Embed Size (px)
Citation preview

Robotics, Geometry and Control
Robotics, Geometry and Control - DifferentialGeometry
Ravi Banavar1
1Systems and Control EngineeringIIT Bombay
HYCON-EECI Graduate School - Spring 2008

Robotics, Geometry and Control
Differentiable geometry
The material for these slides is largely taken from the texts
I Calculus on manifolds - Vol. 1, by M. Spivak, published by W. A.Benjamin, Inc., New York, 1965.
I Topology, geometry and gauge fields - Vol. 1 - by G. L. Naber,Springer, New York, 1998.
I Ordinary Differential Equations - V. I. Arnold, Springer
I Mechanics and Symmetry - J. E. Marsden and T. Ratiu, Springer,1994

Robotics, Geometry and Control
Geometry
Introduction
I The study of differential geometry in our context is motivated bythe need to study dynamical systems that evolve on spaces otherthan the usual Euclidean space.
I Single pendulum. double pendulum
I DefinitionA manifold is a topological space M with the following property. Forany x ∈ M, there exists a neighbourhood B of x which ishomeomorphic to Rn (for some fixed n ≥ 0). (We shall need more -”smooth” manifolds)

Robotics, Geometry and Control
Geometry
Charts and atlases
I We start with a topological space X and a positive integer n
I An n-dimensional chart on X is a pair (U, φ) where U is openand φ is a homeomorphism
I X is said to be locally Euclidean if there exists a positive integern such that for each x ∈ X , there is an n-dimensional chart (U, φ)
on X with x ∈ U
I Two charts (U1, φ1) and (U2, φ2) and U1⋂
U2 6= 0 then φ1 ◦ φ−12
and φ1 ◦ φ−12 are homeomorphisms
I If both are C∞ then the two charts are C∞ -related
I An atlas of dimension n on X is a collection {(Uα, φα)}α∈A ofn-dimensional charts on X , any two of which are C∞-related andsuch that
⋃α∈A Uα = X

Robotics, Geometry and Control
Geometry
I A maximal atlas contains every chart on X that is admissible to it- or whenever (U, φ) is a chart on X that is C∞-related to every(Uα, φα), α ∈ A, then there exists an α0 ∈ A such that U = Uα0
and φ = φα0
I Example: The charts (US, φS) and (UN , φN) together form anatlas on S1.
I Consider the standard atlas on R. Now consider the chart((−π/2, π/2), tan). Is this admissible ? How about (R, φ) whereφ(x) = x3 ?
I A maximal n-dimensional atlas for a topological manifold X iscalled a differentiable structure on X and a topologicalmanifold together with some differentiable structure is called adifferentiable or smooth or C∞ manifold.

Robotics, Geometry and Control
Geometry
A circle
I A circle S1 - subset of R2
I Consider US = S1 − {N} and UN = S1 − {S}I Map φs : US → R (homeomorphism ?)
φs(x1, x2) =x1
1− x2 φ−1s (y) = (
2yy2 + 1
,y2 − 1y2 + 1
)
I φN : UN → R
φN(x1, x2) =x1
1 + x2 φ−1N (y) = (
2yy2 + 1
,−y2 + 1y2 + 1
)
I UN⋂
US = S1 − {N,S}I φS ◦ φ−1
N (y) = y−1 = φN ◦ φ−1S (y)

Robotics, Geometry and Control
Geometry
A sphere
I
I A sphere S2 - subset of R3
I Consider US = S2 − {N} and UN = S2 − {S}I Map φs : US → R (homeomorphism ?)
φs(x1, x2, x3) = (x1
1− x3 ,x2
1− x3 ) φN(x1, x2, x3) = (x1
1 + x3 ,x2
1 + x3 )
I φ−1s : R2 → US
φ−1s (y) =
1
(1 + ‖y‖2)(2y1,2y2, ‖y‖2 − 1)

Robotics, Geometry and Control
Geometry
R22
!2
!1 R12
S
N
x "
!
!
"
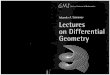
Figure: An atlas for a sphere and a torus

Robotics, Geometry and Control
Geometry
Other examples of smooth manifolds
I Any nonempty open subset of IRn
I M(n) = {n × n real matrices} = Rn2
I GL(n) = {n × n real, invertible matrices}
I Sn - a sphere in n + 1 dimensional Euclidean space

Robotics, Geometry and Control
Geometry
Coordinates
I Charts assign an n-tuple of reals to an element on the manifold
I Choosing a basis for IRn, one could assign coordinates to thesen-tuples
I So we introduce the notion of coordinate functions x 4= (x1, . . . , xn).
I The i th coordinate of a point p on the manifold is x i (φ(p)) : X → R
I Coordinate function x i ◦ φ : U → R
I We could choose another set of coordinates as well - say y
I Sometimes we skip φ and talk directly of x (the coordinate function)as a map from U to IRn.

