Embed Size (px)
DESCRIPTION
apostila
Citation preview

RESISTÊNCIA DOS MATERIAIS PARA ENGENHARIA CIVIL
PROFESSOR CELSO JOSÉ LEÃO E SILVA
2015.2

Página 2 de 47
ÍNDICE
Capítulo 1 – Introdução 03
1.1. Domínio de Estudo de Análise Estrutural 03
1.2. Força 03
1.3. Momento 04
1.4. Condições de Equilíbrio 04
1.5. Graus de Liberdade 05
1.6. Apoios 06
1.7. Estaticidade e Estabilidade 07
Capítulo 2 – Esforços 08
2.1. Esforços Simples 08
Capítulo 3 – Vigas Biapoiadas 10
3.1. Vigas Biapoiadas Simples 10
3.2. Vigas Engastadas e Livres 13
3.3. Vigas Biapoiadas com Balanços 13
3.4. Vigas Gerber 14
Capítulo 4 – Estudo dos Quadros Isostáticos 16
Capítulo 5 – Propriedades das Superfícies 17
5.1. Momento de Inércia I 17
5.2. Teorema dos eixos paralelos para uma área 18
5.3. Lei de Hooke 19
Lista de Exercícios – 1ª Unidade 20
Capítulo 6 – Deformação em Elementos Retos 23
6.1. Deformações por Flexão 23
6.2. Deformações por Variação Térmica 26
Capítulo 7 – Deformação por Flexão em Vigas Compostas 27
7.1. Método da Seção Transformada 27
7.2. Método da Seção Transformada para Vigas de Concreto Armado 29
Capítulo 8 – Tensões Normais – Tração e Compressão 31
8.1. Deformação de Componentes sob Carregamento Axial 32
Capítulo 9 – Tensões de Cisalhamento 34
Capítulo 10 – Tensões de Torção. 35
10.1. Momento torsor 36
Lista de Exercícios – 2ª Unidade 39
Bibliografia 45
Apêndice I – Gabarito - Lista de Exercícios – 1ª Unidade 46
Apêndice II – Gabarito - Lista de Exercícios – 2ª Unidade 47

Página 3 de 47
Capítulo 1 INTRODUÇÃO
1.1. Domínio de Estudo de Análise Estrutural
A Análise Estrutural é a parte da Mecânica que estuda as estruturas, a
determinação dos esforços e suas deformações, quando solicitadas por agentes
externos (cargas, variações térmicas, movimento de seus apoios, etc.).
As estruturas se compõem de uma ou mais peças, formando um conjunto
estável, capaz de receber solicitações externas, absorvê-las internamente e
transmiti-las até seus apoios, onde encontrarão seu sistema estático
equilibrante.
1.2. Força
A noção de força é das mais intuitivas possíveis: podemos exercer uma força
sobre um corpo por meio de um esforço muscular; uma locomotiva exerce força
sobre os vagões que ela reboca; uma mola esticada exerce forças sobre as peças
que fixam suas extremidades; etc. Em todos estes casos, O corpo que exerce a
força está em contato com aquele sobre o qual ela é exercida - tratam-se, pois,
de forças de contato.
Há, também, forças que atuam através do espaço, sem contato, chamadas,
por esta razão, forças de ação à distância - são as forças devidas à existência de
campos agindo sobre o corpo. É o caso das forças elétricas, magnéticas, das
forças de gravitação e, no caso da Terra, das forças devidas à gravidade (que são
os pesos dos corpos). Estas últimas serão as mais importantes da Análise
Estrutural
As forças são grandezas vetoriais, caracterizadas por direção, sentido e
intensidade.
No caso mais geral, que é o das forças situadas no espaço, elas ficam definidas
por um ponto de passagem e por suas componentes X, Y e Z segundo os eixos
triortogonais x, y. z, a partir das quais podemos expressá-las pela igualdade:
Página 4 de 47
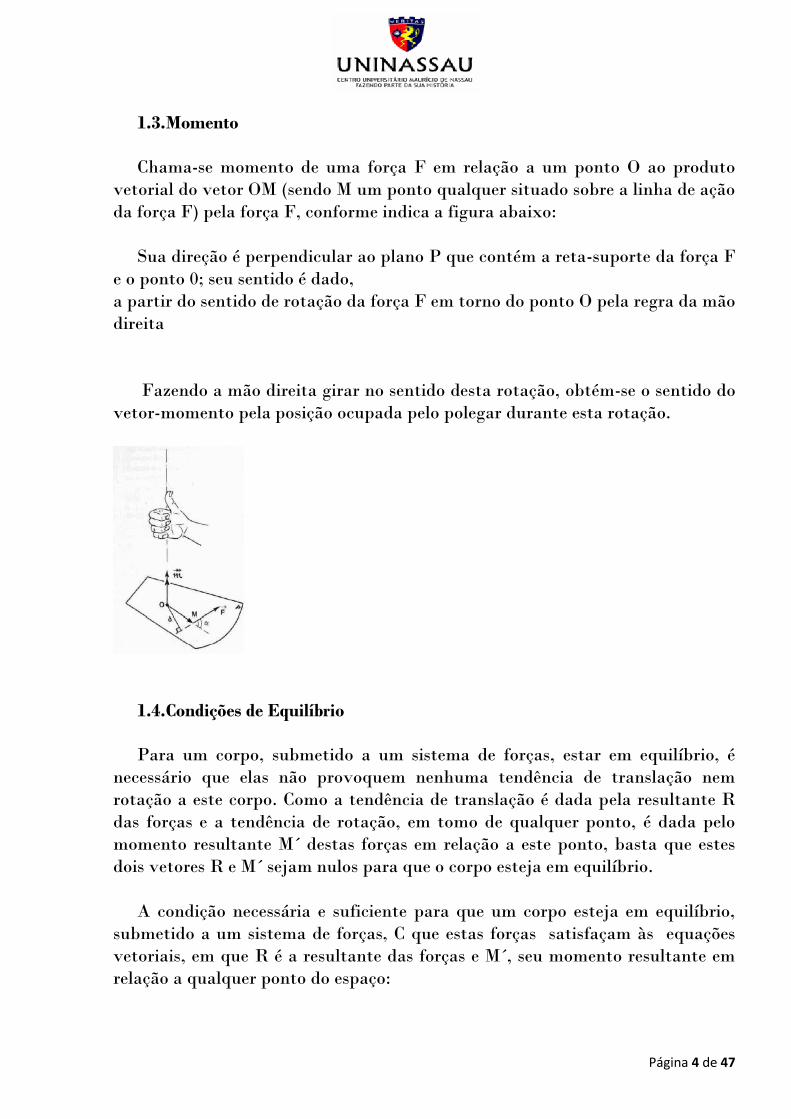
1.3. Momento
Chama-se momento de uma força F em relação a um ponto O ao produto
vetorial do vetor OM (sendo M um ponto qualquer situado sobre a linha de ação
da força F) pela força F, conforme indica a figura abaixo:
Sua direção é perpendicular ao plano P que contém a reta-suporte da força F
e o ponto 0; seu sentido é dado,
a partir do sentido de rotação da força F em torno do ponto O pela regra da mão
direita
Fazendo a mão direita girar no sentido desta rotação, obtém-se o sentido do
vetor-momento pela posição ocupada pelo polegar durante esta rotação.
1.4. Condições de Equilíbrio
Para um corpo, submetido a um sistema de forças, estar em equilíbrio, é
necessário que elas não provoquem nenhuma tendência de translação nem
rotação a este corpo. Como a tendência de translação é dada pela resultante R
das forças e a tendência de rotação, em tomo de qualquer ponto, é dada pelo
momento resultante M´ destas forças em relação a este ponto, basta que estes
dois vetores R e M´ sejam nulos para que o corpo esteja em equilíbrio.
A condição necessária e suficiente para que um corpo esteja em equilíbrio,
submetido a um sistema de forças, C que estas forças satisfaçam às equações
vetoriais, em que R é a resultante das forças e M´, seu momento resultante em
relação a qualquer ponto do espaço:
Página 5 de 47
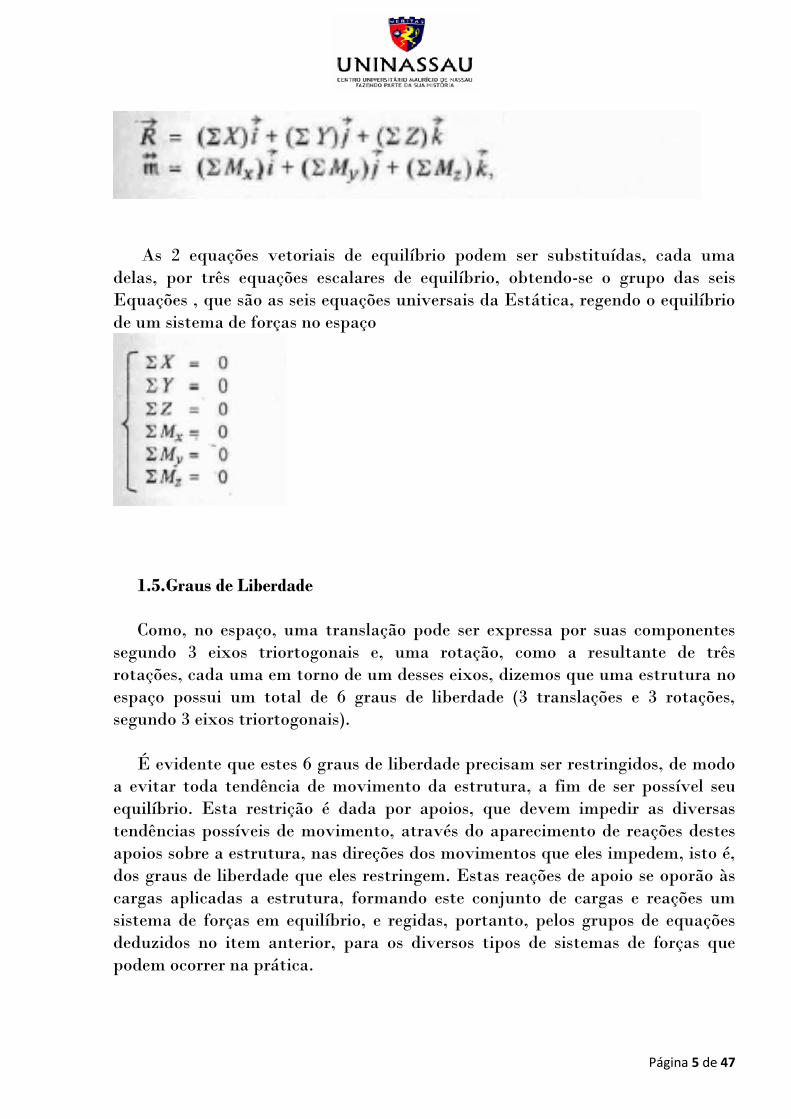
As 2 equações vetoriais de equilíbrio podem ser substituídas, cada uma
delas, por três equações escalares de equilíbrio, obtendo-se o grupo das seis
Equações , que são as seis equações universais da Estática, regendo o equilíbrio
de um sistema de forças no espaço
1.5. Graus de Liberdade
Como, no espaço, uma translação pode ser expressa por suas componentes
segundo 3 eixos triortogonais e, uma rotação, como a resultante de três
rotações, cada uma em torno de um desses eixos, dizemos que uma estrutura no
espaço possui um total de 6 graus de liberdade (3 translações e 3 rotações,
segundo 3 eixos triortogonais).
É evidente que estes 6 graus de liberdade precisam ser restringidos, de modo
a evitar toda tendência de movimento da estrutura, a fim de ser possível seu
equilíbrio. Esta restrição é dada por apoios, que devem impedir as diversas
tendências possíveis de movimento, através do aparecimento de reações destes
apoios sobre a estrutura, nas direções dos movimentos que eles impedem, isto é,
dos graus de liberdade que eles restringem. Estas reações de apoio se oporão às
cargas aplicadas a estrutura, formando este conjunto de cargas e reações um
sistema de forças em equilíbrio, e regidas, portanto, pelos grupos de equações
deduzidos no item anterior, para os diversos tipos de sistemas de forças que
podem ocorrer na prática.
Página 6 de 47
1.6. Apoios
A função dos apoios é restringir graus de liberdade das estruturas,
despertando com isto reações nas direções dos movimentos impedidos. Eles
serão classificados em função do número de graus de liberdade permitidos (ou do
número de movimentos impedidos), podendo ser, então, de 6 tipos diferentes
(isto é, podendo permitir 5,4,3,2, 1 ou nenhum grau de liberdade).
Para o caso das estruturas planas carregadas no próprio plano, que é o mais
frequente da Análise Estrutural, existem 3 graus de liberdade a combater.
São os seguintes os apoios utilizáveis para impedir estes movimentos:
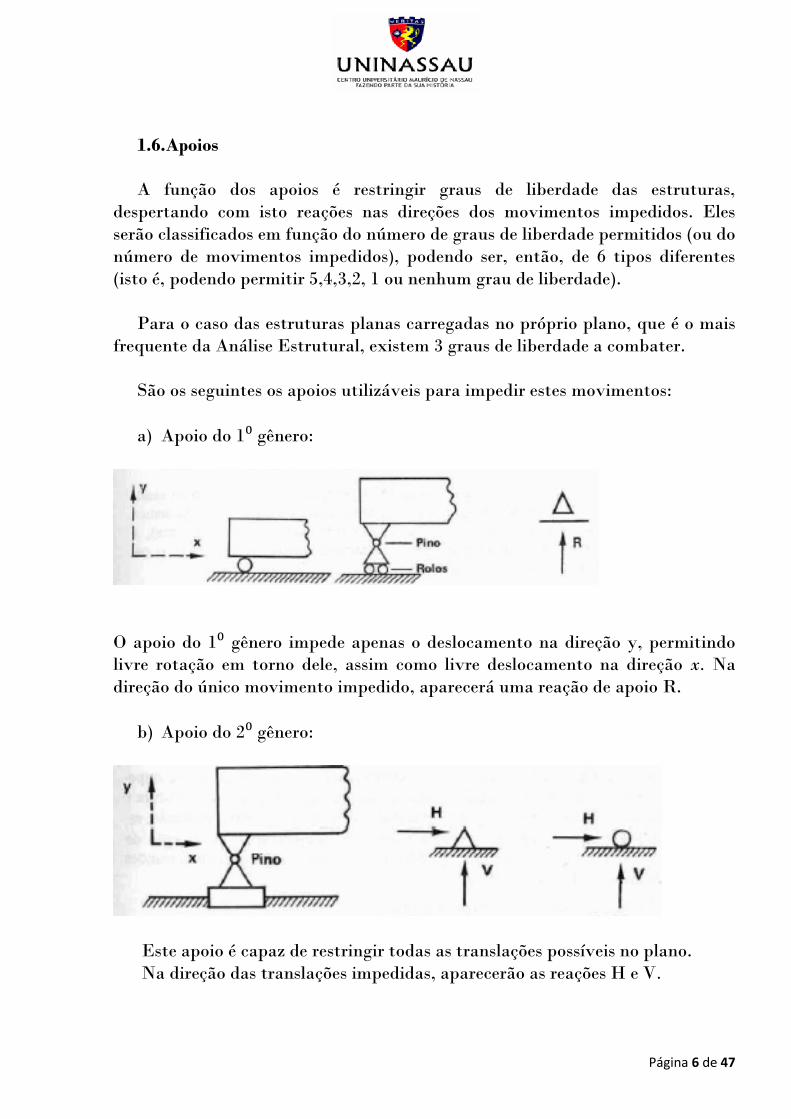
a) Apoio do 1⁰ gênero:
O apoio do 1⁰ gênero impede apenas o deslocamento na direção y, permitindo
livre rotação em torno dele, assim como livre deslocamento na direção x. Na
direção do único movimento impedido, aparecerá uma reação de apoio R.
b) Apoio do 2⁰ gênero:
Este apoio é capaz de restringir todas as translações possíveis no plano.
Na direção das translações impedidas, aparecerão as reações H e V.

