Embed Size (px)
Citation preview
ROBOTIKA
1
HISTORIE, SOUČASNOST A BUDOUCNOST
ROBOTIKY
(Stacionární roboty)
Prof. František Šolc
ROBOTIKA
2
Úvod
Historie robotiky
SoučasnostRozdělení robotů
Stacionární robotyZákladní charakteristiky
Programování a řízení
Statistiky vývoje
Aplikace
BudoucnostSměry výzkumu ve stacionární robotice
Závěr
OBSAH PŘEDNÁŠKY
ROBOTIKA
3
Průmyslové roboty – stacionární roboty
Úvod

ROBOTIKA
4
Androidy
umělé napodobeniny člověka
18. století
Pierre Jaquet Droz
Jacques de Vaucanson
Baron von Kempelen
“Obdivuji ty co se tolik namáhají
vytvořit to co Bůh stvořil tak snadno“
Jean de la Varende
Historie

5

ROBOTIKA
6
1920
ROBOT
R.U.R.
Rossum’s Universal Robots
Karel a Josef Čapkovi
Historie

ROBOTIKA
7
1942 Zákony robotiky
- Robot nesmí ublížit člověku, nebo svou nečinností dopustit, aby člověku bylo ublíženo
- Robot musí uposlechnout příkazů člověka, kromě případů, kdy tyto příkazy jsou v rozporu s prvním zákonem
- Robot musí chránit sám sebe před zničením, kromě případů, kdy tato chrana je v rozporu s prvním nebo druhým zákonem
Historie

ROBOTIKA
8
1946 – ENIAC (Univ. Pelsynvania)
1951 – Mechanický telemanipulátor
1960 – První průmyslové roboty Versatran Unimate
1964 – Laboratoř U.I. na MIT (Minsky)
1968 – Autonomní mobilní robot Shakey na MIT
1972 – Japan Industrial Robot Association
1974 – Robot Institute of America
1975 – Robot ASEA IRb6
Historie

ROBOTIKA
9
1960 Unimate a VersatranPrvní průmyslové roboty vyvinuté v U.S.A. George DevolJoseph Engelberger
Hydraulické servomechanismy, elektromechanické řízení programovacím bubnem
Průmyslové roboty
Historie

