Embed Size (px)
Citation preview

Responsive Polymer Brushes
SERGIY MINKO
Department of Chemistry and Biomolecular Science, Clarkson University,
Potsdam, NY, USA
The review focuses on responsive/switching behavior of polymer brushes. Thestructure of the polymer brushes is analyzed in terms of the constitution and confor-mation of polymer chains. Responsive properties are widely discussed based onphase transition mechanisms in a controlled environment when changes are inducedby solvent quality, temperature, concentration of ions, and interactions with liquidsand solids. Potential applications of polymer brushes are also discussed.
Keywords response, grafted layers, phase transition, interactions, applications
Introduction
A polymer brush1 – 4 consists of end-tethered (grafted, anchored) polymer chains stretched
away from the substrate so that in the given solvent the brush height (h) is larger as
compared to the end-to-end distance (kr2l1/2) of the same non-grafted chains dissolved
in the same solvent. In polymer brushes the distance between grafting points (d ) is
smaller than the chain end-to-end distance. Polymer brushes can be introduced as
thin films of end-grafted polymer molecules when the following conditions are
satisfied: h . kr2l1/2, d , kr2l1/2. Outside these conditions the grafted layers are in the
“mushroom regime”.
The chains can be grafted to different substrates that may result in planar brushes
(Fig. 1) for planar or “reasonably flat” substrates (root mean square roughness should be
much smaller than end-to-end distance of grafted polymer chains), cylindrical brushes
(Fig. 2) for fiber- or rod-like substrates (the substrate in this cases can be as small in
radius R as a polymer chain backbone. In this case the brushes are called “molecular
brushes”), and spherical brushes for substrates of spherical shape (Fig. 3). For the cylind-
rical and spherical brushes two different regimes can be selected: (1) h . R and (2) h , R
(R is the radius of curvature of the grafting surface). The substrates can be in any physical
state: solid, liquid, or gas (for example foams stabilized by an amphiphilic block-
copolymer). The grafting points may diffuse laterally on the substrate surface. The
grafting can be realized through covalent bonds, electrostatic interactions, hydrogen
bonds, or strong van der Waals interactions. However, weak interactions are less interest-
ing. The elastic energy component accumulated in the polymer brush due to the stretching
may destroy weak bonds. Soft substrates may be deformed by the brush.5
Received 14 March 2006; Accepted 31 May 2006.Address correspondence to Sergiy Minko, Department of Chemistry and Biomolecular Science,
Clarkson University, 8 Clarkson Ave, Potsdam, NY 13699, USA. E-mail: [email protected]
Journal of Macromolecular Sciencew, Part C: Polymer Reviews, 46:397–420, 2006
Copyright # Taylor & Francis Group, LLC
ISSN 1558-3724 print/1558-3716 online
DOI: 10.1080/15583720600945402
397

Responsiveness of polymer brushes to external stimuli refer to changes of polymer
molecule conformations.6 Most research reports on responses affected by changes of
macroconformations in solutions and melts when the segmental mobility is reasonably
high. The conformational changes in specially tailored polymer brush systems are used
in materials and devices to approach demanded effects of switching material properties
upon external signals. Theory predicts very large potential to regulate and tune complex
interactions between brush-coated surfaces.7
It is noteworthy that polymer brushes represent well-defined grafted polymer chain
architecture when the structure (end-grafted chains) is not very complex as compared to
other grafted polymer layers (randomly grafted chains, LBL thin polymer films, grafted
composite/hybrid films, etc). Polymer brushes can be analyzed theoretically more easily.
Interpretations of the experimental study of polymer brushes are based on the well-
developed theoretical background that facilitates intensive investigations of these responsive
systems. The exponential increase of the number of publications on polymer brushes (around
400 papers in 2005 vs. 150 in 2000 and 70 in 1995) is good evidence for that.
Responsiveness in Polymer Systems
As in any polymer system, polymer brushes respond to their environment by a change of
the polymer chain conformations. The size of polymer chains is sensitive to its
Figure 1. Planar homopolymer brush: a homogeneous smooth layer of stretched chains in good
solvent (a), pinned micelles (b) and a layer of collapsed chains (c) in poor solvent.
Figure 2. Cylindrical brushes and their responsive conformational changes: bending, contraction,
compacting, and coiling. (Reproduced from Ref. 50, Copyright 2006, with permission from Black-
well Publishing).
S. Minko398

environment. In Q solvents (attraction and repulsion are compensated) isolated
polymer chains of the degree of polymerization N possess ideal coil conformation when
kr2l1/2 � N1/2. The size of the isolated chain is a function of solvent quality (that may
be expressed in terms of the x-Flory-Huggins interaction parameter or Q-
temperature). In a good solvent the extended chains have self-avoiding coil statistics:
kr2l1/2 � N0.588. The isolated chain in a poor solvent collapses into a globule:
kr2l1/2 � N1/3. In good solvents and at high polymer concentrations the excluded
volume effect modifies chain conformations substantially. In semi-diluted polymer
solutions the chain size decreases with the 1/8th power of the polymer volume fraction
in a good solvent. In theta solvents the polymer chain size is concentration independent.
In poor solvents bulk polymer solutions undergo a phase separation into two phases:
almost pure solvent and concentrated polymer solution of overlapping Gaussian coils.
Both the scaling exponent and the prefactor are sensitive to solvent quality.
Constraints due to the end grafting of the polymer chains introduce a specific character
of the response which is somewhat different from the response of isolated chains in solution
or melt.8 In the crowded grafted layers (polymer brushes) the chains stretch out of the
grafting surface until the excluded volume effect is compensated by elastic energy (stretching
entropy) of polymer coils. Polymer brushes expand in good solvents and collapse in poor
Figure 3. Spherical brushes: collapsed and stretched chains of a homopolymer brush in poor and
good solvents, respectively (a); polyelectrolyte (PEL) brush swells when ionizable groups dissociate
in a polar solvent (b); depending on solvent selectivity a mixed two-component brush switches
between the state when chains of the polymer A are stretched and chains of the polymer B are
collapsed (left) and the state when the chains of the polymer B are stretched and the chains of the
polymer A are collapsed (right) (c).
Responsive Polymer Brushes 399

