Embed Size (px)
Citation preview

Robotics
Notes
Holger Findling
My CI Group

Robotics
© 2015. My CI Group. All rights reserved.

Contents Introduction ................................................................................................................................................... 6
Fundamentals ................................................................................................................................................ 7
Basic Analog Circuits ............................................................................................................................... 7
Voltage Divider ..................................................................................................................................... 9
Angular Position of a Potentiometer ................................................................................................... 11
Powering an LED ................................................................................................................................ 12
Analog and Digital Signals ..................................................................................................................... 13
Basic Mechanics ..................................................................................................................................... 14
Velocity ............................................................................................................................................... 14
Acceleration ........................................................................................................................................ 14
Torque ................................................................................................................................................. 15
Electro-Mechanics .................................................................................................................................. 15
Laplace Transforms ................................................................................................................................ 19
Feedback Circuits ................................................................................................................................ 19
Common Amplifier Configurations .................................................................................................... 20
Servo Systems ............................................................................................................................................. 24
Basic Servo System ................................................................................................................................. 24
Robotic Arm – Gripper with 5 Degree Freedom .................................................................................... 26
Robotic Arm – 6 Degree Freedom .......................................................................................................... 28
Rotation Kinematics .................................................................................................................................... 30
Kinematics .................................................................................................................................................. 31
Rotation about Z axis .......................................................................................................................... 34
Forward Kinematics .................................................................................................................................... 35
Inverse Kinematics ...................................................................................................................................... 36
Software and Sketches ................................................................................................................................ 37
Structure .............................................................................................................................................. 38
setup() ................................................................................................................................................. 38
Control Structures ............................................................................................................................... 38
Further Syntax ..................................................................................................................................... 38
Arithmetic Operators .......................................................................................................................... 38
Comparison Operators ........................................................................................................................ 39
Boolean Operators .............................................................................................................................. 39
Pointer Access Operators .................................................................................................................... 39
Bitwise Operators ................................................................................................................................ 39

Compound Operators .......................................................................................................................... 39
Variables ................................................................................................................................................. 40
Constants ............................................................................................................................................. 40
Data Types .......................................................................................................................................... 40
Conversion .......................................................................................................................................... 41
Variable Scope & Qualifiers ............................................................................................................... 41
Utilities ................................................................................................................................................ 41
Functions ................................................................................................................................................. 41
Digital I/O ........................................................................................................................................... 41
Analog I/O .......................................................................................................................................... 42
Due & Zero only ................................................................................................................................. 42
Advanced I/O ...................................................................................................................................... 42
Time .................................................................................................................................................... 42
Math .................................................................................................................................................... 43
Trigonometry ...................................................................................................................................... 43
Random Numbers ............................................................................................................................... 43
Bits and Bytes ..................................................................................................................................... 43
External Interrupts .............................................................................................................................. 43
Interrupts ............................................................................................................................................. 44
Communication ................................................................................................................................... 44
USB (32u4 based boards and Due/Zero only) .................................................................................... 44
Figure 1- Basic Analog Circuit ..................................................................................................................... 7 Figure 2 - Voltage Divider ............................................................................................................................ 9 Figure 3 – Potentiometer ............................................................................................................................. 10 Figure 4 - LED Circuit ................................................................................................................................ 12 Figure 5 - Signals ........................................................................................................................................ 13 Figure 6 - PWM .......................................................................................................................................... 13 Figure 7 - Servo Motor, RG-SRV 180 ........................................................................................................ 16 Figure 8 – Servo Motor, FS90MG .............................................................................................................. 17 Figure 9 - Amplifier with negative feedback .............................................................................................. 19 Figure 10 - Amplifier with positive feedback ............................................................................................. 20 Figure 11 - Chaining Amplifier Circuits ..................................................................................................... 20 Figure 12 - Summing outputs of two amplifiers ......................................................................................... 21 Figure 13 - Equivalent Circuits .................................................................................................................. 22 Figure 14 - Basic Servo System .................................................................................................................. 24

Figure 15 - Robotic Arm, 5 DOF ................................................................................................................ 26 Figure 16 - Robotic Arm, 5 DOF ................................................................................................................ 27 Figure 17 - 4R Geometry ............................................................................................................................ 27 Figure 18 - Robotic Arm 6 DOF and Laser Endpoint ................................................................................. 28 Figure 19 - Robotic Arm, 6 DOF ................................................................................................................ 28 Figure 20 - Robotic Laser Arm Dimensions ............................................................................................... 29
Table 1 - Power ............................................................................................................................................. 8 Table 2 - Angular Position versus Output Voltage ..................................................................................... 11 Table 3 - Specifications, RG-SRV 180 ....................................................................................................... 16 Table 4 - Specifications, FS90MG .............................................................................................................. 18

Introduction

Fundamentals
Control system components are typically comprised of electrical, mechanical, and electromechanical
devices. Together they build our basic servo system and robotics.
Basic Analog Circuits
Figure 1 shows a basic analog circuit comprised of a battery and a resistor. When the resistor is connected
to the battery a closed circuit is created and current (I) flows through resistor (R). By convention we trace
current flow from the positive terminal of the battery to the negative terminal. The negative terminal is
considered a reference point (ground) for the circuit. All voltages are measured in respect to ground.
Figure 1- Basic Analog Circuit
The voltage measured across the resistor is notated as VR (t) and it has the same voltage potential as the
battery voltage; V = 10 volts. We state that the positive terminal of the battery and the resistor are connected
to the same node. The current and voltage relationship can be expressed in regards to time.
VR (t) = I (t) * R
IR (t) / VR (t) = 1 / R
Since the battery voltage is a constant over some period of time, the current is constant over time as well.
Therefore, the time component is often ignored.
VR = I * R
I / VR = I / R

