Embed Size (px)
Citation preview

Review ArticleA Survey on Multisensor Fusion andConsensus Filtering for Sensor Networks
Wangyan Li1 Zidong Wang23 Guoliang Wei4 Lifeng Ma5 Jun Hu67 and Derui Ding4
1Business School University of Shanghai for Science and Technology Shanghai 200093 China2Department of Computer Science Brunel University London Uxbridge Middlesex UB8 3PH UK3Faculty of Engineering King Abdulaziz University Jeddah 21589 Saudi Arabia4School of Optical-Electrical and Computer Engineering Key Laboratory of Modern Optical SystemUniversity of Shanghai for Science and Technology Shanghai 200093 China5School of Automation Nanjing University of Science and Technology Nanjing 210094 China6Department of Applied Mathematics Harbin University of Science and Technology Harbin 150080 China7Research Institute of Intelligent Control and Systems Harbin Institute of Technology Harbin 150001 China
Correspondence should be addressed to Guoliang Wei guoliangwei1973gmailcom
Received 18 May 2015 Accepted 29 September 2015
Academic Editor Luca Guerrini
Copyright copy 2015 Wangyan Li et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Multisensor fusion and consensus filtering are two fascinating subjects in the research of sensor networks In this survey wewill cover both classic results and recent advances developed in these two topics First we recall some important results in thedevelopment of multisensor fusion technology Particularly we pay great attention to the fusion with unknown correlations whichubiquitously exist in most of distributed filtering problems Next we give a systematic review on several widely used consensusfiltering approaches Furthermore some latest progress on multisensor fusion and consensus filtering is also presented Finallyconclusions are drawn and several potential future research directions are outlined
1 Introduction
Multisensor fusion is also known as multisensor data fusion[1 2] or multisensor information fusion [3] which is anemerging technology originally catering for the militaryneeds such as battlefield surveillance automated targetrecognition remote sensing and guidance and control ofautonomous vehicles In recent years the multisensor fusiontechnology has been extensively applied to a variety of civilianapplications such as monitoring of complex machinerymedical diagnosis robotics video and image processingand smart buildings The essence of multisensor fusiontechniques is to combine data from multiple sensors andrelated information from associated databases to achieveimproved accuracies and more specific inferences than thatcould be achieved by the use of a single sensor alone [1]
Arguably Kalman filtering algorithm [4] is one of themost popular multisensor fusion methods mainly due toits simplicity ease of implementation and optimality in
a mean-squared error sense [2] and many important fusionresults based on it have been reported Notably the Kalmanfiltering based multisensor fusion algorithms require eitherindependence or prior knowledge of the cross covarianceof estimate errors to produce consistent results [2] Unfor-tunately in many practical scenarios their cross covari-ances are often unknown which are usually referred to asunknown correlations [5] unknown cross covariances [6]or unavailable cross-correlations [7] Unknown correlationsif not dealt with appropriately may significantly degradethe system performance It is no wonder that fusion withunknown correlations has also drawn constant attention fromboth theoretic and engineering perspectives
Recent years have witnessed significant development inthe area of sensor networks with motivating applicationsranging from wireless camera networks [8] to simultane-ous localization and mapping [9] to distributed multitargettracking [10] The general setup is to observe the underlyingprocess through a group of sensors organized according
Hindawi Publishing CorporationDiscrete Dynamics in Nature and SocietyVolume 2015 Article ID 683701 12 pageshttpdxdoiorg1011552015683701
2 Discrete Dynamics in Nature and Society
Dynamic object
Sensor 1 Sensor 2 Sensor Sensor
Filter 1 Filter 2 Filter
Distributed multisensor fusion
Filter
Consensus
middot middot middot
N minus 1
N minus 1
N
N
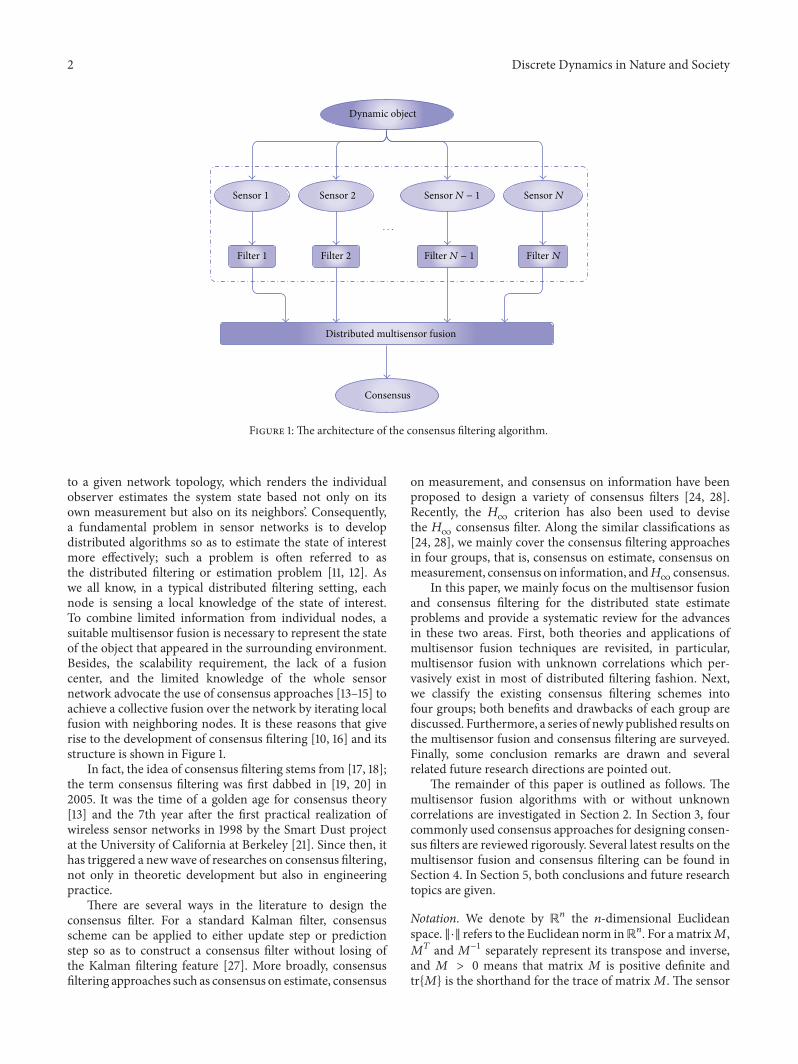
Figure 1 The architecture of the consensus filtering algorithm
to a given network topology which renders the individualobserver estimates the system state based not only on itsown measurement but also on its neighborsrsquo Consequentlya fundamental problem in sensor networks is to developdistributed algorithms so as to estimate the state of interestmore effectively such a problem is often referred to asthe distributed filtering or estimation problem [11 12] Aswe all know in a typical distributed filtering setting eachnode is sensing a local knowledge of the state of interestTo combine limited information from individual nodes asuitable multisensor fusion is necessary to represent the stateof the object that appeared in the surrounding environmentBesides the scalability requirement the lack of a fusioncenter and the limited knowledge of the whole sensornetwork advocate the use of consensus approaches [13ndash15] toachieve a collective fusion over the network by iterating localfusion with neighboring nodes It is these reasons that giverise to the development of consensus filtering [10 16] and itsstructure is shown in Figure 1
In fact the idea of consensus filtering stems from [17 18]the term consensus filtering was first dabbed in [19 20] in2005 It was the time of a golden age for consensus theory[13] and the 7th year after the first practical realization ofwireless sensor networks in 1998 by the Smart Dust projectat the University of California at Berkeley [21] Since then ithas triggered a newwave of researches on consensus filteringnot only in theoretic development but also in engineeringpractice
There are several ways in the literature to design theconsensus filter For a standard Kalman filter consensusscheme can be applied to either update step or predictionstep so as to construct a consensus filter without losing ofthe Kalman filtering feature [27] More broadly consensusfiltering approaches such as consensus on estimate consensus
on measurement and consensus on information have beenproposed to design a variety of consensus filters [24 28]Recently the 119867
infincriterion has also been used to devise
the 119867infin
consensus filter Along the similar classifications as[24 28] we mainly cover the consensus filtering approachesin four groups that is consensus on estimate consensus onmeasurement consensus on information and119867
infinconsensus
In this paper we mainly focus on the multisensor fusionand consensus filtering for the distributed state estimateproblems and provide a systematic review for the advancesin these two areas First both theories and applications ofmultisensor fusion techniques are revisited in particularmultisensor fusion with unknown correlations which per-vasively exist in most of distributed filtering fashion Nextwe classify the existing consensus filtering schemes intofour groups both benefits and drawbacks of each group arediscussed Furthermore a series of newly published results onthe multisensor fusion and consensus filtering are surveyedFinally some conclusion remarks are drawn and severalrelated future research directions are pointed out
The remainder of this paper is outlined as follows Themultisensor fusion algorithms with or without unknowncorrelations are investigated in Section 2 In Section 3 fourcommonly used consensus approaches for designing consen-sus filters are reviewed rigorously Several latest results on themultisensor fusion and consensus filtering can be found inSection 4 In Section 5 both conclusions and future researchtopics are given
Notation We denote by R119899 the 119899-dimensional Euclideanspace sdot refers to the Euclidean norm inR119899 For amatrix119872119872
119879 and 119872minus1 separately represent its transpose and inverse
and 119872 gt 0 means that matrix 119872 is positive definite andtr119872 is the shorthand for the trace of matrix 119872 The sensor
Discrete Dynamics in Nature and Society 3
nodes of the network are communicated over a connecteddigraph G = (NE) where N = 1 2 119899 is the set ofsensor nodes and E denotes the set of connections betweennodes An edge (119894 119895) isin E indicates that node 119895 can receiveinformation from node 119894 Further if node 119894 is included in itsneighbors we denote it as N
119894(N
119894= 119895 | (119895 119894) isin E) and
otherwise we denote it asN119894 119894 The notation |N| denotes
the cardinality of theN
2 Multisensor Fusion
The development of multisensor fusion was originally trig-gered by the demands from military area Later numerousapplications in nonmilitary areas provided another impetusto the multisensor fusion technology In this section weinvestigate the most commonly used multisensor fusiontechniques for the local estimation errors with correlationswithout correlations or with unknown correlations Theimportant fusion rules for those three types are listed inTable 1 where (119909
119894 119875
119894)119894isinN and (119909
119891 119875
119891) are local and fused
estimate and error covariance pair respectively Let us nowconduct a systematic review on the development of multisen-sor fusion technology during the past few decades
21 Multisensor Fusion At the beginning of the 1970s theUS navy merged data about Soviet naval movements at datafusion centers the result turned out to be more accuratethan using data from single sonar [29] This discovery hasheralded the research on multisensor fusion since thenvoluminous results have been published during the pastseveral decades see for example [3 30ndash39] For examplein 1971 the multisensor fusion problem was first studiedin [30] where the estimation errors in two track files fromdifferent sensors but corresponding to the same target wereassumed to be independent Later more general cases canbe found in [31 32] including Carlsonrsquos federated square rootfilter [32] Moreover a decentralized linear estimator in thepresence of correlatedmeasurement noise was constructed in[33] Further in 1986 [34] came up with a fusion equationwith the consideration of cross covariance between localestimates In 1994 [35] generalized the results in [34] andan optimal fusion equation was deduced in the sense ofmaximum likelihood estimate but the posterior probabilitydensity function should be of the standard normal densityfunction Ten years later this limitation was overcome by [3]where an optimal information fusion criterion was rederivedin the linear minimum variance sense with the help ofLagrange multiplier from the mathematical point of viewthis fusion rule is equivalent to the best linear unbiasedestimation fusion rule in [36] or weighted least squaresfusion rule in [37] In a recent paper [38] amultisensor fusionschemewas devised specifically for nonlinear estimate withinthe unscentedKalman filtering frameworkMore recently forthe case of singular estimation errors covariances and mea-surement noises covariances an optimal distributed Kalmanfiltering fusion strategy was proposed in [39] Besides ifthe local estimates are generated with different rates thecorresponding multirate fusion results were given in [40 41]
Table 1 Multisensor fusion rules
Types of estimationerrors Fusion rules Comments
No correlations(independent)
119875119891= (
119899
sum
119894=1
119875minus1
119894)
minus1
119909119891= 119875
119891(
119899
sum
119894=1
119875minus1
119894119909119894)
Optimal
Known correlations(correlated)
119875119891= (119890
119879
Σminus1
119890)minus1
lowast
119909119891= 119875
119891(119890
119879
Σminus1
119909)lowast
Optimal
Unknown correlations(unknown correlated)
119875119891= (
119899
sum
119894=1
120596119894119875minus1
119894)
minus1lowastlowast
119909119891= 119875
119891(
119899
sum
119894=1
120596119894119875minus1
119894119909119894)
lowastlowastSuboptimal
lowast
119890 = [119868 119868]119879 Σ = (119875
119894119895) 119894 119895 = 1 119899 and 119909 = [119909
119879
1 119909
119879
119899]119879
lowastlowastCovariance intersection rule where 120596119894isin [0 1] sum119899
119894=1120596119894= 1 and 120596
119894=
argmin120596119894isin[01]
tr119875119891
Nowadays with the rapid development of sensor networktechnology the multisensor fusion over sensor network hasbecome an active research area Recently the focus of themultisensor fusion has been shifted from centralized fusionto distributed one mainly due to the scalability robust-ness to failure structure flexibility and less communicationresources of the distributed sensor networks see for exam-ple [17 18] For instance [17] has proposed a distributedmultisensor fusion scheme that allows the nodes of a sensornetwork to track the average of inverse-covariance-weightedmeasurements and inverse-covariancematrices so as to reachso-called dynamic average consensus Almost in the sametime [18] has also introduced a distributed multisensorfusion scheme based on average consensus what is differentis that the scheme diffuses information across the networkby updating each nodersquos data with a weighted average of itsneighbors which finally converges to the global maximum-likelihood estimate In fact it was these two papers that gaverise to the consensus filtering which is the next focus of thissurvey
It is worth noting that the above results are obtainedwithin the Kalman filtering framework (broadly speakingthe Bayesian framework) which is only a small fraction ofthe whole family of multisensor fusion techniques the otherframeworks may include but are not limit to evidential beliefreasoning [42] fuzzy reasoning [43] probabilistic fusion[44] hybrid fusion [45] and randomset theoretic fusion [46]the interested readers may consult the survey paper [2] formore details
22 Fusion with Unknown Correlations Unknown correla-tions [5] are often referred to as unknown cross covariances[6] or unavailable cross-correlations [7] The main causes ofunknown correlations can be categorized into the followingtwo groups
(1) Lack of knowledge of the true system
(i) Unidentified correlations for example corre-lations from the observation noises as yet
4 Discrete Dynamics in Nature and Society
unidentified may occur during the movingprocess of vehicle which equipped a suite ofnavigation sensors [5]
(ii) Approximation implementation it is oftenassumed that the prior estimation error and thenewmeasurement error are uncorrelated whichmay introduce certain degree of unknowncorrelations in the final implementation [47]
(2) Correlations that are too difficult to describe
(i) Involving too many variables in the applicationslike map building and weather forecasting theprocessmodel could involve thousands of stateswhich means maintaining a full covariancematrix is impractical [5]
(ii) Data incest [24] or double counting problem[48] due to the presence of network loops theinformation is often inadvertently used severaltimes in a distributed fusion setting
(iii) Difficulty of calculation for example how toacquire reliable correlations in the nonlinearestimates is still an open question
To summarize it is widely believed that the unknowncorrelations ubiquitously exist in a diverse range of multi-sensor fusion problems Neglecting the effect of unknowncorrelations can result in grave consequence of performancedeterioration even divergence As such it has attracted andsustained attention from researchers for decades Howeverowing to the intricate unknown nature it is not easy tocome up with a satisfied scheme to address the fusionproblems with unknown correlations If we ignore the cor-relations directly which is the Naive fusion [49] it maylead to divergence of the filter To compensate this kindof divergence a normal suboptimal approach is to increasethe system noise artificially However this heuristic requiressubstantial certain expertise and compromises the integrityof the Kalman filter framework [50]
Among existing fusion solutions for systems withunknown correlations it was the covariance intersectionalgorithm [5] which was invented by Julier and Uhlmannin 1997 that provides an effective tool to tackle unknowncorrelations According to [51] the covariance intersectionfusion rule has the advantages lying in the following (i) Theidentification and computation of the cross covariances arecompletely avoided (ii) It yields a consistent fused estimateand thus a nondivergent filter is obtained (iii) The accuracyof the fused estimate outperforms each local one (iv) Itgives a common upper bound of actual estimation errorvariances which has robustness with respect to unknowncorrelations Since then it has attracted much interest from awider community see for example [7 49ndash64] Some of themfocused on improving the covariance intersection method-ology For instance a generalized covariance intersectionknown as split covariance intersection has been created in[52] for the purpose of incorporating known independentinformation Reference [53] has improved the main results
in [5] by investigating the linear combination gains in an 1198992-
dimensional space Meanwhile an information-theoreticaljustification of covariance intersection rule and its general-ization can be found in [54] and [55] respectively Later theChernoff fusion rule which includes covariance intersectionas a special case is also reviewed in [49] Recently [56 57]have separately proposed the largest ellipsoidal algorithmand ellipsoidal intersection state fusion method which leadto a higher accuracy for the fused estimate Moreover anaccuracy comparison between covariance intersection andthree different optimal fusion rules has been presented in[58] while the others turned to apply covariance intersectionalgorithm to a plethora of areas such as target tracking [7]fault-tolerant estimate [59] simultaneous localization andmapping [60] image fusion [61] vehicle localization [62] andNASAMars rover [63]
One of the significant drawbacks of covariance intersec-tion algorithm and its variants is the computation burdenWhen the number of information sources to be fused ismore than 2 this problem is exactly a nonlinear optimizationproblem with constraints in Euclidean space R119899 and itrapidly becomes computationally intractable especially inlarge distributed sensor networks Therefore there is a greatneed to develop fast covariance intersection algorithm tocircumvent this issue Fortunately there are several solutionsthat have been reported in this spirit One of them is thesequential covariance intersection [51] where the multidi-mension nonlinear optimization problem was reduced tothe optimization of several one-dimensional nonlinear costfunctions by batch processing procedureThe secondmethodis the suboptimal noniterative algorithm [50] the methodhas been further used in [64] for designing a diffusionKalman filtering scheme and [7] for an information-theoreticinterpretation The third one is the ellipsoidal intersection[57] where the obtained algebraic fusion formulas made itcomputationally feasible Different from the above methodstrying to approximate the optimal value the fourth solutioncan give an exact solution of the optimal weights in caseof low-dimensional covariance matrices by the close-formoptimization of covariance intersection [65] which reducedthe nonlinear optimization problem into the polynomialroot-finding problem
3 Consensus Filtering Approaches
This section gives a systematic overview of recent advanceson several consensus approaches which are suitable to designconsensus-based filters In general most of the publicationson consensus filtering approaches can be classified intofour groups consensus on estimates (CE) consensus onmeasurements (CM) consensus on information (CI) and119867
infinconsensus the mechanisms of these four types of con-
sensus filtering approaches for the typical linear time-varyingsystems with multiple sensor observations are depicted inTable 2 In the following we will take a deep investigation ofthese consensus filtering approaches one by one in order toinspire more research interest
Discrete Dynamics in Nature and Society 5
Table 2 The mechanisms of four consensus filtering approaches
Types Structures of consensus filterslowast References
CE119909119894
119896= 119909
119894
119896|119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896|119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896|119896minus1)
[22 23]
CMΩ
119894
119896|119896= Ω
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896
119902119894
119896|119896= 119902
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896
[20 22]
CIΩ
119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[Ω
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896]
119902119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[119902
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896]
[24 25]
119867infin
consensus
119909119894
119896= 119860
119896119909119894
119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896minus1)
1
119899sum
119894isinN
1003817100381710038171003817100381711989410038171003817100381710038171003817
2
le 1205742
V22+
1
119899sum
119894isinN
(119890119894
0)119879
119878119894
119890119894
0
lowastlowast
[11 26]
lowastThroughout the table 119860119896is the systems matrix For each node 119894 119867119894
119896 119877119894
119896 and 119911
119894
119896are respectively measurement matrix covariance matrix of measurement
noise and measurement output 119870119894
119896and 119862
119894
119896are the filter and consensus gains to be determined and 120587
119894119895
119871119896is the consensus weight after 119871 step consensus
Further denote Ω119896|119896
≜ (119875119896|119896)minus1 and 119902
119896|119896= (119875
119896|119896)minus1
119909119896|119896
as information matrix and information vector and (119867119894
119896)119879
(119877119894
119896)minus1
119911119894
119896and (119867119894
119896)119879
(119877119894
119896)minus1
119867119894
119896as innovation
pair lowastlowastWhere 119894 and 1198901198940are the filtering error and initial error for node 119894 respectively 120574 is the disturbance attenuation level and V represents noise while 119878119894 is
the given positive definite matrix
31 Consensus on Estimates Theconsensus approach belong-ing to the first group is the consensus on estimates (CE)in which only state estimates are averaged out to reachconsensus It is the most basic consensus filtering approachin the early stage of CE (
119894(119905) = sum
119895isin119873119894
119886119894119895(119909
119895(119905) minus 119909
119894(119905)) +
sum119895isin119869119894
119886119894119895(119906
119895(119905) minus 119909
119894(119905)) where 119909
119894(119905) and 119906
119894(119905) are the current
state and measurement of node 119894 resp 119873119894denotes the set
of neighbors of node 119894 while 119869119894denotes the set of inclusive
neighbors of node 119894 and 119886119894119895is the (119894 119895) entry of the adjacency
matrix of the associated communication graph) [19] eachsensor node was treated as an agent and with this respectthe full-fledged consensus theory in multiagent systems canbe directly applied to the distributed filters plus one extraconsensus term to reflect the measurement features Thisconsensus algorithmwas furthermodified to theKalman-likedistributed estimator that combined updated state estimateand consensus term which is also called Kalman consensusfilter [22 23] It should be noticed that the CE is not limitedto the Kalman-like filters (following the same definition as in[23] we refer to any recursive estimator that has the similarfilter structure as Kalman filter as Kalman-like filters) infact the well-known 119867
infinconsensus can also be included
in this group However due to its ever-growing importanceand influence in a variety of engineering areas we treat itas a separate consensus filtering approach for the purpose ofbetter discussing these issues
From the algorithm perspective it does not necessarilyrequire the information of local error covariance matrix orlocal probability density functions It is no wonder that CEand its variants have been employed to design an extensivebody of consensus filters see for example [12 23 66ndash72]
For instance by using the consensus strategy [66] hasconstructed a local estimate based on its own measurementsand on the estimates from its neighbors and [67] hasintroduced a consensus-based filter that can provide reliableestimate despite of the existence of missing observations andcommunication faults In [68] with the help of the theoryof synchronization and consensus in complex networks andsystems a novel CE consensus has been born with thepinning observers Further a CE term has been embeddedin the penalty function [69 Equation (10)] to increase theaccuracy of the local estimates which is fundamental toguarantee convergence of the state estimates to the state ofthe observed system More specifically [12] has devised aconsensus filter in two steps In the first step an updatewas produced using a Luenberger-type observer In thesecond step called consensus step every sensor computeda convex combination between its local update and theupdates received from its neighbors Meanwhile in [70] twodifferent distributed consensus filters have been integrated inthe proposed distributed sensor fusion algorithm to achievecooperative sensing among sensor nodes Recently based onthe CE [71] has designed two types of consensus filters fortarget tracking problem over heterogeneous sensor networksand their unbiasedness and optimality were discussed as wellLastly [72] has presented a decentralized observer with aconsensus filter that blended with its neighborhood so thatthe state estimate of each agent can reach consensus after 119903
times of iterations at each time interval
32 Consensus on Measurements The CE does not involvethe error covariance matrices which may lead to certaindegree of conservatism in designing consensus filter within
6 Discrete Dynamics in Nature and Society
the Kalman-like filter framework It is well known that theerror covariance matrices may contain valuable informationwhich has been successfully used to improve the filterperformance Taking this into account another consensusapproach that is consensus on measurements (CM) isproposed for fulfilling this requirement It performs a con-sensus on local measurements or more specifically localinnovation pairs so as to approximate in a distributed waythe correction step of the centralized Kalman filter It isworth noticing that the stability of CM consensus filteringcan be ensured only when a sufficiently large number ofconsensus steps are carried out during each sampling intervalso that the local information provided by the innovationpairs has time to spread throughout the whole networkBesides this kind of approach relies on the assumption thatthe measurement errors coming from different sensors aremutually independent and this approach is limited to theKalman-like filters
During the last decade the CM has been broadly used inboth the signal processing and control communities see forexample [20 22 73ndash77]The idea of CMconsensus originallyappeared in [20] to solve the data fusion problems in adistributed way by using low-pass and band-pass consensusfilters A modified version of this consensus approach waspresented in [22Algorithm 1] where two identical consensusfilters were employed and it is applicable to sensor networkwith different observation matrices Further [73] showedthat CM can guarantee that the local estimates of the errorcovariance matrix and local estimates of the state convergeto their centralized ones Later this consensus approach wasapplied to design consensus filter for jump Markov systems[74] and discrete-time nonlinear systems with non-Gaussiannoise [75] In a following paper [76] a pseudo-measurementmatrix was reconstructed by embedding a statistical linearerror propagation approach [78] which facilitates the use ofCM in the unscented Kalman filtering fashion Recently CMwas interpreted as likelihood consensus and applied to thedistributed particle filtering setting [77]
33 Consensus on Information Due to the facts that onlyone or few consensus iterations per time can be affordedin order to reduce the communication overhead for higherenergy efficiency in particular wireless sensor network envi-ronment and there could not be enough time to wait forCM to convergence [79] consequently an alternative con-sensus approach namely consensus on information (CI)was recently invented to circumvent these issues From analgorithm standpoint CI is nothing but forming a localaverage on information matrices and information vectorsThe approach can guarantee stability for any number ofconsensus steps (even for single one) but its mean-squaredestimation error performance may be hampered since thefusion rule adopts a conservative point of view by assumingthat the correlations between local estimates are completelyunknown [28] It was originally introduced in [25] for adistributed state estimation problem later a mathematicalrigorous treatment of it was detailed in [24] where CIis interpreted as a consensus on probability density func-tions in the Kullback-Leibler average sense Following the
same consensus paradigm [10] presented a novel consensuscardinalized probability hypothesis density filter to studythe distributed multitarget tracking problem over a sensornetwork and [80] designed a consensus-based multiple-model Bayesian filter for the distributed tracking task of amaneuvering target More recently [81] applied CI to designthe distributed unscented Kalman filters for systems withstate saturations and sensor saturations
34 119867infin
Consensus It should be pointed out that the afore-mentioned consensus filtering algorithms are mainly basedon the traditional Kalman filtering theory which requiresthe statistic information about plant model to be knownperfectly unfortunately the practical systems are oftenaccompanied with parameter uncertainties and exogenousdisturbances Consequently there is a great impetus todevelop consensus filtering scheme as robust as possibleWith these needs considered the 119867
infinconsensus has been
recently introduced and has been widely recognized see forexample [11 26 82ndash88]
The term 119867infin
consensus was officially coined by [11]the main intuition behind it arises from the notion of 119867
infin
disagreement between adjacent nodes to quantify consensusperformance of the filter network [85] In [11] the 119867
infin
consensus performance requirement has been defined toquantify bounded consensus regarding the filtering errors(agreements) over a finite horizon the paper has con-sidered a distributed 119867
infinconsensus filtering problem for
sensor networks with multiple missing measurements In thesimilar vein [26] has studied the distributed 119867
infinfiltering
with randomly occurring saturation and successive packetdropout Furthermore the119867
infinconsensus approach has been
utilized for solving control problems of multiagent systemsfor example in a novel fuzzy model setting [83] and systemwith missing measurements [82] Most recently [84] has putforward distributed event-triggered 119867
infinconsensus filtering
problems in mobile sensor networks where the transmissionof each sensor was triggered by an event At about thesame time as [11] Ugrinovskii followed a different path toinvestigate the 119867
infinconsensus by using vector dissipativity
methodology see for example [85ndash88] For instance bypursuing 119867
infinconsensus on estimates the distributed robust
filtering problems have been discussed for uncertain systemswith measurement uncertainty [85] a nonvanishing nonlin-ear disturbance with unbounded energy [86] and switchingtopologies [87] lately [88] has laid out 119867
infinconsensus-
based synchronization protocol scheduled for each agent tosynchronize with a reference parameter-varying system
4 Latest Progress
Very recently the research on multisensor fusion and con-sensus filtering is receiving an increasing attention manyinspiring results have been published Here we highlightsome of the newest work with respect to this topic
(1) Fusion with Incomplete Information Due to limitedcapacity of signal transmission through networkedsystems the incomplete information [89] (such as
Discrete Dynamics in Nature and Society 7
missing measurement packet dropout quantiza-tion saturation and networked-induced delay) isinevitable in most of real implementations Thesephenomena may potentially deteriorate the systemperformance accordingly the multisensor fusion forsystems with incomplete information becomes pop-ular For example [90] has developed fusion strate-gies for communication between the sensors andthe estimation center was subject to random packetloss When sensors experience randomly delayedmeasurements and sensor failures [91] has deviseda robust information fusion estimator Lastly [92]has designed an optimal distributed fusion Kalmanfilter with the consideration of missing sensor mea-surements random transmission delays and packetdropouts Very recently [93] was concerned with thedistributed Kalman filtering problem for a class ofnetworked multisensor fusion systems with commu-nication bandwidth constraints
(2) Hybrid CMCI In [28] a new class of consensusfilters (named Hybrid CMCI) which enjoy the com-plementary benefits from two existing consensusfiltering approaches that is CM and CI have beenintroduced for distributed state estimation over sen-sor networks The results have claimed that underminimal requirements (ie collective observabilityand network connectivity) the guaranteed stabilityof the Hybrid CMCI filter can be achieved The ideafirst appeared in [94] more recently a mathematicalrigorous analysis of the Hybrid CMCI consensus forextended Kalman filtering setting has been given in[95]
