Embed Size (px)
Citation preview
1
ELG41257: Robust Control Systems
Feedback control systems are widely used in manufacturing, mining, automobile and other hardware applications. In
response to increased demands for increased efficiency and reliability, these control systems are being required to deliver more accurate and better overall performance in the face of
difficult and changing operating conditions.
In order to design control systems to meet the needs of improved performance and robustness when controlling
complicated processes, control engineers will require new design tools and better control theory. A standard technique of improving the performance of a control system is to add extra sensors and actuators. This necessarily leads to a multi-input
multi-output (MIMO) control system. Accordingly, it is a requirement for any modern feedback control system design
methodology that it be able to handle the case of multiple actuators and sensors.
Robust means durable, hardy, and resilient
2
Why Robust?
• When we design a control system, our ultimate goal is to control a
particular system in a real environment.
• When we design the control system we make numerous
assumptions about the system and then we describe the system with
some sort of mathematical model.
• Using a mathematical model permits us to make predictions about
how the system will behave, and we can use any number of
simulation tools and analytical techniques to make those predictions.
• Any model incorporates two important problems that are often
encountered: a disturbance signal is added to the control input to
the plant. That can account for wind gusts in airplanes, changes in
ambient temperature in ovens, etc., and noise that is added to the
sensor output.
3
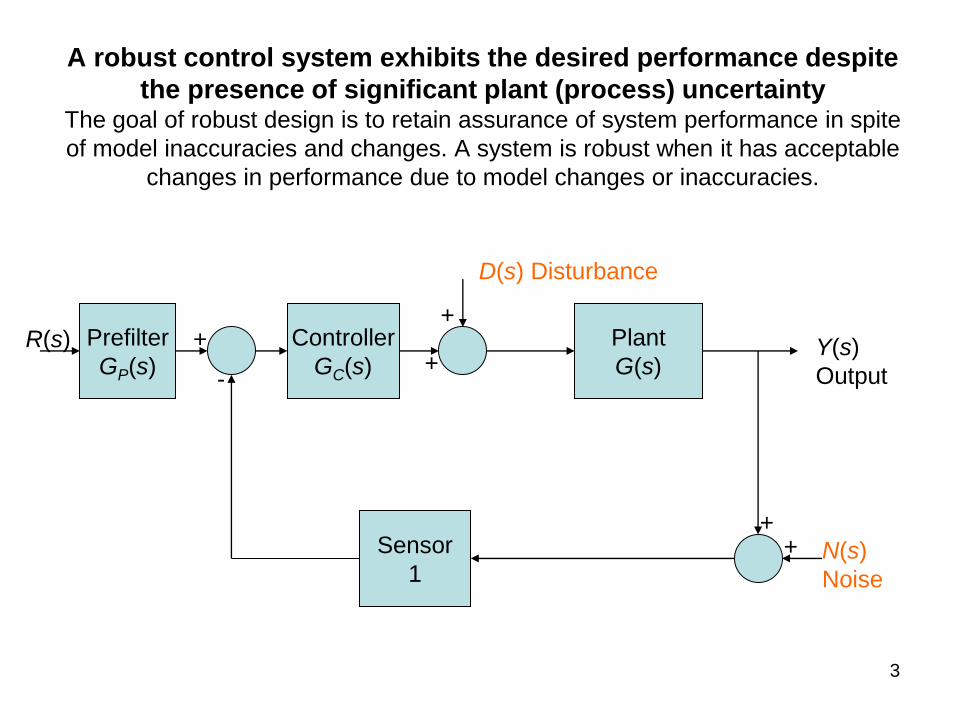
A robust control system exhibits the desired performance despite
the presence of significant plant (process) uncertainty The goal of robust design is to retain assurance of system performance in spite
of model inaccuracies and changes. A system is robust when it has acceptable
changes in performance due to model changes or inaccuracies.
D(s) Disturbance
R(s) Prefilter
GP(s)
Controller
GC(s)
Plant
G(s)
Sensor
1
+
-
+
+
+ +
Y(s)
Output
N(s)
Noise
4
Why Feedback Control Systems?
• Decrease in the sensitivity of the system to variation in
the parameters of the process G(s).
• Ease of control and adjustment of the transient
response of the system.
• Improvement in the rejection of the disturbance and
noise signals within the system.
• Improvement in the reduction of the steady-state error
of the system
5
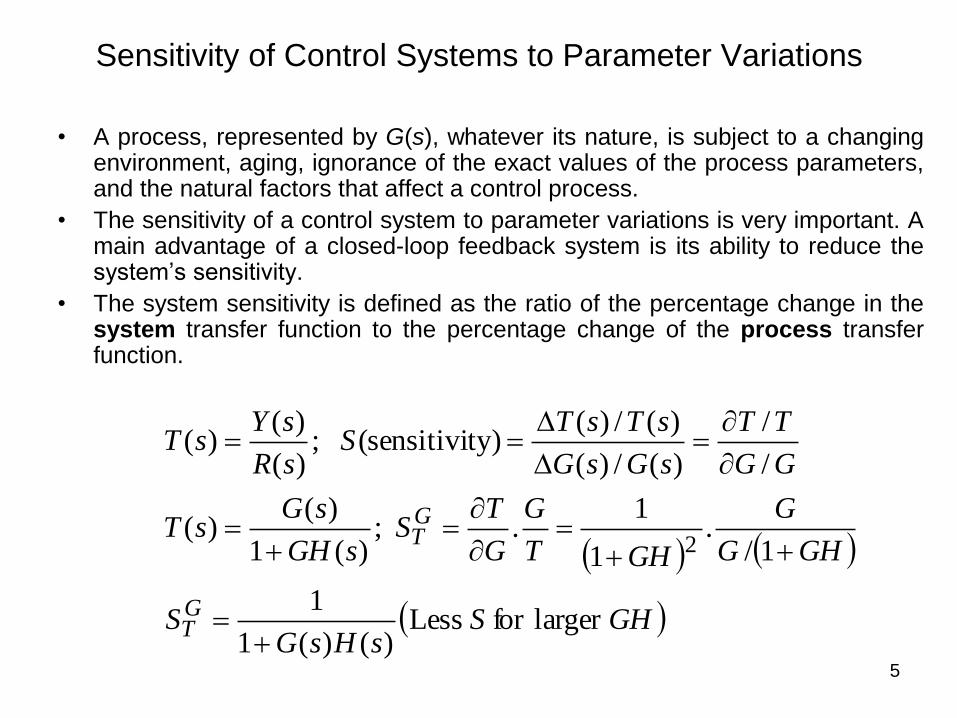
Sensitivity of Control Systems to Parameter Variations
• A process, represented by G(s), whatever its nature, is subject to a changing environment, aging, ignorance of the exact values of the process parameters, and the natural factors that affect a control process.
• The sensitivity of a control system to parameter variations is very important. A main advantage of a closed-loop feedback system is its ability to reduce the system’s sensitivity.
• The system sensitivity is defined as the ratio of the percentage change in the system transfer function to the percentage change of the process transfer function.
GHSsHsG
S
GHG
G
GHT
G
G
TS
sGH
sGsT
GG
TT
sGsG
sTsTS
sR
sYsT
GT
GT
larger for Less)()(1
1
1/.
1
1. ;
)(1
)()(
/
/
)(/)(
)(/)(ty)(sensitivi ;
)(
)()(
2
6
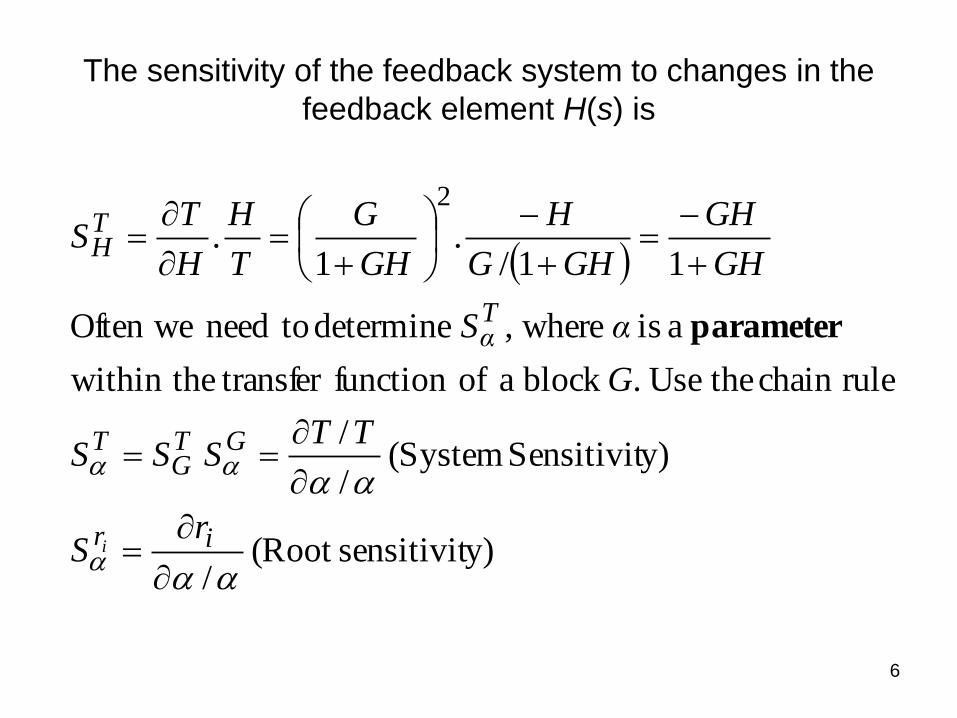
The sensitivity of the feedback system to changes in the
feedback element H(s) is
y)sensitivit(Root /
y)Sensitivit (System /
/
rulechain the Use.block a offunction transfer within the
a is where, determine toneed Often we
11/.
1.
