Embed Size (px)
Citation preview

ROBUST ESTIMATION FOR DIFFERENTIAL
EQUATIONS, TIME SERIES ANALYSIS ON CLIMATE
CHANGE AND MCMC SIMULATION OF
DURATION-OF-LOAD PROBLEM
by
Jia Xu
Master of Science, Zhejiang University, 2006-2008
Bachelor of Science, Zhejiang University, 2002-2006
THESIS SUBMITTED IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE
IN THE DEPARTMENT
OF
STATISTICS AND ACTUARIAL SCIENCE
c© Jia Xu 2010
SIMON FRASER UNIVERSITY
Summer 2010All rights reserved. However, in accordance with the Copyright Act of Canada,this work may be reproduced, without authorization, under the conditions forFair Dealing. Therefore, limited reproduction of this work for the purposes ofprivate study, research, criticism, review, and news reporting is likely to be
in accordance with the law, particularly if cited appropriately.

APPROVAL
Name: Jia Xu
Degree: Master of Science
Title of Thesis: Robust Estimation for Differential Equations, Time Series
Analysis on Climate Change and MCMC Simulation of Duration-
of-load Problem
Examining Committee: Dr. Derek Bingham
Associate Professor of Statistics and Actuarial Science (Chair)
Dr. Jiguo Cao
Supervisor
Assistant Professor of Statistics and Actuarial
Science
Dr. Leilei Zeng
Assistant Professor of Statistics and Actuarial
Science
Faculty of Health Sciences
Dr. Zhaosong Lu
External Examiner
Assistant Professor of Mathematics
Date Approved:
ii

Abstract
Usually we need to estimate the unknown parameters of Ordinary Differential Equations
based on given data. We propose a robust method in which the parameters are estimated in
two levels of optimization. Simulation studies show that the robust method gives satisfac-
tory results. We also apply the robust method to a real ecological data set.
Standard normal homogeneity test and Yao and Davis’ test aretwo widely used meth-
ods in climate study. We generate data from four models and examine whether these two
tests are sensitive to different models. We also apply thesemethods to the climate data of
Barkerville, BC.
Duration-of-load problem is of great importance in wood engineering. We present lit-
erature reviews of three papers in this field. Then we conductMarkov Chain Monte Carlo
simulation to explore the empirical probability densitiesof the break time of lumbers under
different models.
Keywords: ordinary differential equation, generalized profiling method, robust method,
climate study, standard normal homogeneity test, Yao and Davis’ test, Markov Chain Monte
Carlo, MCMC, Duration-of-load
iii

Acknowledgments
I give my enduring gratitude to the faculty, staff and my fellow students at the SFU De-
partment of Statistics and Actuarial Science, who have combined to create a stimulating
environment for research in my field. I owe particular thanksto Dr. Jiguo Cao, who taught
me how to question more deeply and solve practical problems.
I thank Dr. Derek Bingham, Dr. Leilei Zeng and Dr. Zhaosong Lufor spending time
reading my thesis and also giving valuable suggestions. I also thank them for supervising
my defense as committee members.
I thank Dr. Peter Guttorp from University of Washington for supervising the climate
study project and giving valuable ideas on how to conduct theanalysis for the climate data
of Barkerville. I thank Dr. Charmaine Dean for providing thefund for the climate study. I
also thank Mr. Paul Whitfield from SFU for providing the climate data of Barkerville and
giving useful suggestions on the interpretation of the climate data set.
I also thank my fellow student Jing Cai for programming in Matlab and Winbugs for
MCMC simulation of the Duration-of-load problem and generating Figure 11.1, Figure
11.2, Table 12.1 and Table 12.2.
iv

Contents
Approval ii
Abstract iii
Acknowledgments iv
Contents v
List of Figures viii
List of Tables x
1 Introduction 1
1.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 One Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Generalized Profiling Method . . . . . . . . . . . . . . . . . . . . . . .. . 3
1.3.1 ODE Model with Single Component . . . . . . . . . . . . . . . . . 3
1.3.2 ODE Model with Multiple Components . . . . . . . . . . . . . . . 6
1.3.3 Selection of the Smoothing Parameter . . . . . . . . . . . . . .. . 7
1.3.4 B-spline Basis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Robust Method 10
2.1 ODE Model with Single Component . . . . . . . . . . . . . . . . . . . . .11
2.2 ODE Model with Multiple Components . . . . . . . . . . . . . . . . . .. 12
2.3 Selection of the Smoothing Parameter . . . . . . . . . . . . . . . .. . . . 12
2.4 Relative Efficiency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
v

CONTENTS vi
2.5 Numerical Algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.5.1 Simpson’s Rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.5.2 Computation of Gradients . . . . . . . . . . . . . . . . . . . . . . 13
2.5.3 Sandwich Method . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Simulation and Application 17
3.1 Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1.1 Linear ODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1.2 FitzHugh-Nagumo Equations . . . . . . . . . . . . . . . . . . . . 24
3.2 Application to Predator-Prey Model . . . . . . . . . . . . . . . . .. . . . 30
4 Conclusion and Discussion 35
4.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5 Homogenization Tests of Climate Series 37
5.1 Standard Normal Homogeneity Test . . . . . . . . . . . . . . . . . . .. . 37
5.2 Yao and Davis’ Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.3 Linear Trend . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.4 Permutation Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6 Robustness of Homogenization Tests 42
6.1 Thick-tailed Distributions . . . . . . . . . . . . . . . . . . . . . . .. . . . 43
6.2 Autoregressive Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
6.3 Long-term Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7 Application to Barkerville, BC 51
7.1 Background of the Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7.2 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
8 Discussion 60
8.1 Lowess . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
8.2 Multiple Jumps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60

CONTENTS vii
9 Literature Review of DOL Problem 63
9.1 Load-Duration Effects in Western Hemlock Lumber . . . . . .. . . . . . . 63
9.2 Probabilistic Modeling of Duration of Load Effects in Timber Structures . . 65
9.3 Duration of Load Effects And Reliability Based Design . .. . . . . . . . . 66
10 Markov Chain Monte Carlo 70
11 Simulation 72
11.1 Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
11.2 MCMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
12 Conclusion and Discussion 76
12.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
12.2 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Appendix A: Selection of Matlab code for Chapter 3 79
Appendix B: Selection of Matlab code for Chapter 6 91
Appendix C: Selection of Winbugs code for Chapter 11 94
Bibliography 95

List of Figures
1.1 The numeric solutions of the predator-prey ODE (1.1) using the generalized
profiling parameter estimates and the parameter values given in Fussmann
et al. (2000). Observed experimental data are from Yoshida et al. (2003;
Fig. 2), with dilution ratesδ = 0.68day−1. The unit ofChlorella and
Brachionusis µmolL−1, and the unit of time is day. . . . . . . . . . . . . 4
1.2 Example of B-spline basis functions. . . . . . . . . . . . . . . . .. . . . . 8
2.1 The Huber functionρκ(r) and the first derivativedρκ/dr. . . . . . . . . . . 11
3.1 The PDF and CDF of Pareto(υ = 3,ξ = 1.5). . . . . . . . . . . . . . . . . 18
3.2 The simulated data from the linear ODE with 10 outliers added. The solid
line is the numerical solution to the linear ODE, and the outliers are marked
with circles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3 The simulated data from the FitzHugh-Nagumo ODEs with 20outliers
added. The solid line is the numerical solution to the FitzHugh-Nagumo
ODEs, and the outliers are marked with circles. . . . . . . . . . . .. . . . 26
3.4 Solutions to the predator-prey ODEs (1.1) using the parameter values as
robust estimates, generalized profiling estimates and those in Fussmann et
al. (2000). Observed experimental data are from Yoshida et al. (2003; Fig.
2), with dilution ratesδ = 0.68day−1. The circle indicates the outlier iden-
tified by robust method. The unit ofChlorellaandBrachionusis µmolL−1,
and the unit of time is day. . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6.1 Power curves of the difference version of SNHT . . . . . . . . .. . . . . . 44
6.2 Power curves of the ratio version of SNHT . . . . . . . . . . . . . .. . . . 45
viii

LIST OF FIGURES ix
6.3 Power curves of Yao & Davis’ method . . . . . . . . . . . . . . . . . . .. 46
6.4 The first panel shows an i.i.d.t(3) sequence with a jump=10 att = 500 and
the second panel shows the exponential of the sequence. . . . .. . . . . . 47
6.5 One simulated long-term memory series and its autocorrelation function
with d = 0.25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7.1 Temperature series of Barkerville . . . . . . . . . . . . . . . . . .. . . . . 52
7.2 Precipitation series of Barkerville . . . . . . . . . . . . . . . .. . . . . . 53
7.3 Histograms of detected jumps and jump times using different replacement
values with SNHT for temperature . . . . . . . . . . . . . . . . . . . . . . 54
7.4 Histograms of detected jumps and jump times using different replacement
values with Yao & Davis’ method for temperature . . . . . . . . . . .. . . 55
7.5 Histograms of detected jumps and jump times using different replacement
values with SNHT for precipitation . . . . . . . . . . . . . . . . . . . . .. 56
7.6 ACF of the modified Barkerville series . . . . . . . . . . . . . . . .. . . . 57
7.7 The result of SNHT: dash lines denote the 95% critical values. Replace
missing values with seasonal average. Use 95% critical value of LTM(0.127)
for temperature and 95% critical value of LTM(0.066) for precipitation.
There is a relocation in May, 1975(t = 1049) which may cause the last
jump of the precipitation. . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
7.8 Yao & Davis’ method: the 95% critical value of LTM(0.127)is far above
the dots (about 5.7). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.1 Lowess. The span = 10% of the sample size. . . . . . . . . . . . . . .. . . 61
8.2 Scatterplot of the differences between the estimated and the true jump times
(which can be positive or negtive). X-axis is for the first jump and Y-axis
for the second jump. The first five graphs at the first row are forjump =
0.1, 0.2, 0.3, 0.4, 0.5, etc. Each graph involves 1000 points. . . . . . . . . . 62
11.1 PDFs of break time for different models, different values ofk and different
scenarios when the data is generated from Madison model. . . .. . . . . . 75
11.2 PDFs of break time for different models, different values ofk and different
scenarios when the data is generated from EDRM model. . . . . . .. . . . 75

List of Tables
3.1 The biases, standard deviations (SDs), and root mean squared errors (RM-
SEs) of parameter estimates on 100 simulation replicates using the robust
method and the generalized profiling (GP) method. The true values of pa-
rameters areα1 = 3, andα2 = 10 . . . . . . . . . . . . . . . . . . . . . . . 22
3.2 The means and standard deviations (SDs) for the standarderror estimates
using the sandwich method over 100 simulation replicates. “Sample" rep-
resents the sample SDs of the parameter estimates. “CP" stands for the
coverage probabilities of the 95% confidence intervals for the parameters. . 25
3.3 The biases, standard deviations (SDs), and root mean squared errors (RM-
SEs) of parameter estimates on 100 simulation replicates using the robust
method and the generalized profiling (GP) method. The tuningparameter
in the Huber function,κ = 0.732σe, 0.982σe, 1.345σe , which correspond
to 85%, 90%, 95% asymptotic efficiency at the normal distribution. . . . . . 27
3.4 The means and standard deviations (SDs) for the standarderror estimates
using the sandwich method over 100 simulation replicates. “Sample" rep-
resents the sample SDs of the parameter estimates. “CP" stands for the
coverage probabilities of the 95% confidence intervals for the parameters. . 31
3.5 Parameter estimates and the standard errors (SEs) for the Predator-Prey
ODE model (1.1) from the real ecological data. MSE is defined as the
mean squared errors of the ODE solutions to the data excluding outliers.
As a comparison, we also give the parameter values given in Fussmann et
al. (2000) and the generalized profiling estimates. . . . . . . .. . . . . . . 32
x

LIST OF TABLES xi
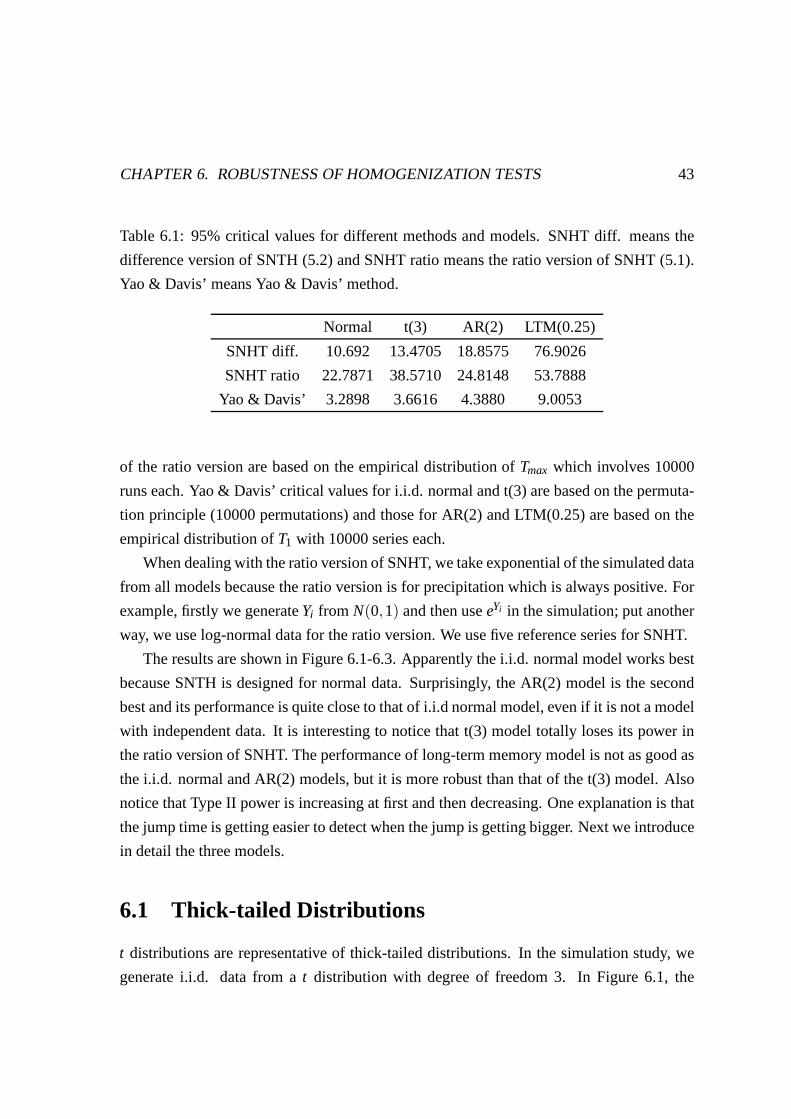
6.1 95% critical values for different methods and models. SNHT diff. means
the difference version of SNTH (5.2) and SNHT ratio means theratio ver-
sion of SNHT (5.1). Yao & Davis’ means Yao & Davis’ method. . . .. . . 43
7.1 Estimate of the LTM parameterd and its 95% CI . . . . . . . . . . . . . . 58
12.1 Mean and standard deviation (SD) for each distributionwhen the data is
generated from Madison model. . . . . . . . . . . . . . . . . . . . . . . . 77
12.2 Mean and standard deviation (SD) for each distributionwhen the data is
generated from EDRM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77

Chapter 1
Introduction
1.1 Overview
Ordinary Differential Equations (ODEs) are widely used in Biology, Economics, Finance
and other fields. The range of applications in Economics includes trade cycles, economic
chaos, urban pattern formation and economic growth (Zhang 2005). The stochastic version
of ODE - Stochastic Differential Equations (SDEs), are now heavily used in Financial En-
gineering, such as derivative pricing and risk management (Oksendal 2003). Probably the
most popular application of ODEs is in Biology, including population growth, administra-
tion of drugs, cell division and predator-prey models (Jones and Sleeman 2003).
In practice, unknown parameters are usually involved in theODEs. Given the data
available, we need to estimate the values of these parameters. If the ODEs can be solved
analytically, then the problem is relatively easy. However, it is not always the case. Actu-
ally in rear cases we can obtain the explicit expression of the ODEs. The first step is thus
to solve the ODEs numerically, and then use methods such as nonlinear, maximum likeli-
hood or Bayesian methods to approximate the parameters. Thedisadvantage of nonlinear
and maximum likelihood methods is that the result is very sensitive to the starting values
because usually there exist multiple local optimizers. Although Bayesian method can over-
come this problem, it is computationally extensive in most cases. Generalized profiling
method, which is designed as an alternative to the above methods, shows more popularity
recently (Ramsay and Silverman 2005). This method can not only effectively estimate the
parameters in ODEs but also prevent over-fitting of the modelby using a roughness penalty.
1

CHAPTER 1. INTRODUCTION 2
Usually the data we have is not perfect. There may exist outliers. A not-so-formal
approach is to plot the data and see if there are any unusual points. This is a useful method
because sometimes common sense will tell the obvious outliers from others. However,
we need a systematic method to deal with the outliers. Maronna et al. (2006) discuss the
robust method in detail. In this thesis we combine the robustmethod and the generalized
profiling method to proposal a new approach to deal with the parameter estimation problem
for ODEs.
1.2 One Example
The robust method for estimating ODE parameters is motivated by a predator-prey dy-
namic system described in Fussmann et al. (2000). An aquaticlaboratory community
containing two microbial species whose dynamic behavior isstudied by Fussmann et al.
(2000), Shertzer et al. (2002) and Yoshida et al. (2003). Thesystem is a nutrient-based
predator-prey food chain, in which unicellular green algae, Chlorella vulgaris, are eaten
by planktonic rotifers,Brachionus calyciflorus. The growth ofChlorella is also limited
by the supply of nitrogen.Chlorella andBrachionusare grown together in replicated, ex-
perimental flow-through cultures, called chemostats. Nitrogen continuously flows into the
system with concentrationN∗ at the dilution rateδ, and all variables are removed from the
chemostats at the same rateδ. Fussmann et al. (2000) mathematically model the system
using a set of nonlinear ODEs, coupled by consumer-resourceinteractions between the
planktonic rotifers, green algae, and the nitrogen resource:
dNdt
= δ(N∗−N)−FC(N)C
dCdt
= FC(N)C−FB(C)B/ε−δC
dRdt
= FB(C)R− (δ+m+α)R
dBdt
= FB(C)R− (δ+m)B (1.1)
whereN, C, R, B are the concentrations of nitrogen,Chlorella, reproducingBrachionus,
and totalBrachionus, respectively,FC(N) = bCN/(kC+N), FB(C) = bBC/(kB+C) are two
functional responses (withbC andbB the maximum birth rates ofChlorellaandBrachionus;

CHAPTER 1. INTRODUCTION 3
kC and kB the half-saturation constants ofChlorella and Brachionus), and ε, α, and m
are the assimilation efficiency, the decay of fecundity, andthe mortality ofBrachionus,
respectively.
The above dynamic model correctly predicts three qualitative types of dynamic be-
havior of the experimental system: the predator and prey coexist at an equilibrium at low
nutrient supply (smallδ or smallN∗); the system switches to a limit cycle when increasing
nutrient supply (increasingδ or N∗); very high nutrient supply leads to extreme oscillations
that cause the extinction of the predator or both the predator and the prey. However, Fuss-
mann et al. (2000) point out that their model performs poorlyat predicting quantitative
aspects of the experimental predator-prey dynamics because of the lack of knowledge on
the parameter values. Cao et al. (2008) improve the fitting ofthe ODE solution to the real
data by estimating the ODE parameters using the generalizedprofiling method.
Figure 1.1 displays the ODE solutions using the generalizedprofiling estimates and
the parameter values given in Fussmann et al. (2000). The generalized profiling method
clearly makes the ODE solutions fit the data better, which is agood validation for the ODE
model. However, one data point (marked with a circle in Figure 1.1) is too high for the
cyclic trend of the concentration of Brachionus, and may be an outlier, but the generalized
profiling method does not consider this outlier problem. Ourrobust method should further
improve the fitting of the ODE model by downweighting the impact of outliers.
1.3 Generalized Profiling Method
In this chapter we introduce a powerful method for approximating discrete data by a func-
tion - generalized profiling method (Ramsay and Silverman 2005). The key feture of this
method is the use of a roughness penalty.
1.3.1 ODE Model with Single Component
For simplicity, suppose the ODE only involves one component:
dxdt
= f (x|θ) (1.2)
whereθ is the parameter vector andx= x(t) is the dynamic process over timet.