ROBOTIKA
10PR16 P PR32 E
1980 VUKOV Prešov
Historie
ROBOTIKA
11
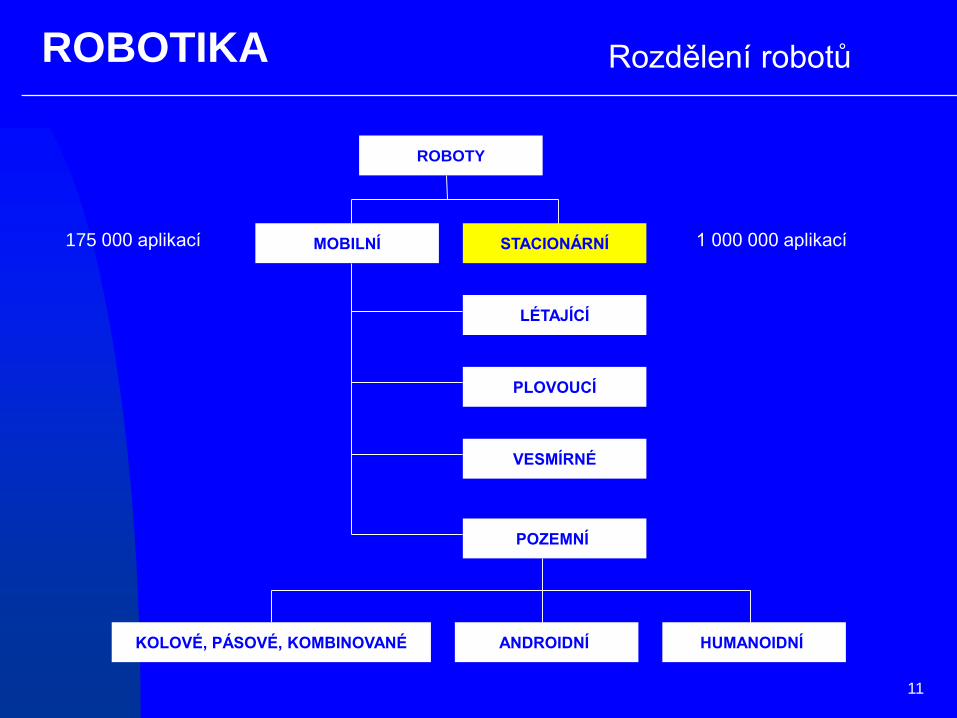
ROBOTY
MOBILNÍ STACIONÁRNÍ
LÉTAJÍCÍ
PLOVOUCÍ
VESMÍRNÉ
POZEMNÍ
KOLOVÉ, PÁSOVÉ, KOMBINOVANÉ ANDROIDNÍ HUMANOIDNÍ
Rozdělení robotů
1 000 000 aplikací175 000 aplikací
ROBOTIKA
12
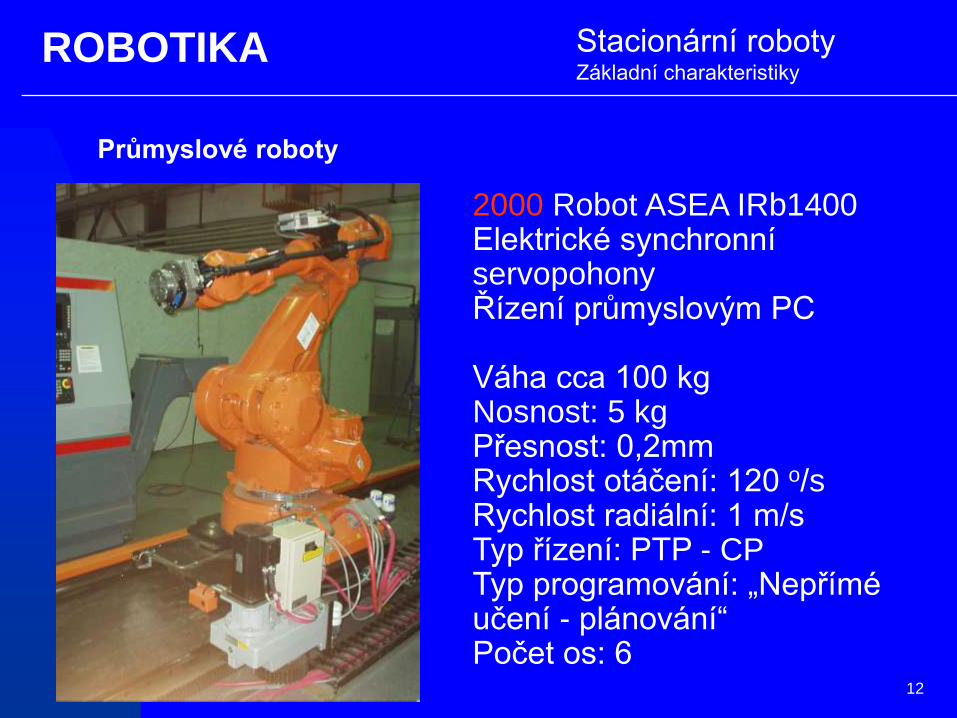
2000 Robot ASEA IRb1400Elektrické synchronní servopohonyŘízení průmyslovým PC
Váha cca 100 kgNosnost: 5 kgPřesnost: 0,2mmRychlost otáčení: 120 o/sRychlost radiální: 1 m/sTyp řízení: PTP - CPTyp programování: „Nepřímé učení - plánování“Počet os: 6
Průmyslové roboty
Stacionární robotyZákladní charakteristiky

ROBOTIKA
13
Kinematické koncepce, počet stupňů volnosti
VERSATRAN UNIMATE
Stacionární robotyZákladní charakteristiky

ROBOTIKA
14
Speciální kinematické
koncepce zvětšující
manipulační schopnosti
Stacionární robotyZákladní charakteristiky

ROBOTIKA
15
Eulerovo zápěstí
Chapadla a technologické hlavice
Stacionární robotyZákladní charakteristiky
Koncové členy

ROBOTIKA
16
Progresivní mechanické prvky použité u robota ASEA IRb6
Harmonická
převodovkaKuličkový šroub
Stacionární robotyZákladní charakteristiky

ROBOTIKA
17
PROGRAMOVÁNÍ
NEPŘÍMÉ UČENÍ
PŘÍMÉ UČENÍ
PLÁNOVÁNÍ
ŘÍZENÍ
PTP
CP
MANUÁLNÍ
Stacionární robotyProgramování a řízení

ROBOTIKA
18
Typ programování-nepřímé učení
Stacionární robotyProgramování a řízení

ROBOTIKA
19
Typ řízeníPTP – Point To Point
Stacionární robotyProgramování a řízení

ROBOTIKA
20
Typ programování-přímé učení
Stacionární robotyProgramování a řízení
Typ řízení CP
Continuous Path