Robotics, Geometry and Control
Geometry
Change of coordinates - chain rule
I How do we move from one coordinate system to another ?
I Consider a smooth function f (·) : X → IR and consider two coordinatesystems x and y .
f ◦ x−1 = f ◦ y−1 ◦ y ◦ x−1
I Then the partial derivative of f (·) with respect to x j (the jth partial inthe x coordinate system) is given by
Dj (f ◦ x−1) = Dj (f ◦ y−1 ◦ y ◦ x−1) = Dk (f ◦ y−1) · Dkj (y ◦ x−1)
I Note
f ◦ y−1 : IRn → IR y ◦ x−1 : IRn → IRn

Robotics, Geometry and Control
Geometry
Change of coordinates - example
I Think of the Cartesian plane and two coordinate systems (x , y) and(r , θ).
I Now x = r cos θ and y = r sin θ
I Compute ∂f∂x and ∂f
∂y with the chain rule mentioned in the last slide.

Robotics, Geometry and Control
Geometry
A submanifold
DefinitionA subset X ′ of an n-dimensional smooth manifold X will be called ak-dimensional submanifold of X if for for each p ∈ X ′ there exists achart (U, φ) of X at p such that φ|U
⋂X ′ onto an open set is some
copy of IRk in IRn.
I Is the unit circle a submanifold of IR2 ?
I Is the set of real-symmetric n × n matrices a submanifold of IRn×n ?

Robotics, Geometry and Control
Geometry
Differentiable functions
I F : X → R is C∞ on X , if, for every chart (U, φ) in the differentiablestructure for X , the coordinate expression F ◦ φ−1 is a C∞ real-valued function on the open subset φ(U) of Rn.
I A bijection F : X → Y for which both F and F−1 : Y → X are C∞ iscalled a diffeomorphism

Robotics, Geometry and Control
Geometry
Tangent vectors
I Two curves c1 : IR ⊃ (−a,a)→ X and c2 : (−a,a) ⊃ IR → X in X arecalled equivalent at p if
c1(0) = c2(0) = p (φ ◦ c1)′(0) = (φ ◦ c2)′(0)
in some chart (U, φ).
I An equivalence class [c(·)] where c(0) = p is called a tangent vectorto X at p.
I The set of all tangent vectors at p is called the tangent space at p andis denoted by TpX .
I Identify TpX with Tφ(p)IRn.

Robotics, Geometry and Control
Geometry
Tangent bundle
I The disjoint union of all tangent spaces to a manifold forms thetangent bundle.
TX =⋃
p∈X
TpX
I TX has a smooth manifold structure (an atlas for X induces an atlasfor TX .)
I Call π : TX → X the canonical projection defined by
vp → p ∀vp ∈ TpX
I If {(Uα, φα)} is an atlas for X , then {(π−1(Uα),Dφα)}is an atlas forTX .

Robotics, Geometry and Control
Geometry
Vector fields
I A vector field on a smooth manifold X is a map V that assigns toeach p ∈ X a tangent vector V(p) in Tp(X ).
I If this assignment is smooth, the vector field is called smooth or C∞.
I The collection of all C∞ vector fields on a manifold X denoted byX (X ) is endowed with an algebraic structure as follows: LetV,W ∈ X (X ), a ∈ R and f ∈ C∞(X )
I V + W(p) = V(p) + W(p) (∈ X (X ))
I a(V)(p) = aV(p) (∈ X (X ))
I (fV)(p) = f (p)V(p) (∈ X (X ))

Robotics, Geometry and Control
Geometry
An alternate viewpoint of tangent vectorsI A tangent vector v to a point p on a surface will assign to every
smooth real-valued function f on the surface a “directional derivative”v(f ) = 5f (p) · v.
I Draw a curve α(.) : M = R→ R on the plane. Let α ∈ C∞. Considerdα(t)
dt |t=p. What is this expression ? It takes a curve α(∈ C∞) to thereals at a point p.
I A tangent vector (derivation) to a differentiable manifold X at apoint p is a real-valued function v: C∞ → R that satisfies
I (Linearity) v(af + bg) = a v(f) + b v(g)I (Leibnitz Product Rule) v(fg) = f (p)v(g) + v(f )g(p) for all
f , g ∈ C∞(X ) and all a, b ∈ R
I The set of all tangent vectors to X at p is called the tangent space toX at p and denoted Tp(X ).