CHAPTER 1. INTRODUCTION 4
4 6 8 10 12 14 160
20
40
60
80
Chl
orel
la
4 6 8 10 12 14 160
2
4
6
8
10
12
Time
Bra
chio
nus
DataFussmann et al. (2000)Generalized Profiling
DataFussmann et al. (2000)Generalized ProfilingPossible Outlier
Figure 1.1: The numeric solutions of the predator-prey ODE (1.1) using the generalized
profiling parameter estimates and the parameter values given in Fussmann et al. (2000).
Observed experimental data are from Yoshida et al. (2003; Fig. 2), with dilution rates
δ = 0.68day−1. The unit ofChlorella andBrachionusis µmolL−1, and the unit of time is
day.

CHAPTER 1. INTRODUCTION 5
We approximatex(t) by a linear combination of basis functions:
x(t) =K
∑k=1
ckφk(t) = cTφ(t) (1.3)
whereφk are basis functions andck are coefficients. In practice, the basis functions can be
Fourier basis, B-spline basis, wavelets and so on. We use B-spline basis because they can
accommodate the discontinuities by using multiple knots tothe time points (Ramsay and
Silverman 2005). Moreover, B-spline basis functions have aproperty called the compact
support property, which means that they are only positive over a short subinterval and zero
elsewhere. The compact support property makes the computation more efficient (More will
be covered in Section 1.3.4).
Let Y = (y1, . . . ,yn) be the observations of the dynamic process at timest1, . . . , tn. Gen-
eralized profiling method involves two steps. Theinner-optimizationminimizes
G(c|θ) =n
∑i=1
[yi −x(ti)]2+λ
∫ tn
t1[Lx(t)]2dt (1.4)
wheren
∑i=1
[yi −x(ti)]2 (1.5)
is just the sum of squares of residuals, which is equivalent to the log-likelihood under
normal assumption, and ∫ tn
t1[Lx(t)]2dt (1.6)
is defined as thepenaltyterm, which is used to control the roughness ofx(t). For instance,
operatorL can be
Lx=d2xdt2
(1.7)
if one wants to control the curvature of the functionx(t). Alternatively, we can use
Lx=dxdt
− f (x|θ) (1.8)
which serves as a measure of the deviation ofx(t) from the ODE (1.2).
λ is called thesmoothing parameter, which is a trade-off between fitting to data and
maintaining fidelity to the ODE model. There are two extreme cases: ifλ = 0, we place
total emphasis on fitting to data and the result is the same as that of least squares method;

CHAPTER 1. INTRODUCTION 6
if λ → ∞, we place total emphasis onx(t) maintaining fidelity to the ODE model. After the
inner-optimization,c or x= cTφ(t) is a function ofθ, whereT means transpose of a matrix.
Theouter-optimizationminimizes
H(θ) =n
∑i=1
[yi − c(θ)Tφ(ti)]2 (1.9)
which gives the final estimates of the parameters.
1.3.2 ODE Model with Multiple Components
In practice, there are often more than one component in the ODE model. Moreover, obser-
vations for some components may not exist or impossible to observe. Suppose we haveS
components (Ramsay and Silverman 2005):
dxℓdt
= fℓ(X|θ), ℓ= 1, . . . ,S (1.10)
whereX(t) = (x1(t), . . . ,xS(t))T. With no loss of generality, suppose only the firstM com-
ponents are observed, whereM ≤ S. Denotey j(ti j ) as the observation for thej-th compo-
nent at timeti j , i = 1, . . . ,n j , j = 1, . . . ,M . Again we express each component by a linear
combination of basis functions:
xℓ(t) = cTℓ φℓ(t), ℓ= 1, . . . ,S (1.11)
whereφℓ can be different basis systems for differentℓ. Thus, in the inner-optimization, we
minimize
G(c|θ) =M
∑j=1
ω j
n j
∑i=1
[y j(ti j )−x j(ti j )]2+
S
∑ℓ=1
λℓωℓ
∫ tn
t1[Lℓxℓ(t)]
2dt (1.12)
where
c= (cT1 , . . . ,c
TS)
T , Lℓxℓ =dxℓdt
− f (X|θ) (1.13)
andωℓ is the weight placed on componentxℓ, which can be chosen as the inverse of variance
of observations forxℓ. In the outer-optimization we minimizes
H(θ) =M
∑j=1
ω j
n j
∑i=1
[y j(ti j )− c j(θ)Tφ j(ti j )]2 (1.14)

CHAPTER 1. INTRODUCTION 7
1.3.3 Selection of the Smoothing Parameter
One problem is how to choose the value ofλ. One systematic method is calledcross-
validation (Ramsay and Silverman 2005). The basic idea is that for each value ofλ, we
leave one observation out and fit the model using the remaining part of the data, and then
estimate the fitted value for the observation left out. The procedure is repeated for each
observation in turn. Then we calculate thecross-validated error sum of squares, that is, the
resulting error sum of squares of all observations. We choose the value ofλ which mini-
mizes the cross-validated error sum of squares. However, this method is computationally
intensive (Ramsay and Silverman 2005).
In practice, we try a group of different values forλ and choose the one that minimizes
F(λ) =M
∑j=1
ω j
n j
∑i=1
[y j(ti j )−sj(ti j |θ(λ))]2 (1.15)
wheresj(ti j |θ(λ)) is the ODE solution at timeti j with the parameter estimateθ for the jth
component.
1.3.4 B-spline Basis
Spline functions are the most common choice of approximation system for non-periodic
functional data. To define a spline over an interval, first we divide the interval intoL subin-
tervals separated by breakpoints. The termbreakpointsrefers to the unique knots, while
the termknotsrefers to the sequence of values at breakpoints, where some breakpoints can
be associated with multiple knots. Over each interval, a spline is a polynomial of order
m. Theorder of a polynomial is the number of constants required to define it. Adjacent
polynomials join up smoothly at the breakpoint which separates them, so that the function
values are equal at their junction. Moreover, derivatives up to orderm−2 must also match
up at these junctions. The total number of degrees of freedomin the fit thus equals the order
of the polynomials plus the the number of interior breakpoints, that is,m+L−1 (Ramsay
and Silverman 2005).
The B-spline basis system developed by de Boor (2001) is the most popular one. The
property that an orderm B-spline basis function is positive over no more thanm intervals,

CHAPTER 1. INTRODUCTION 8
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t
φ(t
)
B−spline basis, no. of basis functions = 15, order = 6
Figure 1.2: Example of B-spline basis functions.

CHAPTER 1. INTRODUCTION 9
and that these are adjacent, is called thecompact support property, and is of the greatest
importance for efficient computation. We use B-spline basisalso because they can ac-
commodate the discontinuities by using multiple knots to the breakpoints (Ramsay and
Silverman 2005). Figure 1.2 shows one example of B-spline basis functions with order 6.

Chapter 2
Robust Method
There are several versions of definition for robustness. In this chapter,robustnessrefers to
the notion of robust estimation with respect to outliers, that is, estimation is not sensitive to
outliers.
As long as there are no outliers in the data, generalized profiling method is a good
choice for parameter estimation. In practice, however, data collection sometimes involves
some errors. Obvious outliers can be detected solely by plotting the data. For example, the
height of a person is never negative, so if there is a negativevalue in the graph of the height
data, we can find and delete it with no doubt. But some outliersare not so easy to find out
just by looking at the graph. Plus, we need a systematic way toaddress the outlier problem.
Thus, we propose the robust method in this chapter.
Firstly we introduce the family ofHuber functions (Maronna et al. 2006):
ρκ(r) =
{r2 if |r| ≤ κ2κ|r|−κ2 if |r|> κ
(2.1)
whereκ > 0 is the cutoff of the Huber functions.
Half of its derivative is
12
ρ′κ(r) =
r if |r| ≤ κ
sign(r)κ if |r|> κ(2.2)
intuitively, the above function does nothing to the valuer if |r| ≤ κ; however, if|r| > κ, it
’pulls’ the valuer to κ or−κ, depending on the sign ofr. Figure 2.1 displays one example
of the Huber function and its first derivative.
10

CHAPTER 2. ROBUST METHOD 11
−3 −2 −k 0 k 2 30
2
4
6
r
ρ(r)
−3 −2 −k 0 k 2 3−4
−2
0
2
4
r
dρ/d
r
Figure 2.1: The Huber functionρκ(r) and the first derivativedρκ/dr.
2.1 ODE Model with Single Component
Firstly we are looking atdxdt
= f (x|θ) (2.3)
Now instead of using (1.4) in the inner-optimization, we minimize
G(c|θ) =n
∑i=1
ρκ[yi −x(ti)]+λ∫ tn
t1[Lx(t)]2dt (2.4)
where
x(t) = cTφ(t), Lx=dxdt
− f (x|θ) (2.5)
and similarly in the outer-optimization, we minimize
H(θ) =n
∑i=1
ρκ[yi − c(θ)Tφ(ti)] (2.6)

CHAPTER 2. ROBUST METHOD 12
2.2 ODE Model with Multiple Components
As to the multiple components case,
dxℓdt
= fℓ(X|θ), ℓ= 1, . . . ,S (2.7)
whereX(t) = (x1(t), . . . ,xS(t))T. With no loss of generality, suppose only the firstM com-
ponents are observed, whereM ≤ S. The inner-optimization changes to
G(c|θ) =M
∑j=1
ω j
n j
∑i=1
ρκ j [y j(ti j )−x j(ti j )]+S
∑ℓ=1
λℓωℓ
∫ tn
t1[Lℓxℓ(t)]
2dt (2.8)
wherey j(ti j ) is the observation for thej-th component at timeti j , i = 1, . . . ,n j , j = 1, . . . ,M
and
xℓ(t) = cTℓ φℓ(t), ℓ= 1, . . . ,S (2.9)
c= (cT1 , . . . ,c
TS)
T , Lℓxℓ =dxℓdt
− f (X|θ) (2.10)
The outer-optimization thus changes to
H(θ) =M
∑j=1
ω j
n j
∑i=1
ρκ j [y j(ti j )− c j(θ)Tφ j(ti j )] (2.11)
2.3 Selection of the Smoothing Parameter
Although we can use cross-validation, in practice, however, we try a group of different
values ofλ and choose the one that minimizes
F(λ) =M
∑j=1
ω j
n j
∑i=1
ρκ j [y j(ti j )−sj(ti j |θ(λ))] (2.12)
wheresj(ti j |θ(λ)) is the ODE solution at the pointti j with the parameterθ for the jth com-
ponent.

CHAPTER 2. ROBUST METHOD 13
2.4 Relative Efficiency
One important concept for robust estimation is relative efficiency. Suppose there are two
estimators for a parameterθ, namely,T1 andT2. Therelative efficiencyof T2 to T1 is defined
by the ratio of their mean squared errors (Andersen 2008):
RE(T1,T2) =E(T2−θ)2
E(T1−θ)2 (2.13)
If the assumptions of linearity, constant error variance and uncorrelated errors are met,
least squares estimators are the most efficient among unbiased linear estimators (Andersen
2008). As a result, relative efficiency of a robust estimatoris assessed compared with a least
squares estimator (even if linearity is not satisfied). As toHuber functions,κ = 0.732σe,
κ = 0.982σe andκ = 1.345σe will produce 85%,90% and 95% efficiency relative to the
sample mean when the population is normal, whereσe is the standard deviation of the noise
(Fox 2008).
2.5 Numerical Algorithms
2.5.1 Simpson’s Rule
Computation of robust method involves integration. We use Simpson’s Rule, a method for
numerical integration:∫ tn
t1f (t)dt ≈ δ
3
{f (s0)+2
Q/2−1
∑q=1
f (s2q)+4Q/2
∑q=1
f (s2q−1)+ f (sQ)
}(2.14)
where the quadrature pointssq = t1+qδ, q= 0, . . . ,Q, andδ = (tn− t1)/Q. The usual error
when using ordinary integral method is asymptotically proportional to (tn− t1)5, while
Simpson’s rule will give(tn− t1)4 performance.
2.5.2 Computation of Gradients
To make the computation faster, we need the gradient ofH (2.6 or 2.11) with respect toθ.
However,H is an implicit function ofθ throughc, so we use the following relationship:
dHdθ
=
(dcdθ
)T dHdc
. (2.15)

CHAPTER 2. ROBUST METHOD 14
We use the Implicit Function Theorem to derivedc/dθ:
ddθ
(∂G∂c
∣∣∣∣c
)=
∂2G∂c∂θ
∣∣∣∣c+
∂2G∂c2
∣∣∣∣c
dcdθ
= 0. (2.16)
as a result,dcdθ
=−[
∂2G∂c2
∣∣∣∣c
]−1[ ∂2G∂c∂θ
∣∣∣∣c
](2.17)
2.5.3 Sandwich Method
An estimating equationfor parametersθ has the form (Carroll 2006)
n
∑i=1
ωiΨi(Y i ,θ) = 0 (2.18)
whereΨi is called anestimating functionandωi is its weight. The solutionθ to (2.18) is
called anM-estimatorof θ. In practice, one obtains an estimating function through some
methods, for example, maximum likelihood or least squares method. In our case, we refer
to robust method.
The estimating function is calledconditionally unbiasedif (Carroll 2006)
E
{Ψi(Y i,θ)
}= 0, i = 1, . . . ,n (2.19)
If the estimating functions are unbiased, then under certain conditionsθ is a consistent
estimator ofθ (Carroll 2006). Thus by a Taylor series approximation of∑ni=1ωiΨi(Yi , θ) =
0:n
∑i=1
ωiΨi(Yi ,θ)+{ n
∑i=1
ωi∂
∂θT Ψi(Y i,θ)}(θ−θ)≈ 0 (2.20)
thus we have
θ−θ ≈−An(θ)−1n
∑i=1
ωiΨi(Yi ,θ) (2.21)
where
An(θ) =n
∑i=1
{ωi
∂∂θT Ψi(Y i ,θ)
}(2.22)

CHAPTER 2. ROBUST METHOD 15
As a result,θ is asymptotically normally distributed with meanθ and covariance matrix
A−1n (θ)Bn(θ){A−1
n (θ)}T , where
Bn(θ) =n
∑i=1
ω2i Ψi(Yi ,θ)Ψi(Yi ,θ)T . (2.23)
A−1n (θ)Bn(θ){A−1
n (θ)}T is called thesandwich estimatorof the covariance matrix ofθ.
The sandwich method makes no assumption on the underlying distribution. However, when
a distributional model is reasonable the sandwich method istypically inefficient ,which can
inflate the length of confidence intervals (Kauermann and Carroll 2001).
Back to our problem, our estimating equation in the outer-optimization is (by 2.11)
dH(θ)dθ
=M
∑j=1
ω j
n j
∑i=1
ddθ
ρκ j
{y j(ti j )− cT
j (θ)φ j(ti j )
}= 0 (2.24)
that is,M
∑j=1
ω j
n j
∑i=1
Ψi j (Y j ,θ) = 0 (2.25)
where
Ψi j (Y j ,θ) =−(
dc j
dθ
)T
φ j(ti j )ρ′κ j
{y j(ti j )− cT
j (θ)φ j(ti j )
}(2.26)
Becauseρ′κ is symmetric about the origin and the noise is normal with mean 0, the estimat-
ing functionsΨi j (Y j ,θ) are unbiased.
The sandwich method estimates the covariance matrix ofθ as
Cov(θ) = A−1n (θ)Bn(θ){A−1
n (θ)}T (2.27)
where the two matricesAn(θ) andBn(θ) are
An(θ) =M
∑j=1
ω j
n j
∑i=1
d
dθT Ψi j (Y j ,θ) (2.28)
Bn(θ) =M
∑j=1
ω2j
n j
∑i=1
Ψi j (Y j ,θ)Ψi j (Y j ,θ)T (2.29)
The analytic derivative fordΨi j/dθT is
d
dθT Ψi j (Y j ,θ) =−K j
∑k=1
d2c jk
dθdθT φ jk(ti j )ρ′κ j{y j(ti j )−φT
j (ti j )c j(θ)}+

CHAPTER 2. ROBUST METHOD 16
(dc j
dθ
)T
φ j(ti j )ρ′′κ j{y j(ti j )−φT
j (ti j )c j(θ)}φTj (ti j )
(dc j
dθ
)(2.30)
whered2c jk/dθdθT is obtained using the Implicit Function Theorem as follows:taking the
second-orderθ-derivative on both sides of the identity∂G/∂c jk|c jk = 0, where
d2
dθdθT
(∂G
∂c jk|c jk
)=
∂3G
∂c jk∂θ∂θT
∣∣∣∣c jk
+∂3G
∂c2jk∂θ
∣∣∣∣c jk
dc jk
dθT +∂3G
∂c3jk
∣∣∣∣c jk
dc jk
dθdc jk
dθT +∂2G
∂c2jk
∣∣∣∣c jk
d2c jk
dθdθT
(2.31)
Assuming that∂2G
∂c2jk
∣∣∣∣c jk
6= 0, the analytic expression for the second-order derivativeof
c jk with respect toθ is obtained:
d2c jk
dθdθT =−[
∂2G
∂c2jk
∣∣∣∣c jk
]−1[ ∂3G
∂c jk∂θ∂θT
∣∣∣∣c jk
+∂3G
∂c2jk∂θ
∣∣∣∣c jk
dc jk
dθT +∂3G
∂c3jk
∣∣∣∣c jk
dc jk
dθdc jk
dθT
](2.32)

Chapter 3
Simulation and Application
Matlab is used for this chapter. Selection of the code is attached as Appendix A.
3.1 Simulation
In this chapter, we will use a Pareto distribution to generate the outliers. The probability
density function (PDF) of Pareto(υ,ξ) is
f (x) = υξυ/xυ+1, x> ξ (3.1)
and its cumulative density function (CDF) is
F(x) = 1− (ξ/x)υ, x> ξ (3.2)
thus the inverse function of the CDF is
F−1(y) = ξ(1−y)−1υ (3.3)
Figure 3.1 shows the PDF and CDF of Pareto(υ = 3,ξ = 1.5), which will be used in
our simulation. Note that one feature of a Pareto distribution is that the value of its density
function is 0 belowξ.
To generate a random value from a Pareto distribution, firstly we generate a random
value R from a uniform distribution:R∼ Uni f [0,1]. Then we calculateX = F−1(R),
17

CHAPTER 3. SIMULATION AND APPLICATION 18
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
Pareto(υ=3,ξ=1.5)
prob
abili
ty d
ensi
ty fu
nctio
n
0 1 2 3 4 5 60
0.5
1
1.5
Pareto(υ=3,ξ=1.5)
cum
ulat
ive
dens
ity fu
nctio
n
Figure 3.1: The PDF and CDF of Pareto(υ = 3,ξ = 1.5).