(3) Set-Theoretic Consensus In [96] under the assump-tion of unknown but bounded measurement errorsa set-theoreticset-membership consensus has beenformulated in a set-theoretic framework Further thepaper has analyzed the consensus algorithms in thecase of undirected and stationary communicationgraphs The result has shown that for both types ofprotocols asymptotic consensus cannot be guaran-teed with respect to all possible noise realizations butthe disagreement among the agent states is asymptot-ically bounded
(4) WeightedAverageConsensus-BasedUnscentedKalmanFiltering Reference [97] has investigated the consen-sus-based distributed state estimation problems fora class of sensor networks within the unscentedKalman filter framework Without approximatinga pseudo-measurement matrix a weighted averageconsensus-based unscented Kalman filtering algo-rithm has been developed which directly imple-mented consensus on state vectors and error covari-ance matrices and its estimation error was proven tobe bounded in mean square
(5) Distributed 119867infin
Consensus Filtering for PiecewiseDiscrete-Time Linear Systems Reference [98] has
studied the distributed 119867infin
consensus filtering prob-lem for a class of piecewise discrete-time linearsystems First the modes and their transitions of aug-mented piecewise linear systems as well as distributedfilters have been formulated Next the structure ofaugmented distributed filter gains has been presentedin virtue of the adjacent matrix of sensor networksBesides a set of sufficient conditions have beenprovided for the distributed filter to ensure that itsdynamics were global asymptotically stable with the119867
infinconsensus performance constraint
(6) Distributed Kalman Consensus Filter with Intermit-tent Observations Reference [99] has considered thedistributed state estimation problem for linear time-varying systems with intermittent observations Inthe paper an optimal Kalman consensus filter hasbeen developed by minimizing the mean-squaredestimation error for each node To derive a scalablealgorithm for the covariance matrices update a sub-optimal filter has also been proposed by omitting theedge covariance matrices among nodes Besides asufficient condition was presented for ensuring thestochastic stability of the suboptimal filter by usingthe Lyapunov-based approach
(7) Information Weighted Consensus As noted in [8]the consensus estimate is suboptimal when the crosscovariances between the individual state estimatesacross different nodes are not incorporated in thedistributed filtering framework The cross covarianceis usually neglected because of the limitations ofthe computational and bandwidth requirements Assuch a consensus filtering scheme should guaranteeconvergence to the optimal centralized estimate aswell as maintaining low computation and commu-nication resource requirements Motivated by theabove discussions [8] has proposed the informationweighted consensus algorithm which can secure theoptimal estimate by proper weighting of the priorstate and measurement information
5 Conclusion and Future Directions
In this paper we have introduced both classic results andrecent advances developed inmultisensor fusion and consen-sus filtering First we recalled some important results in thedevelopment of multisensor fusion technology in particularmultisensor fusionwith unknown correlations Next we gavea systematic review of several consensus filtering approacheswhich are widely used to design consensus filter Furthersome latest progress on multisensor fusion and consensusfiltering was also presented To conclude this survey paperbased on the literature reviewed we will offer readers aglimpse of several future directions that may spark theirinterest
(1) Further Divide the Unknown Correlations Althoughthe reasons causing unknown correlations are abun-dant in many real situations we can obtain the par-tial information about unknowns such as uncertain
8 Discrete Dynamics in Nature and Society
system matrix [100 101] uncertain-covariance noise[102] nonfragile filter [103] and uncertain stochasticnonlinearity [100 104] which can be tackled byrobust filtering [100] extendedKalman filtering [105]recursive filtering [106] and 119867
infinrobust filtering
[107] Therefore according to the unknown nature ofunknown correlations it is necessary to further dividethem into two groups partial unknown correlationsand complete unknown correlations Based on thatit is possible to develop new fusion mechanisms orimprove the existing ones to get a better solution forfusion with unknown correlations
(2) Mathematical Characterization of Unknown Correla-tions Due to the intricate unknown nature most ofpublications involving unknown correlations are justlabeling the error cross covariance 119875
119894119895as unknown
without giving their structures which unfortunatelydid not capture the information of correlations andtheir fusion results are inevitably leading to certaindegree of conservatism Reference [57] has made afew attempts to provide an explicit characterizationfor unknown correlation however the derivation iscomplex and not intuitive Hence it is still an openquestion to get a general yet concise mathematicalmodel to describe the unknown correlations
(3) Consensus Filtering with Unknown Correlations Theunknown correlations are ubiquitously existing ingeneral distributed filtering problems they are alsothe major source for the ldquodata insectrdquo phenomenonin the network It is therefore of great importanceto study the consensus filtering problem for systemswith unknown correlations Despite its significancethe progress on this topic is slow Take the covari-ance intersection rule for example how to designconsensus filter which involves information matricesinformation vectors and optimal weights simultane-ouslywithout comprising its performance it would beanother interesting topic
(4) Hybrid Consensus The increasing complexity of sys-tem dynamics and high demands for filter perfor-mance call for the design of the consensus filterwhich should be as good as possible In this spiritthe hybrid consensus filtering scheme which bene-fits from different consensus approaches may meetthese requirements Although initial interests haveappeared in recent years see for example [94 95]it is a trend that more and more hybrid consensusfiltering schemes which blend two ormore consensusfiltering approaches will be constructed in the com-ing future
(5) Stochastic Stability Analysis of Kalman-Like ConsensusFilter In a Kalman-like filter there are two primarysources for error in the estimation initializationerror and stochastic errors due to the process andmeasurement noise [108] However most work hasignored the process and measurement noise whenanalyzing the stability of the consensus filter which is
hardly a reasonable treatmentThe stochastic stabilitylemma [109] may provide a possible solution and hasbeen used as an effective tool for analyzing the singleKalman-like filter see for example [109ndash112] but forthe distributed case its stochastic stability analysisremains to be established
(6) Beyond Consensus Even though the consensus isthe mostly used strategy for the distributed filteringproblems it may not be the best solution for certaincircumstance for example the diffusion strategy[113] is particularly suited for problems involving therecursive minimization of cost functions as opposedto consensus strategy It is therefore of significantengineering importance to find new strategy ormake a trade-off between different strategies for thedistributed filtering problems with new network-induced phenomena such as randomly occurringnonlinearities and fading measurements [114 115]
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the Royal Society of theUK theNational Natural Science Foundation of China underGrants 61329301 61374039 61304010 11301118 and 61573246the Hujiang Foundation of China under Grants C14002and D15009 the Alexander von Humboldt Foundation ofGermany and the Innovation Fund Project for GraduateStudent of Shanghai under Grant JWCXSL1401
References
[1] D L Hall and J Llinas ldquoAn introduction to multisensor datafusionrdquo Proceedings of the IEEE vol 85 no 1 pp 6ndash23 1997
[2] B Khaleghi A Khamis F O Karray and S N Razavi ldquoMulti-sensor data fusion a review of the state-of-the-artrdquo InformationFusion vol 14 no 1 pp 28ndash44 2013
[3] S-L Sun and Z-L Deng ldquoMulti-sensor optimal informationfusion Kalman filterrdquo Automatica vol 40 no 6 pp 1017ndash10232004
[4] R E Kalman ldquoA new approach to linear filtering and predictionproblemsrdquo Journal of Basic Engineering vol 82 no 1 pp 35ndash451960
[5] S J Julier and J K Uhlmann ldquoNon-divergent estimation algo-rithm in the presence of unknown correlationsrdquo in Proceedingsof the 16th American Control Conference vol 4 pp 2369ndash2373June 1997
[6] J K Uhlmann ldquoGeneral data fusion for estimates withunknown cross covariancesrdquo in Signal Processing Sensor Fusionand Target Recognition V vol 2755 of Proceedings of SPIE June1996
[7] Y Wang and X R Li ldquoDistributed estimation fusion withunavailable cross-correlationrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 48 no 1 pp 259ndash278 2012
Discrete Dynamics in Nature and Society 9
[8] A T Kamal J A Farrell and A K Roy-Chowdhury ldquoInfor-mation weighted consensus filters and their application indistributed camera networksrdquo IEEE Transactions on AutomaticControl vol 58 no 12 pp 3112ndash3125 2013
[9] V Ugrinovskii ldquoConditions for detectability in distributedconsensus-based observer networksrdquo IEEE Transactions onAutomatic Control vol 58 no 10 pp 2659ndash2664 2013
[10] G Battistelli L Chisci C Fantacci A Farina and A GrazianoldquoConsensus CPHD filter for distributed multitarget trackingrdquoIEEE Journal on Selected Topics in Signal Processing vol 7 no 3pp 508ndash520 2013
[11] B Shen Z Wang and Y S Hung ldquoDistributed 119867infin-consensus
filtering in sensor networks with multiple missing measure-ments the finite-horizon caserdquo Automatica vol 46 no 10 pp1682ndash1688 2010
[12] I Matei and J S Baras ldquoConsensus-based linear distributedfilteringrdquo Automatica vol 48 no 8 pp 1776ndash1782 2012
[13] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[14] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedings ofthe IEEE vol 95 no 1 pp 215ndash233 2007
[15] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[16] C Fantacci B-N Vo B-T Vo G Battistelli and L ChiscildquoConsensus labeled random finite set filtering for distributedmulti-objecttrackingrdquo httparxivorgabs150101579
[17] D P Spanos R Olfati-Saber and R M Murray ldquoApproximatedistributed kalman filtering in sensor networks with quan-tifiable performancerdquo in Proceedings of the 4th InternationalSymposium on Information Processing in Sensor Networks (IPSNrsquo05) pp 133ndash139 Pasadena Calif USA April 2005
[18] L Xiao S Boyd and S Lall ldquoA Scheme for robust distributedsensor fusion based on average consensusrdquo in Proceedings ofthe 4th International Symposium on Information Processing inSensor Networks (IPSN rsquo05) pp 63ndash70 April 2005
[19] R Olfati-Saber and J S Shamma ldquoConsensus filters for sensornetworks and distributed sensor fusionrdquo in Proceedings of the44th IEEE Conference on Decision and Control and EuropeanControl Conference (CDC-ECC rsquo05) pp 6698ndash6703 IEEEDecember 2005
[20] R Olfati-Saber ldquoDistributed Kalman filter with embeddedconsensus filtersrdquo in Proceedings of the 44th IEEE Conference onDecision and Control and European Control Conference (CDC-ECC rsquo05) pp 8179ndash8184 IEEE December 2005
[21] K J Astrom and P R Kumar ldquoControl a perspectiverdquo Auto-matica vol 50 no 1 pp 3ndash43 2014
[22] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control pp 5492ndash5498 IEEE New Orleans La USADecember 2007
[23] R Olfati-Saber ldquoKalman-consensus filter optimality stabilityand performancerdquo inProceedings of the 48th IEEEConference onDecision and Control 2009 Held Jointly with 2009 28th ChineseControl Conference pp 7036ndash7042 Shanghai ChinaDecember2009
[24] G Battistelli and L Chisci ldquoKullbackndashLeibler average consen-sus on probability densities and distributed state estimation
with guaranteed stabilityrdquo Automatica vol 50 no 3 pp 707ndash718 2014
[25] G Battistelli L Chisci M Stefano and P Francesco ldquoAninformation-theoretic approach to distributed state estimationrdquoin Proceedings of the 18th IFACWorld Congress pp 12477ndash12482Milan Italy August 2011
[26] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
[27] W Yang G Chen X Wang and L Shi ldquoStochastic sensor acti-vation for distributed state estimation over a sensor networkrdquoAutomatica vol 50 no 8 pp 2070ndash2076 2014
[28] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based linear and nonlinear filteringrdquo IEEE Trans-actions on Automatic Control vol 60 no 5 pp 1410ndash1415 2015
[29] N Friedman Seapower as Strategy Navies and National Inter-ests Naval Institute Press 2001
[30] R Singer and A Kanyuck ldquoComputer control of multiple sitetrack correlationrdquo Automatica vol 7 no 4 pp 455ndash463 1971
[31] A S Willsky M G Bello D A Castanon B C Levy andG C Verghese ldquoCombining and updating of local estimatesand regional maps along sets of one-dimensional tracksrdquo IEEETransactions on Automatic Control vol 27 no 4 pp 799ndash8131982
[32] N A Carlson ldquoFederated square root filter for decentralizedparallel processorsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 26 no 3 pp 517ndash525 1990
[33] S Roy and R A Iltis ldquoDecentralized linear estimation incorrelatedmeasurement noiserdquo IEEE Transactions on Aerospaceand Electronic Systems vol 27 no 6 pp 939ndash941 1991
[34] Y Bar-Shalom and L Campo ldquoThe effect of the commonprocess noise on the two-sensor fused-track covariancerdquo IEEETransactions on Aerospace and Electronic Systems vol AES-22no 6 pp 803ndash805 1986
[35] K H Kim ldquoDevelopment of track to track fusion algorithmsrdquoin Proceedings of the 13th American Control Conference vol 1pp 1037ndash1041 Baltimore Md USA June 1994
[36] X R Li Y Zhu JWang andCHan ldquoOptimal linear estimationfusionmdashpart I unified fusion rulesrdquo IEEE Transactions onInformation Theory vol 49 no 9 pp 2192ndash2323 2003
[37] Z-L Deng Y Gao LMao Y Li and G Hao ldquoNew approach toinformation fusion steady-state Kalman filteringrdquo Automaticavol 41 no 10 pp 1695ndash1707 2005
[38] D-J Lee ldquoNonlinear estimation and multiple sensor fusionusing unscented information filteringrdquo IEEE Signal ProcessingLetters vol 15 pp 861ndash864 2008
[39] E Song J Xu and Y Zhu ldquoOptimal distributed Kalmanfiltering fusion with singular covariances of filtering errors andmeasurement noisesrdquo IEEE Transactions on Automatic Controlvol 59 no 5 pp 1271ndash1282 2014
[40] W-A Zhang G Feng and L Yu ldquoMulti-rate distributed fusionestimation for sensor networks with packet lossesrdquoAutomaticavol 48 no 9 pp 2016ndash2028 2012
[41] W-A Zhang S Liu and L Yu ldquoFusion estimation for sensornetworks with nonuniform estimation ratesrdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 61 no 5 pp 1485ndash1498 2014
[42] T D Garvey J D Lowrance and M A Fischler ldquoAn inferencetechnique for integrating knowledge from disparate sourcesrdquoin Proceedings of the International Joint Conference on ArtificialIntelligence pp 319ndash325 Vancouver Canada August 1981
10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
2 Discrete Dynamics in Nature and Society
Dynamic object
Sensor 1 Sensor 2 Sensor Sensor
Filter 1 Filter 2 Filter
Distributed multisensor fusion
Filter
Consensus
middot middot middot
N minus 1
N minus 1
N
N
Figure 1 The architecture of the consensus filtering algorithm
to a given network topology which renders the individualobserver estimates the system state based not only on itsown measurement but also on its neighborsrsquo Consequentlya fundamental problem in sensor networks is to developdistributed algorithms so as to estimate the state of interestmore effectively such a problem is often referred to asthe distributed filtering or estimation problem [11 12] Aswe all know in a typical distributed filtering setting eachnode is sensing a local knowledge of the state of interestTo combine limited information from individual nodes asuitable multisensor fusion is necessary to represent the stateof the object that appeared in the surrounding environmentBesides the scalability requirement the lack of a fusioncenter and the limited knowledge of the whole sensornetwork advocate the use of consensus approaches [13ndash15] toachieve a collective fusion over the network by iterating localfusion with neighboring nodes It is these reasons that giverise to the development of consensus filtering [10 16] and itsstructure is shown in Figure 1
In fact the idea of consensus filtering stems from [17 18]the term consensus filtering was first dabbed in [19 20] in2005 It was the time of a golden age for consensus theory[13] and the 7th year after the first practical realization ofwireless sensor networks in 1998 by the Smart Dust projectat the University of California at Berkeley [21] Since then ithas triggered a newwave of researches on consensus filteringnot only in theoretic development but also in engineeringpractice
There are several ways in the literature to design theconsensus filter For a standard Kalman filter consensusscheme can be applied to either update step or predictionstep so as to construct a consensus filter without losing ofthe Kalman filtering feature [27] More broadly consensusfiltering approaches such as consensus on estimate consensus
on measurement and consensus on information have beenproposed to design a variety of consensus filters [24 28]Recently the 119867
infincriterion has also been used to devise
the 119867infin
consensus filter Along the similar classifications as[24 28] we mainly cover the consensus filtering approachesin four groups that is consensus on estimate consensus onmeasurement consensus on information and119867
infinconsensus
In this paper we mainly focus on the multisensor fusionand consensus filtering for the distributed state estimateproblems and provide a systematic review for the advancesin these two areas First both theories and applications ofmultisensor fusion techniques are revisited in particularmultisensor fusion with unknown correlations which per-vasively exist in most of distributed filtering fashion Nextwe classify the existing consensus filtering schemes intofour groups both benefits and drawbacks of each group arediscussed Furthermore a series of newly published results onthe multisensor fusion and consensus filtering are surveyedFinally some conclusion remarks are drawn and severalrelated future research directions are pointed out
The remainder of this paper is outlined as follows Themultisensor fusion algorithms with or without unknowncorrelations are investigated in Section 2 In Section 3 fourcommonly used consensus approaches for designing consen-sus filters are reviewed rigorously Several latest results on themultisensor fusion and consensus filtering can be found inSection 4 In Section 5 both conclusions and future researchtopics are given
Notation We denote by R119899 the 119899-dimensional Euclideanspace sdot refers to the Euclidean norm inR119899 For amatrix119872119872
119879 and 119872minus1 separately represent its transpose and inverse
and 119872 gt 0 means that matrix 119872 is positive definite andtr119872 is the shorthand for the trace of matrix 119872 The sensor
Discrete Dynamics in Nature and Society 3
nodes of the network are communicated over a connecteddigraph G = (NE) where N = 1 2 119899 is the set ofsensor nodes and E denotes the set of connections betweennodes An edge (119894 119895) isin E indicates that node 119895 can receiveinformation from node 119894 Further if node 119894 is included in itsneighbors we denote it as N
119894(N
119894= 119895 | (119895 119894) isin E) and
otherwise we denote it asN119894 119894 The notation |N| denotes
the cardinality of theN
2 Multisensor Fusion
The development of multisensor fusion was originally trig-gered by the demands from military area Later numerousapplications in nonmilitary areas provided another impetusto the multisensor fusion technology In this section weinvestigate the most commonly used multisensor fusiontechniques for the local estimation errors with correlationswithout correlations or with unknown correlations Theimportant fusion rules for those three types are listed inTable 1 where (119909
119894 119875
119894)119894isinN and (119909
119891 119875
119891) are local and fused
estimate and error covariance pair respectively Let us nowconduct a systematic review on the development of multisen-sor fusion technology during the past few decades
21 Multisensor Fusion At the beginning of the 1970s theUS navy merged data about Soviet naval movements at datafusion centers the result turned out to be more accuratethan using data from single sonar [29] This discovery hasheralded the research on multisensor fusion since thenvoluminous results have been published during the pastseveral decades see for example [3 30ndash39] For examplein 1971 the multisensor fusion problem was first studiedin [30] where the estimation errors in two track files fromdifferent sensors but corresponding to the same target wereassumed to be independent Later more general cases canbe found in [31 32] including Carlsonrsquos federated square rootfilter [32] Moreover a decentralized linear estimator in thepresence of correlatedmeasurement noise was constructed in[33] Further in 1986 [34] came up with a fusion equationwith the consideration of cross covariance between localestimates In 1994 [35] generalized the results in [34] andan optimal fusion equation was deduced in the sense ofmaximum likelihood estimate but the posterior probabilitydensity function should be of the standard normal densityfunction Ten years later this limitation was overcome by [3]where an optimal information fusion criterion was rederivedin the linear minimum variance sense with the help ofLagrange multiplier from the mathematical point of viewthis fusion rule is equivalent to the best linear unbiasedestimation fusion rule in [36] or weighted least squaresfusion rule in [37] In a recent paper [38] amultisensor fusionschemewas devised specifically for nonlinear estimate withinthe unscentedKalman filtering frameworkMore recently forthe case of singular estimation errors covariances and mea-surement noises covariances an optimal distributed Kalmanfiltering fusion strategy was proposed in [39] Besides ifthe local estimates are generated with different rates thecorresponding multirate fusion results were given in [40 41]
Table 1 Multisensor fusion rules
Types of estimationerrors Fusion rules Comments
No correlations(independent)
119875119891= (
119899
sum
119894=1
119875minus1
119894)
minus1
119909119891= 119875
119891(
119899
sum
119894=1
119875minus1
119894119909119894)
Optimal
Known correlations(correlated)
119875119891= (119890
119879
Σminus1
119890)minus1
lowast
119909119891= 119875
119891(119890
119879
Σminus1
119909)lowast
Optimal
Unknown correlations(unknown correlated)
119875119891= (
119899
sum
119894=1
120596119894119875minus1
119894)
minus1lowastlowast
119909119891= 119875
119891(
119899
sum
119894=1
120596119894119875minus1
119894119909119894)
lowastlowastSuboptimal
lowast
119890 = [119868 119868]119879 Σ = (119875
119894119895) 119894 119895 = 1 119899 and 119909 = [119909
119879
1 119909
119879
119899]119879
lowastlowastCovariance intersection rule where 120596119894isin [0 1] sum119899
119894=1120596119894= 1 and 120596
119894=
argmin120596119894isin[01]
tr119875119891
Nowadays with the rapid development of sensor networktechnology the multisensor fusion over sensor network hasbecome an active research area Recently the focus of themultisensor fusion has been shifted from centralized fusionto distributed one mainly due to the scalability robust-ness to failure structure flexibility and less communicationresources of the distributed sensor networks see for exam-ple [17 18] For instance [17] has proposed a distributedmultisensor fusion scheme that allows the nodes of a sensornetwork to track the average of inverse-covariance-weightedmeasurements and inverse-covariancematrices so as to reachso-called dynamic average consensus Almost in the sametime [18] has also introduced a distributed multisensorfusion scheme based on average consensus what is differentis that the scheme diffuses information across the networkby updating each nodersquos data with a weighted average of itsneighbors which finally converges to the global maximum-likelihood estimate In fact it was these two papers that gaverise to the consensus filtering which is the next focus of thissurvey
It is worth noting that the above results are obtainedwithin the Kalman filtering framework (broadly speakingthe Bayesian framework) which is only a small fraction ofthe whole family of multisensor fusion techniques the otherframeworks may include but are not limit to evidential beliefreasoning [42] fuzzy reasoning [43] probabilistic fusion[44] hybrid fusion [45] and randomset theoretic fusion [46]the interested readers may consult the survey paper [2] formore details
22 Fusion with Unknown Correlations Unknown correla-tions [5] are often referred to as unknown cross covariances[6] or unavailable cross-correlations [7] The main causes ofunknown correlations can be categorized into the followingtwo groups
(1) Lack of knowledge of the true system
(i) Unidentified correlations for example corre-lations from the observation noises as yet
4 Discrete Dynamics in Nature and Society
unidentified may occur during the movingprocess of vehicle which equipped a suite ofnavigation sensors [5]
(ii) Approximation implementation it is oftenassumed that the prior estimation error and thenewmeasurement error are uncorrelated whichmay introduce certain degree of unknowncorrelations in the final implementation [47]
(2) Correlations that are too difficult to describe
(i) Involving too many variables in the applicationslike map building and weather forecasting theprocessmodel could involve thousands of stateswhich means maintaining a full covariancematrix is impractical [5]
(ii) Data incest [24] or double counting problem[48] due to the presence of network loops theinformation is often inadvertently used severaltimes in a distributed fusion setting
(iii) Difficulty of calculation for example how toacquire reliable correlations in the nonlinearestimates is still an open question
To summarize it is widely believed that the unknowncorrelations ubiquitously exist in a diverse range of multi-sensor fusion problems Neglecting the effect of unknowncorrelations can result in grave consequence of performancedeterioration even divergence As such it has attracted andsustained attention from researchers for decades Howeverowing to the intricate unknown nature it is not easy tocome up with a satisfied scheme to address the fusionproblems with unknown correlations If we ignore the cor-relations directly which is the Naive fusion [49] it maylead to divergence of the filter To compensate this kindof divergence a normal suboptimal approach is to increasethe system noise artificially However this heuristic requiressubstantial certain expertise and compromises the integrityof the Kalman filter framework [50]
Among existing fusion solutions for systems withunknown correlations it was the covariance intersectionalgorithm [5] which was invented by Julier and Uhlmannin 1997 that provides an effective tool to tackle unknowncorrelations According to [51] the covariance intersectionfusion rule has the advantages lying in the following (i) Theidentification and computation of the cross covariances arecompletely avoided (ii) It yields a consistent fused estimateand thus a nondivergent filter is obtained (iii) The accuracyof the fused estimate outperforms each local one (iv) Itgives a common upper bound of actual estimation errorvariances which has robustness with respect to unknowncorrelations Since then it has attracted much interest from awider community see for example [7 49ndash64] Some of themfocused on improving the covariance intersection method-ology For instance a generalized covariance intersectionknown as split covariance intersection has been created in[52] for the purpose of incorporating known independentinformation Reference [53] has improved the main results
in [5] by investigating the linear combination gains in an 1198992-
dimensional space Meanwhile an information-theoreticaljustification of covariance intersection rule and its general-ization can be found in [54] and [55] respectively Later theChernoff fusion rule which includes covariance intersectionas a special case is also reviewed in [49] Recently [56 57]have separately proposed the largest ellipsoidal algorithmand ellipsoidal intersection state fusion method which leadto a higher accuracy for the fused estimate Moreover anaccuracy comparison between covariance intersection andthree different optimal fusion rules has been presented in[58] while the others turned to apply covariance intersectionalgorithm to a plethora of areas such as target tracking [7]fault-tolerant estimate [59] simultaneous localization andmapping [60] image fusion [61] vehicle localization [62] andNASAMars rover [63]
One of the significant drawbacks of covariance intersec-tion algorithm and its variants is the computation burdenWhen the number of information sources to be fused ismore than 2 this problem is exactly a nonlinear optimizationproblem with constraints in Euclidean space R119899 and itrapidly becomes computationally intractable especially inlarge distributed sensor networks Therefore there is a greatneed to develop fast covariance intersection algorithm tocircumvent this issue Fortunately there are several solutionsthat have been reported in this spirit One of them is thesequential covariance intersection [51] where the multidi-mension nonlinear optimization problem was reduced tothe optimization of several one-dimensional nonlinear costfunctions by batch processing procedureThe secondmethodis the suboptimal noniterative algorithm [50] the methodhas been further used in [64] for designing a diffusionKalman filtering scheme and [7] for an information-theoreticinterpretation The third one is the ellipsoidal intersection[57] where the obtained algebraic fusion formulas made itcomputationally feasible Different from the above methodstrying to approximate the optimal value the fourth solutioncan give an exact solution of the optimal weights in caseof low-dimensional covariance matrices by the close-formoptimization of covariance intersection [65] which reducedthe nonlinear optimization problem into the polynomialroot-finding problem
3 Consensus Filtering Approaches
This section gives a systematic overview of recent advanceson several consensus approaches which are suitable to designconsensus-based filters In general most of the publicationson consensus filtering approaches can be classified intofour groups consensus on estimates (CE) consensus onmeasurements (CM) consensus on information (CI) and119867
infinconsensus the mechanisms of these four types of con-
sensus filtering approaches for the typical linear time-varyingsystems with multiple sensor observations are depicted inTable 2 In the following we will take a deep investigation ofthese consensus filtering approaches one by one in order toinspire more research interest
Discrete Dynamics in Nature and Society 5
Table 2 The mechanisms of four consensus filtering approaches
Types Structures of consensus filterslowast References
CE119909119894
119896= 119909
119894
119896|119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896|119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896|119896minus1)
[22 23]
CMΩ
119894
119896|119896= Ω
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896
119902119894
119896|119896= 119902
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896
[20 22]
CIΩ
119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[Ω
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896]
119902119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[119902
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896]
[24 25]
119867infin
consensus
119909119894
119896= 119860
119896119909119894
119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896minus1)
1
119899sum
119894isinN
1003817100381710038171003817100381711989410038171003817100381710038171003817
2
le 1205742
V22+
1
119899sum
119894isinN
(119890119894
0)119879
119878119894
119890119894
0
lowastlowast
[11 26]
lowastThroughout the table 119860119896is the systems matrix For each node 119894 119867119894
119896 119877119894
119896 and 119911
119894
119896are respectively measurement matrix covariance matrix of measurement
noise and measurement output 119870119894
119896and 119862
119894
119896are the filter and consensus gains to be determined and 120587
119894119895
119871119896is the consensus weight after 119871 step consensus
Further denote Ω119896|119896
≜ (119875119896|119896)minus1 and 119902
119896|119896= (119875
119896|119896)minus1
119909119896|119896
as information matrix and information vector and (119867119894
119896)119879
(119877119894
119896)minus1
119911119894
119896and (119867119894
119896)119879
(119877119894
119896)minus1
119867119894
119896as innovation
pair lowastlowastWhere 119894 and 1198901198940are the filtering error and initial error for node 119894 respectively 120574 is the disturbance attenuation level and V represents noise while 119878119894 is
the given positive definite matrix
31 Consensus on Estimates Theconsensus approach belong-ing to the first group is the consensus on estimates (CE)in which only state estimates are averaged out to reachconsensus It is the most basic consensus filtering approachin the early stage of CE (
119894(119905) = sum
119895isin119873119894
119886119894119895(119909
119895(119905) minus 119909
119894(119905)) +
sum119895isin119869119894
119886119894119895(119906
119895(119905) minus 119909
119894(119905)) where 119909
119894(119905) and 119906
119894(119905) are the current
state and measurement of node 119894 resp 119873119894denotes the set
