Embed Size (px)
Citation preview
JU –
2021
/HL
University of Stavanger
uis.no
DMS6021 Dynamics and control of mechanical systems Hirpa G. Lemu, PhD
Professor of Mechanical Design Engineering, Faculty of Science and Technology, University of Stavanger, Norway
Home page: www.ux.uis.no/~Hirpa; E-mail: [email protected]
1
5/10/21
Review of Dynamics of Rigid Bodies

JU –
2021
/HL
2
Content
Focus on4 Review of dynamics of rigid bodies4 Euler equations,4 Application to motion of symmetric tops and
gyroscopes and problems of system of bodies (self reading).
DMS6021 - Dynamics and Control of Mechanical Systems

JU –
2021
/HL
3
Introduction
The dynamics of rigid bodies can be analyzed as4 Rotation about a fixed point
OR4 General 3D motion (about center of mass of the body)
DMS6021 - Dynamics and Control of Mechanical Systems
å
å
=
W+=
=
)(fixed)body (not coordinate
secondary aabout rotating If
iiiO
OO
OO
rxmxrwhere
xdtddtd
wH
HH
HM
å
å
=
W+=
=
)( iii RxmxRwhere
xdtddtd
wH
HH
HM

JU –
2021
/HL
4
Dynamics of rigid body4 For a moving coordinate system x-y-z with angular
velocity Ω, the moment relation becomes:
DMS6021 - Dynamics and Control of Mechanical Systems
( )( )
!"#$$$ !$$$ "#%%%
%
HH
HHHH
HHM
ofdirectioninChange
ofmagnitudeinChange
zyx
xyz
xkji
x
W+++=
W+=å
where
Show that this is correct!