CHAPTER 3. SIMULATION AND APPLICATION 19
whereF−1(·) is the inverse function of the CDF of the Pareto distribution. ThenX is a
random sample from the Pareto distribution because
P(X ≤ x) = P(F−1(R)≤ x) = P(R≤ F(x)) = F(x) (3.4)
3.1.1 Linear ODE
When a temperature probe is firmly held between our thumb and forefinger, the temperature
of the probe may be modeled by a linear ODE (Lomen and Lovelock1996):
dx(t)dt
=−α1x(t)+α2 (3.5)
wherex(t) is approximated by a linear combination of basis functions:
x(t) =K
∑k=1
ckφk(t) (3.6)
The analytical solution to the ODE is:
x(t) =
(x(0)− α2
α1
)e−α1t +
α2
α1(3.7)
whereX(0) is the initial value.
By Simpson’s rule,
∫ tn
t1[Lx(t)]2dt =
N
∑i=1
ωi [Lx(ti)]2 = (Ac−α2)
TW(Ac−α2) (3.8)
whereN is an odd number,δ is the distance between two quadrature points, and
Lx(t) =dx(t)
dt+α1x(t)−α2 (3.9)
A= (Ai j )N×K =
(φ′j(ti)+α1φ j(ti)
)= A1+α1A0 (3.10)
W = diag(ωi) = diag
((1,4,2,4, . . . ,2,4,1)/3×δ
)(3.11)
so for the non-robust case,
G(c|α1,α2) = (Y−A0c)T(Y −A0c)+λ(Ac−α2)TW(Ac−α2) (3.12)

CHAPTER 3. SIMULATION AND APPLICATION 20
H(α1,α2) =
(Y −A0c(α1,α2)
)T(Y−A0c(α1,α2)
)(3.13)
whereY is the observation data.
For the robust case,
G(c|α1,α2) =
(√ρκ(Y −A0c)
)T(√ρκ(Y−A0c)
)+λ(Ac−α2)
TW(Ac−α2) (3.14)
H(α1,α2) =
(√ρκ(Y−A0c(α1,α2))
)T(√ρκ(Y−A0c(α1,α2))
)(3.15)
We use the following steps to generate outliers:
• Solution (3.7) is used at 101 equally-spaced points in [0,1]with the initial valuex(0) = 1
and the true parameter values(α1,α2) = (3,10).
• Add normal noise with mean 0 and standard deviationσe = 0.5 to the equally-spaced
points of the ODE solution.
• Randomly selectmobservations using the discrete uniform distribution in [1,101] as out-
lier candidates.
• For each selected observation, use a Bernoulli distribution with probability 0.5 to deter-
mine a sign, either positive or negative.
• For each selected observation, use a Pareto(υ = 3,ξ = 1.5) distribution to generate a
value.
• For each selected observation, if its related sign is positive, we add the value generated
from the Pareto distribution to this observation; if its sign is negtive, we subtract the value
generated from the Pareto distribution from this observation.
• The parameters(α1,α2) are estimated from the same simulated data using the robust
method and the generalized profiling method. Both methods represent the dynamic process
x(t) with a cubic B-spline using 101 equally-spaced knots in [0,1].
We use four different numbers of outliersm= 0, 10, 20, 30, four different values of
λ = 104, 105,106,107 and three different values ofκ = 0.732σe,0.982σe,1.345σe for the
Huber function, which are corresponding to 85%,90% and 95% relative efficiency (Fox

CHAPTER 3. SIMULATION AND APPLICATION 21
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
0
1
2
3
4
5
6
t
X
Figure 3.2: The simulated data from the linear ODE with 10 outliers added. The solid line
is the numerical solution to the linear ODE, and the outliersare marked with circles.
2008). For each combination ofm,λ andκ, the above procedure is repeated 100 times.
Figure 3.2 shows one simulated data set.
Table 3.1 displays the bias, standard deviation (SD) and root mean squared error (RMSE)
for parameter estimates on 100 simulation replicates in four scenarios whenλ = 105. The
results for other values ofλ are quite similar and thus omitted here. We can see from the
table that if there is no outliers, the robust method has 2%∼ 7% larger RMSE than the gen-
eralized profiling method. When the outliers exist in the simulated data, the robust method
has much smaller bias, SD and RMSE than the generalized profiling method. For example,
when the simulated data have 20% outliers, the RMSE of the parameter estimates using the
robust method is around 60% of that using the generalized profiling method and when the
simulated data have 30% outliers, the RMSE using the robust method is only around 50%
of that using the generalized profiling method whenκ = 1.345σe.
The standard errors (SEs) for parameter estimates are estimated using the sandwich
method. Table 3.2 shows the mean and standard deviation (SD)of the standard error esti-
mates over 100 simulation replicates. We also calculate thesample standard deviation for
the parameter estimates in the same 100 simulation replicates. The mean of the sandwich
estimates is slightly smaller than the sample standard deviation. We also calculate the 95%

CHAPTER 3. SIMULATION AND APPLICATION 22
Table 3.1: The biases, standard deviations (SDs), and root mean squared errors (RMSEs)
of parameter estimates on 100 simulation replicates using the robust method and the gen-
eralized profiling (GP) method. The true values of parameters areα1 = 3, andα2 = 10 .
κ = 0.732σe Parameters α1 α2
Senario Methods Robust GP Robust GP
No BIAS 0.09 0.07 0.32 0.28
Outliers SD 0.87 0.81 2.38 2.26
RMSE 0.87 0.81 2.39 2.26
10 BIAS 0.19 0.37 0.59 1.19
Outliers SD 0.98 1.60 2.71 4.51
RMSE 1.00 1.64 2.76 4.64
20 BIAS 0.15 0.25 0.48 0.82
Outliers SD 1.32 1.97 3.61 5.31
RMSE 1.32 1.97 3.63 5.35
30 BIAS 0.26 0.41 0.79 1.26
Outliers SD 1.53 3.17 4.32 8.44
RMSE 1.55 3.19 4.38 8.49

CHAPTER 3. SIMULATION AND APPLICATION 23
κ = 0.982σe Parameters α1 α2
Senario Methods Robust GP Robust GP
No BIAS 0.10 0.07 0.35 0.28
Outliers SD 0.84 0.81 2.32 2.26
RMSE 0.84 0.81 2.33 2.26
10 BIAS 0.19 0.37 0.62 1.19
Outliers SD 0.97 1.60 2.67 4.51
RMSE 0.98 1.64 2.73 4.64
20 BIAS 0.13 0.25 0.44 0.82
Outliers SD 1.27 1.97 3.47 5.31
RMSE 1.27 1.97 3.48 5.35
30 BIAS 0.28 0.41 0.85 1.26
Outliers SD 1.54 3.17 4.32 8.44
RMSE 1.55 3.19 4.38 8.49
κ = 1.345σe Parameters α1 α2
Senario Methods Robust GP Robust GP
No BIAS 0.10 0.07 0.35 0.28
Outliers SD 0.82 0.81 2.28 2.26
RMSE 0.83 0.81 2.30 2.26
10 BIAS 0.19 0.37 0.63 1.19
Outliers SD 0.97 1.60 2.68 4.51
RMSE 0.98 1.64 2.74 4.64
20 BIAS 0.13 0.25 0.42 0.82
Outliers SD 1.26 1.97 3.44 5.31
RMSE 1.26 1.97 3.45 5.35
30 BIAS 0.28 0.41 0.87 1.26
Outliers SD 1.60 3.17 4.53 8.44
RMSE 1.62 3.19 4.59 8.49

CHAPTER 3. SIMULATION AND APPLICATION 24
confidence intervals for the parameters as[
α j −1.96× SE(α j), α j +1.96× SE(α j)
], j = 1,2 (3.16)
The coverage probabilities of the 95% confidence intervals are also given in Table 3.2,
which are very close to 95%.
3.1.2 FitzHugh-Nagumo Equations
The FitzHugh-Nagumo equations are popular models for describing the behaviour of spike
potentials in the giant axon of squid neurons (FitzHugh 1961and Nagumo et al. 1962):
dV(t)dt
= c
(V(t)−V(t)3
3+R(t)
)
dR(t)dt
= −1c
(V(t)−a+bR(t)
)(3.17)
wherea,b,c are three parameters in the model. The computation detail issimilar to that in
the previous section except that we are now dealing with two components instead of one.
We use the following steps to generate outliers:
• (3.17) is solved numerically at 201 equally-spaced points in [0,20] with the initial values
V(0) =−1, R(0) = 1 and the true parameter values(a,b,c) = (0.2,0.2,3).
• Add normal noise with mean 0 and standard deviationσe= 1 to the equally-spaced points
of the ODE solution for each component.
• Randomly selectmobservations using the discrete uniform distribution in [1,201] as out-
lier candidates.
• For each selected observation, use a Bernoulli distribution with probability 0.5 to deter-
mine a sign, either positive or negative.
• For each selected observation, use a Pareto(υ = 3,ξ = 3) distribution to generate a value.
• For each selected observation, if its related sign is positive, we add the value generated
from the Pareto distribution to this observation; if its sign is negtive, we subtract the value
generated from the Pareto distribution from this observation.
• The parameters(a,b,c) are estimated from the same simulated data using the robust

CHAPTER 3. SIMULATION AND APPLICATION 25
Table 3.2: The means and standard deviations (SDs) for the standard error estimates us-
ing the sandwich method over 100 simulation replicates. “Sample" represents the sample
SDs of the parameter estimates. “CP" stands for the coverageprobabilities of the 95%
confidence intervals for the parameters.
κ = 0.732σe Parameter Sample Mean SD CP
10% α1 0.98 0.97 0.32 94%
Outliers α2 2.71 2.64 0.90 94%
20% α1 1.32 1.19 0.59 97%
Outliers α2 3.61 3.22 1.65 96%
30% α1 1.53 1.38 0.72 94%
Outliers α2 4.32 3.75 2.12 93%
κ = 0.982σe Parameter Sample Mean SD CP
10% α1 0.97 0.95 0.29 94%
Outliers α2 2.67 2.58 0.81 94%
20% α1 1.27 1.16 0.50 98%
Outliers α2 3.47 3.14 1.42 96%
30% α1 1.54 1.40 0.88 95%
Outliers α2 4.32 3.81 2.61 94%
κ = 1.345σe Parameter Sample Mean SD CP
10% α1 0.97 0.92 0.26 95%
Outliers α2 2.68 2.51 0.73 94%
20% α1 1.26 1.16 0.42 96%
Outliers α2 3.44 3.13 1.17 95%
30% α1 1.60 1.43 0.74 94%
Outliers α2 4.53 3.87 2.18 94%

CHAPTER 3. SIMULATION AND APPLICATION 26
0 5 10 15 20−8
−6
−4
−2
0
2
4
6
8
t
V
0 5 10 15 20−10
−5
0
5
10
15
20
t
R
Figure 3.3: The simulated data from the FitzHugh-Nagumo ODEs with 20 outliers added.
The solid line is the numerical solution to the FitzHugh-Nagumo ODEs, and the outliers
are marked with circles.
method and the generalized profiling method. Both methods represent the ODE variables,
V(t) andR(t), with cubic B-splines using 201 equally-spaced knots in [0,20].
We use four different numbers of outliersm= 0, 20, 40, 60, four different values of
λ = 104, 105,106,107 and three different values ofκ = 0.732σe,0.982σe,1.345σe for the
Huber function, which are corresponding to 85%,90% and 95% relative efficiency (Fox
2008). For each combination ofm,λ andκ, the above procedure is repeated 100 times.
Figure 3.3 shows one simulated data set.
Table 3.3 displays the biases, standard deviations (SDs), and root mean squared errors
(RMSEs) of the parameter estimates on 100 simulation replicates using the robust method
and the generalized profiling method whenλ = 104. The results for other values ofλ are
quite similar and thus omitted here. When there are no outliers, the robust method has
almost the same biases, SDs and RMSEs as the generalized profiling method for all three
parameters. When 20 outliers exist in the simulated data, the generalized profiling method
has around double SDs and RMSEs of ˆa andc when comparing with the scenario with no
outliers, while the robust method has only a slightly increase. The RMSEs of the estimates
for a, b andc using the robust method are around 58%, 69% and 52% of those using the

CHAPTER 3. SIMULATION AND APPLICATION 27
Table 3.3: The biases, standard deviations (SDs), and root mean squared errors (RM-
SEs) of parameter estimates on 100 simulation replicates using the robust method and
the generalized profiling (GP) method. The tuning parameterin the Huber function,
κ = 0.732σe, 0.982σe, 1.345σe , which correspond to 85%, 90%, 95% asymptotic effi-
ciency at the normal distribution.
κ = 0.732σe True MethodNo Outliers 20 Outliers
Bias SD RMSE Bias SD RMSE
a 0.2Robust -0.009 0.047 0.048 -0.011 0.050 0.051
GP -0.010 0.045 0.046 -0.009 0.090 0.090
b 0.2Robust 0.001 0.196 0.195 -0.008 0.205 0.204
GP 4e-4 0.175 0.175 -0.043 0.282 0.284
c 3Robust -0.003 0.155 0.154 -0.012 0.189 0.188
GP 0.017 0.197 0.197 0.065 0.407 0.410
True Method40 Outliers 60 Outliers
Bias SD RMSE Bias SD RMSE
a 0.2Robust -0.012 0.064 0.065 -0.013 0.072 0.073
GP -0.094 0.524 0.529 -0.119 0.669 0.676
b 0.2Robust -0.016 0.255 0.254 -0.023 0.276 0.275
GP -0.188 1.069 1.080 -0.159 1.324 1.327
c 3Robust -0.042 0.190 0.194 -0.041 0.205 0.208
GP 0.644 3.145 3.195 0.888 2.937 3.054

CHAPTER 3. SIMULATION AND APPLICATION 28
κ = 0.982σe True MethodNo Outliers 20 Outliers
Bias SD RMSE Bias SD RMSE
a 0.2Robust -0.008 0.046 0.046 -0.010 0.049 0.050
GP -0.010 0.045 0.046 -0.009 0.090 0.090
b 0.2Robust -1e-4 0.192 0.191 -0.009 0.202 0.202
GP 4e-4 0.175 0.175 -0.043 0.282 0.284
c 3Robust 0.006 0.168 0.168 -0.008 0.197 0.197
GP 0.017 0.197 0.197 0.065 0.407 0.410
True Method40 Outliers 60 Outliers
Bias SD RMSE Bias SD RMSE
a 0.2Robust -0.011 0.066 0.067 -0.016 0.077 0.078
GP -0.094 0.524 0.529 -0.119 0.669 0.676
b 0.2Robust -0.015 0.261 0.260 -0.033 0.271 0.271
GP -0.188 1.069 1.080 -0.159 1.324 1.327
c 3Robust -0.031 0.216 0.217 -0.015 0.222 0.221
GP 0.644 3.145 3.195 0.888 2.937 3.054

CHAPTER 3. SIMULATION AND APPLICATION 29
κ = 1.345σe True MethodNo Outliers 20 Outliers
Bias SD RMSE Bias SD RMSE
a 0.2Robust -0.009 0.045 0.046 -0.012 0.051 0.052
GP -0.010 0.045 0.046 -0.009 0.090 0.090
b 0.2Robust -4e-4 0.185 0.184 -0.010 0.198 0.197
GP 4e-4 0.175 0.175 -0.043 0.282 0.284
c 3Robust 0.015 0.187 0.186 0.003 0.213 0.212
GP 0.017 0.197 0.197 0.065 0.407 0.410
True Method40 Outliers 60 Outliers
Bias SD RMSE Bias SD RMSE
a 0.2Robust -0.012 0.069 0.069 -0.017 0.083 0.085
GP -0.094 0.524 0.529 -0.119 0.669 0.676
b 0.2Robust -0.019 0.271 0.271 -0.034 0.276 0.277
GP -0.188 1.069 1.080 -0.159 1.324 1.327
c 3Robust -0.012 0.265 0.264 0.005 0.263 0.262
GP 0.644 3.145 3.195 0.888 2.937 3.054

CHAPTER 3. SIMULATION AND APPLICATION 30
generalized profiling method whenκ = 1.345σe, respectively. When 40 or 60 outliers exist
in the simulated data, the RMSEs of the estimates fora, b andc using the robust method
are only around 13%, 25% and 8% of those using the generalizedprofiling method when
κ = 1.345σe.
The standard errors (SEs) for parameter estimates are estimated using the sandwich
method. Table 3.4 shows the mean and standard deviation (SD)of the standard error es-
timates over 100 simulation replicates. We also calculate the sample standard deviation
for the parameter estimates in the same 100 simulation replicates. The mean of the sand-
wich estimates is greater than the sample standard deviation. We also calculate the 95%
confidence intervals for the parameters. The coverage probabilities of the 95% confidence
intervals are also given in Table 3.4, which are close to 95% .
3.2 Application to Predator-Prey Model
The predator-prey ODE model (1.1) is estimated from real ecological data using the robust
method. The ODE parameters to estimate areθ = (ε,α,m,bC,bB,kC,kB)T . The biological
interpretations are given in the Introduction section. VariablesN, C, R, B in the predator-
prey ODE model are each represented with a cubic B-spline with 400 equally-spaced knots.
We only have the data for Chlorella (C) and Brachionus (B), and the other two variables, ni-
trogen (N) and reproducing Brachionus (R), are not measurable. Hence, the criterion (2.8)
is used to obtain the estimate of the spline coefficients. We have the measurements of the
two variables, soM = 2 in (2.8) . The predator-prey ODE model (1.1) has four variables, so
S= 4 in (2.8) . The weightsω j , j = 1,2,3,4 in (2.8) are chosen as the reciprocals of vari-
ances of the Predator-Prey ODE solutions using the parameter values given in Fussmann
et al. (2000), which are 0.0011,0.0011,0.16,0.094, respectively, such that the normalized
sums of squared errors are of roughly comparable sizes. The optimal smoothing parameter
is chosen asλℓ = 104, ℓ= 1,2,3,4 by minimizing the criterion (2.12). The cutoffκ j for the
Huber functionρ j in (2.8) is taken asκ j = 1.345σ j , whereσ j is a robust estimate of the
noise standard deviation.
The parameter estimates from the observed data are shown in Table 3.5. The robust
method gives a smaller assimilation efficiency (ε) and decay of fecundity (α) but a larger
half-saturation constants of Chlorella and Brachionus (kC andkB) when compared with the

CHAPTER 3. SIMULATION AND APPLICATION 31
Table 3.4: The means and standard deviations (SDs) for the standard error estimates us-
ing the sandwich method over 100 simulation replicates. “Sample" represents the sample
SDs of the parameter estimates. “CP" stands for the coverageprobabilities of the 95%
confidence intervals for the parameters.
κ = 0.732σe Parameter Sample Mean SD CP
a 0.05 0.13 0.66 98%
10% b 0.20 0.37 1.45 93%
Outliers c 0.19 0.42 1.77 96%
a 0.06 0.08 0.04 96%
20% b 0.26 0.26 0.10 93%
Outliers c 0.19 0.29 0.08 97%
a 0.07 0.09 0.04 98%
30% b 0.28 0.28 0.07 90%
Outliers c 0.20 0.32 0.08 99%
κ = 0.982σe Parameter Sample Mean SD CP
a 0.05 0.08 0.03 99%
10% b 0.20 0.23 0.06 93%
Outliers c 0.20 0.28 0.06 96%
a 0.07 0.09 0.08 99%
20% b 0.26 0.28 0.22 92%
Outliers c 0.22 0.35 0.28 99%
a 0.08 0.12 0.17 99%
30% b 0.27 0.35 0.44 89%
Outliers c 0.22 0.39 0.26 100%

CHAPTER 3. SIMULATION AND APPLICATION 32
κ = 1.345σe Parameter Sample Mean SD CP
a 0.05 0.09 0.05 99%
10% b 0.20 0.24 0.07 96%
Outliers c 0.21 0.32 0.09 97%
a 0.07 0.11 0.11 98%
20% b 0.27 0.33 0.65 94%
Outliers c 0.26 0.39 0.22 98%
a 0.08 0.11 0.07 98%
30% b 0.28 0.31 0.08 92%
Outliers c 0.26 0.44 0.24 100%
Table 3.5: Parameter estimates and the standard errors (SEs) for the Predator-Prey ODE
model (1.1) from the real ecological data. MSE is defined as the mean squared errors of the
ODE solutions to the data excluding outliers. As a comparison, we also give the parameter
values given in Fussmann et al. (2000) and the generalized profiling estimates.
Estimates ε α m bC bB kC kB MSE
Fussmann 0.25 0.40 0.055 3.3 2.25 4.3 15.0 1.762
Profiling 0.11 0.01 0.152 3.9 1.97 4.3 15.7 0.171
Robust 0.09 7.1e-5 0.072 3.5 1.74 6.6 17.5 0.122
SE 0.01 0.08 0.088 0.2 0.07 0.6 0.9 N.A.

CHAPTER 3. SIMULATION AND APPLICATION 33
generalized profiling method and the parameter values givenin Fussmann et al. (2000).
The robust estimation for the standard deviation isσC = 1.73 andσB = 2.10 . The stan-
dard errors for robust estimates are estimated using the sandwich method. We notice that
some parameter values are well defined by the data, as indicated by their small standard
errors, and others are poorly defined, such as parametersα andm. This suggests that more
observations are required in order to estimate these parameters accurately.
4 6 8 10 12 14 160
20
40
60
80
Chl
orel
la
4 6 8 10 12 14 160
2
4
6
8
10
12
Time
Bra
chio
nus
DataFussmann et al. (2000)Generalized ProfilingRobust Method
DataFussmann et al. (2000)Generalized ProfilingRobust MethodOutlier
Figure 3.4: Solutions to the predator-prey ODEs (1.1) usingthe parameter values as robust
estimates, generalized profiling estimates and those in Fussmann et al. (2000). Observed
experimental data are from Yoshida et al. (2003; Fig. 2), with dilution ratesδ = 0.68day−1.
The circle indicates the outlier identified by robust method. The unit ofChlorella and
Brachionusis µmolL−1, and the unit of time is day.
The predator-prey ODEs (1.1) are solved numerically using the parameter values equal

CHAPTER 3. SIMULATION AND APPLICATION 34
to robust estimates, generalized profiling estimates and those given in Fussmann et al.
(2000), respectively. The ODE solutions are shown in Figure3.4. The two peaks of the
ODE solution for Brachionus using the robust estimates are lower than those using the gen-
eralized profiling estimates, because the Huber function inthe robust method downweights
the effect of the outlier marked with a circle. We define the outliers as those observations
satisfying
y j(ti j )> sj(ti j |θ(λ))+1.96σ j or y j(ti j )< sj(ti j |θ(λ))−1.96σ j (3.18)
The mean squared errors (MSE) of the ODE solution to the observations excluding out-
liers are calculated to quantify the goodness-of-fit of the ODE models with the parameter
estimates. The MSE with robust estimates is reduced 93% fromthat with parameter values
given in Fussmann et al. (2000). The robust method also has 29% smaller MSE than the
generalized profiling method.