ROBOTIKA
21
Průmyslové roboty
Programovací panel
Robota ASEA
IRb1400
umožňuje
programování
(plánování dráhy) v
pracovním prostoru
Stacionární robotyProgramování a řízení
ROBOTIKA
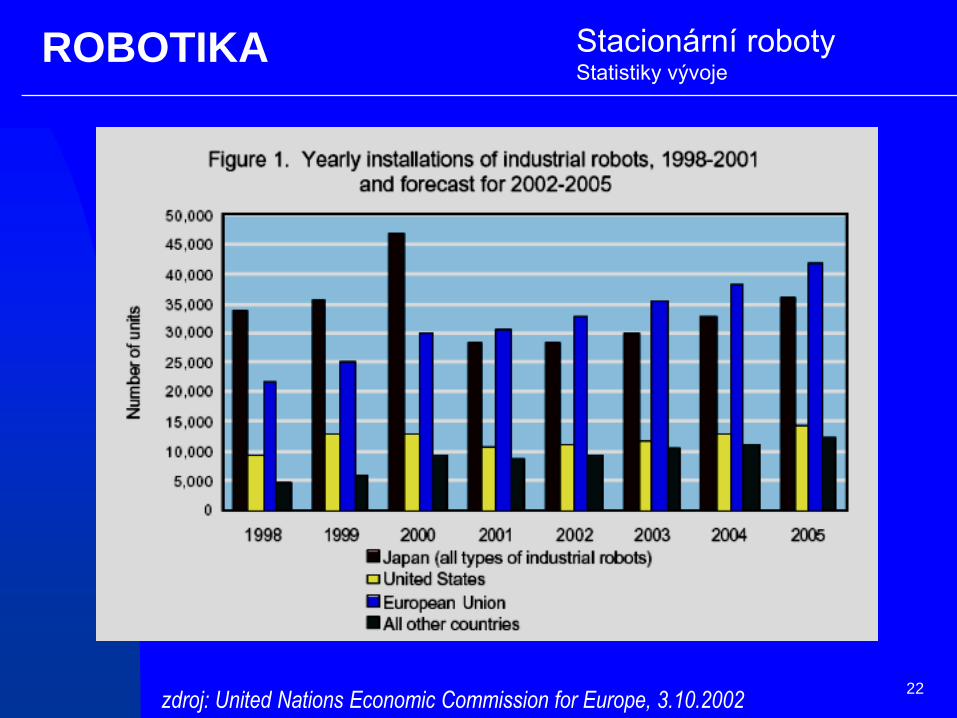
22zdroj: United Nations Economic Commission for Europe, 3.10.2002
Stacionární robotyStatistiky vývoje
ROBOTIKA
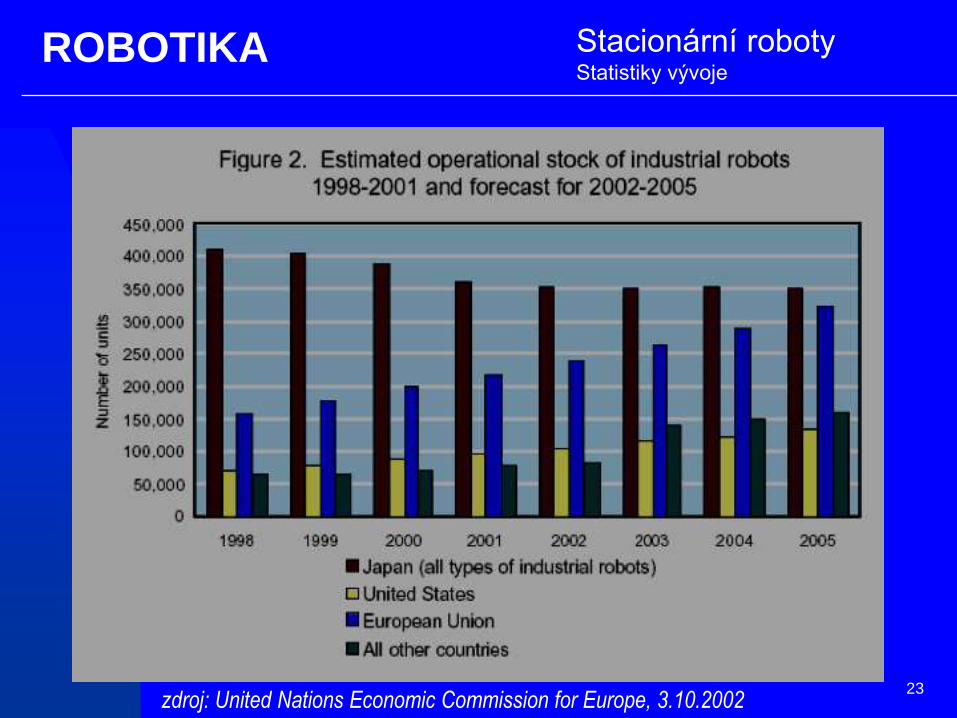
23zdroj: United Nations Economic Commission for Europe, 3.10.2002
Stacionární robotyStatistiky vývoje
ROBOTIKA
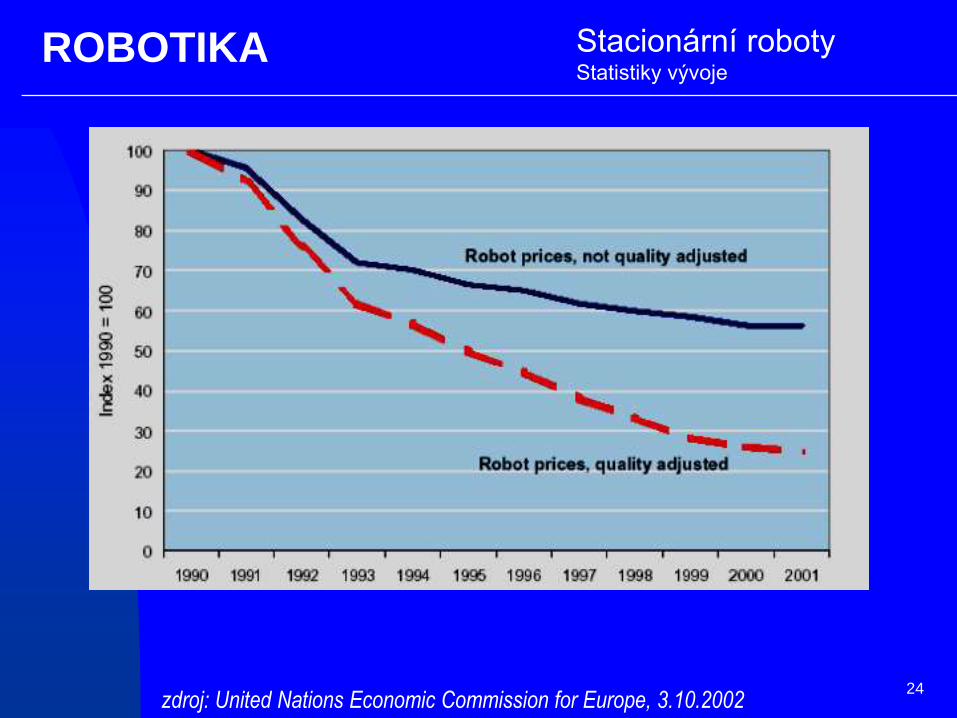
24zdroj: United Nations Economic Commission for Europe, 3.10.2002
Stacionární robotyStatistiky vývoje

