up so as to attain the followingcomplementary objectives: pb will stabilize those modesassociated with the subset (Sb,Λb,Nb) (21) and pa will forcethe remaining to follow the reference trajectory given in Eqs.(18) and (19). Note that both objectives are equivalent tostabilize cva and cvb in the system in deviation form. The stepsto obtain the explicit form of pa are stated below. The same lineof arguments applies to obtain the expression of pb.
The first step is to choose a non-negative convex function.A possible candidate is Wa =
12
(cTvacva
)although other
functions could be employed [25,27]. Time derivative of Waleads to:
dWa
dt= cT
vadcva
dt
= cTvaLacva + 〈va, f 〉V − 〈va, w〉V + 〈va, pa〉V . (24)

C. Vilas et al. / Physica D 237 (2008) 2353–2364 2359
Fig. 7. Evolution of a finite-dimensional system under a control law designed with the Lyapunov redesign technique.
Since the nonlinear function is Lipschitz, it can be partitionedas
f = f a + f b =
∑i∈Na
ϑi (t)φi (ξ)+
∑i∈Nb
ϑi (t)φi (ξ).
Using the orthonormality property of the PODs, it followsthat 〈va, f 〉V = 〈va, f a〉V . Denoting by λma the maximumeigenvalue of La , this is λma = maxλLa , expression (24)becomes:
dWa
dt≤ λmacT
vacva + 〈va, f a〉V − 〈va, wa〉V + 〈va, pa〉V .
The explicit form of f is assumed to be unknown, butsome information on this term is available. In our case, suchinformation includes bounds on the nonlinear terms: η∗ >
‖ f a‖V and η > ‖ f b‖V . Introducing η∗ in the previousinequality, and using the Schwarz’s inequality, results in
dWa
dt≤ 2λmaWa + ‖va‖V ‖η∗
‖V − 〈va, wa〉V + 〈va, pa〉V .
If the control law pa drives function Wa to zero then it willalso drive cva to zero and then cva → c∗
va . Let us choose thefollowing expression for pa
pa =
wa − ω∗va − η∗
va
‖va‖Vif η∗
‖va‖V ≥ θa
wa − ω∗va − (η∗)2va
θaif η∗
‖va‖V < θa,
(25)
where ω∗ > 2|λma |. Substituting pa on the previous inequalityforWa , two cases arise
• If η∗‖va‖V ≥ θa then
dWa
dt≤ χWa,
where χ = 2λma − ω∗ < 0. Using the Gronwall–BellmanLemma [32], results that Wa , and thus cva , exponentiallytend to zero as t → ∞.
• If η‖va‖V < θa then
dWa
dt≤ χWa + η∗
‖va‖V − (η∗)2‖va‖
2V
θa.
Function ψa = η∗‖va‖V − (η∗)2
‖va‖2V
θahas a maximum
value of ψa = θa/4 thus we have that:
dWa
dt≤ χWa + θa/4 ⇒ lim
t→∞Wa = −
θa
4χ,
which means thatWa is ultimately bounded.It is easy to see that, since uncertainties are considered,exponential convergence to zero cannot be ensured because ofthe discontinuity in the term −η∗va/‖va‖V when ‖va‖V → 0.Note also that this control law allows the convergence of thestate to a region arbitrarily close to the reference by decreasingthe parameter θa but at the expenses of higher control efforts.
The same line of arguments applies to obtain an expressionfor pb:
pb =
wb − ωvb − η
vb
‖vb‖Vif η‖vb‖V ≥ θb
wb − ωvb − η2 vb
θbif η‖vb‖V < θb,
(26)
where η > ‖ f b‖V , ω > 2λmb with λmb = maxλLb.The stability and convergence analysis of this control law isincluded in Appendix B. Control law pb (which ensures thestabilization of the modes cvb) is essential for the convergenceof closed loop system to the desired reference trajectory. Thisfact will be illustrated in the following section through anumerical simulation experiment.
The fields (va , vb) and (wa , wb) are computed frommeasurements of v and w, respectively, over the whole domainthrough:
va =
k∑i=1
φvi 〈φvi , v〉V ; vb = v − va;
wa =
k∑i=1
φwi 〈φwi , w〉V ; wb = w − wa .
Note that control laws (pa) and (pb) imply to takemeasurements of v and w fields and to actuate over the wholedomain. In order to experimentally implement this control law,a number of electro-chemical devices equal to the number ofdiscretization points (about 2000) would be needed. Futureresearch will concentrate on the construction of a control lawbeing able to achieve the same objective but using a low numberof actuators.