Chapter 4
Conclusion and Discussion
4.1 Conclusion
Ordinary Differential Equations are widely used in Biology, Economics, Finance and other
fields. However, the values of ODE parameters are rarely known. While it is of great in-
terest to estimate ODE models from noisy observations, there are some limitations with
current statistical approaches for estimating such models. For instance, the current estima-
tion methods do not take into account outliers in observations, and hence the estimators are
not robust.
We propose a robust method for estimating ODE models from noisy observations. A
nonparametric function is used to represent the dynamic process. The nonparametric func-
tion is estimated by the robust penalized spline smoothing method. Some robust measure-
ments for fitted residuals are defined, so the estimate for thenonparametric function is
robust to any outliers in the data. The parametric ODE modelsdefine the penalty term,
which controls the roughness of the nonparametric functionand maintains the fidelity of
the nonparametric function to the ODE models.
The spline coefficients and the ODE parameters are estimatedby two levels of opti-
mization. The spline coefficients are estimated in the inner-optimization, conditional on
the ODE parameters, hence the coefficient estimates can be treated as an implicit function
of the ODE parameters. The ODE parameters are then estimatedin the outer-optimization.
The sandwich method is applied to estimate the covariance matrix of the ODE parame-
ters. The functional relationships between the spline coefficients and the ODE parameters
35

CHAPTER 4. CONCLUSION AND DISCUSSION 36
are considered, which are used to derive the analytic gradients for optimization with the
implicit function theorem.
The simulation studies show that the robust method providessatisfactory estimates for
the ODE parameters when data have outliers. The robust method is applied to estimate a
predator-prey ODE model with a real ecological data set. TheODE model with the robust
estimates fits the data better than the generalized profilingestimates significantly, as shown
in Figure 3.4.
4.2 Discussion
A good byproduct of the robust method is that the initial values of the ODE variables can
be estimated after obtaining the estimates for the ODE parameters. The goodness-of-fit of
ODE models to noisy data can be assessed by solving ODEs numerically, and comparing
the fit of ODE solutions to data. Solving ODEs requires one to specify the initial values
for the ODE variables, which are defined as the values of the ODE variables at the first
time point. A tiny change to the initial values may result in ahuge difference of the ODE
solutions. Therefore, it is very important to use an accurate estimate for the initial values.
The first observations for the ODE variables at the first time point often have measurement
errors, and thus it is dangerous to use the first observationsas the initial values of the ODE
variables. Moreover, some ODE variables may not be measurable, and no first observations
are available.
The robust method uses a nonparametric function to represent the dynamic process,
hence the initial values of the ODE variables can be estimated by evaluating the nonpara-
metric function at the first time point:
xℓ(t0) = cTℓ φℓ(t0), ℓ= 1, . . . ,S (4.1)
Our experience indicates that the ODE solution with the estimated initial values tends to fit
the data better than using the first observations directly.

Chapter 5
Homogenization Tests of Climate Series
The first stage in climate change studies based on long climate records is almost inevitably
a homogeneity testing of climate data (Alexandersson and Moberg, 1997).Homogeneity
testingis designed to test if there is any jump or other trend (such aslinear trend) in the
climate series. The main source of non-homogeneities in climate data is relocation of
equipments. Standard Normal Homogeneity Test and Yao & Davis’ Test are two widely
used methods for non-homogeneity detection in climate timeseries. In this chapter we
present these two methods which will be used in the next two chapters.
5.1 Standard Normal Homogeneity Test
In this section,candidate seriesis the series from the climate station we are interested in
andreference seriesare the series from climate stations near the candidate station.
SupposeY denotes the candidate series (of temperature or precipitation, for example)
andXj , j = 1, . . . ,k denotes the reference series;Yi , i = 1, . . . ,n denotes a specific value ofY
at timei andXji , i = 1, . . . ,n denotes a specific value ofXj at timei. k andn are the number
of reference series and the sample size. To detect non-homogeneities, we use ratios for
precipitation data (Alexandersson and Moberg, 1997)
Qi =Yi/
{[ k
∑j=1
ρ2j XjiY/Xj
]/ k
∑j=1
ρ2j
}(5.1)
37

CHAPTER 5. HOMOGENIZATION TESTS OF CLIMATE SERIES 38
and use differences for temperature data
Qi =Yi −{ k
∑j=1
ρ2j [Xji − Xj +Y]/
k
∑j=1
ρ2j
}(5.2)
whereY denotes the sample mean ofY andXj denotes the sample mean ofXj ; ρ j denotes
the correlation coefficient between the candidate series and reference seriesXj .
Thestandard normal homogeneity test(SNHT) is applied to the standardized series of
Q to detect non-homogeneities:
Zi = (Qi − Q)/σQ (5.3)
whereσQ is the sample(n−1)-weighted standard deviation ofQ.
The null hypothesis is
H0 : Zi ∼ N(0,1), i ∈ {1, . . . ,n} (5.4)
HA :
Zi ∼ N(µ1,1), i ∈ {1, . . . ,a}Zi ∼ N(µ2,1), i ∈ {a+1, . . . ,n}
(5.5)
The test statistic is (Alexandersson and Moberg, 1997):
Tmax= max1≤a≤n−1
{Ta}= max1≤a≤n−1
{az21+(n−a)z2
2} (5.6)
wherez1 andz2 denote averages of theZ series before (including) and after timea. If Tmax
is greater than the critical value, we reject the null hypothesis. Khaliqa and Ouarda (2007)
give the critical values for normally distributed data. Simulations have been done in this
thesis to find out the critical values for some other types of data. The estimates of two levels
before and after the possible break are then (by 5.3)
q1 = σQz1+ Q (5.7)
q2 = σQz2+ Q (5.8)
The advantage of SNHT is that we can use the information of reference series to conduct
the test if the jump is unique to the candidate station. One disadvantage of SNHT is that if
the reference series also have jumps as the candidate serieshas, SNHT may not be possible
to detect the jumps.

CHAPTER 5. HOMOGENIZATION TESTS OF CLIMATE SERIES 39
5.2 Yao and Davis’ Test
Yao and Davis’test is another method for non-homogeneity detection. Given a seriesY,
H0 : Yi = µ+ei , i ∈ {1, . . . ,n} (5.9)
HA : ∃k∈ {1, . . . ,n−1},
Yi = µ+ei , i ∈ {1, . . . ,k}Yi = µ+δ+ei , i ∈ {k+1, . . . ,n},δ 6= 0
(5.10)
To detect the change point, we calculate (Yao and Davis, 1984)
T1 = max1≤k≤n−1
{∣∣∣∣1sk
√n
k(n−k)
k
∑i=1
(Yi −Yn)
∣∣∣∣}
(5.11)
where
s2k =
1n−2
[ k
∑i=1
(Yi −Y1:k)2+
n
∑i=k+1
(Yi −Y(k+1):n)2]. (5.12)
Y1:k denotes the average ofY1 to Yk andY(k+1):n denotes the average ofYk+1 to Yn. This
method only applies to independent and identically distributed (i.i.d.) data with the mean
of the error being 0. Put another way,ei need not to be normal.
We can find the approximate critical values using the limit distribution ofT1:
P(T1 >x+bn
an)≈ 1−exp{−2e−x} (5.13)
where
an =√
2loglogn,bn = 2loglogn+12
logloglogn− 12
logπ (5.14)
or by permutation method (which will be covered in Section 5.4).
Two advantages of Yao and Davis’ method over SNHT are (1) it requires no reference
series, and (2) it does not require normal distributed data.
5.3 Linear Trend
Although not pursued in this thesis, it is interesting to introduce the linear trend version
of SNHT. The null and the alternative hypotheses of the linear trend version of SNHT are
(Alexandersson and Moberg, 1997):
H0 : Zi ∈ N(0,1), i ∈ {1, . . . ,n} (5.15)

CHAPTER 5. HOMOGENIZATION TESTS OF CLIMATE SERIES 40
HA :
Zi ∈ N(µ1,1), i ∈ {1, . . . ,a}
Zi ∈ N
(µ1+(i −a)(µ2−µ1)/(b−a),1
), i ∈ {a+1, . . . ,b}
Zi ∈ N(µ2,1), i ∈ {b+1, . . . ,n}
(5.16)
The test statistic is based on the likelihood ratio (Lindgren 1968):
Tmax= max1≤a<b≤n
{−aµ2
1+2aµ1z1−µ21SB−µ2
2SA+2µ1SZB+2µ2SZA (5.17)
−2µ1µ2SAB− (n−b)µ22+2(n−b)µ2z2
}(5.18)
where
SA=b
∑i=a+1
(i −a)2/(b−a)2, SB=b
∑i=a+1
(b− i)2/(b−a)2 (5.19)
SZA=b
∑i=a+1
zi(i −a)/(b−a), SZB=b
∑i=a+1
zi(b− i)/(b−a) (5.20)
SAB=b
∑i=a+1
(b− i)(i −a)/(b−a)2 (5.21)
The estimates of the levels before and after the trend are
µ1 =az1+SZB−SL×SAB
a+SB+SK×SAB(5.22)
µ2 = µ1−SAB
SA+n−b+
(n−b)z2+SZASA+n−b
. (5.23)
Jaruskova and Rencova (2007) propose a method for detectinga linear trend is
H0 : Yi = a+ei , i ∈ {1, . . . ,n} (5.24)
HA : ∃k∈ {1, . . . ,n−1},
Yi = a+ei , i ∈ {1, . . . ,k}Yi = a+bi−k
n +ei , i ∈ {k+1, . . . ,n}(5.25)
where{ei} are i.i.d. random errors with mean 0 and varianceσ2, andE|ei |2+∆ < ∞.

CHAPTER 5. HOMOGENIZATION TESTS OF CLIMATE SERIES 41
The test statistic is:
T2 = max1≤k≤n−2
∣∣∣∣ 1σk
1√n ∑n
i=k+1(Yi −Yn)i−kn
∣∣∣∣√
(n−k)(n−k+1)(n−k+1/2)3n3 − (n−k)2(n−k+1)2
4n4
(5.26)
whereσk is the estimate ofσ.
We can find the approximate critical values using the limit distribution ofT2:
P(T2 >x+bn
an)≈ 1−exp{−2e−x} (5.27)
where
an =√
2loglogn,bn = 2loglogn+
√3
4π(5.28)
or by permutation method.
5.4 Permutation Method
Permutation methodis a method for obtaining the critical values for different models. For
instance, if we want to compute the 95% critical value for an i.i.d. normal sequence under
(5.11), firstly we generaten independent observations from a normal distribution to create a
seriesY. Then we randomly permuteY mtimes and for every permutation the value ofT1 is
calculated. Thus we can obtain the 95% critical value from thesemvalues ofT1 (Jaruskova
and Rencova, 2007). Note that permutation method only applies to i.i.d. sequence since it
will damage the time structure if the sequence is correlated, such as autoregressive models.
Put another way, a permutation of autoregressive series is no longer autoregressive, but a
permutation of i.i.d. series is still i.i.d.

Chapter 6
Robustness of Homogenization Tests
We are dealing with another version of robustness. In this section and the following,ro-
bustnessmeans having the ability to detect homogeneities in the climate series even if the
data is not normal. The Matlab code for this chapter is attached as Appendix B.
Simulations have been done using the three models in Section6.1-6.3 as well as i.i.d.
standard normal model for both SNHT and Yao & Davis’ methods.We add a jump at
the middle of each simulated series, that is, att = 500. The values of the jump are
0,0.1,0.2, . . .,3.0. We use 1000 series for each combination of jump values, methods and
models. For each series, the number of time points is 1000. Accordingly, there are three
types of power curves:
Type I Power: the probability of detecting the jump and the jump time. By detecting
the jump we meanTmax is greater than the critical value and by detecting the jump time
we meanTmax is obtained att = 499 or 500 or 501. The latter criterion seems strict but
reasonable given that usually we use monthly data instead ofdaily.
Type II Power: the probability of detecting the jump but not detecting thejump time.
Overall Power: the probability of detecting the jump, which is equal to Type I + Type
II. When the jump is equal to 0, this probability is actually type I error. We use the critical
values in Table 6.1 to make sure that the type I error is approximately 0.05 for every model
and method.
The critical value of the difference version of SNHT for i.i.d. normal model is due
to Khaliqa and Ouarda (2007), who have done simulations based on normally generated
data. The other three critical values of the difference version as well as all critical values
42
CHAPTER 6. ROBUSTNESS OF HOMOGENIZATION TESTS 43
Table 6.1: 95% critical values for different methods and models. SNHT diff. means the
difference version of SNTH (5.2) and SNHT ratio means the ratio version of SNHT (5.1).
Yao & Davis’ means Yao & Davis’ method.
Normal t(3) AR(2) LTM(0.25)
SNHT diff. 10.692 13.4705 18.8575 76.9026
SNHT ratio 22.7871 38.5710 24.8148 53.7888
Yao & Davis’ 3.2898 3.6616 4.3880 9.0053
of the ratio version are based on the empirical distributionof Tmax which involves 10000
runs each. Yao & Davis’ critical values for i.i.d. normal andt(3) are based on the permuta-
tion principle (10000 permutations) and those for AR(2) andLTM(0.25) are based on the
empirical distribution ofT1 with 10000 series each.
When dealing with the ratio version of SNHT, we take exponential of the simulated data
from all models because the ratio version is for precipitation which is always positive. For
example, firstly we generateYi from N(0,1) and then useeYi in the simulation; put another
way, we use log-normal data for the ratio version. We use five reference series for SNHT.
The results are shown in Figure 6.1-6.3. Apparently the i.i.d. normal model works best
because SNTH is designed for normal data. Surprisingly, theAR(2) model is the second
best and its performance is quite close to that of i.i.d normal model, even if it is not a model
with independent data. It is interesting to notice that t(3)model totally loses its power in
the ratio version of SNHT. The performance of long-term memory model is not as good as
the i.i.d. normal and AR(2) models, but it is more robust thanthat of the t(3) model. Also
notice that Type II power is increasing at first and then decreasing. One explanation is that
the jump time is getting easier to detect when the jump is getting bigger. Next we introduce
in detail the three models.
6.1 Thick-tailed Distributions
t distributions are representative of thick-tailed distributions. In the simulation study, we
generate i.i.d. data from at distribution with degree of freedom 3. In Figure 6.1, the

CHAPTER 6. ROBUSTNESS OF HOMOGENIZATION TESTS 44
0 0.5 1 1.5 2 2.5 30
0.5
1
Typ
e I P
ower
0 0.5 1 1.5 2 2.5 30
0.5
1
Typ
e II
Pow
er
0 0.5 1 1.5 2 2.5 30
0.5
1
Typ
e I+
Typ
e II
i.i.d. Normali.i.d. t(3)AR(2)LTM(0.25)
Figure 6.1: Power curves of the difference version of SNHT

CHAPTER 6. ROBUSTNESS OF HOMOGENIZATION TESTS 45
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
Typ
e I P
ower
0 0.5 1 1.5 2 2.5 30
0.5
1
Typ
e II
Pow
er
0 0.5 1 1.5 2 2.5 30
0.5
1
Typ
e I+
Typ
e II
i.i.d. Normali.i.d. t(3)AR(2)LTM(0.25)
Figure 6.2: Power curves of the ratio version of SNHT

CHAPTER 6. ROBUSTNESS OF HOMOGENIZATION TESTS 46
0 0.5 1 1.5 2 2.5 30
0.5
1
Typ
e I P
ower
0 0.5 1 1.5 2 2.5 30
0.5
1
Typ
e II
Pow
er
0 0.5 1 1.5 2 2.5 30
0.5
1
Typ
e I+
Typ
e II
i.i.d. Normali.i.d. t(3)AR(2)LTM(0.25)
Figure 6.3: Power curves of Yao & Davis’ method

CHAPTER 6. ROBUSTNESS OF HOMOGENIZATION TESTS 47
0 200 400 600 800 1000−10
0
10
20
30
t(3) sequence with a jump=10
0 200 400 600 800 10000
0.5
1
1.5
2x 10
11
exp(t(3))
Figure 6.4: The first panel shows an i.i.d.t(3) sequence with a jump=10 att = 500 and the
second panel shows the exponential of the sequence.

CHAPTER 6. ROBUSTNESS OF HOMOGENIZATION TESTS 48
performance oft(3) is better than Long-term memory model but worse thanAR(2). Figure
6.3 shows a similar result as that of Figure 6.1. However, In Figure 6.2, it does not work
at all. There is no power fort(3) no matter how large the jump is. The explanation for
this phenomena is that whilet(3) is thick-tailed in terms of its PDF the exponential oft(3)
is even more thick-tailed (you can imagine that the PDF is getting close to a ’uniform’
distribution). Even if we take exponential before we add thejump, it will not be detected
unless the jump is extremely large. Figure 6.4 shows this idea. So we do not recommend
to use the ratio version of SNHT fort-distributed, or more generally, thick-tailed data.
6.2 Autoregressive Memory
The second model is AR(2):
xt = 0.2xt−1+0.1xt−2+ωt , t ≥ 3 (6.1)
x1 = 0,x2 = 0,ωt ∼ i.i.d.N(0,1) (6.2)
Its performance is slightly worse than i.i.d. normal model but much better than the other
two among all three methods.
6.3 Long-term Memory
The long-term memory model (LTM) is of the form (Shumway and Stoffer 2006)
(1−B)dxt =∞
∑j=0
π jBjxt = ωt , 0< d < 0.5 (6.3)
whereB is the backshift operator (e.g.Bxt = xt−1, B2xt = xt−2), xt is the time series,ωt is
the white noise with varianceσ2, Γ is the gamma function and
π j =Γ( j −d)
Γ( j +1)Γ(−d)(6.4)
By algebraic calculation (Shumway and Stoffer 2006),
xt =∞
∑j=0
ψ jωt− j ,ψ j =Γ( j +d)
Γ( j +1)Γ(d)(6.5)

CHAPTER 6. ROBUSTNESS OF HOMOGENIZATION TESTS 49
0 100 200 300 400 500 600 700 800 900 1000−4
−2
0
2
4
Long−term memory series
0 100 200 300 400 500 600 700 800 900 1000−0.1
0
0.1
0.2
0.3
Autocorrelation function
Figure 6.5: One simulated long-term memory series and its autocorrelation function with
d = 0.25.

CHAPTER 6. ROBUSTNESS OF HOMOGENIZATION TESTS 50
Figure 6.5 shows one simulated long-term memory series and its autocorrelation func-
tion. In the simulation study,d = 0.25. Its performance is not so good as those of i.i.d.
normal and AR(2) models but it does reasonably well, especially when the jump is large
enough. This model is of great importance in climate study because most climate data are
long-term memory.