Página 7 de 47
c) Apoio do 3⁰ gênero:
Todos os movimentos possíveis da estrutura estão impedidos e dizemos
então que o apoio engasta a estrutura. Em um engaste aparecem na direção de
cada um dos 3 movimentos impedidos (2 translações e 1 rotação), as reações de
apoio H, V e M indicadas.
1.7. Estaticidade e Estabilidade
A função dos apoios é limitar os graus de liberdade de uma estrutura.
Três casos podem então ocorrer:
a) Os apoios são em número estritamente necessário para impedir todos os
movimentos possíveis da estrutura.
Neste caso, o número de reações de apoio a determinar é igual ao número de
equações de equilíbrio disponíveis (isto é: número de incógnitas = número de
equações), chegando-se a um sistema de equações determinado que resolverá o
problema.
Diremos, então, que a estrutura é isostática, ocorrendo uma situação de
equilíbrio estável.
b) Os apoios são em número inferior ao necessário para impedir todos os
movimentos possíveis da estrutura.
Neste caso, evidentemente, teremos mais equações que incógnitas, chegando-
se a um sistema de equações impossível, nos casos gerais.
Pode ocorrer uma situação de carregamento tal que o próprio carregamento
consiga impedir os graus de liberdade que os apoios não forem capazes de
impedir; qualquer que seja a deformação imposta à estrutura, ela tenderá a
prosseguir até a sua ruína.
Diremos, então, que a estrutura é hipostática, ocorrendo uma situação de
equilíbrio instável.
As estruturas hipostáticas são, então, inadmissíveis para as construções.

Página 8 de 47
c) Os apoios são em número superior ao necessário para impedir todos os
movimentos possíveis da estrutura.
Neste caso, haverá menor número de equações que de incógnitas, conduzindo
a um sistema indeterminado. As equações universais da Estática não serão,
então, suficientes para a determinação das reações de apoio, sendo necessárias
equações adicionais de compatibilidade de deformações.
Diz-se, então, que a estrutura é hiperestática, ocorrendo uma situação de
equilíbrio estável. (aliás, pode-se dizer, um pouco impropriamente, que o
equilíbrio é mais que estável).
Capítulo 2 ESFORÇOS
2.1. Esforços Simples
Um sistema de forças, atuando sobre um corpo, encontra seu equilíbrio
através das reações de apoio que provocam. Vejamos, agora, quais os efeitos
estáticos que estas cargas e reações provocam em cada uma das seções do corpo.
Seccionemos o corpo por um plano P, que o intercepta segundo uma seção
S, dividindo-o nas duas partes D e E indicadas na figura abaixo:
A resultante R que atua na parte da esquerda foi obtida pelas forças da
direita, e vice-versa; o momento resultante M que atua na parte da esquerda foi
obtido pelas forças da direita, e vice-versa.
Página 9 de 47
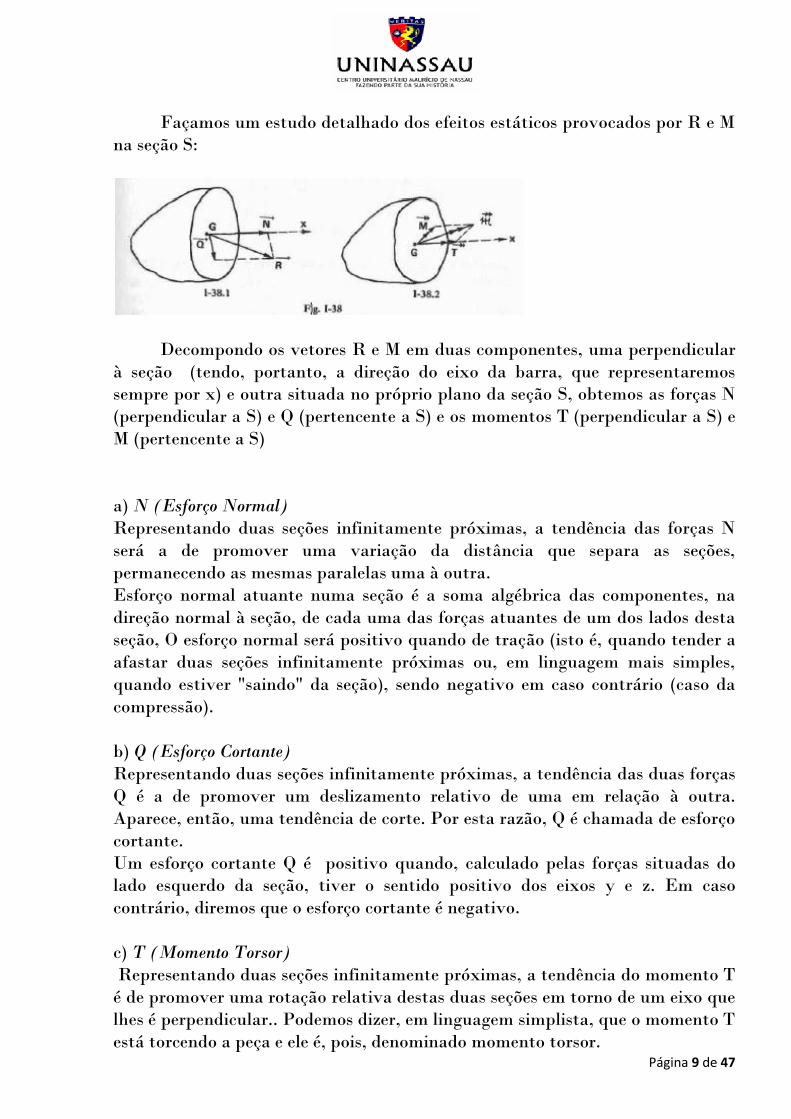
Façamos um estudo detalhado dos efeitos estáticos provocados por R e M
na seção S:
Decompondo os vetores R e M em duas componentes, uma perpendicular
à seção (tendo, portanto, a direção do eixo da barra, que representaremos
sempre por x) e outra situada no próprio plano da seção S, obtemos as forças N
(perpendicular a S) e Q (pertencente a S) e os momentos T (perpendicular a S) e
M (pertencente a S)
a) N (Esforço Normal)
Representando duas seções infinitamente próximas, a tendência das forças N
será a de promover uma variação da distância que separa as seções,
permanecendo as mesmas paralelas uma à outra.
Esforço normal atuante numa seção é a soma algébrica das componentes, na
direção normal à seção, de cada uma das forças atuantes de um dos lados desta
seção, O esforço normal será positivo quando de tração (isto é, quando tender a
afastar duas seções infinitamente próximas ou, em linguagem mais simples,
quando estiver "saindo" da seção), sendo negativo em caso contrário (caso da
compressão).
b) Q (Esforço Cortante)
Representando duas seções infinitamente próximas, a tendência das duas forças
Q é a de promover um deslizamento relativo de uma em relação à outra.
Aparece, então, uma tendência de corte. Por esta razão, Q é chamada de esforço
cortante.
Um esforço cortante Q é positivo quando, calculado pelas forças situadas do
lado esquerdo da seção, tiver o sentido positivo dos eixos y e z. Em caso
contrário, diremos que o esforço cortante é negativo.
c) T (Momento Torsor)
Representando duas seções infinitamente próximas, a tendência do momento T
é de promover uma rotação relativa destas duas seções em torno de um eixo que
lhes é perpendicular.. Podemos dizer, em linguagem simplista, que o momento T
está torcendo a peça e ele é, pois, denominado momento torsor.