2360 C. Vilas et al. / Physica D 237 (2008) 2353–2364
Fig. 8. Evolution of some modes under the control law (25) and (26). (a) Three modes which are representative of the plane wave behavior, (b) three modesnegligible in the plane wave behavior.
Table 2Functions and parameters used in the control law
ω∗ ω η∗ ρ
0.62 0.07 10 maxV ρ |va |(|va |2+ 3(|v∗a |
2+|v∗a ||va |)+ (α+ 1)(|va |
+2|v∗a |)− α)
η θa θb‖v‖V 0.001 0.001
4.1. Numerical simulation experiment
In this section we will illustrate the stability properties ofthe control law through a numerical simulation experiment.The experiment consists of three parts. (I) First, we use initialconditions (13) in system (10)–(12) so as to obtain the travellingplane wave behavior. (II) Then, we introduce a perturbation soas to produce a spiral. Such a perturbation consists of resettingthe superior half plane — see [11] for details. (III) Once thespiral is formed, the control law (25) and (26) is switched onin order to drive the system back to the plane wave behavior.The values of the control parameters used in the experiment areindicated in Table 2. Fig. 8(a) and (b) show the evolution ofsome “relevant” and “non-relevant” modes, respectively, underthe control law. In this picture one can see that, the modesstart to behave like in the travelling plane wave case. Whenthe perturbation is introduced (t = 80) their dynamic behaviorcompletely changes indicating that the spiral is being formed.Note in Fig. 8(b) that some modes, which in the plane wavecase were considered as “non-relevant” of the system behavior,may become relevant when describing the spiral evolution. Thisis the reason why they must be stabilized. Finally, when thecontrol law enters in action at t = 270 the “relevant” modes areforced to follow the reference trajectory (travelling plane wavebehavior). This can be seen when comparing in Fig. 8(a), themode evolution in regions I and III. At this point (t = 270), the“non-relevant” modes are stabilized (region III in Fig. 8(b)).As pointed out before, the slight differences between thereference and the controlled modes can be arbitrarily reducedby decreasing the values of θa and θb but at the expensesof larger control efforts. The effect of the controllers on thev-field is illustrated in Fig. 9 where four snapshots are depicted.It must be stressed that the control law (25) and (26) was
designed so as to stabilize the reference regardless the actualdynamic behavior of the system or the initial conditions ofthe reference and, although a particular spiral wave (arbitrarilychosen among a wide range of solutions) has been employedfor illustration purposes, the stability properties of the controllaw hold in other possible situations.
Four snapshots of the distribution for the control effort atgiven times are shown in Fig. 10. The two snapshots at thetop correspond with the control law in the transition periodt = 270.1 and t = 270.2 while the snapshots at the bottomcorrespond with the control law at times t = 300 and t = 340.
The time evolution of the control effort for the control laws,pa (dots), pb (crosses) and p (line), is represented in Fig. 11(a)by means of its norm as defined in Eq. (4).
Fig. 11(b) shows the value of the of the control law at threedifferent points of the spatial domain. The location of thesepoints are (16, 38), (70, 167) and (161, 89) where the firstand the second numbers of each pair indicate the x and they spatial coordinates, respectively. It is worth mentioning thatother authors [28,29,42] working in the FHN model, employcontrol laws producing inputs in the same order of magnitudeas those proposed in this work.
Finally, in order to illustrate the importance of pb, theexperiment has been repeated but this time, without stabilizingthe modes cvb, i.e. applying only control law pa . Fig. 12 depictsthe time evolution of some modes belonging to the sets cva(Fig. 12(a)) and cvb (Fig. 12(b)).
As shown in the picture, the modes of the set cva follow thereference trajectory c∗
va (see regions II and III in Fig. 12(a))while the modes of the set cvb may become unstable (compareregions I and III in Fig. 12(b)). The effect of the unstable modesof the set cvb on the field v is shown in Fig. 13. This pictureillustrates that the control law is not able to drive the systemto the plane wave due to the effect of the uncontrolled modes(cvb).
5. Conclusions
In this work, a feed-back control scheme that is ableto stabilize complex behaviors (travelling plane wave) indistributed biological systems has been designed. The controllogic was constructed so as to enforce and preserve its stability

C. Vilas et al. / Physica D 237 (2008) 2353–2364 2361
Fig. 9. Evolution of the FHN system under the control law (25) and (26). (a) Before entering the control law, (b) and (c) transition period, (d) system under control.