Chapter 7
Application to Barkerville, BC
7.1 Background of the Data
We have daily temperature and precipitation data of Barkerville, BC from Feb, 1888 to
Jan, 2007. In this thesis we use monthly mean temperature andmonthly total precipitation.
There are 1430 months but some observations are missing. We also have four incomplete
reference series from Dome Creek, Horsefly Lake Gruhs Lake, Mcbride 4SE and Quesnel
which are all less than 100 kilometers away from Barkerville. The monthly data are shown
in Figure 7.1 and 7.2. We apply SNHT and Yao & Davis’ method to the climate data. Note
that there is a sudden increase in the middle of the monthly total precipitation series of
Barkerville. That is because the number of rainy days are more than those of other periods.
Because the series are incomplete, we use the data from Dome Creek to fill up the gap
in the Barkerville data, and combine the data from Horsefly Lake Gruhs Lake, Mcbride
4SE and Quesnel to create a new reference series. However, there still exist some missing
values. There are 71 and 216 missing values in the new Barkerville and new reference
series for temperature and 60 and 196 for precipitation, respectively.
Next step is to find out if using different replacement valuesfor the missing data will
give significantly different results. We create 10000 random permutations of the raw data
(the missing values are not included) and replace the missing data with the firstn values of
each permutation, wheren is the number of missing values for each sequence. Thus there
are 10000 values of jump time andTmax for each test. Figure 7.3-7.5 show the result. It
seems that the replacement values do have significant effecton both the jump time and the
51

CHAPTER 7. APPLICATION TO BARKERVILLE, BC 52
200 400 600 800 1000 1200 1400−20−10
010
BA
RK
ER
VIL
LE
200 400 600 800 1000 1200 1400
−20−10
010
DO
ME
200 400 600 800 1000 1200 1400
−100
10
HO
RS
EF
LY
200 400 600 800 1000 1200 1400
−20−10
010
MC
BR
IDE
200 400 600 800 1000 1200 1400
−20
0
20
QU
ES
NE
L
Monthly Mean Temperature
Figure 7.1: Temperature series of Barkerville

CHAPTER 7. APPLICATION TO BARKERVILLE, BC 53
200 400 600 800 1000 1200 14000
200
400
BA
RK
ER
VIL
LE
200 400 600 800 1000 1200 1400
50100150200
DO
ME
200 400 600 800 1000 1200 1400
100
200
HO
RS
EF
LY
200 400 600 800 1000 1200 1400
50100150200
MC
BR
IDE
200 400 600 800 1000 1200 1400
50
100
150
QU
ES
NE
L
Monthly Total Precipitation
Figure 7.2: Precipitation series of Barkerville

CHAPTER 7. APPLICATION TO BARKERVILLE, BC 54
0 200 400 600 800 1000 1200 14000
500
1000
1500
jum
p tim
e
0 10 20 30 40 50 60 700
5
10
15
20
Tm
ax
Figure 7.3: Histograms of detected jumps and jump times using different replacement val-
ues with SNHT for temperature

CHAPTER 7. APPLICATION TO BARKERVILLE, BC 55
200 400 600 800 1000 1200 14000
2000
4000
6000
8000
jum
p tim
e
1 1.5 2 2.50
10
20
30
40
50
Tm
ax
Figure 7.4: Histograms of detected jumps and jump times using different replacement val-
ues with Yao & Davis’ method for temperature

CHAPTER 7. APPLICATION TO BARKERVILLE, BC 56
200 400 600 800 1000 1200 14000
2000
4000
6000
jum
p tim
e
0 200 400 600 800 1000 1200 14000
200
400
600
Tm
ax
Figure 7.5: Histograms of detected jumps and jump times using different replacement val-
ues with SNHT for precipitation

CHAPTER 7. APPLICATION TO BARKERVILLE, BC 57
0 200 400 600 800 1000 1200 1400−0.1
−0.05
0
0.05
0.1
Lag
Tem
pera
ture
0 200 400 600 800 1000 1200 1400−0.1
−0.05
0
0.05
0.1
Lag
Pre
cipi
tatio
n
Figure 7.6: ACF of the modified Barkerville series
maximum value ofT, which means we must take this into account when interpreting the
final result. Note that there is no Yao & Davis’ method for precipitation since this method
requires i.i.d. data with the mean of the error being 0.
In the final analysis, we use seasonal average to replace the missing data. That is, we
use the average of all January observations to replace the missing January values, and use
the average of all February observations to replace the missing February values, etc.
To figure out which model (or more specifically, which critical value) we should use, we
subtract the corresponding seasonal average from every observation to remove the seasonal
trend for temperature (we cannot do this to precipitation because it is always positive).
The sample autocorrelation functions of the adjusted data are in Figure 7.6 (Generated in
R), which seems from a long-term memory model. Table 7.1 shows the estimates of the
parameterd in the long-term memory model. The 95% confidence intervals of d for both
temperature and precipitation do not include 0, which meansthe critical values for long-
term memory model apply (based on 10000 series and not shown in Table 6.1). The values

CHAPTER 7. APPLICATION TO BARKERVILLE, BC 58
Table 7.1: Estimate of the LTM parameterd and its 95% CI
MLE Lower bound Upper bound
Temperature 0.127 0.067 0.188
Precipitation 0.066 0.010 0.124
in the table are computed by a package in R provided by Dr. Peter Guttorp.
7.2 Conclusion
The results are shown in Figure 7.7 and 7.8. There is no significant jump in the temperature
data but three possible jumps in the precipitation data.
We have scanned copies of the inspection binder after 1953 obtained from Monitoring
Operations Center in Richmond, BC. However, the inspectionbinder before 1953 was lost
in a fire. In the inspection binder of May 1975, it writes:
’The initial installation was in the road for snow removal, sothe observer moved it 200’
to the north. This didn’t affect the instrument exposure.’
As a result, there is a relocation of equipment in May, 1975 (corresponding to t = 1049)
which may still be the reason for the last jump of precipitation if we take the replacement
values into account (Figure 7.7).

CHAPTER 7. APPLICATION TO BARKERVILLE, BC 59
200 400 600 800 1000 1200 1400
10
20
30
T s
erie
s of
tem
pera
ture
One of the max is obtained at t = 1052
200 400 600 800 1000 1200 1400
10
20
30
40
T s
erie
s of
pre
cipi
tatio
n
Max is obtained at t = 507, t = 726 and t = 996; That is, 3rd 1930, 6th 1948 and 12th 1970
Figure 7.7: The result of SNHT: dash lines denote the 95% critical values. Replace missing
values with seasonal average. Use 95% critical value of LTM(0.127) for temperature and
95% critical value of LTM(0.066) for precipitation. There is a relocation in May, 1975(t =
1049) which may cause the last jump of the precipitation.
200 400 600 800 1000 1200 1400
0.5
1
1.5
2
T1
serie
s of
tem
pera
ture
Max is obtained at t = 226 and t = 1048
Figure 7.8: Yao & Davis’ method: the 95% critical value of LTM(0.127) is far above the
dots (about 5.7).

Chapter 8
Discussion
8.1 Lowess
It is also interesting to apply some smooth techniques to thesimulated data. Figure 8.1
shows an example of locally weighted scatter plot smoothing(Lowess) with standard i.i.d.
normal data. We tried five different jump values and it seems that the smoothed curves try
to hide the jumps.
8.2 Multiple Jumps
In the simulation study we only deal with one jump. We can alsotry multiple jumps as well.
For simplicity, we only tried two jumps. The number of observations in each series is 1000
and we add two same jump values att = 333 andt = 667, where jump = 0.1,0.2,. . . ,3.0.
Figure 8.2 shows the plots of the distance between the estimated and the true jump times.
The estimates tend to come towards the middle of the series. One explanation of this
phenomena is that the performance at the boundary is unstable.
60

CHAPTER 8. DISCUSSION 61
0 200 400 600 800 1000
−2
0
2
jump = 0.1
0 200 400 600 800 1000−2
0
2
jump = 0.5
0 200 400 600 800 1000
−2024
jump = 1
0 200 400 600 800 1000−2
024
jump = 2
0 200 400 600 800 1000−2
0246
jump = 3
Figure 8.1: Lowess. The span = 10% of the sample size.

CHAPTER 8. DISCUSSION 62
−500 0 500−500
0
500
−500 0 500−500
0
500
−500 0 500−500
0
500
−500 0 500−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−200
0
200
−200 0 200−50
0
50
−100 0 100−200
0
200
−200 0 200−200
0
200
−200 0 200−50
0
50
−200 0 200−200
0
200
−100 0 100−100
0
100
−100 0 100−100
0
100
−50 0 50−50
0
50
−20 0 20−100
0
100
−50 0 50−50
0
50
Figure 8.2: Scatterplot of the differences between the estimated and the true jump times
(which can be positive or negtive). X-axis is for the first jump and Y-axis for the second
jump. The first five graphs at the first row are for jump = 0.1, 0.2, 0.3, 0.4, 0.5, etc. Each
graph involves 1000 points.

Chapter 9
Literature Review of DOL Problem
9.1 Load-Duration Effects in Western Hemlock Lumber
This review is based onLoad-Duration Effects in Western Hemlock Lumberby Foschi and
Barrett (1982).
The duration-of-load adjustment is important to the strength of wood to obtain design
stress. An experiment on load-duration effects in bending for western hemlock lumber had
been underway since 1977 at Forintek Canada Corporation’s Western Lab. The material
tested was western hemlock lumber.
A control group (N=150) was tested to failure with a ramp loading of short duration
to establish the basic short-term strength distribution. Two stress levels were chosen for
long-term tests corresponding to the 20th-percentile and the 5th-percentile of the short-
term strength distribution. Five groups of N=100 specimenseach were assigned to the two
long-term tests. The times to failure were ranked and the corresponding CDF computed in
the paper.
The experiment only involved two constant levels. In reality, however, most loads
produce stress of a random, cyclic nature superimposed on a constant stress produced by
permanent loads. Thus it is important to be able to extrapolate constant load test results to
predict the behavior for practical load situations.
The Damage Accumulation Model is proposed:
dαdt
= aeω1RN
(τ(t)− τo
τs
)b
+λeω2VNα (9.1)
63

CHAPTER 9. LITERATURE REVIEW OF DOL PROBLEM 64
where
• α(t) is a measure of damage which is defined such thatα = 0 corresponds to undamaged
material andα = 1 corresponds to failure.
• a,b,λ,ω1 andω2 are parameters.
• RN andVN are standard random normal variables.
• τ(t) is the stress applied to the member.
• τo is a threshold that must be exceeded for damage to accumulate.
• τs is the stress at which the specimen will break in a short-termtest.
• σ = τ(t)/τs is called the applied stress ratio.
• σo = τo/τs is called the threshold stress ratio. It is assumed that stress thresholdτo varies
between members in direct proportion to the short term stress τs, so the threshold stress
ratio σo is a constant. Usuallyσo < σ < 1.
Two tests are considered:
Short-Term Test
This is a ramp-load test of short duration where the load increases linearly with time at
a rateks to failure in timeTs and the strengthτs is reached:
τ(t) = kst, τs= τ(Ts) = ksTs, α(Ts) = 1 (9.2)
There is no closed form of the solution to (9.1) with the abovesettings. We can resort
to numerical solutions using Matlab, for instance.
Constant Load Test
The load is increased linearly with time at the rateks until the stress levelτc is reached
in a timeTL. This level is then held constant until failure occurs at timeTc.
τc = τ(TL) = ksTL (9.3)
In this case, (9.1) must be integrated in two steps: damage accumulation during the loading
phase and during the constant phase. Again, we can resort to numerical solutions.
We use different combinations of parameter values to conduct simulation and obtain
the predicted CDFs for time to failure for each of the two tests and minimize the deviation:
ψ =
{ N
∑i=1
[log(T)∗i − log(T)i
]2}1/2
(9.4)

CHAPTER 9. LITERATURE REVIEW OF DOL PROBLEM 65
whereN is the total number of tests (including short-term and constant load tests) and
log(T)i is the simulated value corresponding to the same probability level as the test result
log(T)∗i in the experiment.
The Damage Accumulation Model has been verified and showed anagreement with
the experimental results. It brings together the strength of wood members and the loads to
which they are subjected, allowing an assessment of the reliability of wood structures in a
systematic manner.
However, the experiment only covered one species in bending. It is important to explore
the effect of these constraints, considering other speciesand sizes in further research.
9.2 Probabilistic Modeling of Duration of Load Effects in
Timber Structures
This review is based onProbabilistic Modeling of Duration of Load Effects in Timber
Structuresby Kohler and Svensson (2002).
Initial load-carrying capacity of structural timber is determined by loading an undam-
aged structural timber with a ramp load with constant loading rate until failure. This ca-
pacity is frequently referred to as the short-term capacityor short-term strength.
Two models we are interested in are (there is a third model butwith limited knowledge
of wood engineering, I will skip it):
Gerhards’ model:dαdt
= e−a+bS(t)
R0 (9.5)
where
• α(t) is the degree of damage such thatα = 0 corresponds to undamaged material and
α = 1 corresponds to failure.
• R0 is the short-term capacity.
• S(t) is the load.
• a,b are parameters.
Gerhards’ model can be solved under constant or ramp load stress situation.

CHAPTER 9. LITERATURE REVIEW OF DOL PROBLEM 66
Foschi and Yao’s Model:
dαdt
= A
(S(t)R0
−η)B
+C
(S(t)R0
−η)D
α(t), S(t)> ηR0 (9.6)
where
• α(t) is the degree of damage such thatα = 0 corresponds to undamaged material and
α = 1 corresponds to failure
• R0 is the initial capacity
• S(t) is the load
• A,B,C,D are parameters
• η is the threshold ratio, which is between 0 and 1, the latter bound referring to material
not affected by DOL.
This model can be solved under constant or ramp load stress situation.
The parameter assessment may be performed by introducing anerror termε:
t f = t f ,m(SR,θ)+ ε (9.7)
where
• t f ,m(SR,θ) is the general form of the time to failure of the above three models as a function
of the ratio between applied load to short-term strengthSR (0 < SR < 1) and a vector of
model parametersθ.
• ε is assumed to be normal with mean 0 and unknown standard deviation σε.
Maximum Likelihood method is used to estimate the mean values and covariance ma-
trix for θ andσε. The parameters of the models are calibrated on results fromlong-term
tests (Hoffmeyer, 1990).
The damage accumulation for the case of constant load for thedamage models is sig-
nificantly different. Gerhard’s model shows linearity of damage accumulation with time
while the others show highly non-linear behavior.
9.3 Duration of Load Effects And Reliability Based De-
sign
This review is based onDuration of Load Effects and Reliability Based Designby Foschi
and Yao (1986).

CHAPTER 9. LITERATURE REVIEW OF DOL PROBLEM 67
The introduction of reliability-based design in wood structures requires consideration
of the effects that load duration has on degradation of strength over time. The reliability
estimation is complicated by the fact that load history mustbe taken into account, not only
load magnitudes. Central to the solution of this problem is the availability of a DOL model
which allows the estimation of the degradation effect for any load sequence.
This paper considers the superposition of dead and live loads (such as snow). The in-
formation normally available for snow loads is the distribution of annual maximum, which
can be represented by an Extreme Type I distribution (a.k.a.Gumbel):
S=U +[−ln(−ln p)]/C (9.8)
or
Fmax(S) = exp
(−exp(−C(S−U))
)(9.9)
where
• p is a random number uniformly distributed between 0 and 1.
• U andC are distribution parameters.
• Fmax(S) is the CDF ofS.
Note: The valuep0 corresponding toS= 0 in (9.8) is the probability of no snow.
A snow design loadSn is chosen for a 30-year period withp= 29/30. The ratio ofS/Sn
of annual maximum to design load is also Gumbel-distributedaccording to
S/Sn =U∗+[−ln(−ln p)]/C∗ (9.10)
where
U∗ =CU
CU+3.3843,C∗ =CU+3.3843 (9.11)
In general, the duration of the maximum annual load is not known, but the duration of the
winter may be assumed to be 5 months (Nov.1 - Apr.1). Assume the annual load comes
in NS segments of equal duration and that within each segmentthe load remains constant.
The segment loads are assumed to be independent of each otherand equally distributed.
For consistency, this distribution must be such that the distribution for the maximum of the
NS segment loads equals that for the annual maximum load.

CHAPTER 9. LITERATURE REVIEW OF DOL PROBLEM 68
If F(S) is the segment load distribution andpe is the probability of snow in a segment,
Fmax(S) = [(1− pe)+ peF(S)]NS (9.12)
wherepe must satisfy
(1− pe)NS= p0 (9.13)
Introducing (9.9) into (9.12), the distribution ofS is
S=U +(−ln(−NS ln[(1− pe)+ pe p]))/C (9.14)
and the distribution of the ratiox of the segment loadS to the designSn becomes
S/Sn = x=CU+(−ln(−NS ln[(1− pe)+ pe p]))
CU+3.3843(9.15)
The dead loadD may be assumed normally distributed with CV =CD (CV = coefficient
of variation, which is defined as standard deviation over mean). If the design dead loadDn
is taken equal to the mean value, the ratiod of the dead load to the design dead load is
D/Dn = d = 1+CDpn (9.16)
wherepn is a standard normal variable.
A load sequence for NY years, with NS load segments per winterwill contain (NY×NS+1) independent random variables:NY×NSlive loads and a dead load.
The load at any segment will be
D+S= Sn(dγ+x) (9.17)
where
γ = Dn/Sn, d = D/Dn ∼ Normal, x= S/Sn ∼ Gumbel (9.18)
The design equation used in the Canadian code CAN3-086.1-84has the following form:
1.25Dn+1.50Sn = φR(0.05) (9.19)
where
• φ is the performance factor applied to the characteristic strengthR(0.05). R(0.05) is the
5th-percentile of the short-term strength distribution.

CHAPTER 9. LITERATURE REVIEW OF DOL PROBLEM 69
Rewrite (9.19):
Sn = φR(0.05)/(1.25γ+1.50) (9.20)
when introduced in (9.17),
D+S=φR(0.05)
1.25γ+1.50(dγ+x) (9.21)
Note:x= 0 during summer.
The main objective is to derive (9.21) so that we can generatedata from it and use the
data to test different models, such as Foschi and Yao’s model(9.6) in the previous review.

Chapter 10
Markov Chain Monte Carlo
Markov Chain Monte Carlo (MCMC) is a general method based on drawing values of pa-
rameterθ from approximate distributions and then correcting those draws to better approx-
imate the target posterior distribution,p(θ|y), wherey is the data obtained. The samples
are drawn sequentially, with the distribution of the sampled draws depending on the last
value drawn.
The key to MCMC is to create a Markov process whose stationarydistribution is the
specifiedp(θ|y) and run the simulation long enough so that the distribution of the current
draws is close enough to this stationary distribution (Gelman et al. 2003).
The Metropolis-Hastings algorithm is a general term for a family of MCMC methods
that are useful for drawing samples from posterior distributions. Metropolis-Hastings al-
gorithm is a generalization to the Metropolis algorithm.
The Metropolis-Hastings algorithm is an adaptation of a random walk that uses an
acceptance/rejection rule to converge to the specified target distribution. It proceeds as
follows (Gelman et al. 2003):
• Draw a starting pointθ0, for which p(θ0|y)> 0, from a starting distributionp0(θ).• For t=1,2,. . . , sample a proposalθ∗ from a proposal distribution at timet: Jt(θ∗|θt−1),
which can depend on the iteration numbert. The Metropolis algorithm requires the pro-
posal distribution to be symmetric, satisfying for anyθa,θb andt:
Jt(θa|θb) = Jt(θb|θa)
while the Metropolis-Hastings algorithm does not have suchrequirement.
70

CHAPTER 10. MARKOV CHAIN MONTE CARLO 71
• For Metropolis-Hastings algorithm, calculate the ratio ofthe densities, which is cor-
rected for the asymmetric proposal rule,
r =p(θ∗|y)/Jt(θ∗|θt−1)
p(θt−1|y)/Jt(θt−1|θ∗)
For the Metropolis algorithm, since the proposal distribution is symmetric,
r =p(θ∗|y)
p(θt−1|y)
• Set
θt =
θ∗ with probability min(r,1)
θt−1 otherwise
It can be proved that the sequence of iterationsθ1,θ2, . . . converges to the target distri-
bution. MCMC also applies to multiple-parameter cases.
The Metropolis-Hastings algorithm can be viewed as a stochastic version of a stepwise
mode-finding algorithm, always accepting steps that increase the density but only some-
times accepting downward steps because for example, ifp(θ∗|y)> p(θt−1|y) in Metropolis
algorithm, thenr > 1, which meansθt = θ∗ for sure (Gelman et al. 2003).