Página 10 de 47
Diremos que um momento torsor T positivo quando traciona a seção em
questão, sendo negativo em caso contrário.
d) M (Momento Fletor)
Representando duas seções infinitamente próximas, a tendência do momento M,
conforme a regra da mão direita, é a de provocar uma rotação da seção em torno
de um eixo situado no seu próprio plano.
M provoca uma tendência de alongamento em uma das partes da seção e
uma tendência de encurtamento na outra parte. A peça ficará então fletida,
sendo, por isto, denominado de momento fletor.
Para o momento fletor, desejamos sempre conhecer que fibras estão
tracionadas e que fibras estão comprimidas (para, no caso das vigas de concreto
amado, por exemplo, sabemos de que lado devemos colocar as barras de aço,
que são o elemento resistente à tração).
Capítulo 3 ESTUDO DAS VIGAS ISOSTÁTICAS
3.1. Vigas Biapoiadas Simples
Seja a viga biapoiada simples submetida ao carregamento indicado:
Os esforços simples numa determina seção S são dados por:

Página 11 de 47
Derivando as expressões acima em relação à abscissa s que define a seção,
obtemos :
Demonstramos, então, que a derivada do momento fletor atuante numa
seção S de uma viga reta, submetida a um carregamento a ela perpendicular, em
relação à abscissa que define esta seção é igual ao esforço cortante nela atuante
e que a derivada deste em relação a esta abscissa é igual ao valor da taxa de
carga aplicada na seção S com o sinal trocado. As igualdade (II.1) e (II.2) são as
equações fundamentais da Estática, pois nos permitem obter os esforços
solicitantes nas diversas seções da viga em função do carregamento q(x)
atuante.
A partir de q(x) obteremos, então, as funções MS e QS que nos dão os
valores dos momentos fletores e esforços cortantes atuantes em qualquer seção
da viga. Representando graficamente estas funções MS e QS
perpendicularmente ao eixo da viga, teremos seus assim chamados diagramas de

Página 12 de 47
momentos fletores e de esforços cortantes atuantes, utilizados para os diversos
tipos de carregamentos que ocorrem na prática.
Adotando-se como positivo o carregamento distribuído de cima para
baixo (o que é usual), obtemos que um esforço cortante é positivo quando,
calculado pelas forças da esquerda, der para cima (ou, quando calculado pelas
forças da direita,der para baixo) e que um momento fletor é positivo quando
tracionar as fibras inferiores da viga. Tais são as convenções de sinais que
adotaremos.
Exemplo 3.1. Determinar as expressões de Q e M e construir os respectivos
diagramas na viga biapoiada, solicitada pela ação da carga concentrada P = 75
tf, conforme mostra a figura. Considere a = 3m e b=6m.
Exemplo 3.2. Determinar as expressões de Q e M e construir os respectivos
diagramas na viga biapoiada solicitada pela ação da carga distribuída de
intensidade q = 8tf/m, conforme mostra a figura. Considere l = 12m.
Página 13 de 47
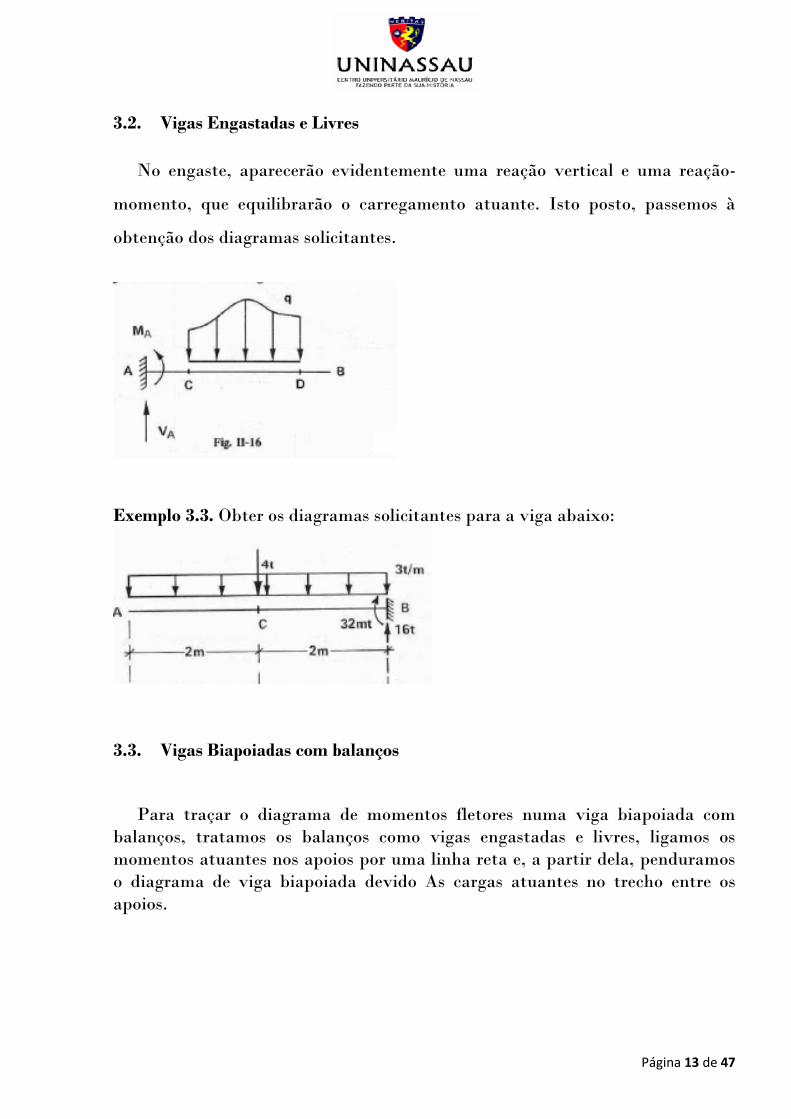
3.2. Vigas Engastadas e Livres
No engaste, aparecerão evidentemente uma reação vertical e uma reação-
momento, que equilibrarão o carregamento atuante. Isto posto, passemos à
obtenção dos diagramas solicitantes.
Exemplo 3.3. Obter os diagramas solicitantes para a viga abaixo:
3.3. Vigas Biapoiadas com balanços
Para traçar o diagrama de momentos fletores numa viga biapoiada com
balanços, tratamos os balanços como vigas engastadas e livres, ligamos os
momentos atuantes nos apoios por uma linha reta e, a partir dela, penduramos
o diagrama de viga biapoiada devido As cargas atuantes no trecho entre os
apoios.
Página 14 de 47
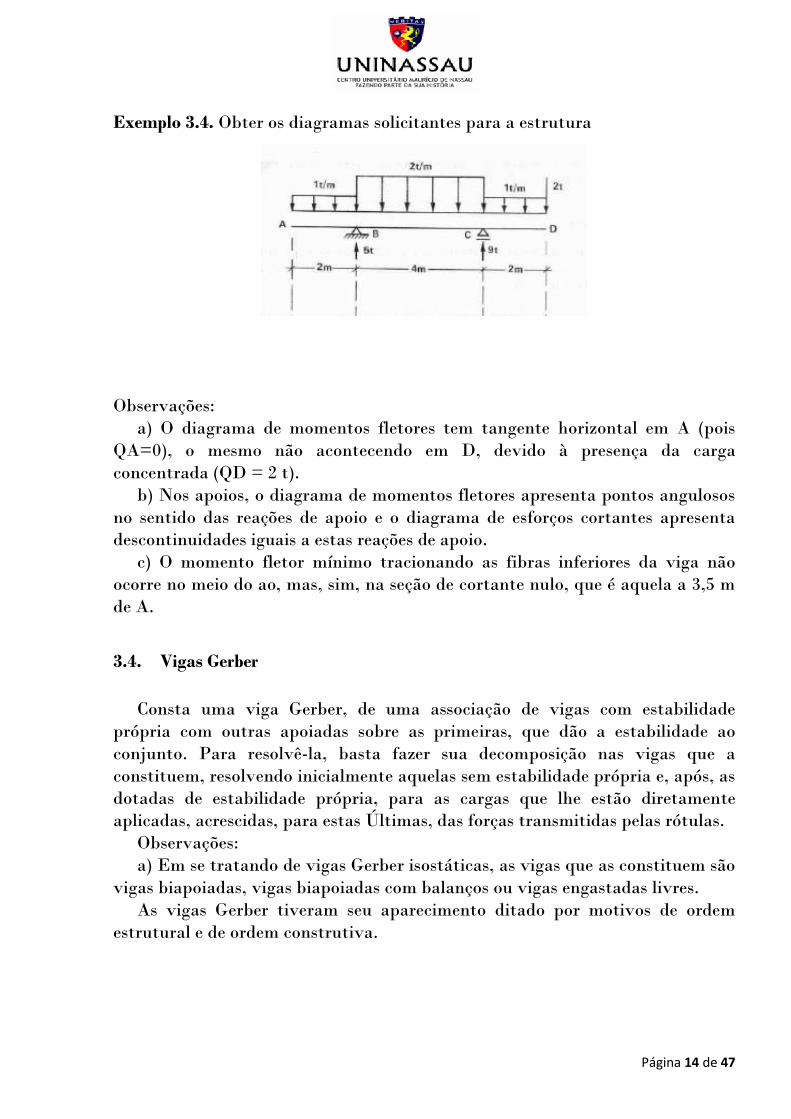
Exemplo 3.4. Obter os diagramas solicitantes para a estrutura
Observações:
a) O diagrama de momentos fletores tem tangente horizontal em A (pois
QA=0), o mesmo não acontecendo em D, devido à presença da carga
concentrada (QD = 2 t).
b) Nos apoios, o diagrama de momentos fletores apresenta pontos angulosos
no sentido das reações de apoio e o diagrama de esforços cortantes apresenta
descontinuidades iguais a estas reações de apoio.
c) O momento fletor mínimo tracionando as fibras inferiores da viga não
ocorre no meio do ao, mas, sim, na seção de cortante nulo, que é aquela a 3,5 m
de A.
3.4. Vigas Gerber
Consta uma viga Gerber, de uma associação de vigas com estabilidade
própria com outras apoiadas sobre as primeiras, que dão a estabilidade ao
conjunto. Para resolvê-la, basta fazer sua decomposição nas vigas que a
constituem, resolvendo inicialmente aquelas sem estabilidade própria e, após, as
dotadas de estabilidade própria, para as cargas que lhe estão diretamente
aplicadas, acrescidas, para estas Últimas, das forças transmitidas pelas rótulas.
Observações:
a) Em se tratando de vigas Gerber isostáticas, as vigas que as constituem são
vigas biapoiadas, vigas biapoiadas com balanços ou vigas engastadas livres.
As vigas Gerber tiveram seu aparecimento ditado por motivos de ordem
estrutural e de ordem construtiva.