2
ir
GTG
T
Tα
TH
rS
TTSSS
G
αS
GH
GH
GHG
H
GH
G
T
H
H
TS
i
parameter
7
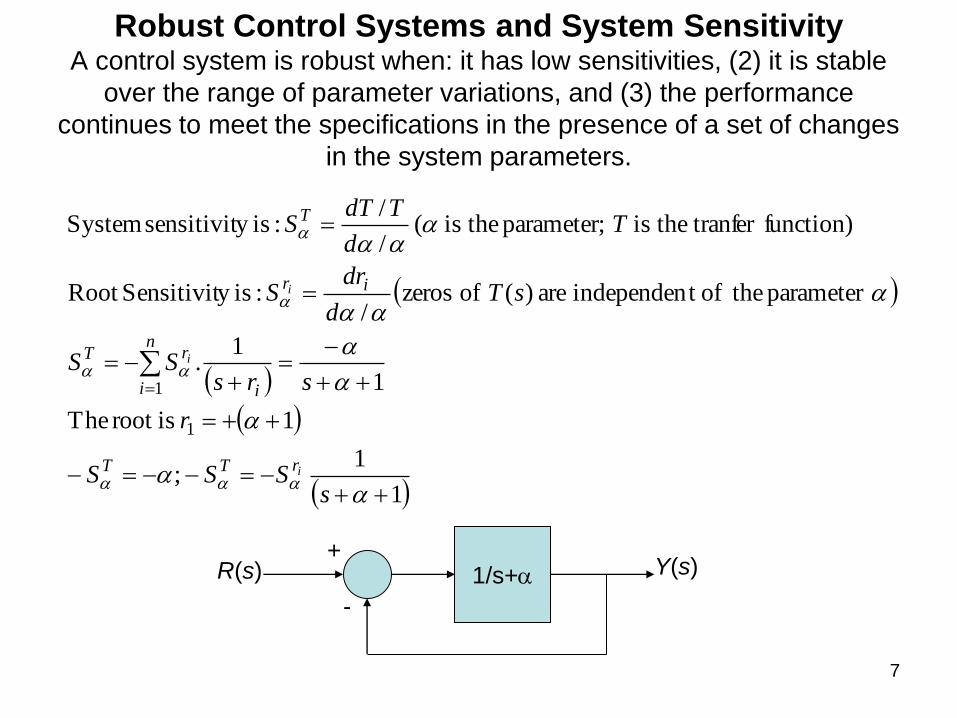
Robust Control Systems and System Sensitivity A control system is robust when: it has low sensitivities, (2) it is stable
over the range of parameter variations, and (3) the performance
continues to meet the specifications in the presence of a set of changes
in the system parameters.
1
1 ;
1 isroot The
1
1.
parameter theoft independen are )( of zeros/
:isy SensitivitRoot
function) tranfer theis parameter; theis ( /
/ :isy sensitivit System
1
1
sSSS
r
srsSS
sTd
drS
Td
TdTS
i
i
i
rTT
i
n
i
rT
ir
T
1/s+ +
-
R(s) Y(s)
8
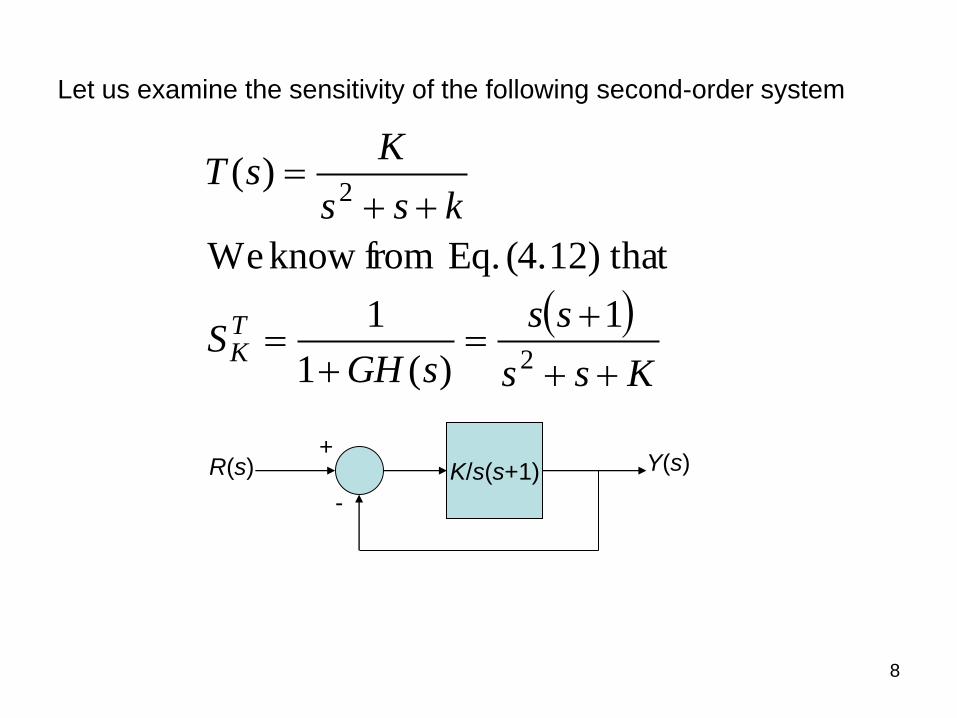
Let us examine the sensitivity of the following second-order system
Kss
ss
sGHS
kss
KsT
TK
2
2
1
)(1
1
that(4.12) Eq. from know We
)(
K/s(s+1) +
-
R(s) Y(s)
9
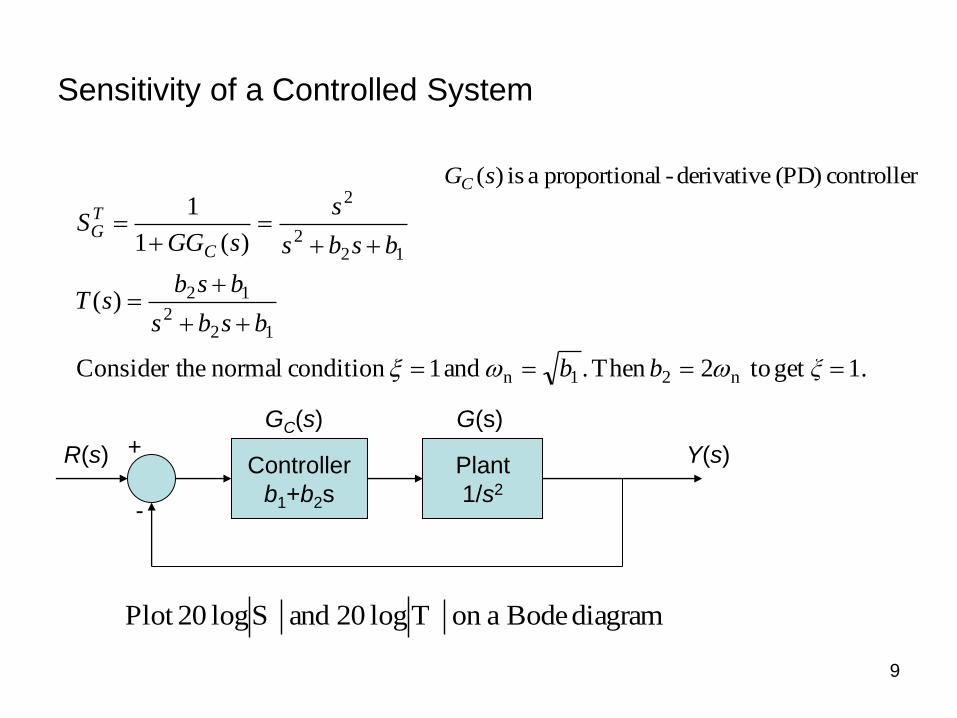
Sensitivity of a Controlled System
1.get to2Then . and 1condition normal heConsider t
)(
)(1
1
n21n
122
12
122
2
ξbb
bsbs
bsbsT
bsbs
s
sGGS
C
TG
diagram Bode aon Tlog 20 and Slog 20Plot
Controller
b1+b2s
Plant
1/s2
R(s) +
-
Y(s)
G(s) GC(s)
controller (PD) derivative-alproportion a is )(sGC
10
Disturbance Signals in a Feedback Control System
• Another important effect of feedback in a control system is the control
and partial elimination of the effect of disturbance signal.
• A disturbance signal is an unwanted input signal that affects the
system output signal. Electronic amplifiers have inherent noise
generated within the integrated circuits or transistors; radar systems
are subjected to wind gusts; and many systems generate all kinds of
unwanted signals due to nonlinear elements.
• Feedback systems have the beneficial aspects that the effect of
distortion, noise, and unwanted disturbances can be effectively
reduced.
11
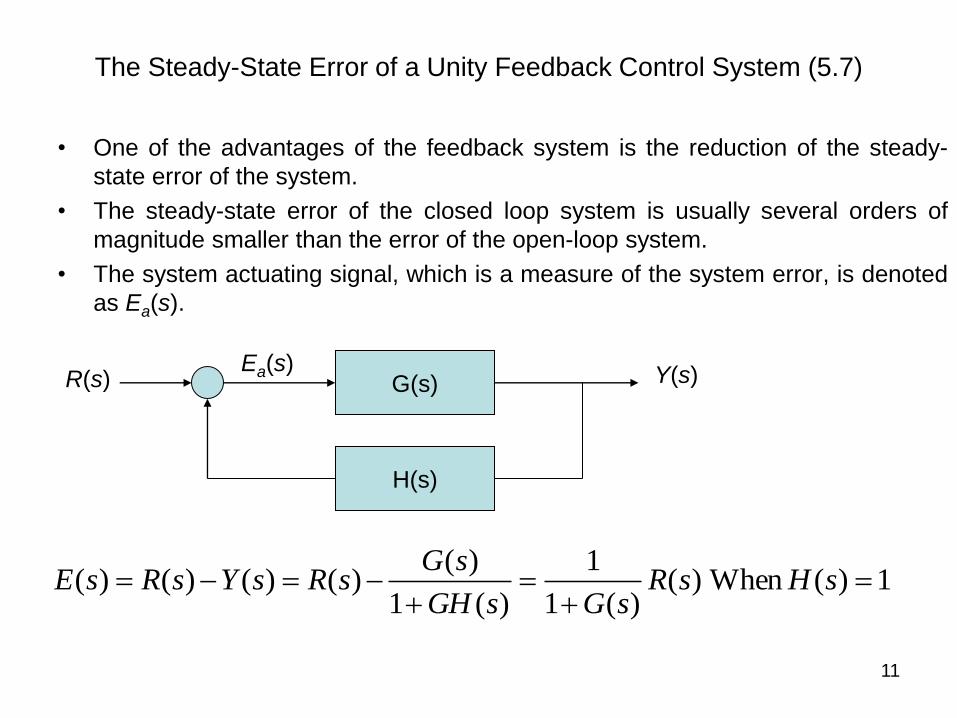
The Steady-State Error of a Unity Feedback Control System (5.7)
• One of the advantages of the feedback system is the reduction of the steady-
state error of the system.
• The steady-state error of the closed loop system is usually several orders of
magnitude smaller than the error of the open-loop system.
• The system actuating signal, which is a measure of the system error, is denoted
as Ea(s).