Since resistance is an opposition to current flow the resistor consumes energy. The energy is converted to
heat energy and designers have to ensure that the power ratings of the resistor are observed. Power
consumption is measured in watts.
P = I * VR (watts)
A good design implements a power safety factor of 3:1, however a 2:1 ratio may be sufficient for circuits
using small amount of voltages and currents. Typically resistors are commercially available in 1/8, 1/4, 1/2,
and 1 watt sizes.
Table 1 shows the relationship between resistance and current using a constant 10 volt source. The data
shows that the power consumption decreases as a function of I2 as the resistance increases.
Substitute VR = I * R into
P = I * V
V = I * (I * R)
P = I2 * R
Table 1 - Power
R (ohm) I (amp) P
(Watts)
100 0.100 1.000
200 0.050 0.500
300 0.033 0.333
400 0.025 0.250
500 0.020 0.200
600 0.017 0.167
700 0.014 0.143
800 0.013 0.125
900 0.011 0.111
1000 0.010 0.100
Example:
Given the data in Figure 1
VR = I * R
I = VR / R
I = 10 v / 1000 ohm
I = 0.01 amp or 10 ma
The power consumed PR by resistor R is a measure of current IR and voltage VR.
PR = IR * VR
PR = 0.01 amp * 10 v
PR = = 0.1 watt or 100 mw
The resistor should have a power rating of 1/4 watt using a power safety factor 2:1.
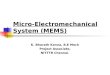
Voltage Divider
The circuit displayed in Figure 2 represents a voltage divider circuit. Resistors R1 and R2 proportionally
divide the voltage V and create an output voltage VR2.
V = 10 volt
R1 = 200 Ohm
I
R2 = 800 Ohm
VR2
Figure 2 - Voltage Divider
V = I * Rtotal
Substitute (R1 + R2) for RTotal
V = I * (R1 + R2)
I = V / (R1 + R2)
Substitute I = VR2 / R2