solvents. The change of characteristic size between good and poor solvents is much
larger for polymer brushes as compared to the polymer chain in solution. For some
applications it is important that the grafting points cannot diffuse laterally.
The specific goal of this review is to analyze responsive brushes. There is not an
obvious definition which changes of polymer brush properties should be recognized as a
responsive behavior. Any material is responsive since changes of its environment always
cause some changes of material properties. The term “responsive behavior” is rather a
term which reflects applications, and consequently, there is no universal definition of
responsiveness. For many applications we suppose to obtain a steep and well noticeable
change (switching) of the given property, thus, transitions from the state which can be
characterized by some property to the state with the contra property. For example, we
may mention the transitions from wetting to non wetting, from swollen to collapsed
brush, from adhesive to non adhesive, from adsorbing to non adsorbing, from attractive
to repulsive, etc. Typically (but not necessarily), such changes of properties are
accompanied by phase transitions in polymeric systems. These transitions are assigned as
responsive properties of polymer brushes. For some applications even a small change of
brush properties may have a dramatic effect. This change may be also assigned as a respon-
sive property of the brush. Consequently, we may agree that the response of polymer
brushes is a noticeable effect for the given application of the brush if this effect appears
as a change of the brush properties introduced by a change of the brush environment.
Mechanisms of Responses
Homopolymer Brushes
In scaling theory and self-consistent field theory8,9 the thickness of the polymer brush is
linearly proportional to N: h � N (but not obviously in a bad solvent). Experiments
proved that this relationship retains unchanged for solvents of different quality.10
However, the prefactor depends on solvent quality and grafting density of polymer
chains. Besides the chain constitution, the grafting density is the parameter which
affects conformational responsiveness of polymer brushes. At small grafting densities
(so called mushroom regime) the response of grafted chains is very similar to that of
the bulk polymer solution.8,9 At high grafting densities the collapse is weak and the
brush forms a homogeneous layer which is slightly thinner in a poor solvent than in a
good solvent or in the Q regime. That is because of the very crowded layer of strongly
stretched polymer chains when there is no free space for conformational changes. In the
grafting density regime which lays between very low and high surface coverage
regimes the brushes are unstable in poor solvents and form clusters (pinned micelles)
on the surface (Fig. 1b) to avoid unfavorable interactions with the poor solvents.11,12 In
a good solvent the brush is swollen and it forms a homogeneous layer of stretched
tethered chains (Fig. 1a). In this grafting density regime (cross-over regime) the
polymer brush demonstrates the most pronounced response to solvent quality as it is
obvious from the graph in Fig. 4.13 Thus, we may conclude that the largest conformational
response in a polymer brush is in the very beginning of the brush regime when chains start
to overlap. Switching a range of the thin polymer film properties relevant to density and
thickness of the film can be easily approached with the brushes of moderate grafting
densities. It is noteworthy, that the optimal grafting density may be affected by a concen-
tration dependency of x-parameter for some polymer-solvent systems. For example, the
high responsiveness (collapse in water above a lower critical solution temperature
S. Minko400
308C) was reported for 0.25 nm22 dense poly(N-isopropylacrylamide) (PNIPAM)
brushes,14 while for one order less dense brushes no collapse was detected.15
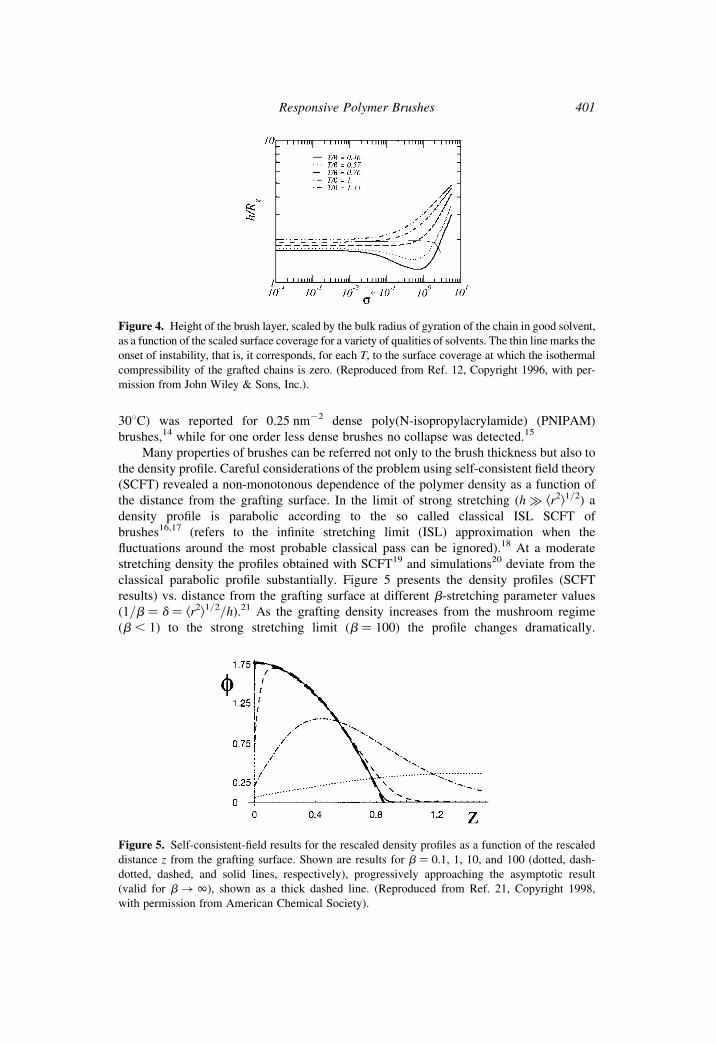
Many properties of brushes can be referred not only to the brush thickness but also to
the density profile. Careful considerations of the problem using self-consistent field theory
(SCFT) revealed a non-monotonous dependence of the polymer density as a function of
the distance from the grafting surface. In the limit of strong stretching (h� kr2l1/2) a
density profile is parabolic according to the so called classical ISL SCFT of
brushes16,17 (refers to the infinite stretching limit (ISL) approximation when the
fluctuations around the most probable classical pass can be ignored).18 At a moderate
stretching density the profiles obtained with SCFT19 and simulations20 deviate from the
classical parabolic profile substantially. Figure 5 presents the density profiles (SCFT
results) vs. distance from the grafting surface at different b-stretching parameter values
(1/b ¼ d ¼ kr2l1/2/h).21 As the grafting density increases from the mushroom regime
(b , 1) to the strong stretching limit (b ¼ 100) the profile changes dramatically.
Figure 4. Height of the brush layer, scaled by the bulk radius of gyration of the chain in good solvent,
as a function of the scaled surface coverage for a variety of qualities of solvents. The thin line marks the
onset of instability, that is, it corresponds, for each T, to the surface coverage at which the isothermal
compressibility of the grafted chains is zero. (Reproduced from Ref. 12, Copyright 1996, with per-
mission from John Wiley & Sons, Inc.).
Figure 5. Self-consistent-field results for the rescaled density profiles as a function of the rescaled
distance z from the grafting surface. Shown are results for b ¼ 0.1, 1, 10, and 100 (dotted, dash-
dotted, dashed, and solid lines, respectively), progressively approaching the asymptotic result
(valid for b! 1), shown as a thick dashed line. (Reproduced from Ref. 21, Copyright 1998,
with permission from American Chemical Society).
Responsive Polymer Brushes 401

The impenetrable grafting surface causes a decrease of the polymer density close to the
grafting surface when the grafting density maximum is located in some distance from
the grafting surface. This distance increases as the grafting density decreases. The
grafting density profile is much more sensitive to the brush characteristic at moderate
grafting densities as compared to a very high stretching regime.
Concluding this paragraph, both brush thickness and density profile are sensitive to
grafting density and solvent quality. The responsive behavior of the homopolymer
brush is referred to changes of free energy of the brush in its environment due to the
change of solvent quality. Any application of the responsive homopolymer brushes will
be grounded on this principle.
Polyelectrolyte (PEL) Brushes (Fig. 6)
Macromolecules with ionizable groups carry electrical charges in polar solvents. PEL in
aqueous solutions attract great interest because of their relevance to many biological
systems. Interactions which involve charged macromolecules are strongly modified by
Coulomb forces. The charge density on a polymer chain in a polar solvent depends on
the chain constitution and degree of dissociation ( f ) of ionizable groups. If ionizable
groups are strong acids or bases (strong PE) f is equal to 1 and is not affected by the
environment. If ionizable groups are weak acids or bases (weak PEL) f depends on
local pH. For the latter case charges are mobile within the polymer chain.
For the dense strong PEL brush (high f and grafting density) all counterions are trapped
inside the brush (Fig. 6b). The brush height is determined by the balance between osmotic
Figure 6. Planar polyelectrolyte (PEL) brush with ionizable groups (a) swells when the groups
dissociate a polar solvent (b); the dissociation is pH dependent for weak polyelectrolytes (c);
addition of salt leads to the shrinkage of the PEL brush (d).
S. Minko402

pressure of the trapped counter-ions and the stretching entropy of the chains (so called
osmotic brush regime). The contribution of the excluded volume effect depends on the
grafting density. At very high densities the excluded volume effect may dominate while
at moderate densities the electrostatic nature will have a major contribution. The latter
will be reflected in the prefactor in the scaling relationship h � N. These brushes are insen-
sitive to local pH. Added salt does not affect the brush unless the ionic strength of
the solution approaches the level of the ionic strength inside the brush (Fig. 6d). In that
case the prefactor is an inverse cubic root function of the external salt concentration and
the grafting density (so called salted brush regime).22,23 Thus, in terms of responsive appli-
cations strong PEL are interesting for design of responsiveness to humid and aqueous
environments when the high swelling of the brush in water or a humid atmosphere is
resulted from strong osmotic pressure of trapped counterions (Fig. 6 a,b).
Weak PEL brushes represent one of the most interesting responsive behaviors. They
demonstrate responsiveness to changes in external pH and ionic strength. Weak PEL
brushes carrying basic functionalities expand upon a decrease of pH, while acidic PEL
brushes expand upon an increase of pH (Fig. 6 c,d). At a high salt concentration weak
PEL brushes shrink due to the same mechanism as strong PEL brushes. However, it is
noteworthy, that in some range of pH values they shrink also at no salt added or at very
small salt concentrations, thus, expressing non-monotonous dependence of the brush
height vs. salt concentration. This behavior originates from the sensitivity of f for weak
PEL(s) to the local electric field.24 At a low ionic strength electrostatic interactions
result in the condensation of counterions in the brush (the neutral polymer brush
regime). If ionic strength is increased the screening of the electrostatic interactions
affects an increase of f and brings the system in the osmotic regime. The graph of the
brush thickness vs. salt concentration has a maximum.25
In mixed brushes (Fig. 7) two or more different polymers grafted to the same substrate
constitutes the brush. The mechanism of responsiveness of the mixed brushes is very
different from homopolymer brushes. Unlike polymers in the mixed brush segregate
into nanoscopic phases. The size of the nanophases scales with kr2l1/2 value. The phase
Figure 7. Mixed two-component brush: lateral phase segregation of chains in non-selective solvent
(a), and combined lateral and layered segregation in a selective solvent (b, c).
Responsive Polymer Brushes 403

segregation is a lateral segregation in a nonselective solvent when unlike polymers form
spherical or elongated clusters. Both the polymers are exposed on the top of the brush
(Fig. 7a). In selective solvents the mixed brush structure may be seen as a combination
of lateral and layered segregation mechanisms.26 In the latter case one polymer preferen-
tially segregates to the top of the brush, while another polymer forms clusters segregated to
the grafting surface (Fig. 7b, c). The most important difference of the mixed brush
as compared to the homopolymer brush is that not only the height and density profile
but also the composition profile depends on solvent quality. In other words, the surface
composition of the brush is switched by a change in its environment.
If two unlike polymers are of the same chemical constitution but they differ by
molecular weight the brush stratifies.27 – 29 The polymer of the largest molecular weight
will occupy the top of the brush. If two unlike polymers are of different chemical
compositions the lateral and layered segregation takes place. A combination of both
kinds of heterogeneity (by chemical composition and molecular weight) results in the
more complex phase diagram when the whole range of parameters of the system can be
used to design the brush responsiveness.30 The further modification of the responsiveness
can be obtained for mixed PEL brushes (Fig. 8). In this case electrostatic interactions are
used to regulate the mechanism of the phase segregation. Weak mixed PEL brushes are of
special interest. At isoelectric points they form a neutral PEL complex (Fig. 8a), while
outside the isolectric point one PEL dominates in the topmost layer and affects the elec-
trical charge of the brush (Fig. 8 b, c). Thus, the surface composition of the mixed PEL
brush can be switched just by a change of external pH.31 – 33
Block-Copolymer Brushes (Fig. 9)
In this case two or more chemically different polymers constitute a polymer brush
with block-copolymer architecture. The responsiveness of these brushes is determined
Figure 8. Mixed weak polyelectrolyte brush forms a neutral complex in the isoelectric point (a); in
acidic or basic solutions positively or negatively charged polymers, respectively, are stretched while
a counterpart chains are collapsed and segregated to the grafting surface (b, c).
S. Minko404