G(s)
H(s)
Y(s) R(s) Ea(s)
1)( When )()(1
1
)(1
)()()()()(
sHsR
sGsGH
sGsRsYsRsE
12
Compensator • A feedback control system that provides an optimum performance
without any necessary adjustments is rare. Usually it is important to compromise among the many conflicting and demanding specifications and to adjust the system parameters to provide suitable and acceptable performance when it is not possible to obtain all the desired specifications.
• The alteration or adjustments of a control system in order to provide a suitable performance is called compensation.
• A compensator is an additional component or circuit that is inserted into control system to compensate for a deficient performance.
• The transfer function of a compensator is designated as GC(s) and the compensator may be placed in a suitable location within the structure of the system.
13
Root Locus Method
• The root locus is a powerful tool for designing and analyzing
feedback control systems.
• It is possible to use root locus methods for design when two or three
parameters vary. This provides us with the opportunity to design
feedback systems with two or three adjustable parameters. For
example the PID controller has three adjustable parameters.
• The root locus is the path of the roots of the characteristic equation
traced out in the s-plane as a system parameter is changed.
• Read Table 7.2 to understand steps of the root locus procedure.
• The design by the root locus method is based on reshaping the root
locus of the system by adding poles and zeros to the system open
loop transfer function and forcing the root loci to pass through
desired closed-loop poles in the s-plane.
14
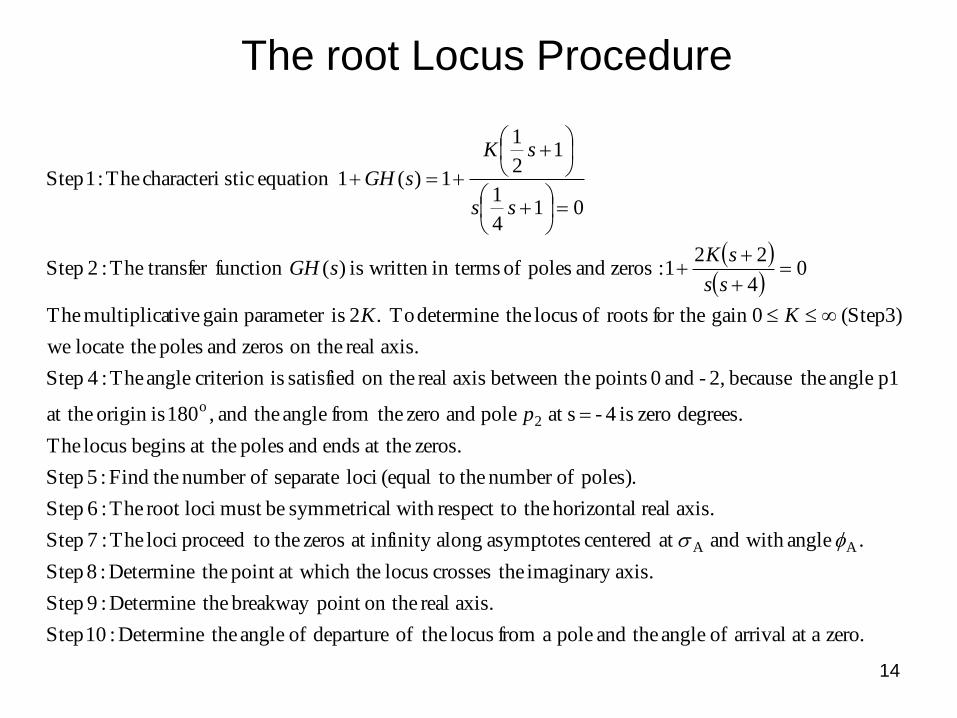
The root Locus Procedure
zero. aat arrival of angle theand pole a from locus theof departure of angle theDetermine :10 Step
axis. real on thepoint breakway theDetermine :9 Step
axis.imaginary thecrosses locus heat which tpoint theDetermine :8 Step
. angle with and at centered asymptotes alonginfinity at zeros the toproceed loci The :7 Step
axis. real horizontal therespect to with lsymmetrica bemust lociroot The :6 Step
poles). ofnumber the to(equal loci separate ofnumber theFind :5 Step
zeros. at the ends and poles at the begins locus The
degrees. zero is 4- sat pole and zero thefrom angle theand ,180 isorigin at the
p1 angle thebecause 2,- and 0 points ebetween th axis real on the satisfied iscriterion angle The :4 Step
axis. real on the zeros and poles thelocate we
(Step3) 0gain for the roots of locus thedetermine To .2 isparameter gain tivemultiplica The
04
221 :zeros and poles of in terms written is )(function transfer The :2 Step
014
1
12
1
1)(1equation sticcharacteri The :1 Step
AA
2o
p
KK
ss
sKsGH
ss
sK
sGH
15
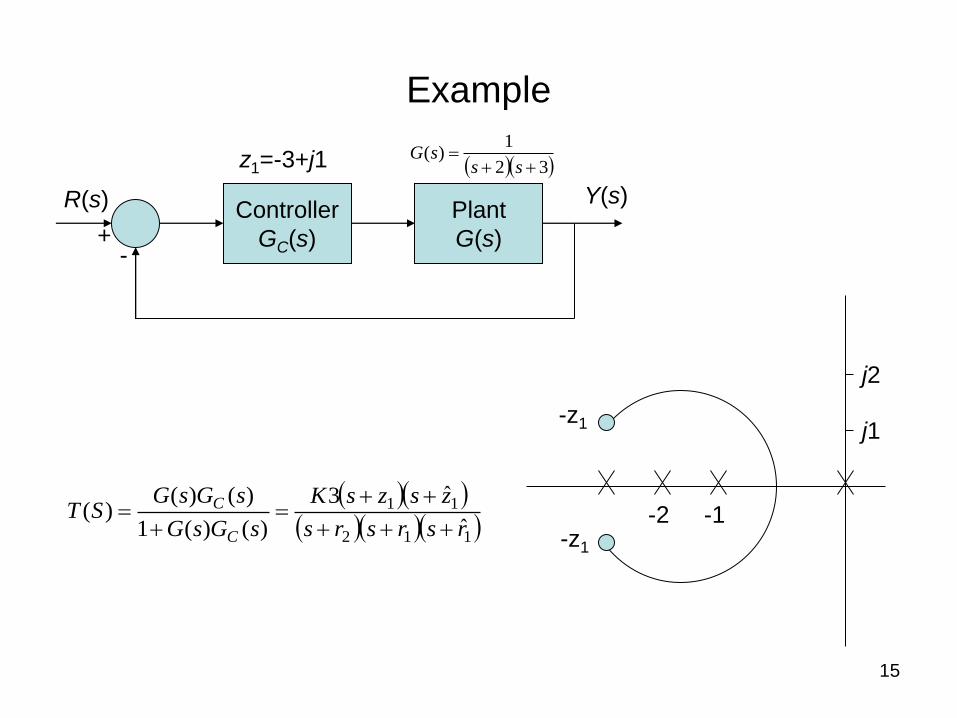
Example
32
1)(
sssG
Controller
GC(s)
Plant
G(s)
R(s) Y(s)
- +
z1=-3+j1
-1 -2
-z1
-z1
112
11
ˆ
ˆ3
)()(1
)()()(
rsrsrs
zszsK
sGsG
sGsGST
C
C
j1
j2
16
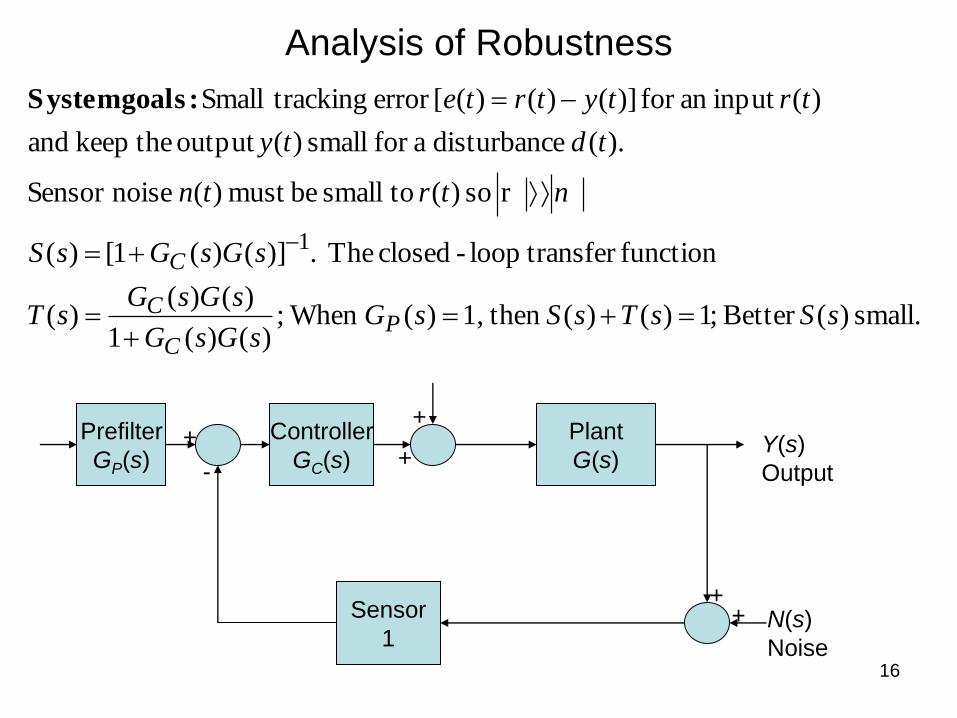
Analysis of Robustness
Prefilter
GP(s)
Controller
GC(s)
Plant
G(s)
Sensor
1
+
-
+
+
+ +
Y(s)
Output
N(s)
Noise
small. )(Better ;1)()( then 1,)( When ;)()(1
)()()(
function transfer loop-closed The .)]()(1[)(
r so )( tosmall bemust )( noiseSensor
).( edisturbanc afor small )(output thekeep and
)(input an for )]()()([error trackingSmall
1
sSsTsSsGsGsG
sGsGsT
sGsGsS
ntrtn
tdty
trtytrte
PC
C
C
:goals System
17
The Design of Robust Control Systems
• The design of robust control systems is based on two tasks: determining the structure of the controller and adjusting the controller’s parameters to give an optimal system performance. This design process is done with complete knowledge of the plant. The structure of the controller is chosen such that the system’s response can meet certain performance criteria.
• One possible objective in the design of a control system is that the controlled system’s output should exactly reproduce its input. That is the system’s transfer function should be unity. It means the system should be presentable on a Bode gain versus frequency diagram with a 0-dB gain of infinite bandwidth and zero phase shift. Practically, this is not possible!
• Setting the design of robust system requires us to find a proper compensator, GC(s) such that the closed-loop sensitivity is less than some tolerance value.