Chapter 11
Simulation
11.1 Models
It is of great importance in the determination of safe and efficient engineering design prop-
erties for all wood products. Three models are widely used inthe duration of load problem.
They are Madison curve, Exponential Damage Rate model (EDRM) and Barrett and Foschi
I model (B/F I) (Cai et al. 2000).
The Madison Curve is:
dαdt
= A(τ− τ0)B, A> 0,B> 0 (11.1)
where
• α(t) is a measure of damage which is defined such thatα = 0 corresponds to undamaged
material andα = 1 corresponds to failure.
• A,B are parameters.
• τ = τ(t) is the stress applied to the lumber.
• τ0 is a constant that must be exceeded for damage to accumulate for the lumber.
We only consider a ramp load test where the applied stress is increased linearly over
time until the lumber breaks
τ(t) = kt (11.2)
Thus, the break time of the Madison curve under linear stressis:
T =1k
{[k(B+1)
A
] 1B+1
+ τ0
}(11.3)
72

CHAPTER 11. SIMULATION 73
The Exponential Damage Rate model (EDRM) is:
dαdt
= exp(−A+Bτ), A> 0,B> 0 (11.4)
where
• α(t) is the measure of damage.
• A,B are parameters.
• τ = τ(t) is the stress applied to the lumber.
The break time of EDRM under ramp load test is:
T =1
Bklog(1+BkeA) (11.5)
The Barrett and Foschi I model (BFI) is:
dαdt
= A(τ− τ0)BαC, A> 0,B> 0,0<C< 1 (11.6)
The break time of B/F I model under ramp load test is:
T =1k
{[k(B+1)A(1−C)
] 1B+1
+ τ0
}(11.7)
However,A andC in the B/F I model are not identifiable. If we setA(1−C) to be a single
parameter, then this model is equivalent to the Madison curve. Hence, we focus on the first
two models.
11.2 MCMC
Specifically, we deal with
log(Ti j ) = log
(1k j
{[k j(Bi j +1)
Ai j
] 1Bi j +1
+ τ0
})+ei j (11.8)
and
log(Ti j ) = log
(1
Bi j k jlog(1+Bi j k je
Ai j )
)+ei j (11.9)
wherei = 1, . . . , I , j = 1, . . . ,J. We letei j ∼N(0,10−6) because in practice the break time is
recorded by a computer so the measurement error can be ignored and we are not interested
in it.

CHAPTER 11. SIMULATION 74
We apply the hierarchical model:
log(Ai j )∼ N(µA,σ2A), log(Bi j )∼ N(µB,σ2
B) (11.10)
We tale log ofA,B and the break time because they are all positive. We set the prior
distributions of the hyper-parameters as below:
µA ∼ N(0,106),µB ∼ N(0,106) (11.11)
σA ∼Uni f (0,100),σB ∼Uni f (0,100) (11.12)
Our simulation works as follows. Firstly, we use the following settings to generate two
data sets from Madison model:
log(A) = 1.0, log(B) =−1.0 (11.13)
whereA andB are the two parameters in Madison model. Note thatτ0 is always set to 0.2
in the Madison model. The two data sets are corresponding to two scenarios:
Scenario I: we usek= [0.1,0.3, . . .,0.9] (thusJ = 5) and generateI = 20 observations
Ti j for eachk. Then we use this data set for both models.
Scenario II: we usek= [0.1,0.2, . . .,1.0] (thusJ= 10) and generateI = 10 observations
Ti j for eachk. Then we use this data set for both models.
Note that the number of observations is always 100. Secondly, we use the following
settings to generate two data sets from EDRM:
log(A) = 1.0, log(B) =−1.0 (11.14)
whereA andB are now the two parameters in EDRM. The two data sets are corresponding
to the same scenarios above. We useWinbugsto run the simulation which are based on
10000 iterations each. The code is attached as Appendix C.
Once we obtain the posterior distributions ofµA,µB,σA,σB, we can use their means as
estimates and then figure out the distributions ofA andB. Since we are actually interested
in the distribution of the break time, we generate 1000 values ofA andB, and thus compute
1000 values of the break time so we can compute the kernel smoothing density estimate,
which are shown in Figure 11.1 and 11.2.

CHAPTER 11. SIMULATION 75
0 2 4 6 80
0.5
1
1.5
2
2.5
3
3.5
4
Den
sity
(5k
s)
k=0.1
1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
4
Den
sity
(10
ks)
0.5 1 1.5 2 2.50
0.5
1
1.5
2
2.5
3
3.5
4 k=0.5
0.5 1 1.5 2 2.50
1
2
3
4
5
Breaktime (in Hours) (data simulated from Madison function)
0 0.5 1 1.5 20
1
2
3
4
5 k=0.9
0 0.5 1 1.5 20
1
2
3
4
5
MadisonEDRM
Figure 11.1: PDFs of break time for different models, different values ofk and different
scenarios when the data is generated from Madison model.
0 10 20 30 400
0.05
0.1
0.15
0.2
0.25
Den
sity
(5k
s)
k=0.1
0 10 20 30 400
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Den
sity
(10
ks)
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35 k=0.5
0 5 10 15 200
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Breaktime (in Hours) (data simulated from EDRM function)
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7 k=0.9
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
MadisonEDRM
Figure 11.2: PDFs of break time for different models, different values ofk and different
scenarios when the data is generated from EDRM model.

Chapter 12
Conclusion and Discussion
12.1 Conclusion
We can also compute the means and the standard deviations fordifferent distributions in
Figure 11.1 and Figure 11.2, which is shown in Table 11.1 and 11.2.
From the table we can conclude that standard deviation decreases whenk increases.
We can also see that in general, if the data is generated from Madison model, the stan-
dard deviation for Madison model is smaller than the counterpart for EDRM; if the data
is generated from EDRM, the standard deviation for Madison model is greater than the
counterpart for EDRM, which is reasonable. Standard deviation of Scenario II is smaller
than the counterpart of Scenario I in each table, which meansreduction of noise does not
overcome the effect of have more values ofk. Moreover, whenk is larger, the difference
between Madison and EDRM is getting smaller in terms of mean.So we recommend to
use a largek when conducting experiments.
12.2 Discussion
If we fix the value ofk, there is no independent variable in
T =1k
{[k(B+1)
A
] 1B+1
+ τ0
}(12.1)
76

CHAPTER 12. CONCLUSION AND DISCUSSION 77
Table 12.1: Mean and standard deviation (SD) for each distribution when the data is gen-
erated from Madison model.
Scenario I k 0.1 0.5 0.9 k 0.1 0.5 0.9
Madisonmean
2.58 0.98 0.80SD
0.11 0.11 0.11
EDRM 1.77 1.21 0.96 0.41 0.21 0.16
Scenario II k 0.1 0.5 0.9 k 0.1 0.5 0.9
Madisonmean
2.61 1.00 0.83SD
0.10 0.10 0.10
EDRM 1.71 1.18 0.94 0.30 0.17 0.13
Table 12.2: Mean and standard deviation (SD) for each distribution when the data is gen-
erated from EDRM.
Scenario I k 0.1 0.5 0.9 k 0.1 0.5 0.9
Madisonmean
7.68 6.06 5.91SD
2.08 2.03 2.04
EDRM 12.39 7.26 5.41 3.05 1.24 0.80
Scenario II k 0.1 0.5 0.9 k 0.1 0.5 0.9
Madisonmean
7.90 6.29 6.11SD
1.34 1.33 1.32
EDRM 12.39 7.37 5.53 2.98 1.24 0.81

CHAPTER 12. CONCLUSION AND DISCUSSION 78
and we only have one break time for each lumber. This problem can lead to a more general
conclusion: if a model
y= f (A,B) (12.2)
has no independent variable, then it is impossible to estimate the parameters of Model
(12.2) by MCMC. We can not use the information ofy to recover the information ofA and
B. Put another way, we can think of (12.1) as
y= f (A,B)+x (12.3)
with data only available atx= 0. This model is actually a curve on the plane. It is impossi-
ble to determine a curve with two parameters using the data only at one value ofx because
the model involves two degrees of freedom.
The above conclusion holds for similar models with more thantwo parameters. How-
ever, if the model only involves one parameter, it can be estimated using data only available
at one value ofx because the degree of freedom of the model is also one.
As a result, we consider this model from another point of view: k can be the independent
variable because we can control the value ofk through a computer in practice. Then the
model reduces to a nonlinear model and we can either use leastsquares method or MCMC
to figure out the parameters and thus the break time.

Appendix A: Selection of Matlab code
for Chapter 3
We use Matlab as our main program to solve numerical problemsin Chapter 3. FDA
package used in Chapter 3 is posted on http://www.psych.mcgill.ca/misc/fda/.
Following is the matlab code for the FitzHugh-Nagumo equations; code for linear ODE
is quite similar:
odefn = @fhnfunode ;
fn . fn = @fhnfun ;
fn . d fdx = @fhndfdx ;
fn . d fdp = @fhndfdp ;
fn . d2fdx2 = @fhnd2fdx2 ;
fn . d2fdxdp = @fhnd2fdxdp ;
fn . d2fdp2 = @fhnd2fdp2 ;
fn . d3fdx3 = @fhnd3fdx3 ;
fn . d3fdx2dp = @fhnd3fdx2dp ;
fn . d3fdxdp2 = @fhnd3fdxdp2 ;
lambda = 1 e4 ;
y0 =[−1 ,1 ] ;
p a r s = [ 0 . 2 ; 0 . 2 ; 3 ] ;
sigma = 1 ;
t sp an = 0 : 0 . 1 : 2 0 ;
o b s_ p t s {1} = 1 :l e n g t h( t sp an ) ;
o b s_ p t s {2} = 1 :l e n g t h( t sp an ) ;
t f i n e = 0 : 0 . 0 5 : 2 0 ;
o d eo p t s = o d ese t ( ’ Re lTo l ’ ,1 e−8) ;
[ f u l l _ t i m e , f u l l _ p a t h ] = ode45( odefn , tspan , y0 , odeopts , p a r s ) ;
[ p l o t _ t i m e , p l o t _ p a t h ] = ode45( odefn , t f i n e , y0 , odeopts , p a r s ) ;
T c e l l = c e l l ( 1 ,s i z e( f u l l _ p a t h , 2 ) ) ;
p a t h _ c e l l = T c e l l ;
f o r j = 1 : l e n g t h( o b s_ p t s )
T c e l l { j } = f u l l _ t i m e ( o b s_ p t s { j } ) ;
p a t h _ c e l l { j } = f u l l _ p a t h ( o b s_ p t s { j } , j ) ;
end
wts = [ ] ;
lambda0 = 1 ;
n k n o t s = 201;
n o r d e r = 3 ;
79

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 80
nquad = 5 ;
Y ce l l = p a t h _ c e l l ;
range = [min ( f u l l _ t i m e ) ,max( f u l l _ t i m e ) ] ;
k n o t s = l i n s p a c e( range ( 1 ) , range ( 2 ) , n k n o t s ) ;
n b a s i s = n k n o t s+norder−2;
q u ad v a l s = [ kno ts ’ ones (l e n g t h( k n o t s ) , 1 ) / n k n o t s ] ;
b a s i s _ c e l l = c e l l ( 1 ,l e n g t h( Y ce l l ) ) ;
L f d _ c e l l = c e l l ( 1 , l e n g t h( Y ce l l ) ) ;
b b a s i s = MakeBasis ( range , n b as i s , norder , kno ts , quadva ls, 1 ) ;
b a s i s _ c e l l ( : ) = { b b a s i s } ;
L f d _ c e l l ( : ) = { f d P a r ( b b as i s , 1 , lambda0 ) } ;
b b a s i s = MakeBasis ( range , n b as i s , norder , kno ts , quadva ls, 1 ) ;
A0= e v a l _ b a s i s ( kno ts , b b as i s , 0 ) ;
A1= e v a l _ b a s i s ( kno ts , b b as i s , 1 ) ;
h =1 / ( nkno ts−1) ;
W=ze r o s( nknots , n k n o t s ) ;
W( 1 ,1 ) =1 / 3∗h ;
W( nknots , n k n o t s )=1 /3∗h ;
f o r j =2 : ( nkno ts−1) ;
i f (mod ( j , 2 ) ==0 )
W( j , j )=4 /3∗h ;
e l s e W( j , j )=2 /3∗h ;
end
end
t o l _ v a l =1e−6;
o p t i o n s _ o u t = o p t i m s e t ( ’ D e r i v a t i v eCh eck ’ , ’ o f f ’ , . . .
’ Jaco b i an ’ , ’ o f f ’ , ’ D i sp l ay ’ , ’ o f f ’ , ’ Max I te r ’ , . . .
1000 , ’ TolFun ’ , t o l _ v a l , ’ TolX ’ , t o l _ v a l ) ;
o p t i o n s _ i n = o p t i m s e t ( ’ D e r i v a t i v eCh eck ’ , ’ o f f ’ , . . .
’ Jaco b i an ’ , ’ on ’ , ’ D i sp l ay ’ , ’ o f f ’ , ’ Max I te r ’ , . . .
1000 , ’ TolFun ’ , t o l _ v a l , ’ TolX ’ , t o l _ v a l , . . .
’ JacobMul t ’ , @SparseJMfun ) ;
backup =[0 .732∗sigma ,0 .9 8 2∗ sigma ,1 .3 4 5∗ sigma ] ;
t a b l e = c e l l ( 3 , 4 ) ;
sim =100;
s t a r t p a r s = p a r s ;
f o r mm=1 : 3 ;
f o r nn =1 : 4 ;
t h r e s h o l d =backup (mm) ;
p r o f i l e = ze r o s( sim , 3 ) ;
r o b u s t = ze r o s( sim , 3 ) ;
f o r i =1 : sim
Y ce l l = d a t a {nn }{ i } ;
DEfd = sm o o t h f d _ ce l l ( Yce l l , Tce l l , L f d _ c e l l ) ;
co e f s = g e t c e l l c o e f s ( DEfd ) ;
%p r o f i l i n g
f1=@( p a r ) Hnorm ( par , lambda , A0 , A1 , . . .
Yce l l ,W, coefs , o p t i o n s _ i n ) ;
b e t a1 = l s q n o n l i n ( f1 , s t a r t p a r s , [ ] , [ ] , o p t i o n s _ o u t ) ;
p r o f i l e ( i , : ) = beta1 ’ ;
%r o b u s t
f2=@( p a r ) H( par , lambda , A0 , A1 , Yce l l ,W, . . .
coefs , o p t i o n s_ i n , t h r e s h o l d ) ;
b e t a2 = l s q n o n l i n ( f2 , s t a r t p a r s , [ ] , [ ] , o p t i o n s _ o u t ) ;

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 81
r o b u s t ( i , : ) = beta2 ’ ;
d i s p l a y ( [ ’ S i m u l a t i o n = ’ , num2st r( [mm, nn , i ] ) ] ) ;
end
BIAS =[ mean( p r o f i l e ( : , 1 ) )− p a r s ( 1 ) , . . .
mean( r o b u s t ( : , 1 ) )− p a r s ( 1 ) ; . . .
mean( p r o f i l e ( : , 2 ) )− p a r s ( 2 ) , . . .
mean( r o b u s t ( : , 2 ) )− p a r s ( 2 ) ; . . .
mean( p r o f i l e ( : , 3 ) )− p a r s ( 3 ) , . . .
mean( r o b u s t ( : , 3 ) )− p a r s ( 3 ) ] ;
SE=[s t d( p r o f i l e ( : , 1 ) ) , s t d( r o b u s t ( : , 1 ) ) ; . . .
s t d( p r o f i l e ( : , 2 ) ) , s t d( r o b u s t ( : , 2 ) ) ; . . .
s t d( p r o f i l e ( : , 3 ) ) , s t d( r o b u s t ( : , 3 ) ) ] ;
RMSE=[s q r t ( ( p r o f i l e ( : ,1 )− p a r s ( 1 ) ) ’∗ . . .
( p r o f i l e ( : ,1 )− p a r s ( 1 ) ) / sim ) , . . .
s q r t ( ( r o b u s t ( : ,1 )− p a r s ( 1 ) ) ’ . . .
∗( r o b u s t ( : ,1 )− p a r s ( 1 ) ) / sim ) ; . . .
s q r t ( ( p r o f i l e ( : ,2 )− p a r s ( 2 ) ) ’ . . .
∗( p r o f i l e ( : ,2 )− p a r s ( 2 ) ) / sim ) , . . .
s q r t ( ( r o b u s t ( : ,2 )− p a r s ( 2 ) ) ’ . . .
∗( r o b u s t ( : ,2 )− p a r s ( 2 ) ) / sim ) ; . . .
s q r t ( ( p r o f i l e ( : ,3 )− p a r s ( 3 ) ) ’ . . .
∗( p r o f i l e ( : ,3 )− p a r s ( 3 ) ) / sim ) , . . .
s q r t ( ( r o b u s t ( : ,3 )− p a r s ( 3 ) ) ’∗ . . .
( r o b u s t ( : ,3 )− p a r s ( 3 ) ) / sim ) ] ;
t a b l e {mm, nn }=[ BIAS , SE ,RMSE] ;
end
end
Following is the matlab code for the Predator-Prey model:
d e l t a t r u = 0 . 6 8 ;
N i t r u = 8 0 ;
e p s i l o n t r u = 0 . 2 5 ;
l am b t r u = 0 . 4 ;
mtru = 0 . 0 5 5 ;
b c t r u = 3 . 3 ;
b b t r u = 2 . 2 5 ;
k c t r u = 4 . 3 ;
k b t r u = 1 5 . 0 ;
% t h e i n i t a l p a r am e t e r s
f i t s t r u c t . d e l t a = d e l t a t r u ;
f i t s t r u c t . Ni = N i t r u ;
f i t s t r u c t .m = mtru ;
f i t s t r u c t . e p s i l o n = e p s i l o n t r u ;
f i t s t r u c t . lamb = l am b t r u ;
f i t s t r u c t . bc = b c t r u ;
f i t s t r u c t . bb = b b t r u ;
f i t s t r u c t . kc = k c t r u ;
f i t s t r u c t . kb = k b t r u ;
d a t a = data068 ;
[ nobs , n co l ] = s i z e( d a t a ) ;
% c r e a t e b a s i s f o r a l l f o u r f u n c t i o n a l v a r i a b l e s

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 82
% d e l e t e t h e f i r s t t h r e e o b s e r v a t i o n s
sp = 3 ;
t o b s = d a t a ( sp : nobs , 1 ) ;
Cobs = d a t a ( sp : nobs , 2 ) ;
Bobs = d a t a ( sp : nobs , 3 ) ;
nobs = l e n g t h( t o b s ) ;
N i n i t = N i t r u ;
C i n i t = Cobs ( 1 ) ;
R i n i t = Bobs ( 1 ) ;
B i n i t = Bobs ( 1 ) ;
y i n i t = [ N i n i t , C i n i t , R i n i t , B i n i t ] ;
o d eo p t i o n s = o d ese t ( ’ Re lTo l ’ ,1 e−7, ’ AbsTol ’ ,1 e−7) ;
t f i n e = l i n s p a c e( t o b s ( 1 ) , t o b s ( nobs ) , 1 0 0 ) ;
% so l v e d i f f e r e n t i a l e q u a t i o n wi th ex ac t p a r am e t e r s
[ t o u t , so l u ] = ode45( @ppode , tobs , y i n i t , o d eo p t i o n s , f i t s t r u c t ) ;
[ t o u t , s o l u f i n e ] = ode45( @ppode , t f i n e , y i n i t , o d eo p t i o n s , . . .
f i t s t r u c t ) ;
Nsolu = so l u ( : , 1 ) ;
Cso lu = so l u ( : , 2 ) ;
Rso lu = so l u ( : , 3 ) ;
Bso lu = so l u ( : , 4 ) ;
conC = ( so l u ( : , 2 ) ’∗ Cobs ) / ( Cobs ’∗Cobs ) ;
conB = ( so l u ( : , 4 ) ’∗ Bobs ) / ( Bobs ’∗Bobs ) ;
d i s p l a y (num2st r( [ conC conB ] ) )
Cobs = Cobs .∗ conC ;
Bobs = Bobs .∗ conB ;
% i n i t i a l v a l u e f o r v a r i a b l e s
N i n i t = N i t r u ;
C i n i t = Cobs ( 1 ) ;
R i n i t = Bobs ( 1 ) ;
B i n i t = Bobs ( 1 ) ;
o d eo p t i o n s = o d ese t ( ’ Re lTo l ’ ,1 e−10, ’ AbsTol ’ ,1 e−10) ;
nos =6;
b e t a= c e l l ( nos , 1 ) ;
SSErob=ze r o s( nos , 1 ) ;
SSEpro=ze r o s( nos , 1 ) ;
SSEfus=ze r o s( nos , 1 ) ;
MSErob=ze r o s( nos , 1 ) ;
MSEpro=ze r o s( nos , 1 ) ;
MSEfus=ze r o s( nos , 1 ) ;
i n i t i a l = c e l l ( nos , 1 ) ;
f o r lam =1:6
y i n i t =g iven { lam } ;
% By my p r o f i l i n g code
p r o p a r . d e l t a = d e l t a t r u ;
p r o p a r . Ni = N i t r u ;
p r o p a r .m = e s t p r o { lam } ( 6 ) ;
p r o p a r . e p s i l o n = e s t p r o { lam } ( 5 ) ;
p r o p a r . lamb = e s t p r o { lam } ( 7 ) ;
p r o p a r . bc = e s t p r o { lam } ( 1 ) ;
p r o p a r . bb = e s t p r o { lam } ( 3 ) ;
p r o p a r . kc = e s t p r o { lam } ( 2 ) ;