Robotics, Geometry and Control
Geometry
An alternate viewpoint of vector fields
I A vector field X on a differentiable manifold X is a linear operatorthat maps smooth functions to smooth functions. Mathematically
X : C∞(X )→ C∞(X )

Robotics, Geometry and Control
Geometry
Integral curve
DefinitionLet V be a smooth vector field on the manifold X . A smooth curveα : I → X in X is an integral curve for V if its velocity vector at eachpoint coincides with the vector assigned to that point
dαdt
= V(α(t))

Robotics, Geometry and Control
Geometry
Maximal integral curve
TheoremLet V be a smooth vector field on the manifold X and p a point in X.Then there exists an interval (a(p),b(p)) ∈ IR and a smooth curveαp : (a(p),b(p))→ X such that
I 0 ∈ (a(p),b(p)) and αp(0) = p.
I αp is an integral curve for V.
I If (c,d) is an interval containing 0 and β : (c,d)→ X is an integralcurve for V with β(0) = p, then (c,d) ⊂ (a(p),b(p)) andβ = αp|(c,d). Thus, αp is called the maximal integral curve of Vthrough p at t = 0.

Robotics, Geometry and Control
Geometry
Maps between manifolds and ”the linearapproximation”
Consider a smooth map f : X → Y . At each p ∈ X we define a lineartransformation
f∗p : Tp(X )→ Tf (p)(Y )
called the derivative of f at p, which is intended to serve as a ”linearapproximation to f near p,” defined as
I For each v ∈ Tp(X ) we define f∗p(v) to be the operator on C∞(f (p))
defined by (f∗p(v))(g) = v(g ◦ f ) for all g ∈ C∞(f (p)).
Lemma(Chain Rule) Let f : X → Y and g : Y → Z be smooth maps betweendifferentiable manifolds. Then g ◦ f : X → Z is smooth and for everyp ∈ X
(g ◦ f )∗p = g∗f (p) ◦ f∗p

Robotics, Geometry and Control
Geometry
An alternate viewpoint of maps between manifoldsThe derivative of f at p could be constructed as follows. Once againf (·) : X → Y . (The notation f∗p is now changed to Tpf .)
I Choose a parametrized curve c(·) : (−ε, ε)→ X with c(0) = p andc(0) = vp.
I Construct the curve f ◦ c. Then define
Tpf · vp =ddt|t=0(f ◦ c)(t)
I With coordinates, we have
Tx(p)(y ◦ f ◦ x−1) =∂
∂x j (y ◦ f ◦ x−1)|x(p) The Jacobian at x(p)
I The rank of f at p is the rank of the Jacobian matrix at x(p) and this isindependent of the choice of the charts

Robotics, Geometry and Control
Geometry
Immersions, submersions
I If f : X → Y is smooth, then if
1. If Tpf is onto for all p ∈ X , then f is called a submersion
2. If Tpf is one-to-one for all p ∈ X , then f is called a immersion
3. If f is an immersion and one-to-one, then f (X ) is an immersedsubmanifold
I Examples

Robotics, Geometry and Control
Geometry
Critical points and regular points
Consider a smooth map f : X → Y
I A point p ∈ X is called a critical point of f if Tpf is not onto.
I A point p ∈ X is called a regular point of f if Tpf is onto.
I A point y ∈ Y is called a critical value if f−1(y) contains a criticalpoint. Otherwise, y is called a regular value of f .

Robotics, Geometry and Control
Geometry
Submersion theorem
TheoremIf f : X n → Y k is a smooth map, and y ∈ f (X ) ⊂ Y is a regular valueof f , then f−1(y) is a regular submanifold of X of dimension n − k.
I Example: f (x , y) = x2 + y2 − 1. Take f−1(0).
I Show that O(n) = {A ∈ Mn(IR)|AT A = I} is a submanifold of Mn(IR).What is its dimension ?Hint: Consider a map f : IRn×n → Sn×n (symmetric matrices). Letf (A) = AT A and examine the value I.

Robotics, Geometry and Control
Geometry
The cotangent space
DefinitionFor any f ∈ C∞(p) we define an operator df (p) = dfp : Tp(X )→ IRcalled the differential of f at p by
df (p)(v) = dfp(v) = v(f )
for every v ∈ Tp(X ). Since dfp is linear, it is an element of the dualspace of Tp(X ) called the cotangent space of X at p and denoted byT ∗p (X )
I basis - { ∂∂x i } and dual basis {dx i}

Robotics, Geometry and Control
Geometry
Cotangent bundle
I The disjoint union of all cotangent spaces to a manifold forms thecotangent bundle.
T ∗X =⋃
p∈X
T ∗p X
I T ∗X has a smooth manifold structure (an atlas for X induces an atlasfor T ∗X .)
I Call π : T ∗X → X the canonical projection defined by
vp → p ∀vp ∈ T ∗p X
I If {(Uα, φα)} is an atlas for X , then {(π−1(Uα), )}is an atlas for T ∗X .