by phase segregation of unlike polymers, however, the mechanism depends on whether the
AB block copolymer is tethered by the more (A) or the less (B) soluble block.34,35 In poor
solvents the brushes grafted by the B blocks form dumbbell-like micelles with the
B-polymer segregated to the grafting surface and the A-polymer micelles on the top
(Fig. 9b). The brushes grafted by the A blocks form B-polymer micelles shielded by
A-polymers (Fig. 9a).
If the solvent quality is improved (increased selectivity of solvent) for the A-polymers
the dumbbell-like micelles of the B-grafted brushes are transformed to the structures which
are similar to the mixed brushes in selective solvents. The B-polymers form pinned micelles
segregated to the grafted surfaces and shielded by the brush of the A-polymers. In general,
the block-copolymer brushes have a complex phase diagram affected by the ratio between
the molecular weights of the A and B blocks and the grafting density. The major difference
between mixed and block-copolymer brushes can be found for the case of the A-grafted
brushes in a selective solvent for the A-blocks. The mixed brushes of the A and B
polymers form pinned B-micelles segregated to the grafting surface. The AB block-
copolymer brushes form B-micelles located at the top of the brush (Fig. 9a). Consequently,
block-copolymer brushes introduce unique mechanisms of the phase segregation.
The experimental studies36 – 39 have demonstrated reach responsive behavior of block-
copolymer brushes based on the rearrangement of segregated phases in good agreement
with theoretical predictions. PEL block-copolymer brushes are less investigated. The
A-B PEL block-copolymer brushes grafted by the neutral blocks A demonstrated no
rearrangement upon treatment by different solvents.40 However, it seems to be a
specific case of the brush structure. Generally, electrostatic interaction can modify inter-
actions in the block copolymer brushes resulting in additional responsive mechanisms that
could be a subject of future investigations.
Figure 9. The block-copolymer brush constituted of more soluble A blocks and less soluble
B blocks. The brushes grafted by the A-blocks (a) form B-polymer micelles shielded by the
A-polymers (a, right). In good solvent for the A-polymers B-micelles are located at the top of the
brush (a, left). The brushes grafted by the B-polymers (b) form dumbbell-like micelles (b, right).
In good solvent for the A-polymers the A-blocks are stretched and the B-blocks form micelles
segregated to the grafting surface (b, left).
Responsive Polymer Brushes 405

Non-Planar Brushes
In many important applications the grafting surface is curved. Most brush applications
are for colloidal objects of spherical and cylindrical shapes. The traditional application
of the brushes against flocculation of colloidal particles is well known.41 However,
responsive brushes for colloidal systems are considered to be an under-investigated
field which promises numerous exciting applications for a new generation of functional
materials: smart coatings and detergents, drug delivery systems, smart containers for
biomolecules, elements of miniaturized sensors, etc. for textiles, paints, cosmetics,
microscopic devices, medicine, and biotechnology. A curved grafting surface may
strongly modify properties of the brushes. First of all, the volume available for the
grafted chains is a function of distance from the grafting surface (z) and changes with
curvature (Fig. 10) In terms of theoretical analysis the boundary conditions imposed
by curved grafting surfaces are different than those for a planar grafting surface.13 It
seems that these “difficulties” have postponed intensive studies in the area of non-
planar polymer brushes, although industrial needs and published research reports give
well- justified prospects for success.25,42 – 45 Fabrication of mixed brushes on the
curved surfaces46 – 48 sounds very promising for the design of a range of various inter-
action mechanisms in colloidal systems.49
Molecular Brushes
Molecular brushes are of special interest because they represent a tailored responsiveness
on the level of single molecule events.50 Brush-like molecules are formed by grafting
polymer arms to a molecular (polymer) backbone. They change conformations in
response to their environment. Changes of solvent quality induce switching between
rodlike and globule conformations. The basic mechanism of responsiveness is the same
as for planar brushes: solvent quality and entropic elasticity balance the conformation.
The flexible backbone also contributes to the balance and in turn changes its conformation.
Figure 10. Density profiles for chains tethered at spherical surfaces for a variety of radii R. z is the
radial distance from the tethered surface. The full line with filled circles is for a planar film, dot-
dashed line R ¼ 100l, long dashed line R ¼ 20l, dashed line R ¼ 10l, dotted line R ¼ 5l, and a
full line R ¼ 2l, where l is the bond length of a chain. (Reproduced from Ref. 13, Copyright
1996, with permission from John Wiley & Sons, Inc.)
S. Minko406

Thus, the cylindrical brushes change length and stiffness with changes in solvent quality. If
the polymer arms shrink in a poor solvent the cylindrical brush undergoes rod-to-globule
phase transition.51 Adsorbed brush-like molecules undergo conformational transitions
strongly modified by interactions with the solid substrate52 (Fig. 2).
Hierarchically Structured Brushes
These brushes are a combination of different architectures. Discovery and manufacturing
of complex brush architectures appear in response to the demand of the development of
hybrid functional nanomaterials with a complex response mimicking interactions in life
systems. To assemble nanoscale building blocks into responsive hierarchical nanostruc-
tures, new synthetic techniques are developing that are capable of linking a wide range
of length and response-time scales. An important challenge is to precisely manipulate
and quantify the response (switching) of a given property in the material based on
external stimuli. Multiple levels of functionality can be integrated into complex brushes
by carefully designing their architecture.
Recent research attempts to combine several architectural approaches in polymer
brushes. Y-shaped amphiphilic brushes combine two dissimilar polymer chains attached
to a single focal point or a leg. These brushes represent the first step to a more complex
architecture (Fig. 11).53,54 Although the responsive behavior of mixed and Y-shaped
brushes can be explained by very similar mechanisms, the difference between randomly
mixed polymer brushes and Y-shaped brushes is in the polymer distribution on the
surface. Incompatibility between two unlike polymers may affect the distribution
between grafting points for mixed brushes and for Y-shaped brushes differently. The
Y-shaped brushes could potentially form more regular structures because the grafting
of two different polymers is always coupled due to the Y-shaped architecture. This
morphology may be promising for the precise design of complex interactions.
Tightly grafted to the planar solid substrate spherical,47 cylindrical brushes (bottle-
brush brushes),55 or hyperbranched polymers56 represent new hierarchically structured
brush architectures.
Figure 11. Molecular graphics representation of the proposed structural rearrangements in
the Y-shaped brushes. (a) Internally segregated pinned micelle composed of seven grafted
polystyrene — poly(acrylic acid) (PS-PAA) molecules spaced 3.5-nm apart. Upon treatment
with toluene and subsequent drying, the PS arms (gray) form a corona covering the micelle’s
core consisting of seven PAA (dark gray) arms. (b) Representation of the same seven molecules
swelled in a nonselective solvent (light gray). (c) Top-open craterlike structure containing seven
collapsed PS arms partially covered by seven PAA chains. (Reproduced from Ref. 54, Copyright
2003, with permission from American Chemical Society).
Responsive Polymer Brushes 407

Reversibly Self-Assembled Brushes
These brushes are formed
(1) if polymer arms are tethered to the grafting surface via non-covalent bonds and
(2) if a grafted interface is formed just as a result of self-assembling of polymer chains.
Examples of these brushes encounter but are not limited to: end adsorbed polymer
chains, adsorbed block-copolymer layers, thin block-copolymer films, block-copolymer
micelles and vesicles, lipid-bilayers and vesicles, etc. These brushes demonstrate at
least three levels of responsiveness if assembling forces are strong enough to sustain
conformational changes of the polymer arms. The first level is the same as for
“classical” planar polymer brushes: balance between entropic spring and excluded
volume effect. The second level evolves bending of the grafting surface similar to
cylindrical brushes. Finally, the third level of response is an entire reorganization of the
structure when the brush may completely rearrange the supra-structure: for example the
transitions between micelles and vesicles of different shapes,57,58 and the inversion of
block-copolymer micelles.59,60 These structures possess a very complex response. Self-
assembled structures of amphiphilic molecules share many characteristics with brushes.
These systems are the building blocks of synthetic membranes (e.g. polymersomes61) or
cell membranes that are found in many living systems resulting in them being one of
the major targets of modern synthetic polymer chemistry.
Synthesis
Synthesis of polymer brushes of various structures was thoroughly introduced and
described in several reviews4,6,23 and in the book on polymer brushes.2 Thus, only the
major concepts are listed in this paragraph.
Three well known approaches are broadly used for synthesis of polymer brushes:
“grafting from,” “grafting to,” and “grafting through.” The major advantage of the
“grafting from” approach is that the tightly tethered chains may be grown from the
grafting surfaces. The active end-centers of the growing chains are easily accessible for
monomer units when small monomers swell the brush. Thus, the highest grafting
density can be approached with the “grafting from” approach. Although, almost all
possible polymerization mechanisms were employed to grow tethered chains from
different substrates, the most popular mechanisms (by number of publications) are
classical and controlled radical polymerizations. The controlled radical polymerization
seems to be the most technically simple method. However, the “grafting from”
approach is a synthesis of the polymer at a high local concentration of polymer chains.
In these conditions side reactions (chain transfer to polymer) should be considered as
a source of defective molecules. This problem seems to be underinvestigated yet. An
important step of the “grafting from” approach is surface immobilization of the initiator
of the polymerization. In the “grafting to” approach end-functionalized polymer chains
are grafted directly to a solid substrate via a chemical reaction of the end-groups with com-
plimentary groups on the grafting surface. In this case the functionalization of the grafting
surface is an important step. The “grafting to” approach is limited by diffusion kinetics of
end-functionalized polymer chains through the crowed grafted brush-like layer. The
brushes of a moderate grafting density can be obtained by the “grafting to” methods.
Nevertheless, the major conformational response of the brushes was indeed observed
for the brushes with moderate grafting densities. Thus, the “grafting to” is considered
S. Minko408