VR2 / R2 = V / (R1 + R2)
VR2 = V * (R2 / (R1 + R2))
Where
R2 / (R1 + R2) is the voltage divider ratio
Example:
Refer to Figure 2.
V = 10 volts
R1 = 200 ohm, R2 = 800 ohm
VR2 = V * (R2 / (R1 + R2))
VR2 = 10 v * (800 / (200 + 800))
VR2 = 8 volt
A variable resistor or potentiometer is a resistor with three terminals. The outside terminals are connected
to the endpoints of the resistor and the center terminal is connected to a sliding or rotating contact that forms
an adjustable voltage divider. In other words the resistance of R1 and R2 of the voltage divider can be
changed proportionately by turning the potentiometer shaft to some angular position Ø. Figure 3 displays a
typical potentiometer.
Figure 3 – Potentiometer
Example:
Assume a potentiometer has 10 K Ohm resistance and is rotated to the half point (centered).
Then R = R1 + R2
Where R1 = R2 or 10,000 ohm / 2 = 5000 ohm
If V = 10 volts then
VR2 = V * (R2 / (R1 + R2))
VR2 = 10 * (5000 / (5000 + 5000))
VR2 = 5 volts
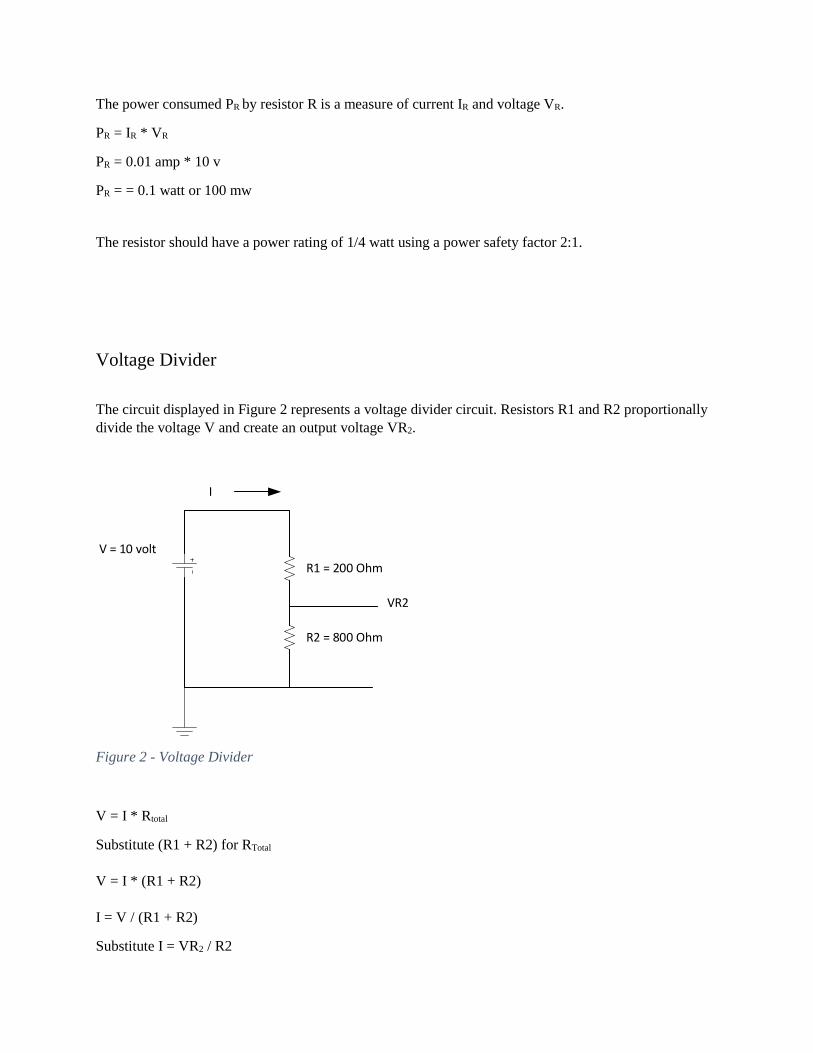
Angular Position of a Potentiometer
The voltage divider ratio R2/ (R1 + R2) can be expressed as the angular rotation Ø.
Suppose a 10,000 ohm potentiometer can rotate from 0 to 180 degrees, and the circuit uses a 10 volt
power supply. Table 2 shows the relationship between the angular position and the output voltage.
Table 2 - Angular Position versus Output Voltage
Degrees Radians Resistance Voltage
0 0.0000 0 10.00
45 0.7853 2500 7.50
90 1.5707 5000 5.00
135 2.3560 7500 2.50
180 3.1415 10000 0.00
VR = Kp r
Where Kp is the constant of proportionality between the shaft position and the potentiometer voltage. Kp
equates to the total voltage applied to the potentiometer divided by the maximum angle of rotation Ø max.
Kp = V / Ø max --- V/rad
Example:
Let V = 10 volts and Ø max = 180 deg.
Then
Kp = V / Ø max
Kp = 10 v / 180 degrees
Kp = 10 v / 3.14 Rad
Kp = 3.1847 (V/ Rad)
Example:
Suppose the potentiometer is turned 90 degrees or PI/2 Radians.
Then VR = KP r
VR = (3.1847 V/ Rad)* (PI / 2 Rad)
VR = 4.999979 volts or ~ 5.0 volts
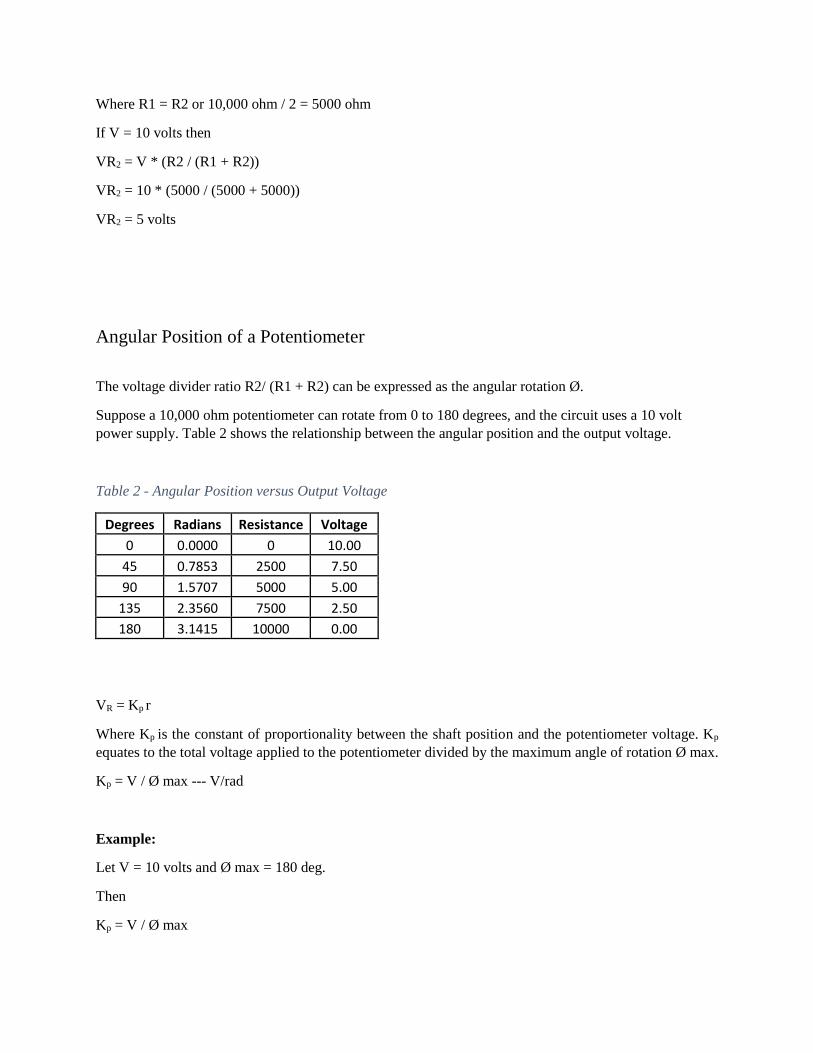
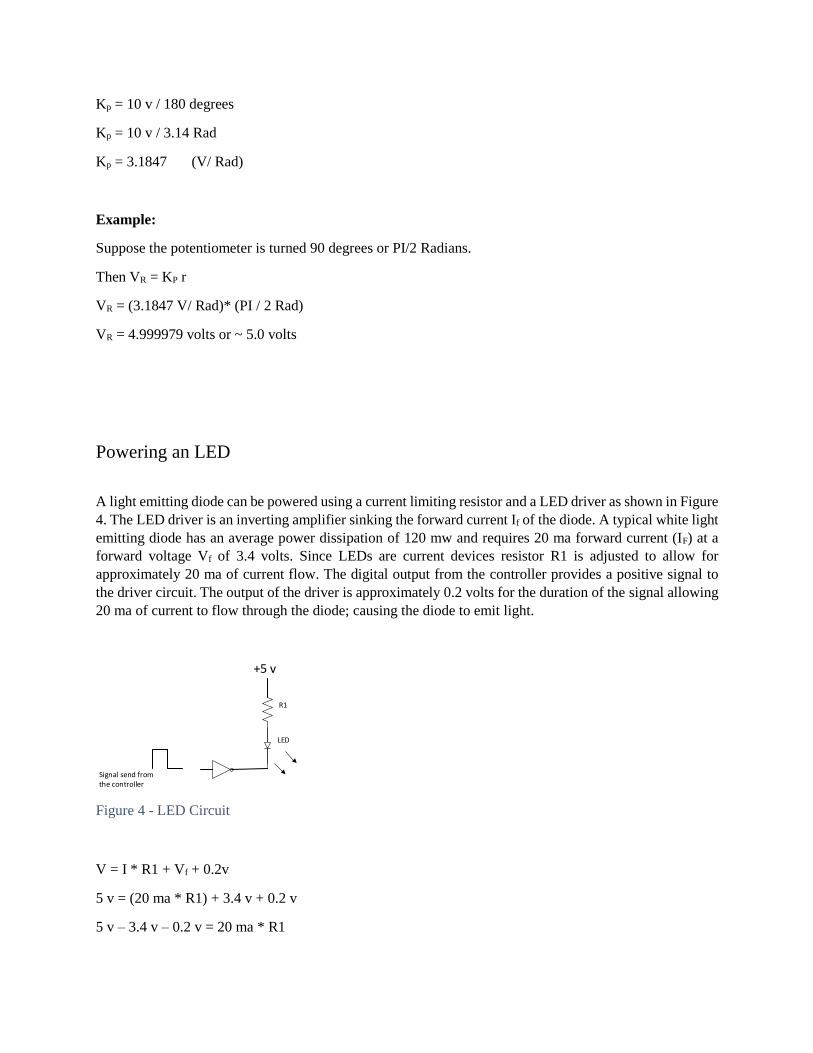
Powering an LED
A light emitting diode can be powered using a current limiting resistor and a LED driver as shown in Figure
4. The LED driver is an inverting amplifier sinking the forward current If of the diode. A typical white light
emitting diode has an average power dissipation of 120 mw and requires 20 ma forward current (IF) at a
forward voltage Vf of 3.4 volts. Since LEDs are current devices resistor R1 is adjusted to allow for
approximately 20 ma of current flow. The digital output from the controller provides a positive signal to
the driver circuit. The output of the driver is approximately 0.2 volts for the duration of the signal allowing
20 ma of current to flow through the diode; causing the diode to emit light.
+5 v
Signal send from the controller
LED
R1
Figure 4 - LED Circuit
V = I * R1 + Vf + 0.2v
5 v = (20 ma * R1) + 3.4 v + 0.2 v
5 v – 3.4 v – 0.2 v = 20 ma * R1