Página 15 de 47
Suponhamos que o objetivo é construir uma ponte de concreto, que deverá se
apoiar sobre pilares A, B, C, D, escolhendo uma das duas soluções indicadas nas
figuras acima.
Para a execução da superestrutura da ponte, seríamos obrigados a escorar
simultaneamente todo o volume compreendido sob o tabuleiro da ponte,
escoramento este que, dependendo da velocidade do rio e de sua profundidade,
pode tomar-se extremamente difícil, caro e, até mesmo, arriscado no trecho BC.
Esta solução permite a execução em separado dos trechos ABE, EF, FCD,
com o que poderíamos escorar inicialmente o trecho ABE e concretá-lo; a seguir,
transferiríamos o escoramento para o trecho FCD que seria posteriormente
concretado e, finalmente, usando os próprios trechos ABE e FCD, já
executados, como apoios, concretaríamos a vigota EF, encerrando a execução
da estrutura (poderíamos, também, pré-fabricar a viga EF, lançando-a através
de uma treliça).
Não resta a menor dúvida que, sob o ponto de vista construtivo, a segunda
solução será mais adequada no caso, pois não envolverá risco algum no vão BC
durante a construção, além de reduzir o volume de material para escoramento a
quase 1/3 do necessário para a primeira solução.
A solução trará ainda, sob o ponto de vista estrutural, a vantagem de reduzir
as forças horizontais nos pilares devidas a variações de temperatura e à retração

Página 16 de 47
do concreto (a este respeito, não teceremos maiores considerações por ora, pois
este tema é objeto de estudo nas cadeiras de Pontes).
As vigas Gerber têm lugar de grande Importância na Engenharia Estrutural,
e a tendência desta importância é aumentar, tendo em vista o desenvolvimento
das técnicas de pré-fabricação e montagem de estruturas.
Exemplo 3.5. Obter os diagramas solicitantes para a viga abaixo:
Capítulo 4 ESTUDO DOS QUADROS ISOSTÁTICOS
Existem quatro tipos fundamentais de quadros isostáticos planos, aos
quais chamamos de quadros simples, quando ocorrem isoladamente e que,
associados entre si, da mesma forma que associamos vigas simples para
constituir vigas Gerber, formam os chamados quadros compostos, que não serão
estudados neste curso.
Exemplo 4.1. Seja o quadro biapoiado ilustrado abaixo para o qual se
deseja obter as reações de apoio HA , VA e VB .

Página 17 de 47
Capítulo 5 PROPRIEDADES DAS SUPERFÍCIES PLANAS
Ao analisarmos a distribuição de forças ou tensões em elementos
estruturais, como vigas e seções transversais, é comum encontramos um tipo de
integral que relaciona o quadrado da posição com o elemento de área. Essa
integral é chamada Momento de Inércia ou Momento de Segunda Ordem, tal
que o momento de inércia tem usos na análise estrutural, mecânica dos fluidos
entre outros. Para exemplificar, vamos considerar uma viga sob ação de
momento M e tensão, tal que as forças aplicadas estão comprimindo a viga,
conforme mostrado na figura.
5.1. Momento de Inércia I (Momento de 2ª Ordem)
O momento de inércia de uma superfície plana em relação a um eixo de
referência é definido através da integral de área dos produtos entre os
infinitésimos da área que compõem a superfície e suas respectivas distâncias ao
eixo de referência elevadas ao quadrado.
O momento de inércia é uma característica importantíssima no
dimensionamento dos elementos de construção, pois fornece através de valores
numéricos, uma noção de resistência da peça. Quanto maior for o momento de
inércia da seção transversal de uma peça, maior será a resistência da peça.

Página 18 de 47
5.2. Teorema dos eixos paralelos para uma área
Se o momento de inércia de uma área em torno de um eixo centroide for
conhecido, poderemos determinar o momento de inércia em torno de um eixo
paralelo correspondente por meio do teorema dos eixos paralelos. Para deduzir
esse teorema, considere a determinação do momento de inércia em torno do eixo
x da área mostrada na figura abaixo. Nesse caso, um elemento diferencial dA
está localizado a uma distância arbitrária y´ do eixo centroide x´, ao passo que a
distância fica entre os eixos paralelos x e x´ é definida como dy. Visto que o
momento de inércia dA em torno do eixo x é dIx = (y´+dy)2dA, então, para a
área inteira,
O primeiro termo do lado direito representa o momento de inércia da área
em torno do eixo x´, Ix´.
O segundo termo é zero, visto que o eixo x´ passa pelo centroide da área C,
isto é, ∫y´dA= A =0, já que =0. Portanto, o resultado final é