by the author of this review as the best method for the fabrication of responsive brushes for
many applications because of two major advantages:
(1) the grafted polymer can be thoroughly synthesized and characterized by traditional
methods in solutions, many commercially available polymers can be used,
(2) the “grafting to” procedure is very simple technically.
The “grafting through” approach is the polymerization of macromonomers. This
method is used for the fabrication of cylindrical brushes.
Two new tendencies have appeared in the field of synthesis of responsive brushes:
patterned surfaces and combinatorial approach.
Surfaces which are patterned on the nano- and microscale with responsive polymer
brushes can be used in sensing and actuation devices. These applications have stimulated
the development of synthetic approaches to nanopatterning of stimuli-responsive
brushes.62 Several methods were suggested for the fabrication of the patterned brushes.
The template methods refers to the fabrication of the patterns of an initiator on solid
substrates using photolithography63 or soft lithography methods.64 Alternative methods
explore scanning probe lithography: nanoshaving, anodization lithography, and dip-pen
lithography. In the nanoshaving approach a resist is mechanically removed by the AFM
tip and the obtained patterned are backfield with the initiator for the “grafting from”
process.65 AFM anodization lithography was used to generate silicon oxide nanopatterns
on silicon substrates by electrochemical anodic oxidation with the conductive AFM can-
tilever and using a resist layer on the surface of the silicon substrate. Local electrochemical
processes near the AFM tip results in the decomposition of the resist and generation of
silicon oxide patterns. The patterns are treated by the initiator for grafting polymer
brushes.62 Dip-pen lithography was used for direct patterning of the thiol initiator.66
Lift-off electron beam lithography was used to initially fabricate gold nanopatterns on
Si-wafers which later were surface modified with the initiator for “grafting from”
polymerization.67 The combination of the common lithography methods and surface-
initiated polymerization resulted in the development of the method for the fabrication
of 70 nm wide polymer brushes.
Responsive properties of brushes strongly depend on polymerization degree, grafting
density, and brush composition (for mixed and block-copolymer brushes). The precise
design of responsiveness can thus be approached by optimization of the brush structure.
This request was realized through the development of combinatorial methods to study
and optimize responsive polymer brushes. The combinatorial approaches explored the fab-
rication of the samples of planar brushes with a 1D or 2D gradual change of the brush
characteristics such as grafting density, molecular weight, and composition. Both the
“grafting to” and “grafting from” methods were used for the fabrication of the gradient
brushes. The brush grafting density gradient was used to study the effect of grafting
density on the brush structure in solvents.68 – 70 The mixed brushes71 – 73 and block-
copolymer brushes74 with composition gradients were used for the study of the brush
rearrangement in different solvents.
Applications of the Responsive Brushes: So Far
The major objective for the application of responsive polymer brushes is to regulate,
adjust, and switch interaction forces between the brush and its environment constituted
of liquid, vapor, solid, another brush, particles, etc. The simplest formulation of the
Responsive Polymer Brushes 409

problem is switching between attraction and repulsion. For example, the polymer brush-
like layer stabilizes colloidal dispersion, however, upon change of its environment the
colloid coagulates because the repulsive forces of the brush have been “switched off.”
This simple effect has numerous important applications in various technologies and it is
not fully explored and engineered yet. The same simple problem is important if the
friction coefficient, adhesion, or wetting could be rapidly changed to switch off and on
capillary flow, cell adhesion, protein adsorption, cell growth, membrane permeability,
and drug release. The complexity of the problem, however, is substantially increasing if
we have in mind the design of complex responsive systems which mimic functions of
life systems. Such artificially created systems will be capable of: reporting on toxins, diag-
nosing cancer cells, monitoring important parameters of organs, and targeting the release
of drugs. Currently, research is focused on how the interactions with polymer brushes may
be precisely tuned and monitored in a controlled environment.
Wetting by Solvents
Wetting of responsive brushes by solvents is the well-explored field of research. The most
practical case relevant to many applications is wetting by water. Spreading of paints,
adhesives, deposition of proteins and microorganisms, cleaning and self-cleaning
surfaces—all these processes are frequently used in different technologies and in
everyday life. Switching between wetting and nonwetting, thus, may help to improve effi-
ciency of many technological processes and may result in the fabrication of smart
materials with switchable wetting behavior.
Generally, wetting of polymer brush includes the interaction of the liquid with solid
substrate (grafting surface) and the interaction of the liquid with the tethered polymer
chains. The interaction with the brush is the most important component to approach
complete wetting of the substrate. A good solvent swells the brush and the complete
wetting is expected in this case. However, experiments show that complete wetting can
not be easily approached. Many studies report on finite contact angle for water on the
planar polymer brushes prepared from water soluble grafted polymer layers. Thus,
wetting of the brush is strongly affected by the structure of the brush-water-gas interfaces.
One of the possible explanations for this effect is the surface activity of water soluble
polymers which results in polymer bridges between the substrate and the solvent-vapor
interface. This effect may cause partial wetting.75
If the solvent quality is tuned toward a poor solvent the water contact angle will
increase due to the increased polymer brush–solvent interfacial tension. This tendency,
however, is not obvious. The scenario depends on the constitution of the grafted chains
and their microconformations in the topmost layer of the brush. A rearrangement of
polymer chains way results in “self-adaptive” behavior of the brush. The microconforma-
tion of the polymer chain at interface and the location of end-functional groups will adapt
the lowest polymer brush–solvent interfacial energy. The changes of contact angle,
therefore, will not be big. For example, a transition between good and poor solvent
conditions induced by temperature change for PNIPAM brushes has almost no effect on
the wetting behavior of the brush.76
In weak PEL brushes switching of wetting can be approached by a change of pH.23,32
For example, weak PEL brushes prepared from poly(2-vinylpyridine) (hydrophobic
backbone) are much better wettable by acidic water than by neutral or basic aqueous
solutions. Ionization of PEL brushes results in their strong swelling in aqueous
solutions77 and, therefore, in increased wettability. If polyvalent groups are explored in
S. Minko410

weak PEL brushes several wetting regimes can be obtained for the brush based on an
association-dissociation equilibrium. A three-stage switching of surface wetting was
demonstrated using phosphate-bearing polymer brushes.78
Strong PEL brushes are less sensitive to pH, however, they were found to be
responsive to the nature of counterions. The brushes prepared from poly(2-(methacry-
loyloxy)ethyltrimethylammonium chloride) have shown the collapse and transition
from 378 to 798 water contact angle if Cl2 counterions were replaced by ClO42 less
hydrated ions.79
Surface texture may strongly amplify wetting and non-wetting behavior. If the brush
is grafted on the textured surface the switching between ultrahydrophobic and hydrophilic
states can be approached.80
Mixed and block-copolymer brushes offer an interesting opportunity to freeze wetting
behavior in a non-equilibrium state. If the brush was treated by a selective solvent for
hydrophobic chains they will occupy the topmost layer of the brush. As soon as the
solvent evaporates the hydrophobic state will be “frozen.” Water will not wet the layer
and will not switch the brush because the topmost hydrophobic layer is not permeable
for water.6
Wetting by Polymers
Responsiveness of polymer brushes to polymer liquids of the same chemical structure as
the polymer brush or in other words wettability of polymer brushes by thin liquid polymer
films was in a focus of theoretical81 – 84 and experimental85 – 87 works because this problem
is very important for thin film technologies. The stability of a molten homopolymer film on
a polymer brush of identical chemical composition is of particular interest. It was found
that the stability of the film depends on the grafting density of the brush. In the case of
the brush grafted to the non-wettable solid substrate the polymer film demonstrates two
wetting/dewetting transitions. At low grafting densities the grafted polymer chains do
not change significantly the interfacial tension between the polymer melt and the solid
substrate (gsm). The film tends to dewet. As the grafting density rises, gsm decreases to
the level, when the spreading parameter (S ¼ gs 2 gsm 2 gm, where gs and gm are the
surface tensions at the vacuum/brush and vacuum/homopolymer melt interfaces,
respectively) becomes positive and the film begins to wet the substrate. In this region of
the film stability the grafted chains are totally or partially intermixed with the free
chains of the melt. The width of the brush/homopolymer interface is determined by a
balance of two effects.82 The polymer melt is a solvent. Therefore, its penetration into
the brush is entropically favored. However, that implies an extra stretching of the
grafted chains with an entropic cost of the elastic free energy. Thus, the interface width
decreases with an increase of the grafting density because the densely grafted chains
create an entropic barrier for the penetration of free polymer chains of the melt. The
decrease in the interface width is accompanied by the growth of the interfacial tension
gsm. The same effect on gsm has the increase of temperature.87 As gsm increases the
spreading parameter again becomes negative and the polymer film dewets. This
phenomenon has been called autodewetting or autophobicity. This behavior was
observed experimentally.85 – 87
Interesting wetting behavior has been reported for diblock copolymer films on
random copolymer brushes.88,89 The grafting density of the brush was adjusted to
obtain a complete wetting of the brush by the block-copolymer film. Block copolymers
are known to exhibit a variety of ordered microdomain morphologies produced by the
Responsive Polymer Brushes 411