of neighbors of node 119894 while 119869119894denotes the set of inclusive
neighbors of node 119894 and 119886119894119895is the (119894 119895) entry of the adjacency
matrix of the associated communication graph) [19] eachsensor node was treated as an agent and with this respectthe full-fledged consensus theory in multiagent systems canbe directly applied to the distributed filters plus one extraconsensus term to reflect the measurement features Thisconsensus algorithmwas furthermodified to theKalman-likedistributed estimator that combined updated state estimateand consensus term which is also called Kalman consensusfilter [22 23] It should be noticed that the CE is not limitedto the Kalman-like filters (following the same definition as in[23] we refer to any recursive estimator that has the similarfilter structure as Kalman filter as Kalman-like filters) infact the well-known 119867
infinconsensus can also be included
in this group However due to its ever-growing importanceand influence in a variety of engineering areas we treat itas a separate consensus filtering approach for the purpose ofbetter discussing these issues
From the algorithm perspective it does not necessarilyrequire the information of local error covariance matrix orlocal probability density functions It is no wonder that CEand its variants have been employed to design an extensivebody of consensus filters see for example [12 23 66ndash72]
For instance by using the consensus strategy [66] hasconstructed a local estimate based on its own measurementsand on the estimates from its neighbors and [67] hasintroduced a consensus-based filter that can provide reliableestimate despite of the existence of missing observations andcommunication faults In [68] with the help of the theoryof synchronization and consensus in complex networks andsystems a novel CE consensus has been born with thepinning observers Further a CE term has been embeddedin the penalty function [69 Equation (10)] to increase theaccuracy of the local estimates which is fundamental toguarantee convergence of the state estimates to the state ofthe observed system More specifically [12] has devised aconsensus filter in two steps In the first step an updatewas produced using a Luenberger-type observer In thesecond step called consensus step every sensor computeda convex combination between its local update and theupdates received from its neighbors Meanwhile in [70] twodifferent distributed consensus filters have been integrated inthe proposed distributed sensor fusion algorithm to achievecooperative sensing among sensor nodes Recently based onthe CE [71] has designed two types of consensus filters fortarget tracking problem over heterogeneous sensor networksand their unbiasedness and optimality were discussed as wellLastly [72] has presented a decentralized observer with aconsensus filter that blended with its neighborhood so thatthe state estimate of each agent can reach consensus after 119903
times of iterations at each time interval
32 Consensus on Measurements The CE does not involvethe error covariance matrices which may lead to certaindegree of conservatism in designing consensus filter within
6 Discrete Dynamics in Nature and Society
the Kalman-like filter framework It is well known that theerror covariance matrices may contain valuable informationwhich has been successfully used to improve the filterperformance Taking this into account another consensusapproach that is consensus on measurements (CM) isproposed for fulfilling this requirement It performs a con-sensus on local measurements or more specifically localinnovation pairs so as to approximate in a distributed waythe correction step of the centralized Kalman filter It isworth noticing that the stability of CM consensus filteringcan be ensured only when a sufficiently large number ofconsensus steps are carried out during each sampling intervalso that the local information provided by the innovationpairs has time to spread throughout the whole networkBesides this kind of approach relies on the assumption thatthe measurement errors coming from different sensors aremutually independent and this approach is limited to theKalman-like filters
During the last decade the CM has been broadly used inboth the signal processing and control communities see forexample [20 22 73ndash77]The idea of CMconsensus originallyappeared in [20] to solve the data fusion problems in adistributed way by using low-pass and band-pass consensusfilters A modified version of this consensus approach waspresented in [22Algorithm 1] where two identical consensusfilters were employed and it is applicable to sensor networkwith different observation matrices Further [73] showedthat CM can guarantee that the local estimates of the errorcovariance matrix and local estimates of the state convergeto their centralized ones Later this consensus approach wasapplied to design consensus filter for jump Markov systems[74] and discrete-time nonlinear systems with non-Gaussiannoise [75] In a following paper [76] a pseudo-measurementmatrix was reconstructed by embedding a statistical linearerror propagation approach [78] which facilitates the use ofCM in the unscented Kalman filtering fashion Recently CMwas interpreted as likelihood consensus and applied to thedistributed particle filtering setting [77]
33 Consensus on Information Due to the facts that onlyone or few consensus iterations per time can be affordedin order to reduce the communication overhead for higherenergy efficiency in particular wireless sensor network envi-ronment and there could not be enough time to wait forCM to convergence [79] consequently an alternative con-sensus approach namely consensus on information (CI)was recently invented to circumvent these issues From analgorithm standpoint CI is nothing but forming a localaverage on information matrices and information vectorsThe approach can guarantee stability for any number ofconsensus steps (even for single one) but its mean-squaredestimation error performance may be hampered since thefusion rule adopts a conservative point of view by assumingthat the correlations between local estimates are completelyunknown [28] It was originally introduced in [25] for adistributed state estimation problem later a mathematicalrigorous treatment of it was detailed in [24] where CIis interpreted as a consensus on probability density func-tions in the Kullback-Leibler average sense Following the
same consensus paradigm [10] presented a novel consensuscardinalized probability hypothesis density filter to studythe distributed multitarget tracking problem over a sensornetwork and [80] designed a consensus-based multiple-model Bayesian filter for the distributed tracking task of amaneuvering target More recently [81] applied CI to designthe distributed unscented Kalman filters for systems withstate saturations and sensor saturations
34 119867infin
Consensus It should be pointed out that the afore-mentioned consensus filtering algorithms are mainly basedon the traditional Kalman filtering theory which requiresthe statistic information about plant model to be knownperfectly unfortunately the practical systems are oftenaccompanied with parameter uncertainties and exogenousdisturbances Consequently there is a great impetus todevelop consensus filtering scheme as robust as possibleWith these needs considered the 119867
infinconsensus has been
recently introduced and has been widely recognized see forexample [11 26 82ndash88]
The term 119867infin
consensus was officially coined by [11]the main intuition behind it arises from the notion of 119867
infin
disagreement between adjacent nodes to quantify consensusperformance of the filter network [85] In [11] the 119867
infin
consensus performance requirement has been defined toquantify bounded consensus regarding the filtering errors(agreements) over a finite horizon the paper has con-sidered a distributed 119867
infinconsensus filtering problem for
sensor networks with multiple missing measurements In thesimilar vein [26] has studied the distributed 119867
infinfiltering
with randomly occurring saturation and successive packetdropout Furthermore the119867
infinconsensus approach has been
utilized for solving control problems of multiagent systemsfor example in a novel fuzzy model setting [83] and systemwith missing measurements [82] Most recently [84] has putforward distributed event-triggered 119867
infinconsensus filtering
problems in mobile sensor networks where the transmissionof each sensor was triggered by an event At about thesame time as [11] Ugrinovskii followed a different path toinvestigate the 119867
infinconsensus by using vector dissipativity
methodology see for example [85ndash88] For instance bypursuing 119867
infinconsensus on estimates the distributed robust
filtering problems have been discussed for uncertain systemswith measurement uncertainty [85] a nonvanishing nonlin-ear disturbance with unbounded energy [86] and switchingtopologies [87] lately [88] has laid out 119867
infinconsensus-
based synchronization protocol scheduled for each agent tosynchronize with a reference parameter-varying system
4 Latest Progress
Very recently the research on multisensor fusion and con-sensus filtering is receiving an increasing attention manyinspiring results have been published Here we highlightsome of the newest work with respect to this topic
(1) Fusion with Incomplete Information Due to limitedcapacity of signal transmission through networkedsystems the incomplete information [89] (such as
Discrete Dynamics in Nature and Society 7
missing measurement packet dropout quantiza-tion saturation and networked-induced delay) isinevitable in most of real implementations Thesephenomena may potentially deteriorate the systemperformance accordingly the multisensor fusion forsystems with incomplete information becomes pop-ular For example [90] has developed fusion strate-gies for communication between the sensors andthe estimation center was subject to random packetloss When sensors experience randomly delayedmeasurements and sensor failures [91] has deviseda robust information fusion estimator Lastly [92]has designed an optimal distributed fusion Kalmanfilter with the consideration of missing sensor mea-surements random transmission delays and packetdropouts Very recently [93] was concerned with thedistributed Kalman filtering problem for a class ofnetworked multisensor fusion systems with commu-nication bandwidth constraints
(2) Hybrid CMCI In [28] a new class of consensusfilters (named Hybrid CMCI) which enjoy the com-plementary benefits from two existing consensusfiltering approaches that is CM and CI have beenintroduced for distributed state estimation over sen-sor networks The results have claimed that underminimal requirements (ie collective observabilityand network connectivity) the guaranteed stabilityof the Hybrid CMCI filter can be achieved The ideafirst appeared in [94] more recently a mathematicalrigorous analysis of the Hybrid CMCI consensus forextended Kalman filtering setting has been given in[95]
(3) Set-Theoretic Consensus In [96] under the assump-tion of unknown but bounded measurement errorsa set-theoreticset-membership consensus has beenformulated in a set-theoretic framework Further thepaper has analyzed the consensus algorithms in thecase of undirected and stationary communicationgraphs The result has shown that for both types ofprotocols asymptotic consensus cannot be guaran-teed with respect to all possible noise realizations butthe disagreement among the agent states is asymptot-ically bounded
(4) WeightedAverageConsensus-BasedUnscentedKalmanFiltering Reference [97] has investigated the consen-sus-based distributed state estimation problems fora class of sensor networks within the unscentedKalman filter framework Without approximatinga pseudo-measurement matrix a weighted averageconsensus-based unscented Kalman filtering algo-rithm has been developed which directly imple-mented consensus on state vectors and error covari-ance matrices and its estimation error was proven tobe bounded in mean square
(5) Distributed 119867infin
Consensus Filtering for PiecewiseDiscrete-Time Linear Systems Reference [98] has
studied the distributed 119867infin
consensus filtering prob-lem for a class of piecewise discrete-time linearsystems First the modes and their transitions of aug-mented piecewise linear systems as well as distributedfilters have been formulated Next the structure ofaugmented distributed filter gains has been presentedin virtue of the adjacent matrix of sensor networksBesides a set of sufficient conditions have beenprovided for the distributed filter to ensure that itsdynamics were global asymptotically stable with the119867
infinconsensus performance constraint
(6) Distributed Kalman Consensus Filter with Intermit-tent Observations Reference [99] has considered thedistributed state estimation problem for linear time-varying systems with intermittent observations Inthe paper an optimal Kalman consensus filter hasbeen developed by minimizing the mean-squaredestimation error for each node To derive a scalablealgorithm for the covariance matrices update a sub-optimal filter has also been proposed by omitting theedge covariance matrices among nodes Besides asufficient condition was presented for ensuring thestochastic stability of the suboptimal filter by usingthe Lyapunov-based approach
(7) Information Weighted Consensus As noted in [8]the consensus estimate is suboptimal when the crosscovariances between the individual state estimatesacross different nodes are not incorporated in thedistributed filtering framework The cross covarianceis usually neglected because of the limitations ofthe computational and bandwidth requirements Assuch a consensus filtering scheme should guaranteeconvergence to the optimal centralized estimate aswell as maintaining low computation and commu-nication resource requirements Motivated by theabove discussions [8] has proposed the informationweighted consensus algorithm which can secure theoptimal estimate by proper weighting of the priorstate and measurement information
5 Conclusion and Future Directions
In this paper we have introduced both classic results andrecent advances developed inmultisensor fusion and consen-sus filtering First we recalled some important results in thedevelopment of multisensor fusion technology in particularmultisensor fusionwith unknown correlations Next we gavea systematic review of several consensus filtering approacheswhich are widely used to design consensus filter Furthersome latest progress on multisensor fusion and consensusfiltering was also presented To conclude this survey paperbased on the literature reviewed we will offer readers aglimpse of several future directions that may spark theirinterest
(1) Further Divide the Unknown Correlations Althoughthe reasons causing unknown correlations are abun-dant in many real situations we can obtain the par-tial information about unknowns such as uncertain
8 Discrete Dynamics in Nature and Society
system matrix [100 101] uncertain-covariance noise[102] nonfragile filter [103] and uncertain stochasticnonlinearity [100 104] which can be tackled byrobust filtering [100] extendedKalman filtering [105]recursive filtering [106] and 119867
infinrobust filtering
[107] Therefore according to the unknown nature ofunknown correlations it is necessary to further dividethem into two groups partial unknown correlationsand complete unknown correlations Based on thatit is possible to develop new fusion mechanisms orimprove the existing ones to get a better solution forfusion with unknown correlations
(2) Mathematical Characterization of Unknown Correla-tions Due to the intricate unknown nature most ofpublications involving unknown correlations are justlabeling the error cross covariance 119875
119894119895as unknown
without giving their structures which unfortunatelydid not capture the information of correlations andtheir fusion results are inevitably leading to certaindegree of conservatism Reference [57] has made afew attempts to provide an explicit characterizationfor unknown correlation however the derivation iscomplex and not intuitive Hence it is still an openquestion to get a general yet concise mathematicalmodel to describe the unknown correlations
(3) Consensus Filtering with Unknown Correlations Theunknown correlations are ubiquitously existing ingeneral distributed filtering problems they are alsothe major source for the ldquodata insectrdquo phenomenonin the network It is therefore of great importanceto study the consensus filtering problem for systemswith unknown correlations Despite its significancethe progress on this topic is slow Take the covari-ance intersection rule for example how to designconsensus filter which involves information matricesinformation vectors and optimal weights simultane-ouslywithout comprising its performance it would beanother interesting topic
(4) Hybrid Consensus The increasing complexity of sys-tem dynamics and high demands for filter perfor-mance call for the design of the consensus filterwhich should be as good as possible In this spiritthe hybrid consensus filtering scheme which bene-fits from different consensus approaches may meetthese requirements Although initial interests haveappeared in recent years see for example [94 95]it is a trend that more and more hybrid consensusfiltering schemes which blend two ormore consensusfiltering approaches will be constructed in the com-ing future
(5) Stochastic Stability Analysis of Kalman-Like ConsensusFilter In a Kalman-like filter there are two primarysources for error in the estimation initializationerror and stochastic errors due to the process andmeasurement noise [108] However most work hasignored the process and measurement noise whenanalyzing the stability of the consensus filter which is
hardly a reasonable treatmentThe stochastic stabilitylemma [109] may provide a possible solution and hasbeen used as an effective tool for analyzing the singleKalman-like filter see for example [109ndash112] but forthe distributed case its stochastic stability analysisremains to be established
(6) Beyond Consensus Even though the consensus isthe mostly used strategy for the distributed filteringproblems it may not be the best solution for certaincircumstance for example the diffusion strategy[113] is particularly suited for problems involving therecursive minimization of cost functions as opposedto consensus strategy It is therefore of significantengineering importance to find new strategy ormake a trade-off between different strategies for thedistributed filtering problems with new network-induced phenomena such as randomly occurringnonlinearities and fading measurements [114 115]
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the Royal Society of theUK theNational Natural Science Foundation of China underGrants 61329301 61374039 61304010 11301118 and 61573246the Hujiang Foundation of China under Grants C14002and D15009 the Alexander von Humboldt Foundation ofGermany and the Innovation Fund Project for GraduateStudent of Shanghai under Grant JWCXSL1401
References
[1] D L Hall and J Llinas ldquoAn introduction to multisensor datafusionrdquo Proceedings of the IEEE vol 85 no 1 pp 6ndash23 1997
[2] B Khaleghi A Khamis F O Karray and S N Razavi ldquoMulti-sensor data fusion a review of the state-of-the-artrdquo InformationFusion vol 14 no 1 pp 28ndash44 2013
[3] S-L Sun and Z-L Deng ldquoMulti-sensor optimal informationfusion Kalman filterrdquo Automatica vol 40 no 6 pp 1017ndash10232004
[4] R E Kalman ldquoA new approach to linear filtering and predictionproblemsrdquo Journal of Basic Engineering vol 82 no 1 pp 35ndash451960
[5] S J Julier and J K Uhlmann ldquoNon-divergent estimation algo-rithm in the presence of unknown correlationsrdquo in Proceedingsof the 16th American Control Conference vol 4 pp 2369ndash2373June 1997
[6] J K Uhlmann ldquoGeneral data fusion for estimates withunknown cross covariancesrdquo in Signal Processing Sensor Fusionand Target Recognition V vol 2755 of Proceedings of SPIE June1996
[7] Y Wang and X R Li ldquoDistributed estimation fusion withunavailable cross-correlationrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 48 no 1 pp 259ndash278 2012
Discrete Dynamics in Nature and Society 9
[8] A T Kamal J A Farrell and A K Roy-Chowdhury ldquoInfor-mation weighted consensus filters and their application indistributed camera networksrdquo IEEE Transactions on AutomaticControl vol 58 no 12 pp 3112ndash3125 2013
[9] V Ugrinovskii ldquoConditions for detectability in distributedconsensus-based observer networksrdquo IEEE Transactions onAutomatic Control vol 58 no 10 pp 2659ndash2664 2013
[10] G Battistelli L Chisci C Fantacci A Farina and A GrazianoldquoConsensus CPHD filter for distributed multitarget trackingrdquoIEEE Journal on Selected Topics in Signal Processing vol 7 no 3pp 508ndash520 2013
[11] B Shen Z Wang and Y S Hung ldquoDistributed 119867infin-consensus
filtering in sensor networks with multiple missing measure-ments the finite-horizon caserdquo Automatica vol 46 no 10 pp1682ndash1688 2010
[12] I Matei and J S Baras ldquoConsensus-based linear distributedfilteringrdquo Automatica vol 48 no 8 pp 1776ndash1782 2012
[13] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[14] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedings ofthe IEEE vol 95 no 1 pp 215ndash233 2007
[15] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[16] C Fantacci B-N Vo B-T Vo G Battistelli and L ChiscildquoConsensus labeled random finite set filtering for distributedmulti-objecttrackingrdquo httparxivorgabs150101579
[17] D P Spanos R Olfati-Saber and R M Murray ldquoApproximatedistributed kalman filtering in sensor networks with quan-tifiable performancerdquo in Proceedings of the 4th InternationalSymposium on Information Processing in Sensor Networks (IPSNrsquo05) pp 133ndash139 Pasadena Calif USA April 2005
[18] L Xiao S Boyd and S Lall ldquoA Scheme for robust distributedsensor fusion based on average consensusrdquo in Proceedings ofthe 4th International Symposium on Information Processing inSensor Networks (IPSN rsquo05) pp 63ndash70 April 2005
[19] R Olfati-Saber and J S Shamma ldquoConsensus filters for sensornetworks and distributed sensor fusionrdquo in Proceedings of the44th IEEE Conference on Decision and Control and EuropeanControl Conference (CDC-ECC rsquo05) pp 6698ndash6703 IEEEDecember 2005
[20] R Olfati-Saber ldquoDistributed Kalman filter with embeddedconsensus filtersrdquo in Proceedings of the 44th IEEE Conference onDecision and Control and European Control Conference (CDC-ECC rsquo05) pp 8179ndash8184 IEEE December 2005
[21] K J Astrom and P R Kumar ldquoControl a perspectiverdquo Auto-matica vol 50 no 1 pp 3ndash43 2014
[22] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control pp 5492ndash5498 IEEE New Orleans La USADecember 2007
[23] R Olfati-Saber ldquoKalman-consensus filter optimality stabilityand performancerdquo inProceedings of the 48th IEEEConference onDecision and Control 2009 Held Jointly with 2009 28th ChineseControl Conference pp 7036ndash7042 Shanghai ChinaDecember2009
[24] G Battistelli and L Chisci ldquoKullbackndashLeibler average consen-sus on probability densities and distributed state estimation
with guaranteed stabilityrdquo Automatica vol 50 no 3 pp 707ndash718 2014
[25] G Battistelli L Chisci M Stefano and P Francesco ldquoAninformation-theoretic approach to distributed state estimationrdquoin Proceedings of the 18th IFACWorld Congress pp 12477ndash12482Milan Italy August 2011
[26] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
[27] W Yang G Chen X Wang and L Shi ldquoStochastic sensor acti-vation for distributed state estimation over a sensor networkrdquoAutomatica vol 50 no 8 pp 2070ndash2076 2014
[28] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based linear and nonlinear filteringrdquo IEEE Trans-actions on Automatic Control vol 60 no 5 pp 1410ndash1415 2015
[29] N Friedman Seapower as Strategy Navies and National Inter-ests Naval Institute Press 2001
[30] R Singer and A Kanyuck ldquoComputer control of multiple sitetrack correlationrdquo Automatica vol 7 no 4 pp 455ndash463 1971
[31] A S Willsky M G Bello D A Castanon B C Levy andG C Verghese ldquoCombining and updating of local estimatesand regional maps along sets of one-dimensional tracksrdquo IEEETransactions on Automatic Control vol 27 no 4 pp 799ndash8131982
[32] N A Carlson ldquoFederated square root filter for decentralizedparallel processorsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 26 no 3 pp 517ndash525 1990
[33] S Roy and R A Iltis ldquoDecentralized linear estimation incorrelatedmeasurement noiserdquo IEEE Transactions on Aerospaceand Electronic Systems vol 27 no 6 pp 939ndash941 1991
[34] Y Bar-Shalom and L Campo ldquoThe effect of the commonprocess noise on the two-sensor fused-track covariancerdquo IEEETransactions on Aerospace and Electronic Systems vol AES-22no 6 pp 803ndash805 1986
[35] K H Kim ldquoDevelopment of track to track fusion algorithmsrdquoin Proceedings of the 13th American Control Conference vol 1pp 1037ndash1041 Baltimore Md USA June 1994
[36] X R Li Y Zhu JWang andCHan ldquoOptimal linear estimationfusionmdashpart I unified fusion rulesrdquo IEEE Transactions onInformation Theory vol 49 no 9 pp 2192ndash2323 2003
[37] Z-L Deng Y Gao LMao Y Li and G Hao ldquoNew approach toinformation fusion steady-state Kalman filteringrdquo Automaticavol 41 no 10 pp 1695ndash1707 2005
[38] D-J Lee ldquoNonlinear estimation and multiple sensor fusionusing unscented information filteringrdquo IEEE Signal ProcessingLetters vol 15 pp 861ndash864 2008
[39] E Song J Xu and Y Zhu ldquoOptimal distributed Kalmanfiltering fusion with singular covariances of filtering errors andmeasurement noisesrdquo IEEE Transactions on Automatic Controlvol 59 no 5 pp 1271ndash1282 2014
[40] W-A Zhang G Feng and L Yu ldquoMulti-rate distributed fusionestimation for sensor networks with packet lossesrdquoAutomaticavol 48 no 9 pp 2016ndash2028 2012
[41] W-A Zhang S Liu and L Yu ldquoFusion estimation for sensornetworks with nonuniform estimation ratesrdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 61 no 5 pp 1485ndash1498 2014
[42] T D Garvey J D Lowrance and M A Fischler ldquoAn inferencetechnique for integrating knowledge from disparate sourcesrdquoin Proceedings of the International Joint Conference on ArtificialIntelligence pp 319ndash325 Vancouver Canada August 1981
10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 3
nodes of the network are communicated over a connecteddigraph G = (NE) where N = 1 2 119899 is the set ofsensor nodes and E denotes the set of connections betweennodes An edge (119894 119895) isin E indicates that node 119895 can receiveinformation from node 119894 Further if node 119894 is included in itsneighbors we denote it as N
119894(N
119894= 119895 | (119895 119894) isin E) and
otherwise we denote it asN119894 119894 The notation |N| denotes
the cardinality of theN
2 Multisensor Fusion
The development of multisensor fusion was originally trig-gered by the demands from military area Later numerousapplications in nonmilitary areas provided another impetusto the multisensor fusion technology In this section weinvestigate the most commonly used multisensor fusiontechniques for the local estimation errors with correlationswithout correlations or with unknown correlations Theimportant fusion rules for those three types are listed inTable 1 where (119909
119894 119875
119894)119894isinN and (119909
119891 119875
119891) are local and fused
estimate and error covariance pair respectively Let us nowconduct a systematic review on the development of multisen-sor fusion technology during the past few decades
21 Multisensor Fusion At the beginning of the 1970s theUS navy merged data about Soviet naval movements at datafusion centers the result turned out to be more accuratethan using data from single sonar [29] This discovery hasheralded the research on multisensor fusion since thenvoluminous results have been published during the pastseveral decades see for example [3 30ndash39] For examplein 1971 the multisensor fusion problem was first studiedin [30] where the estimation errors in two track files fromdifferent sensors but corresponding to the same target wereassumed to be independent Later more general cases canbe found in [31 32] including Carlsonrsquos federated square rootfilter [32] Moreover a decentralized linear estimator in thepresence of correlatedmeasurement noise was constructed in[33] Further in 1986 [34] came up with a fusion equationwith the consideration of cross covariance between localestimates In 1994 [35] generalized the results in [34] andan optimal fusion equation was deduced in the sense ofmaximum likelihood estimate but the posterior probabilitydensity function should be of the standard normal densityfunction Ten years later this limitation was overcome by [3]where an optimal information fusion criterion was rederivedin the linear minimum variance sense with the help ofLagrange multiplier from the mathematical point of viewthis fusion rule is equivalent to the best linear unbiasedestimation fusion rule in [36] or weighted least squaresfusion rule in [37] In a recent paper [38] amultisensor fusionschemewas devised specifically for nonlinear estimate withinthe unscentedKalman filtering frameworkMore recently forthe case of singular estimation errors covariances and mea-surement noises covariances an optimal distributed Kalmanfiltering fusion strategy was proposed in [39] Besides ifthe local estimates are generated with different rates thecorresponding multirate fusion results were given in [40 41]
Table 1 Multisensor fusion rules
Types of estimationerrors Fusion rules Comments
No correlations(independent)
119875119891= (
119899
sum
119894=1
119875minus1
119894)
minus1
119909119891= 119875
119891(
119899
sum
119894=1
119875minus1
119894119909119894)
Optimal
Known correlations(correlated)
119875119891= (119890
119879
Σminus1
119890)minus1
lowast
119909119891= 119875
119891(119890
119879
Σminus1
119909)lowast
Optimal
Unknown correlations(unknown correlated)
119875119891= (
119899
sum
119894=1
120596119894119875minus1
119894)
minus1lowastlowast
119909119891= 119875
119891(
119899
sum
119894=1
120596119894119875minus1
119894119909119894)
lowastlowastSuboptimal
lowast
119890 = [119868 119868]119879 Σ = (119875
119894119895) 119894 119895 = 1 119899 and 119909 = [119909
119879
1 119909
119879
119899]119879
lowastlowastCovariance intersection rule where 120596119894isin [0 1] sum119899
119894=1120596119894= 1 and 120596
119894=
argmin120596119894isin[01]
tr119875119891
Nowadays with the rapid development of sensor networktechnology the multisensor fusion over sensor network hasbecome an active research area Recently the focus of themultisensor fusion has been shifted from centralized fusionto distributed one mainly due to the scalability robust-ness to failure structure flexibility and less communicationresources of the distributed sensor networks see for exam-ple [17 18] For instance [17] has proposed a distributedmultisensor fusion scheme that allows the nodes of a sensornetwork to track the average of inverse-covariance-weightedmeasurements and inverse-covariancematrices so as to reachso-called dynamic average consensus Almost in the sametime [18] has also introduced a distributed multisensorfusion scheme based on average consensus what is differentis that the scheme diffuses information across the networkby updating each nodersquos data with a weighted average of itsneighbors which finally converges to the global maximum-likelihood estimate In fact it was these two papers that gaverise to the consensus filtering which is the next focus of thissurvey
It is worth noting that the above results are obtainedwithin the Kalman filtering framework (broadly speakingthe Bayesian framework) which is only a small fraction ofthe whole family of multisensor fusion techniques the otherframeworks may include but are not limit to evidential beliefreasoning [42] fuzzy reasoning [43] probabilistic fusion[44] hybrid fusion [45] and randomset theoretic fusion [46]the interested readers may consult the survey paper [2] formore details
22 Fusion with Unknown Correlations Unknown correla-tions [5] are often referred to as unknown cross covariances[6] or unavailable cross-correlations [7] The main causes ofunknown correlations can be categorized into the followingtwo groups
(1) Lack of knowledge of the true system
(i) Unidentified correlations for example corre-lations from the observation noises as yet
4 Discrete Dynamics in Nature and Society
unidentified may occur during the movingprocess of vehicle which equipped a suite ofnavigation sensors [5]
(ii) Approximation implementation it is oftenassumed that the prior estimation error and thenewmeasurement error are uncorrelated whichmay introduce certain degree of unknowncorrelations in the final implementation [47]
(2) Correlations that are too difficult to describe
(i) Involving too many variables in the applicationslike map building and weather forecasting theprocessmodel could involve thousands of stateswhich means maintaining a full covariancematrix is impractical [5]
(ii) Data incest [24] or double counting problem[48] due to the presence of network loops theinformation is often inadvertently used severaltimes in a distributed fusion setting
(iii) Difficulty of calculation for example how toacquire reliable correlations in the nonlinearestimates is still an open question
To summarize it is widely believed that the unknowncorrelations ubiquitously exist in a diverse range of multi-sensor fusion problems Neglecting the effect of unknowncorrelations can result in grave consequence of performancedeterioration even divergence As such it has attracted andsustained attention from researchers for decades Howeverowing to the intricate unknown nature it is not easy tocome up with a satisfied scheme to address the fusionproblems with unknown correlations If we ignore the cor-relations directly which is the Naive fusion [49] it maylead to divergence of the filter To compensate this kindof divergence a normal suboptimal approach is to increasethe system noise artificially However this heuristic requiressubstantial certain expertise and compromises the integrityof the Kalman filter framework [50]