Fig. 10. Snapshots of the control law at times t = 270.1, t = 270.2, t = 300 and t = 340.
under the presence of uncertainties and lack of information onthe system structure. In this way, classical results on robustcontrol of finite-dimensional systems, namely the Lyapunovredesign technique, have been used and extended to systemsdescribed by PDEs. To that purpose, we have taken advantageof the dissipative nature of the system which allowed us theconstruction of a ROM using the POD technique. On this basis,
the control law was designed so as to force the “relevant”modes to follow the reference trajectory, which encodes thetravelling plane wave, while stabilizing the remaining ones.Since the FHN system is able to reproduce in a qualitativemanner the behavior of some interesting biological processes,it was selected as our case study to demonstrate the stabilityproperties of our control law. Although these controllers were

2362 C. Vilas et al. / Physica D 237 (2008) 2353–2364
Fig. 11. Control effort measured (a) using the norm as defined in Eq. (4) and (b) using the value of the control law in three points of the spatial domain.
Fig. 12. Mode evolution of the FHN system when applying only control law pa . (a) Three modes belonging to the set cva , (b) three modes belonging to the set cvb .
Fig. 13. Effect of the unstable cvb modes on the activator (v-field).
applied to this particular case of RD system they could be easilyextended to other processes which share the same dissipativeproperties.
Acknowledgements
The authors acknowledge financial support received fromthe Spanish Government (MCyT Project DPI2004-07444-C04-03) and Xunta de Galicia (PGIDIT02-PXIC40209PN).
Appendix A. Constructing a POD basis from a discrete setof data
Let us denote by Ui (snapshot) the vector of values of thefield u(ξ, t) at a finite (N ) number of spatial points and at agiven time ti . The problem is stated as follows: Given a set
of snapshots U = {Ui }`i=1, find a basis Φ = [φ1, φ2, . . . , φk]
which maximizes the projection over the original set U. Notealso that in infinite dimensions, the problem is formally statedas [33]:
maxΦJ = max
Φ
(1`
∑i=1
〈Φ, ui 〉2V − λ (〈Φ,Φ〉V − 1)
),
where ` represents a sufficiently large number of snapshotsrepresentative of the system behavior. The solution of thisoptimization problem, in its discrete version, leads to theassociated eigenvalue problem (3) with
K =1`
∑i=1
UiUTi . (A.1)

C. Vilas et al. / Physica D 237 (2008) 2353–2364 2363
It must be pointed out that for large values of N , solving Eq. (3)can be computationally involved. In order to avoid this problem,a useful alternative, proposed in [34] and known as the methodof snapshots or strobes, is briefly discussed. In this method,each eigenfunction is expressed in terms of the original dataas:
φ j =
∑i=1
z ji Ui , (A.2)
where z ji are the weights to be computed. To this purpose, the
following matrix is defined
Mi j =1`〈Ui ,U j 〉V . (A.3)
Introducing Eqs. (A.1) and (A.2) in the eigenvalue problem (3),results into:
MZ j = λ jZ j , (A.4)
where the eigenvectors Z j have as element the weights in
Eq. (A.2) so that Z j = [z j1, z j
2, . . . , z j` ]
T.
Appendix B. Stability proof of the control law
Let us define the Lyapunov functionWb = 1/2(cTvbcvb) and
compute its time derivative along the trajectories (23) so that:
dWb
dt= cT
vbcvb
dt= cT
vbLbcvb + 〈vb, f 〉V − 〈vb, w〉V + 〈vb, pb〉V ,
the nonlinear function is Lipschitz so it can be partitioned as
f = f a + f b =
∑i∈Na
ϑi (t)φi (ξ)+
∑i∈Nb
ϑi (t)φi (ξ).
Using the orthonormality property of the PODs, it follows that〈vb, f 〉V = 〈vb, f b〉V . Choosing the maximum eigenvalue ofLb, λmb = maxλLb we obtain:
dWb
dt≤ λm2Wb + ‖vb‖V ‖ f b‖V − 〈vb, w〉V + 〈vb, pb〉V ,
introducing in this inequality the control law (26), two cases areconsidered:
• If η‖vb‖V ≥ θb then
dWb
dt≤ 2(λm − ω)Wb + ‖vb‖V ‖ f b‖V − η‖vb‖V .
We make use of the bound on the nonlinear term and chooseη > ‖ f b‖V and ω > |λmb|, where | · | is the modulus(absolute value), so that:
dWb
dt≤ χWb, (B.1)
where χ = 2(λmb − ω) < 0. Using the Gronwall–BellmanLemma [32], Eq. (B.1) implies that Wb, and thus cvb,exponentially tend to zero as t → ∞.