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 83
p r o p a r . kb = e s t p r o { lam } ( 4 ) ;
% so l v e d i f f e r e n t i a l e q u a t i o n wi th ex ac t p a r am e t e r s
[ t o u t , so l u ] = ode45( @ppode , tobs , y i n i t , o d eo p t i o n s , p r o p a r ) ;
Nsolu = so l u ( : , 1 ) ;
Cso lu = so l u ( : , 2 ) ;
Rso lu = so l u ( : , 3 ) ;
Bso lu = so l u ( : , 4 ) ;
% c r e a t e b a s i s f o r N, C ,R and B
n o r d e r = 4 ;
k n o t s = l i n s p a c e( t o b s ( 1 ) , t o b s ( nobs ) , 1 0 0 ) ;
Tl im = max( t o b s ) ;
n b a s i s = l e n g t h( k n o t s ) + n o r d e r− 2 ;
b a s i s o b j = c r e a t e _ b s p l i n e _ b a s i s ( [ t o b s ( 1 ) , Tl im ] , [ ] , . . .
norder , k n o t s ) ;
% % s e t up q u a d r a t u r e p o i n t s and w e i g h t s
nquad = 3 ;
[ b a s i s o b j , quadpts , quadwts ] = q u ad se t ( nquad , b a s i s o b j ) ;
% smooth t h e d a t a wi th t h e s e v a l u es
lambdaN = 0 . 1 ;
NfdPar = f d P a r ( b a s i s o b j , 2 , lambdaN ) ;
[ NfdD2 , Ndf , Ngcv ] = sm o o t h _ b as i s ( tobs , Nsolu , NfdPar ) ;
lambdaC = 0 . 1 ;
CfdPar = f d P a r ( b a s i s o b j , 2 , lambdaC ) ;
[ CfdD2 , Cdf , Cgcv ] = sm o o t h _ b as i s ( tobs , Cobs , CfdPar ) ;
lambdaR = 0 . 1 ;
RfdPar = f d P a r ( b a s i s o b j , 2 , lambdaR ) ;
[ RfdD2 , Rdf , Rgcv ] = sm o o t h _ b as i s ( tobs , Rsolu , RfdPar ) ;
lambdaB = 0 . 1 ;
BfdPar = f d P a r ( b a s i s o b j , 2 , lambdaB ) ;
[ BfdD2 , Bdf , Bgcv ] = sm o o t h _ b as i s ( tobs , Bobs , BfdPar ) ;
% [ Ndf , Ngcv ; Cdf , Cgcv ; Rdf , Rgcv ; Bdf , Bgcv ] ;
% Resu l t by smooth d a t a wi th D2x ( t ) ,
% which a r e t h e i n i t i a l v a l u e o f co e f ;
Ncoef = g e t c o e f ( NfdD2 ) ;
Ccoef = g e t c o e f ( CfdD2 ) ;
Rcoef = g e t c o e f ( RfdD2 ) ;
Bcoef = g e t c o e f ( BfdD2 ) ;
coef0 = [ Ncoef ; Ccoef ; Rcoef ; Bcoef ] ;
% s e t up d a t a s t r u c t
% w e i g h t s f o r v a r i a b l e s
Nobs = Nsolu ;
Robs = Rso lu ;
Nwt = v a r ( Nobs ) ;
Cwt = v a r ( Cobs ) ;
Rwt = v a r ( Robs ) ;
Bwt = v a r ( Bobs ) ;
wt = [ Nwt , Cwt , Rwt , Bwt ] ;
% w e i g h t s f o r v a r i a b l e s

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 84
d a t s t r u c t . Nwt = Nwt ;
d a t s t r u c t . Cwt = Cwt ;
d a t s t r u c t . Rwt = Rwt ;
d a t s t r u c t . Bwt = Bwt ;
% d a t a
d a t s t r u c t . y = [ Cobs , Bobs ] ;
d a t s t r u c t . t o b s = t o b s ;
% b a s i s v a l u es a t sampl ing p o i n t s
b as i sm a t = e v a l _ b a s i s ( tobs , b a s i s o b j ) ;
Dbas ismat = e v a l _ b a s i s ( tobs , b a s i s o b j , 1 ) ;
d a t s t r u c t . b as i sm a t = b as i sm a t ;
d a t s t r u c t . Dbas ismat = Dbasismat ;
% b a s i s v a l u es a t q u a d r a t u r e p o i n t s
q u ad b as i sm a t = e v a l _ b a s i s ( quadpts , b a s i s o b j ) ;
s i z e( q u ad b as i sm a t ) ;
Dquadbas ismat = e v a l _ b a s i s ( quadpts , . . .
b a s i s o b j , 1 ) ;
d a t s t r u c t . q u ad p t s = q u ad p t s ;
d a t s t r u c t . quadwts = quadwts ;
d a t s t r u c t . q u ad b as i sm a t = q u ad b as i sm a t ;
d a t s t r u c t . Dquadbas ismat = Dquadbas ismat ;
% s e t up f i t s t r u c t t h a t c o n t a i n s needed i n f o f o r
% P P f i t and PPfn smooth d a t a wi th DIFEs
f i t s t r u c t . coef0 = coef0 ;
co e f = coef0 ;
t o l v a l = 1e−10;
i t e r m ax = 100;
t o l v a l = 1e−12;
o p t i o n sP P f n = o p t i m s e t ( ’ La r g eS ca l e ’ , ’ on ’ , . . .
’ D e r i v a t i v eCh eck ’ , ’ o f f ’ , ’ D i sp l ay ’ , . . .
’ i t e r ’ , ’ Max I te r ’ , i te rmax , . . .
’ TolCon ’ , t o l v a l , ’ TolFun ’ , t o l v a l , . . .
’ TolX ’ , t o l v a l , ’TolPCG ’ , t o l v a l , . . .
’ Jaco b i an ’ , ’ on ’ ) ;
gradwrd = 1 ;
lambda = ones ( 4 , 1 ) .∗ ( 0 . 1 ) ;
% i n i t i a l smooth ing
t i c
[ coef , resnorm , r e s i d u a l , e x i t f l a g ] = . . .
l s q n o n l i n ( @PPfitLS , coef0 , [ ] , [ ] , o p t i o n sP P f n , . . .
d a t s t r u c t , f i t s t r u c t , lambda , gradwrd ) ;
t o c
f i t s t r u c t . coef0 = co e f ;
[ nobs , n b a s i s ] = s i z e( d a t s t r u c t . b as i sm a t ) ;
ind1 = 1 : n b a s i s ;
ind2 = ( n b a s i s +1 ) : ( 2∗ n b a s i s ) ;
ind3 = (2∗ n b a s i s +1 ) : ( 3∗ n b a s i s ) ;
ind4 = (3∗ n b a s i s +1 ) : ( 4∗ n b a s i s ) ;
ph imat = d a t s t r u c t . b as i sm a t ;
% r e s u l t by smooth d a t a wi th DIFEs

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 85
Ncoef = co e f ( ind1 ) ;
Ccoef = co e f ( ind2 ) ;
Rcoef = co e f ( ind3 ) ;
Bcoef = co e f ( ind4 ) ;
t f i n e m a t = e v a l _ b a s i s ( t f i n e , b a s i s o b j ) ;
Nhat = t f i n e m a t∗Ncoef ;
Chat = t f i n e m a t∗Ccoef ;
Rhat = t f i n e m a t∗Rcoef ;
Bhat = t f i n e m a t∗Bcoef ;
% S e t up i n i t i a l v a l u es f o r t h e p a r am e t e r s ,
% h e r e we use t h e t r u e v a l u es .
p a r v e c t r u ( 1 ) = e p s i l o n t r u ;
p a r v e c t r u ( 2 ) = l am b t r u ;
p a r v e c t r u ( 3 ) = mtru ;
p a r v e c t r u ( 4 ) = b c t r u ;
p a r v e c t r u ( 5 ) = b b t r u ;
p a r v e c t r u ( 6 ) = k c t r u ;
p a r v e c t r u ( 7 ) = k b t r u ;
% e s t i m a t e a l l p a r am e t e r s ex cep t
% f i x e t h e f i r s t c o e f f i c i e n t t o be 0 ;
f i t s t r u c t . e s t i m a t e = ones ( 7 , 1 ) ;
e s t i n d = f i n d ( f i t s t r u c t . e s t i m a t e == 1 ) ;
% s e t t h e o p t i m i z a t i o n p a r am e t e r s f o r t h e o u t e r
% o p t i m i z a t i o n on ly f u n c t i o n v a l u es a r e used
% a t t h i s p o i n t
t o l v a l = 1e−10;
o p t i o n sP P f n = o p t i m s e t ( ’ La r g eS ca l e ’ , ’ on ’ , . . .
’ D e r i v a t i v eCh eck ’ , ’ o f f ’ , ’ D i sp l ay ’ , . . .
’ i t e r ’ , ’ Max I te r ’ , 50 , . . .
’ TolCon ’ , t o l v a l , ’ TolFun ’ , t o l v a l , . . .
’ TolX ’ , t o l v a l , ’TolPCG ’ , t o l v a l , . . .
’ Jaco b i an ’ , ’ on ’ ) ;
gradwrd = 1 ;
parvec0 = p a r v e c t r u ( e s t i n d ) ;
p a r v ec = parvec0 ;
lambda2 = ones ( 4 , 1 ) .∗ ( 1 0 ^ 2 ) ;
Y ce l l = c e l l ( 4 , 1 ) ;
Y ce l l {1}=Nobs ;
Y ce l l {2}=Cobs ;
Y ce l l {3}=Robs ;
Y ce l l {4}=Bobs ;
%Simpson ’ s r u l e
n k n o t s=l e n g t h( q u ad p t s ) ;
h =1 / ( nkno ts−1) ;
W=ze r o s( nknots , n k n o t s ) ;
W( 1 ,1 ) =1 / 3∗h ;
W( nknots , n k n o t s )=1 /3∗h ;
f o r j =2 : ( nkno ts−1) ;
i f ( mod ( j , 2 ) ==0 )
W( j , j )=4 /3∗h ;
e l s e W( j , j )=2 /3∗h ;
end
end

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 86
A0= q u ad b as i sm a t ;
A1=Dquadbas ismat ;
A2= b as i sm a t ;
co e f s =[ Ncoef ; Ccoef ; Rcoef ; Bcoef ] ;
t o l v a l = 1e−12;
o p t i o n s _ o u t = o p t i m s e t ( ’ D e r i v a t i v eCh eck ’ , ’ o f f ’ , . . .
’ Jaco b i an ’ , ’ o f f ’ , ’ D i sp l ay ’ , ’ i t e r ’ , ’ Max I te r ’ , . . .
100 , ’ TolFun ’ , t o l v a l , ’ TolX ’ , t o l v a l , . . .
’ MaxFunEval ’ , 1 0 0 0 0 ) ;
o p t i o n s _ i n = o p t i m s e t ( ’ D e r i v a t i v eCh eck ’ , ’ o f f ’ , . . .
’ Jaco b i an ’ , ’ o f f ’ , ’ D i sp l ay ’ , ’ i t e r ’ , ’ Max I te r ’ , . . .
100 , ’ TolFun ’ , t o l v a l , ’ TolX ’ , t o l v a l , . . .
’ JacobMul t ’ , @SparseJMfun , ’ MaxFunEval ’ , 1 0 0 0 0 ) ;
e p s i l o n p r o = 0 . 1 1 ;
lambpro = 0 . 0 1 ;
mpro = 0 . 1 5 2 ;
bcpro = 3 . 9 ;
bbpro = 1 . 9 7 ;
kcpro = 4 . 3 ;
kbpro = 1 5 . 7 ;
s t a r t p a r = l o g ( [ bcpro , kcpro , bbpro , kbpro , . . .
ep s i l o n p r o , mpro , lambpro ] ) ;
k1=s q r t ( 1 7 6 .0 7 4 3 / 1 1 )∗1 .3 4 5 ;
k2=s q r t ( 1 6 . 2 1 8 8 / 1 2 )∗1 . 3 4 5 ;
k =[ k1 , k2 ] ;
wt = 1 . / wt ;
t i c
lambda =10^( lam +1 ) ;
fun = @( p a r ) H( par , lambda , Yce l l ,W, A0 , A1 , A2 , . . .
coefs , o p t i o n s_ i n , k , wt ) ;
b e t a{ lam}= l s q n o n l i n ( fun , s t a r t p a r , [ ] , [ ] , o p t i o n s _ o u t ) ;
temp=@( c ) G( c ,b e t a{ lam } , lambda , Yce l l ,W, A0 , A1 , A2 , k , wt ) ;
C o e f i t = l s q n o n l i n ( temp , coefs , [ ] , [ ] , o p t i o n s _ i n ) ;
b e t a{ lam}= exp( b e t a{ lam } ) ;
t o c
mm=l e n g t h( C o e f i t ) ;
temp1=A0∗C o e f i t ( 1 : (mm/ 4 ) ) ;
temp2=A0∗C o e f i t ( (mm/ 4 +1 ) : ( 2∗mm/ 4 ) ) ;
temp3=A0∗C o e f i t ( (2∗mm/ 4 +1 ) : ( 3∗mm/ 4 ) ) ;
temp4=A0∗C o e f i t ( (3∗mm/ 4 + 1 ) :end) ;
i n i t i a l { lam }=[ temp1 ( 1 ) , temp2 ( 1 ) , temp3 ( 1 ) , temp4 ( 1 ) ] ;
r o b u s t . d e l t a = d e l t a t r u ;
r o b u s t . Ni = N i t r u ;
r o b u s t .m = b e t a{ lam } ( 6 ) ;
r o b u s t . e p s i l o n = b e t a{ lam } ( 5 ) ;
r o b u s t . lamb = b e t a{ lam } ( 7 ) ;
r o b u s t . bc = b e t a{ lam } ( 1 ) ;
r o b u s t . bb = b e t a{ lam } ( 3 ) ;

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 87
r o b u s t . kc = b e t a{ lam } ( 2 ) ;
r o b u s t . kb = b e t a{ lam } ( 4 ) ;
Fussmann . d e l t a = d e l t a t r u ;
Fussmann . Ni = N i t r u ;
Fussmann .m = 0 . 0 5 5 ;
Fussmann . e p s i l o n = 0 . 2 5 ;
Fussmann . lamb = 0 . 4 0 ;
Fussmann . bc = 3 . 3 ;
Fussmann . bb = 2 . 2 5 ;
Fussmann . kc = 4 . 3 ;
Fussmann . kb = 1 5 . 0 ;
[ junk , f u s ] = ode45( @ppode , tobs , y i n i t , . . .
o d eo p t i o n s , Fussmann ) ;
[ junk , f u s f i n e ] = ode45( @ppode , t f i n e , y i n i t , . . .
o d eo p t i o n s , Fussmann ) ;
C f u s f i n e = f u s f i n e ( : , 2 ) ;
B f u s f i n e = f u s f i n e ( : , 4 ) ;
Cfus = f u s ( : , 2 ) ;
Bfus = f u s ( : , 4 ) ;
[ junk , rob ] = ode45( @ppode , tobs , i n i t i a l { lam } , . . .
o d eo p t i o n s , r o b u s t ) ;
[ junk , r o b f i n e ] = ode45( @ppode , t f i n e , . . .
i n i t i a l { lam } , o d eo p t i o n s , r o b u s t ) ;
C r o b f i n e = r o b f i n e ( : , 2 ) ;
B r o b f i n e = r o b f i n e ( : , 4 ) ;
Crob = rob ( : , 2 ) ;
Brob = rob ( : , 4 ) ;
[ junk , p ro ] = ode45( @ppode , tobs , y i n i t , . . .
o d eo p t i o n s , p r o p a r ) ;
[ junk , p r o f i n e ] = ode45( @ppode , t f i n e , y i n i t , . . .
o d eo p t i o n s , p r o p a r ) ;
Cp r o f i n e = p r o f i n e ( : , 2 ) ;
Bp r o f i n e = p r o f i n e ( : , 4 ) ;
Cpro = pro ( : , 2 ) ;
Bpro = pro ( : , 4 ) ;
% compare Robust w i th P r o f i l i n g
h = f i g u r e ;
s u b p l o t( 2 , 1 , 1 )
p l o t ( tobs , Cobs , ’ ok ’ , ’ MarkerS ize ’ , 5 , ’ MarkerFace ’ , ’ k ’ )
ho ld on
p l o t ( t f i n e , C f u s f i n e , ’ : k ’ , ’ LineWidth ’ , 2 )
p l o t ( t f i n e , Cpro f ine , ’−−k ’ , ’ LineWidth ’ , 2 )
p l o t ( t f i n e , Crob f ine , ’−k ’ , ’ LineWidth ’ , 2 )
f o r i i =1 : l e n g t h( Cobs ) ;
i f abs( Cobs ( i i )−Crob ( i i ) ) > k1 ;
p l o t ( t o b s ( i i ) , Cobs ( i i ) , ’ ok ’ , ’ LineWidth ’ , . . .
2 , ’ MarkerS ize ’ , 1 2 )
end
end
ho ld o f f
x l im ( [ min ( t o b s ) ,max( t o b s ) ] ) ;
y l a b e l ( ’ C h l o r e l l a ’ , ’ F o n t S i ze ’ , 1 5 )
h legend =l eg en d( ’ Data ’ , ’ Fussmann ’ , . . .
’ P a r am e t e r Cascad ing ’ , ’ Robust ’ , ’ O u t l i e r ’ , 3 ) ;
s e t( h legend , ’ F o n t S i ze ’ , 8 ) ;
s u b p l o t( 2 , 1 , 2 )
p l o t ( tobs , Bobs , ’ ok ’ , ’ MarkerS ize ’ , 5 , ’ MarkerFace ’ , ’ k ’ )