Among existing fusion solutions for systems withunknown correlations it was the covariance intersectionalgorithm [5] which was invented by Julier and Uhlmannin 1997 that provides an effective tool to tackle unknowncorrelations According to [51] the covariance intersectionfusion rule has the advantages lying in the following (i) Theidentification and computation of the cross covariances arecompletely avoided (ii) It yields a consistent fused estimateand thus a nondivergent filter is obtained (iii) The accuracyof the fused estimate outperforms each local one (iv) Itgives a common upper bound of actual estimation errorvariances which has robustness with respect to unknowncorrelations Since then it has attracted much interest from awider community see for example [7 49ndash64] Some of themfocused on improving the covariance intersection method-ology For instance a generalized covariance intersectionknown as split covariance intersection has been created in[52] for the purpose of incorporating known independentinformation Reference [53] has improved the main results
in [5] by investigating the linear combination gains in an 1198992-
dimensional space Meanwhile an information-theoreticaljustification of covariance intersection rule and its general-ization can be found in [54] and [55] respectively Later theChernoff fusion rule which includes covariance intersectionas a special case is also reviewed in [49] Recently [56 57]have separately proposed the largest ellipsoidal algorithmand ellipsoidal intersection state fusion method which leadto a higher accuracy for the fused estimate Moreover anaccuracy comparison between covariance intersection andthree different optimal fusion rules has been presented in[58] while the others turned to apply covariance intersectionalgorithm to a plethora of areas such as target tracking [7]fault-tolerant estimate [59] simultaneous localization andmapping [60] image fusion [61] vehicle localization [62] andNASAMars rover [63]
One of the significant drawbacks of covariance intersec-tion algorithm and its variants is the computation burdenWhen the number of information sources to be fused ismore than 2 this problem is exactly a nonlinear optimizationproblem with constraints in Euclidean space R119899 and itrapidly becomes computationally intractable especially inlarge distributed sensor networks Therefore there is a greatneed to develop fast covariance intersection algorithm tocircumvent this issue Fortunately there are several solutionsthat have been reported in this spirit One of them is thesequential covariance intersection [51] where the multidi-mension nonlinear optimization problem was reduced tothe optimization of several one-dimensional nonlinear costfunctions by batch processing procedureThe secondmethodis the suboptimal noniterative algorithm [50] the methodhas been further used in [64] for designing a diffusionKalman filtering scheme and [7] for an information-theoreticinterpretation The third one is the ellipsoidal intersection[57] where the obtained algebraic fusion formulas made itcomputationally feasible Different from the above methodstrying to approximate the optimal value the fourth solutioncan give an exact solution of the optimal weights in caseof low-dimensional covariance matrices by the close-formoptimization of covariance intersection [65] which reducedthe nonlinear optimization problem into the polynomialroot-finding problem
3 Consensus Filtering Approaches
This section gives a systematic overview of recent advanceson several consensus approaches which are suitable to designconsensus-based filters In general most of the publicationson consensus filtering approaches can be classified intofour groups consensus on estimates (CE) consensus onmeasurements (CM) consensus on information (CI) and119867
infinconsensus the mechanisms of these four types of con-
sensus filtering approaches for the typical linear time-varyingsystems with multiple sensor observations are depicted inTable 2 In the following we will take a deep investigation ofthese consensus filtering approaches one by one in order toinspire more research interest
Discrete Dynamics in Nature and Society 5
Table 2 The mechanisms of four consensus filtering approaches
Types Structures of consensus filterslowast References
CE119909119894
119896= 119909
119894
119896|119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896|119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896|119896minus1)
[22 23]
CMΩ
119894
119896|119896= Ω
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896
119902119894
119896|119896= 119902
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896
[20 22]
CIΩ
119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[Ω
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896]
119902119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[119902
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896]
[24 25]
119867infin
consensus
119909119894
119896= 119860
119896119909119894
119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896minus1)
1
119899sum
119894isinN
1003817100381710038171003817100381711989410038171003817100381710038171003817
2
le 1205742
V22+
1
119899sum
119894isinN
(119890119894
0)119879
119878119894
119890119894
0
lowastlowast
[11 26]
lowastThroughout the table 119860119896is the systems matrix For each node 119894 119867119894
119896 119877119894
119896 and 119911
119894
119896are respectively measurement matrix covariance matrix of measurement
noise and measurement output 119870119894
119896and 119862
119894
119896are the filter and consensus gains to be determined and 120587
119894119895
119871119896is the consensus weight after 119871 step consensus
Further denote Ω119896|119896
≜ (119875119896|119896)minus1 and 119902
119896|119896= (119875
119896|119896)minus1
119909119896|119896
as information matrix and information vector and (119867119894
119896)119879
(119877119894
119896)minus1
119911119894
119896and (119867119894
119896)119879
(119877119894
119896)minus1
119867119894
119896as innovation
pair lowastlowastWhere 119894 and 1198901198940are the filtering error and initial error for node 119894 respectively 120574 is the disturbance attenuation level and V represents noise while 119878119894 is
the given positive definite matrix
31 Consensus on Estimates Theconsensus approach belong-ing to the first group is the consensus on estimates (CE)in which only state estimates are averaged out to reachconsensus It is the most basic consensus filtering approachin the early stage of CE (
119894(119905) = sum
119895isin119873119894
119886119894119895(119909
119895(119905) minus 119909
119894(119905)) +
sum119895isin119869119894
119886119894119895(119906
119895(119905) minus 119909
119894(119905)) where 119909
119894(119905) and 119906
119894(119905) are the current
state and measurement of node 119894 resp 119873119894denotes the set
of neighbors of node 119894 while 119869119894denotes the set of inclusive
neighbors of node 119894 and 119886119894119895is the (119894 119895) entry of the adjacency
matrix of the associated communication graph) [19] eachsensor node was treated as an agent and with this respectthe full-fledged consensus theory in multiagent systems canbe directly applied to the distributed filters plus one extraconsensus term to reflect the measurement features Thisconsensus algorithmwas furthermodified to theKalman-likedistributed estimator that combined updated state estimateand consensus term which is also called Kalman consensusfilter [22 23] It should be noticed that the CE is not limitedto the Kalman-like filters (following the same definition as in[23] we refer to any recursive estimator that has the similarfilter structure as Kalman filter as Kalman-like filters) infact the well-known 119867
infinconsensus can also be included
in this group However due to its ever-growing importanceand influence in a variety of engineering areas we treat itas a separate consensus filtering approach for the purpose ofbetter discussing these issues
From the algorithm perspective it does not necessarilyrequire the information of local error covariance matrix orlocal probability density functions It is no wonder that CEand its variants have been employed to design an extensivebody of consensus filters see for example [12 23 66ndash72]
For instance by using the consensus strategy [66] hasconstructed a local estimate based on its own measurementsand on the estimates from its neighbors and [67] hasintroduced a consensus-based filter that can provide reliableestimate despite of the existence of missing observations andcommunication faults In [68] with the help of the theoryof synchronization and consensus in complex networks andsystems a novel CE consensus has been born with thepinning observers Further a CE term has been embeddedin the penalty function [69 Equation (10)] to increase theaccuracy of the local estimates which is fundamental toguarantee convergence of the state estimates to the state ofthe observed system More specifically [12] has devised aconsensus filter in two steps In the first step an updatewas produced using a Luenberger-type observer In thesecond step called consensus step every sensor computeda convex combination between its local update and theupdates received from its neighbors Meanwhile in [70] twodifferent distributed consensus filters have been integrated inthe proposed distributed sensor fusion algorithm to achievecooperative sensing among sensor nodes Recently based onthe CE [71] has designed two types of consensus filters fortarget tracking problem over heterogeneous sensor networksand their unbiasedness and optimality were discussed as wellLastly [72] has presented a decentralized observer with aconsensus filter that blended with its neighborhood so thatthe state estimate of each agent can reach consensus after 119903
times of iterations at each time interval
32 Consensus on Measurements The CE does not involvethe error covariance matrices which may lead to certaindegree of conservatism in designing consensus filter within
6 Discrete Dynamics in Nature and Society
the Kalman-like filter framework It is well known that theerror covariance matrices may contain valuable informationwhich has been successfully used to improve the filterperformance Taking this into account another consensusapproach that is consensus on measurements (CM) isproposed for fulfilling this requirement It performs a con-sensus on local measurements or more specifically localinnovation pairs so as to approximate in a distributed waythe correction step of the centralized Kalman filter It isworth noticing that the stability of CM consensus filteringcan be ensured only when a sufficiently large number ofconsensus steps are carried out during each sampling intervalso that the local information provided by the innovationpairs has time to spread throughout the whole networkBesides this kind of approach relies on the assumption thatthe measurement errors coming from different sensors aremutually independent and this approach is limited to theKalman-like filters
During the last decade the CM has been broadly used inboth the signal processing and control communities see forexample [20 22 73ndash77]The idea of CMconsensus originallyappeared in [20] to solve the data fusion problems in adistributed way by using low-pass and band-pass consensusfilters A modified version of this consensus approach waspresented in [22Algorithm 1] where two identical consensusfilters were employed and it is applicable to sensor networkwith different observation matrices Further [73] showedthat CM can guarantee that the local estimates of the errorcovariance matrix and local estimates of the state convergeto their centralized ones Later this consensus approach wasapplied to design consensus filter for jump Markov systems[74] and discrete-time nonlinear systems with non-Gaussiannoise [75] In a following paper [76] a pseudo-measurementmatrix was reconstructed by embedding a statistical linearerror propagation approach [78] which facilitates the use ofCM in the unscented Kalman filtering fashion Recently CMwas interpreted as likelihood consensus and applied to thedistributed particle filtering setting [77]
33 Consensus on Information Due to the facts that onlyone or few consensus iterations per time can be affordedin order to reduce the communication overhead for higherenergy efficiency in particular wireless sensor network envi-ronment and there could not be enough time to wait forCM to convergence [79] consequently an alternative con-sensus approach namely consensus on information (CI)was recently invented to circumvent these issues From analgorithm standpoint CI is nothing but forming a localaverage on information matrices and information vectorsThe approach can guarantee stability for any number ofconsensus steps (even for single one) but its mean-squaredestimation error performance may be hampered since thefusion rule adopts a conservative point of view by assumingthat the correlations between local estimates are completelyunknown [28] It was originally introduced in [25] for adistributed state estimation problem later a mathematicalrigorous treatment of it was detailed in [24] where CIis interpreted as a consensus on probability density func-tions in the Kullback-Leibler average sense Following the
same consensus paradigm [10] presented a novel consensuscardinalized probability hypothesis density filter to studythe distributed multitarget tracking problem over a sensornetwork and [80] designed a consensus-based multiple-model Bayesian filter for the distributed tracking task of amaneuvering target More recently [81] applied CI to designthe distributed unscented Kalman filters for systems withstate saturations and sensor saturations
34 119867infin
Consensus It should be pointed out that the afore-mentioned consensus filtering algorithms are mainly basedon the traditional Kalman filtering theory which requiresthe statistic information about plant model to be knownperfectly unfortunately the practical systems are oftenaccompanied with parameter uncertainties and exogenousdisturbances Consequently there is a great impetus todevelop consensus filtering scheme as robust as possibleWith these needs considered the 119867
infinconsensus has been
recently introduced and has been widely recognized see forexample [11 26 82ndash88]
The term 119867infin
consensus was officially coined by [11]the main intuition behind it arises from the notion of 119867
infin
disagreement between adjacent nodes to quantify consensusperformance of the filter network [85] In [11] the 119867
infin
consensus performance requirement has been defined toquantify bounded consensus regarding the filtering errors(agreements) over a finite horizon the paper has con-sidered a distributed 119867
infinconsensus filtering problem for
sensor networks with multiple missing measurements In thesimilar vein [26] has studied the distributed 119867
infinfiltering
with randomly occurring saturation and successive packetdropout Furthermore the119867
infinconsensus approach has been
utilized for solving control problems of multiagent systemsfor example in a novel fuzzy model setting [83] and systemwith missing measurements [82] Most recently [84] has putforward distributed event-triggered 119867
infinconsensus filtering
problems in mobile sensor networks where the transmissionof each sensor was triggered by an event At about thesame time as [11] Ugrinovskii followed a different path toinvestigate the 119867
infinconsensus by using vector dissipativity
methodology see for example [85ndash88] For instance bypursuing 119867
infinconsensus on estimates the distributed robust
filtering problems have been discussed for uncertain systemswith measurement uncertainty [85] a nonvanishing nonlin-ear disturbance with unbounded energy [86] and switchingtopologies [87] lately [88] has laid out 119867
infinconsensus-
based synchronization protocol scheduled for each agent tosynchronize with a reference parameter-varying system
4 Latest Progress
Very recently the research on multisensor fusion and con-sensus filtering is receiving an increasing attention manyinspiring results have been published Here we highlightsome of the newest work with respect to this topic
(1) Fusion with Incomplete Information Due to limitedcapacity of signal transmission through networkedsystems the incomplete information [89] (such as
Discrete Dynamics in Nature and Society 7
missing measurement packet dropout quantiza-tion saturation and networked-induced delay) isinevitable in most of real implementations Thesephenomena may potentially deteriorate the systemperformance accordingly the multisensor fusion forsystems with incomplete information becomes pop-ular For example [90] has developed fusion strate-gies for communication between the sensors andthe estimation center was subject to random packetloss When sensors experience randomly delayedmeasurements and sensor failures [91] has deviseda robust information fusion estimator Lastly [92]has designed an optimal distributed fusion Kalmanfilter with the consideration of missing sensor mea-surements random transmission delays and packetdropouts Very recently [93] was concerned with thedistributed Kalman filtering problem for a class ofnetworked multisensor fusion systems with commu-nication bandwidth constraints
(2) Hybrid CMCI In [28] a new class of consensusfilters (named Hybrid CMCI) which enjoy the com-plementary benefits from two existing consensusfiltering approaches that is CM and CI have beenintroduced for distributed state estimation over sen-sor networks The results have claimed that underminimal requirements (ie collective observabilityand network connectivity) the guaranteed stabilityof the Hybrid CMCI filter can be achieved The ideafirst appeared in [94] more recently a mathematicalrigorous analysis of the Hybrid CMCI consensus forextended Kalman filtering setting has been given in[95]
(3) Set-Theoretic Consensus In [96] under the assump-tion of unknown but bounded measurement errorsa set-theoreticset-membership consensus has beenformulated in a set-theoretic framework Further thepaper has analyzed the consensus algorithms in thecase of undirected and stationary communicationgraphs The result has shown that for both types ofprotocols asymptotic consensus cannot be guaran-teed with respect to all possible noise realizations butthe disagreement among the agent states is asymptot-ically bounded
(4) WeightedAverageConsensus-BasedUnscentedKalmanFiltering Reference [97] has investigated the consen-sus-based distributed state estimation problems fora class of sensor networks within the unscentedKalman filter framework Without approximatinga pseudo-measurement matrix a weighted averageconsensus-based unscented Kalman filtering algo-rithm has been developed which directly imple-mented consensus on state vectors and error covari-ance matrices and its estimation error was proven tobe bounded in mean square
(5) Distributed 119867infin
Consensus Filtering for PiecewiseDiscrete-Time Linear Systems Reference [98] has
studied the distributed 119867infin
consensus filtering prob-lem for a class of piecewise discrete-time linearsystems First the modes and their transitions of aug-mented piecewise linear systems as well as distributedfilters have been formulated Next the structure ofaugmented distributed filter gains has been presentedin virtue of the adjacent matrix of sensor networksBesides a set of sufficient conditions have beenprovided for the distributed filter to ensure that itsdynamics were global asymptotically stable with the119867
infinconsensus performance constraint
(6) Distributed Kalman Consensus Filter with Intermit-tent Observations Reference [99] has considered thedistributed state estimation problem for linear time-varying systems with intermittent observations Inthe paper an optimal Kalman consensus filter hasbeen developed by minimizing the mean-squaredestimation error for each node To derive a scalablealgorithm for the covariance matrices update a sub-optimal filter has also been proposed by omitting theedge covariance matrices among nodes Besides asufficient condition was presented for ensuring thestochastic stability of the suboptimal filter by usingthe Lyapunov-based approach
(7) Information Weighted Consensus As noted in [8]the consensus estimate is suboptimal when the crosscovariances between the individual state estimatesacross different nodes are not incorporated in thedistributed filtering framework The cross covarianceis usually neglected because of the limitations ofthe computational and bandwidth requirements Assuch a consensus filtering scheme should guaranteeconvergence to the optimal centralized estimate aswell as maintaining low computation and commu-nication resource requirements Motivated by theabove discussions [8] has proposed the informationweighted consensus algorithm which can secure theoptimal estimate by proper weighting of the priorstate and measurement information
5 Conclusion and Future Directions
In this paper we have introduced both classic results andrecent advances developed inmultisensor fusion and consen-sus filtering First we recalled some important results in thedevelopment of multisensor fusion technology in particularmultisensor fusionwith unknown correlations Next we gavea systematic review of several consensus filtering approacheswhich are widely used to design consensus filter Furthersome latest progress on multisensor fusion and consensusfiltering was also presented To conclude this survey paperbased on the literature reviewed we will offer readers aglimpse of several future directions that may spark theirinterest
(1) Further Divide the Unknown Correlations Althoughthe reasons causing unknown correlations are abun-dant in many real situations we can obtain the par-tial information about unknowns such as uncertain
8 Discrete Dynamics in Nature and Society
system matrix [100 101] uncertain-covariance noise[102] nonfragile filter [103] and uncertain stochasticnonlinearity [100 104] which can be tackled byrobust filtering [100] extendedKalman filtering [105]recursive filtering [106] and 119867
infinrobust filtering
[107] Therefore according to the unknown nature ofunknown correlations it is necessary to further dividethem into two groups partial unknown correlationsand complete unknown correlations Based on thatit is possible to develop new fusion mechanisms orimprove the existing ones to get a better solution forfusion with unknown correlations
(2) Mathematical Characterization of Unknown Correla-tions Due to the intricate unknown nature most ofpublications involving unknown correlations are justlabeling the error cross covariance 119875
119894119895as unknown
without giving their structures which unfortunatelydid not capture the information of correlations andtheir fusion results are inevitably leading to certaindegree of conservatism Reference [57] has made afew attempts to provide an explicit characterizationfor unknown correlation however the derivation iscomplex and not intuitive Hence it is still an openquestion to get a general yet concise mathematicalmodel to describe the unknown correlations
(3) Consensus Filtering with Unknown Correlations Theunknown correlations are ubiquitously existing ingeneral distributed filtering problems they are alsothe major source for the ldquodata insectrdquo phenomenonin the network It is therefore of great importanceto study the consensus filtering problem for systemswith unknown correlations Despite its significancethe progress on this topic is slow Take the covari-ance intersection rule for example how to designconsensus filter which involves information matricesinformation vectors and optimal weights simultane-ouslywithout comprising its performance it would beanother interesting topic
(4) Hybrid Consensus The increasing complexity of sys-tem dynamics and high demands for filter perfor-mance call for the design of the consensus filterwhich should be as good as possible In this spiritthe hybrid consensus filtering scheme which bene-fits from different consensus approaches may meetthese requirements Although initial interests haveappeared in recent years see for example [94 95]it is a trend that more and more hybrid consensusfiltering schemes which blend two ormore consensusfiltering approaches will be constructed in the com-ing future
(5) Stochastic Stability Analysis of Kalman-Like ConsensusFilter In a Kalman-like filter there are two primarysources for error in the estimation initializationerror and stochastic errors due to the process andmeasurement noise [108] However most work hasignored the process and measurement noise whenanalyzing the stability of the consensus filter which is
hardly a reasonable treatmentThe stochastic stabilitylemma [109] may provide a possible solution and hasbeen used as an effective tool for analyzing the singleKalman-like filter see for example [109ndash112] but forthe distributed case its stochastic stability analysisremains to be established
(6) Beyond Consensus Even though the consensus isthe mostly used strategy for the distributed filteringproblems it may not be the best solution for certaincircumstance for example the diffusion strategy[113] is particularly suited for problems involving therecursive minimization of cost functions as opposedto consensus strategy It is therefore of significantengineering importance to find new strategy ormake a trade-off between different strategies for thedistributed filtering problems with new network-induced phenomena such as randomly occurringnonlinearities and fading measurements [114 115]
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the Royal Society of theUK theNational Natural Science Foundation of China underGrants 61329301 61374039 61304010 11301118 and 61573246the Hujiang Foundation of China under Grants C14002and D15009 the Alexander von Humboldt Foundation ofGermany and the Innovation Fund Project for GraduateStudent of Shanghai under Grant JWCXSL1401
References
[1] D L Hall and J Llinas ldquoAn introduction to multisensor datafusionrdquo Proceedings of the IEEE vol 85 no 1 pp 6ndash23 1997
[2] B Khaleghi A Khamis F O Karray and S N Razavi ldquoMulti-sensor data fusion a review of the state-of-the-artrdquo InformationFusion vol 14 no 1 pp 28ndash44 2013
[3] S-L Sun and Z-L Deng ldquoMulti-sensor optimal informationfusion Kalman filterrdquo Automatica vol 40 no 6 pp 1017ndash10232004
[4] R E Kalman ldquoA new approach to linear filtering and predictionproblemsrdquo Journal of Basic Engineering vol 82 no 1 pp 35ndash451960
[5] S J Julier and J K Uhlmann ldquoNon-divergent estimation algo-rithm in the presence of unknown correlationsrdquo in Proceedingsof the 16th American Control Conference vol 4 pp 2369ndash2373June 1997
[6] J K Uhlmann ldquoGeneral data fusion for estimates withunknown cross covariancesrdquo in Signal Processing Sensor Fusionand Target Recognition V vol 2755 of Proceedings of SPIE June1996
[7] Y Wang and X R Li ldquoDistributed estimation fusion withunavailable cross-correlationrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 48 no 1 pp 259ndash278 2012
Discrete Dynamics in Nature and Society 9
[8] A T Kamal J A Farrell and A K Roy-Chowdhury ldquoInfor-mation weighted consensus filters and their application indistributed camera networksrdquo IEEE Transactions on AutomaticControl vol 58 no 12 pp 3112ndash3125 2013
[9] V Ugrinovskii ldquoConditions for detectability in distributedconsensus-based observer networksrdquo IEEE Transactions onAutomatic Control vol 58 no 10 pp 2659ndash2664 2013
[10] G Battistelli L Chisci C Fantacci A Farina and A GrazianoldquoConsensus CPHD filter for distributed multitarget trackingrdquoIEEE Journal on Selected Topics in Signal Processing vol 7 no 3pp 508ndash520 2013
[11] B Shen Z Wang and Y S Hung ldquoDistributed 119867infin-consensus
filtering in sensor networks with multiple missing measure-ments the finite-horizon caserdquo Automatica vol 46 no 10 pp1682ndash1688 2010
[12] I Matei and J S Baras ldquoConsensus-based linear distributedfilteringrdquo Automatica vol 48 no 8 pp 1776ndash1782 2012
[13] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[14] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedings ofthe IEEE vol 95 no 1 pp 215ndash233 2007
[15] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[16] C Fantacci B-N Vo B-T Vo G Battistelli and L ChiscildquoConsensus labeled random finite set filtering for distributedmulti-objecttrackingrdquo httparxivorgabs150101579
[17] D P Spanos R Olfati-Saber and R M Murray ldquoApproximatedistributed kalman filtering in sensor networks with quan-tifiable performancerdquo in Proceedings of the 4th InternationalSymposium on Information Processing in Sensor Networks (IPSNrsquo05) pp 133ndash139 Pasadena Calif USA April 2005
[18] L Xiao S Boyd and S Lall ldquoA Scheme for robust distributedsensor fusion based on average consensusrdquo in Proceedings ofthe 4th International Symposium on Information Processing inSensor Networks (IPSN rsquo05) pp 63ndash70 April 2005
[19] R Olfati-Saber and J S Shamma ldquoConsensus filters for sensornetworks and distributed sensor fusionrdquo in Proceedings of the44th IEEE Conference on Decision and Control and EuropeanControl Conference (CDC-ECC rsquo05) pp 6698ndash6703 IEEEDecember 2005
[20] R Olfati-Saber ldquoDistributed Kalman filter with embeddedconsensus filtersrdquo in Proceedings of the 44th IEEE Conference onDecision and Control and European Control Conference (CDC-ECC rsquo05) pp 8179ndash8184 IEEE December 2005
[21] K J Astrom and P R Kumar ldquoControl a perspectiverdquo Auto-matica vol 50 no 1 pp 3ndash43 2014
[22] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control pp 5492ndash5498 IEEE New Orleans La USADecember 2007
[23] R Olfati-Saber ldquoKalman-consensus filter optimality stabilityand performancerdquo inProceedings of the 48th IEEEConference onDecision and Control 2009 Held Jointly with 2009 28th ChineseControl Conference pp 7036ndash7042 Shanghai ChinaDecember2009
[24] G Battistelli and L Chisci ldquoKullbackndashLeibler average consen-sus on probability densities and distributed state estimation
with guaranteed stabilityrdquo Automatica vol 50 no 3 pp 707ndash718 2014
[25] G Battistelli L Chisci M Stefano and P Francesco ldquoAninformation-theoretic approach to distributed state estimationrdquoin Proceedings of the 18th IFACWorld Congress pp 12477ndash12482Milan Italy August 2011
[26] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
[27] W Yang G Chen X Wang and L Shi ldquoStochastic sensor acti-vation for distributed state estimation over a sensor networkrdquoAutomatica vol 50 no 8 pp 2070ndash2076 2014
[28] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based linear and nonlinear filteringrdquo IEEE Trans-actions on Automatic Control vol 60 no 5 pp 1410ndash1415 2015
[29] N Friedman Seapower as Strategy Navies and National Inter-ests Naval Institute Press 2001
[30] R Singer and A Kanyuck ldquoComputer control of multiple sitetrack correlationrdquo Automatica vol 7 no 4 pp 455ndash463 1971
[31] A S Willsky M G Bello D A Castanon B C Levy andG C Verghese ldquoCombining and updating of local estimatesand regional maps along sets of one-dimensional tracksrdquo IEEETransactions on Automatic Control vol 27 no 4 pp 799ndash8131982
[32] N A Carlson ldquoFederated square root filter for decentralizedparallel processorsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 26 no 3 pp 517ndash525 1990
[33] S Roy and R A Iltis ldquoDecentralized linear estimation incorrelatedmeasurement noiserdquo IEEE Transactions on Aerospaceand Electronic Systems vol 27 no 6 pp 939ndash941 1991
[34] Y Bar-Shalom and L Campo ldquoThe effect of the commonprocess noise on the two-sensor fused-track covariancerdquo IEEETransactions on Aerospace and Electronic Systems vol AES-22no 6 pp 803ndash805 1986
[35] K H Kim ldquoDevelopment of track to track fusion algorithmsrdquoin Proceedings of the 13th American Control Conference vol 1pp 1037ndash1041 Baltimore Md USA June 1994
[36] X R Li Y Zhu JWang andCHan ldquoOptimal linear estimationfusionmdashpart I unified fusion rulesrdquo IEEE Transactions onInformation Theory vol 49 no 9 pp 2192ndash2323 2003
[37] Z-L Deng Y Gao LMao Y Li and G Hao ldquoNew approach toinformation fusion steady-state Kalman filteringrdquo Automaticavol 41 no 10 pp 1695ndash1707 2005
[38] D-J Lee ldquoNonlinear estimation and multiple sensor fusionusing unscented information filteringrdquo IEEE Signal ProcessingLetters vol 15 pp 861ndash864 2008
[39] E Song J Xu and Y Zhu ldquoOptimal distributed Kalmanfiltering fusion with singular covariances of filtering errors andmeasurement noisesrdquo IEEE Transactions on Automatic Controlvol 59 no 5 pp 1271ndash1282 2014
[40] W-A Zhang G Feng and L Yu ldquoMulti-rate distributed fusionestimation for sensor networks with packet lossesrdquoAutomaticavol 48 no 9 pp 2016ndash2028 2012
[41] W-A Zhang S Liu and L Yu ldquoFusion estimation for sensornetworks with nonuniform estimation ratesrdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 61 no 5 pp 1485ndash1498 2014
[42] T D Garvey J D Lowrance and M A Fischler ldquoAn inferencetechnique for integrating knowledge from disparate sourcesrdquoin Proceedings of the International Joint Conference on ArtificialIntelligence pp 319ndash325 Vancouver Canada August 1981
10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Discrete Dynamics in Nature and Society
unidentified may occur during the movingprocess of vehicle which equipped a suite ofnavigation sensors [5]
(ii) Approximation implementation it is oftenassumed that the prior estimation error and thenewmeasurement error are uncorrelated whichmay introduce certain degree of unknowncorrelations in the final implementation [47]
(2) Correlations that are too difficult to describe