• If η‖vb‖V < θb then
dWb
dt≤ 2(λm − ω)Wb + ‖vb‖V ‖ f b‖V − η2 ‖vb‖
2V
θb
≤ χWb + η‖vb‖V − η2 ‖vb‖2V
θb.
Function ψb = η‖vb‖V −η2 ‖vb‖2V
θbhas a maximum value of
ψb = θb/4 so that:
dWb
dt≤ χWb + θb/4 ⇒ lim
t→∞Wb = −
θb
4χ,
which means thatWb is ultimately bounded. �
References
[1] J.D. Murray, Mathematical Biology II: Spatial Models and BiomedicalApplications, 3rd edition, Springer-Verlag, Berlin, 2002.
[2] J. Stelling, U. Sauer, Z. Szallasi, F.J. Doyle III, J. Doyle, Robustness ofcellular functions, Cell 118 (6) (2004) 675–685.
[3] Y. Jin, J. Xu, W. Zhang, J. Luo, Q. Xu, Simulation of biological wavesin single-species bacillus system governed by birth and death-diffusiondynamical equation, Math. Comput. Simul. 68 (2005) 317–327.
[4] A.M. Turing, The chemical basis of morphogenesis, Philos. Trans. R. Soc.Lond. Ser. B 237 (1952) 37–72.
[5] J.D. Murray, Mathematical Biology I: An Introduction, 3rd edition,Springer-Verlag, Berlin, 2002.
[6] F.H. Fenton, A. Karma, Vortex dynamics in three-dimensional continuousmyocardium with fiber rotation: Filament instability and fibrillation,Chaos 8 (1998) 20–47.
[7] N.A. Gorelova, J. Bures, Spiral waves of spreading depression in theisolated chicken retina, J. Neurobiol. 14 (5) (1983) 353–363.
[8] D. Lebiedz, U. Brandt-Pollmann, Manipulation of self-aggregationpatterns and waves in a reaction–diffusion system by optimal boundarycontrol strategies, Phys. Rev. Lett. 91 (20) (2003) 208301.
[9] A.L. Hodgkin, A.F. Huxley, A quantitative description of membranecurrent and its application to conduction and excitation in nerve,J. Physiol. 117 (1952) 500–544.
[10] F.X. Witkowski, L.J. Leon, P.A. Penkoske, W.R. Giles, M.L. Spano,W.L. Ditto, A.T. Winfree, Spatiotemporal evolution of ventricularfibrillation, Nature 392 (1998) 78–82.
[11] F.H. Fenton, E.M. Cherry, H.M. Hastings, S.J. Evans, Real-time computersimulations of excitable media: Java as a scientific language and as awrapper for c and fortran programs, Biosystems 64 (2002) 73–96.
[12] M.A. Dahlem, S.C. Muller, Image processing techniques applied toexcitation waves in the chicken retina, Methods 21 (2000) 317–323.
[13] J.P. Keener, The topology of defibrillation, J. Theoret. Biol. 203 (2004)459–473.
[14] M.G. Zimmermann, S.O. Firle, M.A. Natiello, M. Hildebrand,M. Eiswirth, M. Bar, A.K. Bangia, I.G. Kevrekidis, Pulse bifurcationand transition to spatiotemporal chaos in an excitable reaction–diffusionmodel, Physica D 110 (1997) 92–104.
[15] J. Beaumont, N. Davidenko, J.M. Davidenko, J. Jalife, Spiral waves intwo-dimensional models of ventricular muscle: Formation of a stationarycore, Biophys. J. 75 (1998) 1–14.
[16] C.W. Gear, I.G. Kevrekidis, C. Theodoropoulos, Coarse integra-tion/bifurcation analysis via microscopic simulators: Micro-galerkinmethods, Comput. Chem. Eng. 26 (2002) 941–963.
[17] S. Bouzat, H.S. Wio, Influence of boundary conditions on the dynamicsof oscillatory media, Physica A 317 (2003) 472–486.
[18] G. Sweers, W.C. Troy, On the bifurcation curve for an elliptic system offitzhugh-nagumo type, Physica D 177 (2003) 1–22.
[19] M.A. Peletier, H.V. Westerhoff, B.N. Kholodenko, Control of spatiallyheterogeneous and time-varying cellular reaction networks: A newsummation law, J. Theoret. Biol. 225 (2003) 477–487.