ROBOTIKA
25zdroj: United Nations Economic Commission for Europe, 3.10.2002
Stacionární robotyStatistiky vývoje
ROBOTIKA
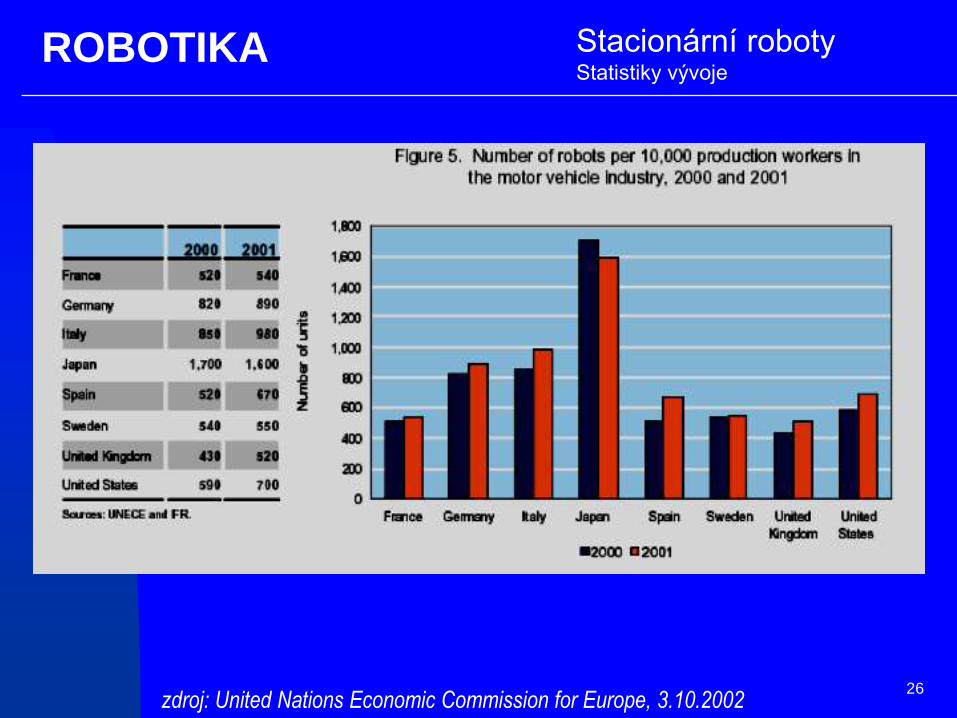
26zdroj: United Nations Economic Commission for Europe, 3.10.2002
Stacionární robotyStatistiky vývoje

ROBOTIKA
27
Stacionární roboty – aplikace
Roboty
Aplikace
Konvenční Pokročilé
Klasické Průmyslové aplikace Montáže, demontáže
Pokročilé Aplikace v
potravinářství a
zemědělství
Chirurgické
operace
Stacionární robotyAplikace

ROBOTIKA
28
Stacionární robotyAplikace
Klasické aplikace

ROBOTIKA
29
Stacionární robotyAplikace
Pokročilé aplikace
Milking robots 2002 – 500ks, 2005 - 1000ks