18
PID Controllers PID stands for Proportional, Integral, Derivative. One form of controller
widely used in industrial process is called a three term, or PID controller.
This controller has a transfer function:
A proportional controller (Kp) will have the effect of reducing the rise time
and will reduce, but never eliminate, the steady state error. An integral
control (KI) will have the effect of eliminating the steady-state error, but it
may make the transient response worse. A derivative control (KD) will
have the effect of increasing the stability of the system, reducing the
overshoot, and improving the transient response.
dt
tdeKdtteKteKtu
sKs
KKtG
DIp
DI
pC
)()()()(
termderivative a and n term,integratioan term,alproportion a provides controller The
)(
19
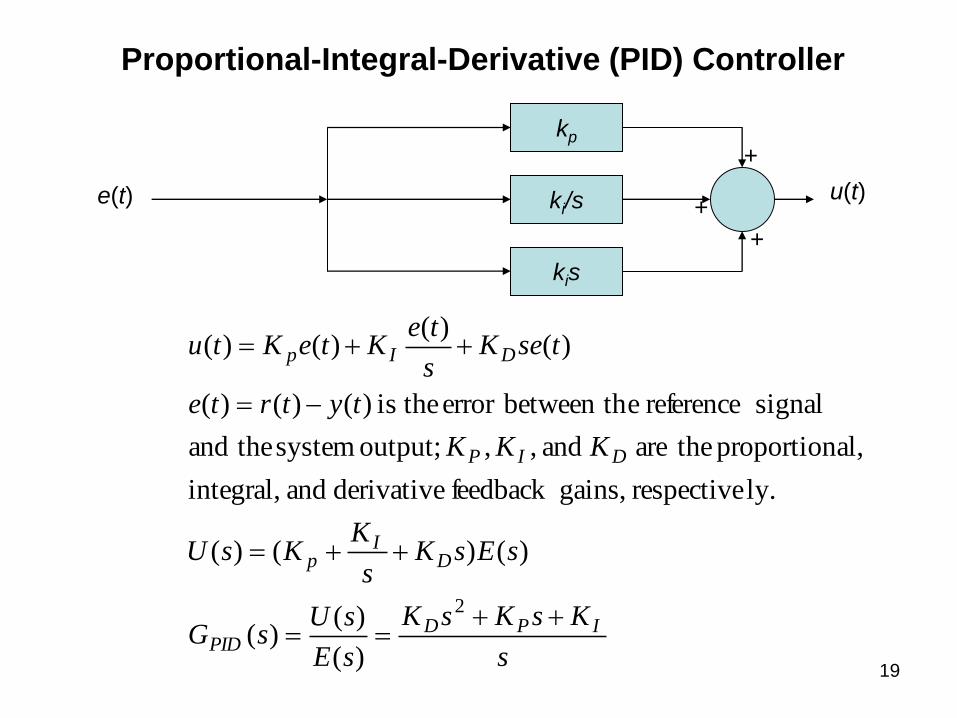
Proportional-Integral-Derivative (PID) Controller
kp
ki/s
kis
+
+
+
e(t) u(t)
s
KsKsK
sE
sUsG
sEsKs
KKsU
KKK
tytrte
tseKs
teKteKtu
IPDPID
DI
p
DIP
DIp
2
)(
)()(
)()()(
ly.respective gains,feedback derivative and integral,
al,proportion theare and ,, output; system theand
signal reference ebetween therror theis )()()(
)()(
)()(
20
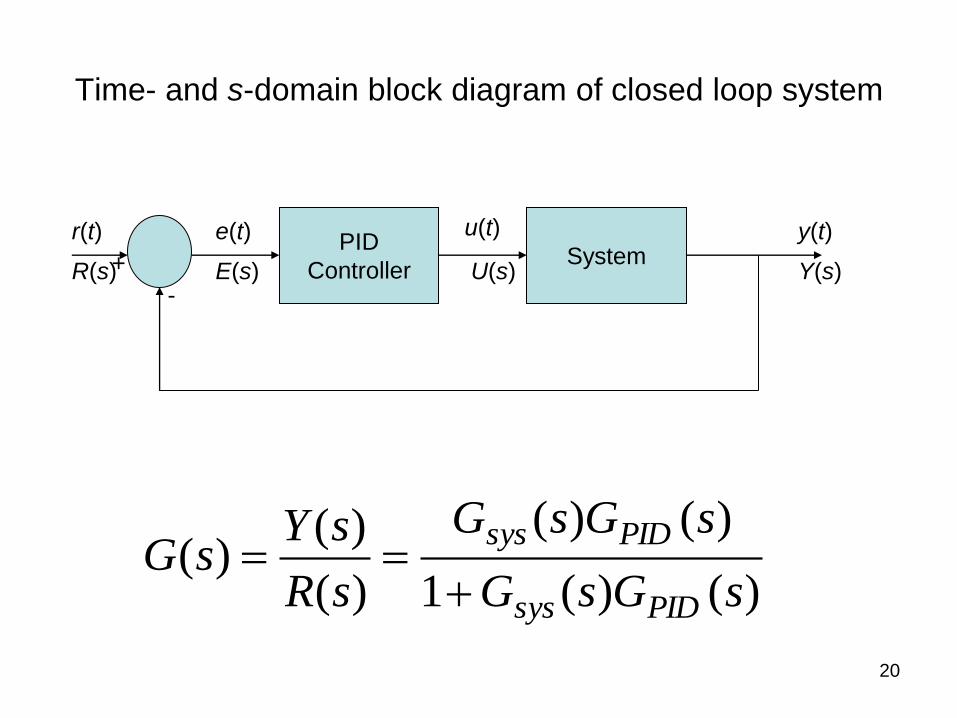
Time- and s-domain block diagram of closed loop system
PID
Controller System
r(t) e(t) u(t)
-
+ R(s) E(s) U(s)
y(t)
Y(s)
)()(1
)()(
)(
)()(
sGsG
sGsG
sR
sYsG
PIDsys
PIDsys
21
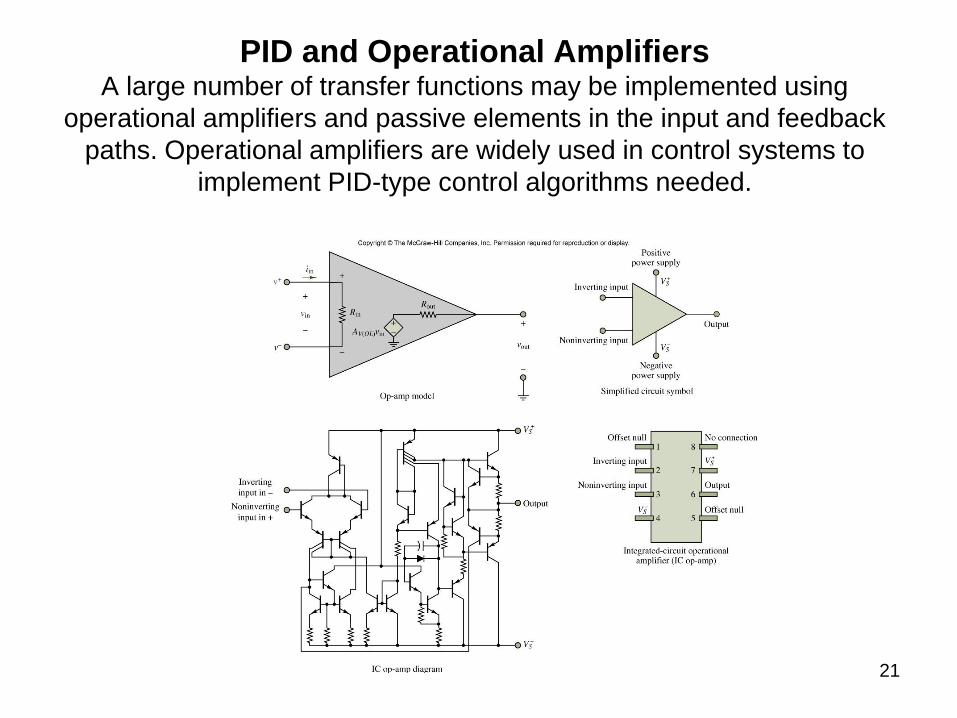
PID and Operational Amplifiers A large number of transfer functions may be implemented using
operational amplifiers and passive elements in the input and feedback
paths. Operational amplifiers are widely used in control systems to
implement PID-type control algorithms needed.