JU –
2021
/HL
5
Euler’s Equations
DMS6021 - Dynamics and Control of Mechanical Systems
4 For reference axes coinciding with the principal axes ofinertia
The origin can be either at the mass center (C) or at a point O fixedto the body and fixed in spaceThe products of inertia: Ixy = Iyz = Ixz = 0Thus, the moment equation becomes
JU –
2021
/HL
6
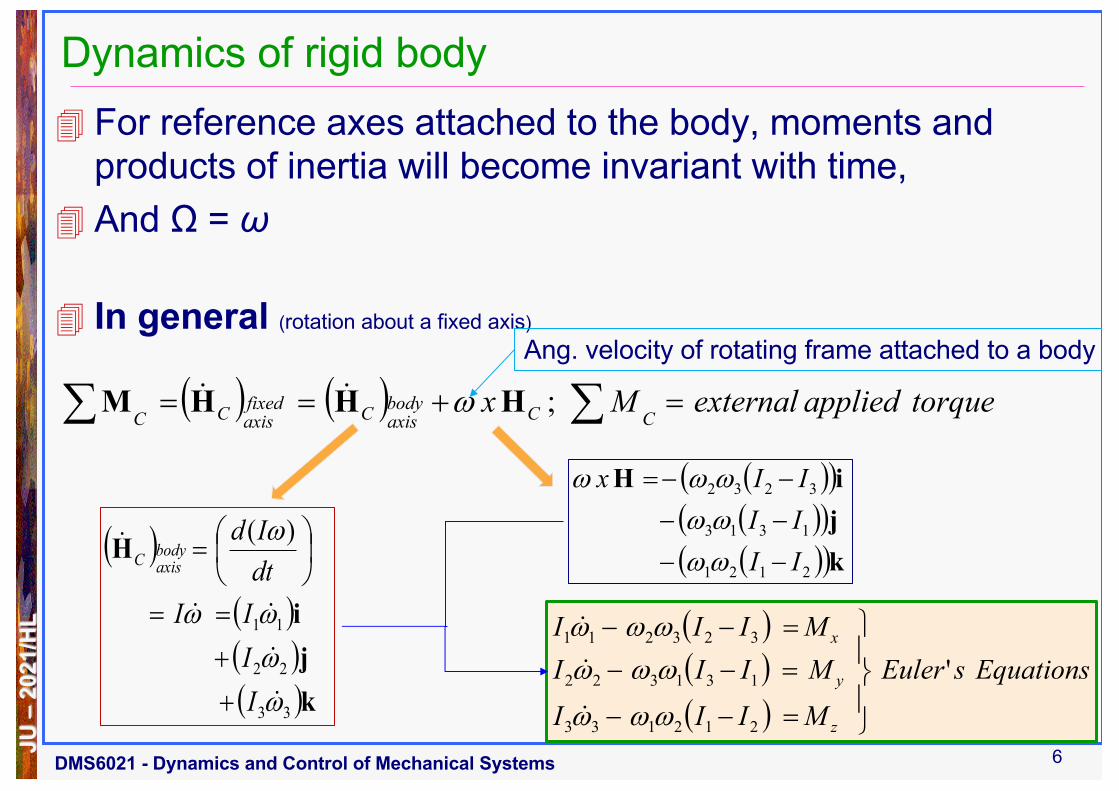
Dynamics of rigid body4 For reference axes attached to the body, moments and
products of inertia will become invariant with time, 4 And Ω = ω
4 In general (rotation about a fixed axis)
DMS6021 - Dynamics and Control of Mechanical Systems
( ) ( ) torqueappliedexternalMxCCaxis
bodyCaxisfixedCC
=+== åå ;HHHM w!!
( )( )( )( )k
ji
H
33
22
11
)(
wwww
w
!
!
!!
!
IIIIdtId
axisbodyC
++==
÷øö
çèæ=
( )( )( )( )( )( )k
jiH
2121
1313
3232
IIIIIIx
------=
wwwwwww
( )( )( )
EquationssEulerMIIIMIIIMIII
z
y
x
'
212133
131322
323211
ïþ
ïý
ü
=--
=--=--
www
wwwwww
!
!
!
Ang. velocity of rotating frame attached to a body
JU –
2021
/HL
7
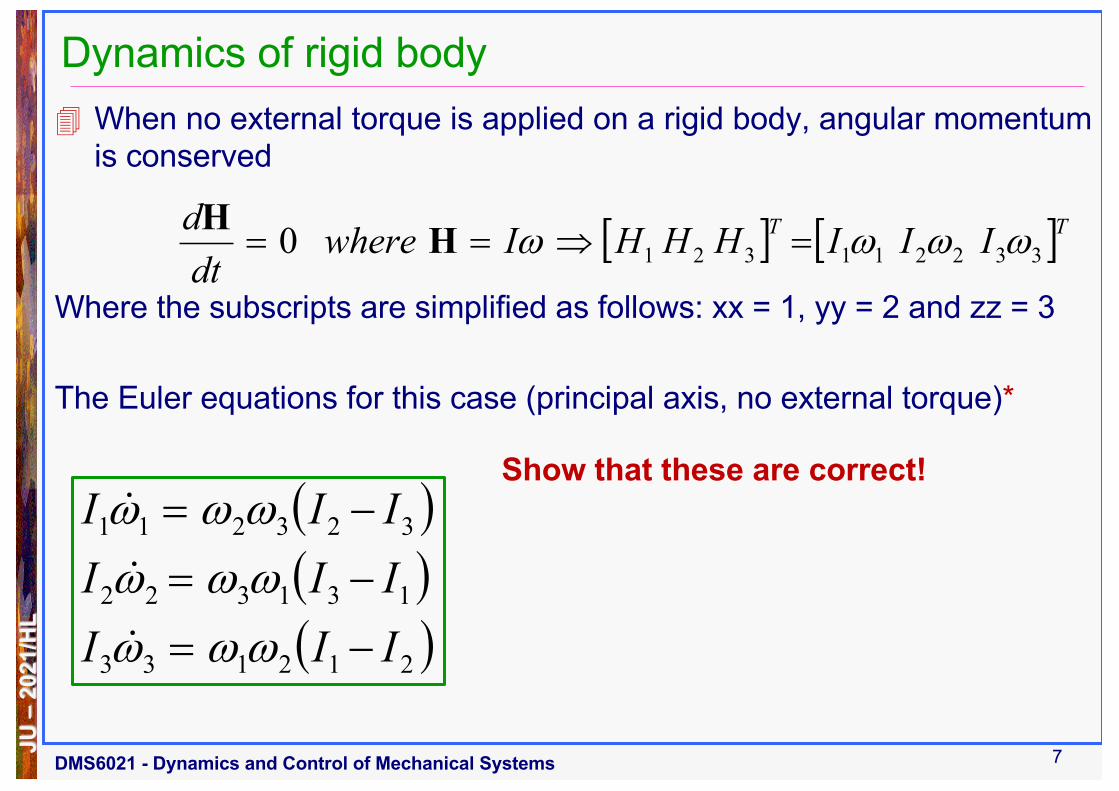
Dynamics of rigid body4 When no external torque is applied on a rigid body, angular momentum
is conserved
Where the subscripts are simplified as follows: xx = 1, yy = 2 and zz = 3
The Euler equations for this case (principal axis, no external torque)*
DMS6021 - Dynamics and Control of Mechanical Systems
[ ] [ ]TT IIIHHHIwheredtd
3322113210 wwww =Þ== HH
( )( )( )212133
131322
323211
IIIIIIIII
-=-=-=
wwwwwwwww
!
!
!Show that these are correct!