(i) Involving too many variables in the applicationslike map building and weather forecasting theprocessmodel could involve thousands of stateswhich means maintaining a full covariancematrix is impractical [5]
(ii) Data incest [24] or double counting problem[48] due to the presence of network loops theinformation is often inadvertently used severaltimes in a distributed fusion setting
(iii) Difficulty of calculation for example how toacquire reliable correlations in the nonlinearestimates is still an open question
To summarize it is widely believed that the unknowncorrelations ubiquitously exist in a diverse range of multi-sensor fusion problems Neglecting the effect of unknowncorrelations can result in grave consequence of performancedeterioration even divergence As such it has attracted andsustained attention from researchers for decades Howeverowing to the intricate unknown nature it is not easy tocome up with a satisfied scheme to address the fusionproblems with unknown correlations If we ignore the cor-relations directly which is the Naive fusion [49] it maylead to divergence of the filter To compensate this kindof divergence a normal suboptimal approach is to increasethe system noise artificially However this heuristic requiressubstantial certain expertise and compromises the integrityof the Kalman filter framework [50]
Among existing fusion solutions for systems withunknown correlations it was the covariance intersectionalgorithm [5] which was invented by Julier and Uhlmannin 1997 that provides an effective tool to tackle unknowncorrelations According to [51] the covariance intersectionfusion rule has the advantages lying in the following (i) Theidentification and computation of the cross covariances arecompletely avoided (ii) It yields a consistent fused estimateand thus a nondivergent filter is obtained (iii) The accuracyof the fused estimate outperforms each local one (iv) Itgives a common upper bound of actual estimation errorvariances which has robustness with respect to unknowncorrelations Since then it has attracted much interest from awider community see for example [7 49ndash64] Some of themfocused on improving the covariance intersection method-ology For instance a generalized covariance intersectionknown as split covariance intersection has been created in[52] for the purpose of incorporating known independentinformation Reference [53] has improved the main results
in [5] by investigating the linear combination gains in an 1198992-
dimensional space Meanwhile an information-theoreticaljustification of covariance intersection rule and its general-ization can be found in [54] and [55] respectively Later theChernoff fusion rule which includes covariance intersectionas a special case is also reviewed in [49] Recently [56 57]have separately proposed the largest ellipsoidal algorithmand ellipsoidal intersection state fusion method which leadto a higher accuracy for the fused estimate Moreover anaccuracy comparison between covariance intersection andthree different optimal fusion rules has been presented in[58] while the others turned to apply covariance intersectionalgorithm to a plethora of areas such as target tracking [7]fault-tolerant estimate [59] simultaneous localization andmapping [60] image fusion [61] vehicle localization [62] andNASAMars rover [63]
One of the significant drawbacks of covariance intersec-tion algorithm and its variants is the computation burdenWhen the number of information sources to be fused ismore than 2 this problem is exactly a nonlinear optimizationproblem with constraints in Euclidean space R119899 and itrapidly becomes computationally intractable especially inlarge distributed sensor networks Therefore there is a greatneed to develop fast covariance intersection algorithm tocircumvent this issue Fortunately there are several solutionsthat have been reported in this spirit One of them is thesequential covariance intersection [51] where the multidi-mension nonlinear optimization problem was reduced tothe optimization of several one-dimensional nonlinear costfunctions by batch processing procedureThe secondmethodis the suboptimal noniterative algorithm [50] the methodhas been further used in [64] for designing a diffusionKalman filtering scheme and [7] for an information-theoreticinterpretation The third one is the ellipsoidal intersection[57] where the obtained algebraic fusion formulas made itcomputationally feasible Different from the above methodstrying to approximate the optimal value the fourth solutioncan give an exact solution of the optimal weights in caseof low-dimensional covariance matrices by the close-formoptimization of covariance intersection [65] which reducedthe nonlinear optimization problem into the polynomialroot-finding problem
3 Consensus Filtering Approaches
This section gives a systematic overview of recent advanceson several consensus approaches which are suitable to designconsensus-based filters In general most of the publicationson consensus filtering approaches can be classified intofour groups consensus on estimates (CE) consensus onmeasurements (CM) consensus on information (CI) and119867
infinconsensus the mechanisms of these four types of con-
sensus filtering approaches for the typical linear time-varyingsystems with multiple sensor observations are depicted inTable 2 In the following we will take a deep investigation ofthese consensus filtering approaches one by one in order toinspire more research interest
Discrete Dynamics in Nature and Society 5
Table 2 The mechanisms of four consensus filtering approaches
Types Structures of consensus filterslowast References
CE119909119894
119896= 119909
119894
119896|119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896|119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896|119896minus1)
[22 23]
CMΩ
119894
119896|119896= Ω
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896
119902119894
119896|119896= 119902
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896
[20 22]
CIΩ
119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[Ω
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896]
119902119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[119902
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896]
[24 25]
119867infin
consensus
119909119894
119896= 119860
119896119909119894
119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896minus1)
1
119899sum
119894isinN
1003817100381710038171003817100381711989410038171003817100381710038171003817
2
le 1205742
V22+
1
119899sum
119894isinN
(119890119894
0)119879
119878119894
119890119894
0
lowastlowast
[11 26]
lowastThroughout the table 119860119896is the systems matrix For each node 119894 119867119894
119896 119877119894
119896 and 119911
119894
119896are respectively measurement matrix covariance matrix of measurement
noise and measurement output 119870119894
119896and 119862
119894
119896are the filter and consensus gains to be determined and 120587
119894119895
119871119896is the consensus weight after 119871 step consensus
Further denote Ω119896|119896
≜ (119875119896|119896)minus1 and 119902
119896|119896= (119875
119896|119896)minus1
119909119896|119896
as information matrix and information vector and (119867119894
119896)119879
(119877119894
119896)minus1
119911119894
119896and (119867119894
119896)119879
(119877119894
119896)minus1
119867119894
119896as innovation
pair lowastlowastWhere 119894 and 1198901198940are the filtering error and initial error for node 119894 respectively 120574 is the disturbance attenuation level and V represents noise while 119878119894 is
the given positive definite matrix
31 Consensus on Estimates Theconsensus approach belong-ing to the first group is the consensus on estimates (CE)in which only state estimates are averaged out to reachconsensus It is the most basic consensus filtering approachin the early stage of CE (
119894(119905) = sum
119895isin119873119894
119886119894119895(119909
119895(119905) minus 119909
119894(119905)) +
sum119895isin119869119894
119886119894119895(119906
119895(119905) minus 119909
119894(119905)) where 119909
119894(119905) and 119906
119894(119905) are the current
state and measurement of node 119894 resp 119873119894denotes the set
of neighbors of node 119894 while 119869119894denotes the set of inclusive
neighbors of node 119894 and 119886119894119895is the (119894 119895) entry of the adjacency
matrix of the associated communication graph) [19] eachsensor node was treated as an agent and with this respectthe full-fledged consensus theory in multiagent systems canbe directly applied to the distributed filters plus one extraconsensus term to reflect the measurement features Thisconsensus algorithmwas furthermodified to theKalman-likedistributed estimator that combined updated state estimateand consensus term which is also called Kalman consensusfilter [22 23] It should be noticed that the CE is not limitedto the Kalman-like filters (following the same definition as in[23] we refer to any recursive estimator that has the similarfilter structure as Kalman filter as Kalman-like filters) infact the well-known 119867
infinconsensus can also be included
in this group However due to its ever-growing importanceand influence in a variety of engineering areas we treat itas a separate consensus filtering approach for the purpose ofbetter discussing these issues
From the algorithm perspective it does not necessarilyrequire the information of local error covariance matrix orlocal probability density functions It is no wonder that CEand its variants have been employed to design an extensivebody of consensus filters see for example [12 23 66ndash72]
For instance by using the consensus strategy [66] hasconstructed a local estimate based on its own measurementsand on the estimates from its neighbors and [67] hasintroduced a consensus-based filter that can provide reliableestimate despite of the existence of missing observations andcommunication faults In [68] with the help of the theoryof synchronization and consensus in complex networks andsystems a novel CE consensus has been born with thepinning observers Further a CE term has been embeddedin the penalty function [69 Equation (10)] to increase theaccuracy of the local estimates which is fundamental toguarantee convergence of the state estimates to the state ofthe observed system More specifically [12] has devised aconsensus filter in two steps In the first step an updatewas produced using a Luenberger-type observer In thesecond step called consensus step every sensor computeda convex combination between its local update and theupdates received from its neighbors Meanwhile in [70] twodifferent distributed consensus filters have been integrated inthe proposed distributed sensor fusion algorithm to achievecooperative sensing among sensor nodes Recently based onthe CE [71] has designed two types of consensus filters fortarget tracking problem over heterogeneous sensor networksand their unbiasedness and optimality were discussed as wellLastly [72] has presented a decentralized observer with aconsensus filter that blended with its neighborhood so thatthe state estimate of each agent can reach consensus after 119903
times of iterations at each time interval
32 Consensus on Measurements The CE does not involvethe error covariance matrices which may lead to certaindegree of conservatism in designing consensus filter within
6 Discrete Dynamics in Nature and Society
the Kalman-like filter framework It is well known that theerror covariance matrices may contain valuable informationwhich has been successfully used to improve the filterperformance Taking this into account another consensusapproach that is consensus on measurements (CM) isproposed for fulfilling this requirement It performs a con-sensus on local measurements or more specifically localinnovation pairs so as to approximate in a distributed waythe correction step of the centralized Kalman filter It isworth noticing that the stability of CM consensus filteringcan be ensured only when a sufficiently large number ofconsensus steps are carried out during each sampling intervalso that the local information provided by the innovationpairs has time to spread throughout the whole networkBesides this kind of approach relies on the assumption thatthe measurement errors coming from different sensors aremutually independent and this approach is limited to theKalman-like filters
During the last decade the CM has been broadly used inboth the signal processing and control communities see forexample [20 22 73ndash77]The idea of CMconsensus originallyappeared in [20] to solve the data fusion problems in adistributed way by using low-pass and band-pass consensusfilters A modified version of this consensus approach waspresented in [22Algorithm 1] where two identical consensusfilters were employed and it is applicable to sensor networkwith different observation matrices Further [73] showedthat CM can guarantee that the local estimates of the errorcovariance matrix and local estimates of the state convergeto their centralized ones Later this consensus approach wasapplied to design consensus filter for jump Markov systems[74] and discrete-time nonlinear systems with non-Gaussiannoise [75] In a following paper [76] a pseudo-measurementmatrix was reconstructed by embedding a statistical linearerror propagation approach [78] which facilitates the use ofCM in the unscented Kalman filtering fashion Recently CMwas interpreted as likelihood consensus and applied to thedistributed particle filtering setting [77]
33 Consensus on Information Due to the facts that onlyone or few consensus iterations per time can be affordedin order to reduce the communication overhead for higherenergy efficiency in particular wireless sensor network envi-ronment and there could not be enough time to wait forCM to convergence [79] consequently an alternative con-sensus approach namely consensus on information (CI)was recently invented to circumvent these issues From analgorithm standpoint CI is nothing but forming a localaverage on information matrices and information vectorsThe approach can guarantee stability for any number ofconsensus steps (even for single one) but its mean-squaredestimation error performance may be hampered since thefusion rule adopts a conservative point of view by assumingthat the correlations between local estimates are completelyunknown [28] It was originally introduced in [25] for adistributed state estimation problem later a mathematicalrigorous treatment of it was detailed in [24] where CIis interpreted as a consensus on probability density func-tions in the Kullback-Leibler average sense Following the
same consensus paradigm [10] presented a novel consensuscardinalized probability hypothesis density filter to studythe distributed multitarget tracking problem over a sensornetwork and [80] designed a consensus-based multiple-model Bayesian filter for the distributed tracking task of amaneuvering target More recently [81] applied CI to designthe distributed unscented Kalman filters for systems withstate saturations and sensor saturations
34 119867infin
Consensus It should be pointed out that the afore-mentioned consensus filtering algorithms are mainly basedon the traditional Kalman filtering theory which requiresthe statistic information about plant model to be knownperfectly unfortunately the practical systems are oftenaccompanied with parameter uncertainties and exogenousdisturbances Consequently there is a great impetus todevelop consensus filtering scheme as robust as possibleWith these needs considered the 119867
infinconsensus has been
recently introduced and has been widely recognized see forexample [11 26 82ndash88]
The term 119867infin
consensus was officially coined by [11]the main intuition behind it arises from the notion of 119867
infin
disagreement between adjacent nodes to quantify consensusperformance of the filter network [85] In [11] the 119867
infin
consensus performance requirement has been defined toquantify bounded consensus regarding the filtering errors(agreements) over a finite horizon the paper has con-sidered a distributed 119867
infinconsensus filtering problem for
sensor networks with multiple missing measurements In thesimilar vein [26] has studied the distributed 119867
infinfiltering
with randomly occurring saturation and successive packetdropout Furthermore the119867
infinconsensus approach has been
utilized for solving control problems of multiagent systemsfor example in a novel fuzzy model setting [83] and systemwith missing measurements [82] Most recently [84] has putforward distributed event-triggered 119867
infinconsensus filtering
problems in mobile sensor networks where the transmissionof each sensor was triggered by an event At about thesame time as [11] Ugrinovskii followed a different path toinvestigate the 119867
infinconsensus by using vector dissipativity
methodology see for example [85ndash88] For instance bypursuing 119867
infinconsensus on estimates the distributed robust
filtering problems have been discussed for uncertain systemswith measurement uncertainty [85] a nonvanishing nonlin-ear disturbance with unbounded energy [86] and switchingtopologies [87] lately [88] has laid out 119867
infinconsensus-
based synchronization protocol scheduled for each agent tosynchronize with a reference parameter-varying system
4 Latest Progress
Very recently the research on multisensor fusion and con-sensus filtering is receiving an increasing attention manyinspiring results have been published Here we highlightsome of the newest work with respect to this topic
(1) Fusion with Incomplete Information Due to limitedcapacity of signal transmission through networkedsystems the incomplete information [89] (such as
Discrete Dynamics in Nature and Society 7
missing measurement packet dropout quantiza-tion saturation and networked-induced delay) isinevitable in most of real implementations Thesephenomena may potentially deteriorate the systemperformance accordingly the multisensor fusion forsystems with incomplete information becomes pop-ular For example [90] has developed fusion strate-gies for communication between the sensors andthe estimation center was subject to random packetloss When sensors experience randomly delayedmeasurements and sensor failures [91] has deviseda robust information fusion estimator Lastly [92]has designed an optimal distributed fusion Kalmanfilter with the consideration of missing sensor mea-surements random transmission delays and packetdropouts Very recently [93] was concerned with thedistributed Kalman filtering problem for a class ofnetworked multisensor fusion systems with commu-nication bandwidth constraints
(2) Hybrid CMCI In [28] a new class of consensusfilters (named Hybrid CMCI) which enjoy the com-plementary benefits from two existing consensusfiltering approaches that is CM and CI have beenintroduced for distributed state estimation over sen-sor networks The results have claimed that underminimal requirements (ie collective observabilityand network connectivity) the guaranteed stabilityof the Hybrid CMCI filter can be achieved The ideafirst appeared in [94] more recently a mathematicalrigorous analysis of the Hybrid CMCI consensus forextended Kalman filtering setting has been given in[95]
(3) Set-Theoretic Consensus In [96] under the assump-tion of unknown but bounded measurement errorsa set-theoreticset-membership consensus has beenformulated in a set-theoretic framework Further thepaper has analyzed the consensus algorithms in thecase of undirected and stationary communicationgraphs The result has shown that for both types ofprotocols asymptotic consensus cannot be guaran-teed with respect to all possible noise realizations butthe disagreement among the agent states is asymptot-ically bounded
(4) WeightedAverageConsensus-BasedUnscentedKalmanFiltering Reference [97] has investigated the consen-sus-based distributed state estimation problems fora class of sensor networks within the unscentedKalman filter framework Without approximatinga pseudo-measurement matrix a weighted averageconsensus-based unscented Kalman filtering algo-rithm has been developed which directly imple-mented consensus on state vectors and error covari-ance matrices and its estimation error was proven tobe bounded in mean square
(5) Distributed 119867infin
Consensus Filtering for PiecewiseDiscrete-Time Linear Systems Reference [98] has
studied the distributed 119867infin
consensus filtering prob-lem for a class of piecewise discrete-time linearsystems First the modes and their transitions of aug-mented piecewise linear systems as well as distributedfilters have been formulated Next the structure ofaugmented distributed filter gains has been presentedin virtue of the adjacent matrix of sensor networksBesides a set of sufficient conditions have beenprovided for the distributed filter to ensure that itsdynamics were global asymptotically stable with the119867
infinconsensus performance constraint
(6) Distributed Kalman Consensus Filter with Intermit-tent Observations Reference [99] has considered thedistributed state estimation problem for linear time-varying systems with intermittent observations Inthe paper an optimal Kalman consensus filter hasbeen developed by minimizing the mean-squaredestimation error for each node To derive a scalablealgorithm for the covariance matrices update a sub-optimal filter has also been proposed by omitting theedge covariance matrices among nodes Besides asufficient condition was presented for ensuring thestochastic stability of the suboptimal filter by usingthe Lyapunov-based approach
(7) Information Weighted Consensus As noted in [8]the consensus estimate is suboptimal when the crosscovariances between the individual state estimatesacross different nodes are not incorporated in thedistributed filtering framework The cross covarianceis usually neglected because of the limitations ofthe computational and bandwidth requirements Assuch a consensus filtering scheme should guaranteeconvergence to the optimal centralized estimate aswell as maintaining low computation and commu-nication resource requirements Motivated by theabove discussions [8] has proposed the informationweighted consensus algorithm which can secure theoptimal estimate by proper weighting of the priorstate and measurement information
5 Conclusion and Future Directions
In this paper we have introduced both classic results andrecent advances developed inmultisensor fusion and consen-sus filtering First we recalled some important results in thedevelopment of multisensor fusion technology in particularmultisensor fusionwith unknown correlations Next we gavea systematic review of several consensus filtering approacheswhich are widely used to design consensus filter Furthersome latest progress on multisensor fusion and consensusfiltering was also presented To conclude this survey paperbased on the literature reviewed we will offer readers aglimpse of several future directions that may spark theirinterest
(1) Further Divide the Unknown Correlations Althoughthe reasons causing unknown correlations are abun-dant in many real situations we can obtain the par-tial information about unknowns such as uncertain
8 Discrete Dynamics in Nature and Society
system matrix [100 101] uncertain-covariance noise[102] nonfragile filter [103] and uncertain stochasticnonlinearity [100 104] which can be tackled byrobust filtering [100] extendedKalman filtering [105]recursive filtering [106] and 119867
infinrobust filtering
[107] Therefore according to the unknown nature ofunknown correlations it is necessary to further dividethem into two groups partial unknown correlationsand complete unknown correlations Based on thatit is possible to develop new fusion mechanisms orimprove the existing ones to get a better solution forfusion with unknown correlations
(2) Mathematical Characterization of Unknown Correla-tions Due to the intricate unknown nature most ofpublications involving unknown correlations are justlabeling the error cross covariance 119875
119894119895as unknown
without giving their structures which unfortunatelydid not capture the information of correlations andtheir fusion results are inevitably leading to certaindegree of conservatism Reference [57] has made afew attempts to provide an explicit characterizationfor unknown correlation however the derivation iscomplex and not intuitive Hence it is still an openquestion to get a general yet concise mathematicalmodel to describe the unknown correlations
(3) Consensus Filtering with Unknown Correlations Theunknown correlations are ubiquitously existing ingeneral distributed filtering problems they are alsothe major source for the ldquodata insectrdquo phenomenonin the network It is therefore of great importanceto study the consensus filtering problem for systemswith unknown correlations Despite its significancethe progress on this topic is slow Take the covari-ance intersection rule for example how to designconsensus filter which involves information matricesinformation vectors and optimal weights simultane-ouslywithout comprising its performance it would beanother interesting topic
(4) Hybrid Consensus The increasing complexity of sys-tem dynamics and high demands for filter perfor-mance call for the design of the consensus filterwhich should be as good as possible In this spiritthe hybrid consensus filtering scheme which bene-fits from different consensus approaches may meetthese requirements Although initial interests haveappeared in recent years see for example [94 95]it is a trend that more and more hybrid consensusfiltering schemes which blend two ormore consensusfiltering approaches will be constructed in the com-ing future
(5) Stochastic Stability Analysis of Kalman-Like ConsensusFilter In a Kalman-like filter there are two primarysources for error in the estimation initializationerror and stochastic errors due to the process andmeasurement noise [108] However most work hasignored the process and measurement noise whenanalyzing the stability of the consensus filter which is
hardly a reasonable treatmentThe stochastic stabilitylemma [109] may provide a possible solution and hasbeen used as an effective tool for analyzing the singleKalman-like filter see for example [109ndash112] but forthe distributed case its stochastic stability analysisremains to be established
(6) Beyond Consensus Even though the consensus isthe mostly used strategy for the distributed filteringproblems it may not be the best solution for certaincircumstance for example the diffusion strategy[113] is particularly suited for problems involving therecursive minimization of cost functions as opposedto consensus strategy It is therefore of significantengineering importance to find new strategy ormake a trade-off between different strategies for thedistributed filtering problems with new network-induced phenomena such as randomly occurringnonlinearities and fading measurements [114 115]
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the Royal Society of theUK theNational Natural Science Foundation of China underGrants 61329301 61374039 61304010 11301118 and 61573246the Hujiang Foundation of China under Grants C14002and D15009 the Alexander von Humboldt Foundation ofGermany and the Innovation Fund Project for GraduateStudent of Shanghai under Grant JWCXSL1401
References
[1] D L Hall and J Llinas ldquoAn introduction to multisensor datafusionrdquo Proceedings of the IEEE vol 85 no 1 pp 6ndash23 1997
[2] B Khaleghi A Khamis F O Karray and S N Razavi ldquoMulti-sensor data fusion a review of the state-of-the-artrdquo InformationFusion vol 14 no 1 pp 28ndash44 2013
[3] S-L Sun and Z-L Deng ldquoMulti-sensor optimal informationfusion Kalman filterrdquo Automatica vol 40 no 6 pp 1017ndash10232004
[4] R E Kalman ldquoA new approach to linear filtering and predictionproblemsrdquo Journal of Basic Engineering vol 82 no 1 pp 35ndash451960
[5] S J Julier and J K Uhlmann ldquoNon-divergent estimation algo-rithm in the presence of unknown correlationsrdquo in Proceedingsof the 16th American Control Conference vol 4 pp 2369ndash2373June 1997
[6] J K Uhlmann ldquoGeneral data fusion for estimates withunknown cross covariancesrdquo in Signal Processing Sensor Fusionand Target Recognition V vol 2755 of Proceedings of SPIE June1996
[7] Y Wang and X R Li ldquoDistributed estimation fusion withunavailable cross-correlationrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 48 no 1 pp 259ndash278 2012
Discrete Dynamics in Nature and Society 9
[8] A T Kamal J A Farrell and A K Roy-Chowdhury ldquoInfor-mation weighted consensus filters and their application indistributed camera networksrdquo IEEE Transactions on AutomaticControl vol 58 no 12 pp 3112ndash3125 2013
[9] V Ugrinovskii ldquoConditions for detectability in distributedconsensus-based observer networksrdquo IEEE Transactions onAutomatic Control vol 58 no 10 pp 2659ndash2664 2013
[10] G Battistelli L Chisci C Fantacci A Farina and A GrazianoldquoConsensus CPHD filter for distributed multitarget trackingrdquoIEEE Journal on Selected Topics in Signal Processing vol 7 no 3pp 508ndash520 2013
[11] B Shen Z Wang and Y S Hung ldquoDistributed 119867infin-consensus
filtering in sensor networks with multiple missing measure-ments the finite-horizon caserdquo Automatica vol 46 no 10 pp1682ndash1688 2010
[12] I Matei and J S Baras ldquoConsensus-based linear distributedfilteringrdquo Automatica vol 48 no 8 pp 1776ndash1782 2012
[13] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[14] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedings ofthe IEEE vol 95 no 1 pp 215ndash233 2007
[15] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[16] C Fantacci B-N Vo B-T Vo G Battistelli and L ChiscildquoConsensus labeled random finite set filtering for distributedmulti-objecttrackingrdquo httparxivorgabs150101579
[17] D P Spanos R Olfati-Saber and R M Murray ldquoApproximatedistributed kalman filtering in sensor networks with quan-tifiable performancerdquo in Proceedings of the 4th InternationalSymposium on Information Processing in Sensor Networks (IPSNrsquo05) pp 133ndash139 Pasadena Calif USA April 2005
[18] L Xiao S Boyd and S Lall ldquoA Scheme for robust distributedsensor fusion based on average consensusrdquo in Proceedings ofthe 4th International Symposium on Information Processing inSensor Networks (IPSN rsquo05) pp 63ndash70 April 2005
[19] R Olfati-Saber and J S Shamma ldquoConsensus filters for sensornetworks and distributed sensor fusionrdquo in Proceedings of the44th IEEE Conference on Decision and Control and EuropeanControl Conference (CDC-ECC rsquo05) pp 6698ndash6703 IEEEDecember 2005
[20] R Olfati-Saber ldquoDistributed Kalman filter with embeddedconsensus filtersrdquo in Proceedings of the 44th IEEE Conference onDecision and Control and European Control Conference (CDC-ECC rsquo05) pp 8179ndash8184 IEEE December 2005
[21] K J Astrom and P R Kumar ldquoControl a perspectiverdquo Auto-matica vol 50 no 1 pp 3ndash43 2014
[22] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control pp 5492ndash5498 IEEE New Orleans La USADecember 2007
[23] R Olfati-Saber ldquoKalman-consensus filter optimality stabilityand performancerdquo inProceedings of the 48th IEEEConference onDecision and Control 2009 Held Jointly with 2009 28th ChineseControl Conference pp 7036ndash7042 Shanghai ChinaDecember2009
[24] G Battistelli and L Chisci ldquoKullbackndashLeibler average consen-sus on probability densities and distributed state estimation
with guaranteed stabilityrdquo Automatica vol 50 no 3 pp 707ndash718 2014
[25] G Battistelli L Chisci M Stefano and P Francesco ldquoAninformation-theoretic approach to distributed state estimationrdquoin Proceedings of the 18th IFACWorld Congress pp 12477ndash12482Milan Italy August 2011
[26] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
[27] W Yang G Chen X Wang and L Shi ldquoStochastic sensor acti-vation for distributed state estimation over a sensor networkrdquoAutomatica vol 50 no 8 pp 2070ndash2076 2014
[28] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based linear and nonlinear filteringrdquo IEEE Trans-actions on Automatic Control vol 60 no 5 pp 1410ndash1415 2015
[29] N Friedman Seapower as Strategy Navies and National Inter-ests Naval Institute Press 2001
[30] R Singer and A Kanyuck ldquoComputer control of multiple sitetrack correlationrdquo Automatica vol 7 no 4 pp 455ndash463 1971
[31] A S Willsky M G Bello D A Castanon B C Levy andG C Verghese ldquoCombining and updating of local estimatesand regional maps along sets of one-dimensional tracksrdquo IEEETransactions on Automatic Control vol 27 no 4 pp 799ndash8131982
[32] N A Carlson ldquoFederated square root filter for decentralizedparallel processorsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 26 no 3 pp 517ndash525 1990
[33] S Roy and R A Iltis ldquoDecentralized linear estimation incorrelatedmeasurement noiserdquo IEEE Transactions on Aerospaceand Electronic Systems vol 27 no 6 pp 939ndash941 1991
[34] Y Bar-Shalom and L Campo ldquoThe effect of the commonprocess noise on the two-sensor fused-track covariancerdquo IEEETransactions on Aerospace and Electronic Systems vol AES-22no 6 pp 803ndash805 1986
[35] K H Kim ldquoDevelopment of track to track fusion algorithmsrdquoin Proceedings of the 13th American Control Conference vol 1pp 1037ndash1041 Baltimore Md USA June 1994
[36] X R Li Y Zhu JWang andCHan ldquoOptimal linear estimationfusionmdashpart I unified fusion rulesrdquo IEEE Transactions onInformation Theory vol 49 no 9 pp 2192ndash2323 2003
[37] Z-L Deng Y Gao LMao Y Li and G Hao ldquoNew approach toinformation fusion steady-state Kalman filteringrdquo Automaticavol 41 no 10 pp 1695ndash1707 2005
[38] D-J Lee ldquoNonlinear estimation and multiple sensor fusionusing unscented information filteringrdquo IEEE Signal ProcessingLetters vol 15 pp 861ndash864 2008
[39] E Song J Xu and Y Zhu ldquoOptimal distributed Kalmanfiltering fusion with singular covariances of filtering errors andmeasurement noisesrdquo IEEE Transactions on Automatic Controlvol 59 no 5 pp 1271ndash1282 2014