R1 = 1.4 v / 0.02 amp
R1 = 70 ohms
Analog and Digital Signals
Figure 5 displays a digital signal comprised of a stream of continuous pulses equally spaced apart. The
frequency of the signal is determined by
Frequency = 1 / Time
Time = t2 – t1
Amplitute
Gnd
t0 t1 t2
50 % Rise Time
Figure 5 - Signals
The pulse width is typically measured at the 50 percent level of the rise time of the pulse. A signal send to
a servo amplifier is usually pulse width modulated, implying that the pulse width of the signal specifies
the angular position of the servo motor. An advantage of using pulse width modulation is that the angular
position is not functionally dependent on the amplitude of the signal, which may vary considerable from
system to system.
Reference Signal
Pulse Width Modulated
Signal
Figure 6 - PWM
Example:
What is the frequency of a signal where t1 = 10 usec and t2 = 50 usec?
Time = t2 – t1
Time = 50 usec – 10 usec

Time = 40 usec
Frequency = 1/ 40 usec
Frequency = 0.025 MHz or 25 KHz
Example:
Suppose a servo motor can rotate from 0 to 180 degrees, and 1 millisecond represents 0 degrees and 2
milliseconds represents 180 degrees. Determine the angular position given a 1.2 millisecond signal.
(180deg – 0deg) / (180 – X) = (2msec – 1msec) / (2msec - 1.2msec)
180 / (180 – x) = 1 / 0.8
X = 180 – 0.8 * 180
X = 36 degrees
Basic Mechanics
Velocity
The velocity of a rigid object is the rate at which its position changes with time.
V (t) = (r2 – r1) / (t2 – t1) (m/sec)
V = dr / dt
Acceleration
Often the velocity of a moving object changes either in magnitude or direction, or both. The object has
acceleration which is the rate of change of its velocity with time.
a = dv / dt (m/sec2)

Torque
In translational motion we associate a force with the linear acceleration of a body.
ForceMass
Acceleration
F = m * a (N m)
Example:
Determine the acceleration of a 1 Kg mass when a 1 Newton force is applied.
F = m * a
1 N = 1 Kg * a
a = 1N / 1 Kg 1 m/ sec2
In rotational motion we associate torque with the angular acceleration of a body when a force is applied to
a moment arm r.
Ί = r x F (N m)
Electro-Mechanics
Figure 5 and Figure 6 display typical servo motors used for light weight robotic projects and hobby kits.
Their specifications are provided in Table 3 and Table 4. Of particular interest are the Stall Torque and No
Load Speed specifications required to calculate the transfer functions for the basic servo system in section
Servo Systems.

Figure 7 - Servo Motor, RG-SRV 180
Table 3 - Specifications, RG-SRV 180
Operating Voltage 6 v
Stall Torque 12 Kg.cm or 166.6oz.in
No Load Speed 43 RPM or 0.23 seconds per 60 deg
Operating Angle 180 deg
Weight 60 g
Size 30 x 45 x 51 mm
Stall Current 1600 ma
Standby/No Load Current 150 ma
Control Protocol PWM
Cable Length 270 mm
Material Plastic Body and Metal Gears
The speed – torque characteristics of a servo motor can be estimated.
Ί = k1 VR – k2 w
Where:
Ί = torque
k1 and k2 are constants
w is the angular velocity of the shaft.
K2 = - ∆ Ί / ∆ w
Where k2 is the rate of change of torque versus angular position.

Example:
Given the RG SRV 180 servo motor specification determine constant k1 and k2.
K1 = stall torque at rated voltage / max voltage
K1 = 12 Kg cm / 6 v
K1 = 2 Kg cm / v
K2 = stall torque / no-load speed.
K2 = 12 Kg cm / (0.23 sec / 60 deg)
K2 = 0.8695 Kg cm / (sec/deg)
Calculate the maximum torque applied to the shaft with zero load.
Ί = k1 VR – k2 w
Ί = 2 (Kg cm / v) * 6 v – 0.8695 (Kg cm / (sec / deg)) (0.23 sec / 60 deg)
Ί = 12 (Kg cm) – 0.00333 (Kg cm)
Ί = 11.996 (Kg cm) 12 (Kg cm)
Figure 8 – Servo Motor, FS90MG

Table 4 - Specifications, FS90MG
Operating Voltage 6 v
No Load Speed 0.10 sec/60 deg
Stall Torque 1.8 Kg cm or 25.04 oz in
Operating Angle 180
Weight 14g
Size 23.2 x 12.5 x 22 mm
Control Protocol PWM
Cable Length 250 mm
Material Plastic Body and Metal Gears