22
Figur
e 8.5
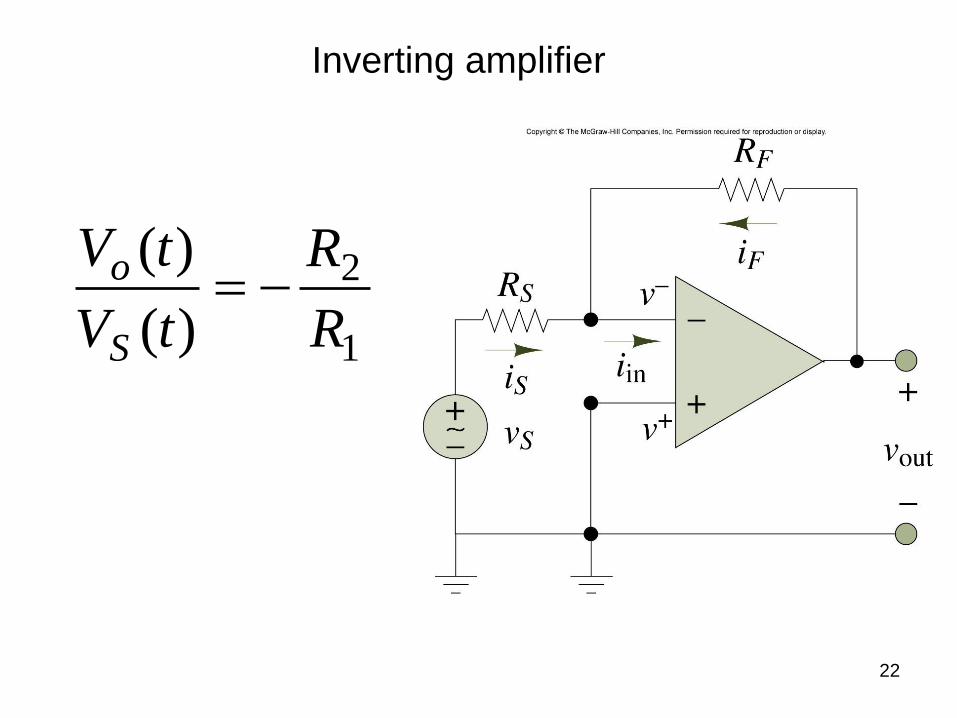
Inverting amplifier
1
2
)(
)(
R
R
tV
tV
S
o
23
Figure
8.30
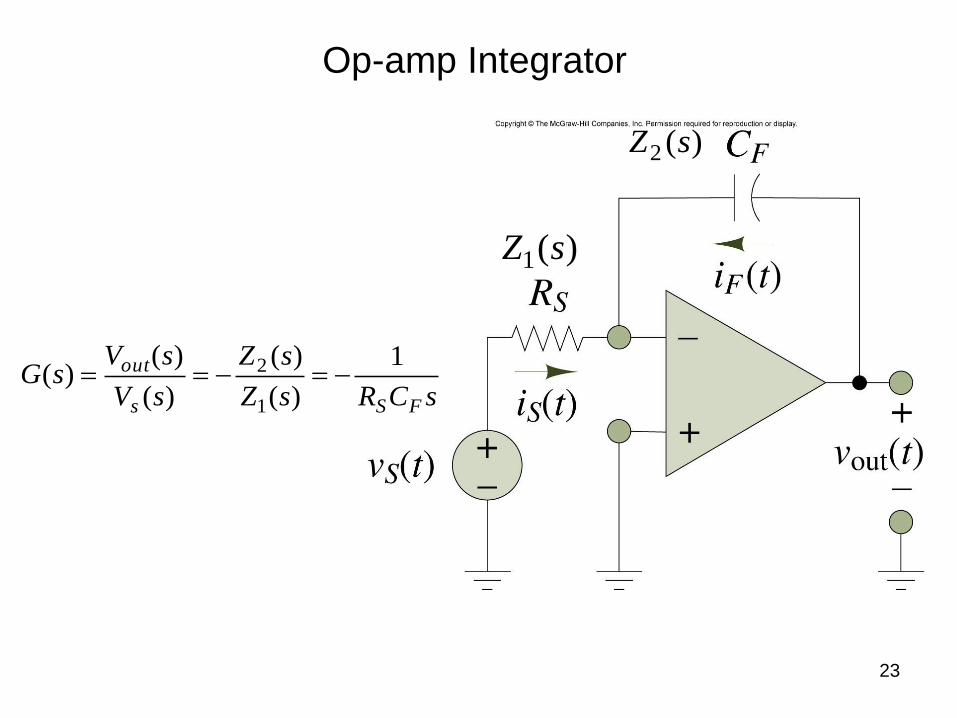
Op-amp Integrator
sCRsZ
sZ
sV
sVsG
FSs
out 1
)(
)(
)(
)()(
1
2
)(1 sZ
)(2 sZ
24
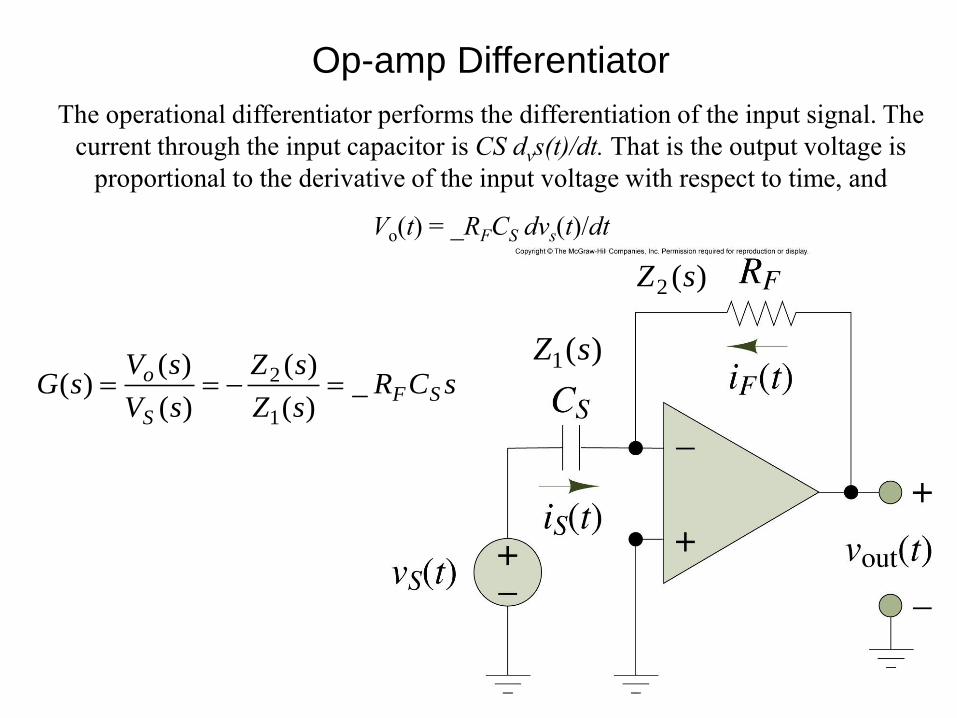
Figure 8.35
Op-amp Differentiator
The operational differentiator performs the differentiation of the input signal. The
current through the input capacitor is CS dvs(t)/dt. That is the output voltage is
proportional to the derivative of the input voltage with respect to time, and
Vo(t) = _RFCS dvs(t)/dt
sCRsZ
sZ
sV
sVsG SF
S
o _)(
)(
)(
)()(
1
2
)(2 sZ
)(1 sZ
25
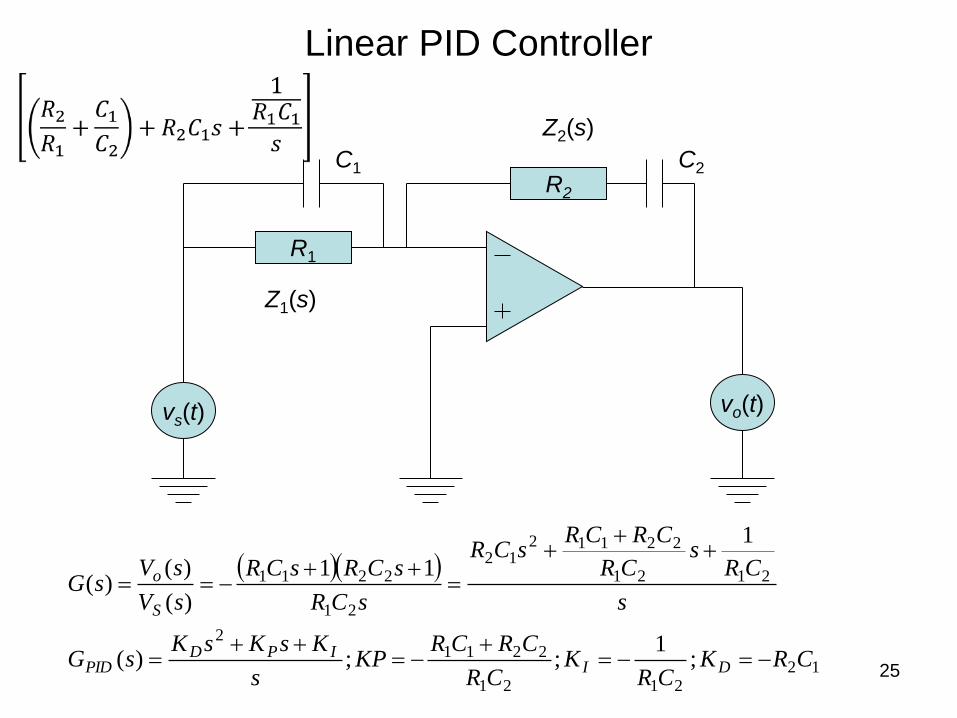
Linear PID Controller
vo(t)
R1
R2
vs(t)
C1 C2
Z2(s)
Z1(s)
122121
22112
2121
2211212
21
2211
;1
;;)(
1
11
)(
)()(
CRKCR
KCR
CRCRKP
s
KsKsKsG
s
CRs
CR
CRCRsCR
sCR
sCRsCR
sV
sVsG
DIIPD
PID
S
o
26
Tips for Designing a PID Controller When you are designing a PID controller for a given system, follow the
following steps in order to obtain a desired response.
• Obtain an open-loop response and determine what needs to be improved
• Add a proportional control to improve the rise time
• Add a derivative control to improve the overshoot
• Add an integral control to eliminate the steady-state error
• Adjust each of Kp, KI, and KD until you obtain a desired overall response.
• It is not necessary to implement all three controllers (proportional, derivative, and integral) into a single system, if not needed. For example, if a PI controller gives a good enough response, then you do not need to implement derivative controller to the system.
27
The popularity of PID controllers may be attributed partly to their robust
performance in a wide range of operation conditions and partly to their
functional simplicity, which allows engineers to operate them in a simple
manner.
plane- hand-left in the anywhere located
becan that zeros twoandorigin at the pole oneith function w transfer a
introduces PID y theAccordingl ./ and ;/ Where
)(
3231
2132
3
212
33
21
s
KKbKKa
s
zszsK
s
bassK
s
KsKsKsK
s
KKtGC
28
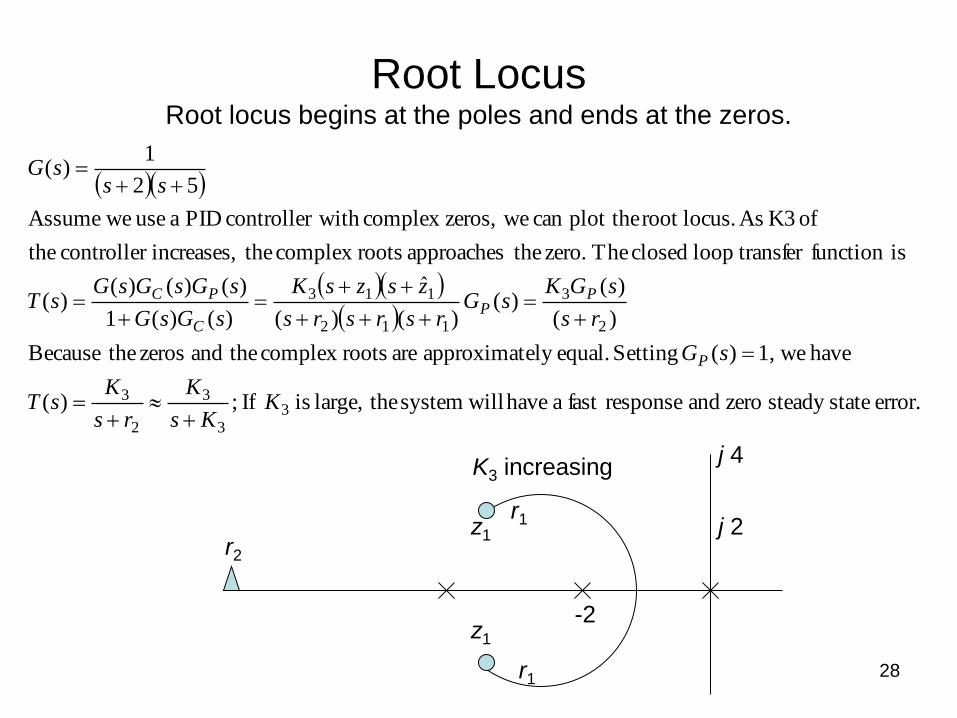
Root Locus Root locus begins at the poles and ends at the zeros.