ROBOTIKA
30
Stacionární robotyAplikace
Automatické tankování
vozidel
(tankování automobilů na
vodíkový pohon)
2002 – 50ks 2005 – 1000ks
Pokročilé aplikace
ROBOTIKA
31
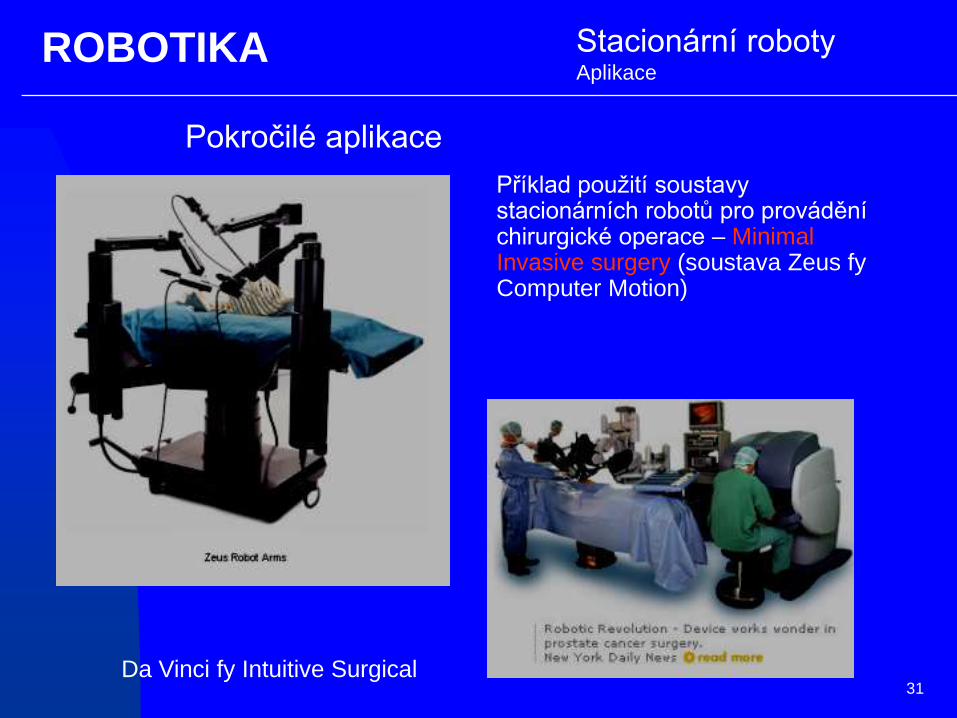
Příklad použití soustavy stacionárních robotů pro provádění chirurgické operace – Minimal Invasive surgery (soustava Zeus fy Computer Motion)
Da Vinci fy Intuitive Surgical
Stacionární robotyAplikace
Pokročilé aplikace

ROBOTIKA
32
Stacionární robotyAplikace
Pokročilé aplikace

ROBOTIKA
33
Perspektivní směry výzkumu ve stac. robotice
• Problémy řízení rychlých a pružných robotických systémů
• Problémy řízení v pracovním prostoru s pomocí vnější vazby
• Konstrukce a řízení paralelních struktur
• Přímé plánování s pomocí výkresové dokumnetace CAD
• Netradční pohony
• Aplikace telepresence
• Zvyšování manipulačních schopností – ruka
(pomoc tělesně postiženým)
Budoucnost
ROBOTIKA
34
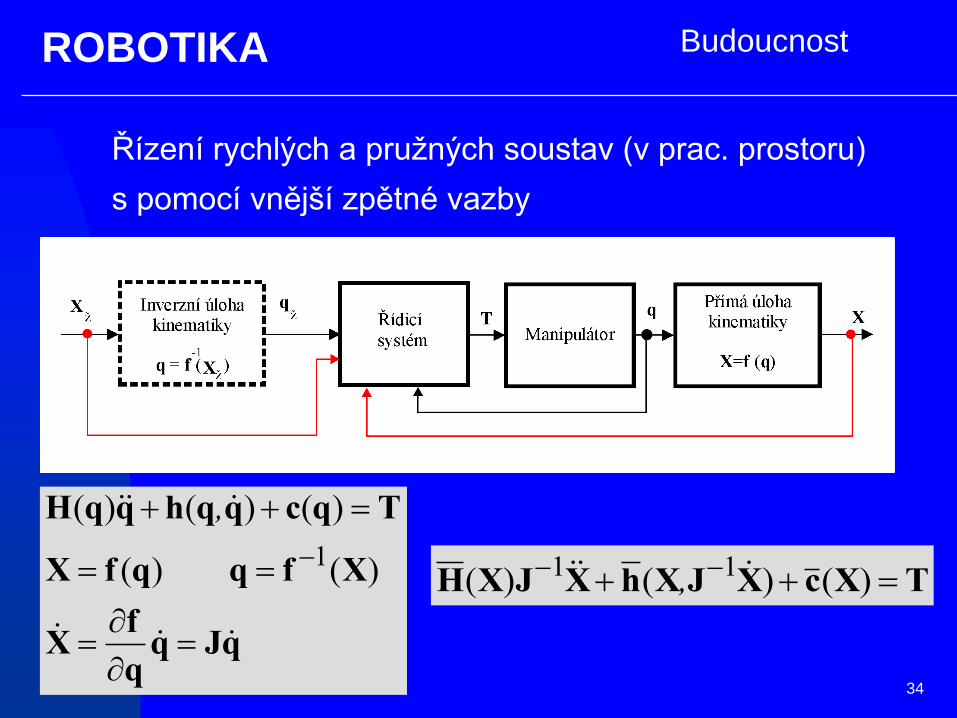
Řízení rychlých a pružných soustav (v prac. prostoru)
s pomocí vnější zpětné vazby
qJqq
fX
XfqqfX
TqcqqhqqH
)()(
)()()(
1
,
TXcXJXhXJXH )()()( 11 ,
Budoucnost