Laplace Transforms
The translation of a system description into the language of mathematics is called modeling. Modeling is a
level of abstraction of the real world whereby the important aspects of a problem are isolated and the minor
ones are ignored. As a result simplicity with sufficient accuracy is obtained. It is important that engineers
understand how far the model deviates from the real world to minimize errors.
By performing a Laplace transform our time-based equations are converted to the s-domain where the
equations become linear algebraic equations. Time and frequency response of a feedback control system
are more readily obtained in the s-domain. Stability of the feedback control system to be modeled requires
that the roots of the characteristic equations reside to the left of the imaginary axis where the components
of the natural system response decay with time. When the roots of the characteristic equations reside on the
right side of the imaginary axis then the system may oscillate and grow in time causing potential damage.
In this case the system is considered unstable and it is not safe for operation.
The Laplace transform of a function is provided below. Refer to a Differential Calculus book for further
information performing various transforms.
𝐿[f (t)] = F(s)
𝐹(𝑠) = ∫ 𝑓 (𝑡) 𝑒−𝑠𝑡∞
0−
𝑑𝑡
Feedback Circuits
Figure 7 shows a block diagram of a basic electrical amplifier with negative feedback. The transfer
function T(s) = Y(s) / R(s) is the ratio between the output Y(s) and the input signal R(s).
R(s)+
A(s) Y(s)
H(s)
-
Figure 9 - Amplifier with negative feedback
Y(s) = R(s) A(s) – Y(s) H(s)
Y(s) + Y(s) H(s) = R(s) A(s)
Y(s) (1+ H(s)) = R(s) A(s)
Y(s) / R(s) = A(s) / (1+H(s)) where T(s) = Y(s) / R(s)
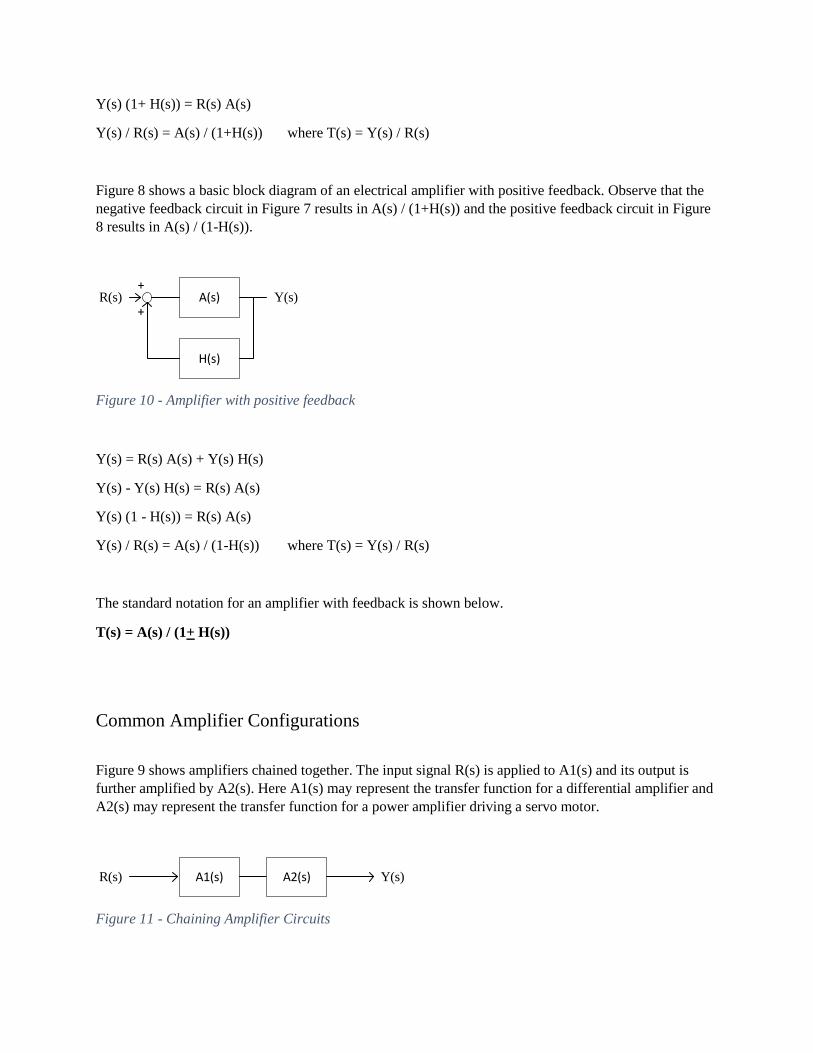
Figure 8 shows a basic block diagram of an electrical amplifier with positive feedback. Observe that the
negative feedback circuit in Figure 7 results in A(s) / (1+H(s)) and the positive feedback circuit in Figure
8 results in A(s) / (1-H(s)).
R(s)+
A(s) Y(s)
H(s)
+
Figure 10 - Amplifier with positive feedback
Y(s) = R(s) A(s) + Y(s) H(s)
Y(s) - Y(s) H(s) = R(s) A(s)
Y(s) (1 - H(s)) = R(s) A(s)
Y(s) / R(s) = A(s) / (1-H(s)) where T(s) = Y(s) / R(s)
The standard notation for an amplifier with feedback is shown below.
T(s) = A(s) / (1+ H(s))
Common Amplifier Configurations
Figure 9 shows amplifiers chained together. The input signal R(s) is applied to A1(s) and its output is
further amplified by A2(s). Here A1(s) may represent the transfer function for a differential amplifier and
A2(s) may represent the transfer function for a power amplifier driving a servo motor.
R(s) A1(s) Y(s)A2(s)
Figure 11 - Chaining Amplifier Circuits