error. statesteady zero and responsefast a have willsystem thelarge, is If ;)(
have we1,)( Setting equal.ely approximat are rootscomplex theand zeros theBecause
)(
)()(
)()(
ˆ
)()(1
)()()()(
isfunction transfer loop closed The zero. theapproaches rootscomplex theincreases, controller the
of K3 As locus.root plot thecan wezeros,complex with controller PID a use weAssume
52
1)(
33
3
2
3
2
3
112
113
KKs
K
rs
KsT
sG
rs
sGKsG
rsrsrs
zszsK
sGsG
sGsGsGsT
sssG
P
PP
C
PC
-2
r2
j 2
j 4 K3 increasing
z1
z1
r1
r1
29
Design of Robust PID-Controlled Systems The selection of the three coefficients of PID controllers is basically a search
problem in a three-dimensional space. Points in the search space correspond to
different selections of a PID controller’s three parameters. By choosing different
points of the parameter space, we can produce different step responses for a
step input.
The first design method uses the (integral of time multiplied by absolute error
(ITAE) performance index in Section 5.9 and the optimum coefficients of Table
5.6 for a step input or Table 5.7 for a ramp input. Hence we select the three PID
coefficients to minimize the ITAE performance index, which produces an
excellent transient response to a step (see Figure 5.30c). The design
procedure consists of the following three steps.
dttet
T
0
)(ITAE
30
The Three Design Steps of Robust PID-Controlled System
• Step 1: Select the n of the closed-loop system by specifying the settling
time.
• Step 2: Determine the three coefficients using the appropriate optimum
equation (Table 5.6) and the n of step 1 to obtain GC(s).
• Step 3: Determine a prefilter GP(s) so that the closed-loop system transfer
function, T(s), does not have any zero, as required by Eq. (5.47)
on
nn
o
bsbsbs
b
sR
sYsT
1
11 ...)(
)()(
31
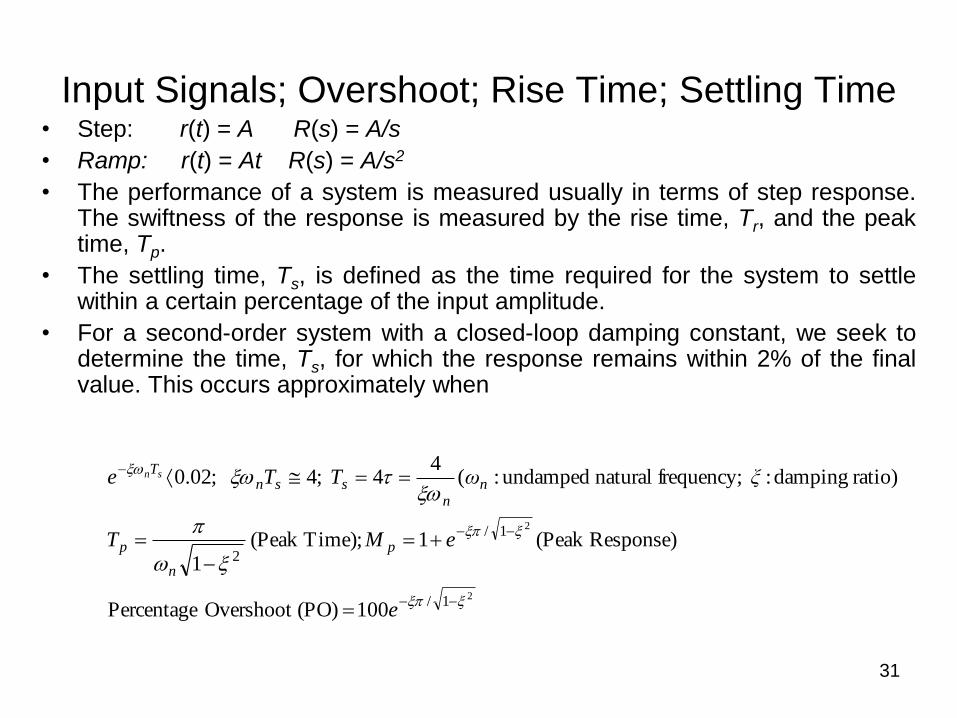
Input Signals; Overshoot; Rise Time; Settling Time • Step: r(t) = A R(s) = A/s
• Ramp: r(t) = At R(s) = A/s2
• The performance of a system is measured usually in terms of step response. The swiftness of the response is measured by the rise time, Tr, and the peak time, Tp.
• The settling time, Ts, is defined as the time required for the system to settle within a certain percentage of the input amplitude.
• For a second-order system with a closed-loop damping constant, we seek to determine the time, Ts, for which the response remains within 2% of the final value. This occurs approximately when
2
2
1/
1/
2
100 (PO)Overshoot Percentage
Response)(Peak 1 Time);(Peak 1
ratio) damping : frequency; natural undamped :(4
4 ;4 ;02.0
e
eMT
ξωTTe
p
n
p
nn
ssnTsn
Effects of Poles and Zeros
• The response of a dominantly second order system is
sped up by an additional zero and is slowed down by an
additional pole.
• In the dominantly second-order system the added closed
loop zero also has the important effect of increasing the
amount of oscillation in the system while an added
closed loop pole has the effect of decreasing the amount
of oscillation.
• Added forward path zeros and added forward path poles
have an opposite effect on the overshoot.
• A forward path pole which is too close to the origin may
turn the closed loop system unstable.
32
33
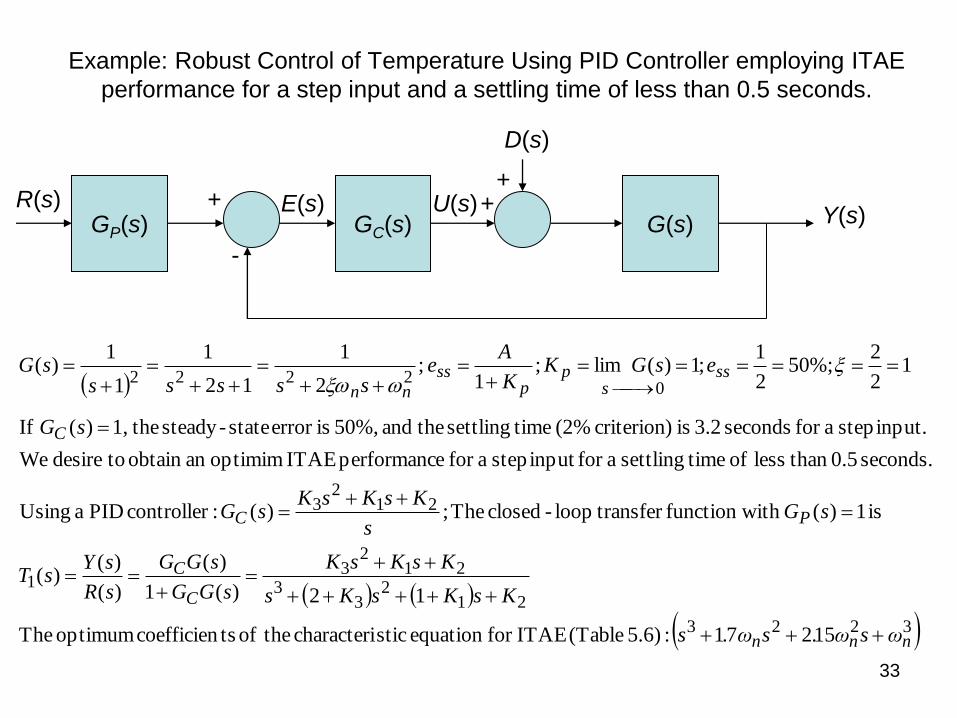
Example: Robust Control of Temperature Using PID Controller employing ITAE
performance for a step input and a settling time of less than 0.5 seconds.