ROBOTIKA
35
Výhody
-zrychlení dynamiky
-zvýšení tuhosti
Nevýhody
-zmenšení pracovního prostoru
-složitý způsob řízení
Konstrukce a řízení paralelních struktur
Budoucnost

ROBOTIKA
36
Roboty ASEA IRb6 vybavené optickou zpětnou vazbou a řidicím systémem s programováním v pracovním prostoru robota. Výsledek grantu GAČR 101932435
Přímé plánování s pomocí výkresové dokumentace CAD
Budoucnost

ROBOTIKA
37
p0 = 10 kPa p1 = 500 kPa
Netradiční pohony
Pneumatické svaly (McKibben)
-zkrácení 10%
-mech. napětí 0,5 MPa
Lidské svaly
-zkrácení 40%
-mech. napětí 0,35 MPa
Budoucnost
GAČR 102/02/0782
ROBOTIKA
38
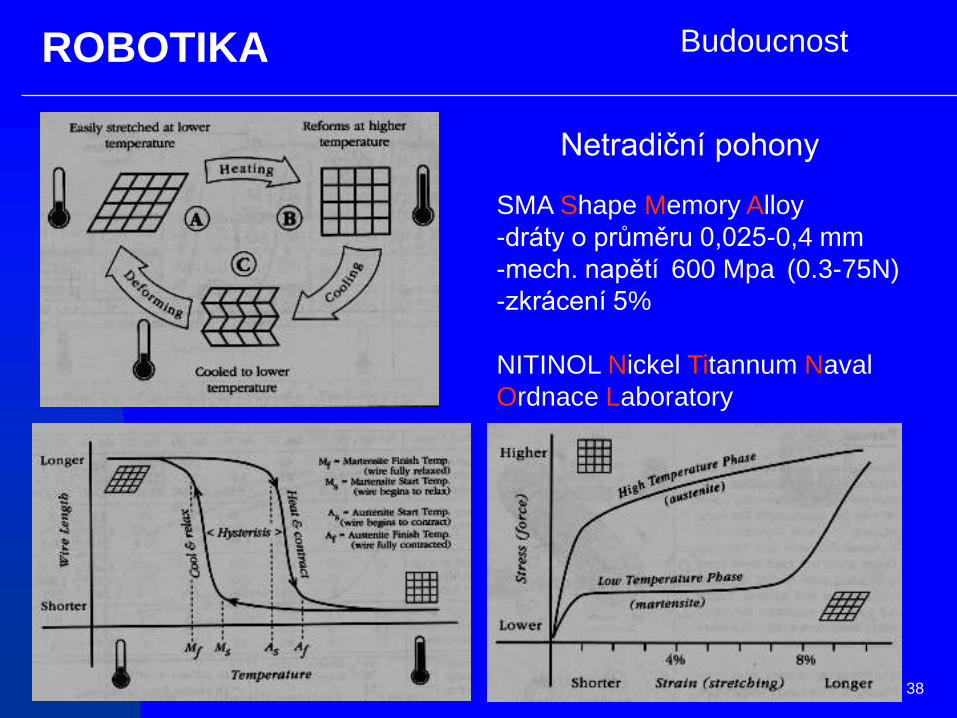
Netradiční pohony
SMA Shape Memory Alloy
-dráty o průměru 0,025-0,4 mm
-mech. napětí 600 Mpa (0.3-75N)
-zkrácení 5%
NITINOL Nickel Titannum Naval
Ordnace Laboratory
Budoucnost