phase separated polymer blocks. The important examples are lamellar and cylindrical
morphologies, because the orientation of lamellae and cylinders in thin films is affected
by the film interfaces. Even a small difference in interfacial tensions between the
substrate and each polymer (constituting the block copolymer) leads to the parallel orien-
tation of lamellar and cylindrical microdomains with respect to the substrate plane. In this
state the polymer block that has the lowest interfacial tension wets a substrate surface thus
allowing for minimization of the interfacial energy. The perpendicular orientation,
however, is more preferable in terms of a potential application of block copolymer
films as nanolithographic templates. This orientation implies that both phases wet the
substrate surface, therefore, the substrate has no preference with respect to any block.
Such a neutral surface can be prepared by modification of a substrate surface with a
random copolymer brush. A random copolymer brush allows for precise control over
the interfacial interactions simply by changing the copolymer composition. That has
been demonstrated for films of a polysterene-block-poly(methyl methacrylate)
deposited on silicon substrates modified with brushes of a random copolymer of styrene
and methyl methacrylate.88,89 The perpendicular orientation of the lamellar and cylindrical
microdomains was observed for the certain copolymer compositions.
Brush-Brush, Brush-Solid, and Brush-Particle Interactions
These interactions represent a classical field of colloid science.90,91 Polymer brushes
stabilize colloids because of repulsive forces (originated from the excluded volume
effect) which oppose the brush compression. At a moderate grafting density the interpene-
tration of the two interacting brushes may lead to an attraction if the interaction of grafted
chains with the interacting surface dominates. Both repulsive and attractive interactions
were well documented in experiments (for example).92 – 94 For PEL brushes electrostatic
interactions may strongly modify the interactions resulting in strong repulsion between
similarly charged brushes.95 Therefore, the interactions between two brushes or the
brush and solid surface is a tiny balance between volume excluded effect, attractive
interactions (van der Waals) and Coulomb interactions. The balance can be tuned by a
change of environmental conditions (temperature, pH, ionic strength). In the case of
mixed polymer brushes or the block-copolymer brushes the balance between attractive
and repulsive interactions can be switched depending on which polymer preferentially
segregates to the topmost layer of the brush or on how the interaction with the solid
surface will change the phase segregation in mixed/block-copolymer brushes.7,49,96
It is difficult to overestimate the importance of the interaction regulation between
polymer-coated solids.
The responsiveness of a polymer brush to the insertion of a small impenetrable object
is the problem of a special and very important interest. These phenomena are critical for
the regulation/control of particle, dust, protein, and cell adsorption on polymer brushes.
Theoretical analysis shows that the insertion of a small object in the polymer brush
creates a repulsive pressure field which decays exponentially away from the region of
insertion.97,98 Interaction with the brush also affects the spatial organization of particles
in the brush. Small particles that strongly interact with the polymer brush disperse
freely within the polymer brush, while polymer “insoluble” particles tend to aggregate
in the brush. The big aggregates are expelled towards the brush-air interface.99
Therefore, switching particle-polymer interactions via the change of solvent quality will
affect the particle organization in polymer brushes100 and can be used for a controlled
release of particles from the surfaces.101
S. Minko412

The interaction between particles/proteins and a brush in real systems is much more
complex since many different forces are involved in the phenomenon. The amount of
protein adsorbed on the surfaces depends on the surface density of the polymer, the
protein-surface interaction, the polymer-surface interaction, the size of the polymer
segments, and the ability of the proteins to undergo conformational changes upon adsorp-
tion.102 – 105 For the example of polyethyleneoxide (PEO) brushes, the adsorption of
proteins is governed by the interplay between the attractive interaction of the protein
with the surface, the attractive interaction of the adsorbed PEO segments with the
grafting surface, and the entropic changes associated with the deformation of the PEO
layer due to the adsorbing proteins. In the case of the grafting surface which is not attrac-
tive for PEO the amount of protein adsorbed depends on how the adsorbing protein
deforms the PEO brush. The mechanism responsible for the prevention of protein adsorp-
tion by grafted PEO results from the ability of the grafted polymer to block the adsorption
sites on the grafting surface. Therefore, the fact that the PEO is attracted to the surface
results in more effective control of nonspecific protein adsorption. It was found exper-
imentally104 that the surface concentration of adsorbed proteins decreased as the surface
density of the grafted PEO increased, but the surface concentration of the adsorbed
protein never reached zero. An analysis of the protein adsorption dynamics shows that
brushes of the same constitution express a different efficiency in the prevention of
protein adsorption at different time scales. The polymers that are not attracted to the
surface are effective for kinetic control but not good for equilibrium reduction of
protein adsorption, while polymers with attractions to the surface show exactly the
opposite behavior.106 This result demonstrates the importance of the brush response in
dynamics. These problems are still very poorly investigated.
If considering PEL brushes, the electrostatic interactions between proteins and the
brush should be also taken into account.107 The electrostatic interactions are easily
tuned by pH change since proteins are polyampholytic molecules constituted of weak
acids and bases. Ionic strength also strongly contributes to protein adsorption on
polyelectrolyte brushes that opens really broad possibilities to regulate protein
adsorption/desorption processes.108
Interaction with biological molecules is a very complex phenomena. Precisely
tailored materials for controlled interactions with proteins and cells will explore a
complex architecture when a wide spectrum of forces will be used. To this end the func-
tional polymer brushes bearing ionizable groups and other type of functional groups
located at different distances from the grafting surfaces are promising candidates to
design and tune the brush-layer response.109
Application in Devices
One of the targets is the application of the responsive brushes for smart devices such as
drug delivery devices, microfludic analytical devices, and sensors. Smart drug delivery
devices are seen as a drug loaded capsule coated with a brush-like shell. The first
approach to drug delivery devices comprised the fabrication of stealth particles coated
with PEO brushes. The brush masks the particles from macrophages and results in an
increase in the blood circulation half-life of the particles by several orders of
magnitude.110 – 112 The next step could be seen as a fabrication of the particle shell
from a mixed spherical brush constituted of polymer chains (which control nonspecific
adsorption) and embedded selective centers for the specific adsorption and targeting the
drug release. Intensive investigations in this field for controlled drug release are outside
Responsive Polymer Brushes 413

of the frames of this review. The precise design of the capsule will need intensive research
on the development of the fundamental backgrounds for understanding the interactions of
responsive brushes with biological objects. The first experiments show that responsive
polymer brushes can switch the protein adsorption upon external signal.113,114
Expansion and shrinking of responsive polymer brushes can be used to fabricate
mechanical actuators.115,116 The effect of switching of wetting behavior of the mixed
weak PEL brushes upon a change of pH was recently explored for the fabrication of
“smart” microfluidic devices. The passage of liquids through the microfluidic channels
was regulated by responsiveness of the mixed brushes of different compositions.117
Reversible changes of mixed brush morphologies in solvents of different thermodynamic
quality were used for the motion of nanoparticles deposited on the brush surface.100
The simplest device which explores a polymer brush responsiveness is a sensor
working on the principle of the brush expansion–collapse transitions upon changes in
its environment. For example, the strong PEL brush expands in a humid atmosphere.
That can be detected as a change of a bending of the micromechanical cantilever (with
a single-sided brush layer)118,119 or as a change of optical characteristics of the brush
layer using ellipsometry,32 surface plasmon resonance spectroscopy23 or fluorescence
intensity.120 The brush expansion-collapse was also detected as a shift of an absorption
band in visual spectra based on the principle of the transmission plasmon spectroscopy
when the responsive brush was synthesized on the top of gold nanoislands deposited on
the glass substrate. The brush was coated by a monolayer of gold nanoparticles. The
change in the distance between gold nanoparticles and nanoislands upon expansion and
collapse of the polymer brush resulted in the shift of the absorbance band in visual
spectra.121
Conclusions
The field of responsive polymer brushes is a continuously expanding area of research. The
expansion is not very fast because of the complexity of the systems for the fabrication as
well as for investigations. Nevertheless, the continuous and successful development of the
field is predetermined by the fact that the polymer brushes are the most effective structures
to regulate complex interactions in synthetic colloidal and natural living systems. The
potential for the design of the interactions is very high. Mimicking natural systems and
designing new structures will accompany the development of the field of polymer
brushes. That will stimulate expansion of theoretical and experimental investigations.
We may also benefit from the combination of polymer brushes and gels in complex
responsive devices. A number of reports on the application of polymer brushes for
devices is still very small. Further expansion of the field will appear in the near future.
Acknowledgement
Work described in this review was supported in part by the NSF award CTS 0456548 and
US ARO grant W911NF-05–1–0339.
References
1. Milner, S. T. “Polymer brushes”, Science 1991, 251, 905–914.
2. Advincula, R. C.; Brittain, W. J.; Caster, K. C.; Ruehe, J., Eds. Polymer Brushes; Wiley-VCH:
Weinheim, 2004.
S. Minko414