3223
212
33
212
31
212
3
02222
15271 :5.6) (Table ITAEfor equation sticcharacteri theof tscoefficien optimum The
12)(1
)(
)(
)()(
is 1)(ith function w transfer loop-closed The;)( :controller PID a Using
seconds. 0.5 than less of timesettling afor input step afor eperformanc ITAE optimiman obtain todesire We
input. step afor seconds 3.2 is criterion) (2% timesettling theand 50%, iserror state-steady the1,)( If
12
2%;50
2
1;1)( lim;
1 ;
2
1
12
1
1
1)(
nnn
C
C
PC
C
sss
pp
ss
nn
ωsω.sω.s
KsKsKs
KsKsK
sGG
sGG
sR
sYsT
sGs
KsKsKsG
sG
esGKK
Ae
ssssssG
R(s) GP(s) GC(s) G(s) Y(s)
D(s)
+ + +
-
U(s) E(s)
34
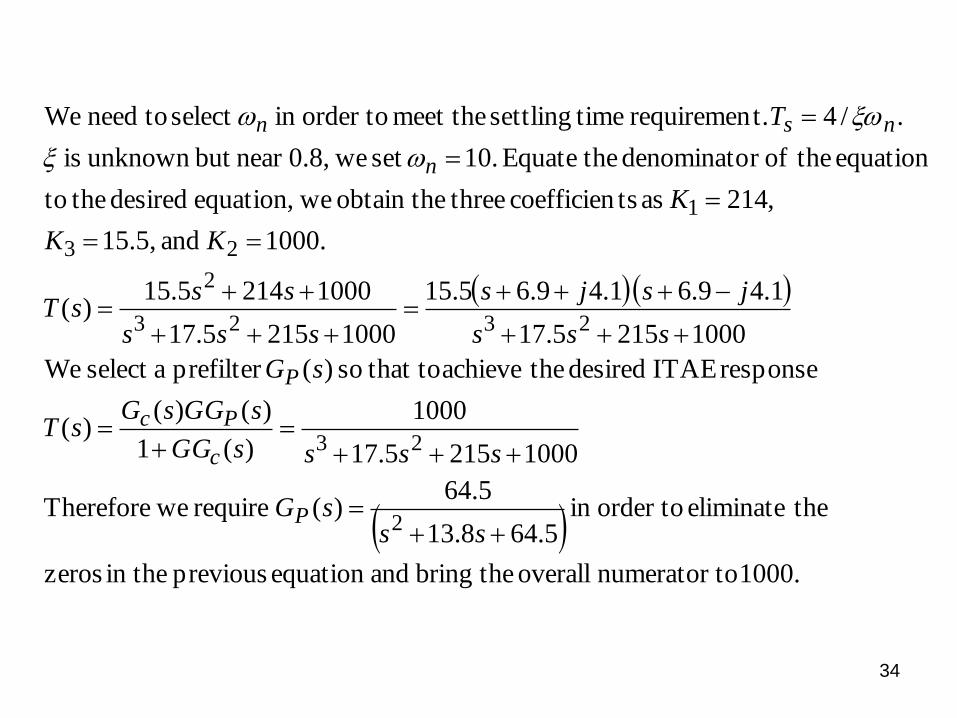
1000. tonumerator overall thebring andequation previous in the zeros
theeliminate order toin 5.648.13
5.64)( require weTherefore
10002155.17
1000
)(1
)()()(
response ITAE desired theachieve that toso )(prefilter aselect We
10002155.17
1.49.6 1.49.65.15
10002155.17
10002145.15)(
1000. and 15.5,
,214 as tscoefficien threeobtain the weequation, desired theto
equation theofr denominato theEquate 10.set we0.8,near but unknown is
./4 t.requiremen timesettling meet the order toin select toneed We
2
23
2323
2
23
1
sssG
ssssGG
sGGsGsT
sG
sss
jsjs
sss
sssT
KK
K
T
P
c
Pc
P
n
nsn
35
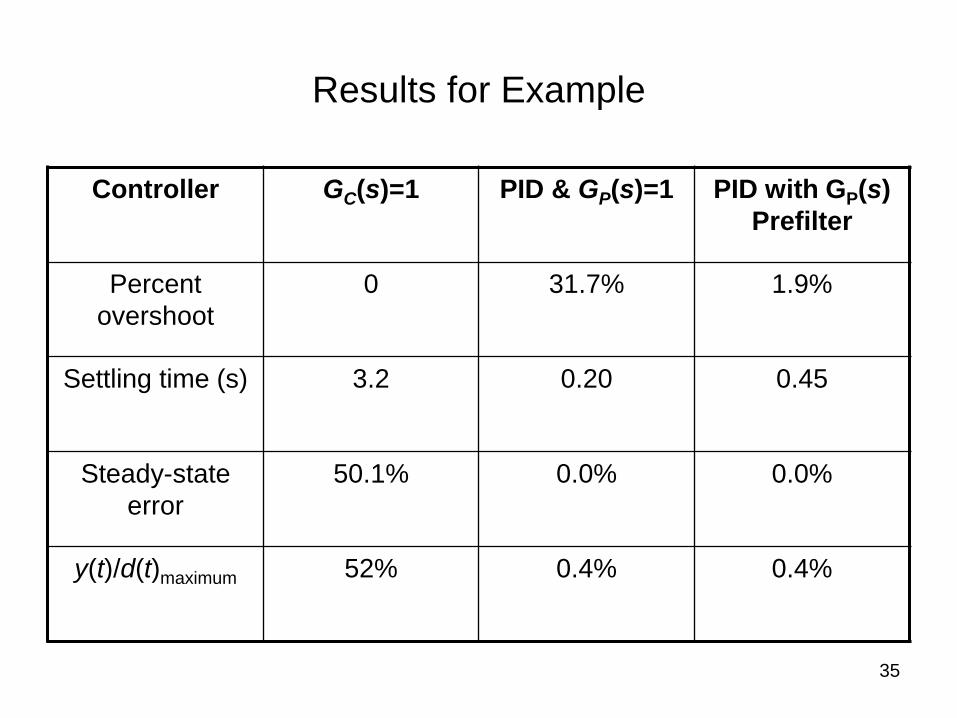
Results for Example
Controller GC(s)=1 PID & GP(s)=1 PID with GP(s)
Prefilter
Percent
overshoot
0 31.7% 1.9%
Settling time (s) 3.2 0.20 0.45
Steady-state
error
50.1% 0.0% 0.0%
y(t)/d(t)maximum 52% 0.4% 0.4%
36
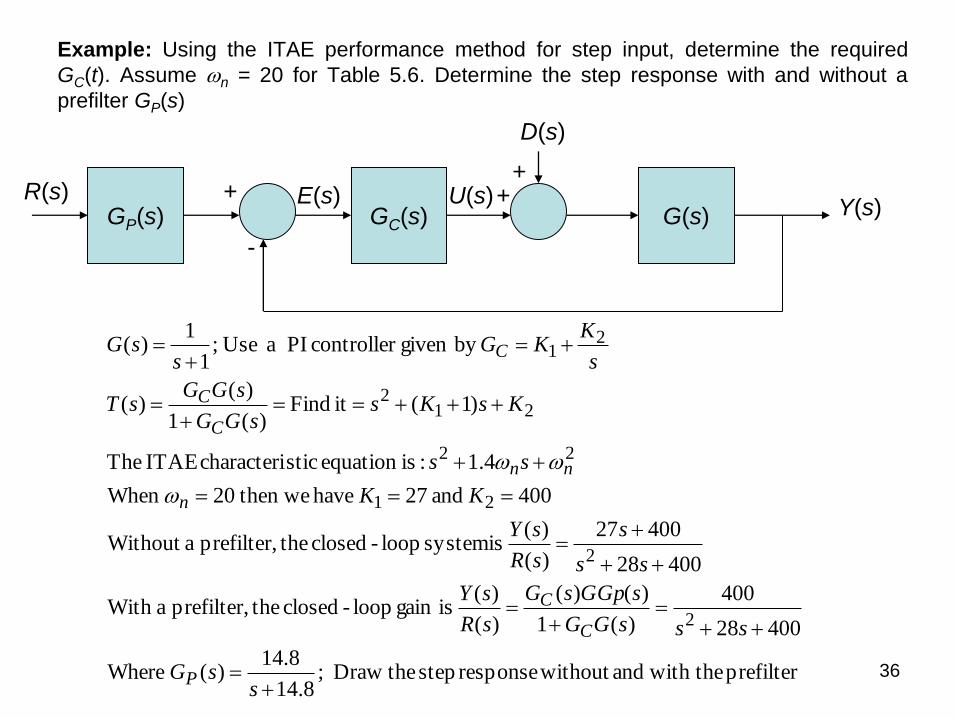
Example: Using the ITAE performance method for step input, determine the required
GC(t). Assume n = 20 for Table 5.6. Determine the step response with and without a
prefilter GP(s)
prefilter with theand without response step theDraw ;8.14
8.14)( Where
40028
400
)(1
)()(
)(
)( isgain loop-closed theprefilter, aWith
40028
40027
)(
)( is system loop-closed theprefilter, aWithout
400 and 27 have then we20When
4.1 :isequation sticcharacteri ITAE The
)1(it Find )(1
)()(
by given controller PI a Use;1
1)(
2
2
21
22
212
21
ssG