ROBOTIKA
39
Budoucnost

ROBOTIKA
40
Stacionární roboty mohou být k provádění citlivých manipulačních úkonů řízeny dálkově člověkem. Slouží k tomu např. speciální rukavice, ve kterých operátor cítí uchopovaný objekt.
Aplikace telepresence
Budoucnost
GAČR 102/02/0782
ROBOTIKA
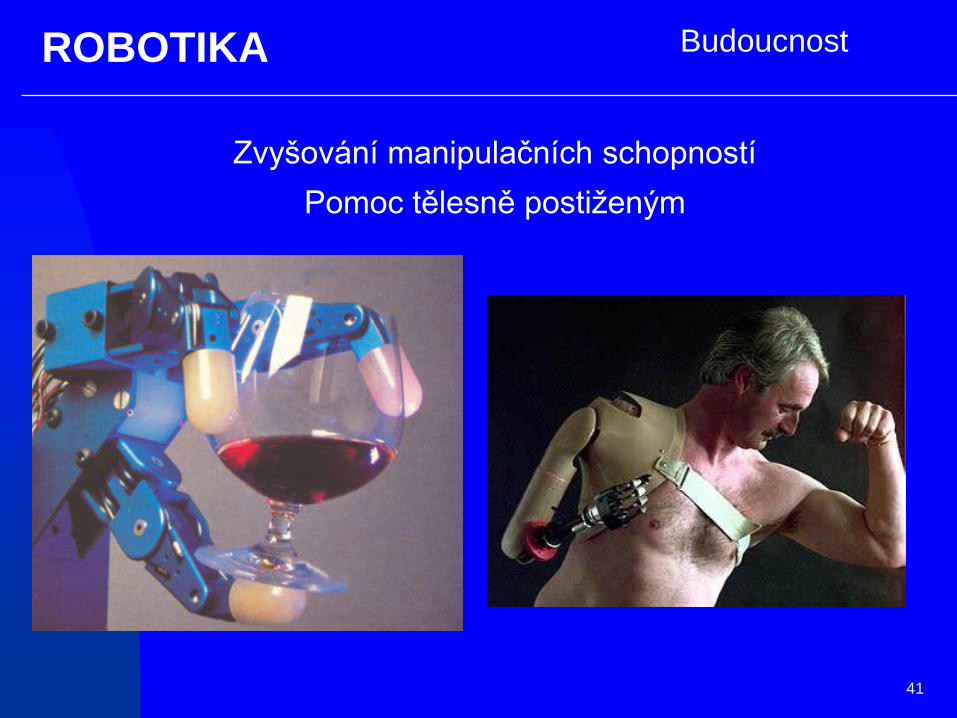
41
Zvyšování manipulačních schopností
Pomoc tělesně postiženým
Budoucnost
ROBOTIKA
42
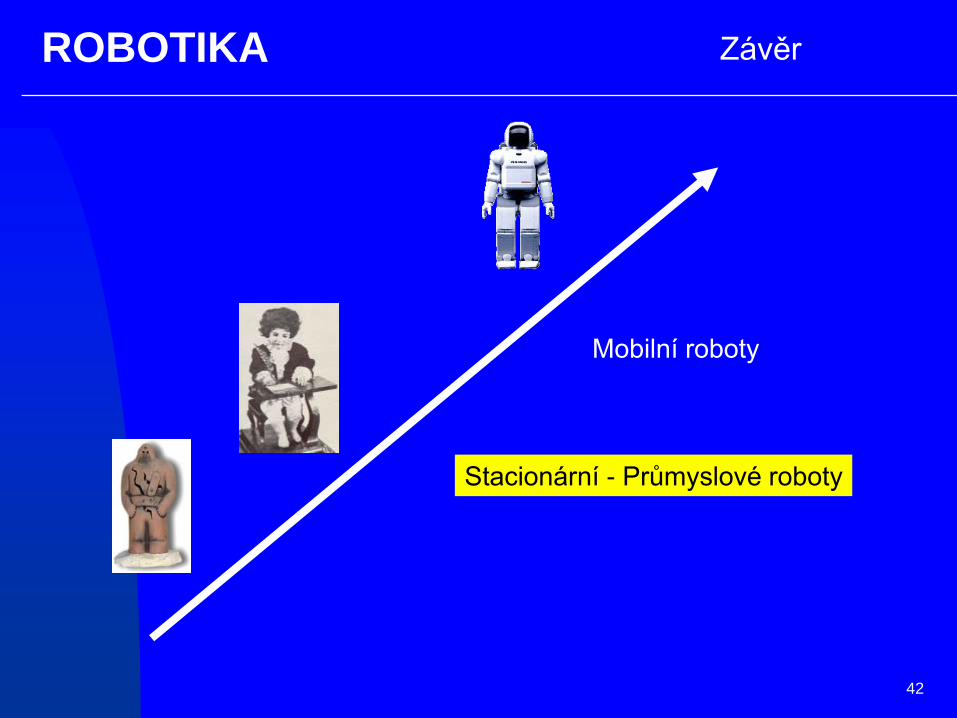
Stacionární - Průmyslové roboty
Závěr
Mobilní roboty
ROBOTIKA
43
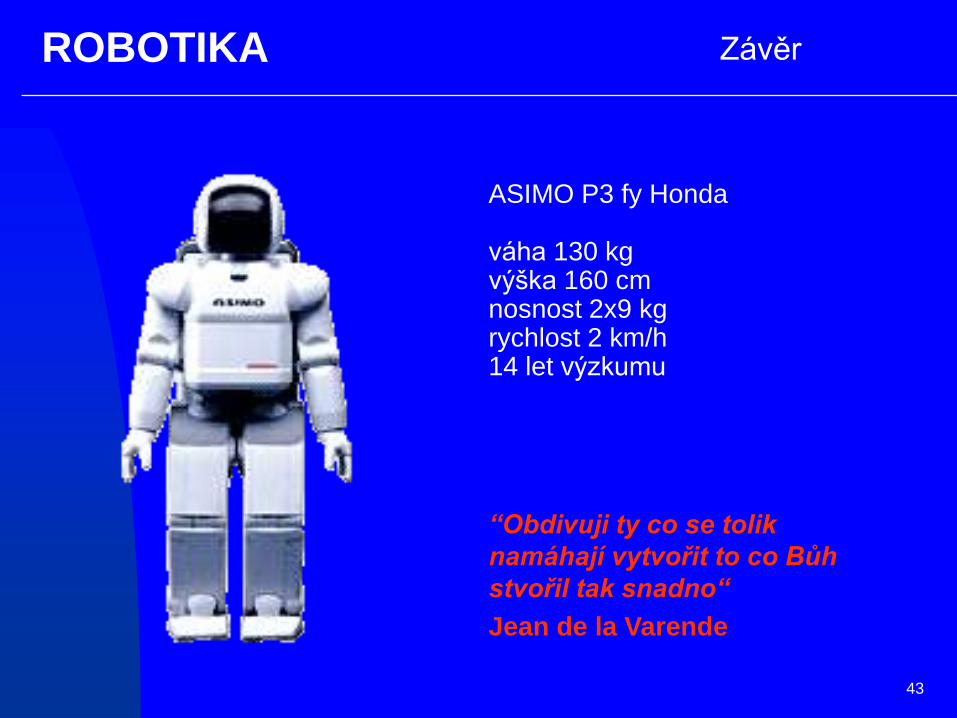
ASIMO P3 fy Honda
váha 130 kgvýška 160 cmnosnost 2x9 kgrychlost 2 km/h14 let výzkumu
“Obdivuji ty co se tolik
namáhají vytvořit to co Bůh
stvořil tak snadno“
Jean de la Varende
Závěr