3. Halperin, A.; Tirrell, M.; Lodge, T. P. “Tethered chains in polymer microstructures”, Adv.
Polym. Sci. 1992, 100, 31–71.
4. Zhao, B.; Brittain, W. J. “Polymer brushes: surface-immobilized macromolecules”, Prog.
Polym. Sci. 2000, 25, 677–710.
5. Motornov, M.; Minko, S.; Eichhorn, K. J.; Nitschke, M.; Simon, F.; Stamm, M. “Reversible
tuning of wetting behavior of polymer surface with responsive polymer brushes”, Langmuir
2003, 19, 8077–8085.
6. Luzinov, I.; Minko, S.; Tsukruk, V. V. “Adaptive and responsive surfaces through controlled
reorganization of interfacial polymer layers”, Prog. Polym. Sci. 2004, 29, 635–698.
7. Balazs, A. C.; Singh, C.; Zhulina, E.; Chern, S. S.; Lyatskaya, Y.; Pickett, G. “Theory of
polymer chains tethered at interfaces”, Prog. Surf. Sci. 1997, 55, 181–269.
8. de Gennes, P.-G. “Conformations of polymers attached to an interface”, Macromolecules 1980,
13, 1069–1075.
9. Alexander, S. “Adsorption of chain molecules with a polar head: a scaling prediction”, J. Phys.
(Paris) 1997, 38, 983–987.
10. Auroy, P.; Auvray, L.; Leger, L. “Characterization of the brush regime for grafted polymer
layers at the solid-liquid interface”, Phys. Rev. Lett. 1991, 66, 719–722.
11. Lai, P. Y.; Binder, K. “Structure and dynamics of polymer brushes near the T point: a Monte-
Carlo simulation.” J. Chem. Phys. 1992, 97, 586–595.
12. Williams, D. R. M. “Grafted polymers in bad solvents: octopus surface micelles”, J. Phys. II
France 1993, 3, 1313–1318.
13. Szleifer, I.; Carignano, M. A. “Tethered polymer layers”, Adv. Chem. Phys. 1996, 94,
165–260.
14. Yim, H.; Kent, M. S.; Mendez, S.; Balamurugan, S. S.; Balamurugan, S.; Lopez, G. P.;
Satija, S. “Temperature-dependent conformational change of PNIPAM grafted chains at
high surface density in water”, Macromolecules 2004, 37, 1994–1997.
15. Yim, H.; Kent, M. S.; Huber, D. L.; Satija, S.; Majewski, J.; Smith, G. S. “Conformation of
end-tethered PNIPAM chains in water and in acetone by neutron reflectivity”, Macromolecules
2003, 36, 5244–5251.
16. Milner, S. T.; Witten, T. A.; Cates, M. E. “Theory of the grafted polymer brush”, Macro-
molecules 1988, 21, 2610–2619.
17. Skvortsov, A. M.; Gorbunov, A. A.; Pavlushkov, V. A.; Zhulina, E. B.; Borisov, O. V.;
Priamitsyn, V. A. “Structure of dense-grafted polymer monolayers”, Polym. Sci. USSR
1988, 30, 1706.
18. Semenov, A. N. “Contribution to the theory of microphase layering in block-copolymer melts”,
Sov. Phys. JETP 1985, 61, 733–742.
19. Netz, R. R.; Schick, M. “Classical theory of polymer brushes”, Europhys. Lett. 1997, 38,
37–42.
20. Kreer, T.; Metzger, S.; Muller, M.; Binder, K.; Baschnagel, J. “Static properties of end-tethered
polymers in good solution: A comparison between different models”, J. Chem. Phys. 2004,
120, 4012–4023.
21. Netz, R. R.; Schick, M. “Polymer Brushes: From self-consistent field theory to classical
theory”, Macromolecules 1998, 31, 5105–5122.
22. Pincus, P. “Colloid stabilization with grafted polyelectrolytes”, Macromolecules 1991, 24,
2912–2919.
23. Ruhe, J.; Ballauff, M.; Biesalski, M.; Dziezok, P.; Grohn, F.; Johannsmann, D.; Houbenov, N.;
Hugenberg, N.; Konradi, R.; Minko, S.; Motornov, M.; Netz, R. R.; Schmidt, M.; Seidel, C.;
Stamm, M.; Stephan, T.; Usov, D.; Zhang, H. “Polyelectrolyte brushes”, In Polyelectrolytes
with Defined Molecular Architecture I; Schmidt, M., Ed. Adv. Polym. Sci.; Springer:
New-York, 2004; pp 79–150.
24. Israels, R.; Leermakers, F. A. M.; Fleer, G. J. “On the theory of grafted weak polyacids”,
Macromolecules 1994, 27, 3087–3093.
Responsive Polymer Brushes 415

25. Guo, X.; Ballauff, M. “Spherical polyelectrolyte brushes: Comparison between annealed and
quenched brushes”, Phys. Rev. E 2001, 64, 051406.
26. Minko, S.; Muller, M.; Usov, D.; Scholl, A.; Froeck, C.; Stamm, M. “Lateral versus perpen-
dicular segregation in mixed polymer brushes”, Phys. Rev. Lett. 2002, 88, 035502.
27. Milner, S. T.; Witten, T. A.; Cates, M. E. “Effects of polydispersity in the end-grafted polymer
brush”, Macromolecules 1989, 22, 853–861.
28. Kent, M. S.; Factor, B. J.; Satija, S.; Gallagher, P.; Smith, G. S. “Structure of bimodal polymer
brushes in a good solvent by neutron reflectivity”, Macromolecules 1996, 29, 2843–2849.
29. Goedel, W. A.; Luap, C.; Oeser, R.; Lang, P.; Braun, C.; Steitz, R. “Stratification in monolayers
of a bidisperse melt polymer brush as revealed by neutron reflectivity”, Macromolecules 1999,
32, 7599–7609.
30. Minko, S.; Luzinov, I.; Luchnikov, V.; Muller, M.; Patil, S.; Stamm, M. “Bidisperse mixed
brushes: Synthesis and study of segregation in selective solvent”, Macromolecules 2003, 36,
7268–7279.
31. Shusharina, N. P.; Linse, P. “Oppositely charged polyelectrolytes grafted onto planar surface:
Mean-field lattice theory”, Eur. Phys. J. E 2001, 6, 147–155.
32. Houbenov, N.; Minko, S.; Stamm, M. “Mixed polyelectrolyte brush from oppositely charged
polymers for switching of surface charge and composition in aqueous environment”, Macro-
molecules 2003, 36, 5897–5901.
33. Biesheuvel, P. M.; Stuart, M. A. C. “Electrostatic free energy of weakly charged macromol-
ecules in solution and intermacromolecular complexes consisting of oppositely charged
polymers”, Langmuir 2004, 20, 2785–2791.
34. Zhulina, E. B.; Singh, C.; Balazs, A. C. “Forming patterned films with tethered diblock copo-
lymers”, Macromolecules 1996, 29, 6338–6348.
35. Zhulina, E. B.; Singh, C.; Balazs, A. C. “Self-assembly of tethered diblocks in selective
solvents”, Macromolecules 1996, 29, 8254–8259.
36. Zhao, B.; Brittain, W. J.; Zhou, W.; Chemg, S. Z. D. “Nanopattern formation from tethered PS-
b-PMMA brushes upon treatment with selective solvents”, J. Am. Chem. Soc. 2000, 122,
2407–2408.
37. Zhao, B.; Brittain, W. J.; Zhou, W. S.; Cheng, S. Z. D. “AFM study of tethered polystyrene-b-
poly(methyl methacrylate) and polystyrene-b-poly(methyl acrylate) brushes on flat silicate
substrates”, Macromolecules 2000, 33, 8821–8827.
38. Zhao, B.; Brittain, W. J. “Synthesis, characterization, and properties of tethered polystyrene-b-
polyacrylate brushes on flat silicate substrates”, Macromolecules 2000, 33, 8813–8820.
39. Boyes, S. G.; Brittain, W. J.; Weng, X.; Cheng, S. Z. D. “Synthesis, characterization, and
properties of ABA type triblock copolymer brushes of styrene and methyl acrylate prepared
by atom transfer radical polymerization”, Macromolecules 2002, 35, 4960–4967.
40. Boyes, S. G.; Akgun, B.; Brittain, W. J.; Foster, M. D. “Synthesis, characterization, and
properties of polyelectrolyte block copolymer brushes prepared by atom transfer radical
polymerization and their use in the synthesis of metal nanoparticles”, Macromolecules 2003,
36, 9539–9548.
41. Witten, T. A.; Pincus, P. “Colloid stabilization by long grafted polymers”, Macromolecules
1986, 19, 2509–2513.
42. Grest, G. S.; Kremer, K.; Witten, T. A. “Structure of many arm star polymers: A molecular
dynamics simulation”, Macromolecules 1987, 20, 1376–1383.
43. Richter, D.; Stuhn, B.; Ewen, B.; Nerger, D. “Collective relaxation of star polymers—A
neutron spin-echo study”, Phys. Rev. Lett. 1987, 58, 2462–2465.
44. Guo, X.; Weiss, A.; Ballauff, M. “Synthesis of spherical polyelectrolyte brushes by
photoemulsion polymerization”, Macromolecules 1999, 32, 6043–6046.
45. Guo, X.; Ballauff, M. “Spatial dimensions of colloidal polyelectrolyte brushes as determined
by dynamic light scattering”, Langmuir 2000, 16, 8719–8726.
S. Minko416