2364 C. Vilas et al. / Physica D 237 (2008) 2353–2364
[20] V.S. Zykov, H. Engel, Feedback-mediated control of spiral waves, PhysicaD 199 (2004) 243–263.
[21] A. Pumir, V. Krinsky, Unspinnig of a rotating wave in cardiac muscle byan electric field, J. Theoret. Biol. 199 (1999) 311–319.
[22] W.J. Rappel, F.H. Fenton, A. Karma, Spatiotemporal control of waveinstabilities in cardiac tissue, Phys. Rev. Lett. 83 (2) (1999) 456–459.
[23] A.A. Alonso, B.E. Ydstie, Stabilization of distributed systems usingirreversible thermodynamics, Automatica 37 (11) (2001) 1739–1755.
[24] P.D. Christofides, Nonlinear and Robust Control of PDE Systems:Methods and Applications to Transport-Reaction Processes, Birkhauser,Boston, 2001.
[25] A.A. Alonso, C.V. Fernandez, J.R. Banga, Dissipative systems: Fromphysics to robust nonlinear control, Int. J. Robust Nonlinear Control 14(2) (2004) 157–179.
[26] C. Vilas, M.R. Garcıa, J.R. Banga, A.A. Alonso, Stabilization ofinhomogeneous patterns in a diffusion–reaction system under structuraland parametric uncertainties, J. Theoret. Biol. 241 (2) (2006) 295–306.
[27] C. Vilas, M.R. Garcıa, J.R. Banga, A.A. Alonso, Robust feed-back controlof distributed chemical reaction systems, Chem. Eng. Sci. 62 (11) (2007)2941–2957.
[28] S.Y. Shvartsman, I.G. Kevrekidis, Nonlinear model reduction for controlof distributed systems: A computer–assisted study, AIChE J. 44 (7) (1998)1579–1595.
[29] S.Y. Shvarstman, C. Theodoropoulos, R. Rico-Martınez, I.G. Kevrekidis,E.S. Titi, T.J. Mountziaris, Order reduction for nonlinear dynamic modelsof distributed reacting systems, J. Process. Cont. 10 (2000) 177–184.
[30] R. FitzHugh, Impulses and physiological states in theoretical models ofnerve membrane, Biophys. J. 1 (1961) 445–466.
[31] J. Nagumo, S. Arimoto, Y. Yoshizawa, Active pulse transmission line
simulating nerve axon, Proc. Inst. Radio. Eng. 50 (1962) 2061–2070.[32] H.K. Khalil, Nonlinear Systems, 2nd edition, Prentice Hall, Upper Saddle
River, New Jersey, 1996.[33] P.J. Holmes, J.L. Lumley, G. Berkooz, J.C. Mattingly, R.W. Wittenberg,
Low-dimensional models of coherent structures in turbulence, Phys. Rep.287 (4) (1997) 337–384.
[34] L. Sirovich, Turbulence and the dynamics of coherent structures. Part I:Coherent structures, Quaterly Appl. Math. 45 (3) (1987) 561–571.
[35] R. Courant, D. Hilbert, Methods of Mathematical Physics, 1st edition,John Wiley & Sons, New York, USA, 1989.
[36] A.A. Alonso, C.E. Frouzakis, I.G. Kevrekidis, Optimal sensor placementfor state reconstruction of distributed process systems, AIChE J. 50 (7)(2004) 1438–1452.
[37] A.A. Alonso, I.G. Kevrekidis, J.R. Banga, C.E. Frouzakis, Optimalsensor location and reduced order observer design for distributed processsystems, Comput. Chem. Eng. 28 (1–2) (2004) 27–35.
[38] P.D. Christofides, P. Daoutidis, Finite-dimensional control of parabolicpde systems using approximate inertial manifolds, J. Math. Anal. Appl.216 (1997) 398–420.
[39] A.A. Alonso, I. Kevrekidis, E. Balsa-Canto, J.R. Banga, Robust nonlinearcontrol design of distributed process systems with input constraints, in:Proceedings of (IFAC 2002), Barcelona, Spain, 2002.
[40] J.G. Alford, G. Auchmuty, Rotating wave solutions of the fitzhugh-nagumo equations, J. Math. Biol. 53 (5) (2006) 797–819.
[41] N.F. Otani, R. Hwa, Topological considerations in the generation of scrollwaves in excitable and cyclical media, Physica D 77 (4) (1994) 434–455.
[42] J. Siehr, S. Mommer, O. Slaby, D. Lebiedz, Targeting characteristicwave properties in reaction–diffusion systems by optimization of externalforcing, Phys. Rev. E 76 (5) (2007) 056211.