JU –
2021
/HL
8
Dynamics of rigid body… Euler Equations4 Euler’s equations are the 3D equations of motion for a rigid body -
used to analyze the motion of a rigid body
4 Using the three components of Newton’s 2nd law and Euler equations,motion of a rigid body in 3D is completely defined
DMS6021 - Dynamics and Control of Mechanical Systems
4 Three steps of rigid body analysis using Euler equations:
1. Choose a coordinate system (that rotates about a fixed point O orthat has its origin at the center of mass)
2. Draw the free body diagram3. Apply the equations of motion (Newton’s second law and equations
of angular motion)

JU –
2021
/HL
9
Dynamics of rigid body… Euler Equations4 Please read and try to understand about (Not pensum)Application of the relations of rigid body motion to
motion of symmetric tops andgyroscopes
DMS6021 - Dynamics and Control of Mechanical Systems
JU –
2021
/HL
10
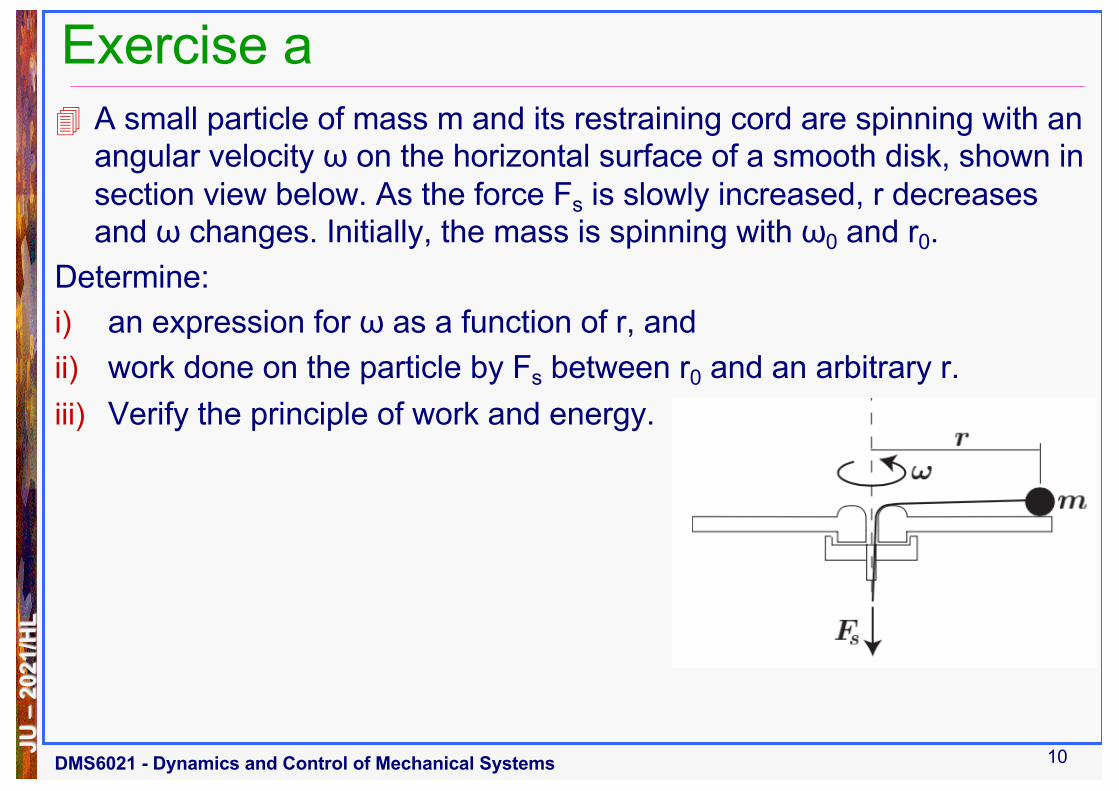
Exercise a4 A small particle of mass m and its restraining cord are spinning with an
angular velocity ω on the horizontal surface of a smooth disk, shown in section view below. As the force Fs is slowly increased, r decreases and ω changes. Initially, the mass is spinning with ω0 and r0.
Determine: i) an expression for ω as a function of r, and ii) work done on the particle by Fs between r0 and an arbitrary r.iii) Verify the principle of work and energy.
DMS6021 - Dynamics and Control of Mechanical Systems

JU –
2021
/HL
11
Exercise b4 A pendulum consisting of a mass, M, is suspended by a rigid rod of
length L. The pendulum is initially at rest and the mass of the rod can be neglected. A bullet of mass m and velocity v0 impacts M and stays embedded in it. The angle that the velocity vector v0 forms with the horizontal is α.
Find out the angle θmax reached by the pendulum.
DMS6021 - Dynamics and Control of Mechanical Systems
JU –
2021
/HL
12
Summary and Questions
DMS6021 - Dynamics and Control of Mechanical Systems
Next: Kinetic energy of a rigid body, virtual displacement and classification of constraints
4 Considered dynamics of rigid bodyRotation about a fixed axisRotation about the center of massMoment equation for a moving coordinate system
4 Derived Euler´s Equations formotion with moving coordinate systema coordinate system attached to the rotating bodycases when no external torque is applied andcases when the axis of rotation coincides with the principal axes ofinertia
?





