46. Li, D. J.; Sheng, X.; Zhao, B. “Environmentally responsive “Hairy” nanoparticles: Mixed
homopolymer brushes on silica nanoparticles synthesized by living radical polymerization
techniques”, J. Am. Chem. Soc. 2005, 127, 6428–6256.
47. Lupitskyy, R.; Roiter, Y.; Tsitsilianis, C.; Minko, S. “From smart polymer molecules to respon-
sive nanostructured surfaces”, Langmuir 2005, 21, 8591–8593.
48. Szleifer, I.; Yerushalmi-Rozen, R. “Polymers and carbob nanotubes-dimensionality, inter-
actions and nanotechnology”, Polymer 2005, 46, 7803–7818.
49. Singh, C.; Pickett, G. T.; Zhulina, E.; Balazs, A. C. “Modeling the interactions between
polymer-coated surfaces”, J. Phys. Chem. B 1997, 101, 10614–10624.
50. Boyce, J. R.; Sun, F. C.; Sheiko, S. “Stimuli-responsive brushlike macromolecules”, In
Responsive Polymer Materials: Design and Applications; Minko, S., Ed.; Blackwell Publish-
ing Professional: Ames, 2006; pp 1–21.
51. Li, C.; Gunari, N.; Fischer, K.; Janshoff, A.; Schmidt, M. “New perspectives for the design of
molecular actuators: thermally induced collapse of single macromolecules from cylindrical
brushes to spheres”, Angew. Chem. Int. Ed. 2004, 43, 1101–1104.
52. Khalatur, P. G.; Khokhlov, A. R.; Prokhorova, S. A.; Sheiko, S. S.; Moller, M.; Reineker, P.;
Shirvanyanz, D. G.; Starovoitova, N. “Unusual conformation of molecular cylindrical brushes
strongly adsorbed on a flat solid surface”, Eur. Phys. J. E 2000, 1, 99–103.
53. Zhulina, E.; Balazs, A. C. “Designing patterned surfaces by grafting Y-shaped copolymers”,
Macromolecules 1996, 29, 2667–2673.
54. Julthongpiput, D.; Lin, Y. H.; Teng, J.; Zubarev, E. R.; Tsukruk, V. V. “Y-shaped polymer
brushes: Nanoscale switchable surfaces”, Langmuir 2003, 19, 7832–7836.
55. Kim, J.-B.; Huang, W.; Wang, C.; Bruening, M. L.; Baker, G. L. “Bottle brush brushes: Ring-
opening polymerization of lactide from poly(hydroxyethyl methacrylate) surfaces”, In
Polymer Brushes; Advincula, R. C., Brittain, W. J., Caster, K. C., Ruehe, J., Eds.; Wiley-
VCH: Weinheim, 2003.
56. Mori, H.; Muller, A. H. E. “Surface-grafted hyperbranched polymers”, In Polymer Brushes;
Advincula, R. C., Brittain, W. J., Caster, K. C., Ruehe, J., Eds.; Wiley-VCH: Weinheim, 2003.
57. Discher, D. E.; Eisenberg, A. “Polymer vesicles”, Science 2002, 297, 967–973.
58. Hu, Z. J.; Jonas, A. M.; Varshney, S. K.; Gohy, J. F. “Dilution-induced spheres-to-vesicles
morphological transition in micelles from block copolymer/surfactant complexes”, J. Am.
Chem. Soc. 2005, 127, 6526–6527.
59. Liu, S. Y.; Billingham, N. C.; Armes, S. P. “A schizophrenic water-soluble diblock
copolymer”, Angew. Chem. Int. Edit. 2001, 40, 2328– þ .
60. Liu, S. Y.; Armes, S. P. “Polymeric surfactants for the new millennium: A pH-responsive,
zwitterionic, schizophrenic diblock copolymer”, Angew. Chem. Int. Edit. 2002, 41,
1413–1416.
61. Discher, B. M.; Won, Y.-Y.; Ege, D. S.; Lee, J. C.-M.; Bates, F. S.; Discher, D. E.;
Hammer, D. A. “Polymersomes: tough vesicles made from diblock copolymers”, Science
1999, 284, 1143–1146.
62. Lee, W.-K.; Kaholek, M.; Ahn, S.-J.; Zauscher, S. “Nanopatterning of stimuli-responsive
polymer brushes by scanning probe and electron beam lithography”, In Responsive Polymer
Materials: Design and Applications; Minko, S., Ed.; Blackwell Publishing Professional:
Ames, 2006; pp 84–100.
63. Dyer, D. J. “Patterning of gold substrates by surface-initiated polymerization”, Adv. Funct.
Mater. 2003, 13, 667–670.
64. Shah, R. R.; Merreceyes, D.; Husemann, M.; Rees, I.; Abbott, N. L.; Hawker, C. J.;
Hedrick, J. L. “Using atom transfer radical polymerization to amplify monolayers of initiators
patterned by microcontact printing into polymer brushes for pattern transfer”, Macromolecules
2000, 33, 597–605.
65. Kaholek, M.; Lee, W. K.; LaMattina, B.; Caster, K. C.; Zauscher, S. “Fabrication of stimulus-
responsive nanopatterned polymer brushes by scanning-probe lithography”, Nano Lett. 2004,
4, 373–376.
Responsive Polymer Brushes 417

66. Zauscher, S.; Chilkoti, A.; Ahn, S. J.; Hyun, J.; Lee, W. K. “Fabrication of surface confined,
stimulus-responsive polymer nanostructures using dip-pen nanolithography”, Abstr. Pap.
Am. Chem. Soc. 2003, 225, U655–U655.
67. Ahn, S. J.; Kaholek, M.; Lee, W. K.; LaMattina, B.; LaBean, T. H.; Zauscher, S. “Surface-
initiated polymerization on nanopatterns fabricated by electron-beam lithography”, Adv.
Mater. 2004, 16, 2141–2145.
68. Wu, T.; Efimenko, K.; Vlcek, P.; Subr, V.; Genzer, J. “Formation and properties of anchored
polymers with a gradual variation of grafting densities on flat substrates”, Macromolecules
2003, 36, 2448–2453.
69. Wu, T.; Efimenko, K.; Genzer, J. “Combinatorial study of the mushroom-to-brush crossover in
surface anchored polyacrylamide”, J. Am. Chem. Soc. 2002, 124, 9394–9395.
70. Ionov, L.; Zdyrko, B.; Sidorenko, A.; Minko, S.; Klep, V.; Luzinov, I. “Gradient polymer
layers by grafting to approach”, Macromol. Rapid Comm. 2004, 25, 360–365.
71. Ionov, L.; Sidorenko, A.; Stamm, M.; Minko, S.; Zdyrko, B.; Klep, V.; Luzinov, I. “Gradient
mixed brushes: “Grafting to” approach”, Macromolecules 2004, 37, 7421–7423.
72. Ionov, L.; Houbenov, N.; Sidorenko, A.; Stamm, M.; Luzinov, I.; Minko, S. “Inverse and
reversible switching gradient surfaces from mixed polyelectrolyte brushes”, Langmuir 2004,
20, 9916–9919.
73. Zhao, B. “A combinatorial approach to study solvent-induced self-assembly of mixed poly
(methyl methacrylate)/polystyrene brushes on planar silica substrates: Effect of relative
grafting density”, Langmuir 2004, 20, 11748–11755.
74. Xu, C.; Wu, T.; Batteas, J. D.; Drain, C. M.; Beers, K. L.; Fasolka, M. J. “Surface-grafted block
copolymer gradients: Effect of block length on solvent response”, Appl. Surf. Sci. 2006, 252,
2529–2534.
75. Cohen Stuart, M. A.; de Vos, w. M.; Leermakers, F. “Why surfaces modified by flexible
polymers often have a finite contact angle for good solvents”, Langmuir 2005, 22, 1722–1728.
76. Kidoaki, S.; Ohya, S.; Nakayama, Y.; Matsuda, T. “Thermoresponsive structural change of a
poly(N-isopropylacrylamide) graft layer measured with an atomic force microscope”,
Langmuir 2001, 17, 2402–2407.
77. Biesalski, M.; Johannsmann, D.; Ruhe, J. “Synthesis and swelling behavior of a weak polyacid
brush”, J. Chem. Phys. 2002, 117, 4988–4994.
78. Zhou, F.; Huck, W. T. S. “Three-stage switching of surface wetting using phosphate-bearing
polymer brush”, Chem. Commun. 2005, 5999–6001.
79. Azzaroni, O.; Moya, S.; Farhan, T.; Brown, A. A.; Huck, W. T. S. “Switching the properties of
polyelectrolyte brushes via “Hydrophobic collapse””, Macromolecules 2005, 38,
10192–10199.
80. Minko, S.; Muller, M.; Motornov, M.; Nitschke, M.; Grundke, K.; Stamm, M. “Two-level
structured self-adaptive surfaces with reversibly tunable properties”, J. Am. Chem. Soc.
2003, 125, 3896–3900.
81. Muller, M.; MacDowell, L. G. “Wetting of a short chain liquid on a brush: First-order and
critical wetting transitions”, Europhys. Lett. 2001, 55, 221–227.
82. Gay, C. “Wetting of a polymer brush by a chemically identical polymer melt”, Macromol-
ecules 1997, 30, 5939–5943.
83. Matsen, M. W.; Gardiner, J. M. “Autophobic dewetting of homopolymer on a brush and
entropic attraction between opposing brushes in a homopolymer matrix”, J. Chem. Phys.
2001, 115, 2794–2804.
84. Matsen, M. W. “Scaling behavior of a brush-homopolymer interface in the limit of high
grafting density”, J. Chem. Phys. 2005, 122, Art. No 144904.
85. Liu, Y.; Rafailovich, M. H.; Sokolov, J.; Schwarz, S. A.; Zhong, X.; Eisenberg, A.;
Kramer, E. J.; Sauer, B. B. “Wetting behavior of homopolymer films on chemically similar
block copolymer surfaces”, Phys. Rev. Lett. 1994, 73, 440–443.
86. Voronov, A.; Shafranska, O. “Dependence of thin polystyrene films stability on the thickness
of grafted polystyrene brushes”, Polymer 2003, 44, 277–281.
S. Minko418