Y(s) = R(s) A1(s) A2(s)
T(s) = (Y(s) / R(s)) (A1(s) A2(s)
R(s)
A1(s)
Y(s)
A2(s)
+
+
Figure 12 - Summing outputs of two amplifiers
Y(s) = R(s) A1(s) + R(s) A2(s)
T(s) = (Y(s) / R(s)) (A1(s) + A2(s))
Example:
Provide the transfer function for the diagram below.
A(s) = 10 / (s + 10)
R(s) A(s) Y(s)+ + -
-
Y(s) = (A(s) R(s) / (1 + A(s)) – R(s)
T(s) = Y(s) / R(s) = (A(s) / (1 + A(s)) -1
T(s) = (10 / (s + 10)) / (1 + (10 / (s + 10)) - ((s + 10) / (s + 10))
T(s) = -s / (s + 20)
Note:
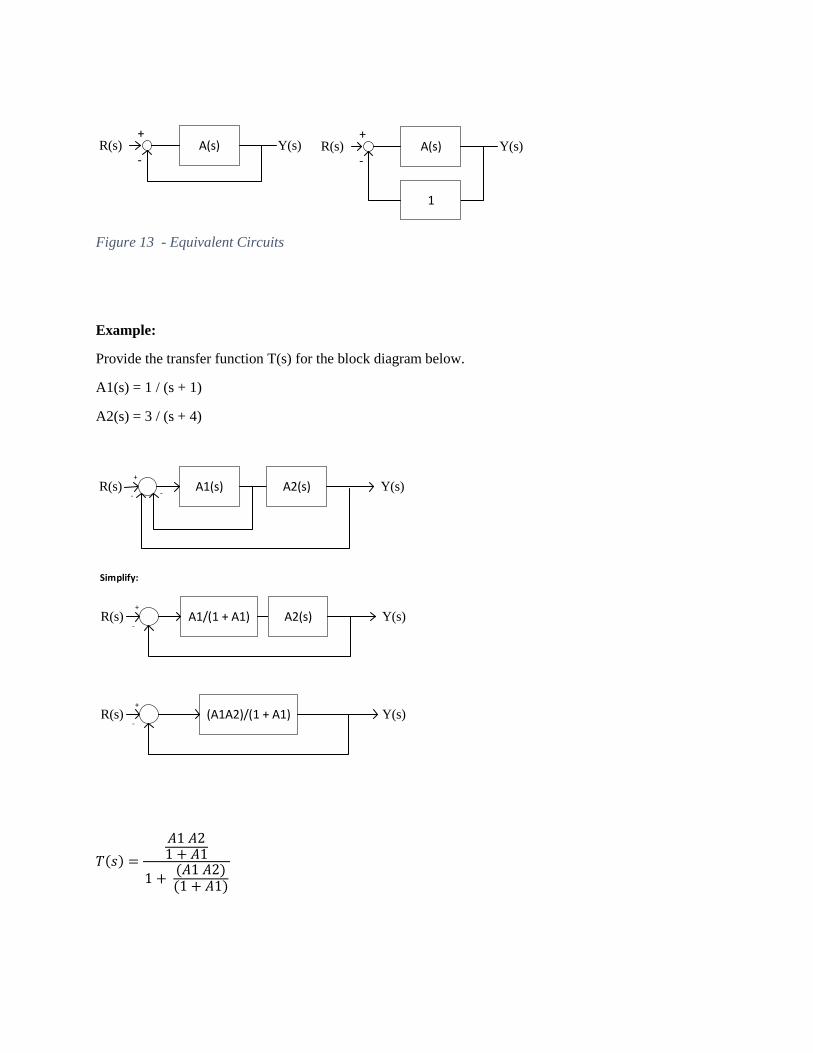
The diagrams in Figure 11 are equivalent and represent the basic amplifier with negative feedback.
R(s)+
A(s) Y(s)-
R(s)+
A(s) Y(s)-
1
Figure 13 - Equivalent Circuits
Example:
Provide the transfer function T(s) for the block diagram below.
A1(s) = 1 / (s + 1)
A2(s) = 3 / (s + 4)
R(s) A1(s) Y(s)A2(s)--
+
R(s) A1/(1 + A1) Y(s)A2(s)-
+
R(s) (A1A2)/(1 + A1) Y(s)-
+
Simplify:
𝑇(𝑠) =
𝐴1 𝐴21 + 𝐴1
1 + (𝐴1 𝐴2)(1 + 𝐴1)

𝑇(𝑠) =𝐴1 𝐴2
1 + 𝐴1 + 𝐴1 𝐴2
𝑇(𝑠) =
1𝑠 + 1
3𝑠 + 4
1 +1
𝑠 + 1 + (1
𝑠 + 1)(3
𝑠 + 4)
T(s) = 3 / (S2 + 6s + 11)

Servo Systems
Basic Servo System
A2A1+-
12 Vdc 12 Vdc
Angular Positioning
Angular Positioning Feedback
Servo Motor
Load
JDifferential Amplifier
Power Amplifier
Figure 14 - Basic Servo System
The input potentiometer provides the angular position to the differential amplifier. The output voltage of
the differential amplifier is also called the error voltage, and it is the difference between the input voltage
and the feedback voltage. A2 is a power amplifier designed to provide the necessary current to drive the
servo motor.
The output signal of A2 is given by
V2 = A1 A2 KP (r – Ø)
Where:
V2 = voltage applied to the servo motor
r = desired angular position
Ø = angular position of the motor shaft
Ί = k1 V2 – k2 w
Ί = k1 V2 – k2 dØ /dt
Ί = k1 A1 A2 KP (r – Ø) – k2 dØ /dt
Ί = J d2Ø /dt2 = k1 A1 A2 KP (r – Ø) – k2 dØ /dt

J d2Ø /dt2 + k2 dØ /dt + k1 A1 A2 KP Ø = k1 A1 A2 KP r(t)
Applying Laplace Transform gives
J s2Ø(s) + k2 s Ø(s) + k1 A1 A2 KP Ø(s) = k1 A1 A2 KP R(s)
𝑻(𝒔) = Ø(𝐬)
𝐑(𝐬)=
𝐤𝟏 𝐀𝟏 𝐀𝟐 𝑲𝑷
𝐉 𝒔𝟐 + 𝑲𝟐𝐬 + 𝐤𝟏 𝐀𝟏 𝐀𝟐 𝑲𝑷

Robotic Arm – Gripper with 5 Degree Freedom
The gripper robotic arm displayed in Figure 15 has 5 degree of freedom, which includes the rotational
platform, shoulder, elbow, wrist, and the gripper. The Cartesian coordinates and orientation are shown to
the right of the gripper. The rotational platform positions the robotic arm about the z axis. The shoulder,
elbow, and wrist rotate about the X axis. There is no positioning or orientation possible about the Y axis.
The Gripper movement is strictly an open and close action, and it is capable of holding up to a 50 gram
load.
For this particular design joysticks control the positioning of the robotic arm providing analog voltages to
the controller. The controller digitizes the voltages and generates an equivalent pulse width modulated
signal to the servos. A potentiometer provides an input voltage for opening and closing the gripper.
Figure 15 - Robotic Arm, 5 DOF
The block diagram and 4R Geometry for the robotic arm is displayed in Figure 16 and Figure 17
respectively. The robotic arm is comprised of four RG-SRV 180 servo motors and one FS90MG servo
motor. The FS90MG is a light weight servo motor and controls the gripper open and closing action. The
open and closing action is restricted to 0 to 150 degrees. The SRV 180 servo motors rotation is 0 to 180
degrees. The arm can physically extent up to 28.5 cm, measured from the shoulder axis to the endpoint.
When all servos are centered at 90 degrees then the shoulder aligns perfectly along the Z axis and the Elbow
and Wrist align perfectly along the Y axis, forming a 90 degree angle.
Each servo motor receives a pulse width modulated signal from the PWM output of the Arduino controller.
The SRV 180 servos turn fully counter-clockwise (0 degrees) with an input of 600ms, and fully clockwise
with an input of 2400ms (180 degrees). When powering up the robotic arm the controller will automatically
center each servo to 1500ms (90 degrees).