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 88
ho ld on
p l o t ( t f i n e , B f u s f i n e , ’ : k ’ , ’ LineWidth ’ , 2 )
p l o t ( t f i n e , Bpro f ine , ’−−k ’ , ’ LineWidth ’ , 2 )
p l o t ( t f i n e , Brob f ine , ’−k ’ , ’ LineWidth ’ , 2 )
f o r i i =1 : l e n g t h( Bobs ) ;
i f abs( Bobs ( i i )−Brob ( i i ) ) > k2 ;
p l o t ( t o b s ( i i ) , Bobs ( i i ) , ’ ok ’ , ’ LineWidth ’ , . . .
2 , ’ MarkerS ize ’ , 1 2 )
end
end
ho ld o f f
x l im ( [ min ( t o b s ) ,max( t o b s ) ] ) ;
y l im ( [ 0 , 1 2 ] ) ;
x l a b e l ( ’ Time ( minu tes ) ’ , ’ F o n t S i ze ’ , 1 5 )
y l a b e l ( ’ B r ach i o n u s ’ , ’ F o n t S i ze ’ , 1 5 )
mm=0;
nn =0;
f o r i i =1 : l e n g t h( t o b s ) ;
i f abs( Cobs ( i i )−Crob ( i i ) ) > k1 ;
Crob ( i i )= Cobs ( i i ) ;
Cpro ( i i )= Cobs ( i i ) ;
Cfus ( i i )= Cobs ( i i ) ;
mm=mm+1;
end
i f abs( Bobs ( i i )−Brob ( i i ) ) > k2 ;
Brob ( i i )= Bobs ( i i ) ;
Bpro ( i i )= Bobs ( i i ) ;
Bfus ( i i )= Bobs ( i i ) ;
nn=nn +1;
end
end
SSErob ( lam ) = ( wt ( 2 )∗ ( Cobs−Crob ) ’∗ ( Cobs−Crob ) + . . .
wt ( 4 )∗ ( Bobs−Brob ) ’∗ ( Bobs−Brob ) ) ;
SSEpro ( lam ) = ( wt ( 2 )∗ ( Cobs−Cpro ) ’∗ ( Cobs−Cpro ) + . . .
wt ( 4 )∗ ( Bobs−Bpro ) ’∗ ( Bobs−Bpro ) ) ;
SSEfus ( lam ) = ( wt ( 2 )∗ ( Cobs−Cfus ) ’∗ ( Cobs−Cfus ) + . . .
wt ( 4 )∗ ( Bobs−Bfus ) ’∗ ( Bobs−Bfus ) ) ;
MSErob( lam )= SSErob ( lam ) / ( 2∗ l e n g t h( t o b s )−mm−nn ) ;
MSEpro( lam )= SSEpro ( lam ) / ( 2∗ l e n g t h( t o b s )−mm−nn ) ;
MSEfus ( lam )= SSEfus ( lam ) / ( 2∗ l e n g t h( t o b s )−mm−nn ) ;
MSEofALL=[ MSEfus ( lam ) , MSEpro( lam ) , MSErob( lam ) ] ;
num2st r(MSEofALL)
% Sandwich e s t i m a t o r s
b a s i s _ c e l l = c e l l ( 1 , 4 ) ;
T c e l l = c e l l ( 1 , 4 ) ;
f o r mm=1 : 4 ;
b a s i s _ c e l l {mm} = b a s i s o b j ;
T c e l l {mm}= t o b s ;
end
tDEfd = Make_fdce l l ( Co e f i t , b a s i s _ c e l l ) ;
t h e t a =[b e t a{ lam } ( 5 ) , b e t a{ lam } ( 7 ) , b e t a{ lam } ( 6 ) , . . .
b e t a{ lam } ( 1 ) , b e t a{ lam } ( 3 ) , b e t a{ lam } ( 2 ) , b e t a{ lam } ( 4 ) ] ;
parname={ ’ e p s i l o n ’ , ’ lamb ’ , ’m’ , ’ bc ’ , ’ bb ’ , ’ kc ’ , ’ kb ’ } ;
Y ce l l =Yce l l ’ ;
wts=wt ;
t h r e s h o l d = c e l l ( 1 , 4 ) ;
t h r e s h o l d {1} = −1;

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 89
t h r e s h o l d {2} = k1 ;
t h r e s h o l d {3} = −1;
t h r e s h o l d {4} = k2 ;
fn . fn = @PPfun;
fn . d fdx = @PPdfdx ;
fn . d fdp = @PPdfdp ;
fn . d2fdx2 = @PPd2fdx2 ;
fn . d2fdxdp = @PPd2fdxdp ;
fn . d2fdp2 = @PPd2fdp2;
fn . d3fdx3 = @PPd3fdx3 ;
fn . d3fdx2dp = @PPd3fdx2dp ;
fn . d3fdxdp2 = @PPd3fdxdp2 ;
DEfd=tDEfd ;
o l d p a r s = [ ] ;
p e n _ e x t r a s = [ ] ;
dpen = [ ] ;
pen = [ ] ;
f n _ e x t r a s = [ ] ;
p a r s = t h e t a ;
% Conver t wts , lambda and Y ce l l t o t h e r i g h t f o r m a t :
[ wts , lambda , Y ce l l ] = w e i g h t s l am b d asY ce l l . . .
( wts , lambda , Y ce l l ) ;
% By d e f a u l t , system has no a l g e b r a i c components .
a l g = ones (l e n g t h( Y ce l l ) , 1 ) ;
% Now l e t s s t a r t .
b a s i s _ c e l l = g e t c e l l b a s i s ( DEfd ) ;
Zm a t _ ce l l = e v a l _ b a s i s _ c e l l ( Tce l l , b a s i s _ c e l l , 0 ) ;
[ f , Zmat ] = d j d c _ p t s ( DEfd , Yce l l , Tce l l , wts ) ;
d2Gdc2 = make_d2gdc2 ( DEfd , fn , Yce l l , Tce l l , wts , . . .
t h r e s h o l d , lambda , pars , a lg , f n _ e x t r a s ) ;
d2Gdcdp = make_d2gdcdp ( DEfd , fn , lambda , pars , . . .
a lg , f n _ e x t r a s ) ;
dcdp = −d2Gdc2 \ d2Gdcdp ;
nobs = s i z e( Zmat , 1 ) ;
np = l e n g t h( p a r s ) ;
ncomp = s i z e( Yce l l , 2 ) ;
[ wts , lambda , Y ce l l ] = w e i g h t s l am b d asY ce l l . . .
( wts , lambda , Y ce l l ) ;
d3Gdcdp2 = make_d3gdcdp2 ( DEfd , fn , lambda , pars , . . .
a lg , f n _ e x t r a s ) ;
d3Gdc3 = make_d3gdc3 ( DEfd , fn , lambda , pars , . . .
a lg , f n _ e x t r a s ) ;
d3Gdc2dp = make_d3gdc2dp ( DEfd , fn , lambda , pars , . . .
a lg , f n _ e x t r a s ) ;
d2cdp2 = ze r o s( l e n g t h( d3Gdc3 ) ,l e n g t h( p a r s ) ,l e n g t h( p a r s ) ) ;
d3Gdc2dpmat=ze r o s( [ s i z e( d3Gdc2dp { 1 } ) ,l e n g t h( p a r s ) ] ) ;
f o r k =1 : l e n g t h( p a r s )
d3Gdc2dpmat ( : , : , k )= d3Gdc2dp{k } ;
end
f o r j = 1 : l e n g t h( d3Gdcdp2)
d2cdp2 ( : , : , j ) =d3Gdcdp2{ j }+d3Gdc2dp{ j }∗dcdp ;
f o r i =1 : s i z e( dcdp , 1 )
d2cdp2 ( : , : , j )= d2cdp2 ( : , : , j ) + . . .
squeeze ( d3Gdc2dpmat ( : , i , : ) )∗ dcdp ( i , j ) . . .
+d3Gdc3{ i }∗dcdp ( i , j )∗dcdp ;

APPENDIX A: SELECTION OF MATLAB CODE FOR CHAPTER 3 90
end
d2cdp2 ( : , : , j )=−d2Gdc2 \ d2cdp2 ( : , : , j ) ;
end
eY ce l l = e v a l _ f d c e l l ( Tce l l , DEfd , 0 ) ;
d rho = c e l l ( ncomp , 1 ) ;
d2rho = c e l l ( ncomp , 1 ) ;
f o r i = 1 : ncomp
n = l e n g t h( wts ( i ) ) ;
i f ~ isempty( T c e l l { i } )
n b a s i s = s i z e( Zm a t _ ce l l { i } , 2 ) ;
d rho { i } = dhuber ( Y ce l l { i } − eY ce l l { i } , . . .
t h r e s h o l d { i } ) ;
d2rho{ i } = d2huber ( Y ce l l { i } − eY ce l l { i } , . . .
t h r e s h o l d { i } ) ;
end
end
drhoVec = c e l l 2 m a t ( drho ’ ) ;
d2rhoVec = c e l l 2 m a t ( d2rho ’ ) ;
A = ze r o s( np , np ) ;
B = ze r o s( np , np ) ;
P s i = c e l l ( nobs , 1 ) ;
d P s i = c e l l ( nobs , 1 ) ;
summ= c e l l ( nobs , 1 ) ;
f o r i =1 : nobs
temp = ( Zmat ( i , : )∗ dcdp ) ’ ;
P s i { i } = −temp .∗ drhoVec ( i ) ;
n b a s i s = s i z e( Zmat , 2 ) ;
summ{ i } = ze r o s( np , np ) ;
f o r k =1 : n b a s i s
summ{ i } = summ{ i }+ squeeze ( d2cdp2 ( k , : , : ) ) . . .
.∗ Zmat ( i , k ) ;
end
d P s i { i } = temp∗temp ’ .∗ d2rhoVec ( i ) − drhoVec ( i ) . . .
.∗summ{ i } ;
A = A+ d P s i { i } ;
B = B+ P s i { i }∗P s i { i } ’ ;
end
VarPars = A\ B / ( A ’ ) ;
outcome =[ t h e t a ; (s q r t ( d i ag( VarPars ) ) ) ’ ] ;
num2st r( outcome )
end

Appendix B: Selection of Matlab code
for Chapter 6
Following is the matlab code of SNHT for normal data; code forother models are quite
similar:
backup = ( 0 : 0 . 1 : 3 ) ’ ;
power=ze r o s( l e n g t h( backup ) , 1 ) ;
t i c
f o r loop =1:l e n g t h( backup ) ;
jump=backup ( loop ) ;
r e p e a t =1000;
r e j e c t =2∗ones ( r ep ea t , 1 ) ;
c r i t i c a l =1 0 .6 9 2 ;
n =1000;
f o r sim =1: r e p e a t ;
% g e n e r a t e d a t a wi th a jump a t t h e midd le t ime p o i n t
t s_ 1 =randn( n / 2 , 1 ) ;
t s_ 2 =jump+randn( n / 2 , 1 ) ;
t s =[ t s_ 1 ; t s_ 2 ] ;
% r e f e r e n c e s e r i e s
r e f _ 1 =randn( n , 1 ) ;
r e f _ 2 =randn( n , 1 ) ;
r e f _ 3 =randn( n , 1 ) ;
r e f _ 4 =randn( n , 1 ) ;
r e f _ 5 =randn( n , 1 ) ;
% c o r r e l a t i o n c o e f f i c i e n t
rho_1= c o r r ( t s , r e f _ 1 ) ;
rho_2= c o r r ( t s , r e f _ 2 ) ;
rho_3= c o r r ( t s , r e f _ 3 ) ;
rho_4= c o r r ( t s , r e f _ 4 ) ;
rho_5= c o r r ( t s , r e f _ 5 ) ;
% Q, Z , T
Q=ze r o s( n , 1 ) ;
f o r i i =1 : n ;
Q( i i )= t s ( i i ) − ( . . .
( rho_1 ^2∗ ( r e f _ 1 ( i i )−mean( r e f _ 1 )+mean( t s ) ) ) + . . .
( rho_2 ^2∗ ( r e f _ 2 ( i i )−mean( r e f _ 2 )+mean( t s ) ) ) + . . .
( rho_3 ^2∗ ( r e f _ 3 ( i i )−mean( r e f _ 3 )+mean( t s ) ) ) + . . .
( rho_4 ^2∗ ( r e f _ 4 ( i i )−mean( r e f _ 4 )+mean( t s ) ) ) + . . .
91

APPENDIX B: SELECTION OF MATLAB CODE FOR CHAPTER 6 92
( rho_5 ^2∗ ( r e f _ 5 ( i i )−mean( r e f _ 5 )+mean( t s ) ) ) . . .
) / ( rho_1 ^2+ rho_2^2+ rho_3^2+ rho_4^2+ rho_5 ^ 2 ) ;
end
Z=(Q−mean(Q ) ) / s t d(Q ) ;
T=ze r o s( n−1 ,1) ;
f o r a =1:l e n g t h(T ) ;
T ( a )= a∗mean(Z ( 1 : a ) ) ^ 2 + ( n−a )∗mean(Z ( ( a +1 ) :end) ) ^ 2 ;
end
% power
max_T=max(T ) ;
i f ( max_T > c r i t i c a l ) && ( ( max_T==T( n /2−1)) | | ( max_T==T( n / 2 ) ) | | ( max_T==T( n / 2 + 1 ) ) ) ;
r e j e c t ( sim ) =1 ;
e l s e
r e j e c t ( sim ) =0 ;
end
end
power ( loop ) = (sum( r e j e c t ) / r e p e a t ) ;
end
t o c
Following is the matlab code of Yao & Davis’ method for normaldata; code for other
models are quite similar:
backup = ( 0 : 0 . 1 : 3 ) ’ ;
powerI =ze r o s( l e n g t h( backup ) , 1 ) ;
power I I =ze r o s( l e n g t h( backup ) , 1 ) ;
c r i t i c a l =3 .2 8 9 8 ;
n =1000;
r e p e a t =1000;
t i c
f o r loop =1:l e n g t h( backup ) ;
jump=backup ( loop ) ;
t y p e I =2∗ones ( r ep ea t , 1 ) ;
t y p e I I =2∗ones ( r ep ea t , 1 ) ;
f o r sim =1: r e p e a t ;
% g e n e r a t e d a t a wi th a jump a t t h e midd le t ime p o i n t
t s_ 1 =randn( n / 2 , 1 ) ;
t s_ 2 =jump+randn( n / 2 , 1 ) ;
Y=[ t s_ 1 ; t s_ 2 ] ;
Tind =ze r o s( n−1 ,1) ;
f o r k =1 : ( n−1) ;
sk=s q r t ( ( ( Y( 1 : k)−mean(Y( 1 : k ) ) ) ’ ∗ (Y( 1 : k)−mean(Y( 1 : k ) ) ) + . . .
(Y( ( k +1 ) : n)−mean(Y( ( k +1 ) : n ) ) ) ’ ∗ (Y( ( k +1 ) : n)−mean(Y( ( k +1 ) : n ) ) ) ) / ( n−2) ) ;
Tind ( k )= abs( ( 1 / sk )∗ s q r t ( n / ( k∗(n−k ) ) )∗sum(Y( 1 : k)−mean(Y ) ) ) ;
end
T=max( Tind ) ;
i f (T > c r i t i c a l ) && ( ( T==Tind ( n /2−1)) | | (T==Tind ( n / 2 ) ) | | (T==Tind ( n / 2 + 1 ) ) ) ;
t y p e I ( sim ) =1 ;
e l s e
t y p e I ( sim ) =0 ;
end

APPENDIX B: SELECTION OF MATLAB CODE FOR CHAPTER 6 93
i f (T > c r i t i c a l ) && ( ( T~=Tind ( n /2−1)) && (T~=Tind ( n / 2 ) ) && (T~=Tind ( n / 2 + 1 ) ) ) ;
t y p e I I ( sim ) =1 ;
e l s e
t y p e I I ( sim ) =0 ;
end
end
powerI ( loop ) = (sum( t y p e I ) / r e p e a t ) ;
power I I ( loop ) = (sum( t y p e I I ) / r e p e a t ) ;
end
t o c

Appendix C: Selection of Winbugs code
for Chapter 11
Following is selection of Winbugs code for MCMC:
model
{
f o r ( i i n 1 : I ) {
f o r ( j i n 1 : J ) {
Y[ i , j ]~ dnorm ( f [ i , j ] , 1 0 0 0 0 0 0 )
f [ i , j ]< − l o g ( ( 1 / k [ j ] ) ∗ (pow ( k [ j ]∗ ( exp(B[ i , j ] ) + 1 ) / exp(A[ i , j ] ) , 1 / ( exp(B[ i , j ] ) + 1 ) ) + t au 0 ) )
A[ i , j ] ~ dnorm (A. c , t au .A)
B[ i , j ] ~ dnorm (B . c , t au .B)
}
}
A. c ~ dnorm ( 0 , 1 . 0 E−6)
B . c ~ dnorm ( 0 , 1 . 0 E−6)
sigma .A ~ d u n i f ( 0 ,1 0 0 )
sigma .B ~ d u n i f ( 0 ,1 0 0 )
t au .A <− 1 / ( sigma .A∗sigma .A)
t au .B <− 1 / ( sigma . B∗sigma . B)
}
94

Bibliography
[1] Zhang, W., 2005. Differential Equations, Bifucations,and Chaos in Economics.
World Scientific Publishing Company.
[2] Okesndal, B., 2003. Stochastic Differential Equations: An Introduction with Appli-
cations, 6th edition. Springer.
[3] Jones, D.S. and B.D.Sleeman, 2003. Differential Equations and Mathematical Biol-
ogy. Chapman & Hall.
[4] Ramsay, J. O. and B. W. Silverman, 2005. Functional Data Analysis, 2ed edition.
New York: Springer.
[5] Maronna, R.A., D.R.Martin, and V.J.Yohai, 2006. RobustStatistics: Theory and
Methods. Wiley.
[6] Fussmann, G. F., S. P. Ellner, K. W. Shertzer, and N. G. Hairston Jr., 2000. Crossing
the hopf bifurcation in a live predator-prey system.Science290, 1358-1360.
[7] Shertzer, K. W., S. P. Ellner, G. F. Fussmann, and N. G. Hairston Jr., 2002. Predator-
prey cycles in an aquatic microcosm: testing hypotheses of 30 mechanism.Journal
Of Animal Ecology71, 802-815.
[8] Yoshida, T., L. E. Jones, S. P. Ellner, G. F. Fussmann, andN. G. Hairston Jr., 2003.
Rapid evolution drives ecological dynamics in a predator-prey system.Nature424,
303-306.
[9] Cao, J., G. Fussmann, and J. O. Ramsay, 2008. Estimating apredator-prey dynamical
model with the parameter cascades method.Biometrics64, 959-967.
95

BIBLIOGRAPHY 96
[10] de Boor, C., 2001. A Practical Guide to Splines. RevisedEdition. New York: Springer.
[11] Andersen, R., 2008. Modern Methods For Robust Regression. SAGE Publications.
[12] Fox, J., 2008. Applied Regression Analysis and Generalized Linear Models, 2nd edi-
tion. SAGE Publications.
[13] Carroll, R. J., D. Ruppert, L. A. Stefanski, and C. M. Crainiceanu, 2006. Measurement
Error in Nonlinear Models A Modern Perspective. Second Edition. Monographs on
Statistics and Applied Probability 105. Chapman & Hall/CRC.
[14] Kauermann, G. and R. J. Carroll, 2001. The Sandwich variance estimator: Efficiency
properties and coverage probability of confidence intervals.Journal of the American
Statistical Association, 96, 1387-1396.
[15] Lomen, D. and D. Lovelock, 1996. Exploring differential equations via graphics and
data. New York: Wiley.
[16] FitzHugh, R, 1961. Impulses and physiological states in models of nerve membrane.
Biophysical Journal1, 445-466.
[17] Nagumo, J. S., S. Arimoto, and S. Yoshizawa, 1962. An active pulse transmission line
simulating a nerve axon.Proceedings of the IRE50, 2061-2070.
[18] Alexandersson, H. and A. Moberg, 1997. Homogenizationof Swedish temperature
data. Part I: Homogeneity test for linear trends.International Journal of Climatology
17:25-34.
[19] Khaliq, M. N. and T.B.M.J.Ouarda, 2007. On the criticalvalues of the standard normal
homogeneity test (SNHT).International Journal of Climatology27:681-687.
[20] Yao, Y. C. and R. A. Davis, 1984. The asymptotic behaviorof the likelihood ratio
statistic for testing a shift in mean in a sequence of independent normal variates.
Sankhya48: 339 - 353.
[21] Lindgren, B. W., 1968. Statistical Theory, 2nd edn. Macmillan, London, 521 pp.

BIBLIOGRAPHY 97
[22] Jaruskova, D. and M. Rencova, 2007. Analysis of annual maximal and minimal tem-
peratures for some European cities by change point methods.Environmetrics, Volume
19 Issue 3, Pages 221 - 233.
[23] Shumway, R. H. and D. S. Stoffer. 2005. Time Series Analysis and Its Applications
With R Examples, Second Edition. Springer.
[24] Hoffmeyer, P., 1990. Failure of Wood as Influenced by Moisture and Duration of
Load. PhD Thesis, College of Environmental Science and Forestry Syracuse, State
University of New York.
[25] Foschi, R. O. and J. D. Barrett, 1982. Load-Duration Effects in Western Hemlock
Lumber.Journal of the Structural Division, Vol. 108, No. 7, July 1982, pp. 1494-
1510.
[26] Kohler, J. and S. Svensson, 2002. Presented at the 35. CIB W18 Meeting in Kyoto,
September 2002.
[27] Foschi, R.O. and Z. C. Yao, 1986. Duration of Load Effects And Reliability Based
Design. IUFRO Wood Engineering Group Meeting, Sept. 1-6, 1986, Firenze, Italy.
[28] Gelman, A., J. B. Carlin, H.S. Stern and D. B. Rubin, 2003. Bayesian Data Analysis,
Second Edition. Chapman & Hall.
[29] Cai, Z., D.V. Rosowsky, M.O. Hunt and K.J. Fridley, 2000. Comparison of Actual vs.
Simulated Failure Distributions of Flexural Wood Specimens Subject to 5-day Load
Sequences.Wood Engineering, January 2000.