sssGG
sGGpsG
sR
sY
ss
s
sR
sY
KK
ss
KsKssGG
sGGsT
s
KKG
ssG
P
C
C
n
nn
C
C
C
GP(s) GC(s) G(s) Y(s)
D(s)
+ + +
-
U(s) E(s) R(s)
37
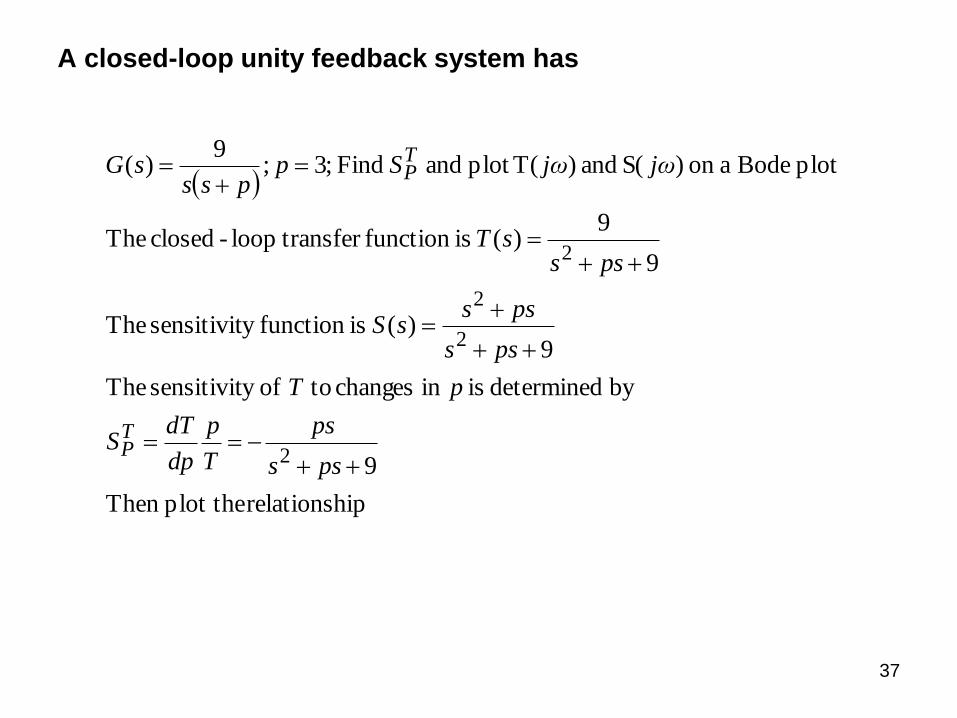
A closed-loop unity feedback system has
iprelationsh plot theThen
9
by determined is in changes to ofy sensitivit The
9)( isfunction y sensitivit The
9
9)( isfunction transfer loop-closed The
plot Bode aon )S( and )T(plot and Find ;3;9
)(
2
2
2
2
pss
ps
T
p
dp
dTS
pT
pss
psssS
psssT
jωjωSppss
sG
TP
TP
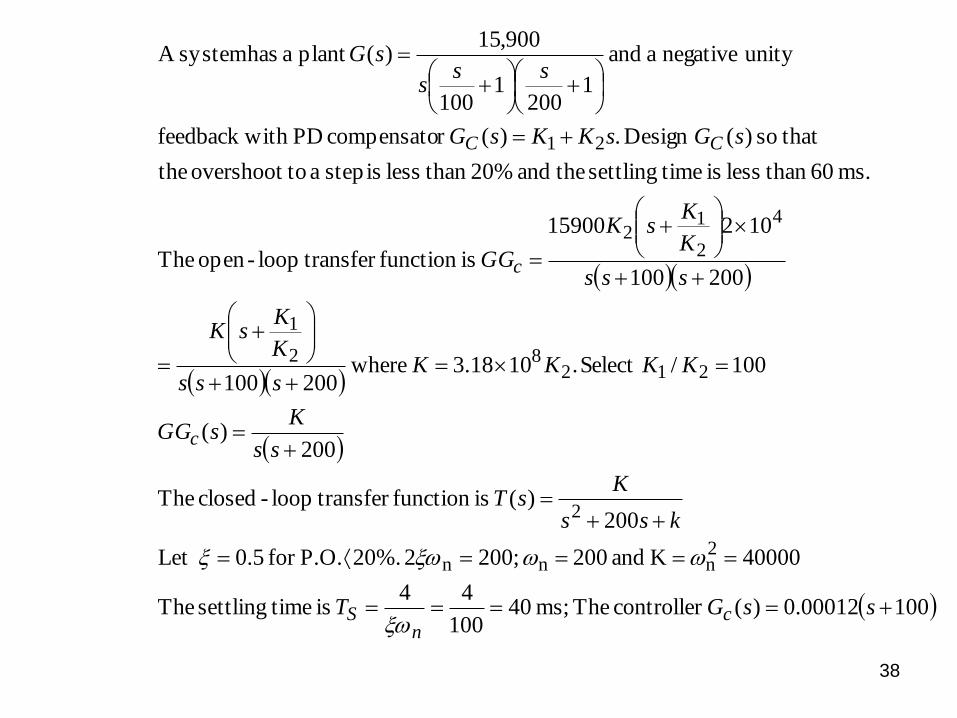
38
10000012.0)( controller The ms; 40100
44 is timesettling The
40000K and 200 200;2 20%. P.O.for 0.5Let
200)( isfunction transfer loop-closed The
200)(
100/Select .1018.3 where200100
200100
10215900
isfunction transfer loop-open The
ms. 60 than less is timesettling theand 20% than less is step a toovershoot the
that so )(Design .)(r compensato PDith feedback w
unity negative a and
1200
1100
900,15)(plant a has systemA
2nnn
2
21282
1
4
2
12
21
ssGT
kss
KsT
ss
KsGG
KKKKsss
K
KsK
sss
K
KsK
GG
sGsKKsG
sss
sG
cn
S
c
c
CC
39
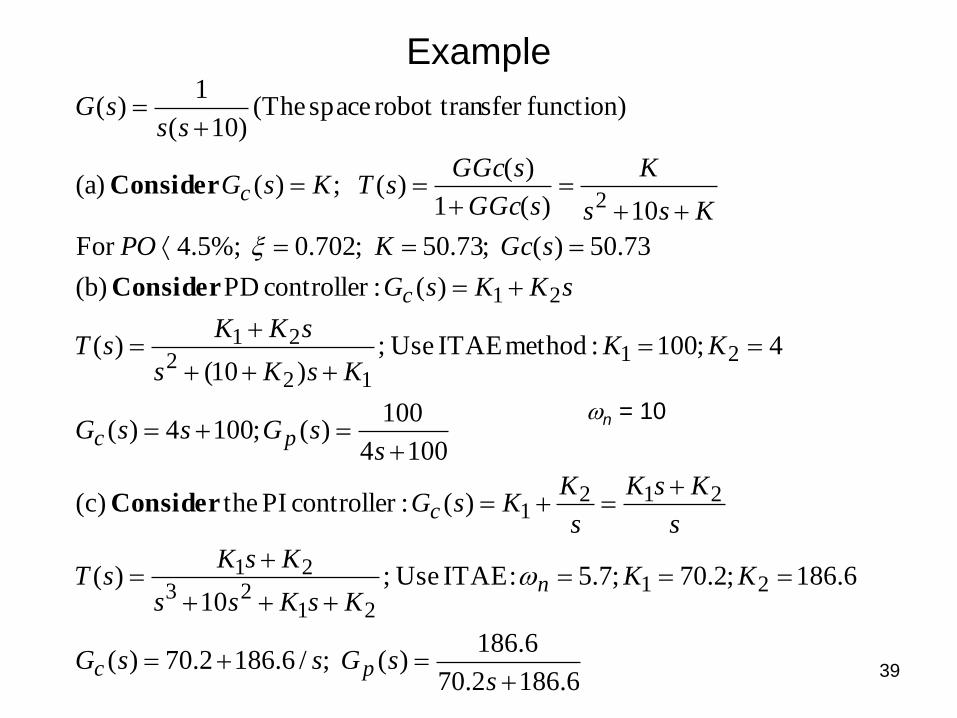
Example
6.1862.70
6.186)( ;/6.1862.70)(
6.186;2.70;7.5 :ITAE Use;10
)(
)( :controller PI the )c(
1004
100)(;1004)(
4;100 :method ITAE Use;)10(
)(
)( :controller PD (b)
73.50)( ;73.50 ;702.0 4.5%; For
10)(1
)()( ;)( (a)
function)sfer robot tran space (The)10(
1)(
21
2123
21
2121
21
122
21
21
2
ssGssG
KKKsKss
KsKsT
s
KsK
s
KKsG
ssGssG
KKKsKs
sKKsT
sKKsG
sGcKPO
Kss
K
sGGc
sGGcsTKsG
sssG
pc
n
c
pc
c
c
Consider
Consider
Consider
n = 10
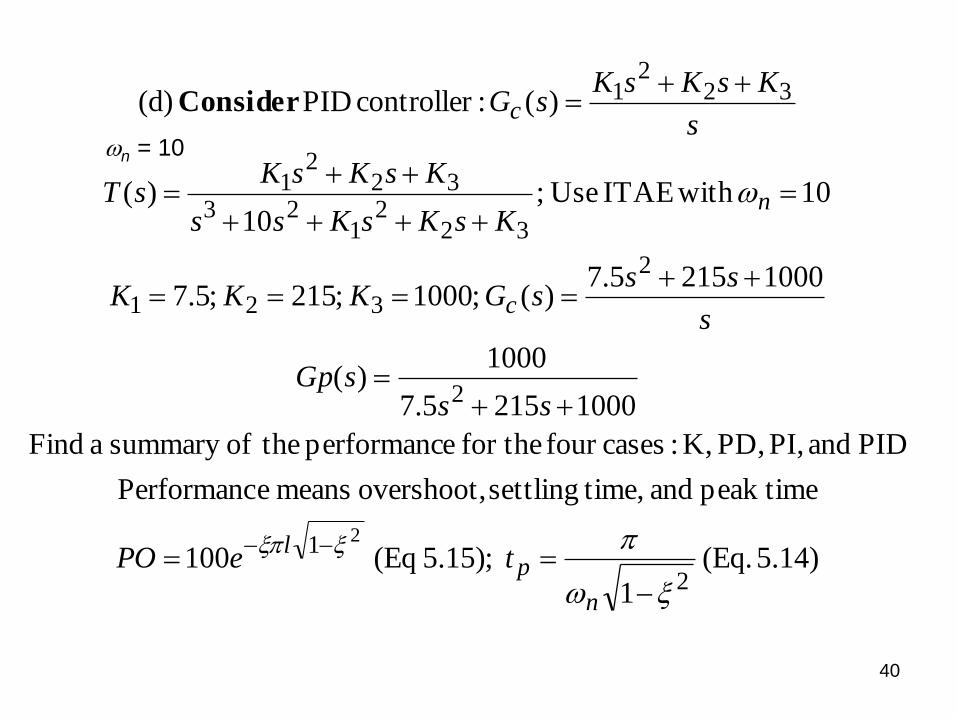
40
5.14) (Eq.
1
;5.15) (Eq 100
peak time and time,settling overshoot, means ePerformanc
PID and PI, PD, K, :casesfour for the eperformanc theofsummary a Find
10002155.7
1000)(
10002155.7)( ;1000 ;215 ;5.7
10 with ITAE Use;10
)(
)( :controller PID (d)
2
1
2
2
321
322
123
322
1
322
1
2
n
pl
c
n
c
tePO
sssGp
s
sssGKKK
KsKsKss
KsKsKsT
s
KsKsKsGConsider
n = 10
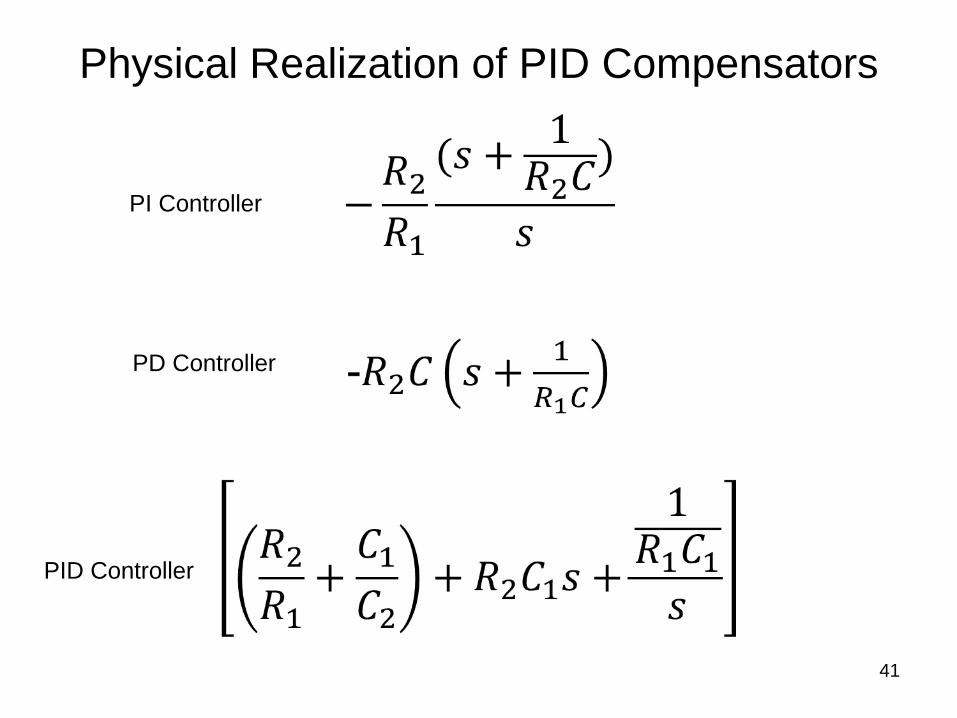
Physical Realization of PID Compensators
41
PI Controller
PD Controller
PID Controller