[40] W-A Zhang G Feng and L Yu ldquoMulti-rate distributed fusionestimation for sensor networks with packet lossesrdquoAutomaticavol 48 no 9 pp 2016ndash2028 2012
[41] W-A Zhang S Liu and L Yu ldquoFusion estimation for sensornetworks with nonuniform estimation ratesrdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 61 no 5 pp 1485ndash1498 2014
[42] T D Garvey J D Lowrance and M A Fischler ldquoAn inferencetechnique for integrating knowledge from disparate sourcesrdquoin Proceedings of the International Joint Conference on ArtificialIntelligence pp 319ndash325 Vancouver Canada August 1981
10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 5
Table 2 The mechanisms of four consensus filtering approaches
Types Structures of consensus filterslowast References
CE119909119894
119896= 119909
119894
119896|119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896|119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896|119896minus1)
[22 23]
CMΩ
119894
119896|119896= Ω
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896
119902119894
119896|119896= 119902
119894
119896|119896minus1+ |N| sum
119895isinN
120587119894119895
119871119896(119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896
[20 22]
CIΩ
119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[Ω
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119867119895
119896]
119902119894
119896|119896= sum
119895isinN
120587119894119895
119871119896[119902
119895
119896|119896minus1+ (119867
119895
119896)119879
(119877119895
119896)minus1
119911119895
119896]
[24 25]
119867infin
consensus
119909119894
119896= 119860
119896119909119894
119896minus1+ 119870
119894
119896(119911
119894
119896minus 119867
119894
119896119909119894
119896minus1) + 119906
119894
119896
119906119894
119896= 119862
119894
119896sum
119895isin119873119894
(119909119895
119896minus1minus 119909
119894
119896minus1)
1
119899sum
119894isinN
1003817100381710038171003817100381711989410038171003817100381710038171003817
2
le 1205742
V22+
1
119899sum
119894isinN
(119890119894
0)119879
119878119894
119890119894
0
lowastlowast
[11 26]
lowastThroughout the table 119860119896is the systems matrix For each node 119894 119867119894
119896 119877119894
119896 and 119911
119894
119896are respectively measurement matrix covariance matrix of measurement
noise and measurement output 119870119894
119896and 119862
119894
119896are the filter and consensus gains to be determined and 120587
119894119895
119871119896is the consensus weight after 119871 step consensus
Further denote Ω119896|119896
≜ (119875119896|119896)minus1 and 119902
119896|119896= (119875
119896|119896)minus1
119909119896|119896
as information matrix and information vector and (119867119894
119896)119879
(119877119894
119896)minus1
119911119894
119896and (119867119894
119896)119879
(119877119894
119896)minus1
119867119894
119896as innovation
pair lowastlowastWhere 119894 and 1198901198940are the filtering error and initial error for node 119894 respectively 120574 is the disturbance attenuation level and V represents noise while 119878119894 is
the given positive definite matrix
31 Consensus on Estimates Theconsensus approach belong-ing to the first group is the consensus on estimates (CE)in which only state estimates are averaged out to reachconsensus It is the most basic consensus filtering approachin the early stage of CE (
119894(119905) = sum
119895isin119873119894
119886119894119895(119909
119895(119905) minus 119909
119894(119905)) +
sum119895isin119869119894
119886119894119895(119906
119895(119905) minus 119909
119894(119905)) where 119909
119894(119905) and 119906
119894(119905) are the current
state and measurement of node 119894 resp 119873119894denotes the set
of neighbors of node 119894 while 119869119894denotes the set of inclusive
neighbors of node 119894 and 119886119894119895is the (119894 119895) entry of the adjacency
matrix of the associated communication graph) [19] eachsensor node was treated as an agent and with this respectthe full-fledged consensus theory in multiagent systems canbe directly applied to the distributed filters plus one extraconsensus term to reflect the measurement features Thisconsensus algorithmwas furthermodified to theKalman-likedistributed estimator that combined updated state estimateand consensus term which is also called Kalman consensusfilter [22 23] It should be noticed that the CE is not limitedto the Kalman-like filters (following the same definition as in[23] we refer to any recursive estimator that has the similarfilter structure as Kalman filter as Kalman-like filters) infact the well-known 119867
infinconsensus can also be included
in this group However due to its ever-growing importanceand influence in a variety of engineering areas we treat itas a separate consensus filtering approach for the purpose ofbetter discussing these issues
From the algorithm perspective it does not necessarilyrequire the information of local error covariance matrix orlocal probability density functions It is no wonder that CEand its variants have been employed to design an extensivebody of consensus filters see for example [12 23 66ndash72]
For instance by using the consensus strategy [66] hasconstructed a local estimate based on its own measurementsand on the estimates from its neighbors and [67] hasintroduced a consensus-based filter that can provide reliableestimate despite of the existence of missing observations andcommunication faults In [68] with the help of the theoryof synchronization and consensus in complex networks andsystems a novel CE consensus has been born with thepinning observers Further a CE term has been embeddedin the penalty function [69 Equation (10)] to increase theaccuracy of the local estimates which is fundamental toguarantee convergence of the state estimates to the state ofthe observed system More specifically [12] has devised aconsensus filter in two steps In the first step an updatewas produced using a Luenberger-type observer In thesecond step called consensus step every sensor computeda convex combination between its local update and theupdates received from its neighbors Meanwhile in [70] twodifferent distributed consensus filters have been integrated inthe proposed distributed sensor fusion algorithm to achievecooperative sensing among sensor nodes Recently based onthe CE [71] has designed two types of consensus filters fortarget tracking problem over heterogeneous sensor networksand their unbiasedness and optimality were discussed as wellLastly [72] has presented a decentralized observer with aconsensus filter that blended with its neighborhood so thatthe state estimate of each agent can reach consensus after 119903
times of iterations at each time interval
32 Consensus on Measurements The CE does not involvethe error covariance matrices which may lead to certaindegree of conservatism in designing consensus filter within
6 Discrete Dynamics in Nature and Society
the Kalman-like filter framework It is well known that theerror covariance matrices may contain valuable informationwhich has been successfully used to improve the filterperformance Taking this into account another consensusapproach that is consensus on measurements (CM) isproposed for fulfilling this requirement It performs a con-sensus on local measurements or more specifically localinnovation pairs so as to approximate in a distributed waythe correction step of the centralized Kalman filter It isworth noticing that the stability of CM consensus filteringcan be ensured only when a sufficiently large number ofconsensus steps are carried out during each sampling intervalso that the local information provided by the innovationpairs has time to spread throughout the whole networkBesides this kind of approach relies on the assumption thatthe measurement errors coming from different sensors aremutually independent and this approach is limited to theKalman-like filters
During the last decade the CM has been broadly used inboth the signal processing and control communities see forexample [20 22 73ndash77]The idea of CMconsensus originallyappeared in [20] to solve the data fusion problems in adistributed way by using low-pass and band-pass consensusfilters A modified version of this consensus approach waspresented in [22Algorithm 1] where two identical consensusfilters were employed and it is applicable to sensor networkwith different observation matrices Further [73] showedthat CM can guarantee that the local estimates of the errorcovariance matrix and local estimates of the state convergeto their centralized ones Later this consensus approach wasapplied to design consensus filter for jump Markov systems[74] and discrete-time nonlinear systems with non-Gaussiannoise [75] In a following paper [76] a pseudo-measurementmatrix was reconstructed by embedding a statistical linearerror propagation approach [78] which facilitates the use ofCM in the unscented Kalman filtering fashion Recently CMwas interpreted as likelihood consensus and applied to thedistributed particle filtering setting [77]
33 Consensus on Information Due to the facts that onlyone or few consensus iterations per time can be affordedin order to reduce the communication overhead for higherenergy efficiency in particular wireless sensor network envi-ronment and there could not be enough time to wait forCM to convergence [79] consequently an alternative con-sensus approach namely consensus on information (CI)was recently invented to circumvent these issues From analgorithm standpoint CI is nothing but forming a localaverage on information matrices and information vectorsThe approach can guarantee stability for any number ofconsensus steps (even for single one) but its mean-squaredestimation error performance may be hampered since thefusion rule adopts a conservative point of view by assumingthat the correlations between local estimates are completelyunknown [28] It was originally introduced in [25] for adistributed state estimation problem later a mathematicalrigorous treatment of it was detailed in [24] where CIis interpreted as a consensus on probability density func-tions in the Kullback-Leibler average sense Following the
same consensus paradigm [10] presented a novel consensuscardinalized probability hypothesis density filter to studythe distributed multitarget tracking problem over a sensornetwork and [80] designed a consensus-based multiple-model Bayesian filter for the distributed tracking task of amaneuvering target More recently [81] applied CI to designthe distributed unscented Kalman filters for systems withstate saturations and sensor saturations
34 119867infin
Consensus It should be pointed out that the afore-mentioned consensus filtering algorithms are mainly basedon the traditional Kalman filtering theory which requiresthe statistic information about plant model to be knownperfectly unfortunately the practical systems are oftenaccompanied with parameter uncertainties and exogenousdisturbances Consequently there is a great impetus todevelop consensus filtering scheme as robust as possibleWith these needs considered the 119867
infinconsensus has been
recently introduced and has been widely recognized see forexample [11 26 82ndash88]
The term 119867infin
consensus was officially coined by [11]the main intuition behind it arises from the notion of 119867
infin
disagreement between adjacent nodes to quantify consensusperformance of the filter network [85] In [11] the 119867
infin
consensus performance requirement has been defined toquantify bounded consensus regarding the filtering errors(agreements) over a finite horizon the paper has con-sidered a distributed 119867
infinconsensus filtering problem for
sensor networks with multiple missing measurements In thesimilar vein [26] has studied the distributed 119867
infinfiltering
with randomly occurring saturation and successive packetdropout Furthermore the119867
infinconsensus approach has been
utilized for solving control problems of multiagent systemsfor example in a novel fuzzy model setting [83] and systemwith missing measurements [82] Most recently [84] has putforward distributed event-triggered 119867
infinconsensus filtering
problems in mobile sensor networks where the transmissionof each sensor was triggered by an event At about thesame time as [11] Ugrinovskii followed a different path toinvestigate the 119867
infinconsensus by using vector dissipativity
methodology see for example [85ndash88] For instance bypursuing 119867
infinconsensus on estimates the distributed robust
filtering problems have been discussed for uncertain systemswith measurement uncertainty [85] a nonvanishing nonlin-ear disturbance with unbounded energy [86] and switchingtopologies [87] lately [88] has laid out 119867
infinconsensus-
based synchronization protocol scheduled for each agent tosynchronize with a reference parameter-varying system
4 Latest Progress
Very recently the research on multisensor fusion and con-sensus filtering is receiving an increasing attention manyinspiring results have been published Here we highlightsome of the newest work with respect to this topic
(1) Fusion with Incomplete Information Due to limitedcapacity of signal transmission through networkedsystems the incomplete information [89] (such as
Discrete Dynamics in Nature and Society 7
missing measurement packet dropout quantiza-tion saturation and networked-induced delay) isinevitable in most of real implementations Thesephenomena may potentially deteriorate the systemperformance accordingly the multisensor fusion forsystems with incomplete information becomes pop-ular For example [90] has developed fusion strate-gies for communication between the sensors andthe estimation center was subject to random packetloss When sensors experience randomly delayedmeasurements and sensor failures [91] has deviseda robust information fusion estimator Lastly [92]has designed an optimal distributed fusion Kalmanfilter with the consideration of missing sensor mea-surements random transmission delays and packetdropouts Very recently [93] was concerned with thedistributed Kalman filtering problem for a class ofnetworked multisensor fusion systems with commu-nication bandwidth constraints
(2) Hybrid CMCI In [28] a new class of consensusfilters (named Hybrid CMCI) which enjoy the com-plementary benefits from two existing consensusfiltering approaches that is CM and CI have beenintroduced for distributed state estimation over sen-sor networks The results have claimed that underminimal requirements (ie collective observabilityand network connectivity) the guaranteed stabilityof the Hybrid CMCI filter can be achieved The ideafirst appeared in [94] more recently a mathematicalrigorous analysis of the Hybrid CMCI consensus forextended Kalman filtering setting has been given in[95]
(3) Set-Theoretic Consensus In [96] under the assump-tion of unknown but bounded measurement errorsa set-theoreticset-membership consensus has beenformulated in a set-theoretic framework Further thepaper has analyzed the consensus algorithms in thecase of undirected and stationary communicationgraphs The result has shown that for both types ofprotocols asymptotic consensus cannot be guaran-teed with respect to all possible noise realizations butthe disagreement among the agent states is asymptot-ically bounded
(4) WeightedAverageConsensus-BasedUnscentedKalmanFiltering Reference [97] has investigated the consen-sus-based distributed state estimation problems fora class of sensor networks within the unscentedKalman filter framework Without approximatinga pseudo-measurement matrix a weighted averageconsensus-based unscented Kalman filtering algo-rithm has been developed which directly imple-mented consensus on state vectors and error covari-ance matrices and its estimation error was proven tobe bounded in mean square
(5) Distributed 119867infin
Consensus Filtering for PiecewiseDiscrete-Time Linear Systems Reference [98] has
studied the distributed 119867infin
consensus filtering prob-lem for a class of piecewise discrete-time linearsystems First the modes and their transitions of aug-mented piecewise linear systems as well as distributedfilters have been formulated Next the structure ofaugmented distributed filter gains has been presentedin virtue of the adjacent matrix of sensor networksBesides a set of sufficient conditions have beenprovided for the distributed filter to ensure that itsdynamics were global asymptotically stable with the119867
infinconsensus performance constraint
(6) Distributed Kalman Consensus Filter with Intermit-tent Observations Reference [99] has considered thedistributed state estimation problem for linear time-varying systems with intermittent observations Inthe paper an optimal Kalman consensus filter hasbeen developed by minimizing the mean-squaredestimation error for each node To derive a scalablealgorithm for the covariance matrices update a sub-optimal filter has also been proposed by omitting theedge covariance matrices among nodes Besides asufficient condition was presented for ensuring thestochastic stability of the suboptimal filter by usingthe Lyapunov-based approach
(7) Information Weighted Consensus As noted in [8]the consensus estimate is suboptimal when the crosscovariances between the individual state estimatesacross different nodes are not incorporated in thedistributed filtering framework The cross covarianceis usually neglected because of the limitations ofthe computational and bandwidth requirements Assuch a consensus filtering scheme should guaranteeconvergence to the optimal centralized estimate aswell as maintaining low computation and commu-nication resource requirements Motivated by theabove discussions [8] has proposed the informationweighted consensus algorithm which can secure theoptimal estimate by proper weighting of the priorstate and measurement information
5 Conclusion and Future Directions
In this paper we have introduced both classic results andrecent advances developed inmultisensor fusion and consen-sus filtering First we recalled some important results in thedevelopment of multisensor fusion technology in particularmultisensor fusionwith unknown correlations Next we gavea systematic review of several consensus filtering approacheswhich are widely used to design consensus filter Furthersome latest progress on multisensor fusion and consensusfiltering was also presented To conclude this survey paperbased on the literature reviewed we will offer readers aglimpse of several future directions that may spark theirinterest
(1) Further Divide the Unknown Correlations Althoughthe reasons causing unknown correlations are abun-dant in many real situations we can obtain the par-tial information about unknowns such as uncertain
8 Discrete Dynamics in Nature and Society
system matrix [100 101] uncertain-covariance noise[102] nonfragile filter [103] and uncertain stochasticnonlinearity [100 104] which can be tackled byrobust filtering [100] extendedKalman filtering [105]recursive filtering [106] and 119867
infinrobust filtering
[107] Therefore according to the unknown nature ofunknown correlations it is necessary to further dividethem into two groups partial unknown correlationsand complete unknown correlations Based on thatit is possible to develop new fusion mechanisms orimprove the existing ones to get a better solution forfusion with unknown correlations
(2) Mathematical Characterization of Unknown Correla-tions Due to the intricate unknown nature most ofpublications involving unknown correlations are justlabeling the error cross covariance 119875
119894119895as unknown
without giving their structures which unfortunatelydid not capture the information of correlations andtheir fusion results are inevitably leading to certaindegree of conservatism Reference [57] has made afew attempts to provide an explicit characterizationfor unknown correlation however the derivation iscomplex and not intuitive Hence it is still an openquestion to get a general yet concise mathematicalmodel to describe the unknown correlations
(3) Consensus Filtering with Unknown Correlations Theunknown correlations are ubiquitously existing ingeneral distributed filtering problems they are alsothe major source for the ldquodata insectrdquo phenomenonin the network It is therefore of great importanceto study the consensus filtering problem for systemswith unknown correlations Despite its significancethe progress on this topic is slow Take the covari-ance intersection rule for example how to designconsensus filter which involves information matricesinformation vectors and optimal weights simultane-ouslywithout comprising its performance it would beanother interesting topic
(4) Hybrid Consensus The increasing complexity of sys-tem dynamics and high demands for filter perfor-mance call for the design of the consensus filterwhich should be as good as possible In this spiritthe hybrid consensus filtering scheme which bene-fits from different consensus approaches may meetthese requirements Although initial interests haveappeared in recent years see for example [94 95]it is a trend that more and more hybrid consensusfiltering schemes which blend two ormore consensusfiltering approaches will be constructed in the com-ing future
(5) Stochastic Stability Analysis of Kalman-Like ConsensusFilter In a Kalman-like filter there are two primarysources for error in the estimation initializationerror and stochastic errors due to the process andmeasurement noise [108] However most work hasignored the process and measurement noise whenanalyzing the stability of the consensus filter which is
hardly a reasonable treatmentThe stochastic stabilitylemma [109] may provide a possible solution and hasbeen used as an effective tool for analyzing the singleKalman-like filter see for example [109ndash112] but forthe distributed case its stochastic stability analysisremains to be established
(6) Beyond Consensus Even though the consensus isthe mostly used strategy for the distributed filteringproblems it may not be the best solution for certaincircumstance for example the diffusion strategy[113] is particularly suited for problems involving therecursive minimization of cost functions as opposedto consensus strategy It is therefore of significantengineering importance to find new strategy ormake a trade-off between different strategies for thedistributed filtering problems with new network-induced phenomena such as randomly occurringnonlinearities and fading measurements [114 115]
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the Royal Society of theUK theNational Natural Science Foundation of China underGrants 61329301 61374039 61304010 11301118 and 61573246the Hujiang Foundation of China under Grants C14002and D15009 the Alexander von Humboldt Foundation ofGermany and the Innovation Fund Project for GraduateStudent of Shanghai under Grant JWCXSL1401
References
[1] D L Hall and J Llinas ldquoAn introduction to multisensor datafusionrdquo Proceedings of the IEEE vol 85 no 1 pp 6ndash23 1997
[2] B Khaleghi A Khamis F O Karray and S N Razavi ldquoMulti-sensor data fusion a review of the state-of-the-artrdquo InformationFusion vol 14 no 1 pp 28ndash44 2013
[3] S-L Sun and Z-L Deng ldquoMulti-sensor optimal informationfusion Kalman filterrdquo Automatica vol 40 no 6 pp 1017ndash10232004
[4] R E Kalman ldquoA new approach to linear filtering and predictionproblemsrdquo Journal of Basic Engineering vol 82 no 1 pp 35ndash451960
[5] S J Julier and J K Uhlmann ldquoNon-divergent estimation algo-rithm in the presence of unknown correlationsrdquo in Proceedingsof the 16th American Control Conference vol 4 pp 2369ndash2373June 1997
[6] J K Uhlmann ldquoGeneral data fusion for estimates withunknown cross covariancesrdquo in Signal Processing Sensor Fusionand Target Recognition V vol 2755 of Proceedings of SPIE June1996
[7] Y Wang and X R Li ldquoDistributed estimation fusion withunavailable cross-correlationrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 48 no 1 pp 259ndash278 2012
Discrete Dynamics in Nature and Society 9
[8] A T Kamal J A Farrell and A K Roy-Chowdhury ldquoInfor-mation weighted consensus filters and their application indistributed camera networksrdquo IEEE Transactions on AutomaticControl vol 58 no 12 pp 3112ndash3125 2013
[9] V Ugrinovskii ldquoConditions for detectability in distributedconsensus-based observer networksrdquo IEEE Transactions onAutomatic Control vol 58 no 10 pp 2659ndash2664 2013
[10] G Battistelli L Chisci C Fantacci A Farina and A GrazianoldquoConsensus CPHD filter for distributed multitarget trackingrdquoIEEE Journal on Selected Topics in Signal Processing vol 7 no 3pp 508ndash520 2013
[11] B Shen Z Wang and Y S Hung ldquoDistributed 119867infin-consensus
filtering in sensor networks with multiple missing measure-ments the finite-horizon caserdquo Automatica vol 46 no 10 pp1682ndash1688 2010
[12] I Matei and J S Baras ldquoConsensus-based linear distributedfilteringrdquo Automatica vol 48 no 8 pp 1776ndash1782 2012
[13] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[14] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedings ofthe IEEE vol 95 no 1 pp 215ndash233 2007
[15] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[16] C Fantacci B-N Vo B-T Vo G Battistelli and L ChiscildquoConsensus labeled random finite set filtering for distributedmulti-objecttrackingrdquo httparxivorgabs150101579
[17] D P Spanos R Olfati-Saber and R M Murray ldquoApproximatedistributed kalman filtering in sensor networks with quan-tifiable performancerdquo in Proceedings of the 4th InternationalSymposium on Information Processing in Sensor Networks (IPSNrsquo05) pp 133ndash139 Pasadena Calif USA April 2005
[18] L Xiao S Boyd and S Lall ldquoA Scheme for robust distributedsensor fusion based on average consensusrdquo in Proceedings ofthe 4th International Symposium on Information Processing inSensor Networks (IPSN rsquo05) pp 63ndash70 April 2005
[19] R Olfati-Saber and J S Shamma ldquoConsensus filters for sensornetworks and distributed sensor fusionrdquo in Proceedings of the44th IEEE Conference on Decision and Control and EuropeanControl Conference (CDC-ECC rsquo05) pp 6698ndash6703 IEEEDecember 2005
[20] R Olfati-Saber ldquoDistributed Kalman filter with embeddedconsensus filtersrdquo in Proceedings of the 44th IEEE Conference onDecision and Control and European Control Conference (CDC-ECC rsquo05) pp 8179ndash8184 IEEE December 2005
[21] K J Astrom and P R Kumar ldquoControl a perspectiverdquo Auto-matica vol 50 no 1 pp 3ndash43 2014
[22] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control pp 5492ndash5498 IEEE New Orleans La USADecember 2007
[23] R Olfati-Saber ldquoKalman-consensus filter optimality stabilityand performancerdquo inProceedings of the 48th IEEEConference onDecision and Control 2009 Held Jointly with 2009 28th ChineseControl Conference pp 7036ndash7042 Shanghai ChinaDecember2009
[24] G Battistelli and L Chisci ldquoKullbackndashLeibler average consen-sus on probability densities and distributed state estimation
with guaranteed stabilityrdquo Automatica vol 50 no 3 pp 707ndash718 2014
[25] G Battistelli L Chisci M Stefano and P Francesco ldquoAninformation-theoretic approach to distributed state estimationrdquoin Proceedings of the 18th IFACWorld Congress pp 12477ndash12482Milan Italy August 2011
[26] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
[27] W Yang G Chen X Wang and L Shi ldquoStochastic sensor acti-vation for distributed state estimation over a sensor networkrdquoAutomatica vol 50 no 8 pp 2070ndash2076 2014
[28] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based linear and nonlinear filteringrdquo IEEE Trans-actions on Automatic Control vol 60 no 5 pp 1410ndash1415 2015
[29] N Friedman Seapower as Strategy Navies and National Inter-ests Naval Institute Press 2001
[30] R Singer and A Kanyuck ldquoComputer control of multiple sitetrack correlationrdquo Automatica vol 7 no 4 pp 455ndash463 1971
[31] A S Willsky M G Bello D A Castanon B C Levy andG C Verghese ldquoCombining and updating of local estimatesand regional maps along sets of one-dimensional tracksrdquo IEEETransactions on Automatic Control vol 27 no 4 pp 799ndash8131982
[32] N A Carlson ldquoFederated square root filter for decentralizedparallel processorsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 26 no 3 pp 517ndash525 1990
[33] S Roy and R A Iltis ldquoDecentralized linear estimation incorrelatedmeasurement noiserdquo IEEE Transactions on Aerospaceand Electronic Systems vol 27 no 6 pp 939ndash941 1991
[34] Y Bar-Shalom and L Campo ldquoThe effect of the commonprocess noise on the two-sensor fused-track covariancerdquo IEEETransactions on Aerospace and Electronic Systems vol AES-22no 6 pp 803ndash805 1986
[35] K H Kim ldquoDevelopment of track to track fusion algorithmsrdquoin Proceedings of the 13th American Control Conference vol 1pp 1037ndash1041 Baltimore Md USA June 1994
[36] X R Li Y Zhu JWang andCHan ldquoOptimal linear estimationfusionmdashpart I unified fusion rulesrdquo IEEE Transactions onInformation Theory vol 49 no 9 pp 2192ndash2323 2003
[37] Z-L Deng Y Gao LMao Y Li and G Hao ldquoNew approach toinformation fusion steady-state Kalman filteringrdquo Automaticavol 41 no 10 pp 1695ndash1707 2005
[38] D-J Lee ldquoNonlinear estimation and multiple sensor fusionusing unscented information filteringrdquo IEEE Signal ProcessingLetters vol 15 pp 861ndash864 2008
[39] E Song J Xu and Y Zhu ldquoOptimal distributed Kalmanfiltering fusion with singular covariances of filtering errors andmeasurement noisesrdquo IEEE Transactions on Automatic Controlvol 59 no 5 pp 1271ndash1282 2014
[40] W-A Zhang G Feng and L Yu ldquoMulti-rate distributed fusionestimation for sensor networks with packet lossesrdquoAutomaticavol 48 no 9 pp 2016ndash2028 2012
[41] W-A Zhang S Liu and L Yu ldquoFusion estimation for sensornetworks with nonuniform estimation ratesrdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 61 no 5 pp 1485ndash1498 2014
[42] T D Garvey J D Lowrance and M A Fischler ldquoAn inferencetechnique for integrating knowledge from disparate sourcesrdquoin Proceedings of the International Joint Conference on ArtificialIntelligence pp 319ndash325 Vancouver Canada August 1981
10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Discrete Dynamics in Nature and Society
the Kalman-like filter framework It is well known that theerror covariance matrices may contain valuable informationwhich has been successfully used to improve the filterperformance Taking this into account another consensusapproach that is consensus on measurements (CM) isproposed for fulfilling this requirement It performs a con-sensus on local measurements or more specifically localinnovation pairs so as to approximate in a distributed waythe correction step of the centralized Kalman filter It isworth noticing that the stability of CM consensus filteringcan be ensured only when a sufficiently large number ofconsensus steps are carried out during each sampling intervalso that the local information provided by the innovationpairs has time to spread throughout the whole networkBesides this kind of approach relies on the assumption thatthe measurement errors coming from different sensors aremutually independent and this approach is limited to theKalman-like filters
During the last decade the CM has been broadly used inboth the signal processing and control communities see forexample [20 22 73ndash77]The idea of CMconsensus originallyappeared in [20] to solve the data fusion problems in adistributed way by using low-pass and band-pass consensusfilters A modified version of this consensus approach waspresented in [22Algorithm 1] where two identical consensusfilters were employed and it is applicable to sensor networkwith different observation matrices Further [73] showedthat CM can guarantee that the local estimates of the errorcovariance matrix and local estimates of the state convergeto their centralized ones Later this consensus approach wasapplied to design consensus filter for jump Markov systems[74] and discrete-time nonlinear systems with non-Gaussiannoise [75] In a following paper [76] a pseudo-measurementmatrix was reconstructed by embedding a statistical linearerror propagation approach [78] which facilitates the use ofCM in the unscented Kalman filtering fashion Recently CMwas interpreted as likelihood consensus and applied to thedistributed particle filtering setting [77]
33 Consensus on Information Due to the facts that onlyone or few consensus iterations per time can be affordedin order to reduce the communication overhead for higherenergy efficiency in particular wireless sensor network envi-ronment and there could not be enough time to wait forCM to convergence [79] consequently an alternative con-sensus approach namely consensus on information (CI)was recently invented to circumvent these issues From analgorithm standpoint CI is nothing but forming a localaverage on information matrices and information vectorsThe approach can guarantee stability for any number ofconsensus steps (even for single one) but its mean-squaredestimation error performance may be hampered since thefusion rule adopts a conservative point of view by assumingthat the correlations between local estimates are completelyunknown [28] It was originally introduced in [25] for adistributed state estimation problem later a mathematicalrigorous treatment of it was detailed in [24] where CIis interpreted as a consensus on probability density func-tions in the Kullback-Leibler average sense Following the
same consensus paradigm [10] presented a novel consensuscardinalized probability hypothesis density filter to studythe distributed multitarget tracking problem over a sensornetwork and [80] designed a consensus-based multiple-model Bayesian filter for the distributed tracking task of amaneuvering target More recently [81] applied CI to designthe distributed unscented Kalman filters for systems withstate saturations and sensor saturations
34 119867infin