87. Reiter, G.; Khanna, R. “Negative excess interfacial entropy between free and end-grafted
chemically identical polymers”, Phys. Rev. Lett. 2000, 85, 5599–5602.
88. Huang, E.; Rockford, L.; Russell, T. P.; Hawker, C. J. “Nanodomain control in copolymer thin
films”, Nature 1998, 395, 757–758.
89. Huang, E.; Russell, T. P.; Harrison, C.; Chaikin, P. M.; Register, R. A.; Hawker, C. J.; Mays, J.
“Using surface active random copolymers to control the domain orientation in diblock
copolymer thin films”, Macromolecules 1998, 31, 7641–7650.
90. Napper, D. H.; Napper, D. H. Polymeric Stabilization of Colloid Dispersions; Academic:
New York, 1983.
91. Fleer, G.; Cohen Stuart, M. A.; Scheutjens, J. M. H. M.; Cosgrove, T.; Vincent, B.; Fleer, G.;
Cohen Stuart, M. A.; Scheutjens, J. M. H. M.; Cosgrove, T.; Vincent, B. Polymers at Inter-
faces; Chapman & Hall: London, 1993.
92. Taunton, H. J.; Toprakcioglu, C.; Fetters, L. J.; Klein, J. “Forces between surfaces bearing
terminally anchored polymer chains in good solvent”, Nature 1988, 332, 712–714.
93. Goodman, D.; Kizhakkedathu, J. N.; Brooks, D. E. “Attractive bridging interactions in dense
polymer brushes in good solvent measured by atomic force microscopy”, Langmuir 2004, 20,
2333–2340.
94. Eiser, E.; Klein, J.; Witten, T. A.; Fetters, L. J. “Shear of telechelic brushes”, Phys. Rev. Lett.
1999, 82, 5076–5079.
95. Raviv, U.; Giasson, S.; Kampf, N.; Gohy, J. F.; Jerome, R.; Klein, J. “Lubrication by charged
polymers”, Nature 2003, 425, 163–165.
96. Minko, S.; Muller, M.; Luchnikov, V.; Motornov, M.; Usov, D.; Ionov, L.; Stamm, M. “Mixed
polymer brushes: switching of surface behavior and chemical patterning at the nanoscale”, In
Polymer Brushes; Advincula, R. C., Brittain, W. J., Caster, K. C., Ruehe, J., Eds.; Wiley-VCH:
Weinheim, 2004; pp 403–425.
97. Solis, F. J.; Tang, H. “A bulk perturbation in a grafted Brush”, Macromolecules 1996, 29,
7953–7959.
98. Subramanian, G.; Williams, D. R. M.; Pincus, P. A. “Interaction between finite-sized particles
and end grafted polymers”, Macromolecules 1996, 29, 4045–4050.
99. Kim, J. U.; O’Shaughnessy, B. “Morphology selection of nanoparticle dispersions by polymer
media”, Phys. Rev. Lett. 2002, 89, Art. No 238301.
100. Santer, S.; Ruhe, J. “Motion of nano-objects on polymer brushes”, Polymer 2004, 45,
8279–8297.
101. Fang, F.; Szleifer, I. “Controlled release of proteins from polymer-modified surfaces”, Proc.
Natl. Acad. Sci. USA 2006, 103, 5769–5774.
102. McPherson, T.; Kidane, A.; Szleifer, I.; Park, K. “Prevention of protein adsorption by tethered
poly(ethylene oxide) layers: Experiments and single-chain mean-field analysis”, Langmuir
1998, 14, 176–186.
103. Fang, F.; Szleifer, I. “Effect of molecular structure on the adsorption of protein on surfaces with
grafted polymers”, Langmuir 2002, 18, 5497–5510.
104. Kidane, A.; Mcpherson, T. B.; Szleifer, I.; Park, K. “Protein adsorption on PEO-grafted
surfaces: Theoretical analysis and experimental observation”, Abstr. Pap. Am. Chem. Soc.
1997, 214, 299–Pmse.
105. Szleifer, I. “Polymers and proteins: Interactions at interfaces”, Curr. Opin. Solid. St. M. 1997,
2, 337–344.
106. Satulovsky, J.; Carignano, M. A.; Szleifer, I. “Kinetic and thermodynamic control of protein
adsorption”, P. Natl. Acad. Sci. USA 2000, 97, 9037–9041.
107. Carignano, M. A.; Szleifer, I. “Adsorption of model charged proteins on charged surfaces with
grafted polymers”, Mol. Phys. 2002, 100, 2993–3003.
108. Wittemann, A.; Haupt, B.; Ballauff, M. “Adsorption of proteins on spherical polyelectrolyte
brushes in aqueous solution”, Phys. Chem. Chem. Phys. 2003, 5, 1671–1677.
109. Gong, P.; Szleifer, I. “Interactions between charged surfaces and functionalized grafted
polymer layers”, Ind. Eng. Chem. Res, 2006, published on the web (28-Jan-2006).
Responsive Polymer Brushes 419

110. Gref, R.; Luck, M.; Quellec, P.; Marchand, M.; Dellacherie, E.; Harnisch, S.; Blunk, T.;
Muller, R. H. “‘Stealth’ corona-core nanoparticles surface modified by polyethylene glycol
(PEG): influences of the corona (PEG chain length and surface density) and of the core com-
position on phagocytic uptake and plasma protein adsorption”, Colloid. Surface. B 2000, 18,
301–313.
111. Owens, D. E.; Peppas, N. A. “Opsonization, biodistribution, and pharmacokinetics of
polymeric nanoparticles”, Int. J. Pharm. 2006, 307, 93–102.
112. Peracchia, M. T. “Stealth nanoparticles for intravenous administration”, Stp. Pharma. Sci.
2003, 13, 155–161.
113. Preprints of Papers—American Chemical Society, Nikolay, D. O. F. C.; Ionov, L.; Minko, S.;
Stamm, M. “Control of protein adsorption on responsive polymer surfaces”, Polymer Preprints
(American Chemical Society, Division of Polymer Chemistry) 2005, 46, 1229–1230.
114. Houbenov, N.; Ionov, L.; Minko, S.; Stamm, M. “Control of protein adsorption on responsive
polymer surfaces”, Polymer Preprints (American Chemical Society, Division of Polymer
Chemistry) 2005, 46, 1229–1230.
115. Ryan, A. J.; Crook, C. J.; Howse, J. R.; Topham, P.; Geoghegan, M.; Martin, S. J.;
Parnell, A. J.; Ruiz-Perez, L.; Jones, R. A. L. “Mechanical actuation by responsive polyelec-
trolyte brushes and triblock gels”, J. Macromol. Sci. Phys. 2005, B44, 1103–1121.
116. Ryan, A. J.; Crook, C. J.; Howse, J. R.; Topham, P.; Jones, R. A. L.; Geoghegan, M.;
Parnell, A. J.; Ruiz-Perez, L.; Martin, S. J.; Cadby, A.; Menelle, A.; Webster, J. R. P.;
Gleeson, A. J.; Bras, W. “Responsive brushes and gels as components of soft nanotechnology”,
Faraday Discuss. 2005, 128, 55–74.
117. Ionov, L.; Houbenov, N.; Sidorenko, A.; Stamm, M.; Minko, S. “Smart microfluidic channels”,
Adv. Funct. Mater. 2006, 16, 1153–1160.
118. Bumbu, G. G.; Kircher, G.; Wolkenhauer, M.; Berger, R.; Gutmann, J. S. “Synthesis and
characterization of polymer brushes on micromechanical cantilevers”, Macromol. Chem.
Physic. 2004, 205, 1713–1720.
119. Zhou, F.; Shu, W.; Welland, M.; Huck, W. T. S. “Highly reversible and multi-stage cantilever
actuation driven by polyelectrolyte brushes”, J. Am. Chem. Soc. 2006, 128, 5326–5327.
120. Ionov, L.; Sapra, S.; Synytska, A.; Rogach, A. L.; Stamm, M.; Diez, S. “Fast and spatially
resolved environmental probing using stimuli-responsive polymer layers and fluorescent nano-
crystals”, Adv. Mater. 2006, 18, 1453–1457.
121. Tokareva, I.; Minko, S.; Fendler, J. H.; Hutter, E. “Nanosensors based on responsive
polymer brushes and gold nanoparticle enhanced transmission surface plasmon resonance
spectroscopy”, J. Am. Chem. Soc. 2004, 126, 15950–15951.
S. Minko420



![Polymer Brushes: On the Way to Tailor-Made Surfacescatalogimages.wiley.com/images/db/pdf/3527310339.excerpt.pdf · brushes”[10].Polymerbrushesareveryinterestingsystems,asthestrongstretching](https://img.dokumen.tips/doc/110x75/5b89597e7f8b9a851a8d6d65/polymer-brushes-on-the-way-to-tailor-made-s-brushes10polymerbrushesareveryinterestingsystemsasthestrongstretching.jpg)

