Página 19 de 47
Uma expressão semelhante pode ser escrita para Iy, isto é,
A forma de cada uma dessas equações estipula que o momento de inércia
em torno de um eixo é igual ao momento de inércia em torno de um eixo
paralelo que passa pelo centroide mais o produto entre a área e o quadrado da
distância perpendicular entre os eixos.
Secção Momento de
Inércia
Secção Momento de
Inércia
Tabela 1 – Momentos de Inércia de áreas planas comuns
5.3. Lei de Hooke
O diagrama tensão-deformação para a maioria dos materiais de
engenharia exibe uma relação linear entre tensão e deformação dentro da região
elástica. Por consequência, um aumento na tensão provoca um aumento
proporcional na deformação. Esse fato foi descoberto por Robert Hooke, em
1676, para molas, e é conhecido como lei de Hooke e pode ser expresso
matematicamente como:
Onde:
σ é a tensão em N/mm2 (ou MPa)
é o módulo de elasticidade do material em MPa
Ɛ é a deformação da peça em mm/mm
Página 20 de 47
Lista de Exercícios – 1ª Unidade:
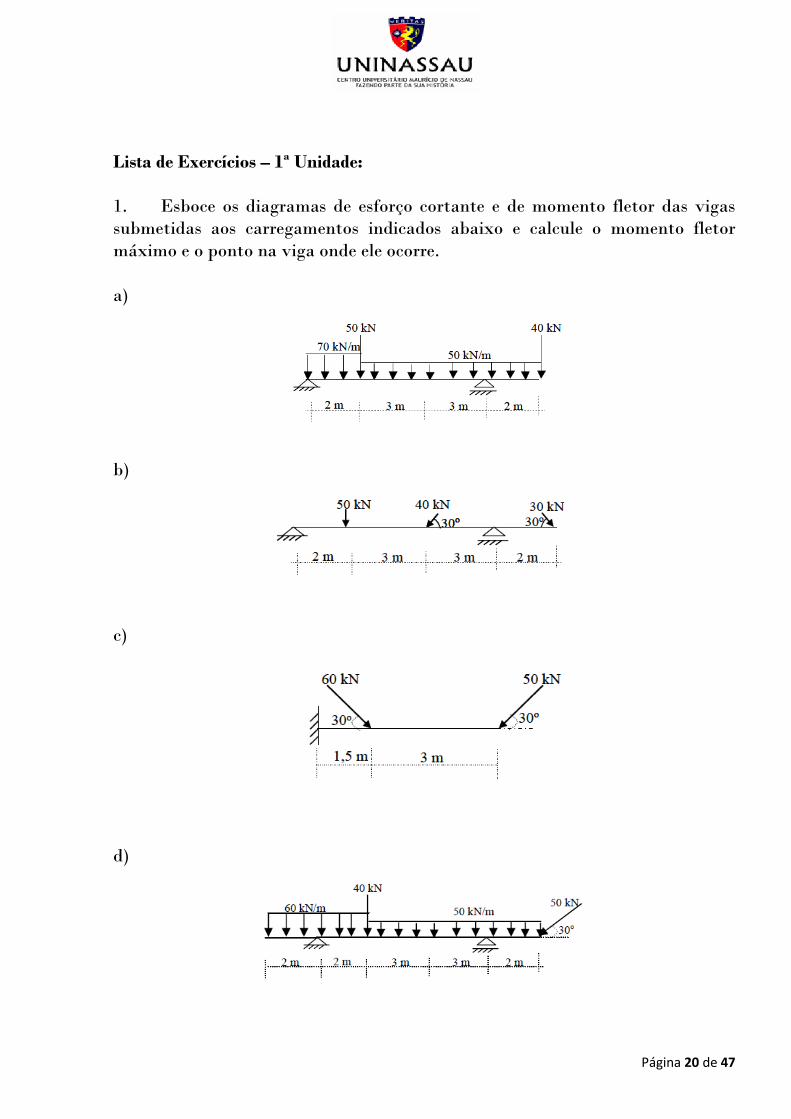
1. Esboce os diagramas de esforço cortante e de momento fletor das vigas
submetidas aos carregamentos indicados abaixo e calcule o momento fletor
máximo e o ponto na viga onde ele ocorre.
a)
b)
c)
d)
Página 21 de 47
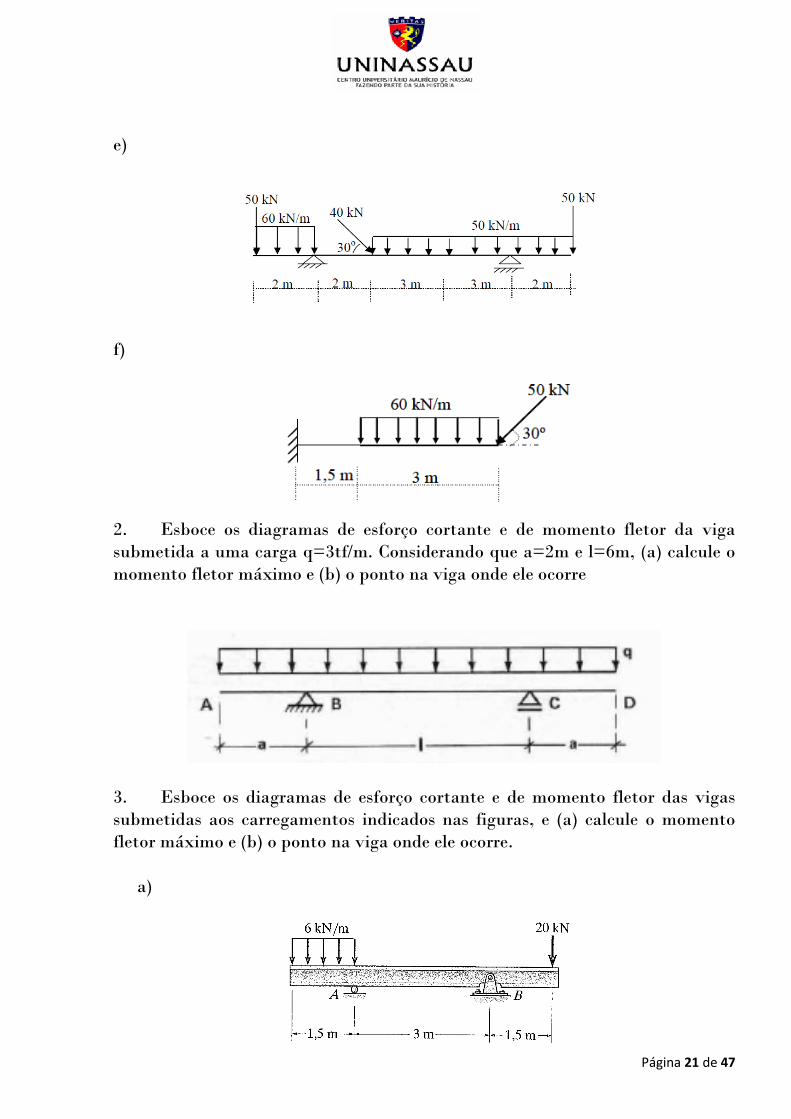
e)
f)
2. Esboce os diagramas de esforço cortante e de momento fletor da viga
submetida a uma carga q=3tf/m. Considerando que a=2m e l=6m, (a) calcule o
momento fletor máximo e (b) o ponto na viga onde ele ocorre
3. Esboce os diagramas de esforço cortante e de momento fletor das vigas
submetidas aos carregamentos indicados nas figuras, e (a) calcule o momento
fletor máximo e (b) o ponto na viga onde ele ocorre.
a)

Página 22 de 47
b)
c)
4. Calcule o valor de x para a viga ilustrada abaixo, de modo que ela fique
submetida aos momentos fletores menores possíveis.
Página 23 de 47
Capítulo 6 DEFORMAÇÃO EM ELEMENTOS RETOS
6.1. Deformações por Flexão
A equação que relaciona a distribuição de tensão longitudinal em uma
viga e o momento fletor interno resultante que age na seção transversal se
comporta de uma maneira linear elástica, onde se pode aplicar a Lei de Hooke.
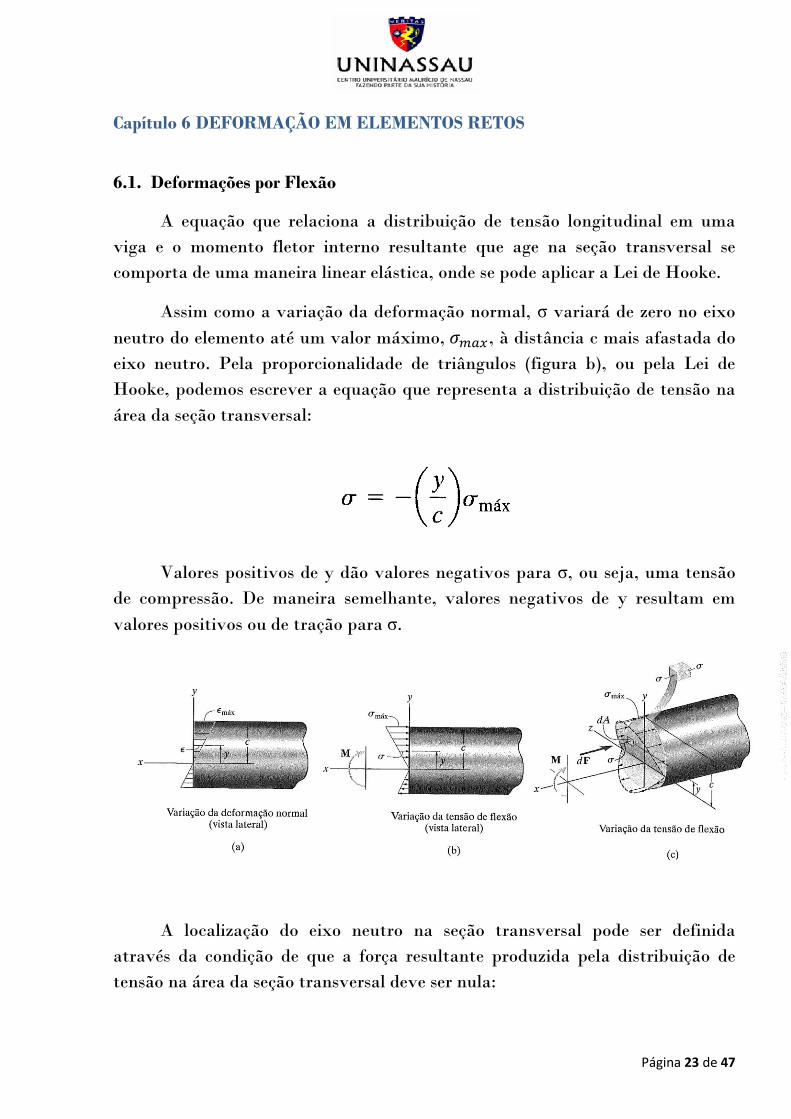
Assim como a variação da deformação normal, σ variará de zero no eixo
neutro do elemento até um valor máximo, , à distância c mais afastada do
eixo neutro. Pela proporcionalidade de triângulos (figura b), ou pela Lei de
Hooke, podemos escrever a equação que representa a distribuição de tensão na
área da seção transversal:
Valores positivos de y dão valores negativos para σ, ou seja, uma tensão
de compressão. De maneira semelhante, valores negativos de y resultam em
valores positivos ou de tração para σ.
A localização do eixo neutro na seção transversal pode ser definida
através da condição de que a força resultante produzida pela distribuição de
tensão na área da seção transversal deve ser nula:

Página 24 de 47
Como /c não é igual a zero, então:
Isto quer dizer que o momento de primeira ordem da área da seção
transversal do elemento em torno do eixo neutro deve ser nulo. Essa condição só
pode ser satisfeita se o eixo neutro também for o eixo do centroide horizontal
para a seção transversal analisada. Como consequência, uma vez determinado o
centroide para a área da seção transversal do elemento, a localização do eixo
neutro é conhecida.
Isto se deve ao fato de que a localização para o centroide da área da
seção transversal é definida pela equação ∫ydA/∫dA. Se ∫ydA=0, então,
e, portanto, o centroide encontra-se no eixo de referência (neutro).
Pode-se determinar a tensão na viga pelo fato de que o momento interno
resultante M deve ser igual ao momento produzido pela distribuição de tensão
em torno do eixo neutro. O momento de dF na figura c será, então, igual a
Como , tem-se que