Consensus It should be pointed out that the afore-mentioned consensus filtering algorithms are mainly basedon the traditional Kalman filtering theory which requiresthe statistic information about plant model to be knownperfectly unfortunately the practical systems are oftenaccompanied with parameter uncertainties and exogenousdisturbances Consequently there is a great impetus todevelop consensus filtering scheme as robust as possibleWith these needs considered the 119867
infinconsensus has been
recently introduced and has been widely recognized see forexample [11 26 82ndash88]
The term 119867infin
consensus was officially coined by [11]the main intuition behind it arises from the notion of 119867
infin
disagreement between adjacent nodes to quantify consensusperformance of the filter network [85] In [11] the 119867
infin
consensus performance requirement has been defined toquantify bounded consensus regarding the filtering errors(agreements) over a finite horizon the paper has con-sidered a distributed 119867
infinconsensus filtering problem for
sensor networks with multiple missing measurements In thesimilar vein [26] has studied the distributed 119867
infinfiltering
with randomly occurring saturation and successive packetdropout Furthermore the119867
infinconsensus approach has been
utilized for solving control problems of multiagent systemsfor example in a novel fuzzy model setting [83] and systemwith missing measurements [82] Most recently [84] has putforward distributed event-triggered 119867
infinconsensus filtering
problems in mobile sensor networks where the transmissionof each sensor was triggered by an event At about thesame time as [11] Ugrinovskii followed a different path toinvestigate the 119867
infinconsensus by using vector dissipativity
methodology see for example [85ndash88] For instance bypursuing 119867
infinconsensus on estimates the distributed robust
filtering problems have been discussed for uncertain systemswith measurement uncertainty [85] a nonvanishing nonlin-ear disturbance with unbounded energy [86] and switchingtopologies [87] lately [88] has laid out 119867
infinconsensus-
based synchronization protocol scheduled for each agent tosynchronize with a reference parameter-varying system
4 Latest Progress
Very recently the research on multisensor fusion and con-sensus filtering is receiving an increasing attention manyinspiring results have been published Here we highlightsome of the newest work with respect to this topic
(1) Fusion with Incomplete Information Due to limitedcapacity of signal transmission through networkedsystems the incomplete information [89] (such as
Discrete Dynamics in Nature and Society 7
missing measurement packet dropout quantiza-tion saturation and networked-induced delay) isinevitable in most of real implementations Thesephenomena may potentially deteriorate the systemperformance accordingly the multisensor fusion forsystems with incomplete information becomes pop-ular For example [90] has developed fusion strate-gies for communication between the sensors andthe estimation center was subject to random packetloss When sensors experience randomly delayedmeasurements and sensor failures [91] has deviseda robust information fusion estimator Lastly [92]has designed an optimal distributed fusion Kalmanfilter with the consideration of missing sensor mea-surements random transmission delays and packetdropouts Very recently [93] was concerned with thedistributed Kalman filtering problem for a class ofnetworked multisensor fusion systems with commu-nication bandwidth constraints
(2) Hybrid CMCI In [28] a new class of consensusfilters (named Hybrid CMCI) which enjoy the com-plementary benefits from two existing consensusfiltering approaches that is CM and CI have beenintroduced for distributed state estimation over sen-sor networks The results have claimed that underminimal requirements (ie collective observabilityand network connectivity) the guaranteed stabilityof the Hybrid CMCI filter can be achieved The ideafirst appeared in [94] more recently a mathematicalrigorous analysis of the Hybrid CMCI consensus forextended Kalman filtering setting has been given in[95]
(3) Set-Theoretic Consensus In [96] under the assump-tion of unknown but bounded measurement errorsa set-theoreticset-membership consensus has beenformulated in a set-theoretic framework Further thepaper has analyzed the consensus algorithms in thecase of undirected and stationary communicationgraphs The result has shown that for both types ofprotocols asymptotic consensus cannot be guaran-teed with respect to all possible noise realizations butthe disagreement among the agent states is asymptot-ically bounded
(4) WeightedAverageConsensus-BasedUnscentedKalmanFiltering Reference [97] has investigated the consen-sus-based distributed state estimation problems fora class of sensor networks within the unscentedKalman filter framework Without approximatinga pseudo-measurement matrix a weighted averageconsensus-based unscented Kalman filtering algo-rithm has been developed which directly imple-mented consensus on state vectors and error covari-ance matrices and its estimation error was proven tobe bounded in mean square
(5) Distributed 119867infin
Consensus Filtering for PiecewiseDiscrete-Time Linear Systems Reference [98] has
studied the distributed 119867infin
consensus filtering prob-lem for a class of piecewise discrete-time linearsystems First the modes and their transitions of aug-mented piecewise linear systems as well as distributedfilters have been formulated Next the structure ofaugmented distributed filter gains has been presentedin virtue of the adjacent matrix of sensor networksBesides a set of sufficient conditions have beenprovided for the distributed filter to ensure that itsdynamics were global asymptotically stable with the119867
infinconsensus performance constraint
(6) Distributed Kalman Consensus Filter with Intermit-tent Observations Reference [99] has considered thedistributed state estimation problem for linear time-varying systems with intermittent observations Inthe paper an optimal Kalman consensus filter hasbeen developed by minimizing the mean-squaredestimation error for each node To derive a scalablealgorithm for the covariance matrices update a sub-optimal filter has also been proposed by omitting theedge covariance matrices among nodes Besides asufficient condition was presented for ensuring thestochastic stability of the suboptimal filter by usingthe Lyapunov-based approach
(7) Information Weighted Consensus As noted in [8]the consensus estimate is suboptimal when the crosscovariances between the individual state estimatesacross different nodes are not incorporated in thedistributed filtering framework The cross covarianceis usually neglected because of the limitations ofthe computational and bandwidth requirements Assuch a consensus filtering scheme should guaranteeconvergence to the optimal centralized estimate aswell as maintaining low computation and commu-nication resource requirements Motivated by theabove discussions [8] has proposed the informationweighted consensus algorithm which can secure theoptimal estimate by proper weighting of the priorstate and measurement information
5 Conclusion and Future Directions
In this paper we have introduced both classic results andrecent advances developed inmultisensor fusion and consen-sus filtering First we recalled some important results in thedevelopment of multisensor fusion technology in particularmultisensor fusionwith unknown correlations Next we gavea systematic review of several consensus filtering approacheswhich are widely used to design consensus filter Furthersome latest progress on multisensor fusion and consensusfiltering was also presented To conclude this survey paperbased on the literature reviewed we will offer readers aglimpse of several future directions that may spark theirinterest
(1) Further Divide the Unknown Correlations Althoughthe reasons causing unknown correlations are abun-dant in many real situations we can obtain the par-tial information about unknowns such as uncertain
8 Discrete Dynamics in Nature and Society
system matrix [100 101] uncertain-covariance noise[102] nonfragile filter [103] and uncertain stochasticnonlinearity [100 104] which can be tackled byrobust filtering [100] extendedKalman filtering [105]recursive filtering [106] and 119867
infinrobust filtering
[107] Therefore according to the unknown nature ofunknown correlations it is necessary to further dividethem into two groups partial unknown correlationsand complete unknown correlations Based on thatit is possible to develop new fusion mechanisms orimprove the existing ones to get a better solution forfusion with unknown correlations
(2) Mathematical Characterization of Unknown Correla-tions Due to the intricate unknown nature most ofpublications involving unknown correlations are justlabeling the error cross covariance 119875
119894119895as unknown
without giving their structures which unfortunatelydid not capture the information of correlations andtheir fusion results are inevitably leading to certaindegree of conservatism Reference [57] has made afew attempts to provide an explicit characterizationfor unknown correlation however the derivation iscomplex and not intuitive Hence it is still an openquestion to get a general yet concise mathematicalmodel to describe the unknown correlations
(3) Consensus Filtering with Unknown Correlations Theunknown correlations are ubiquitously existing ingeneral distributed filtering problems they are alsothe major source for the ldquodata insectrdquo phenomenonin the network It is therefore of great importanceto study the consensus filtering problem for systemswith unknown correlations Despite its significancethe progress on this topic is slow Take the covari-ance intersection rule for example how to designconsensus filter which involves information matricesinformation vectors and optimal weights simultane-ouslywithout comprising its performance it would beanother interesting topic
(4) Hybrid Consensus The increasing complexity of sys-tem dynamics and high demands for filter perfor-mance call for the design of the consensus filterwhich should be as good as possible In this spiritthe hybrid consensus filtering scheme which bene-fits from different consensus approaches may meetthese requirements Although initial interests haveappeared in recent years see for example [94 95]it is a trend that more and more hybrid consensusfiltering schemes which blend two ormore consensusfiltering approaches will be constructed in the com-ing future
(5) Stochastic Stability Analysis of Kalman-Like ConsensusFilter In a Kalman-like filter there are two primarysources for error in the estimation initializationerror and stochastic errors due to the process andmeasurement noise [108] However most work hasignored the process and measurement noise whenanalyzing the stability of the consensus filter which is
hardly a reasonable treatmentThe stochastic stabilitylemma [109] may provide a possible solution and hasbeen used as an effective tool for analyzing the singleKalman-like filter see for example [109ndash112] but forthe distributed case its stochastic stability analysisremains to be established
(6) Beyond Consensus Even though the consensus isthe mostly used strategy for the distributed filteringproblems it may not be the best solution for certaincircumstance for example the diffusion strategy[113] is particularly suited for problems involving therecursive minimization of cost functions as opposedto consensus strategy It is therefore of significantengineering importance to find new strategy ormake a trade-off between different strategies for thedistributed filtering problems with new network-induced phenomena such as randomly occurringnonlinearities and fading measurements [114 115]
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the Royal Society of theUK theNational Natural Science Foundation of China underGrants 61329301 61374039 61304010 11301118 and 61573246the Hujiang Foundation of China under Grants C14002and D15009 the Alexander von Humboldt Foundation ofGermany and the Innovation Fund Project for GraduateStudent of Shanghai under Grant JWCXSL1401
References
[1] D L Hall and J Llinas ldquoAn introduction to multisensor datafusionrdquo Proceedings of the IEEE vol 85 no 1 pp 6ndash23 1997
[2] B Khaleghi A Khamis F O Karray and S N Razavi ldquoMulti-sensor data fusion a review of the state-of-the-artrdquo InformationFusion vol 14 no 1 pp 28ndash44 2013
[3] S-L Sun and Z-L Deng ldquoMulti-sensor optimal informationfusion Kalman filterrdquo Automatica vol 40 no 6 pp 1017ndash10232004
[4] R E Kalman ldquoA new approach to linear filtering and predictionproblemsrdquo Journal of Basic Engineering vol 82 no 1 pp 35ndash451960
[5] S J Julier and J K Uhlmann ldquoNon-divergent estimation algo-rithm in the presence of unknown correlationsrdquo in Proceedingsof the 16th American Control Conference vol 4 pp 2369ndash2373June 1997
[6] J K Uhlmann ldquoGeneral data fusion for estimates withunknown cross covariancesrdquo in Signal Processing Sensor Fusionand Target Recognition V vol 2755 of Proceedings of SPIE June1996
[7] Y Wang and X R Li ldquoDistributed estimation fusion withunavailable cross-correlationrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 48 no 1 pp 259ndash278 2012
Discrete Dynamics in Nature and Society 9
[8] A T Kamal J A Farrell and A K Roy-Chowdhury ldquoInfor-mation weighted consensus filters and their application indistributed camera networksrdquo IEEE Transactions on AutomaticControl vol 58 no 12 pp 3112ndash3125 2013
[9] V Ugrinovskii ldquoConditions for detectability in distributedconsensus-based observer networksrdquo IEEE Transactions onAutomatic Control vol 58 no 10 pp 2659ndash2664 2013
[10] G Battistelli L Chisci C Fantacci A Farina and A GrazianoldquoConsensus CPHD filter for distributed multitarget trackingrdquoIEEE Journal on Selected Topics in Signal Processing vol 7 no 3pp 508ndash520 2013
[11] B Shen Z Wang and Y S Hung ldquoDistributed 119867infin-consensus
filtering in sensor networks with multiple missing measure-ments the finite-horizon caserdquo Automatica vol 46 no 10 pp1682ndash1688 2010
[12] I Matei and J S Baras ldquoConsensus-based linear distributedfilteringrdquo Automatica vol 48 no 8 pp 1776ndash1782 2012
[13] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[14] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedings ofthe IEEE vol 95 no 1 pp 215ndash233 2007
[15] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[16] C Fantacci B-N Vo B-T Vo G Battistelli and L ChiscildquoConsensus labeled random finite set filtering for distributedmulti-objecttrackingrdquo httparxivorgabs150101579
[17] D P Spanos R Olfati-Saber and R M Murray ldquoApproximatedistributed kalman filtering in sensor networks with quan-tifiable performancerdquo in Proceedings of the 4th InternationalSymposium on Information Processing in Sensor Networks (IPSNrsquo05) pp 133ndash139 Pasadena Calif USA April 2005
[18] L Xiao S Boyd and S Lall ldquoA Scheme for robust distributedsensor fusion based on average consensusrdquo in Proceedings ofthe 4th International Symposium on Information Processing inSensor Networks (IPSN rsquo05) pp 63ndash70 April 2005
[19] R Olfati-Saber and J S Shamma ldquoConsensus filters for sensornetworks and distributed sensor fusionrdquo in Proceedings of the44th IEEE Conference on Decision and Control and EuropeanControl Conference (CDC-ECC rsquo05) pp 6698ndash6703 IEEEDecember 2005
[20] R Olfati-Saber ldquoDistributed Kalman filter with embeddedconsensus filtersrdquo in Proceedings of the 44th IEEE Conference onDecision and Control and European Control Conference (CDC-ECC rsquo05) pp 8179ndash8184 IEEE December 2005
[21] K J Astrom and P R Kumar ldquoControl a perspectiverdquo Auto-matica vol 50 no 1 pp 3ndash43 2014
[22] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control pp 5492ndash5498 IEEE New Orleans La USADecember 2007
[23] R Olfati-Saber ldquoKalman-consensus filter optimality stabilityand performancerdquo inProceedings of the 48th IEEEConference onDecision and Control 2009 Held Jointly with 2009 28th ChineseControl Conference pp 7036ndash7042 Shanghai ChinaDecember2009
[24] G Battistelli and L Chisci ldquoKullbackndashLeibler average consen-sus on probability densities and distributed state estimation
with guaranteed stabilityrdquo Automatica vol 50 no 3 pp 707ndash718 2014
[25] G Battistelli L Chisci M Stefano and P Francesco ldquoAninformation-theoretic approach to distributed state estimationrdquoin Proceedings of the 18th IFACWorld Congress pp 12477ndash12482Milan Italy August 2011
[26] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
[27] W Yang G Chen X Wang and L Shi ldquoStochastic sensor acti-vation for distributed state estimation over a sensor networkrdquoAutomatica vol 50 no 8 pp 2070ndash2076 2014
[28] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based linear and nonlinear filteringrdquo IEEE Trans-actions on Automatic Control vol 60 no 5 pp 1410ndash1415 2015
[29] N Friedman Seapower as Strategy Navies and National Inter-ests Naval Institute Press 2001
[30] R Singer and A Kanyuck ldquoComputer control of multiple sitetrack correlationrdquo Automatica vol 7 no 4 pp 455ndash463 1971
[31] A S Willsky M G Bello D A Castanon B C Levy andG C Verghese ldquoCombining and updating of local estimatesand regional maps along sets of one-dimensional tracksrdquo IEEETransactions on Automatic Control vol 27 no 4 pp 799ndash8131982
[32] N A Carlson ldquoFederated square root filter for decentralizedparallel processorsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 26 no 3 pp 517ndash525 1990
[33] S Roy and R A Iltis ldquoDecentralized linear estimation incorrelatedmeasurement noiserdquo IEEE Transactions on Aerospaceand Electronic Systems vol 27 no 6 pp 939ndash941 1991
[34] Y Bar-Shalom and L Campo ldquoThe effect of the commonprocess noise on the two-sensor fused-track covariancerdquo IEEETransactions on Aerospace and Electronic Systems vol AES-22no 6 pp 803ndash805 1986
[35] K H Kim ldquoDevelopment of track to track fusion algorithmsrdquoin Proceedings of the 13th American Control Conference vol 1pp 1037ndash1041 Baltimore Md USA June 1994
[36] X R Li Y Zhu JWang andCHan ldquoOptimal linear estimationfusionmdashpart I unified fusion rulesrdquo IEEE Transactions onInformation Theory vol 49 no 9 pp 2192ndash2323 2003
[37] Z-L Deng Y Gao LMao Y Li and G Hao ldquoNew approach toinformation fusion steady-state Kalman filteringrdquo Automaticavol 41 no 10 pp 1695ndash1707 2005
[38] D-J Lee ldquoNonlinear estimation and multiple sensor fusionusing unscented information filteringrdquo IEEE Signal ProcessingLetters vol 15 pp 861ndash864 2008
[39] E Song J Xu and Y Zhu ldquoOptimal distributed Kalmanfiltering fusion with singular covariances of filtering errors andmeasurement noisesrdquo IEEE Transactions on Automatic Controlvol 59 no 5 pp 1271ndash1282 2014
[40] W-A Zhang G Feng and L Yu ldquoMulti-rate distributed fusionestimation for sensor networks with packet lossesrdquoAutomaticavol 48 no 9 pp 2016ndash2028 2012
[41] W-A Zhang S Liu and L Yu ldquoFusion estimation for sensornetworks with nonuniform estimation ratesrdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 61 no 5 pp 1485ndash1498 2014
[42] T D Garvey J D Lowrance and M A Fischler ldquoAn inferencetechnique for integrating knowledge from disparate sourcesrdquoin Proceedings of the International Joint Conference on ArtificialIntelligence pp 319ndash325 Vancouver Canada August 1981
10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 7
missing measurement packet dropout quantiza-tion saturation and networked-induced delay) isinevitable in most of real implementations Thesephenomena may potentially deteriorate the systemperformance accordingly the multisensor fusion forsystems with incomplete information becomes pop-ular For example [90] has developed fusion strate-gies for communication between the sensors andthe estimation center was subject to random packetloss When sensors experience randomly delayedmeasurements and sensor failures [91] has deviseda robust information fusion estimator Lastly [92]has designed an optimal distributed fusion Kalmanfilter with the consideration of missing sensor mea-surements random transmission delays and packetdropouts Very recently [93] was concerned with thedistributed Kalman filtering problem for a class ofnetworked multisensor fusion systems with commu-nication bandwidth constraints
(2) Hybrid CMCI In [28] a new class of consensusfilters (named Hybrid CMCI) which enjoy the com-plementary benefits from two existing consensusfiltering approaches that is CM and CI have beenintroduced for distributed state estimation over sen-sor networks The results have claimed that underminimal requirements (ie collective observabilityand network connectivity) the guaranteed stabilityof the Hybrid CMCI filter can be achieved The ideafirst appeared in [94] more recently a mathematicalrigorous analysis of the Hybrid CMCI consensus forextended Kalman filtering setting has been given in[95]
(3) Set-Theoretic Consensus In [96] under the assump-tion of unknown but bounded measurement errorsa set-theoreticset-membership consensus has beenformulated in a set-theoretic framework Further thepaper has analyzed the consensus algorithms in thecase of undirected and stationary communicationgraphs The result has shown that for both types ofprotocols asymptotic consensus cannot be guaran-teed with respect to all possible noise realizations butthe disagreement among the agent states is asymptot-ically bounded
(4) WeightedAverageConsensus-BasedUnscentedKalmanFiltering Reference [97] has investigated the consen-sus-based distributed state estimation problems fora class of sensor networks within the unscentedKalman filter framework Without approximatinga pseudo-measurement matrix a weighted averageconsensus-based unscented Kalman filtering algo-rithm has been developed which directly imple-mented consensus on state vectors and error covari-ance matrices and its estimation error was proven tobe bounded in mean square
(5) Distributed 119867infin
Consensus Filtering for PiecewiseDiscrete-Time Linear Systems Reference [98] has
studied the distributed 119867infin
consensus filtering prob-lem for a class of piecewise discrete-time linearsystems First the modes and their transitions of aug-mented piecewise linear systems as well as distributedfilters have been formulated Next the structure ofaugmented distributed filter gains has been presentedin virtue of the adjacent matrix of sensor networksBesides a set of sufficient conditions have beenprovided for the distributed filter to ensure that itsdynamics were global asymptotically stable with the119867
infinconsensus performance constraint
(6) Distributed Kalman Consensus Filter with Intermit-tent Observations Reference [99] has considered thedistributed state estimation problem for linear time-varying systems with intermittent observations Inthe paper an optimal Kalman consensus filter hasbeen developed by minimizing the mean-squaredestimation error for each node To derive a scalablealgorithm for the covariance matrices update a sub-optimal filter has also been proposed by omitting theedge covariance matrices among nodes Besides asufficient condition was presented for ensuring thestochastic stability of the suboptimal filter by usingthe Lyapunov-based approach
(7) Information Weighted Consensus As noted in [8]the consensus estimate is suboptimal when the crosscovariances between the individual state estimatesacross different nodes are not incorporated in thedistributed filtering framework The cross covarianceis usually neglected because of the limitations ofthe computational and bandwidth requirements Assuch a consensus filtering scheme should guaranteeconvergence to the optimal centralized estimate aswell as maintaining low computation and commu-nication resource requirements Motivated by theabove discussions [8] has proposed the informationweighted consensus algorithm which can secure theoptimal estimate by proper weighting of the priorstate and measurement information
5 Conclusion and Future Directions
In this paper we have introduced both classic results andrecent advances developed inmultisensor fusion and consen-sus filtering First we recalled some important results in thedevelopment of multisensor fusion technology in particularmultisensor fusionwith unknown correlations Next we gavea systematic review of several consensus filtering approacheswhich are widely used to design consensus filter Furthersome latest progress on multisensor fusion and consensusfiltering was also presented To conclude this survey paperbased on the literature reviewed we will offer readers aglimpse of several future directions that may spark theirinterest
(1) Further Divide the Unknown Correlations Althoughthe reasons causing unknown correlations are abun-dant in many real situations we can obtain the par-tial information about unknowns such as uncertain
8 Discrete Dynamics in Nature and Society
system matrix [100 101] uncertain-covariance noise[102] nonfragile filter [103] and uncertain stochasticnonlinearity [100 104] which can be tackled byrobust filtering [100] extendedKalman filtering [105]recursive filtering [106] and 119867
infinrobust filtering
[107] Therefore according to the unknown nature ofunknown correlations it is necessary to further dividethem into two groups partial unknown correlationsand complete unknown correlations Based on thatit is possible to develop new fusion mechanisms orimprove the existing ones to get a better solution forfusion with unknown correlations
(2) Mathematical Characterization of Unknown Correla-tions Due to the intricate unknown nature most ofpublications involving unknown correlations are justlabeling the error cross covariance 119875
119894119895as unknown
without giving their structures which unfortunatelydid not capture the information of correlations andtheir fusion results are inevitably leading to certaindegree of conservatism Reference [57] has made afew attempts to provide an explicit characterizationfor unknown correlation however the derivation iscomplex and not intuitive Hence it is still an openquestion to get a general yet concise mathematicalmodel to describe the unknown correlations
(3) Consensus Filtering with Unknown Correlations Theunknown correlations are ubiquitously existing ingeneral distributed filtering problems they are alsothe major source for the ldquodata insectrdquo phenomenonin the network It is therefore of great importanceto study the consensus filtering problem for systemswith unknown correlations Despite its significancethe progress on this topic is slow Take the covari-ance intersection rule for example how to designconsensus filter which involves information matricesinformation vectors and optimal weights simultane-ouslywithout comprising its performance it would beanother interesting topic
(4) Hybrid Consensus The increasing complexity of sys-tem dynamics and high demands for filter perfor-mance call for the design of the consensus filterwhich should be as good as possible In this spiritthe hybrid consensus filtering scheme which bene-fits from different consensus approaches may meetthese requirements Although initial interests haveappeared in recent years see for example [94 95]it is a trend that more and more hybrid consensusfiltering schemes which blend two ormore consensusfiltering approaches will be constructed in the com-ing future
(5) Stochastic Stability Analysis of Kalman-Like ConsensusFilter In a Kalman-like filter there are two primarysources for error in the estimation initializationerror and stochastic errors due to the process andmeasurement noise [108] However most work hasignored the process and measurement noise whenanalyzing the stability of the consensus filter which is
hardly a reasonable treatmentThe stochastic stabilitylemma [109] may provide a possible solution and hasbeen used as an effective tool for analyzing the singleKalman-like filter see for example [109ndash112] but forthe distributed case its stochastic stability analysisremains to be established
(6) Beyond Consensus Even though the consensus isthe mostly used strategy for the distributed filteringproblems it may not be the best solution for certaincircumstance for example the diffusion strategy[113] is particularly suited for problems involving therecursive minimization of cost functions as opposedto consensus strategy It is therefore of significantengineering importance to find new strategy ormake a trade-off between different strategies for thedistributed filtering problems with new network-induced phenomena such as randomly occurringnonlinearities and fading measurements [114 115]
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the Royal Society of theUK theNational Natural Science Foundation of China underGrants 61329301 61374039 61304010 11301118 and 61573246the Hujiang Foundation of China under Grants C14002and D15009 the Alexander von Humboldt Foundation ofGermany and the Innovation Fund Project for GraduateStudent of Shanghai under Grant JWCXSL1401
References
[1] D L Hall and J Llinas ldquoAn introduction to multisensor datafusionrdquo Proceedings of the IEEE vol 85 no 1 pp 6ndash23 1997
[2] B Khaleghi A Khamis F O Karray and S N Razavi ldquoMulti-sensor data fusion a review of the state-of-the-artrdquo InformationFusion vol 14 no 1 pp 28ndash44 2013
[3] S-L Sun and Z-L Deng ldquoMulti-sensor optimal informationfusion Kalman filterrdquo Automatica vol 40 no 6 pp 1017ndash10232004
[4] R E Kalman ldquoA new approach to linear filtering and predictionproblemsrdquo Journal of Basic Engineering vol 82 no 1 pp 35ndash451960
[5] S J Julier and J K Uhlmann ldquoNon-divergent estimation algo-rithm in the presence of unknown correlationsrdquo in Proceedingsof the 16th American Control Conference vol 4 pp 2369ndash2373June 1997
[6] J K Uhlmann ldquoGeneral data fusion for estimates withunknown cross covariancesrdquo in Signal Processing Sensor Fusionand Target Recognition V vol 2755 of Proceedings of SPIE June1996
[7] Y Wang and X R Li ldquoDistributed estimation fusion withunavailable cross-correlationrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 48 no 1 pp 259ndash278 2012
Discrete Dynamics in Nature and Society 9
[8] A T Kamal J A Farrell and A K Roy-Chowdhury ldquoInfor-mation weighted consensus filters and their application indistributed camera networksrdquo IEEE Transactions on AutomaticControl vol 58 no 12 pp 3112ndash3125 2013
[9] V Ugrinovskii ldquoConditions for detectability in distributedconsensus-based observer networksrdquo IEEE Transactions onAutomatic Control vol 58 no 10 pp 2659ndash2664 2013
[10] G Battistelli L Chisci C Fantacci A Farina and A GrazianoldquoConsensus CPHD filter for distributed multitarget trackingrdquoIEEE Journal on Selected Topics in Signal Processing vol 7 no 3pp 508ndash520 2013
[11] B Shen Z Wang and Y S Hung ldquoDistributed 119867infin-consensus
filtering in sensor networks with multiple missing measure-ments the finite-horizon caserdquo Automatica vol 46 no 10 pp1682ndash1688 2010
[12] I Matei and J S Baras ldquoConsensus-based linear distributedfilteringrdquo Automatica vol 48 no 8 pp 1776ndash1782 2012
[13] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[14] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedings ofthe IEEE vol 95 no 1 pp 215ndash233 2007
[15] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[16] C Fantacci B-N Vo B-T Vo G Battistelli and L ChiscildquoConsensus labeled random finite set filtering for distributedmulti-objecttrackingrdquo httparxivorgabs150101579
[17] D P Spanos R Olfati-Saber and R M Murray ldquoApproximatedistributed kalman filtering in sensor networks with quan-tifiable performancerdquo in Proceedings of the 4th InternationalSymposium on Information Processing in Sensor Networks (IPSNrsquo05) pp 133ndash139 Pasadena Calif USA April 2005
[18] L Xiao S Boyd and S Lall ldquoA Scheme for robust distributedsensor fusion based on average consensusrdquo in Proceedings ofthe 4th International Symposium on Information Processing inSensor Networks (IPSN rsquo05) pp 63ndash70 April 2005
[19] R Olfati-Saber and J S Shamma ldquoConsensus filters for sensornetworks and distributed sensor fusionrdquo in Proceedings of the44th IEEE Conference on Decision and Control and EuropeanControl Conference (CDC-ECC rsquo05) pp 6698ndash6703 IEEEDecember 2005
[20] R Olfati-Saber ldquoDistributed Kalman filter with embeddedconsensus filtersrdquo in Proceedings of the 44th IEEE Conference onDecision and Control and European Control Conference (CDC-ECC rsquo05) pp 8179ndash8184 IEEE December 2005
[21] K J Astrom and P R Kumar ldquoControl a perspectiverdquo Auto-matica vol 50 no 1 pp 3ndash43 2014
[22] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control pp 5492ndash5498 IEEE New Orleans La USADecember 2007
[23] R Olfati-Saber ldquoKalman-consensus filter optimality stabilityand performancerdquo inProceedings of the 48th IEEEConference onDecision and Control 2009 Held Jointly with 2009 28th ChineseControl Conference pp 7036ndash7042 Shanghai ChinaDecember2009
[24] G Battistelli and L Chisci ldquoKullbackndashLeibler average consen-sus on probability densities and distributed state estimation
with guaranteed stabilityrdquo Automatica vol 50 no 3 pp 707ndash718 2014
[25] G Battistelli L Chisci M Stefano and P Francesco ldquoAninformation-theoretic approach to distributed state estimationrdquoin Proceedings of the 18th IFACWorld Congress pp 12477ndash12482Milan Italy August 2011
[26] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
[27] W Yang G Chen X Wang and L Shi ldquoStochastic sensor acti-vation for distributed state estimation over a sensor networkrdquoAutomatica vol 50 no 8 pp 2070ndash2076 2014
[28] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based linear and nonlinear filteringrdquo IEEE Trans-actions on Automatic Control vol 60 no 5 pp 1410ndash1415 2015
[29] N Friedman Seapower as Strategy Navies and National Inter-ests Naval Institute Press 2001
[30] R Singer and A Kanyuck ldquoComputer control of multiple sitetrack correlationrdquo Automatica vol 7 no 4 pp 455ndash463 1971