Robotics, Geometry and Control
Geometry
One-forms
A one -form on a smooth manifold X is a smooth map α(·) thatassigns to each p ∈ X a cotangent vector α(p) in T ∗p X

Robotics, Geometry and Control
Geometry
Pull-back and push-forward of vector fields
I Suppose f : X → Y is a diffeomorphism, then f∗ : X (X )→ X (Y ) thepush-forward of a vector field on X is given by
(f∗V )(q) = Tf−1(q)f · V (f−1(q)) ∀q ∈ Y ,V ∈ X (X )
I Suppose f : X → Y is a diffeomorphism, then f ∗ : X (Y )→ X (X ) thepull-back of a vector field on Y is given by
(f ∗V )(p) = Tf (p)f−1 · V (f (p)) ∀p ∈ X ,V ∈ X (Y )

Robotics, Geometry and Control
Geometry
The Lie bracketDefinitionThe Lie bracket of two vector fields on a smooth manifold X is definedas
[·, ·] : X × Y → Z [P,Q]4= PQ −QP
where for f ∈ C∞(X )
[P,Q](f ) = P(Q(f ))−Q(P(f ))
Properties of the Lie bracket
I [X ,Y ] = −[Y ,X ]
I [X + Y ,Z ] = [X ,Z ] + [Y ,Z ]
I [fX ,gY ] = f · (X (g))Y − g(Y (f )) + f .g.[X ,Y ]
I [X , [Y ,Z ]] + [Y , [Z ,X ]] + [Z , [X ,Y ]] = 0

Robotics, Geometry and Control
Geometry
A Lie groupDefinitionA smooth manifold G together with a group structure is called a Liegroup if the group operation is smooth.
(g,h)→ g · h is smooth
I The identity element of the Lie group is usually denoted by e.
I Left translation of a group
Lg : G→ G h→ gh
I Right translation of a group
Rg : G→ G h→ hg

Robotics, Geometry and Control
Geometry
Examples of Lie groups
I IR or multiple copies of IR (as IRn.).
I The unit circle S1 or multiple copies of S1 (as S1 × . . .× S1).
I The set of n × n matrices with real entries.
I The set of n × n real-orthogonal matrices O(n).
I The set of n × n real-rotation matrices SO(n).

Robotics, Geometry and Control
Geometry
The Lie algebra
I The Lie bracket on TeG is given by
[ξ, η] = [Xξ,Xη] bracket of vector fields
I The vector space TeG with the [·, ·] is called the Lie algebra of G andis denoted by g.

Robotics, Geometry and Control
Geometry
Invariant vector fields
DefinitionA vector field V on a Lie group G is said to be left invariant if ∀g ∈ G
ThLg · X (h) = X (gh) OR Lg∗V = V
Some properties
I For X ,Y ∈ XL(G)⇒ [X ,Y ] ∈ XL(G).
I Identify XL(G) with TeG.

Robotics, Geometry and Control
Geometry
Exponential maps
I The ”exponential map” maps a Lie algebra to the Lie group
exp : g→ G η → exp(η) = γη(1)
where γη(t) is the integral curve of Xη ∈ XL(G) with γη(0) = e.
I The exponential map is a diffeomorphism from a neighbourhood of 0in g onto a nbhd of e in G.
I Recall linear systems and the solution of x = Ax . We haveγA(t) = eAt . Can you make a connection ?

Robotics, Geometry and Control
Geometry
Group actions
A (left) action of a Lie group G on a manifold M is a smooth map
Φ : G ×M → M
such that Φ(e, x) = x∀x ∈ MΦ(g, Φ(h, x)) = Φ(gh, x)∀g, h ∈ G, x ∈ M
III Examples: 1. Action of SO(3) on IR3. 2. Action of a group on itself

Robotics, Geometry and Control
Geometry
Adjoint and co-adjoint actions
I Defineig : G→ G ig = Rg−1 ◦ Lg
I Adjoint action of G on g
Adg : g→ g Adg(η) = Teig(η)
I Co-adjoint action
Ad∗g : g∗ → g∗ [Ad∗g (α), η] = [α,Adgη]

Robotics, Geometry and Control
Geometry
Orbits
I Say G acts on M. The orbit of x ∈ M is defined by
G · x = {g · x ∈ M|g ∈ G}