Página 25 de 47
ou
Na expressão acima, a integral representa o momento de inércia I da seção
transversal, calculada em torno do eixo neutro.
Ela pode ser escrita na forma geral como:
= tensão normal máxima no elemento, que ocorre em um ponto na área da
seção transversal mais afastado do eixo neutro.
= momento interno resultante, determinado pelo método das seções e pelas
equações de equilíbrio e calculado em torno do eixo neutro da seção
transversal.
= momento de inércia da seção transversal calculada em torno do eixo neutro
= distância perpendicular do eixo neutro a um ponto mais afastado do eixo
neutro onde age.
A tensão normal a uma distância intermediária y pode ser determinada
por uma equação semelhante:
Página 26 de 47
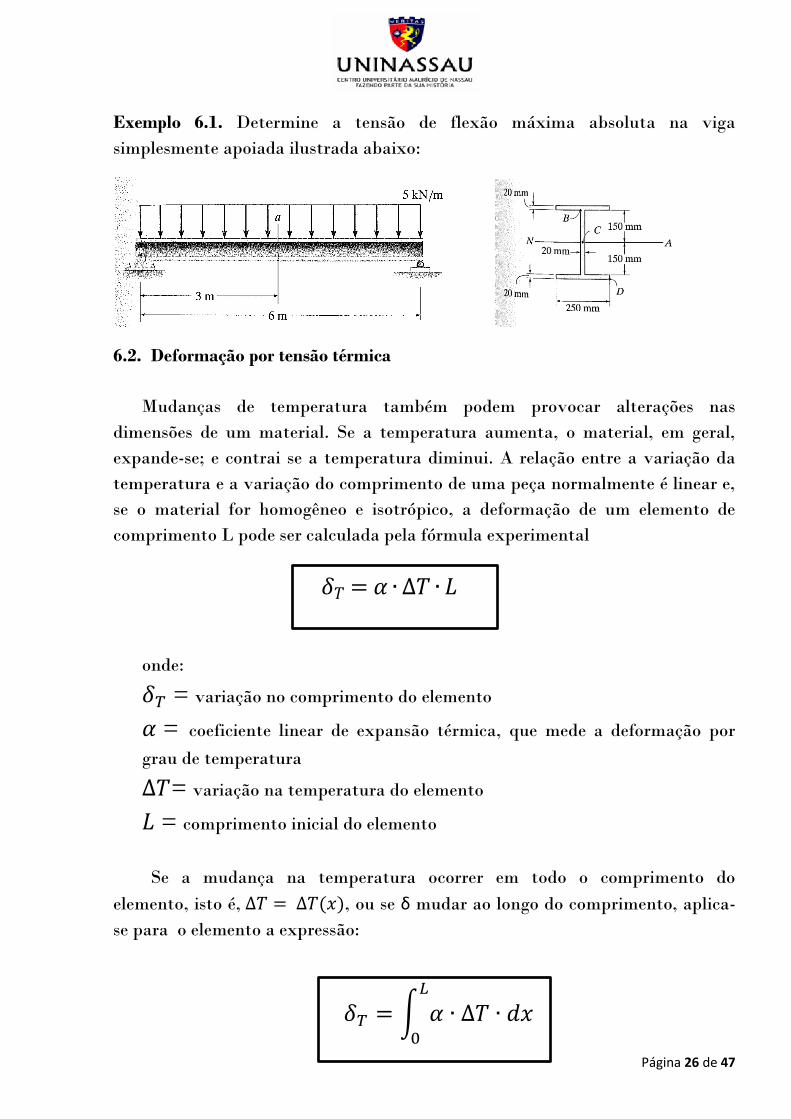
Exemplo 6.1. Determine a tensão de flexão máxima absoluta na viga
simplesmente apoiada ilustrada abaixo:
6.2. Deformação por tensão térmica
Mudanças de temperatura também podem provocar alterações nas
dimensões de um material. Se a temperatura aumenta, o material, em geral,
expande-se; e contrai se a temperatura diminui. A relação entre a variação da
temperatura e a variação do comprimento de uma peça normalmente é linear e,
se o material for homogêneo e isotrópico, a deformação de um elemento de
comprimento L pode ser calculada pela fórmula experimental
onde:
= variação no comprimento do elemento
= coeficiente linear de expansão térmica, que mede a deformação por
grau de temperatura
= variação na temperatura do elemento
= comprimento inicial do elemento
Se a mudança na temperatura ocorrer em todo o comprimento do
elemento, isto é, , ou se δ mudar ao longo do comprimento, aplica-
se para o elemento a expressão:
∫

Página 27 de 47
Capítulo 7 DEFORMAÇÃO POR FLEXÃO EM VIGAS COMPOSTAS
Vigas Compostas são constituídas de dois ou mais materiais diferentes,
projetadas para desenvolver um meio mais eficiente de suportar cargas
aplicadas.
A fórmula de flexão foi desenvolvida para vigas de material homogêneo e
não pode ser aplicada diretamente para determinar a tensão normal em uma
viga composta.
7.1. Método da seção transformada
Considere uma viga composta de dois materiais, 1 e 2, com áreas de seção
transversal mostradas na figura abaixo.
Cada material apresenta comportamento linear elástico (lei de Hooke). Para
cada material, a tensão normal é dada por:
e
Se o material 1 for mais rígido do que o material 2, então E1 > E2.
O modo de cálculo: transformar a viga em outra inteiramente do material 2,
menos rígido, mantendo-se a altura h já que a tensão de deformação deve ser
preservada. Entretanto, a parte superior da viga deve ser alargada, de modo a
suportar uma carga equivalente à suportada pelo material, mais rígido.
A largura necessária é determinada considerando a força dF que age em uma
área dA= dz dy da viga. Essa força é
dF= σ dA = (E1Ɛ) dzdy

Página 28 de 47
Por outro lado, se a largura de um elemento correspondente de altura dy for
ndz, então
dF´= σ´ dA´ = (E2Ɛ) ndzdy
Igualando as duas forças, temos:
Ou seja:
O número adimensional n é chamado fator de transformação e indica que a
seção transversal com largura b na viga original deve ser aumentada na
largura para b2=nb na região onde o material 1 está sendo transformado no
material 2
Exemplo 7.1. Uma viga composta é feita de madeira e reforçada com uma tira
de aço localizada em sua parte inferior. Ela tem a área de seção transversal
mostrada na figura abaixo. Se for submetida a um momento fletor M = 2kN•m,
determine a tensão normal nos pontos B e C. Considere Eaço = 200GPa e Emad =
12GPa.
(E1• Ɛ ) dz dy = (E2• Ɛ ) n dz dy
Página 29 de 47
7.2. Método da Seção Transformada para Vigas de Concreto Armado
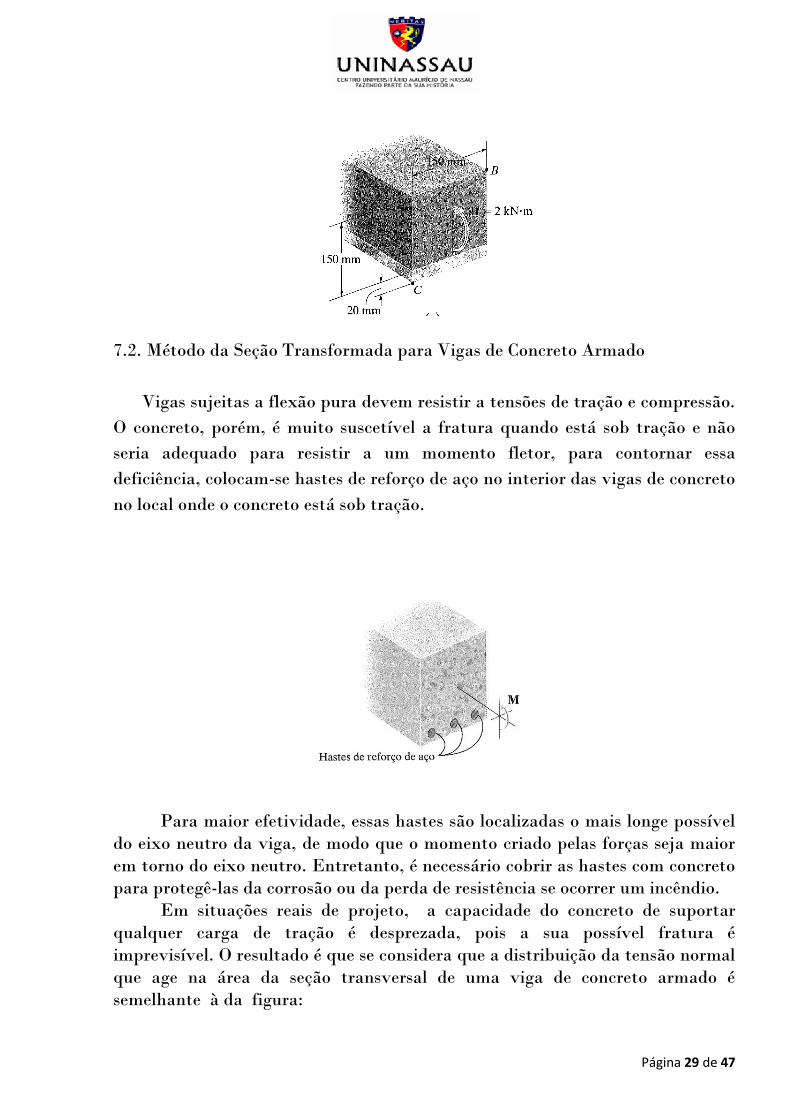
Vigas sujeitas a flexão pura devem resistir a tensões de tração e compressão.
O concreto, porém, é muito suscetível a fratura quando está sob tração e não
seria adequado para resistir a um momento fletor, para contornar essa
deficiência, colocam-se hastes de reforço de aço no interior das vigas de concreto
no local onde o concreto está sob tração.
Para maior efetividade, essas hastes são localizadas o mais longe possível
do eixo neutro da viga, de modo que o momento criado pelas forças seja maior
em torno do eixo neutro. Entretanto, é necessário cobrir as hastes com concreto
para protegê-las da corrosão ou da perda de resistência se ocorrer um incêndio.
Em situações reais de projeto, a capacidade do concreto de suportar
qualquer carga de tração é desprezada, pois a sua possível fratura é
imprevisível. O resultado é que se considera que a distribuição da tensão normal
que age na área da seção transversal de uma viga de concreto armado é
semelhante à da figura:

Página 30 de 47
A análise requer descobrir a linha neutra e a tensão máxima no aço e no
concreto.
Em primeiro lugar, a área de aço Aaço é transformada em uma área
equivalente de concreto, usando o fator de transformação
A área transformada é nAço e a seção transformada é semelhante à mostrada na
figura:
d = representa a distância entre a parte superior da viga e o aço transformado;
b = é a largura da viga;
h´ = é a distância entre a parte superior da viga e o eixo neutro
Pode-se obter h´ usando o fato de que o centroide C se encontra na linha
neutra, de maneira que o momento de primeira ordem das duas áreas deve ser
nulo, em referência à linha neutra.