[31] A S Willsky M G Bello D A Castanon B C Levy andG C Verghese ldquoCombining and updating of local estimatesand regional maps along sets of one-dimensional tracksrdquo IEEETransactions on Automatic Control vol 27 no 4 pp 799ndash8131982
[32] N A Carlson ldquoFederated square root filter for decentralizedparallel processorsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 26 no 3 pp 517ndash525 1990
[33] S Roy and R A Iltis ldquoDecentralized linear estimation incorrelatedmeasurement noiserdquo IEEE Transactions on Aerospaceand Electronic Systems vol 27 no 6 pp 939ndash941 1991
[34] Y Bar-Shalom and L Campo ldquoThe effect of the commonprocess noise on the two-sensor fused-track covariancerdquo IEEETransactions on Aerospace and Electronic Systems vol AES-22no 6 pp 803ndash805 1986
[35] K H Kim ldquoDevelopment of track to track fusion algorithmsrdquoin Proceedings of the 13th American Control Conference vol 1pp 1037ndash1041 Baltimore Md USA June 1994
[36] X R Li Y Zhu JWang andCHan ldquoOptimal linear estimationfusionmdashpart I unified fusion rulesrdquo IEEE Transactions onInformation Theory vol 49 no 9 pp 2192ndash2323 2003
[37] Z-L Deng Y Gao LMao Y Li and G Hao ldquoNew approach toinformation fusion steady-state Kalman filteringrdquo Automaticavol 41 no 10 pp 1695ndash1707 2005
[38] D-J Lee ldquoNonlinear estimation and multiple sensor fusionusing unscented information filteringrdquo IEEE Signal ProcessingLetters vol 15 pp 861ndash864 2008
[39] E Song J Xu and Y Zhu ldquoOptimal distributed Kalmanfiltering fusion with singular covariances of filtering errors andmeasurement noisesrdquo IEEE Transactions on Automatic Controlvol 59 no 5 pp 1271ndash1282 2014
[40] W-A Zhang G Feng and L Yu ldquoMulti-rate distributed fusionestimation for sensor networks with packet lossesrdquoAutomaticavol 48 no 9 pp 2016ndash2028 2012
[41] W-A Zhang S Liu and L Yu ldquoFusion estimation for sensornetworks with nonuniform estimation ratesrdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 61 no 5 pp 1485ndash1498 2014
[42] T D Garvey J D Lowrance and M A Fischler ldquoAn inferencetechnique for integrating knowledge from disparate sourcesrdquoin Proceedings of the International Joint Conference on ArtificialIntelligence pp 319ndash325 Vancouver Canada August 1981
10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Discrete Dynamics in Nature and Society
system matrix [100 101] uncertain-covariance noise[102] nonfragile filter [103] and uncertain stochasticnonlinearity [100 104] which can be tackled byrobust filtering [100] extendedKalman filtering [105]recursive filtering [106] and 119867
infinrobust filtering
[107] Therefore according to the unknown nature ofunknown correlations it is necessary to further dividethem into two groups partial unknown correlationsand complete unknown correlations Based on thatit is possible to develop new fusion mechanisms orimprove the existing ones to get a better solution forfusion with unknown correlations
(2) Mathematical Characterization of Unknown Correla-tions Due to the intricate unknown nature most ofpublications involving unknown correlations are justlabeling the error cross covariance 119875
119894119895as unknown
without giving their structures which unfortunatelydid not capture the information of correlations andtheir fusion results are inevitably leading to certaindegree of conservatism Reference [57] has made afew attempts to provide an explicit characterizationfor unknown correlation however the derivation iscomplex and not intuitive Hence it is still an openquestion to get a general yet concise mathematicalmodel to describe the unknown correlations
(3) Consensus Filtering with Unknown Correlations Theunknown correlations are ubiquitously existing ingeneral distributed filtering problems they are alsothe major source for the ldquodata insectrdquo phenomenonin the network It is therefore of great importanceto study the consensus filtering problem for systemswith unknown correlations Despite its significancethe progress on this topic is slow Take the covari-ance intersection rule for example how to designconsensus filter which involves information matricesinformation vectors and optimal weights simultane-ouslywithout comprising its performance it would beanother interesting topic
(4) Hybrid Consensus The increasing complexity of sys-tem dynamics and high demands for filter perfor-mance call for the design of the consensus filterwhich should be as good as possible In this spiritthe hybrid consensus filtering scheme which bene-fits from different consensus approaches may meetthese requirements Although initial interests haveappeared in recent years see for example [94 95]it is a trend that more and more hybrid consensusfiltering schemes which blend two ormore consensusfiltering approaches will be constructed in the com-ing future
(5) Stochastic Stability Analysis of Kalman-Like ConsensusFilter In a Kalman-like filter there are two primarysources for error in the estimation initializationerror and stochastic errors due to the process andmeasurement noise [108] However most work hasignored the process and measurement noise whenanalyzing the stability of the consensus filter which is
hardly a reasonable treatmentThe stochastic stabilitylemma [109] may provide a possible solution and hasbeen used as an effective tool for analyzing the singleKalman-like filter see for example [109ndash112] but forthe distributed case its stochastic stability analysisremains to be established
(6) Beyond Consensus Even though the consensus isthe mostly used strategy for the distributed filteringproblems it may not be the best solution for certaincircumstance for example the diffusion strategy[113] is particularly suited for problems involving therecursive minimization of cost functions as opposedto consensus strategy It is therefore of significantengineering importance to find new strategy ormake a trade-off between different strategies for thedistributed filtering problems with new network-induced phenomena such as randomly occurringnonlinearities and fading measurements [114 115]
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the Royal Society of theUK theNational Natural Science Foundation of China underGrants 61329301 61374039 61304010 11301118 and 61573246the Hujiang Foundation of China under Grants C14002and D15009 the Alexander von Humboldt Foundation ofGermany and the Innovation Fund Project for GraduateStudent of Shanghai under Grant JWCXSL1401
References
[1] D L Hall and J Llinas ldquoAn introduction to multisensor datafusionrdquo Proceedings of the IEEE vol 85 no 1 pp 6ndash23 1997
[2] B Khaleghi A Khamis F O Karray and S N Razavi ldquoMulti-sensor data fusion a review of the state-of-the-artrdquo InformationFusion vol 14 no 1 pp 28ndash44 2013
[3] S-L Sun and Z-L Deng ldquoMulti-sensor optimal informationfusion Kalman filterrdquo Automatica vol 40 no 6 pp 1017ndash10232004
[4] R E Kalman ldquoA new approach to linear filtering and predictionproblemsrdquo Journal of Basic Engineering vol 82 no 1 pp 35ndash451960
[5] S J Julier and J K Uhlmann ldquoNon-divergent estimation algo-rithm in the presence of unknown correlationsrdquo in Proceedingsof the 16th American Control Conference vol 4 pp 2369ndash2373June 1997
[6] J K Uhlmann ldquoGeneral data fusion for estimates withunknown cross covariancesrdquo in Signal Processing Sensor Fusionand Target Recognition V vol 2755 of Proceedings of SPIE June1996
[7] Y Wang and X R Li ldquoDistributed estimation fusion withunavailable cross-correlationrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 48 no 1 pp 259ndash278 2012
Discrete Dynamics in Nature and Society 9
[8] A T Kamal J A Farrell and A K Roy-Chowdhury ldquoInfor-mation weighted consensus filters and their application indistributed camera networksrdquo IEEE Transactions on AutomaticControl vol 58 no 12 pp 3112ndash3125 2013
[9] V Ugrinovskii ldquoConditions for detectability in distributedconsensus-based observer networksrdquo IEEE Transactions onAutomatic Control vol 58 no 10 pp 2659ndash2664 2013
[10] G Battistelli L Chisci C Fantacci A Farina and A GrazianoldquoConsensus CPHD filter for distributed multitarget trackingrdquoIEEE Journal on Selected Topics in Signal Processing vol 7 no 3pp 508ndash520 2013
[11] B Shen Z Wang and Y S Hung ldquoDistributed 119867infin-consensus
filtering in sensor networks with multiple missing measure-ments the finite-horizon caserdquo Automatica vol 46 no 10 pp1682ndash1688 2010
[12] I Matei and J S Baras ldquoConsensus-based linear distributedfilteringrdquo Automatica vol 48 no 8 pp 1776ndash1782 2012
[13] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[14] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedings ofthe IEEE vol 95 no 1 pp 215ndash233 2007
[15] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[16] C Fantacci B-N Vo B-T Vo G Battistelli and L ChiscildquoConsensus labeled random finite set filtering for distributedmulti-objecttrackingrdquo httparxivorgabs150101579
[17] D P Spanos R Olfati-Saber and R M Murray ldquoApproximatedistributed kalman filtering in sensor networks with quan-tifiable performancerdquo in Proceedings of the 4th InternationalSymposium on Information Processing in Sensor Networks (IPSNrsquo05) pp 133ndash139 Pasadena Calif USA April 2005
[18] L Xiao S Boyd and S Lall ldquoA Scheme for robust distributedsensor fusion based on average consensusrdquo in Proceedings ofthe 4th International Symposium on Information Processing inSensor Networks (IPSN rsquo05) pp 63ndash70 April 2005
[19] R Olfati-Saber and J S Shamma ldquoConsensus filters for sensornetworks and distributed sensor fusionrdquo in Proceedings of the44th IEEE Conference on Decision and Control and EuropeanControl Conference (CDC-ECC rsquo05) pp 6698ndash6703 IEEEDecember 2005
[20] R Olfati-Saber ldquoDistributed Kalman filter with embeddedconsensus filtersrdquo in Proceedings of the 44th IEEE Conference onDecision and Control and European Control Conference (CDC-ECC rsquo05) pp 8179ndash8184 IEEE December 2005
[21] K J Astrom and P R Kumar ldquoControl a perspectiverdquo Auto-matica vol 50 no 1 pp 3ndash43 2014
[22] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control pp 5492ndash5498 IEEE New Orleans La USADecember 2007
[23] R Olfati-Saber ldquoKalman-consensus filter optimality stabilityand performancerdquo inProceedings of the 48th IEEEConference onDecision and Control 2009 Held Jointly with 2009 28th ChineseControl Conference pp 7036ndash7042 Shanghai ChinaDecember2009
[24] G Battistelli and L Chisci ldquoKullbackndashLeibler average consen-sus on probability densities and distributed state estimation
with guaranteed stabilityrdquo Automatica vol 50 no 3 pp 707ndash718 2014
[25] G Battistelli L Chisci M Stefano and P Francesco ldquoAninformation-theoretic approach to distributed state estimationrdquoin Proceedings of the 18th IFACWorld Congress pp 12477ndash12482Milan Italy August 2011
[26] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
[27] W Yang G Chen X Wang and L Shi ldquoStochastic sensor acti-vation for distributed state estimation over a sensor networkrdquoAutomatica vol 50 no 8 pp 2070ndash2076 2014
[28] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based linear and nonlinear filteringrdquo IEEE Trans-actions on Automatic Control vol 60 no 5 pp 1410ndash1415 2015
[29] N Friedman Seapower as Strategy Navies and National Inter-ests Naval Institute Press 2001
[30] R Singer and A Kanyuck ldquoComputer control of multiple sitetrack correlationrdquo Automatica vol 7 no 4 pp 455ndash463 1971
[31] A S Willsky M G Bello D A Castanon B C Levy andG C Verghese ldquoCombining and updating of local estimatesand regional maps along sets of one-dimensional tracksrdquo IEEETransactions on Automatic Control vol 27 no 4 pp 799ndash8131982
[32] N A Carlson ldquoFederated square root filter for decentralizedparallel processorsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 26 no 3 pp 517ndash525 1990
[33] S Roy and R A Iltis ldquoDecentralized linear estimation incorrelatedmeasurement noiserdquo IEEE Transactions on Aerospaceand Electronic Systems vol 27 no 6 pp 939ndash941 1991
[34] Y Bar-Shalom and L Campo ldquoThe effect of the commonprocess noise on the two-sensor fused-track covariancerdquo IEEETransactions on Aerospace and Electronic Systems vol AES-22no 6 pp 803ndash805 1986
[35] K H Kim ldquoDevelopment of track to track fusion algorithmsrdquoin Proceedings of the 13th American Control Conference vol 1pp 1037ndash1041 Baltimore Md USA June 1994
[36] X R Li Y Zhu JWang andCHan ldquoOptimal linear estimationfusionmdashpart I unified fusion rulesrdquo IEEE Transactions onInformation Theory vol 49 no 9 pp 2192ndash2323 2003
[37] Z-L Deng Y Gao LMao Y Li and G Hao ldquoNew approach toinformation fusion steady-state Kalman filteringrdquo Automaticavol 41 no 10 pp 1695ndash1707 2005
[38] D-J Lee ldquoNonlinear estimation and multiple sensor fusionusing unscented information filteringrdquo IEEE Signal ProcessingLetters vol 15 pp 861ndash864 2008
[39] E Song J Xu and Y Zhu ldquoOptimal distributed Kalmanfiltering fusion with singular covariances of filtering errors andmeasurement noisesrdquo IEEE Transactions on Automatic Controlvol 59 no 5 pp 1271ndash1282 2014
[40] W-A Zhang G Feng and L Yu ldquoMulti-rate distributed fusionestimation for sensor networks with packet lossesrdquoAutomaticavol 48 no 9 pp 2016ndash2028 2012
[41] W-A Zhang S Liu and L Yu ldquoFusion estimation for sensornetworks with nonuniform estimation ratesrdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 61 no 5 pp 1485ndash1498 2014
[42] T D Garvey J D Lowrance and M A Fischler ldquoAn inferencetechnique for integrating knowledge from disparate sourcesrdquoin Proceedings of the International Joint Conference on ArtificialIntelligence pp 319ndash325 Vancouver Canada August 1981
10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 9
[8] A T Kamal J A Farrell and A K Roy-Chowdhury ldquoInfor-mation weighted consensus filters and their application indistributed camera networksrdquo IEEE Transactions on AutomaticControl vol 58 no 12 pp 3112ndash3125 2013
[9] V Ugrinovskii ldquoConditions for detectability in distributedconsensus-based observer networksrdquo IEEE Transactions onAutomatic Control vol 58 no 10 pp 2659ndash2664 2013
[10] G Battistelli L Chisci C Fantacci A Farina and A GrazianoldquoConsensus CPHD filter for distributed multitarget trackingrdquoIEEE Journal on Selected Topics in Signal Processing vol 7 no 3pp 508ndash520 2013
[11] B Shen Z Wang and Y S Hung ldquoDistributed 119867infin-consensus
filtering in sensor networks with multiple missing measure-ments the finite-horizon caserdquo Automatica vol 46 no 10 pp1682ndash1688 2010
[12] I Matei and J S Baras ldquoConsensus-based linear distributedfilteringrdquo Automatica vol 48 no 8 pp 1776ndash1782 2012
[13] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[14] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedings ofthe IEEE vol 95 no 1 pp 215ndash233 2007
[15] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[16] C Fantacci B-N Vo B-T Vo G Battistelli and L ChiscildquoConsensus labeled random finite set filtering for distributedmulti-objecttrackingrdquo httparxivorgabs150101579
[17] D P Spanos R Olfati-Saber and R M Murray ldquoApproximatedistributed kalman filtering in sensor networks with quan-tifiable performancerdquo in Proceedings of the 4th InternationalSymposium on Information Processing in Sensor Networks (IPSNrsquo05) pp 133ndash139 Pasadena Calif USA April 2005
[18] L Xiao S Boyd and S Lall ldquoA Scheme for robust distributedsensor fusion based on average consensusrdquo in Proceedings ofthe 4th International Symposium on Information Processing inSensor Networks (IPSN rsquo05) pp 63ndash70 April 2005
[19] R Olfati-Saber and J S Shamma ldquoConsensus filters for sensornetworks and distributed sensor fusionrdquo in Proceedings of the44th IEEE Conference on Decision and Control and EuropeanControl Conference (CDC-ECC rsquo05) pp 6698ndash6703 IEEEDecember 2005
[20] R Olfati-Saber ldquoDistributed Kalman filter with embeddedconsensus filtersrdquo in Proceedings of the 44th IEEE Conference onDecision and Control and European Control Conference (CDC-ECC rsquo05) pp 8179ndash8184 IEEE December 2005
[21] K J Astrom and P R Kumar ldquoControl a perspectiverdquo Auto-matica vol 50 no 1 pp 3ndash43 2014
[22] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control pp 5492ndash5498 IEEE New Orleans La USADecember 2007
[23] R Olfati-Saber ldquoKalman-consensus filter optimality stabilityand performancerdquo inProceedings of the 48th IEEEConference onDecision and Control 2009 Held Jointly with 2009 28th ChineseControl Conference pp 7036ndash7042 Shanghai ChinaDecember2009
[24] G Battistelli and L Chisci ldquoKullbackndashLeibler average consen-sus on probability densities and distributed state estimation
with guaranteed stabilityrdquo Automatica vol 50 no 3 pp 707ndash718 2014
[25] G Battistelli L Chisci M Stefano and P Francesco ldquoAninformation-theoretic approach to distributed state estimationrdquoin Proceedings of the 18th IFACWorld Congress pp 12477ndash12482Milan Italy August 2011
[26] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
[27] W Yang G Chen X Wang and L Shi ldquoStochastic sensor acti-vation for distributed state estimation over a sensor networkrdquoAutomatica vol 50 no 8 pp 2070ndash2076 2014
[28] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based linear and nonlinear filteringrdquo IEEE Trans-actions on Automatic Control vol 60 no 5 pp 1410ndash1415 2015
[29] N Friedman Seapower as Strategy Navies and National Inter-ests Naval Institute Press 2001
[30] R Singer and A Kanyuck ldquoComputer control of multiple sitetrack correlationrdquo Automatica vol 7 no 4 pp 455ndash463 1971
[31] A S Willsky M G Bello D A Castanon B C Levy andG C Verghese ldquoCombining and updating of local estimatesand regional maps along sets of one-dimensional tracksrdquo IEEETransactions on Automatic Control vol 27 no 4 pp 799ndash8131982
[32] N A Carlson ldquoFederated square root filter for decentralizedparallel processorsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 26 no 3 pp 517ndash525 1990
[33] S Roy and R A Iltis ldquoDecentralized linear estimation incorrelatedmeasurement noiserdquo IEEE Transactions on Aerospaceand Electronic Systems vol 27 no 6 pp 939ndash941 1991
[34] Y Bar-Shalom and L Campo ldquoThe effect of the commonprocess noise on the two-sensor fused-track covariancerdquo IEEETransactions on Aerospace and Electronic Systems vol AES-22no 6 pp 803ndash805 1986
[35] K H Kim ldquoDevelopment of track to track fusion algorithmsrdquoin Proceedings of the 13th American Control Conference vol 1pp 1037ndash1041 Baltimore Md USA June 1994
[36] X R Li Y Zhu JWang andCHan ldquoOptimal linear estimationfusionmdashpart I unified fusion rulesrdquo IEEE Transactions onInformation Theory vol 49 no 9 pp 2192ndash2323 2003
[37] Z-L Deng Y Gao LMao Y Li and G Hao ldquoNew approach toinformation fusion steady-state Kalman filteringrdquo Automaticavol 41 no 10 pp 1695ndash1707 2005
[38] D-J Lee ldquoNonlinear estimation and multiple sensor fusionusing unscented information filteringrdquo IEEE Signal ProcessingLetters vol 15 pp 861ndash864 2008
[39] E Song J Xu and Y Zhu ldquoOptimal distributed Kalmanfiltering fusion with singular covariances of filtering errors andmeasurement noisesrdquo IEEE Transactions on Automatic Controlvol 59 no 5 pp 1271ndash1282 2014
[40] W-A Zhang G Feng and L Yu ldquoMulti-rate distributed fusionestimation for sensor networks with packet lossesrdquoAutomaticavol 48 no 9 pp 2016ndash2028 2012
[41] W-A Zhang S Liu and L Yu ldquoFusion estimation for sensornetworks with nonuniform estimation ratesrdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 61 no 5 pp 1485ndash1498 2014
[42] T D Garvey J D Lowrance and M A Fischler ldquoAn inferencetechnique for integrating knowledge from disparate sourcesrdquoin Proceedings of the International Joint Conference on ArtificialIntelligence pp 319ndash325 Vancouver Canada August 1981
10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Discrete Dynamics in Nature and Society
[43] H Zhu and O Basir ldquoA novel fuzzy evidential reasoningparadigm for data fusion with applications in image process-ingrdquo Soft Computing vol 10 no 12 pp 1169ndash1180 2006
[44] D Dubois and H Prade ldquoPossibility theory and data fusion inpoorly informed environmentsrdquo Control Engineering Practicevol 2 no 5 pp 811ndash823 1994
[45] O Basir F Karray and H Zhu ldquoConnectionist-basedDempster-Shafer evidential reasoning for data fusionrdquo IEEETransactions on Neural Networks vol 16 no 6 pp 1513ndash15302005
[46] R P S Mahler ldquolsquoStatistics 101rsquo for multisensor multitarget datafusionrdquo IEEE Aerospace and Electronic Systems Magazine vol19 no 1 pp 53ndash64 2004
[47] J K Uhlmann Dynamic map building and localization newtheoretical foundations [PhD thesis] University of OxfordOxford UK 1995
[48] A Makarenko A Brooks T Kaupp H Durrant-Whyte andF Dellaert ldquoDecentralised data fusion a graphical modelapproachrdquo in Proceedings of the 12th International Conference onInformation Fusion (FUSION rsquo09) pp 545ndash554 Seattle WashUSA July 2009
[49] K C Chang C-Y Chong and S Mori ldquoAnalytical and com-putational evaluation of scalable distributed fusion algorithmsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 46no 4 pp 2022ndash2034 2010
[50] W Niehsen ldquoInformation fusion based on fast covarianceintersection filteringrdquo in Proceedings of the 5th InternationalConference on Information Fusion (FUSION rsquo02) pp 901ndash904IEEE Annapolis Md USA July 2002
[51] Z Deng P Zhang W Qi J Liu and Y Gao ldquoSequential covari-ance intersection fusion Kalman filterrdquo Information Sciencesvol 189 pp 293ndash309 2012
[52] S J Julier and J K Uhlmann ldquoGeneral decentralized datafusion with covariance intersection (CI)rdquo in Handbook of DataFusion CRC Press 2001
[53] L Chen P O Arambel and R K Mehra ldquoEstimation underunknown correlation covariance intersection revisitedrdquo IEEETransactions on Automatic Control vol 47 no 11 pp 1879ndash18822002
[54] M B Hurley ldquoAn information theoretic justification for covari-ance intersection and its generalizationrdquo in Proceedings of the5th International Conference on Information Fusion vol 1 pp505ndash511 IEEE Annapolis Md USA July 2002
[55] W J Farrell III and C Ganesh ldquoGeneralized Chernoff Fusionapproximation for practical distributed data fusionrdquo in Proceed-ings of the 12th International Conference on Information Fusion(FUSION rsquo09) pp 555ndash562 July 2009
[56] A R Benaskeur ldquoConsistent fusion of correlated data sourcesrdquoin Proceedings of the 28th IEEE Annual Conference of theIndustrial Electronics Society (IECON rsquo02) vol 4 pp 2652ndash2656IEEE Seville Spain November 2002
[57] J Sijs and M Lazar ldquoState fusion with unknown correlationellipsoidal intersectionrdquo Automatica vol 48 no 8 pp 1874ndash1878 2012
[58] Z Deng P Zhang W Qi G Yuan and J Liu ldquoThe accuracycomparison of multisensor covariance intersection fuser andthree weighting fusersrdquo Information Fusion vol 14 no 2 pp177ndash185 2013
[59] J K Uhlmann ldquoCovariance consistency methods for fault-tolerant distributed data fusionrdquo Information Fusion vol 4 no3 pp 201ndash215 2003
[60] S J Julier and J K Uhlmann ldquoUsing covariance intersectionfor SLAMrdquo Robotics and Autonomous Systems vol 55 no 1 pp3ndash20 2007
[61] Q Guo S Chen H Leung and S Liu ldquoCovariance intersectionbased image fusion technique with application to pansharpen-ing in remote sensingrdquo Information Sciences vol 180 no 18 pp3434ndash3443 2010
[62] H Li F Nashashibi andM Yang ldquoSplit covariance intersectionfilter theory and its application to vehicle localizationrdquo IEEETransactions on Intelligent Transportation Systems vol 14 no 4pp 1860ndash1871 2013
[63] J K Uhlmann S J Julier B Kamgar-Parsi M O Lanzagortaand H-J S Shyu ldquoNASA Mars rover a testbed for evaluatingapplications of covariance intersectionrdquo in Unmanned GroundVehicle Technology vol 3693 of Proceedings of SPIE pp 140ndash149Orlando Fla USA April 1999
[64] J Hu L Xie and C Zhang ldquoDiffusion Kalman filteringbased on covariance intersectionrdquo IEEE Transactions on SignalProcessing vol 60 no 2 pp 891ndash902 2012
[65] M Reinhardt B Noack and U D Hanebeck ldquoClosed-formoptimization of covariance intersection for low-dimensionalmatricesrdquo in Proceedings of the 15th International Conferenceon Information Fusion (FUSION rsquo12) pp 1891ndash1896 SingaporeSeptember 2012
[66] R Carli A Chiuso L Schenato and S Zampieri ldquoDistributedKalman filtering based on consensus strategiesrdquo IEEE Journalon Selected Areas in Communications vol 26 no 4 pp 622ndash633 2008
[67] S S Stankovic M S Stankovic and D M Stipanovic ldquoCon-sensus based overlapping decentralized estimationwithmissingobservations and communication faultsrdquo Automatica vol 45no 6 pp 1397ndash1406 2009
[68] W Yu G Chen Z Wang andW Yang ldquoDistributed consensusfiltering in sensor networksrdquo IEEE Transactions on SystemsMan and Cybernetics Part B Cybernetics vol 39 no 6 pp1568ndash1577 2009
[69] M Farina G Ferrari-Trecate and R Scattolini ldquoDistributedmoving horizon estimation for linear constrained systemsrdquoIEEE Transactions on Automatic Control vol 55 no 11 pp2462ndash2475 2010
[70] H M La and W Sheng ldquoDistributed sensor fusion for scalarfield mapping using mobile sensor networksrdquo IEEE Transac-tions on Cybernetics vol 43 no 2 pp 766ndash778 2013
[71] S Zhu C Chen W Li B Yang and X Guan ldquoDistributedoptimal consensus filter for target tracking in heterogeneoussensor networksrdquo IEEE Transactions on Cybernetics vol 43 no6 pp 1963ndash1976 2013
[72] B Acikmese M Mandic and J L Speyer ldquoDecentralizedobservers with consensus filters for distributed discrete-timelinear systemsrdquo Automatica vol 50 no 4 pp 1037ndash1052 2014
[73] M Kamgarpour and C Tomlin ldquoConvergence properties of adecentralized Kalman filterrdquo in Proceedings of the 47th IEEEConference on Decision and Control (CDC rsquo08) pp 3205ndash3210IEEE Cancun Mexico December 2008
[74] W Li andY Jia ldquoConsensus-based distributed information filterfor a class of jump markov systemsrdquo IET Control Theory ampApplications vol 5 no 10 pp 1214ndash1222 2011
[75] W Li and Y Jia ldquoDistributed consensus filtering for discrete-time nonlinear systems with non-Gaussian noiserdquo Signal Pro-cessing vol 92 no 10 pp 2464ndash2470 2012
Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 11
[76] W Li and Y Jia ldquoConsensus-based distributed multiple modelukf for jump markov nonlinear systemsrdquo IEEE Transactions onAutomatic Control vol 57 no 1 pp 227ndash233 2012
[77] O Hlinka O Sluciak F Hlawatsch P M Djuric and M RuppldquoLikelihood consensus and its application to distributed particlefilteringrdquo IEEE Transactions on Signal Processing vol 60 no 8pp 4334ndash4349 2012
[78] T Lefebvre H Bruyninckx and J D Schutter ldquoComment onlsquoa new method for the nonlinear transformation of means andcovariances in filters and estimatorsrsquordquo IEEE Transactions onAutomatic Control vol 47 no 8 pp 1406ndash1409 2002
[79] G Battistelli L Chisci and C Fantacci ldquoParallel consensus onlikelihoods and priors for networked nonlinear filteringrdquo IEEESignal Processing Letters vol 21 no 7 pp 787ndash791 2014
[80] G Battistelli L Chisci C Fantacci A Graziano and AFarina ldquoConsensus-basedmultiple-model Bayesian filtering fordistributed trackingrdquo IET Radar Sonar amp Navigation vol 9 no4 pp 401ndash410 2015
[81] W Li GWei and F Han ldquoConsensus-based unscented Kalmanfilter for sensor networks with sensor saturationsrdquo in Proceed-ings of the International Conference onMechatronics and Control(ICMC rsquo14) pp 1220ndash1225 Jinzhou China July 2014
[82] ZWangDDingHDong andH Shu ldquo119867infinconsensus control
for multi-agent systems with missing measurements the finite-horizon caserdquo Systems amp Control Letters vol 62 no 10 pp 827ndash836 2013
[83] Y Zhao B Li J Qin H Gao and H R Karimi ldquo119867infinconsensus
and synchronization of nonlinear systems based on a novelfuzzy modelrdquo IEEE Transactions on Cybernetics vol 43 no 6pp 2157ndash2169 2013
[84] L Ding and G Guo ldquoDistributed event-triggered 119867infin
consen-sus filtering in sensor networksrdquo Signal Processing vol 108 pp365ndash375 2015
[85] V Ugrinovskii ldquoDistributed robust filtering with119867infinconsensus
of estimatesrdquo Automatica vol 47 no 1 pp 1ndash13 2011[86] V Ugrinovskii and C Langbort ldquoDistributed 119867
infinconsensus-
based estimation of uncertain systems via dissipativity theoryrdquoIET Control Theory amp Applications vol 5 no 12 pp 1458ndash14692011
[87] V Ugrinovskii ldquoDistributed robust estimation over randomlyswitching networks using 119867
infinconsensusrdquo Automatica vol 49
no 1 pp 160ndash168 2013[88] V Ugrinovskii ldquoGain-scheduled synchronization of parameter
varying systems via relative 119867infin
consensus with application tosynchronization of uncertain bilinear systemsrdquoAutomatica vol50 no 11 pp 2880ndash2887 2014
[89] B Shen Z Wang J Liang and Y Liu ldquoRecent advances onfiltering and control for nonlinear stochastic complex systemswith incomplete information a surveyrdquoMathematical Problemsin Engineering vol 2012 Article ID 530759 16 pages 2012
[90] A Chiuso and L Schenato ldquoInformation fusion strategies andperformance bounds in packet-drop networksrdquo Automaticavol 47 no 7 pp 1304ndash1316 2011
[91] B Chen L Yu W-A Zhang and A Liu ldquoRobust informationfusion estimator for multiple delay-tolerant sensors with differ-ent failure ratesrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 60 no 2 pp 401ndash414 2013
[92] B ChenW-A Zhang and L Yu ldquoDistributed fusion estimationwith missing measurements random transmission delays andpacket dropoutsrdquo IEEE Transactions on Automatic Control vol59 no 7 pp 1961ndash1967 2014
[93] B Chen W Zhang L Yu G Hu and H Song ldquoDistributedfusion estimation with communication bandwidth constraintsrdquoIEEETransactions onAutomatic Control vol 60 no 5 pp 1398ndash1403 2015
[94] G Battistelli L Chisci G Mugnai A Farina and A GrazianoldquoConsensus-based algorithms for distributed filteringrdquo in Pro-ceedings of the 51st IEEE Conference on Decision and Control(CDC rsquo12) pp 794ndash799 Maui Hawaii USA December 2012
[95] G Battistelli and L Chisci ldquoStability of consensus extendedKalman filtering for distributed state estimationrdquo in Proceedingsof the 19th IFAC World Congress pp 5520ndash5525 Cape TownSouth Africa August 2014
[96] A Garulli and A Giannitrapani ldquoAnalysis of consensus pro-tocols with bounded measurement errorsrdquo Systems amp ControlLetters vol 60 no 1 pp 44ndash52 2011
[97] W Li GWei F Han and Y Liu ldquoWeighted average consensus-based unscented Kalman filteringrdquo IEEE Transactions on Cyber-netics 2015
[98] F Han G Wei Y Song andW Li ldquoDistributed119867infin-consensus
filtering for piecewise discrete-time linear systemsrdquo Journal ofthe Franklin Institute vol 352 no 5 pp 2029ndash2046 2015
[99] W Li Y Jia and J Du ldquoDistributed Kalman consensus filterwith intermittent observationsrdquo Journal of the Franklin Institutevol 352 no 9 pp 3764ndash3781 2015
[100] G Wei Z Wang and H Shu ldquoRobust filtering with stochasticnonlinearities and multiple missing measurementsrdquo Automat-ica vol 45 no 3 pp 836ndash841 2009
[101] F Yang Z Wang and Y S Hung ldquoRobust Kalman filteringfor discrete time-varying uncertain systems with multiplicativenoisesrdquo IEEE Transactions on Automatic Control vol 47 no 7pp 1179ndash1183 2002
[102] Z Dong and Z You ldquoFinite-horizon robust Kalman filteringfor uncertain discrete time-varying systems with uncertain-covariance white noisesrdquo IEEE Signal Processing Letters vol 13no 8 pp 493ndash496 2006
[103] G-H Yang and J L Wang ldquoRobust nonfragile Kalman filteringfor uncertain linear systems with estimator gain uncertaintyrdquoIEEE Transactions on Automatic Control vol 46 no 2 pp 343ndash348 2001
[104] E E Yaz and Y I Yaz ldquoState estimation of uncertain nonlinearstochastic systems with general criteriardquo Applied MathematicsLetters vol 14 no 5 pp 605ndash610 2001
[105] J Hu Z Wang H Gao and L K Stergioulas ldquoExtendedKalman filtering with stochastic nonlinearities and multiplemissing measurementsrdquo Automatica vol 48 no 9 pp 2007ndash2015 2012
[106] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[107] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[108] M B Rhudy and Y Gu ldquoOnline stochastic convergence analysisof the Kalman filterrdquo International Journal of Stochastic Analysisvol 2013 Article ID 240295 9 pages 2013
[109] K Reif S Gunther E Yaz and R Unbehauen ldquoStochasticstability of the discrete-time extended Kalman filterrdquo IEEETransactions on Automatic Control vol 44 no 4 pp 714ndash7281999
12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Discrete Dynamics in Nature and Society
[110] K Xiong H Y Zhang and C W Chan ldquoPerformance evalua-tion of UKF-based nonlinear filteringrdquo Automatica vol 42 no2 pp 261ndash270 2006
[111] S Wang J Feng and C K Tse ldquoA class of stable square-rootnonlinear information filtersrdquo IEEE Transactions on AutomaticControl vol 59 no 7 pp 1893ndash1898 2014
[112] L Li and Y Xia ldquoStochastic stability of the unscented Kalmanfilter with intermittent observationsrdquoAutomatica vol 48 no 5pp 978ndash981 2012
[113] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[114] DDing ZWang J Lam and B Shen ldquoFinite-horizon119867infincon-
trol for discrete time-varying systems with randomly occurringnonlinearities and fading measurementsrdquo IEEE Transactions onAutomatic Control vol 60 no 9 pp 2488ndash2493 2015
[115] D Ding Z Wang B Shen and H Dong ldquoEnvelope-constrained 119867
infinfiltering with fading measurements and ran-
domly occurring nonlinearities the finite horizon caserdquo Auto-matica vol 55 pp 37ndash45 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of



