The 9g servo turns fully counter-clockwise (0 degrees) with an input of 900ms, and fully clockwise with
an input of 2100ms (180 degrees). 1500ms centers the servo at 90 degrees.
Each servo can be positioned in 1 microsecond (usec) increments which translates to 0.0001 degree per 1
usec.
Degrees per usec = 180 degrees / (2,400,000 – 600,000) usec or 0.0001 degree per 1 usec.
Servo MotorRotational Platform
Z – Axis0 .. 180 deg
Servo MotorShoulder X – Axis
0 .. 180 deg
Servo MotorElbow X-Axis
0 .. 180 deg
Servo MotorWristX-Axis
0 .. 180 deg
Servo MotorGripper
Open/Close0 .. 150 deg
Controller
PWM 5
PC
USB
USB
Analog Controls
SW 1 … SW 5
PWM 4PWM 3
PWM 2PWM 1
Figure 16 - Robotic Arm, 5 DOF
Z Axis
X Axis
Angular PositionAbout Z Axis
Shoulder
Elbow
Wrist
Gripper
Figure 17 - 4R Geometry

Robotic Arm – 6 Degree Freedom
Figure 18 shows a physical view of the robotic arm with the laser mounted as an endpoint. Figure 19 and
Figure 20 show the associated block diagram and physical dimensions of the links, respectively.
Figure 18 - Robotic Arm 6 DOF and Laser Endpoint
Servo MotorRotational Position
Z – Axis0 .. 180 deg
Servo MotorShoulder - Position
X – Axis0 .. 180 deg
Servo MotorElbow - Position
X-Axis0 .. 180 deg
Servo MotorWrist Orientation
Y-Axis0 .. 180 deg
Servo MotorWrist Orientation
X-Axis0 .. 180 deg
PWM 5
PC
USB
Analog Controls
SW 1 … SW 5
PWM 4PWM 3
PWM 2PWM 1
Servo MotorWrist Orientation
Z-Axis0 .. 180 deg
PWM 6
Laser420 nm
(red)
Controller
USB
DIO 3
Figure 19 - Robotic Arm, 6 DOF

Base
25.4 mm1.00 inch
90.07 mm3.54 inch
Shoulder
Elbow
33.53 mm1.32 inch
Y axisPosition
86.44 mm3.40 inch
X axisPosition
35.56 mm1.40 inch
Z axisPosition
60.74 mm2.39 inch
15.00 mm0.59 inch
LaserEnd Point
40.00 mm1.60 inch
Ground Plane
67.96 mm2.67 inch
Z axis
Y axisBase Offset
Figure 20 - Robotic Laser Arm Dimensions

Rotation Kinematics
Read Theory of Applied Robotics, Chapter 2
Read Theory of Applied Robotics, Chapter 3
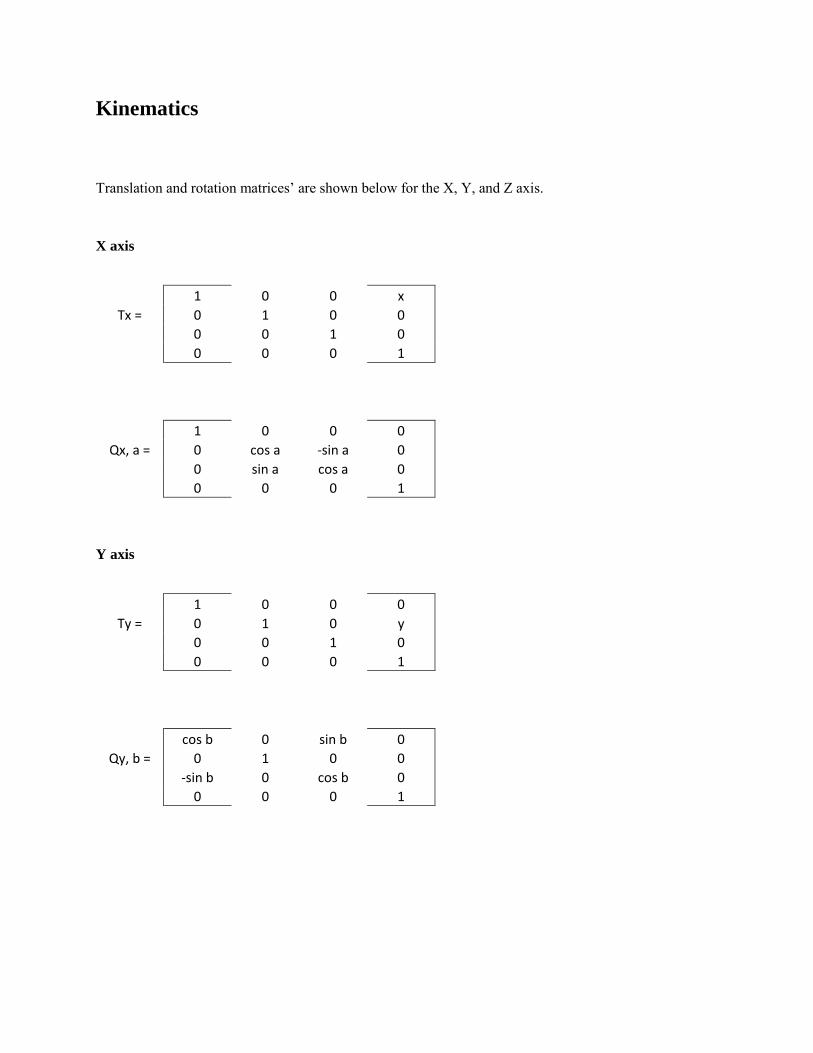
Kinematics
Translation and rotation matrices’ are shown below for the X, Y, and Z axis.
X axis
1 0 0 x
Tx = 0 1 0 0
0 0 1 0
0 0 0 1
1 0 0 0
Qx, a = 0 cos a -sin a 0
0 sin a cos a 0
0 0 0 1
Y axis
1 0 0 0
Ty = 0 1 0 y
0 0 1 0
0 0 0 1
cos b 0 sin b 0
Qy, b = 0 1 0 0
-sin b 0 cos b 0
0 0 0 1