Página 31 de 47
Uma vez obtida h´ por essa equação quadrática, a solução prossegue de
maneira usual para obter a tensão na viga.
Exemplo 7.2. A viga de concreto armado tem a área de seção transversal
mostrada na figura abaixo. Se for submetida a um momento fletor M = 60kN·
m, determine a tensão normal em cada uma das hastes de reforço de aço e a
tensão normal máxima no concreto. Considere Eaço = 200GPa e Econc = 25 GPa
Capítulo 8 TENSÕES NORMAIS – TRAÇÃO E COMPRESSÃO
A intensidade das forças F distribuídas sobre uma seção transversal A é
chamada de tensão e é representada pela letra grega σ (sigma):
A tensão então pode ser expressa em unidade de força por unidade de
área, sendo muito comum expressar-se em unidade MPa (megapascal),
equivalente a N/ mm2.
Os materiais oferecem resistência até determinado limite, chamada de
tensão admissível (σadm).

Página 32 de 47
Exemplo 8.1. Suponha que uma barra de alumínio está submetida a uma força
axial igual a P = 50kN. Sabendo que a tensão admissível na barra
σadm=100MPa, determine o diâmetro mínimo da barra.
Se a força normal ou tensão tracionar o elemento de área ∆A, ela será
denominada de tração, mas se ela comprimir o elemento ∆A, será denominada
de compressão.
Outra análise pode ser feita para a verificação dos efeitos de tração ou
compressão: a deformação das peças estruturais.
8.1. Deformação de Componentes sob Carregamento Axial
Uma barra homogênea BC de comprimento L e seção transversal uniforme
de área A está submetida a uma força axial centrada P. Se a tensão axial
resultante
não ultrapassa o limite de proporcionalidade (fase elástica do
material), podemos aplicar a lei de Hooke:
De onde se extrai:
Lembrando que
, tem-se enfim que

Página 33 de 47
Neste caso, quando a peça estará sofrendo um efeito de tração. E
o contrário, de compressão.
A expressão acima só pode ser utilizada se a barra for homogênea (E
constante), se tiver uma seção transversal uniforme (A constante), e se tiver a
força P aplicada em suas extremidades. Em casos diferentes dessas condições, a
deformação da barra inteira será:
No caso de uma barra de seção transversal variável, a deformação
específica depende da posição do ponto em que é calculada e definida como
, expressando a deformação de um elemento com comprimento dx igual
a :
Exemplo 8.2 Uma única força axial de intensidade P = 58kN é aplicada à
extremidade C da barra de latão ABC. Sabendo que E = 105 GPa, determine o
diâmetro d da parte BC para o qual o deslocamento do ponto c será 3mm.

Página 34 de 47
Capítulo 9 TENSÕES DE CISALHAMENTO
Ao se considerar uma barra submetida às forças axiais P e P´, o desenho
do diagrama de corpo livre da parte do componente localizado à esquerda da
seção do plano formado por um ângulo φ que corta a peça, encontramos pelas
condições de equilíbrio do corpo livre que as forças distribuídas agindo na seção
devem ser equivalentes à força P.
Decompondo P nas suas componentes F e V, respectivamente normal e
tangencial à seção, temos:
e
A força F representa a resultante das forças normais distribuídas sobre a
seção, e a força V, a resultante das forças tangenciais. Os valores médios das
tensões normal e de cisalhamento correspondentes são obtidos dividindo-se,
respectivamente, F e V, pela área Aθ da seção:
Substituindo F e V e observando que , ou ,
onde indica a área de uma seção perpendicular ao eixo do componente,
obtemos:
ou

Página 35 de 47
Notamos da primeira das equações que a tensão normal é máxima
quando θ=0, ou seja, quando o plano da seção é perpendicular ao eixo do
componente, e que ela se aproxima de zero à medida que θ se aproxima de 90º.
Neste caso,
Já a tensão de cisalhamento τ é zero para θ = 0 e θ=90º, e que para θ=45º
ele alcança seu valor máximo
Capítulo 10 TENSÕES DE TORÇÃO
A uma barra de seção circular presa a um suporte rígido em uma de suas
extremidades. Se na outra extremidade for aplicado um torque T, a barra
sofrerá rotação, com sua extremidade livre girando de um ângulo φ chamado
“ângulo de torção”.
Dentro de um determinado intervalo de valores de T, o ângulo de torção
φ é proporcional ao comprimento L da barra. Ou seja, o ângulo de torção para
uma barra de mesmo material e mesma seção transversal, mas duas vezes mais
longa, será duas vezes maior sob o mesmo torque T.

Página 36 de 47
Em barras circulares, deve-se notar que toda seção transversal plana
permanece plana e indeformada. Ou seja, várias seções transversais ao longo da
barra giram, mas como se fosse discos rígidos.
A deformação em uma barra circular devido ao torque é expressa pela
letra grega (gama), igual ao ângulo formado entre as linhas AB e A´B. ( é
expressa em radianos)
Para pequenos valores de , podemos expressar o comprimento do arco
AA´ como
E, como , segue-se:
onde são ambos expressos em radianos.
Assim, a deformação de cisalhamento em um dado ponto de uma barra
circular em torção é proporcional ao ângulo de torção . É também
proporcional à distância do eixo da barra até o ponto de consideração.
Página 37 de 47
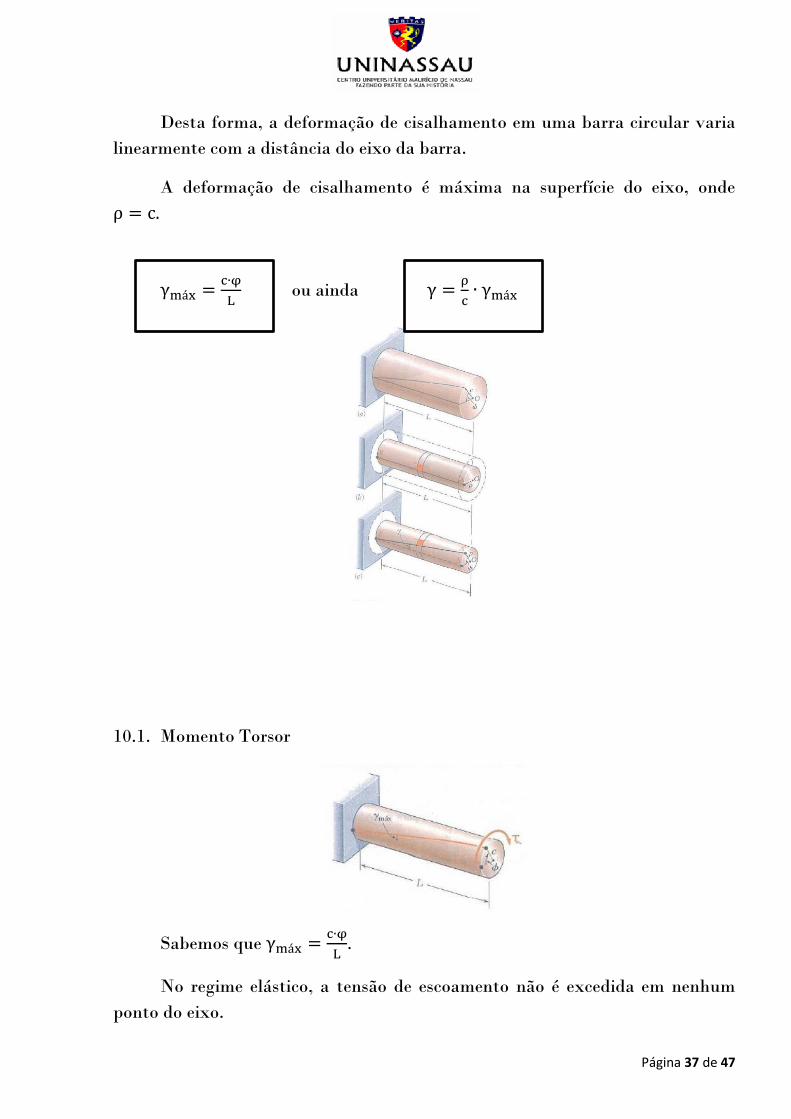
Desta forma, a deformação de cisalhamento em uma barra circular varia
linearmente com a distância do eixo da barra.
A deformação de cisalhamento é máxima na superfície do eixo, onde
ou ainda
10.1. Momento Torsor
Sabemos que
.
No regime elástico, a tensão de escoamento não é excedida em nenhum
ponto do eixo.

Página 38 de 47
Desta forma, pode-se aplicar a lei de Hooke da seguinte forma:
Usando:
, temos:
e enfim:

Página 39 de 47
Lista de Exercícios – 2ª Unidade:
1) O elemento com seção transversal retangular da figura (a) foi projetado
para resistir a um momento M = 40 Nm. Para aumentar sua resistência e
rigidez, foi proposta a adição de duas pequenas nervuras em sua parte inferior,
tal como ilustra a figura (b). Determine a tensão normal máxima no elemento
em ambos os casos
2) A haste de aço com diâmetro de 20mm está sujeita a um momento interno
M = 300Nm. Determine a tensão criada nos pontos A e B
3) A peça de mármore, que podemos considerar como um material linear
elástico frágil, tem peso específico de 24kN/m3 e espessura de 20mm. Calcule a
tensão de flexão máxima na peça se ela estiver apoiada (a) em seu lado e (b) em
suas bordas. Se a tensão de ruptura for σrup=1,5 MPa, explique as
consequências de apoiar a peça em cada uma das posições.

