Embed Size (px)
Citation preview

Retrieval and validation of mixing layer height with LIDAR ceilometer
Q. Laffineur1, H. De Backer1, O. Brasseur21. Royal Meteorological Institute of Belgium, RMI
2. Belgian Interregional Environment Agency, IRCEL-CELINE
IntroductionIn May 2011, RMI installed a LIDAR ceil-ometer (LIght Detection And Ranging) at Uccle that offer the oppo-rtunity to monitor the vertical profile of aer-osols and the mixing layer height (MLH) on a continuous temporal sc-ale.
What is the MLH?
Height of the layer adjacent to the ground over which pollutants or any constituents emitted within this layer or entrained into it become vertically dispersed by convection or mechanical turbulence within a time scale of about an hour (Seibert et al., 1998).
Why measure the MLH?
The direct observation of MLH can improve notably the forecasting of the dispersion of trace gases and aerosols in the first layers of the atmosphere.
The goal of RMI is to make the LIDAR ceilometer measurements accessible in real-time for its weather forecast office, and for other interested people (e.g. monitoring the air quality in Belgium and people responsible of the air traffic safety).
Operating principle of LIDAR ➔ Short pulse of LASER
light (910 nm) is transmitted into air
➔ Receiver monitors the light backscattered by aerosols and clouds
➔ Altitude of backscatterer is given by time (speed of light is 30 cm/ns)
➔ Several profiles are summed to increase signal to noise ratio
13.3 µs0.4 km
23.3 µs 0.7 km
Total travel of light: 1.4 km
Total travel of light: 0.8 km
Backscatter signal
➔ Vertical resolution: 10 m
➔ Horizontal resolut-ion: 6 s
Fig. 1 The LIDAR ceilometer (Vaisala CL51) at Uccle
Fig. 2 Schematic representation of the operating principle of LIDAR
Stable (nocturnal) boundary layer
Convectivemixed layer
Residual layers
Fig. 3 Example of one day of LIDAR measurement at Uccle between 120 and 3000 m (asl)
First algorithm (▲) Second algorithm (▲)
MLH retrieval algorithm
●The MLH is determined as the level at which is located in a 30 min time frame the maximum number of ▲ accompanied by ▲, within a bandwidth of 165 m.
●An average (●) of MLH (▲, ▲) is computed each half-hour.
+
Gradient
Th
resh
old
Sig
nal
/No
ise
< 1
.0
Sig
nal/N
oise
< 1.0
Variance
=
- Based on the detection of the significant vertical grad-ient in the ba-ckscatter pro-files.
- Based on the detection of the maximum temporal vari-ance (5 min) in the backsc-atter profiles.
●The vertical domain on which the algorithm is applied is constrained by the signal to noise ratio level (SNR<1), but also by the minimum values of first cloud base or by fog, precipitation...
Validation & evolution of MLHValidation
Tab. 1 General evaluation between MLH deduced by LIDAR and MLH deduced by other methods
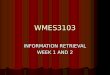
●Majority of differences is < 0.4 km●Great difference may occur under:
-strong convective conditions-strong wind conditions-when aerosol concentrations are too
low
Fig. 4 Box plot of the difference between MLH deduced by LIDAR and MLH deduced by radio-sounding (about 12 each month around 11:30) for each month.
Month (2011) May June July August Sept. Oct. Nov. Dec.MLH algorithm
detection performance70 % 57 % 49 % 55 % 59 % 61 % 65 % 37 %
MLH: Rich. MLH: ECM MLH: RS
DAY + + +NIGHT - -
Evolution
●Considering the period from May 2011 to January 2012, the annual cycle of the MLH was lowest in November and highest in May-June.●Mean MLH diurnal cycle was asymmetric: increased slowly during the mor-ning, reached a maximum around 15h00, before decreasing rapidly at the end of the day. ●A second maximum was present around 18h00, due to the inability of the al-gorithm to discern the initiation of the residual layer formation and the mix-ing layer.
Fig. 5 Monthly mean diurnal cycle of MLH, based on the algorithm applied on LIDAR data (■),based on the Richardson number method applied on ECMWF pseudo-sounding (●), based on the direct MLH output of ECMWF (▲). Error bars represent the confidence intervals (95%) of the mean of MLH.
Conclusions●The estimation of MLH based on radio-sounding (observation) and on pseudo-sounding (modelling) validated the MLH measurements. ●The LIDAR ceilometer is capable to assess and monitor the MLH especially under clear sky conditions.●
METEOCLIM 2012, ULG, Liège, 1 June 2012
Reference:Seibert, P. et al.: Mixing height determination for dispersion modelling, Report of Working Group 2, in: Harmonization in the Preprocessing of meteorological data for atmospheric dispersion models, COST Action 710, CEC Publication EUR 18195, pp. 145–265, 1998.
The Solar-Terrestrial Centre of Excellence