Z axis
1 0 0 0
Tz = 0 1 0 0
0 0 1 z
0 0 0 1
cos c -sin c 0 0
Qz, c = sin c cos c 0 0
0 0 1 0
0 0 0 1
The translation matrices can be combined into one translation matrix Txyz.
Tx Ty Tz
1 0 0 x 1 0 0 0 1 0 0 0
0 1 0 0 0 1 0 y 0 1 0 0
0 0 1 0 0 0 1 0 0 0 1 z
0 0 0 1 0 0 0 1 0 0 0 1
T xyz
1 0 0 x
0 1 0 y
0 0 1 z
0 0 0 1

Example:
The endpoints of a plane along the x-y axis are given below.
Z
X
Y
Points:
Pt1 Pt2 Pt3 Pt4
X 0 0 10 10
y 0 20 0 20
z 0 0 0 0
1 1 1 1
Rotate the points 30 degrees about the Z axis and then translate them two units along the Z axis.
Translation Rotation Points
Pt1 Pt2 Pt3 Pt4
1 0 0 2 cos 30 -sin 30 0 0 0 0 10 10
0 1 0 2 sin 30 cos 30 0 0 0 20 0 20
0 0 1 2 0 0 1 0 0 0 0 0
0 0 0 1 0 0 0 1 1 1 1 1
Translation Points
Pt1 Pt2 Pt3 Pt4
1 0 0 2 0 -10.00 8.66 -1.34
0 1 0 2 0 17.32 5.00 22.32
0 0 1 2 0 0.00 0.00 0.00
0 0 0 1 1 1 1 1

New point positions after rotation and translation.
Pt1 Pt2 Pt3 Pt4
2.00 -8.00 10.66 0.66
2.00 19.32 7.00 2.00
2.00 2.00 2.00 2.00
1 1 1 1
Rotation about Z axis
The translation and rotation matrices for any point x, y, or z can be simplified by combining them into
one matrix.
T+ Rotation Z T- P
1 0 0 x cos 30 -sin 30 0 0 1 0 0 -x x
0 1 0 y sin 30 cos 30 0 0 0 1 0 -y y
0 0 1 z 0 0 1 0 0 0 1 -z z
0 0 0 1 0 0 0 1 0 0 0 1 1
Rotation Z P
cos 30 -sin 30 0 -x cos('z) + y sin('z) +x x
sin 30 cos 30 0 -x sin('z) – y cos('z) +y y
0 0 1 0 z
0 0 0 1 1

Forward Kinematics
Read Theory of Applied Robotics, Chapter 5

Inverse Kinematics
Read Theory of Applied Robotics, Chapter 6

Software and Sketches
Structure
setup()
The setup() function is called when a sketch starts. It is used to initialize variables, pin modes,
libraries, etc. The setup function will only run once, after each power up or reset of the Arduino
board. Connecting the USB cable to the development environment causes the controller to reset.
loop()
After creating a setup() function, the loop() function does precisely what its name suggests, and
loops consecutively, allowing your program to change and respond. Use it to actively control the
Arduino board.
Control Structures if
if...else
for
switch case
while
do... while
break
continue
return
goto
Further Syntax ; (semicolon)
{} (curly braces)
// (single line comment)
/* */ (multi-line comment)
#define
#include
Arithmetic Operators = (assignment operator)
+ (addition)
- (subtraction)

* (multiplication)
/ (division)
% (modulo)\
Comparison Operators == (equal to)
!= (not equal to)
< (less than)
> (greater than)
<= (less than or equal to)
>= (greater than or equal to)
Boolean Operators && (and)
|| (or)
! (not)
Pointer Access Operators * dereference operator
& reference operator
Bitwise Operators & (bitwise and)
| (bitwise or)
^ (bitwise xor)
~ (bitwise not)
<< (bitshift left)
>> (bitshift right)
Compound Operators ++ (increment)
-- (decrement)

+= (compound addition)
-= (compound subtraction)
*= (compound multiplication)
/= (compound division)
&= (compound bitwise and)
|= (compound bitwise or)
Variables
Constants HIGH | LOW
INPUT | OUTPUT | INPUT_PULLUP
LED_BUILTIN
true | false
integer constants
floating point constants
Data Types void
boolean
char
unsigned char
byte
int
unsigned int
word
long
unsigned long
short
float

double
string - char array
String - object
array
Conversion char()
byte()
int()
word()
long()
float()
Variable Scope & Qualifiers variable scope
static
volatile
const
Utilities sizeof()
PROGMEM
Functions
Digital I/O pinMode()
digitalWrite()
digitalRead()

Analog I/O analogReference()
Configures the reference voltage used for analog input (i.e. the value used as the top of the input
range). The options are:
DEFAULT: the default analog reference of 5 volts (on 5V Arduino boards) or 3.3 volts (on 3.3V
Arduino boards)
INTERNAL: a built-in reference, equal to 1.1 volts on the ATmega168 or ATmega328 and 2.56
volts on the ATmega8 (not available on the Arduino Mega)
INTERNAL1V1: a built-in 1.1V reference (Arduino Mega only)
INTERNAL2V56: a built-in 2.56V reference (Arduino Mega only)
EXTERNAL: the voltage applied to the AREF pin (0 to 5V only) is used as the reference.
analogRead()
analogWrite() – PWM
Due & Zero only analogReadResolution()
analogWriteResolution()
Advanced I/O tone()
noTone()
shiftOut()
shiftIn()
pulseIn()
Time millis()
micros()
delay()
delayMicroseconds()

Math min()
max()
abs()
constrain()
map()
pow()
sqrt()
Trigonometry sin()
cos()
tan()
Random Numbers randomSeed()
random()
Bits and Bytes lowByte()
highByte()
bitRead()
bitWrite()
bitSet()
bitClear()
bit()
External Interrupts attachInterrupt()
detachInterrupt()

Interrupts interrupts()
noInterrupts()
Communication Serial
Stream
USB (32u4 based boards and Due/Zero only) Keyboard
Mouse