Página 40 de 47
4) Se a viga tiver seção quadrada de 225mm em cada lado, determine a
tensão de flexão máxima absoluta na viga.
5) A viga de concreto armado é feita com duas hastes de reforço de aço. Se a
tensão de tração admissível para o aço for (σaço)adm = 280 MPa e a tensão de
compressão admissível para o concreto for for (σconc)adm = 21 MPa, determine
o momento máximo M que pode ser aplicado à seção. Considere que o concreto
não pode suportar uma tensão de tração. Eaço= 200 GPa e Econc= 26,5 GPa.
Página 41 de 47
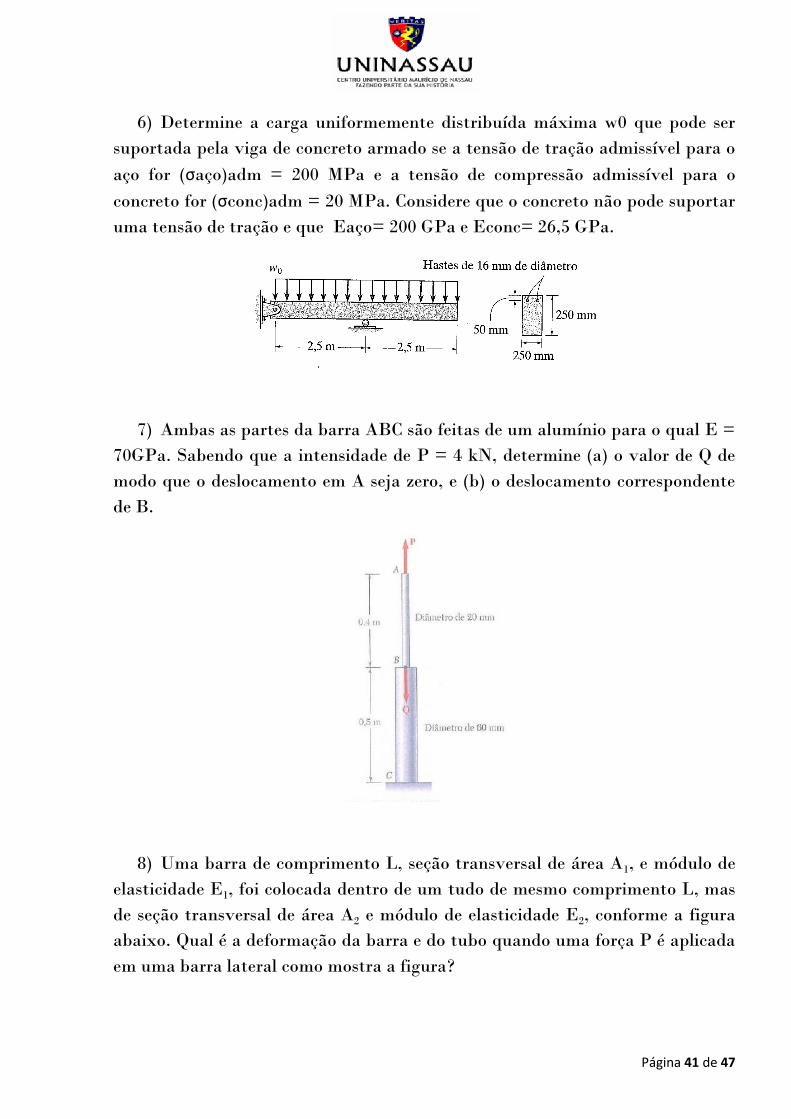
6) Determine a carga uniformemente distribuída máxima w0 que pode ser
suportada pela viga de concreto armado se a tensão de tração admissível para o
aço for (σaço)adm = 200 MPa e a tensão de compressão admissível para o
concreto for (σconc)adm = 20 MPa. Considere que o concreto não pode suportar
uma tensão de tração e que Eaço= 200 GPa e Econc= 26,5 GPa.
7) Ambas as partes da barra ABC são feitas de um alumínio para o qual E =
70GPa. Sabendo que a intensidade de P = 4 kN, determine (a) o valor de Q de
modo que o deslocamento em A seja zero, e (b) o deslocamento correspondente
de B.
8) Uma barra de comprimento L, seção transversal de área A1, e módulo de
elasticidade E1, foi colocada dentro de um tudo de mesmo comprimento L, mas
de seção transversal de área A2 e módulo de elasticidade E2, conforme a figura
abaixo. Qual é a deformação da barra e do tubo quando uma força P é aplicada
em uma barra lateral como mostra a figura?

Página 42 de 47
9) Uma carga axial de 40 kN é aplicada a uma coluna curta de madeira
suportada por uma base de concreto em solo estável. Determine (a) a tensão de
contato máxima na base de concreto, (b) o tamanho da base para o qual a
tensão de contato média no solo seja de 145kPa.
10) Dois elementos de madeira de seção transversal retangular uniforme
são unidos por uma emenda colada como mostra a figura. Sabendo que P =
11kN, determine as tensões normal e de cisalhamento na emenda colada.
11) Dois elementos de madeira de seção transversal retangular uniforme
são unidos por uma emenda colada como mostra a figura. Sabendo que a
máxima tensão de cisalhamento admissível na emenda é de 620kPa, determine

Página 43 de 47
(a) a maior carga P que pode ser aplicada com segurança e (b) a tensão de tração
correspondente na emenda.
12) A carga P de 6,0kN é suportada por dois elementos de madeira de
seção transversal uniforme unidos pela emenda colada mostrada na figura.
Determine as tensões normal e de cisalhamento na emenda colada.
13) Dois elementos de madeira de seção transversal retangular uniforme
são unidos por uma emenda colada como mostra a figura. Sabendo que a
máxima tensão de tração admissível na emenda é 500kPa, determine (a) a maior
carga P que pode ser suportada com segurança e (b) a tensão de cisalhamento
correspondente na emenda.
Página 44 de 47
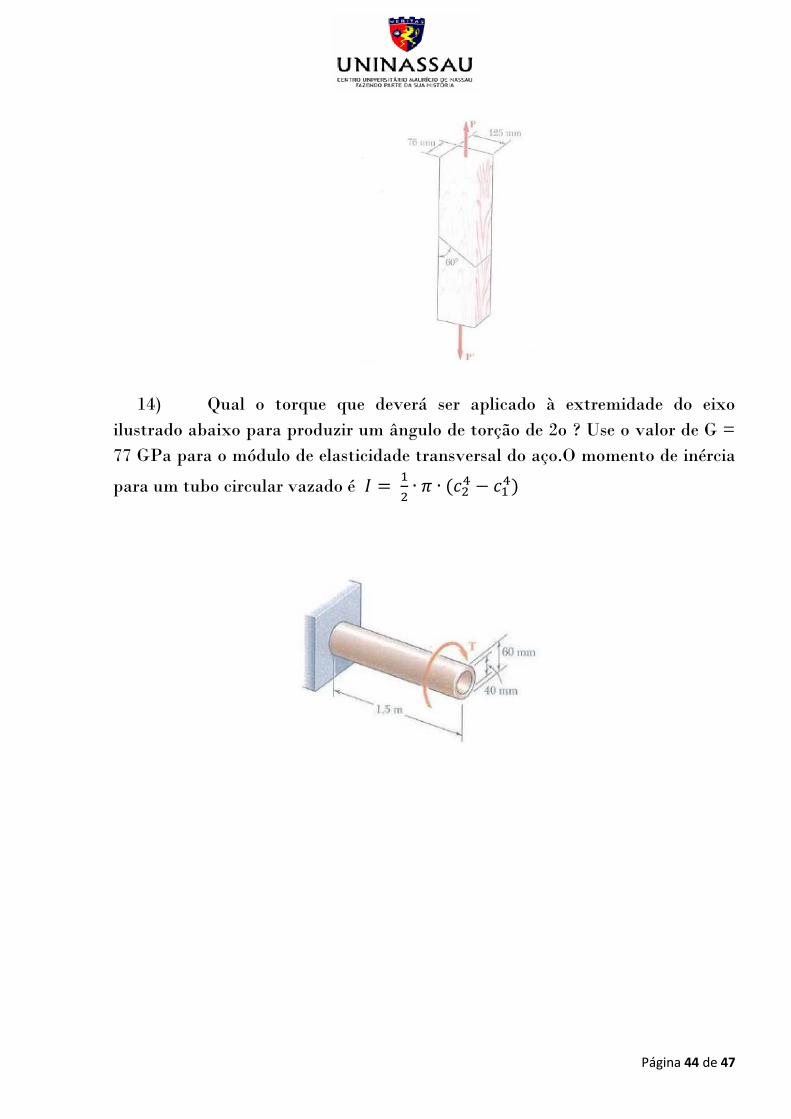
14) Qual o torque que deverá ser aplicado à extremidade do eixo
ilustrado abaixo para produzir um ângulo de torção de 2o ? Use o valor de G =
77 GPa para o módulo de elasticidade transversal do aço.O momento de inércia
para um tubo circular vazado é

Página 45 de 47
BIBLIOGRAFIA
1) SUSSEKIND, José Carlos, 1947.
Curso de Análise Estrutural/ José Carlos Sussekind, 6ª Ed., 1981
Editora Globo – Porto Alegre/Rio de Janeiro
2) HIBBELER, Russell Charles.
Resistência dos Materiais/ Russel Charles Hibbeler, 7ª ed., 2010
Pearson Prentice Hall – São Paulo
3) BEER. Ferdinand P., DEWOLF, John T., JOHNSTON, E. Russell, Jr.
Resistência dos Materiais/ Ferdinand Beer, John Dewolf & E. Russell
Johnston, 5ª ed., 2011
McGrawn Hilll – São Paulo

Página 46 de 47
APÊNDICE I - Gabarito – Lista de Exercícios 1ª Unidade
1.
a) Mmáx = 396,00 kNm; x = 3,2m do apoio da esquerda
b) Mmáx = 82,50 kNm; x = 2,0m do apoio da esquerda
c) Mmáx = 157,50 kNm; x = 0 (no apoio)
d) Mmáx = 294,34 kNm; x = 3,225m do apoio da esquerda
e) Mmáx = 161,00 kNm; x = 4,2m do apoio da esquerda
f) Mmáx = 652,50 kNm; x = 0 (no apoio)
2. Mmáx = 7,50 kNm; x = 3,0m do apoio da esquerda
3.
a) Mmáx = 4,00tfm; x = 8,0m do apoio mais à esquerda
b) Mmáx = 2,25tfm; x = 1,5m do apoio da esquerda
c) Mmáx = 6,00tfm; x = 0 (no apoio de 1⁰ gênero à esquerda)
4. · √

Página 47 de 47
APÊNDICE II - Gabarito – Lista de Exercícios 2ª Unidade
1. (a) 4,44 MPa e (b) 4,65 MPa
2. A = 381,97 MPa e B = 270,09 MPa
3. (a) máx = 0,081 MPa e (b) máx = 2,025 MPa (quebra)
4. máx = 40,49 MPa
5. Madm= 127,98 kNm
6. W0= 10,76 kN/m
7. (a) Q = 32,8 kN e (b) ∆LB=0,073mm
8.
9. (a) 3,33 MPa e (b) 525,225 mm
10. e
11. (a) P = 13,95 kN e (b)
12. e
13. (a) P = 6,25 kN e (b)
14. 1829 kNm



