ROBOTIKA
44
Závěr
ROBOTIKA
45
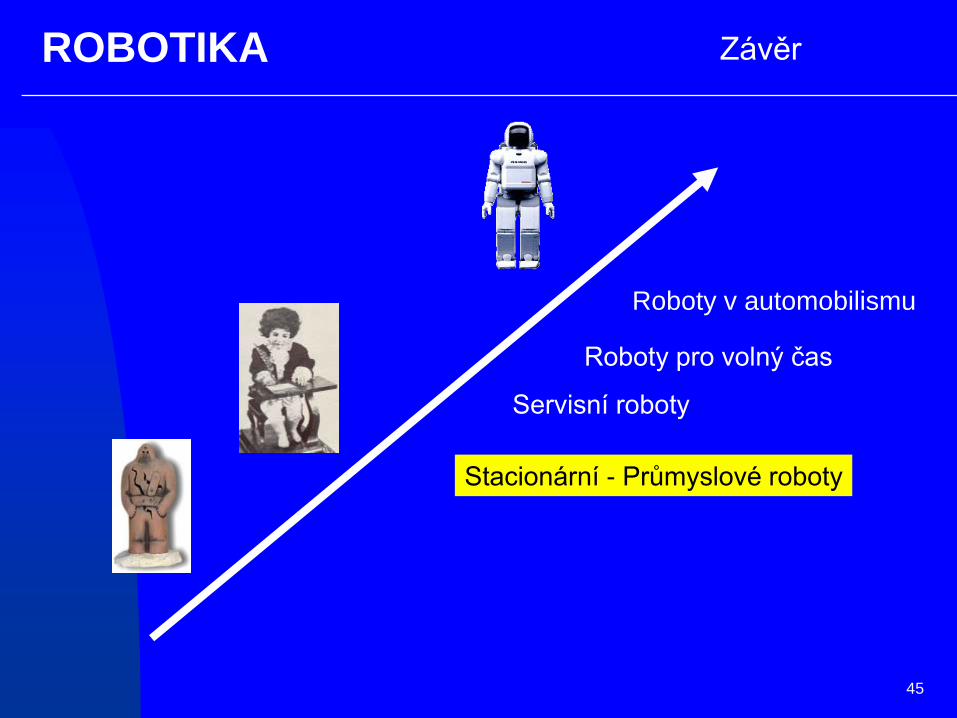
Stacionární - Průmyslové roboty
Servisní roboty
Roboty pro volný čas
Roboty v automobilismu
Závěr





























